

Improving Directional Overcurrent Relay Coordination in Distribution Networks for Optimal Operation Using Hybrid Genetic Algorithm with Sequential Quadratic Programming



Abstract
:1. Introduction
1.1. Importance
1.2. Literature Review
1.3. Contributions
- It introduces a robust hybrid optimization algorithm that efficiently tackles the coordination problem of DOCRs by integrating the global exploration capabilities of genetic algorithms with the local refinement abilities of sequential quadratic programming.
- It implements the suggested GA-SQP method, which can result in a significant reduction in the operation times of primary/backup (P/B) relays for mid-point faults in power networks with DGs. This decrease guarantees that such networks are protected in a timely and effective manner.
1.4. Organization
2. Methodology
2.1. Problem Formulation
2.2. Enhancing Objective Function (OF) to Minimize Coordination Time Interval (CTI)
2.3. GA-SQP Hybrid Algorithm
2.3.1. GA Algorithm
2.3.2. SQP Algorithm
2.3.3. Hybrid Algorithm Based on GA and SQP
3. Case Studies (Result and Discussions)
3.1. Case Study 1 (3-Bus System)
3.2. Case Study 2 (8-Bus System)
3.3. Case Study 3 (30-Bus System)
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| A, B | Characteristic constants specific to the relays |
| CTI | Coordination time interval |
| DE | Differential evolution |
| DG | Distributed generation |
| DOCRs | Directional overcurrent relays |
| EGWO | Enhanced grey wolf optimization |
| EO | Evolutionary optimization |
| FDA | Flow direction algorithm |
| FPSOGSA | Fractional particle swarm optimization gravitational search algorithm |
| GA | Genetic algorithm |
| GWO | Grey wolf optimizer |
| HHO | Harris hawks’ optimization |
| HWGO | Hybrid whale and grey wolf optimizer |
| Fault current flowing through the operating coil of the relay | |
| Minimum fault current | |
| Maximum permissible current rating | |
| Maximum overload current | |
| LP | Linear programming |
| MPSO | Modified particle swarm optimization |
| MVO | Multi-verse optimization |
| N | Numbers of the primary relays |
| NFE | Number of function evaluations |
| Overall count of the primary/backup relay pairs | |
| OF | Objective function |
| OLF | Overload factor |
| p | Signifies each distinct primary/backup relay pair |
| P/B | Primary/backup |
| PM | Protection manager |
| PMU | Phasor measurement unit |
| Upper limit of the pickup setting | |
| Lower limit of the pickup setting | |
| PSM | Plug-setting multiplier |
| PSO | Particle swarm optimization |
| QP | Quadratic programming |
| SA | Simulated annealing |
| SQP | Sequential quadratic programming |
| Operating time of the primary relay in line k | |
| Operating time of the backup relay in line k | |
| TMS | Time-multiplier setting |
| Upper limit of the time-multiplier setting | |
| Lower limit of the time-multiplier setting | |
| Activation times of the backup relays | |
| Activation times of the primary relays | |
| , and | Control weighting factors |
| Disparity in the operating time between the primary and backup relays |
References
- Mozina, C.J. Impact of smart grids and green power generation on distribution systems. IEEE Trans. Ind. Appl. 2013, 49, 1079–1090. [Google Scholar] [CrossRef]
- Yang, H.; Wen, F.; Ledwich, G. Optimal coordination of overcurrent relays in distribution systems with distributed generators based on differential evolution algorithm. Int. Trans. Electr. Energy Syst. 2013, 23, 1–12. [Google Scholar] [CrossRef]
- MinuYadav, C.G.; Kumar, S.V.; Hasan, I. Optimal Coordination of Directional Overcurrent Relay: A. Int. J. Emerg. Technol. Adv. Eng. 2004, 4, 859–862. [Google Scholar]
- Wadood, A.; Farkoush, S.G.; Khurshaid, T.; Yu, J.T.; Kim, C.H.; Rhee, S.B. Application of the jaya algorithm in solving the problem of the optimal coordination of overcurrent relays in single-and multi-loop distribution systems. Complexity 2019, 2019, 5876318. [Google Scholar] [CrossRef]
- Rajput, V.N.; Adelnia, F.; Pandya, K.S. Optimal coordination of directional overcurrent relays using improved mathematical formulation. IET Gener. Transm. Distrib. 2018, 12, 2086–2094. [Google Scholar] [CrossRef]
- Sarwagya, K.; Nayak, P.K.; Ranjan, S. Optimal coordination of directional overcurrent relays in complex distribution networks using sine cosine algorithm. Electr. Power Syst. Res. 2020, 187, 106435. [Google Scholar] [CrossRef]
- Rawala, B.; Khan, S.; Karki, M. Optimal Protection Coordination for Microgrid with Grid Connected and Islanded Capabilities Using Dual Setting Directional Over Current Relays. In Proceedings of the 10th IOE Graduate Conference, Online, 30 September–2 October 2021; Volume 10, pp. 630–636. [Google Scholar]
- Sarkar, D.; Kudkelwar, S. Optimal over current relay coordination in Microgrid using a novel hybrid Water Cycle-Moth Flame algorithm. Int. J. Syst. Assur. Eng. Manag. 2021, 12, 553–564. [Google Scholar] [CrossRef]
- Damchi, Y.; Dolatabadi, M.; Mashhadi, H.R.; Sadeh, J. MILP approach for optimal coordination of directional overcurrent relays in interconnected power systems. Electr. Power Syst. Res. 2018, 158, 267–274. [Google Scholar] [CrossRef]
- Chabanloo, R.M.; Safari, M.; Roshanagh, R.G. Reducing the scenarios of network topology changes for adaptive coordination of overcurrent relays using hybrid GA–LP. IET Gener. Transm. Distrib. 2018, 12, 5879–5890. [Google Scholar] [CrossRef]
- Khurshaid, T.; Wadood, A.; Farkoush, S.G.; Kim, C.H.; Cho, N.; Rhee, S.B. Modified particle swarm optimizer as optimization of time dial settings for coordination of directional overcurrent relay. J. Electr. Eng. Technol. 2019, 14, 55–68. [Google Scholar] [CrossRef]
- Abdelsalam, M.; Diab, H.Y. Optimal coordination of DOC relays incorporated into a distributed generation-based micro-grid using a Meta-Heuristic MVO algorithm. Energies 2019, 12, 4115. [Google Scholar] [CrossRef]
- Kida, A.A.; Rivas, A.E.L.; Gallego, L.A. An improved simulated annealing–linear programming hybrid algorithm applied to the optimal coordination of directional overcurrent relays. Electr. Power Syst. Res. 2020, 181, 106197. [Google Scholar] [CrossRef]
- ElSayed, S.K.; Elattar, E.E. Hybrid Harris hawks optimization with sequential quadratic programming for optimal coordination of directional overcurrent relays incorporating distributed generation. Alex. Eng. J. 2021, 60, 2421–2433. [Google Scholar] [CrossRef]
- Shrivastava, A.; Sharma, A.; Pandit, M.; Jately, V.; Azzopardi, B. Hybrid protection scheme based optimal overcurrent relay coordination strategy for RE integrated power distribution grid. Energies 2021, 14, 7192. [Google Scholar] [CrossRef]
- Bakhshipour, M.; Namdari, F.; Samadinasab, S. Optimal coordination of overcurrent relays with constraining communication links using DE–GA algorithm. Electr. Eng. 2021, 103, 2243–2257. [Google Scholar] [CrossRef]
- Korashy, A.; Kamel, S.; Shahinzadeh, H.; Kabalci, E.; Jurado, F. Different Optimization Techniques For Solving the Coordination problem of DOCRs. In Proceedings of the 2022 4th Global Power, Energy and Communication Conference (GPECOM), Nevsehir, Turkey, 14–17 June 2022; pp. 499–505. [Google Scholar]
- Vyas, D.; Bhatt, P.; Shukla, V. Coordination of directional overcurrent relays for distribution system using particle swarm optimization. Int. J. Smart Grid Clean Energy 2020, 9, 290–297. [Google Scholar] [CrossRef]
- Kamel, S.; Korashy, A.; Youssef, A.R.; Jurado, F. Development and application of an efficient optimizer for optimal coordination of directional overcurrent relays. Neural Comput. Appl. 2020, 32, 8561–8583. [Google Scholar] [CrossRef]
- Thararak, P.; Jirapong, P. Implementation of optimal protection coordination for microgrids with distributed generations using quaternary protection scheme. J. Electr. Comput. Eng. 2020, 2020, 2568652. [Google Scholar] [CrossRef]
- Saldarriaga-Zuluaga, S.D.; López-Lezama, J.M.; Muñoz-Galeano, N. Optimal coordination of overcurrent relays in microgrids considering a non-standard characteristic. Energies 2020, 13, 922. [Google Scholar] [CrossRef]
- Muhammad, Y.; Raja, M.A.Z.; Shah, M.A.A.; Awan, S.E.; Ullah, F.; Chaudhary, N.I.; Cheema, K.M.; Milyani, A.H.; Shu, C.M. Optimal coordination of directional overcurrent relays using hybrid fractional computing with gravitational search strategy. Energy Rep. 2021, 7, 7504–7519. [Google Scholar] [CrossRef]
- Rashedi, E.; Nezamabadi-Pour, H.; Saryazdi, S. GSA: A gravitational search algorithm. Inf. Sci. 2009, 179, 2232–2248. [Google Scholar] [CrossRef]
- Menos-Aikateriniadis, C.; Lamprinos, I.; Georgilakis, P.S. particle swarm optimization in residential demand-side management: A review on scheduling and control algorithms for demand response provision. Energies 2022, 15, 2211. [Google Scholar] [CrossRef]
- Kumar, L.; Kar, M.K.; Kumar, S. Statistical analysis based reactive power optimization using improved differential evolutionary algorithm. Expert Syst. 2023, 40, e13091. [Google Scholar] [CrossRef]
- Al-Kaabi, M.; Al-Bahrani, L.; Dumbrava, V.; Eremia, M. Optimal power flow with four objective functions using improved differential evolution algorithm: Case study IEEE 57-bus power system. In Proceedings of the 2021 10th International Conference on Energy and Environment (CIEM), Bucharest, Romania, 14–15 October 2021; pp. 1–5. [Google Scholar]
- Layth, A.B.; Murtadha, A.K.; Jaleel, A. Solving optimal power flow problem using improved differential evolution algorithm. Int. J. Electr. Electron. Eng. Telecommun. 2022, 11, 146–155. [Google Scholar]
- Al-Kaabi, M.; Al Hasheme, J.; Al-Bahrani, L. Improved Differential Evolution Algorithm to solve multi-objective of optimal power flow problem. Arch. Electr. Eng. 2022, 71, 641–657. [Google Scholar]
- Deng, K.; Song, L.K.; Bai, G.C.; Li, X.Q. Improved Kriging-based hierarchical collaborative approach for multi-failure dependent reliability assessment. Int. J. Fatigue 2022, 160, 106842. [Google Scholar] [CrossRef]
- Li, X.Q.; Song, L.K.; Bai, G.C. Deep learning regression-based stratified probabilistic combined cycle fatigue damage evaluation for turbine bladed disks. Int. J. Fatigue 2022, 159, 106812. [Google Scholar] [CrossRef]
- Li, X.Q.; Song, L.K.; Bai, G.C.; Li, D.G. Physics-informed distributed modeling for CCF reliability evaluation of aeroengine rotor systems. Int. J. Fatigue 2023, 167, 107342. [Google Scholar] [CrossRef]
- Li, X.Q.; Song, L.K.; Choy, Y.S.; Bai, G.C. Multivariate ensembles-based hierarchical linkage strategy for system reliability evaluation of aeroengine cooling blades. Aerosp. Sci. Technol. 2023, 138, 108325. [Google Scholar] [CrossRef]
- Al-Kaabi, M.; Dumbrava, V.; Eremia, M. A slime mould algorithm programming for solving single and multi-objective optimal power flow problems with pareto front approach: A case study of the iraqi super grid high voltage. Energies 2022, 15, 7473. [Google Scholar] [CrossRef]
- Al-Roomi, A.R. Optimal Coordination of Power Protective Devices with Illustrative Examples; John Wiley & Sons: Hoboken, NJ, USA, 2021. [Google Scholar]
- IEC 60255-151; Measuring Relays and Protection Equipment-Part 151: Functional Requirements of over/under Current Protection. IEC: Geneva, Switzerland, 2009.
- IEEE Std C37.112-2018 (Revision of IEEE Std C37.112-1996); IEEE Standard for Inverse-Time Characteristics Equations for Overcurrent Relays. IEEE: Piscataway, NJ, USA, 2019; pp. 1–25. [CrossRef]
- Schoenauer, M.; Xanthakis, S. Constrained GA optimization. In Proceedings of the 5th International Conference on Genetic Algorithms, Urbana-Champaign, IL, USA, 17–21 July 1993; Morgan Kaufmann: Burlington, MA, USA, 1993; pp. 573–580. [Google Scholar]
- Liu, T.; Li, D. Convergence of the BFGS-SQP method for degenerate problems. Numer. Funct. Anal. Optim. 2007, 28, 927–944. [Google Scholar] [CrossRef]
- Singh, M.; Panigrahi, B.; Abhyankar, A. Optimal coordination of directional over-current relays using Teaching Learning-Based Optimization (TLBO) algorithm. Int. J. Electr. Power Energy Syst. 2013, 50, 33–41. [Google Scholar] [CrossRef]
- Thangaraj, R.; Pant, M.; Deep, K. Optimal coordination of over-current relays using modified differential evolution algorithms. Eng. Appl. Artif. Intell. 2010, 23, 820–829. [Google Scholar] [CrossRef]
- Amraee, T. Coordination of Directional Overcurrent Relays Using Seeker Algorithm. IEEE Trans. Power Deliv. 2012, 27, 1415–1422. [Google Scholar] [CrossRef]
- Mansour, M.M.; Mekhamer, S.F.; El-Kharbawe, N. A modified particle swarm optimizer for the coordination of directional overcurrent relays. IEEE Trans. Power Deliv. 2007, 22, 1400–1410. [Google Scholar] [CrossRef]
- Albasri, F.A.; Alroomi, A.R.; Talaq, J.H. Optimal coordination of directional overcurrent relays using biogeography-based optimization algorithms. IEEE Trans. Power Deliv. 2015, 30, 1810–1820. [Google Scholar] [CrossRef]
- Khurshaid, T.; Wadood, A.; Farkoush, S.G.; Yu, J.; Kim, C.H.; Rhee, S.B. An improved optimal solution for the directional overcurrent relays coordination using hybridized whale optimization algorithm in complex power systems. IEEE Access 2019, 7, 90418–90435. [Google Scholar] [CrossRef]
- Ezzeddine, M.; Kaczmarek, R.; Iftikhar, M. Coordination of directional overcurrent relays using a novel method to select their settings. IET Gener. Transm. Distrib. 2011, 5, 743–750. [Google Scholar] [CrossRef]
- Noghabi, A.S.; Sadeh, J.; Mashhadi, H.R. Considering different network topologies in optimal overcurrent relay coordination using a hybrid GA. IEEE Trans. Power Deliv. 2009, 24, 1857–1863. [Google Scholar] [CrossRef]
- Sulaiman, M.; Waseem; Muhammad, S.; Khan, A. Improved solutions for the optimal coordination of docrs using firefly algorithm. Complexity 2018, 2018, 7039790. [Google Scholar] [CrossRef]
- Bouchekara, H.; Zellagui, M.; Abido, M.A. Optimal coordination of directional overcurrent relays using a modified electromagnetic field optimization algorithm. Appl. Soft Comput. 2017, 54, 267–283. [Google Scholar] [CrossRef]
- Alam, M.N.; Das, B.; Pant, V. A comparative study of metaheuristic optimization approaches for directional overcurrent relays coordination. Electr. Power Syst. Res. 2015, 128, 39–52. [Google Scholar] [CrossRef]
- Radosavljević, J.; Jevtić, M. Hybrid GSA-SQP algorithm for optimal coordination of directional overcurrent relays. IET Gener. Transm. Distrib. 2016, 10, 1928–1937. [Google Scholar] [CrossRef]
- Srinivas, S.T.P.; Shanti Swarup, K. Application of improved invasive weed optimization technique for optimally setting directional overcurrent relays in power systems. Appl. Soft Comput. 2019, 79, 1–13. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | [3,4] | [5,6,7,8,9,10] | [11,12] | [13,14,15,16,17] | [18,19,20] | [21,22,23] | Proposed Method |
|---|---|---|---|---|---|---|---|
| Interconnected non-radial power networks | ✓ | ✗ | ✓ | ✗ | ✓ | ✓ | ✓ |
| Consideration of the DG effect | ✗ | ✓ | ✗ | ✓ | ✗ | ✗ | ✓ |
| No getting stuck in local optimal points | ✗ | ✗ | ✗ | ✓ | ✗ | ✓ | ✓ |
| Optimal coordination using hybrid algorithm frame | ✗ | ✗ | ✗ | ✓ | ✗ | ✓ | ✓ |
| Mid-point faults facility | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ |
| Forming relay numbers automatically | ✗ | ✗ | ✗ | ✗ | ✓ | ✗ | ✓ |
| Primary Relay | Fault Current (A) | Backup Relay | Fault Current (A) |
|---|---|---|---|
| R1 | 1961.2 | R6 | 172.7 |
| R2 | 1515.4 | R4 | 544.9 |
| R3 | 1678.9 | R1 | 611.8 |
| R4 | 1816.5 | R5 | 467.4 |
| R5 | 1765.1 | R2 | 144.6 |
| R6 | 1499.8 | R3 | 385.3 |
| Relay Pairs | GA | GA-SQP | |||||
|---|---|---|---|---|---|---|---|
| Primary | Backup | Tp (s) | Tb (s) | CTI (s) | Tp (s) | Tb (s) | CTI (s) |
| R1 | R6 | 0.225 | 0.425 | 0.200 | 0.223 | 0.423 | 0.200 |
| R2 | R4 | 0.201 | 0.401 | 0.200 | 0.200 | 0.400 | 0.200 |
| R3 | R1 | 0.201 | 0.399 | 0.198 | 0.200 | 0.400 | 0.200 |
| R4 | R5 | 0.231 | 0.431 | 0.200 | 0.230 | 0.430 | 0.200 |
| R5 | R2 | 0.236 | 0.436 | 0.200 | 0.235 | 0.436 | 0.200 |
| R6 | R3 | 0.237 | 0.437 | 0.200 | 0.236 | 0.436 | 0.201 |
| Relay No. | GA | GA-SQP | ||
|---|---|---|---|---|
| TMS (s) | PS (pu) | TMS (s) | PS (pu) | |
| R1 | 0.090 | 0.156 | 0.088 | 0.161 |
| R2 | 0.133 | 0.021 | 0.133 | 0.021 |
| R3 | 0.081 | 0.128 | 0.081 | 0.127 |
| R4 | 0.098 | 0.120 | 0.097 | 0.123 |
| R5 | 0.104 | 0.106 | 0.103 | 0.106 |
| R6 | 0.179 | 0.012 | 0.177 | 0.012 |
| OF (s) | 1.330 | 1.324 | ||
| Ref. | Method | The Algorithm’s Parameters for 3-Bus Test System | Objective Function | ||||||
|---|---|---|---|---|---|---|---|---|---|
| TMSmin | TMSmax | PSmin | PSmax | PS Mode | CTI | NFE | |||
| [39] | TLBO (MOF) | 0.025 | 1.2 | continuous | 0.3 | N/A | 6.972 | ||
| [39] | TLBO | 0.025 | 1.2 | continuous | 0.3 | N/A | 5.335 | ||
| [40] | MDE | 0.05 | 1.1 | continuous | 0.3 | 38250 | 4.781 | ||
| [41] | MINLP | 0.1 | 1.1 | 1.5 | 2.5 | discrete | 0.3 | 85 | 1.727 |
| [41] | SA | 0.1 | 1.1 | 1.5 | 3 | discrete | 0.3 | 85 | 1.599 |
| [42] | MSPO | 0.1 | 1.1 | 1.5 | 5 | discrete | 0.2 | 200 | 1.926 |
| [43] | BBO-LP | 0.1 | 1.1 | 1.5 | 3 | discrete | 0.2 | 20 | 1.599 |
| [44] | WOA | 0.05 | 1.1 | 1.5 | 5 | continuous | 0.3 | 130 | 1.526 |
| [44] | HWOA | 0.05 | 1.1 | 1.5 | 5 | continuous | 0.3 | 50 | 1.503 |
| Proposed GA-SQP | 0.05 | 1.1 | continuous | 0.2 | 100 | 1.324 | |||
| Primary Relay | Fault Current (A) | Backup Relay | Fault Current (A) |
|---|---|---|---|
| R1 | 3500.5 | R6 | 638.4 |
| R2 | 1710.0 | R8 | 1704.2 |
| R3 | 3521.6 | R2 | 533.2 |
| R3 | 3521.6 | R6 | 1009.0 |
| R4 | 1892.0 | R10 | 1948.8 |
| R5 | 2883.8 | R2 | 11.2 |
| R5 | 2883.8 | R4 | 847.0 |
| R6 | 2905.6 | R7 | 3.8 |
| R6 | 2905.6 | R13 | 886.0 |
| R7 | 1622.5 | R1 | 1616.5 |
| R8 | 3660.4 | R5 | 697.6 |
| R8 | 3660.4 | R13 | 1014.0 |
| R9 | 2104.5 | R3 | 2015.9 |
| R10 | 3294.0 | R12 | 1015.9 |
| R11 | 3242.1 | R9 | 961.4 |
| R12 | 2197.8 | R14 | 2104.4 |
| R13 | 1901.2 | R11 | 1956.3 |
| R14 | 3615.3 | R5 | 1041.2 |
| R14 | 3615.3 | R7 | 550.5 |
| Relay Pairs | GA | GA-SQP | |||||
|---|---|---|---|---|---|---|---|
| Primary | Backup | Tp (s) | Tb (s) | CTI (s) | Tp (s) | Tb (s) | CTI (s) |
| R1 | R4 | 0.322 | 0.523 | 0.200 | 0.287 | 0.487 | 0.200 |
| R1 | R6 | 0.322 | 0.401 | 0.200 | 0.287 | 1.184 | 0.896 |
| R2 | R8 | 0.204 | 0.404 | 0.200 | 0.200 | 0.400 | 0.200 |
| R3 | R2 | 0.466 | 0.666 | 0.200 | 0.323 | 0.627 | 0.304 |
| R3 | R6 | 0.466 | 0.666 | 0.200 | 0.323 | 0.523 | 0.200 |
| R4 | R10 | 0.340 | 0.540 | 0.200 | 0.310 | 0.513 | 0.203 |
| R5 | R2 | 0.349 | - | - | 0.256 | - | - |
| R5 | R4 | 0.349 | 0.572 | 0.223 | 0.256 | 0.537 | 0.281 |
| R6 | R7 | 0.316 | - | - | 0.226 | - | - |
| R6 | R13 | 0.316 | 0.613 | 0.297 | 0.226 | 0.562 | 0.336 |
| R7 | R1 | 0.277 | 0.477 | 0.200 | 0.207 | 0.407 | 0.200 |
| R8 | R5 | 0.348 | 1.013 | 0.665 | 0.299 | 0.894 | 0.595 |
| R8 | R13 | 0.348 | 0.548 | 0.200 | 0.299 | 0.499 | 0.200 |
| R9 | R3 | 0.396 | 0.596 | 0.200 | 0.246 | 0.446 | 0.200 |
| R10 | R12 | 0.425 | 0.625 | 0.200 | 0.370 | 0.570 | 0.200 |
| R11 | R9 | 0.446 | 0.646 | 0.200 | 0.362 | 0.563 | 0.201 |
| R12 | R14 | 0.386 | 0.586 | 0.200 | 0.250 | 0.450 | 0.200 |
| R13 | R11 | 0.365 | 0.565 | 0.200 | 0.326 | 0.528 | 0.202 |
| R14 | R5 | 0.462 | 0.662 | 0.200 | 0.327 | 0.527 | 0.200 |
| R14 | R7 | 0.462 | 0.662 | 0.200 | 0.327 | 0.598 | 0.271 |
| Relay No. | GA | GA-SQP | ||
|---|---|---|---|---|
| TMS (s) | PS (pu) | TMS (s) | PS (pu) | |
| R1 | 0.114 | 0.808 | 0.113 | 0.621 |
| R2 | 0.050 | 0.821 | 0.050 | 0.796 |
| R3 | 0.179 | 0.666 | 0.097 | 1.173 |
| R4 | 0.099 | 0.665 | 0.087 | 0.719 |
| R5 | 0.111 | 0.845 | 0.075 | 1.014 |
| R6 | 0.094 | 0.991 | 0.062 | 1.151 |
| R7 | 0.076 | 0.646 | 0.050 | 0.799 |
| R8 | 0.304 | 0.030 | 0.137 | 0.426 |
| R9 | 0.118 | 0.706 | 0.050 | 1.346 |
| R10 | 0.156 | 0.699 | 0.103 | 1.260 |
| R11 | 0.159 | 0.741 | 0.085 | 1.665 |
| R12 | 0.115 | 0.741 | 0.050 | 1.434 |
| R13 | 0.102 | 0.732 | 0.087 | 0.784 |
| R14 | 0.176 | 0.695 | 0.096 | 1.262 |
| OF (s) | 5.101 | 3.989 | ||
| Ref. | Method | The Algorithm’s Parameters for 8Bus Test System | Objective Function | ||||||
|---|---|---|---|---|---|---|---|---|---|
| TMSmin | TMSmax | PSmin | PSmax | PS Mode | CTI | NFE | |||
| [45] | LM | 0.05 | 1.1 | 0.5 | 2 | discrete | N/A | N/A | 11.065 |
| [46] | GA | 0.1 | 1.1 | 0.5 | 2.5 | discrete | 0.3 | 100000 | 11.001 |
| [46] | HGA-LP | 0.1 | 1.1 | 0.5 | 2.5 | discrete | 0.3 | 30 | 10.950 |
| [43] | BBO-LP | 0.1 | 1.1 | 0.5 | 2.5 | discrete | 0.3 | 30 | 8.756 |
| [41] | SA | 0.1 | 1.1 | 1.5 | 2.5 | discrete | 0.3 | 169 | 8.427 |
| [9] | MILP | 0.1 | 1.1 | 0.5 | 2.5 | discrete | 0.3 | N/A | 8.006 |
| [47] | FA | 0.05 | 1.1 | 1.25 | 1.5 | discrete | 0.2 | 49980 | 6.646 |
| [45] | NLP | 0.05 | 1.1 | 0.5 | 2 | discrete | N/A | N/A | 6.412 |
| [48] | MEFO | 0.05 | 1.1 | 0.5 | 2 | discrete | 0.3 | 11213 | 6.349 |
| [44] | WOA | 0.1 | 1.2 | 1.25 | 2.5 | continuous | 0.3 | 120 | 5.954 |
| [44] | HWOA | 0.1 | 1.2 | 1.25 | 2.5 | continuous | 0.3 | 115 | 5.857 |
| Proposed GA-SQP | 0.05 | 1.1 | continuous | 0.2 | 100 | 3.989 | |||
| Primary Relay | Fault Current (A) | Backup Relay | Fault Current (A) | Primary Relay | Fault Current (A) | Backup Relay | Fault Current (A) | Primary Relay | Fault Current (A) | Backup Relay | Fault Current (A) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| R1 | 11607.3 | R4 | 724.0 | R14 | 2386.1 | R17 | 457.0 | R31 | 6173.6 | R37 | 1520.8 |
| R1 | 11607.3 | R20 | 1835.9 | R15 | 4879.0 | R11 | 756.2 | R31 | 6173.6 | R42 | 1122.5 |
| R1 | 11607.3 | R22 | 1953.9 | R15 | 4879.0 | R14 | 83.2 | R32 | 3458.8 | R28 | 3459.7 |
| R2 | 5334.1 | R6 | 5316.6 | R16 | 1467.1 | R18 | 1466.0 | R33 | 9323.1 | R30 | 1479.9 |
| R3 | 8416.0 | R2 | 1836.5 | R17 | 1937.0 | R15 | 1936.3 | R33 | 9323.1 | R36 | 499.1 |
| R3 | 8416.0 | R20 | 1513.7 | R18 | 2961.1 | R13 | 964.3 | R34 | 5167.9 | R32 | 2032.0 |
| R3 | 8416.0 | R22 | 1613.0 | R19 | 12710.9 | R2 | 1877.2 | R34 | 5167.9 | R37 | 1534.8 |
| R4 | 6017.0 | R5 | 2017.5 | R19 | 12710.9 | R4 | 1226.5 | R34 | 5167.9 | R42 | 1598.3 |
| R4 | 6017.0 | R8 | 1972.9 | R19 | 12710.9 | R22 | 1761.3 | R35 | 6877.4 | R30 | 1160.9 |
| R5 | 7071.5 | R1 | 7050.5 | R20 | 2890.3 | R25 | 2878.3 | R35 | 6877.4 | R34 | 521.6 |
| R6 | 8843.0 | R3 | 3355.3 | R21 | 8401.6 | R2 | 1210.3 | R36 | 3875.0 | R38 | 1602.0 |
| R6 | 8843.0 | R8 | 2644.0 | R21 | 8401.6 | R4 | 792.5 | R37 | 4449.1 | R35 | 2093.6 |
| R7 | 7461.8 | R3 | 2244.6 | R21 | 8401.6 | R20 | 1008.6 | R38 | 5485.2 | R32 | 1515.5 |
| R7 | 7461.8 | R5 | 3431.3 | R22 | 3673.9 | R23 | 3673.1 | R38 | 5485.2 | R33 | 2798.2 |
| R8 | 3674.5 | R10 | 1862.6 | R23 | 5630.6 | R27 | 2639.7 | R38 | 5485.2 | R42 | 1191.5 |
| R8 | 3674.5 | R39 | 1804.3 | R24 | 4758.2 | R21 | 4756.5 | R39 | 3235.7 | R41 | 3236.4 |
| R9 | 4157.0 | R7 | 2806.8 | R25 | 4048.8 | R29 | 4048.7 | R40 | 4494.0 | R7 | 3028.6 |
| R9 | 4157.0 | R39 | 1352.2 | R26 | 6113.7 | R19 | 6113.8 | R40 | 4494.0 | R10 | 1468.8 |
| R10 | 3219.9 | R12 | 3223.8 | R27 | 3569.0 | R31 | 83.6 | R41 | 6594.1 | R32 | 1475.1 |
| R11 | 2403.8 | R9 | 2400.5 | R28 | 5820.0 | R24 | 3205.2 | R41 | 6594.1 | R33 | 3612.4 |
| R12 | 7288.1 | R14 | 630.3 | R29 | 10286.5 | R34 | 1483.5 | R41 | 6594.1 | R37 | 1538.6 |
| R12 | 7288.1 | R16 | 437.0 | R29 | 10286.5 | R36 | 983.1 | R42 | 2587.7 | R40 | 2583.2 |
| R13 | 3670.5 | R11 | 629.1 | R30 | 3421.7 | R26 | 3417.6 | ||||
| R13 | 3670.5 | R16 | 458.2 | R31 | 6173.6 | R33 | 3560.7 |
| Relay Pairs | GA | GA-SQP | Relay Pairs | GA | GA-SQP | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Primary | Backup | Tp (s) | Tb (s) | CTI (s) | Tp (s) | Tb (s) | CTI (s) | Primary | Backup | Tp (s) | Tb (s) | CTI (s) | Tp (s) | Tb (s) | CTI (s) |
| R1 | R4 | 0.700 | 1.322 | 0.622 | 0.337 | 0.746 | 0.409 | R21 | R4 | 1.048 | 1.249 | 0.202 | 0.485 | 0.688 | 0.202 |
| R1 | R20 | 0.700 | 0.939 | 0.239 | 0.337 | 0.537 | 0.200 | R21 | R20 | 1.048 | 1.251 | 0.203 | 0.485 | 0.881 | 0.396 |
| R1 | R22 | 0.700 | 0.901 | 0.201 | 0.337 | 0.537 | 0.200 | R22 | R23 | 0.517 | 0.730 | 0.213 | 0.279 | 0.479 | 0.200 |
| R2 | R6 | 0.704 | 0.905 | 0.200 | 0.194 | 0.394 | 0.200 | R23 | R27 | 0.647 | 0.853 | 0.206 | 0.323 | 0.523 | 0.200 |
| R3 | R2 | 0.743 | 1.032 | 0.289 | 0.252 | 0.484 | 0.232 | R24 | R21 | 0.994 | 1.238 | 0.244 | 0.462 | 0.662 | 0.200 |
| R3 | R20 | 0.743 | 1.021 | 0.278 | 0.252 | 0.614 | 0.362 | R25 | R29 | 0.857 | 1.058 | 0.201 | 0.453 | 0.653 | 0.200 |
| R3 | R22 | 0.743 | 1.159 | 0.416 | 0.252 | 0.745 | 0.493 | R26 | R19 | 0.596 | 0.802 | 0.205 | 0.281 | 0.481 | 0.200 |
| R4 | R5 | 0.553 | 1.331 | 0.778 | 0.247 | 1.148 | 0.901 | R27 | R31 | 0.750 | 0.951 | 0.201 | 0.402 | 0.602 | 0.200 |
| R4 | R8 | 0.553 | 1.096 | 0.543 | 0.247 | 0.540 | 0.293 | R28 | R24 | 0.916 | 1.139 | 0.223 | 0.461 | 0.662 | 0.201 |
| R5 | R1 | 0.701 | 0.906 | 0.206 | 0.257 | 0.457 | 0.200 | R29 | R34 | 0.804 | 1.057 | 0.253 | 0.330 | 0.557 | 0.227 |
| R6 | R3 | 0.756 | 0.958 | 0.202 | 0.273 | 0.473 | 0.200 | R29 | R36 | 0.804 | 1.057 | 0.253 | 0.330 | 0.574 | 0.245 |
| R6 | R8 | 0.756 | 0.958 | 0.203 | 0.273 | 0.473 | 0.200 | R30 | R26 | 0.574 | 0.775 | 0.201 | 0.250 | 0.450 | 0.200 |
| R7 | R3 | 0.764 | 1.094 | 0.330 | 0.267 | 0.762 | 0.494 | R31 | R33 | 0.817 | 1.092 | 0.275 | 0.403 | 0.603 | 0.200 |
| R7 | R5 | 0.764 | 0.966 | 0.201 | 0.267 | 0.467 | 0.200 | R31 | R37 | 0.817 | 1.089 | 0.272 | 0.403 | 0.606 | 0.203 |
| R8 | R10 | 0.839 | 1.041 | 0.202 | 0.415 | 0.615 | 0.200 | R31 | R42 | 0.817 | 1.084 | 0.267 | 0.403 | 0.949 | 0.546 |
| R8 | R39 | 0.839 | 1.040 | 0.201 | 0.415 | 0.615 | 0.200 | R32 | R28 | 0.808 | 1.017 | 0.209 | 0.371 | 0.571 | 0.200 |
| R9 | R7 | 0.554 | 1.042 | 0.488 | 0.247 | 0.646 | 0.399 | R33 | R30 | 0.713 | 0.912 | 0.200 | 0.255 | 0.455 | 0.200 |
| R9 | R39 | 0.554 | 1.123 | 0.569 | 0.247 | 0.856 | 0.609 | R33 | R36 | 0.713 | 1.493 | 0.780 | 0.255 | 1.071 | 0.816 |
| R10 | R12 | 0.872 | 1.080 | 0.207 | 0.359 | 0.559 | 0.200 | R34 | R32 | 0.707 | 0.961 | 0.254 | 0.351 | 0.551 | 0.200 |
| R11 | R9 | 0.486 | 0.686 | 0.200 | 0.169 | 0.369 | 0.200 | R34 | R37 | 0.707 | 1.086 | 0.379 | 0.351 | 0.597 | 0.245 |
| R12 | R14 | 0.623 | 0.824 | 0.201 | 0.285 | 0.485 | 0.200 | R34 | R42 | 0.707 | 0.907 | 0.200 | 0.351 | 0.551 | 0.200 |
| R12 | R16 | 0.623 | 0.825 | 0.201 | 0.285 | 0.508 | 0.223 | R35 | R30 | 0.802 | 1.098 | 0.296 | 0.176 | 0.595 | 0.418 |
| R13 | R11 | 0.525 | 0.779 | 0.254 | 0.233 | 0.501 | 0.268 | R35 | R34 | 0.802 | 1.778 | 0.975 | 0.176 | 1.070 | 0.894 |
| R13 | R16 | 0.525 | 0.807 | 0.282 | 0.233 | 0.475 | 0.242 | R36 | R38 | 0.660 | 0.869 | 0.209 | 0.293 | 0.494 | 0.201 |
| R14 | R17 | 0.635 | 0.835 | 0.200 | 0.372 | 0.572 | 0.200 | R37 | R35 | 0.802 | 1.002 | 0.200 | 0.209 | 0.459 | 0.250 |
| R15 | R11 | 0.519 | 0.720 | 0.201 | 0.194 | 0.395 | 0.201 | R38 | R32 | 0.660 | 1.073 | 0.413 | 0.374 | 0.750 | 0.377 |
| R15 | R14 | 0.519 | 1.465 | 0.947 | 0.194 | 0.877 | 0.683 | R38 | R33 | 0.660 | 1.258 | 0.598 | 0.374 | 0.911 | 0.537 |
| R16 | R18 | 0.524 | 0.728 | 0.204 | 0.181 | 0.391 | 0.209 | R38 | R42 | 0.660 | 1.049 | 0.389 | 0.374 | 0.846 | 0.473 |
| R17 | R15 | 0.552 | 0.756 | 0.203 | 0.206 | 0.408 | 0.201 | R39 | R41 | 0.904 | 1.107 | 0.203 | 0.390 | 0.613 | 0.223 |
| R18 | R13 | 0.618 | 0.821 | 0.202 | 0.217 | 0.417 | 0.200 | R40 | R7 | 0.809 | 1.014 | 0.205 | 0.383 | 0.583 | 0.200 |
| R19 | R2 | 0.633 | 1.022 | 0.389 | 0.269 | 0.469 | 0.200 | R40 | R10 | 0.809 | 1.135 | 0.326 | 0.383 | 0.889 | 0.506 |
| R19 | R4 | 0.633 | 0.986 | 0.353 | 0.269 | 0.499 | 0.230 | R41 | R32 | 0.885 | 1.084 | 0.200 | 0.351 | 0.776 | 0.425 |
| R19 | R22 | 0.633 | 1.024 | 0.391 | 0.269 | 0.633 | 0.363 | R41 | R33 | 0.885 | 1.084 | 0.199 | 0.351 | 0.591 | 0.240 |
| R20 | R25 | 0.788 | 0.991 | 0.203 | 0.413 | 0.613 | 0.200 | R41 | R37 | 0.885 | 1.085 | 0.200 | 0.351 | 0.594 | 0.243 |
| R21 | R2 | 1.048 | 1.257 | 0.209 | 0.485 | 1.142 | 0.656 | R42 | R40 | 0.742 | 0.944 | 0.202 | 0.350 | 0.550 | 0.200 |
| Relay No. | GA | GA-SQP | Relay No. | GA | GA-SQP | ||||
|---|---|---|---|---|---|---|---|---|---|
| TMS (s) | PS (pu) | TMS (s) | PS (pu) | TMS (s) | PS (pu) | TMS (s) | PS (pu) | ||
| R1 | 0.227 | 0.717 | 0.094 | 0.971 | R22 | 0.112 | 0.470 | 0.053 | 0.560 |
| R2 | 0.358 | 0.098 | 0.051 | 0.508 | R23 | 0.376 | 0.065 | 0.062 | 0.858 |
| R3 | 0.470 | 0.069 | 0.073 | 0.659 | R24 | 0.468 | 0.112 | 0.088 | 0.725 |
| R4 | 0.303 | 0.085 | 0.117 | 0.140 | R25 | 0.324 | 0.175 | 0.087 | 0.617 |
| R5 | 0.276 | 0.275 | 0.061 | 0.799 | R26 | 0.225 | 0.266 | 0.064 | 0.729 |
| R6 | 0.353 | 0.212 | 0.067 | 0.943 | R27 | 0.281 | 0.159 | 0.077 | 0.544 |
| R7 | 0.427 | 0.099 | 0.065 | 0.796 | R28 | 0.757 | 0.014 | 0.186 | 0.213 |
| R8 | 0.333 | 0.140 | 0.167 | 0.136 | R29 | 0.479 | 0.107 | 0.091 | 0.879 |
| R9 | 0.239 | 0.127 | 0.060 | 0.442 | R30 | 0.192 | 0.198 | 0.068 | 0.299 |
| R10 | 0.450 | 0.057 | 0.069 | 0.490 | R31 | 0.489 | 0.063 | 0.098 | 0.659 |
| R11 | 0.262 | 0.036 | 0.050 | 0.180 | R32 | 0.410 | 0.064 | 0.089 | 0.381 |
| R12 | 0.177 | 0.591 | 0.070 | 0.776 | R33 | 0.296 | 0.317 | 0.062 | 0.995 |
| R13 | 0.296 | 0.047 | 0.106 | 0.096 | R34 | 0.406 | 0.062 | 0.179 | 0.093 |
| R14 | 0.588 | 0.003 | 0.338 | 0.003 | R35 | 0.765 | 0.007 | 0.050 | 0.561 |
| R15 | 0.230 | 0.138 | 0.050 | 0.471 | R36 | 0.365 | 0.053 | 0.123 | 0.129 |
| R16 | 0.263 | 0.028 | 0.050 | 0.126 | R37 | 0.502 | 0.038 | 0.050 | 0.490 |
| R17 | 0.362 | 0.014 | 0.069 | 0.114 | R38 | 0.532 | 0.015 | 0.295 | 0.017 |
| R18 | 0.452 | 0.013 | 0.050 | 0.344 | R39 | 0.630 | 0.018 | 0.092 | 0.368 |
| R19 | 0.336 | 0.201 | 0.066 | 1.356 | R40 | 0.485 | 0.046 | 0.103 | 0.406 |
| R20 | 0.336 | 0.091 | 0.120 | 0.224 | R41 | 0.478 | 0.099 | 0.086 | 0.704 |
| R21 | 0.593 | 0.106 | 0.153 | 0.552 | R42 | 0.294 | 0.100 | 0.067 | 0.391 |
| OF (s) | 30.099 | 13.017 | |||||||
| Ref. | Method | The Algorithm’s Parameters for 30-Bus Test System | Objective Function | ||||||
|---|---|---|---|---|---|---|---|---|---|
| TMSmin | TMSmax | PSmin | PSmax | PS Mode | CTI | NFE | |||
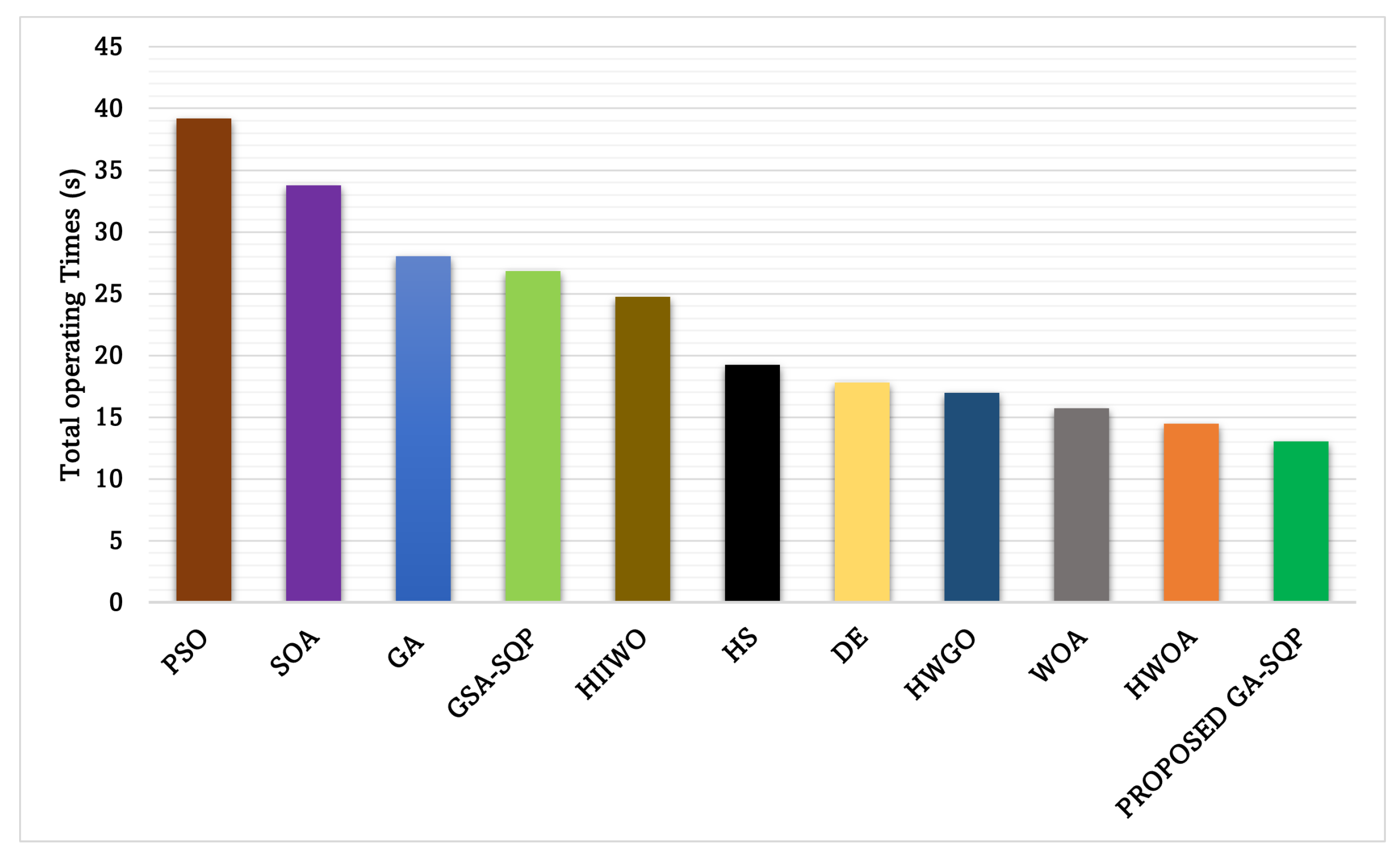
| [49] | PSO | 0.1 | 1.1 | continuous | 0.2 | 100 | 39.1834 | ||
| [49] | SOA | 0.1 | 1.1 | continuous | 0.2 | 100 | 33.7734 | ||
| [49] | GA | 0.1 | 1.1 | continuous | 0.2 | 100 | 28.0195 | ||
| [50] | GSA-SQP | 0.1 | 1.1 | 1.5 | 6 | continuous | 0.3 | 200 | 26.8258 |
| [51] | HIIWO | 0.1 | 1.1 | 1.5 | 6 | continuous | 0.3 | 200 | 24.759 |
| [49] | HS | 0.1 | 1.1 | continuous | 0.2 | 100 | 19.2133 | ||
| [49] | DE | 0.1 | 1.1 | continuous | 0.2 | 100 | 17.8122 | ||
| [17] | HWGO | 0.1 | 1.1 | 1.5 | 6 | continuous | 0.3 | 3489 | 16.96 |
| [44] | WOA | 0.1 | 1.2 | 1.5 | 2.5 | continuous | 0.3 | 320 | 15.7139 |
| [44] | HWOA | 0.1 | 1.2 | 1.5 | 2.5 | continuous | 0.3 | 250 | 14.4649 |
| Proposed GA-SQP | 0.05 | 1.1 | continuous | 0.2 | 300 | 13.017 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Bhadely, F.; İnan, A. Improving Directional Overcurrent Relay Coordination in Distribution Networks for Optimal Operation Using Hybrid Genetic Algorithm with Sequential Quadratic Programming. Energies 2023, 16, 7031. https://doi.org/10.3390/en16207031
Al-Bhadely F, İnan A. Improving Directional Overcurrent Relay Coordination in Distribution Networks for Optimal Operation Using Hybrid Genetic Algorithm with Sequential Quadratic Programming. Energies. 2023; 16(20):7031. https://doi.org/10.3390/en16207031
Chicago/Turabian StyleAl-Bhadely, Faraj, and Aslan İnan. 2023. "Improving Directional Overcurrent Relay Coordination in Distribution Networks for Optimal Operation Using Hybrid Genetic Algorithm with Sequential Quadratic Programming" Energies 16, no. 20: 7031. https://doi.org/10.3390/en16207031
APA StyleAl-Bhadely, F., & İnan, A. (2023). Improving Directional Overcurrent Relay Coordination in Distribution Networks for Optimal Operation Using Hybrid Genetic Algorithm with Sequential Quadratic Programming. Energies, 16(20), 7031. https://doi.org/10.3390/en16207031