
Research on Terrain Mobility of UGV with Hydrostatic Wheel Drive and Slip Control Systems

 ,
,  , , ,
, , ,  and
and
Abstract
:1. Introduction
2. Method
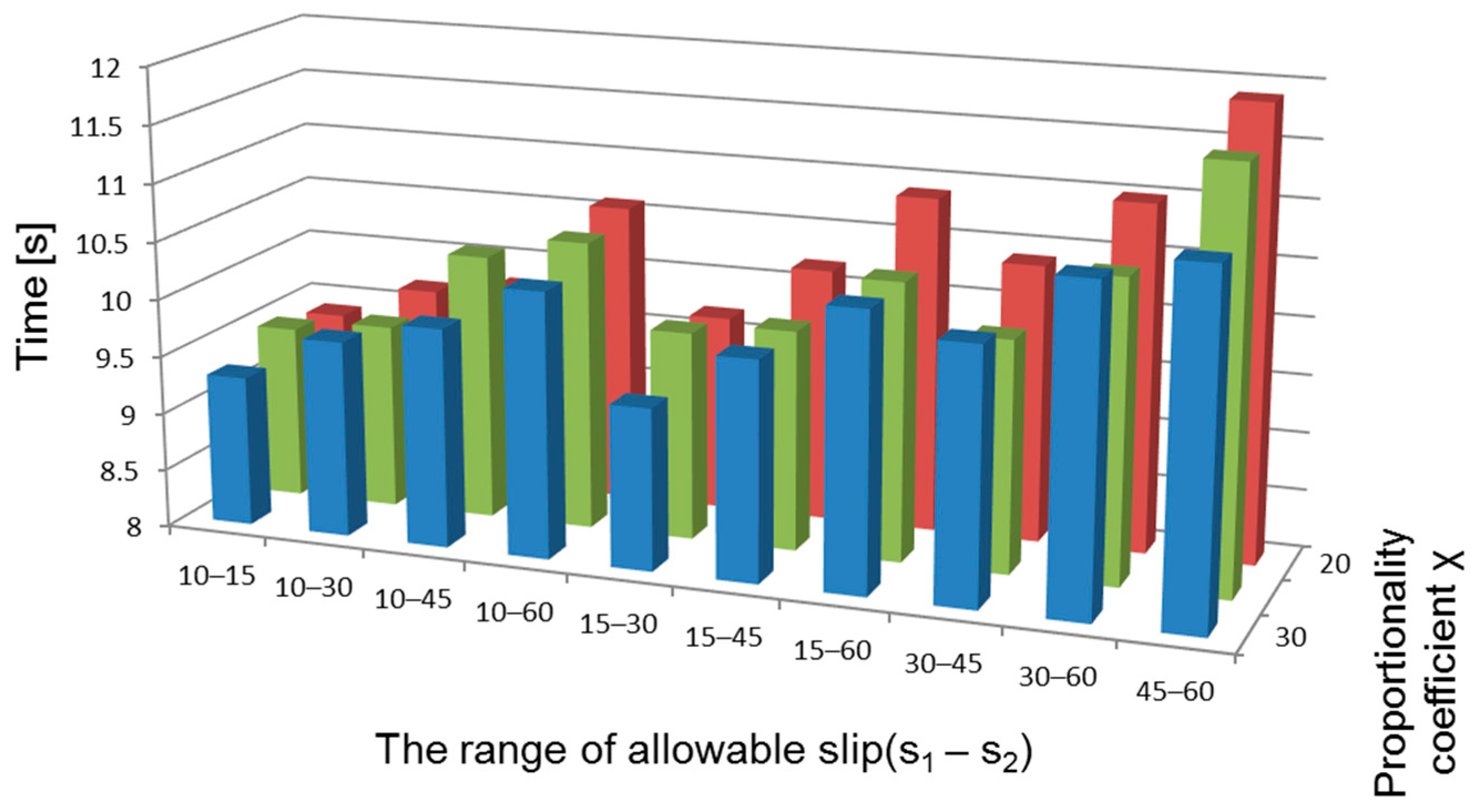
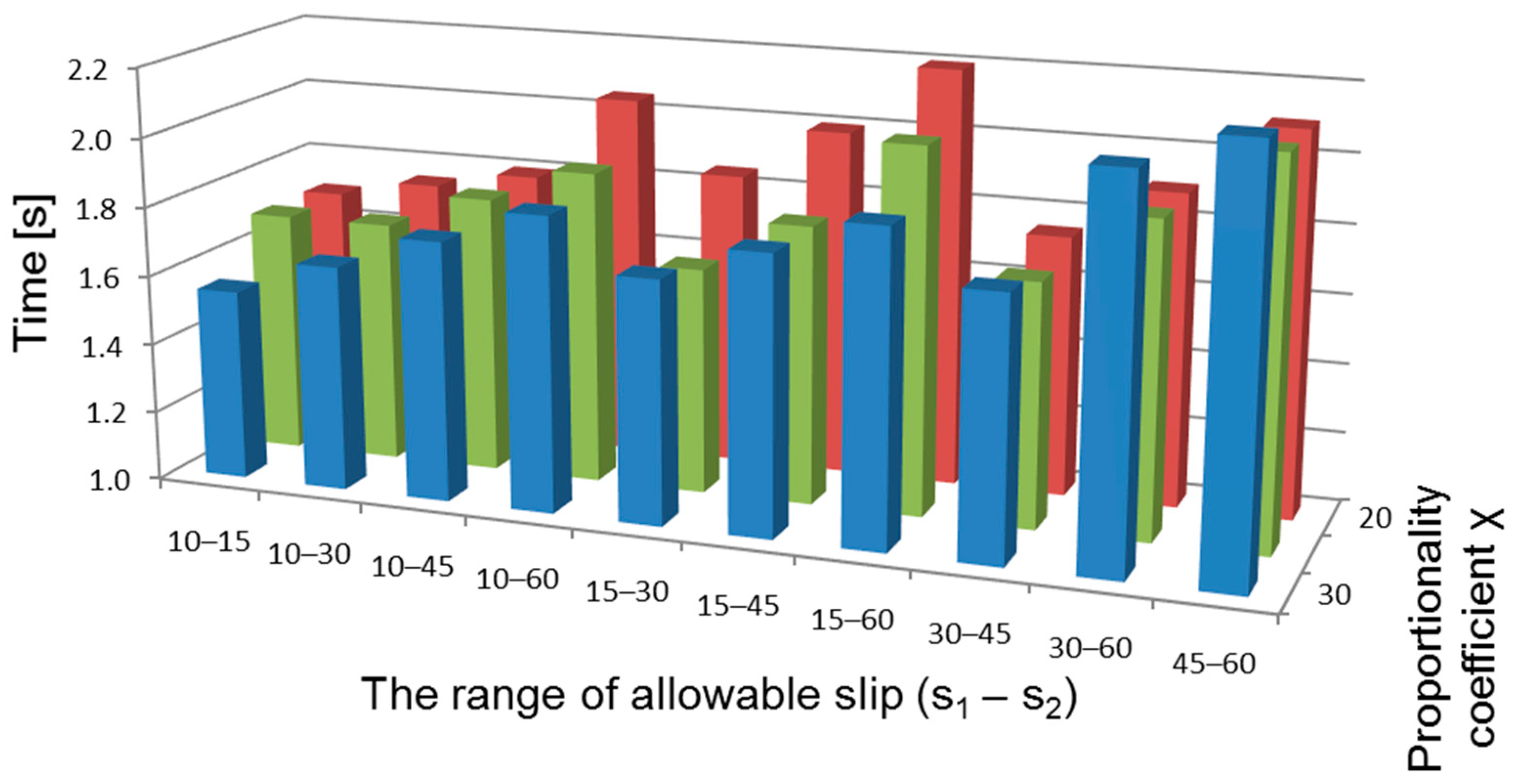
- − Time necessary to overcome the obstacle, td;
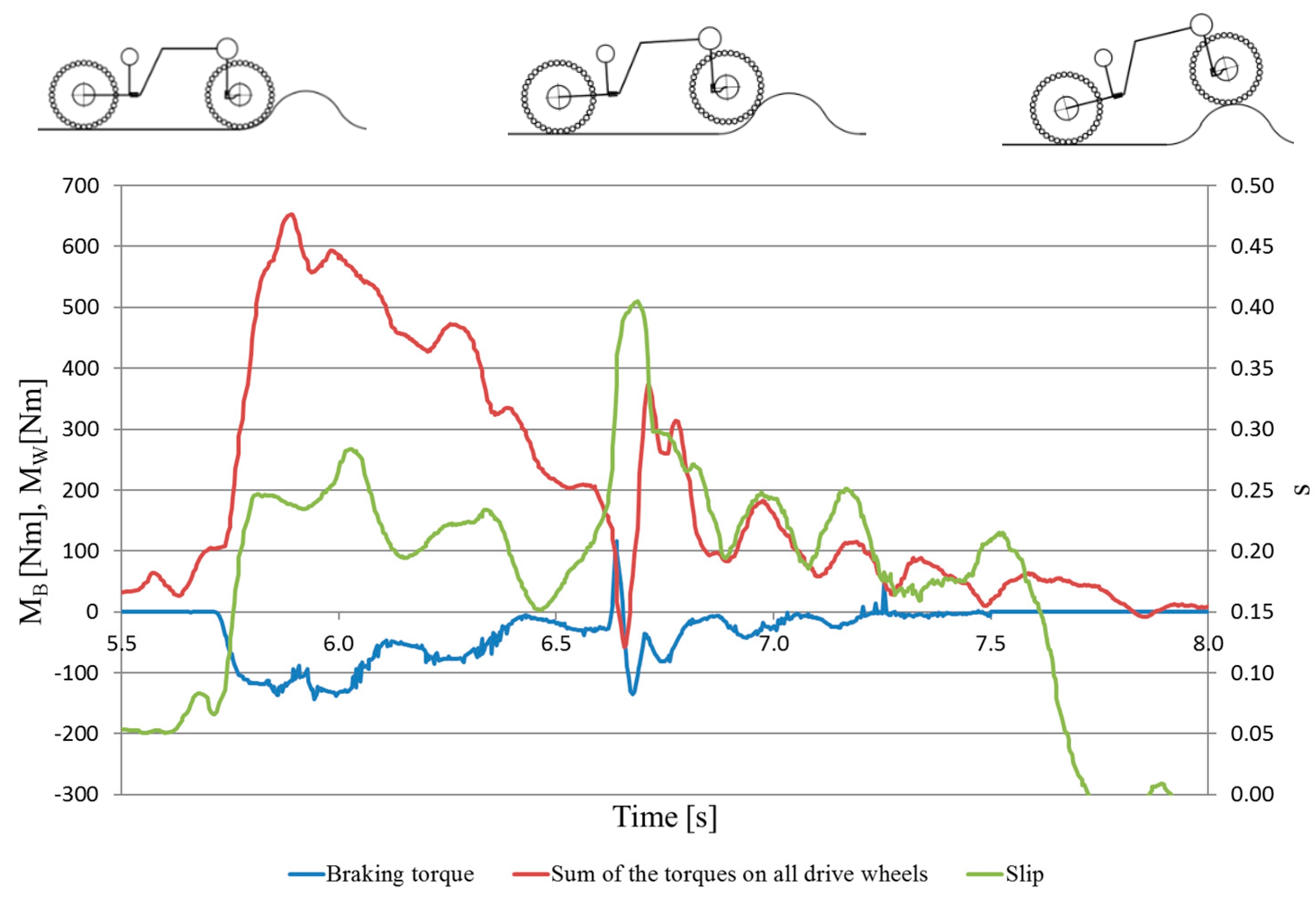
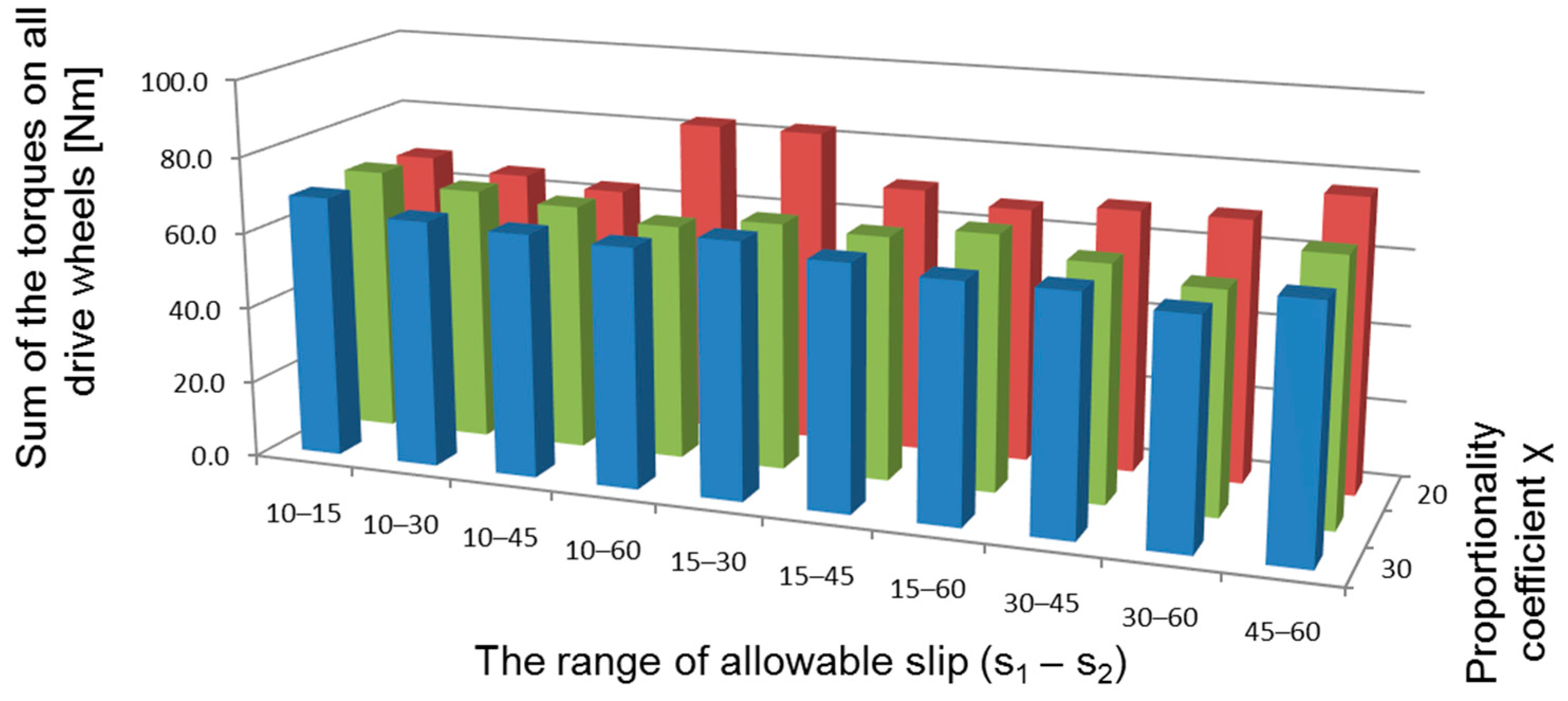
- − Maximum necessary drive torque on wheels MW;
- − Maximum braking torque MB;
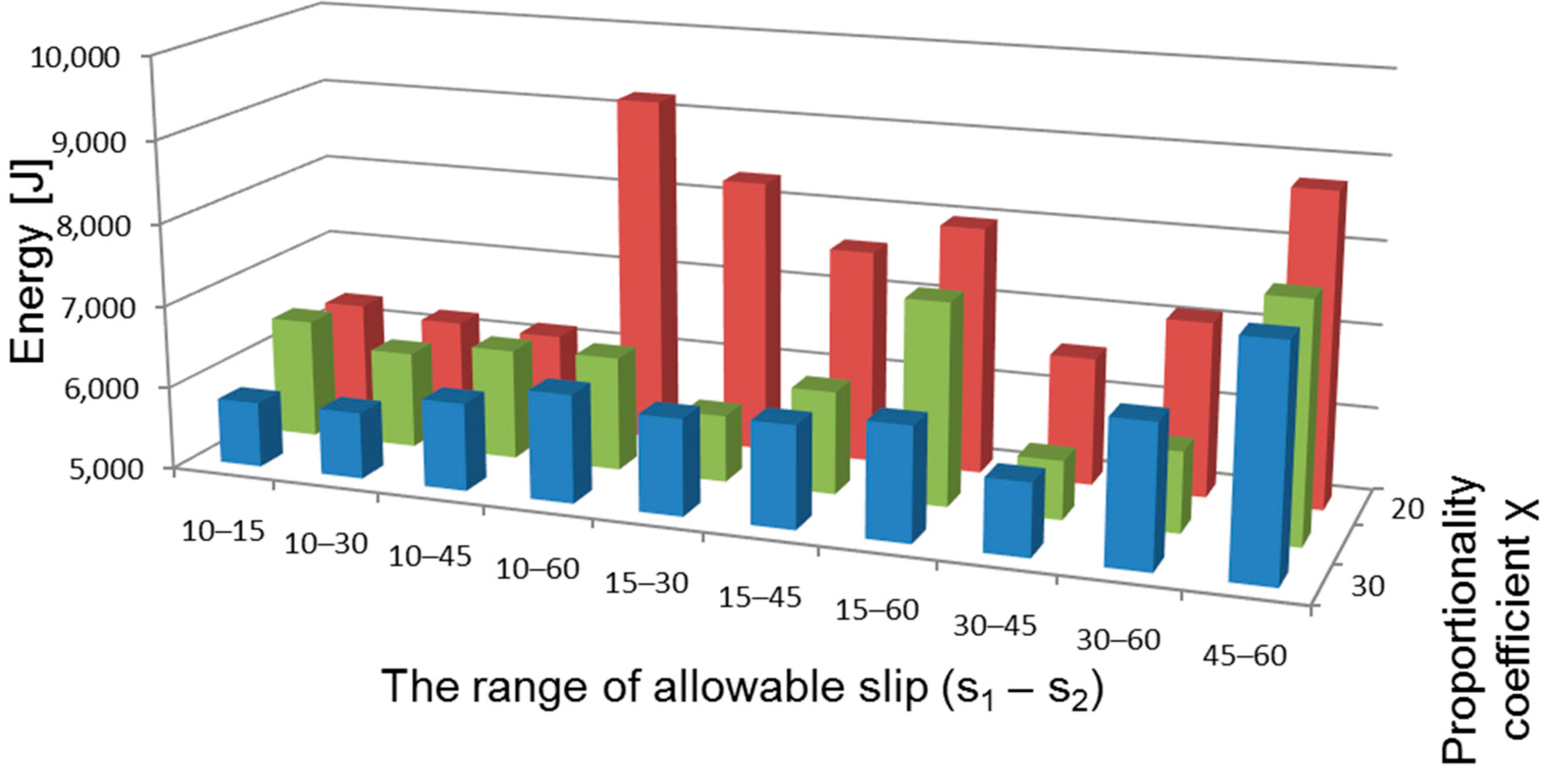
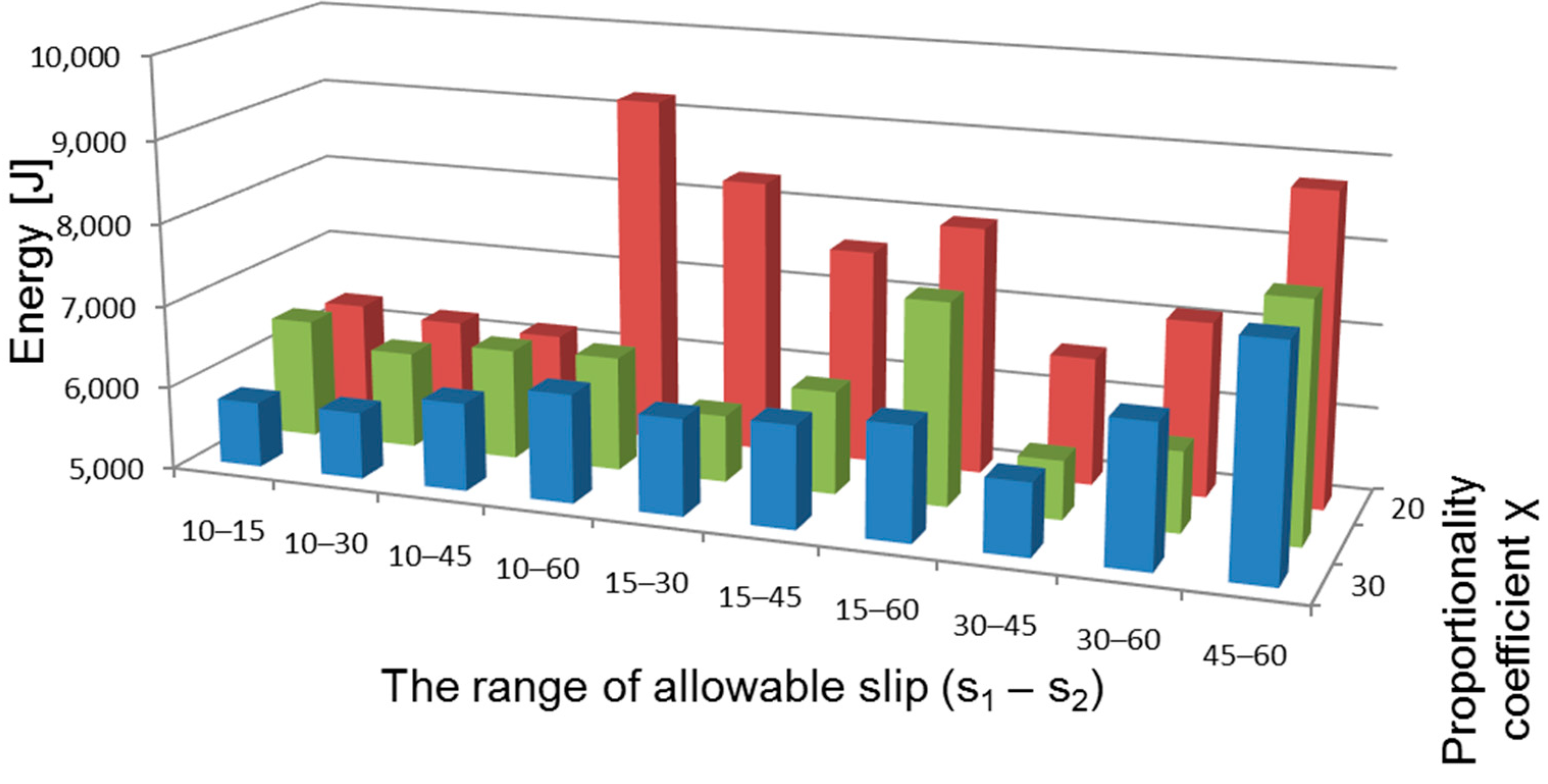
- − Energy on wheels necessary to overcome an obstacle EW.
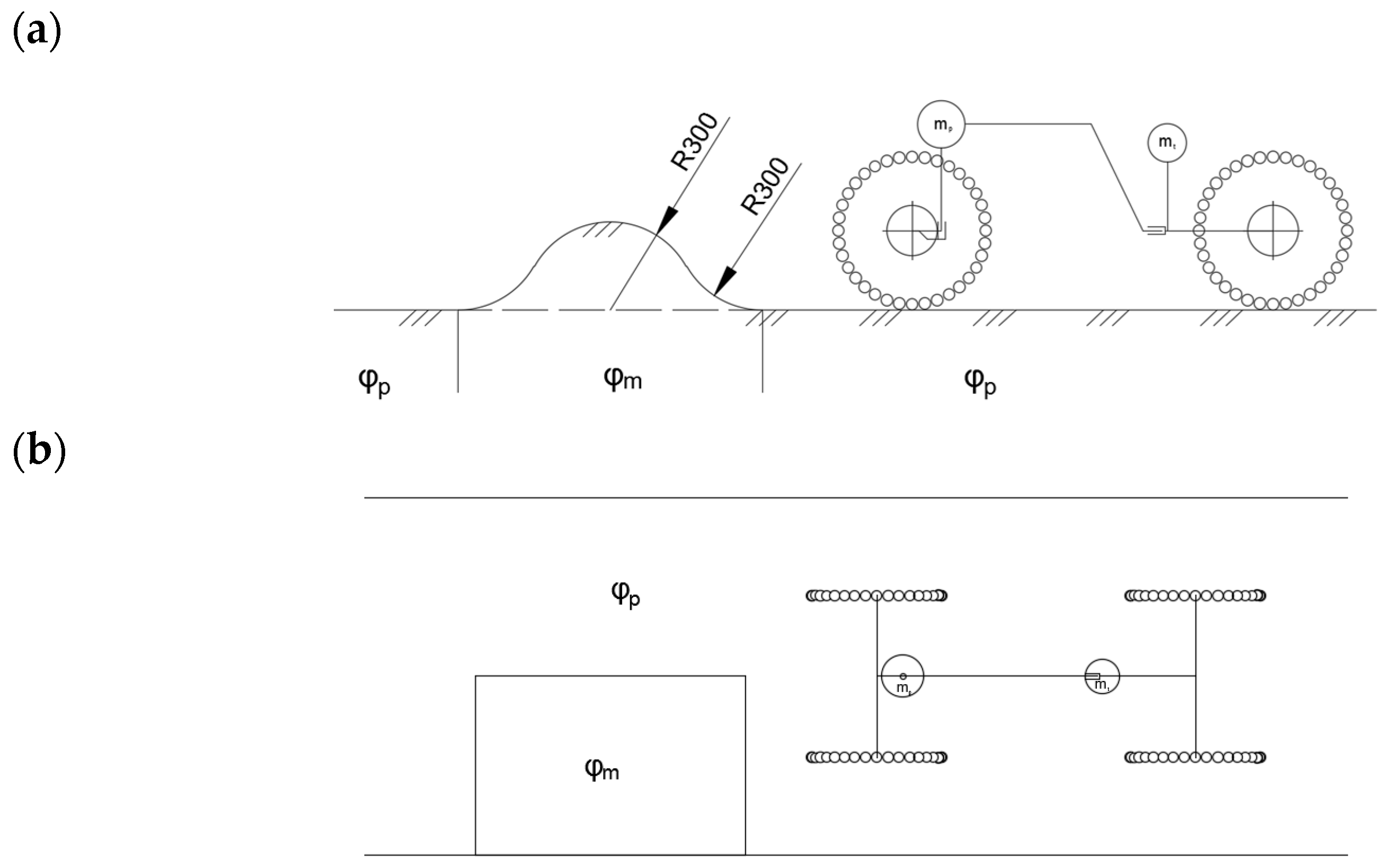
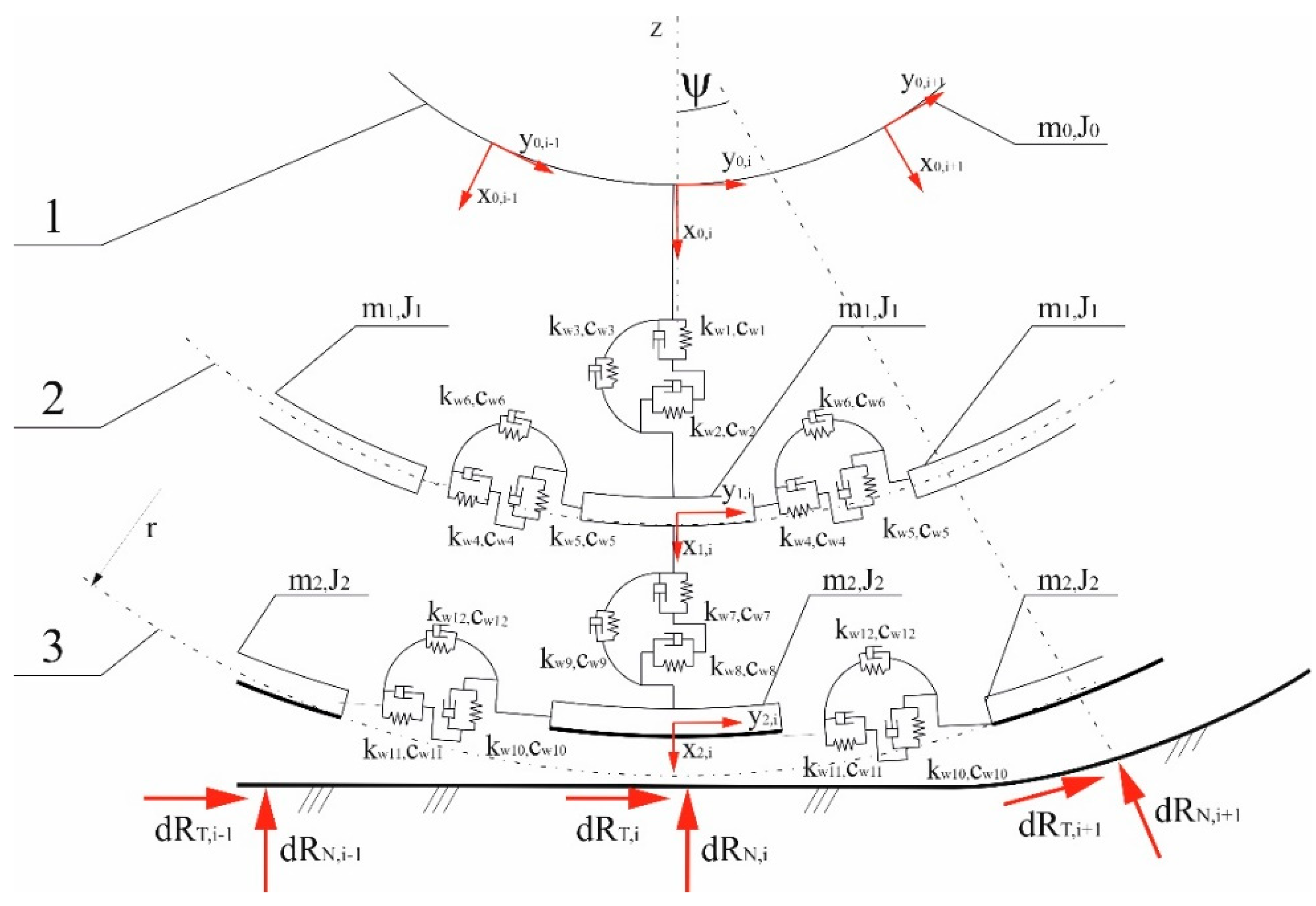
2.1. Light UGV Mechanical Structure Model
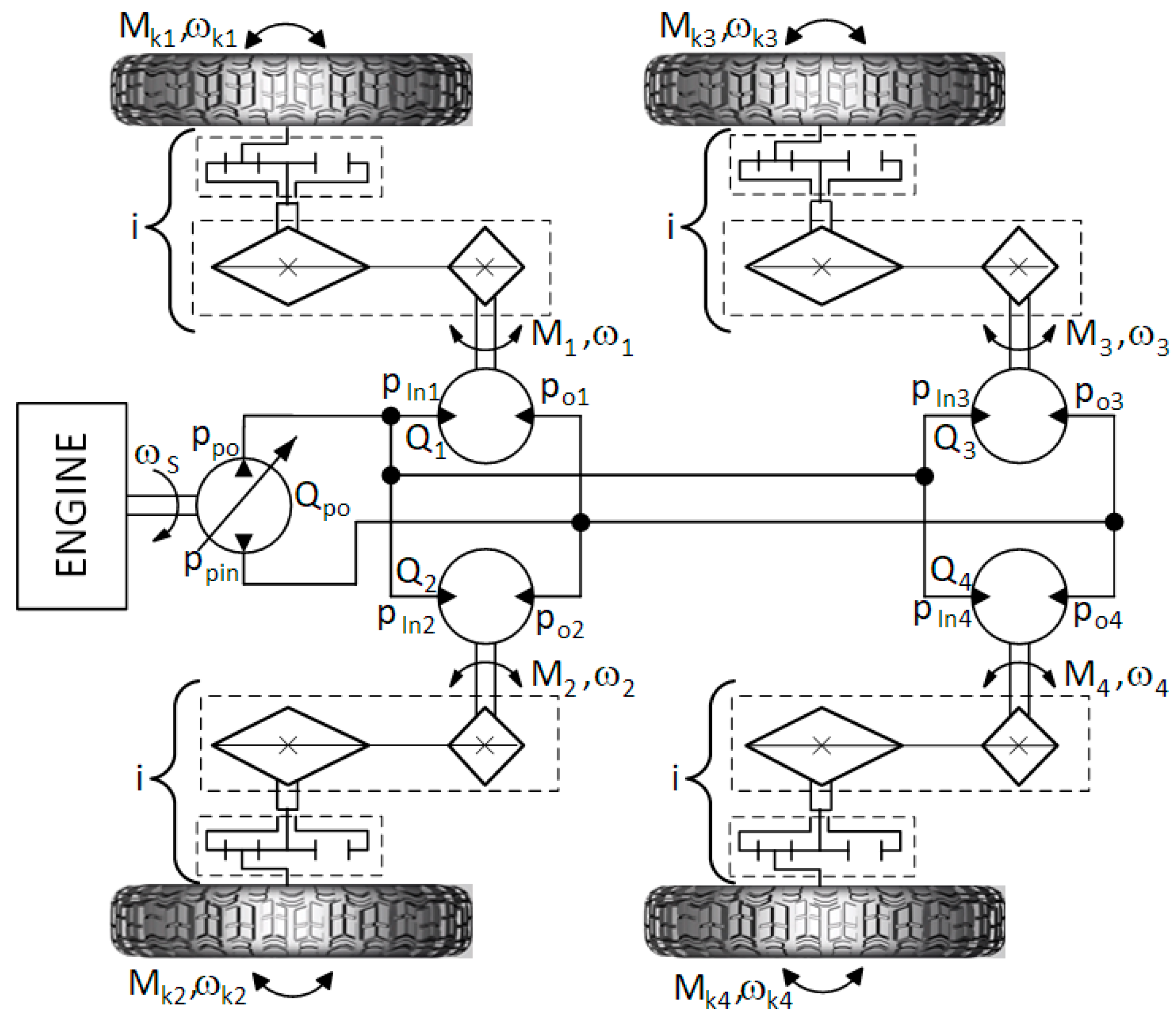
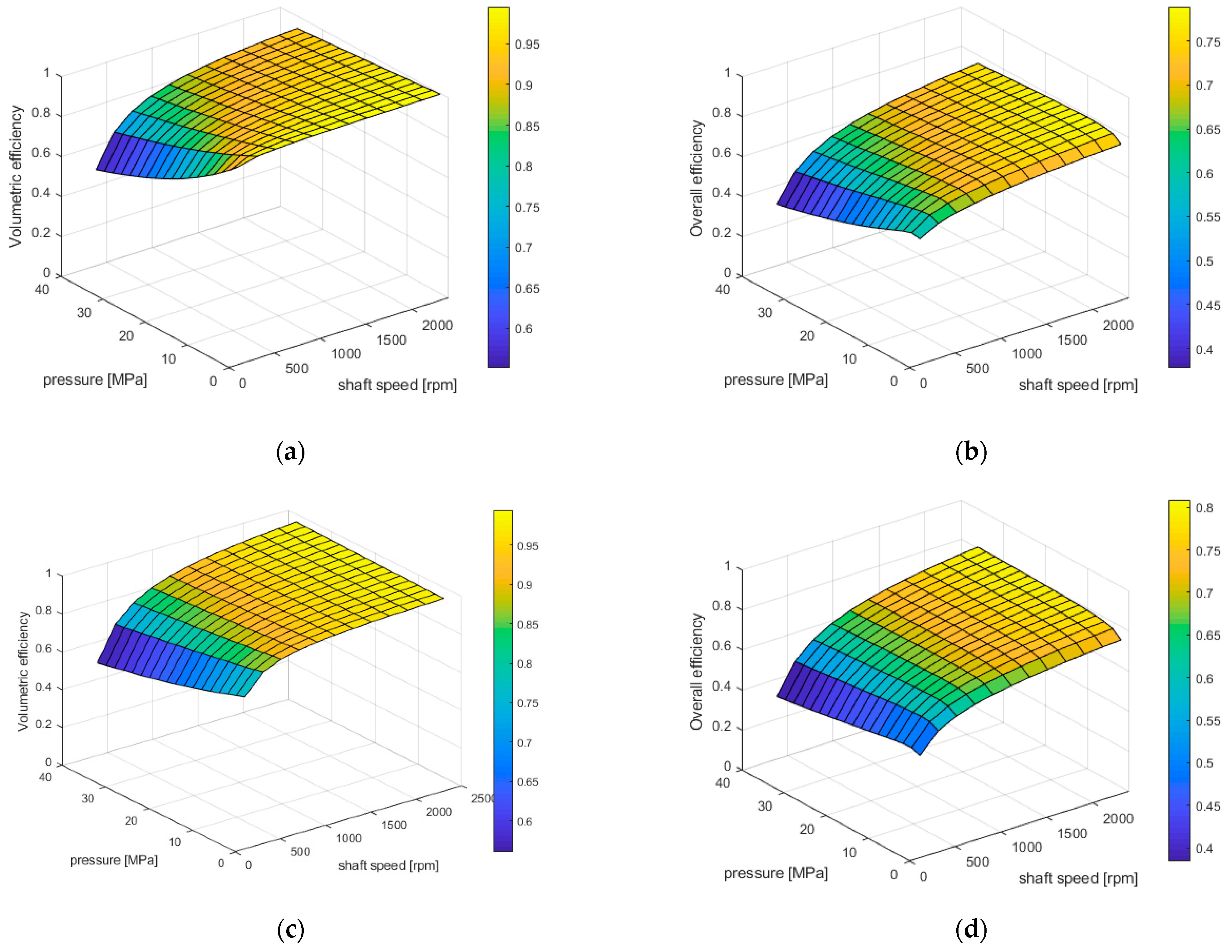
2.2. Light UGV Hydraulic Drivetrain Model
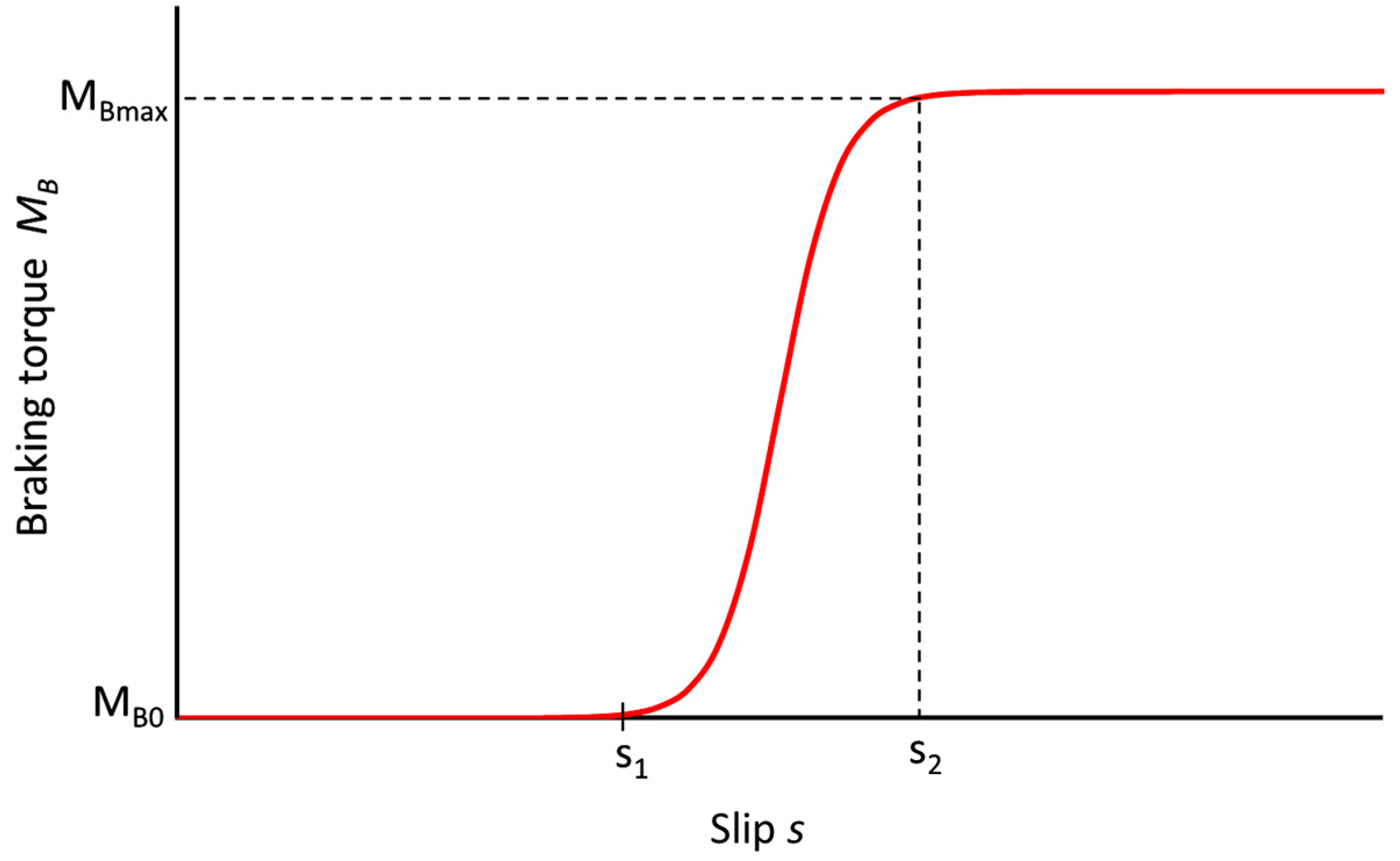
2.3. Slip Control System Model
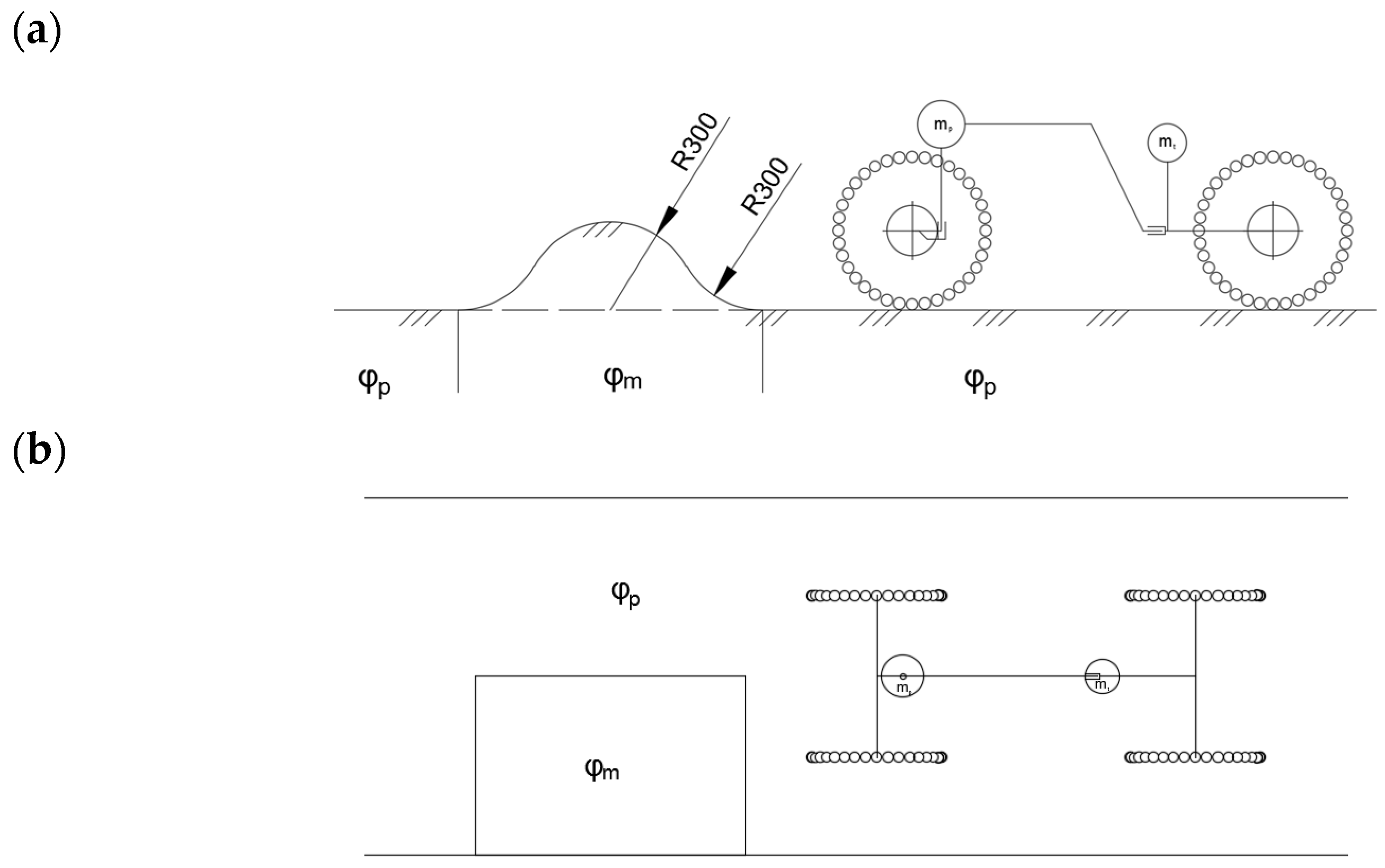
2.4. Analyzed Case Mobility of Light UGV
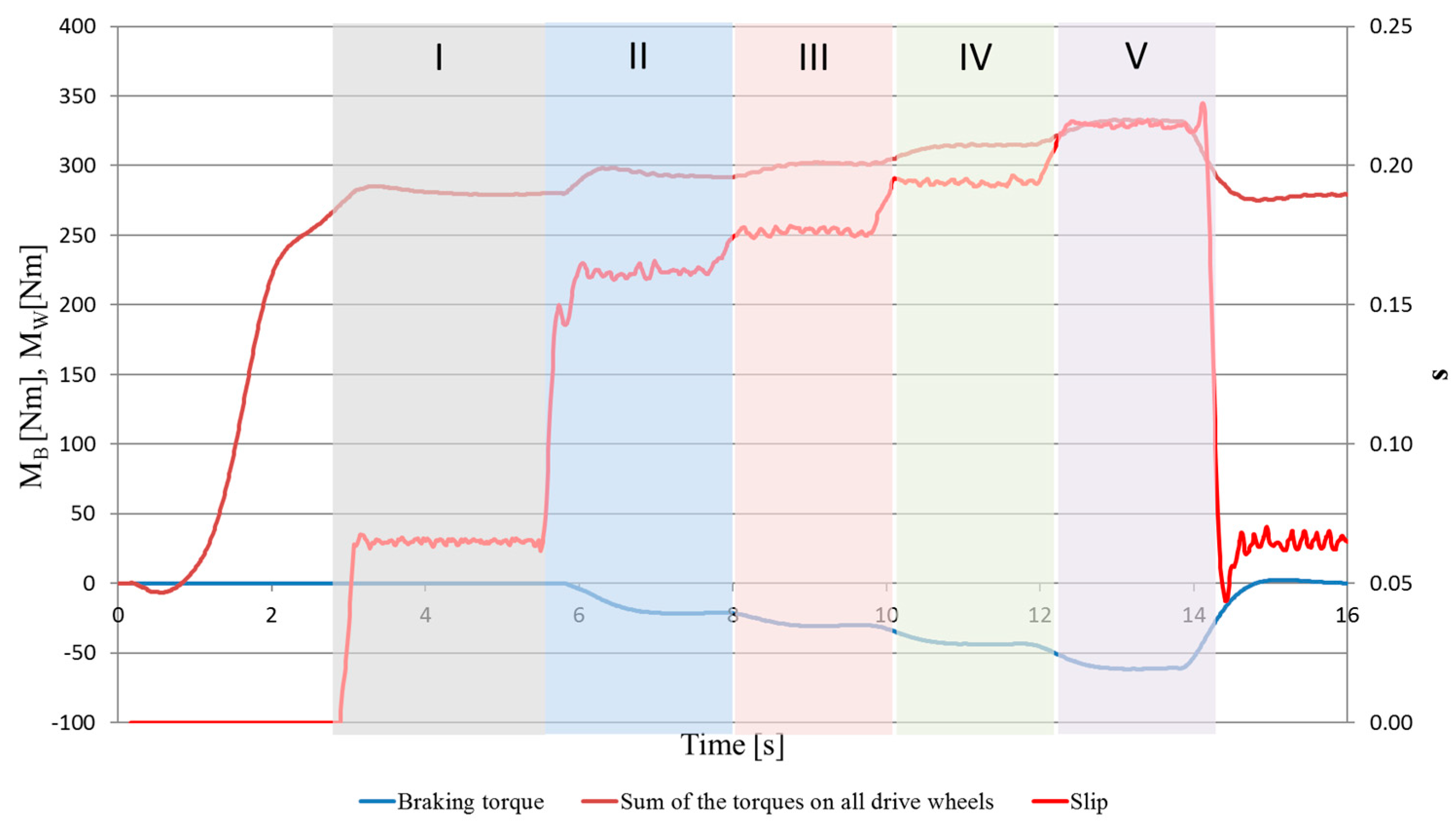
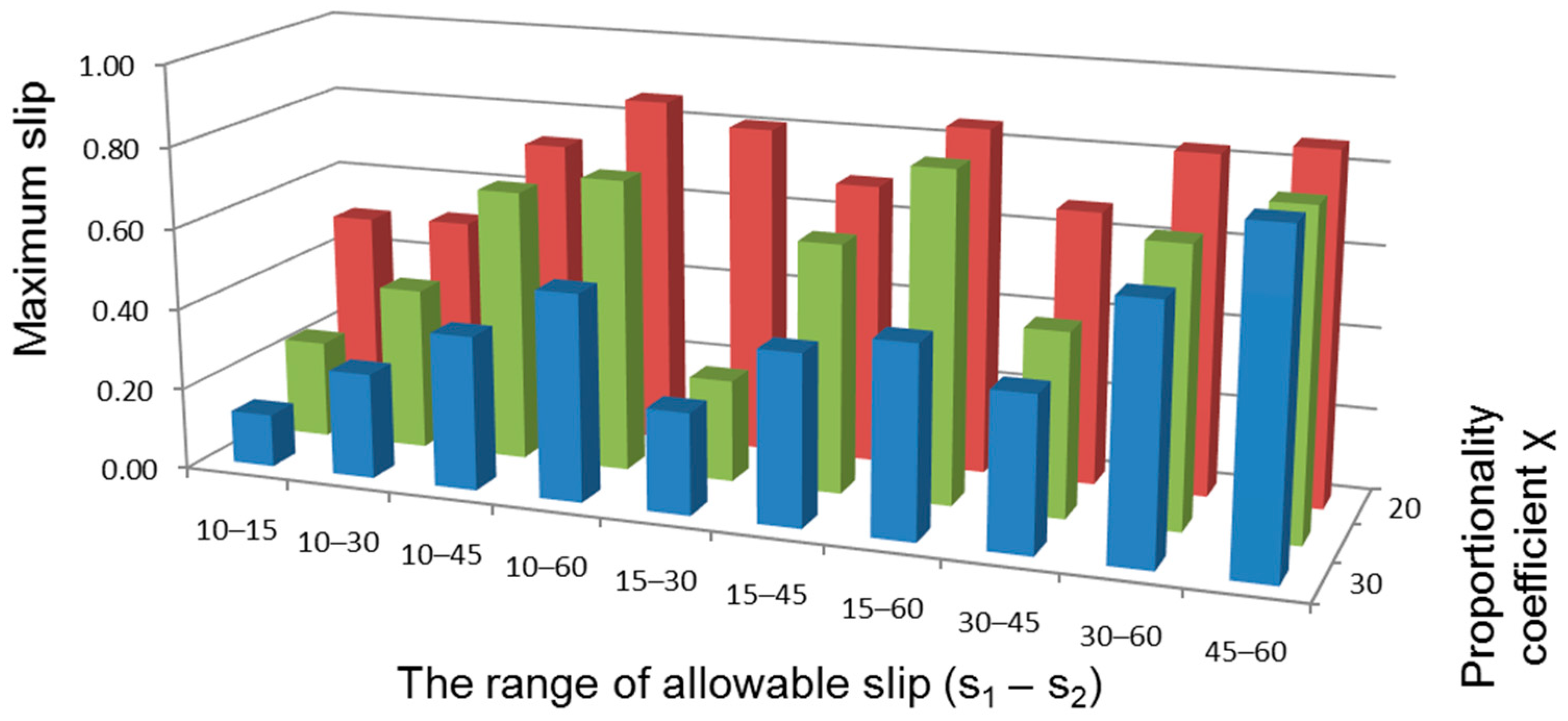
- Maximum braking torque MBmax in the i-th wheel;
- s1—the slip control system is activated;
- s2—the braking torque MBi reaches the maximum value MBmax.
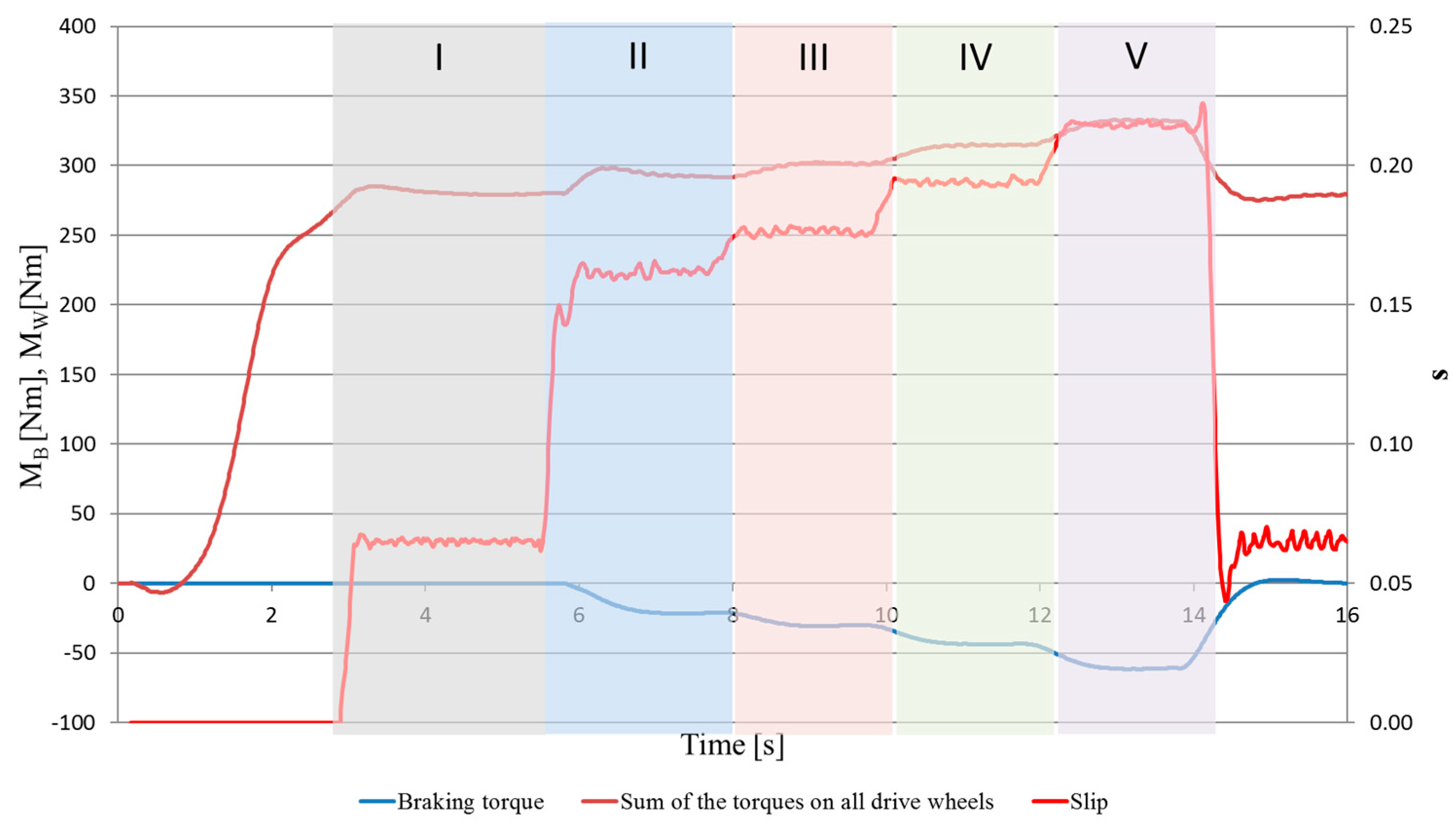
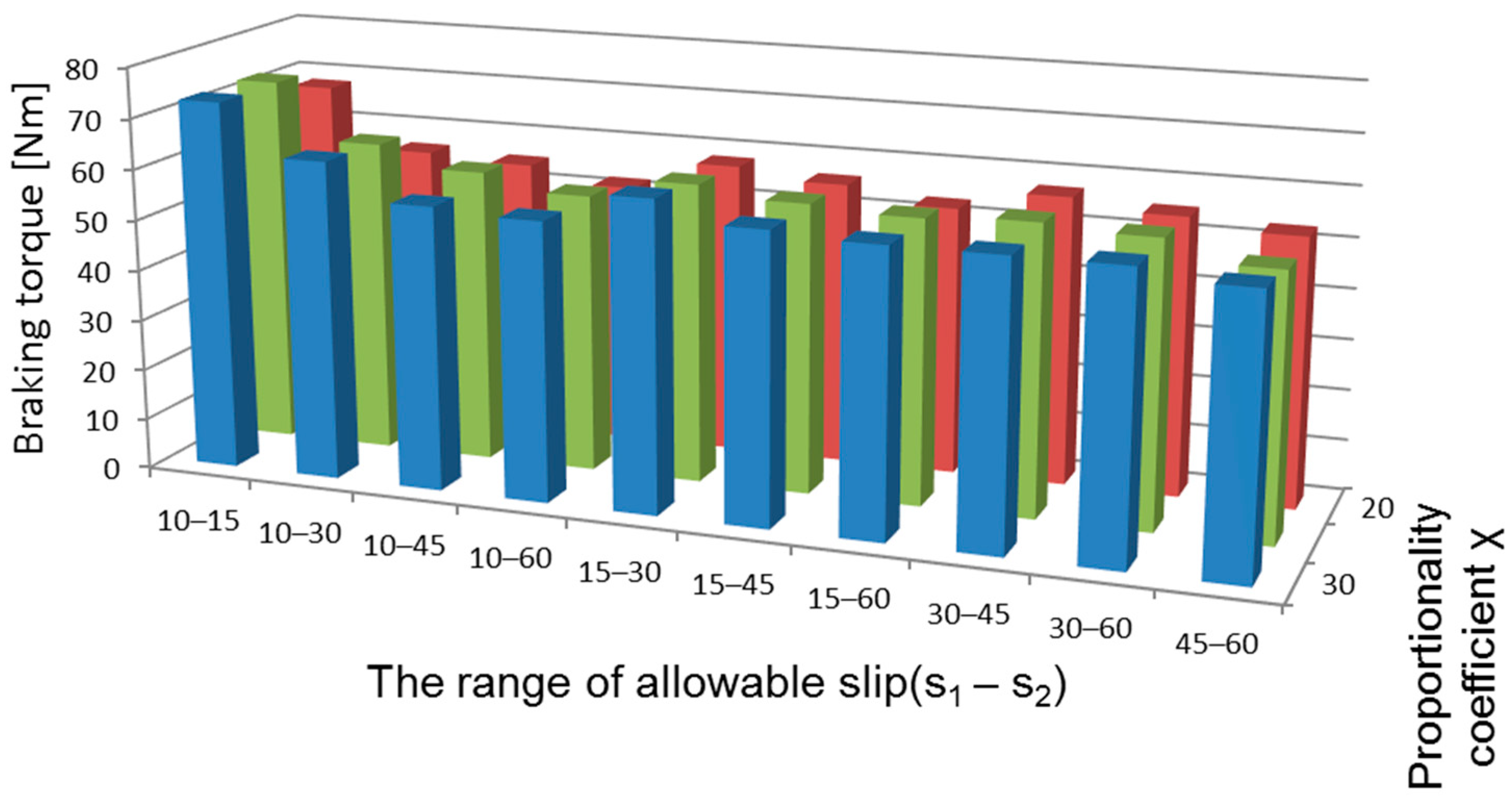
3. Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Massey, K.; Squad Mission Equipment Transport (SMET). Lessons Learned for Industry. In Proceedings of the Annotated Version of Briefing at NDIA Ground Robotics Capability Conference, HDT Expeditionary Systems, Olympia, WA, USA, 2 March 2016. [Google Scholar]
- Typiak, A.; Zienowicz, Z. Utilization of remote controlled vehicle with hydrostatic driving system. In Proceedings of the 25th International Symposium on Automation and Robotics in Construction ISARC—2008, Vilnius, Lithuania, 26–29 June 2008. [Google Scholar]
- Łopatka, M.J. Heavy Robots for C-IED Operations. In Proceedings of the 1st International Conference CNDGS’2018, Pabrade, Lithuania, 25–27 April 2018. [Google Scholar]
- Łopatka, M.J. UGV for Close Support Dismounted Operations—Current Possibility to Fulfil Military Demand. In Proceedings of the 2nd International Conference CNDGS’2020, Vilnius, Lithuania, 14–16 October 2020. [Google Scholar]
- Fukuoka, Y.; Oshino, K.; Ibrahim, A.N. Negotiating Uneven Terrain by a Simple Teleoperated Tracked Vehicle with Internally Movable Center of Gravity. Appl. Sci. 2022, 12, 525. [Google Scholar] [CrossRef]
- Typiak, R.; Rykała, L.; Typiak, A. Configuring a UWB Based Location System for a UGV Operating in a Follow-Me Scenario. Energies 2021, 14, 5517. [Google Scholar] [CrossRef]
- Nakamura, S.; Faragalli, M.; Mizukami, N.; Nakatani, I.; Kunii, Y.; Kubota, T. Wheeled robot with movable center of mass for traversing over rough terrain. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Diego, CA, USA, 29 October–2 November 2007; pp. 1228–1233. [Google Scholar]
- Douglas, W.G. UGV HISTORY 101: A Brief History of Unmanned Ground Vehicle (UGV) Development Efforts; RDT&E Division, Naval Command, Control and Ocean Surveillance Center: San Diego, CA, USA, 1995; Volume 13. [Google Scholar]
- László, V. Excepts from the history of unmanned ground vehicles development in the USA. Arms 2003, 2, 185–197. [Google Scholar]
- Sharma, G. Unmanned Combat Vehicles: Weapons for the Fourth Generation Warfare; Scholar Warrior: Washington, DC, USA, 2012; pp. 104–113. [Google Scholar]
- Väljaots, E. Energy Efficiency Evaluation Method for Mobile Robot Platform Design. Ph.D. Thesis, Department of Mechanical and Industrial Engineering, School of Engineering, Tallinn University of Technology, Tallinn, Estonia, 2017. [Google Scholar]
- Andreev, A.F.; Kabanau, V.I.; Vantsevich, V.V. Driveline Systems of Ground Vehicles: Theory and Design; CRC Press: Boca Raton, FL, USA, 2010; ISBN 9781439817278. [Google Scholar]
- Wong, J.Y. Theory of Ground Vehicles; John Wiley & Sons: Hoboken, NJ, USA, 2008; ISBN 978-0-470-17038-0. [Google Scholar]
- Dudzinski, P.; Cholodowski, J. A method for experimental identification of bending resistance of reinforced rubber belts. In Computational Technologies in Engineering (TKI’2018): Proceedings of the 15th Conference on Computational Technologies in Engineering, Jora Wielka, Poland, 16–19 October 2018. [Google Scholar]
- Ketting, M.; Dudzinski, P.; Cholodowski, J. Experimental tests on rolling resistance of road wheels in rubber tracked undercarriages. In Proceedings of the 24th International Conference Engineering Mechanics, Svratka, Czech Republic, 14–17 May 2018. [Google Scholar] [CrossRef]
- Racz, S.G.; Crenganiș, M.; Breaz, R.-E.; Maroșan, A.; Bârsan, A.; Gîrjob, C.-E.; Biriș, C.-M.; Tera, M. Mobile Robots—AHP-Based Actuation Solution Selection and Comparison between Mecanum Wheel Drive and Differential Drive with Regard to Dynamic Loads. Machines 2022, 10, 886. [Google Scholar] [CrossRef]
- Giesbrecht, J.; Mackay, D.; Collier, J.; Verret, S. Path Tracking for Unmanned Ground Vehicle Navigation; Technical Memorandum DRDC Suffield TM 2005-224; Defense Technical Information Center: For Belvoir, VA, USA, 2005. [Google Scholar]
- Weiss, J.A.; Simmons, R.K. TMAP—A Versatile Mobile Robot. In Proceedings of the SPIE Mobile Robots III, Cambridge, MA, USA, 10–11 November 1988; Volume 1007, pp. 298–308. [Google Scholar]
- Martelli, M.; Zarotti, L.G. Hydrostatic Transmission with a Traction Control. In Proceedings of the 22nd International Symposium on Automation and Robotics in Construction ISARC 2005, Ferrara, Italy, 11–14 September 2005. [Google Scholar]
- Singh, R.B.; Kumar, R.; Das, J. Hydrostatic Transmission Systems in Heavy Machinery: Overview Ravi. Int. J. Mech. Prod. Eng. 2013, 1, 47–51. [Google Scholar]
- Fue, K.; Porter, W.; Barnes, E.; Li, C.; Rains, G. Autonomous Navigation of a Center-Articulated and Hydrostatic Transmission Rover Using a Modified Pure Pursuit Algorithm in a Cotton Field. Sensors 2020, 20, 4412. [Google Scholar] [CrossRef] [PubMed]
- Broten, G.; Monckton, S.; Giesbrecht, J.; Collier, J. Software Systems for Robotics: An Applied Research Perspective. Int. J. Adv. Robot. Syst. 2006, 3, 11–16. [Google Scholar] [CrossRef]
- Beliakov, V.V.; Zeziulin, D.V.; Makarov, V.S.; Kurkin, A.A. Development of a Multi-Axle All-Terrain Vehicle with a Hydrostatic Transmisson. Izv. Vyss. Uchebnykh Zaved. 2016, 10, 39–48. [Google Scholar]
- Kumar, M.; Pandey, K.P.; Mehta, C.R. Development and evaluation of automatic slip sensing device for Indoor Tyre Test Carriage. Pantnagar J. Res. 2020, 18, 165–169. [Google Scholar]
- Zhang, N.; Wang, J.; Li, Z.; Li, S.; Ding, H. Multi-Agent-Based Coordinated Control of ABS and AFS for Distributed Drive Electric Vehicles. Energies 2022, 15, 1919. [Google Scholar] [CrossRef]
- Chen, L.; Li, Z.; Yang, J.; Song, Y. Lateral Stability Control of Four-Wheel-Drive Electric Vehicle Based on Coordinated Control of Torque Distribution and ESP Differential Braking. Actuators 2021, 10, 135. [Google Scholar] [CrossRef]
- Tyugin, D.Y.; Belyakov, V.V.; Kurkin, A.A.; Zeziulin, D.V.; Filatov, V.I. Development of the Ground Mobile Robot with Adaptive Agility Systems. Procedia Comput. Sci. 2019, 150, 287–293. [Google Scholar] [CrossRef]
- Khaled, S. Speed Control of Autonomous Amphibious Vehicles. Ph.D. Thesis, Naturwissenschaftlich-Technischen Fakultät der Universität Siegen, Siegen, Germany, 2017. [Google Scholar]
- Safonov, B.A.; Travnikov, A.N. Unmanned all-terrain cargo and passenger transportation system for operation conditions when automobile roads are unavailable. J. Phys. Conf. Ser. 2019, 1177, 012043. [Google Scholar] [CrossRef]
- Alireza, M.; Amir, H.D.M.; Saleh, M. Comparison of adaptive fuzzy sliding-mode pulse width modulation control with common model-based nonlinear controllers for slip control in antilock braking systems. J. Dyn. Sys. Meas. Control 2017, 140, 011014. [Google Scholar]
- Wang, J.-C.; He, R. Hydraulic anti-lock braking control strategy of a vehicle based on a modified optimal sliding mode control method. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 233, 3185–3198. [Google Scholar] [CrossRef]
- Hossein, M. Robust predictive control of wheel slip in antilock braking systems based on radial basis function neural network. Appl. Soft Comput. 2018, 70, 318–329. [Google Scholar]
- Aksjonov, A.; Vodovozov, V.; Augsburg, K.; Petlenkov, E. Design of regenerative anti-lock braking system controller for 4 in-wheel motor drive electric vehicle with road surface estimation. Int. J. Automot. Technol. 2018, 19, 727–742. [Google Scholar] [CrossRef]
- Yang, Y.; He, Y.; Yang, Z.; Fu, C.; Cong, Z. Torque Coordination Control of an Electro-Hydraulic Composite Brake System During Mode Switching Based on Braking Intention. Energies 2020, 13, 2031. [Google Scholar] [CrossRef]
- Nevala, K.; Penttinen, J.; Saavalainen, P. Developing of the Anti-Slip Control of Hydrostatic Power Transmission and Optimisation of the Power of Diesel Engine. In Proceedings of the ACM’98 Coimbra 1998, 5th International Workshop on Advanced Motion Control, Coimbra, Portugal, 29 June–1 July 1998. [Google Scholar]
- Song, D. Hardware-in-the-loop validation of speed synchronization controller for a heavy vehicle with Hydraulics AddiDrive System. Adv. Mech. Eng. 2018, 10, 168781401876716. [Google Scholar] [CrossRef]
- Przybysz, M.; Łopatka, M.J.; Rubiec, A.; Małek, M. Influence of Flow Divider on Overall Efficiency of a Hydrostatic Drivetrain of a Skid-Steer All-Wheel Drive Multiple-Axle Vehicle. Energies 2021, 14, 3560. [Google Scholar] [CrossRef]
- Przybysz, M.; Łopatka, M.J.; Rubiec, A.; Krogul, P.; Cieślik, K.; Małek, M. Influence of Hydraulic Drivetrain Configuration on Kinematic Discrepancy and Energy Consumption during Obstacle Overcoming in a 6 × 6 All-Wheel Hydraulic Drive Vehicle. Energies 2022, 15, 6397. [Google Scholar] [CrossRef]
- Shukhman, S.B.; Soloviev, V.I.; Malkin, M.A. Design of automatic control of multi-axle motor vehicles with a hydrostatic wheel drive. Int. J. Veh. Auton. Syst. 2011, 9, 145–163. [Google Scholar] [CrossRef]
- Havrylenko, O.; Kulinich, S. Analyzing an error in the synchronization of hydraulic motor speed under transient operating conditions. East. Eur. J. Enterp. Technol. 2019, 4, 30–37. [Google Scholar] [CrossRef]
- Belyaev, A.; Manyanin, S.; Tumasov, A.; Makarov, V.; Belyakov, V. Development of 8 × 8 All-terrain Vehicle with Individual Wheel Drive. In Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS), Heraklion, Greece, 3–5 May 2019; pp. 556–561. [Google Scholar]
- Jaskółowski, M.; Krogul, P.; Łopatka, M.J.; Muszyński, T.; Przybysz, M. Simulation research on terrain mobility of wheeled UGV for dismounted operation support. In Proceedings of the 13th European Conference of the International Society for Terrain Vehicle Systems, Rome, Italy, 21–23 October 2015. [Google Scholar]
- Konopka, S.; Lopatka, M.J.; Przybysz, M. Kinematic Discrepancy of Hydrostatic Drive of Unmanned Ground Vehicle. Arch. Mech. Eng. 2015, 62, 413–427. [Google Scholar] [CrossRef]
- Łopatka, M.J.; Przybysz, M.; Rubiec, A. Laboratory investigation of kinematic discrepancy compensation ability in multi—Axial all—Wheel drive teleoperated Unmanned Ground Vehicles with hydrostatic drivetrain. In Proceedings of the Forum on Innovative Technologies and Management for Sustainability ITMS, Ponavezys, Lithuania, 26–27 April 2018. [Google Scholar]
- Comellas, M.; Pijuan, J.; Nogués, M.; Roca, J. Efficiency analysis of a multiple axle vehicle with hydrostatic transmission overcoming obstacles, Vehicle System Dynamics. Int. J. Veh. Mech. Mobil. 2018, 56, 55–77. [Google Scholar]
- Patrosz, P. Influence of Properties of Hydraulic Fluid on Pressure Peaks in Axial Piston Pumps’ Chambers. Energies 2021, 14, 3764. [Google Scholar] [CrossRef]
- Lin, Y.; Lin, T.; Li, Z.; Ren, H.; Chen, Q.; Chen, J. Throttling Loss Energy-Regeneration System Based on Pressure Difference Pump Control for Electric Forklifts. Processes 2023, 11, 2459. [Google Scholar] [CrossRef]
- Zhang, J.; Jiang, J.-H.; Li, Y.-J. Flow characteristics of different cone valves. J. Jilin Univ. Eng. Technol. Ed. 2016, 46, 1900–1905. [Google Scholar]
- Li, J.; Han, Y.; Li, S. Flywheel-Based Boom Energy Recovery System for Hydraulic Excavators with Load Sensing System. Actuators 2021, 10, 126. [Google Scholar] [CrossRef]
- Fang, D.; Yang, J.; Shang, J.; Wang, Z.; Feng, Y. A Novel Energy-Efficient Wobble Plate Hydraulic Joint for Mobile Robotic Manipulators. Energies 2018, 11, 2915. [Google Scholar] [CrossRef]
- Khiyavi, O.A.; Seo, J.; Lin, X. Energy Saving in an Autonomous Excavator via Parallel Actuators Design and PSO-Based Excavation Path Generation. Eng. Proc. 2022, 24, 5. [Google Scholar] [CrossRef]
- Nurmi, J.; Mattila, J. Global Energy-Optimal Redundancy Resolution of Hydraulic Manipulators: Experimental Results for a Forestry Manipulator. Energies 2017, 10, 647. [Google Scholar] [CrossRef]
- Zheng, S.; Ding, R.; Zhang, J.; Xu, B. Global energy efficiency improvement of redundant hydraulic manipulator with dynamic programming. Energy Convers. Manag. 2021, 230, 113762. [Google Scholar] [CrossRef]
- Fu, Y.F.; Hu, X.H.; Wang, W.R.; Ge, Z. Simulation and Experimental Study of a New Electromechanical Brake with Automatic Wear Adjustment Function. Int. J. Automot. Technol. 2020, 21, 227–238. [Google Scholar] [CrossRef]
- Chen, Q.; Shao, H.; Liu, Y.; Xiao, Y.; Wang, N.; Shu, Q. Hydraulic-pressure-following control of an electronic hydraulic brake system based on a fuzzy proportional and integral controller. Eng. Appl. Comput. Fluid Mech. 2020, 14, 1228–1236. [Google Scholar] [CrossRef]
- Typiak, A.; Rykała, Ł. Research of an omnidirectional mecanum-wheeled platform with a fuzzy logic controller. J. KONES Powertrain Transp. 2018, 25, 423–432. [Google Scholar]
- Hussain, I.; Patoli, A.A.; Kazi, K. Fuzzy Logic Based Effective Anti-Lock Braking System Adaptive to Road Conditions. In Proceedings of the First International Conference on Modern Communication & Computing Technologies (MCCT’14), Nawabshah, Pakistan, 26–28 February 2014. [Google Scholar]
- Panda, S.; Sahu, B.K.; Mohanty, P.K. Design and performance analysis of PID controller for an automatic voltage regulator system using simplified particle swarm optimization. J. Frankl. Inst. 2012, 349, 2609–2625. [Google Scholar] [CrossRef]
- Garrosa, M.; Olmeda, E.; Díaz, V.; Mendoza-Petit, M.F. Design of an Estimator Using the Artificial Neural Network Technique to Characterise the Braking of a Motor Vehicle. Sensors 2022, 22, 1644. [Google Scholar] [CrossRef]
- Hwang, M.H.; Lee, G.S.; Kim, E.; Kim, H.W.; Yoon, S.; Talluri, T.; Cha, H.R. Regenerative Braking Control Strategy Based on AI Algorithm to Improve Driving Comfort of Autonomous Vehicles. Appl. Sci. 2023, 13, 946. [Google Scholar] [CrossRef]
- Ramesh, G.; Garza, P.; Perinpanayagam, S. Digital Simulation and Identification of Faults with Neural Network Reasoners in Brushed Actuators Employed in an E-Brake System. Appl. Sci. 2021, 11, 9171. [Google Scholar] [CrossRef]
- Vodovozov, V.; Aksjonov, A.; Petlenkov, E.; Raud, Z. Neural Network-Based Model Reference Control of Braking Electric Vehicles. Energies 2021, 14, 2373. [Google Scholar] [CrossRef]
- Heusser, K.; Heusser, R.; Jordan, J.; Urechie, V.; Diedrich, A.; Tank, J. Baroreflex Curve Fitting Using a WYSIWYG Boltzmann Sigmoidal Equation. Front. Neurosci. 2021, 15, 697582. [Google Scholar] [CrossRef] [PubMed]
- Sanjeevannavar, M.B.; Banapurmath, N.R.; Kumar, V.D.; Sajjan, A.M.; Badruddin, I.A.; Vadlamudi, C.; Krishnappa, S.; Kamangar, S.; Baig, R.U.; Khan, T.M.Y. Machine Learning Prediction and Optimization of Performance and Emissions Characteristics of IC Engine. Sustainability 2023, 15, 13825. [Google Scholar] [CrossRef]
- Zhang, R.; Xu, Z.; Yang, Y.; Zhu, P. Uncertainty-Estimation-Based Prescribed Performance Pressure Control for Train Electropneumatic Brake Systems. Actuators 2023, 12, 372. [Google Scholar] [CrossRef]
- Shewale, N.S.; Deivanathan, R. Modelling and Simulation of Anti-lock Braking System. Int. J. Eng. Tech. Res. 2017, 7, 2454–4698. [Google Scholar]
- Przybysz, M. Badania Niezgodności Kinematycznej Hydrostatycznych Układów Napędowych Bezzałogowych Platform Lądowych. Master’s Thesis, Military University of Technology, Warsaw, Poland, 2019. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Engine max. power | N = 9.9 kW |
| Nominal engine speed | n = 3600 rpm |
| Pump max. displacement | qp = 18 cm3/rev |
| Hydraulic motor displacement | qs = 5 cm3/rev |
| Max. pump and motor pressure | 31.5 MPa |
| Total final drive ratio | i = 19.3 |
| Type | Parameter Value |
|---|---|
| Front body mass | m1 = 132 kg |
| Mass front body moment of inertia | I1x = 4.6 kg m2 I1y = 18.9 kg m2 I1z = 19.3 kg m2 |
| Rear body mass | m2 = 127 kg |
| Mass rear body moment of inertia | I2x = 3.8 kg m2 I2y = 6.8 kg m2 I2z = 8.5 kg m2 |
| Wheels mass | mk1 = mk2 = mk3 = mk4 = 5.36 kg |
| Mass wheel moment of inertia | Ikx1 = Ikx2 = Ikx3 = Ikx4 = 0.132 kg m2 Iky1 = Iky2 = Iky3 = Iky4 = 0.252 kg m2 Ikz1 = Ikz2 = Ikz3 = Ikz4 = 0.132 kg m2 |
| Wheel radius | r = 0.30 m |
| Wheel Element | Parameter Type | Symbol | Parameter Value |
|---|---|---|---|
| Rim | Mass | mo | 2.5 kg |
| Inertia | Jo | 0.520 kg m2 | |
| Carcass | Mass | m1 | 0.02 kg |
| Inertia | J1 | 0.006 kg m2 | |
| Number of elements | - | 72 | |
| Stiffness | kw1 kw2 kw3 kw4 kw5 kw6 | 100,000 N/m 100,000 N/m 1 Nm/rad 10,000,000 N/m 20 N/m 1 Nm/rad | |
| Damping | cw1 cw2 cw3 cw4 cw5 cw6 | 10,000 Ns/m 500 Ns/m 500 Nms/rad 100 Ns/m 100 Ns/m 1 Nms/rad | |
| Tread | Mass | m2 | 0.02 kg |
| Inertia | J2 | 0.006 kg m2 | |
| Number of elements | - | 72 | |
| Stiffness | kw7 kw8 kw9 kw10 kw11 kw12 | 500,000 N/m 500,000 N/m 1 Nm/rad 5,000,000 N/m 5,000,000 N/m 1 Nm/rad | |
| Damping | cw7 cw8 cw9 cw10 cw11 cw12 | 500 Ns/m 500 Ns/m 0.1 Nms/rad 100 Ns/m 100 Ns/m 0.1 Nms/rad |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Łopatka, M.J.; Cieślik, K.; Krogul, P.; Muszyński, T.; Przybysz, M.; Rubiec, A.; Spadło, K. Research on Terrain Mobility of UGV with Hydrostatic Wheel Drive and Slip Control Systems. Energies 2023, 16, 6938. https://doi.org/10.3390/en16196938
Łopatka MJ, Cieślik K, Krogul P, Muszyński T, Przybysz M, Rubiec A, Spadło K. Research on Terrain Mobility of UGV with Hydrostatic Wheel Drive and Slip Control Systems. Energies. 2023; 16(19):6938. https://doi.org/10.3390/en16196938
Chicago/Turabian StyleŁopatka, Marian Janusz, Karol Cieślik, Piotr Krogul, Tomasz Muszyński, Mirosław Przybysz, Arkadiusz Rubiec, and Kacper Spadło. 2023. "Research on Terrain Mobility of UGV with Hydrostatic Wheel Drive and Slip Control Systems" Energies 16, no. 19: 6938. https://doi.org/10.3390/en16196938
APA StyleŁopatka, M. J., Cieślik, K., Krogul, P., Muszyński, T., Przybysz, M., Rubiec, A., & Spadło, K. (2023). Research on Terrain Mobility of UGV with Hydrostatic Wheel Drive and Slip Control Systems. Energies, 16(19), 6938. https://doi.org/10.3390/en16196938