


Application of Machine Learning to Classify the Technical Condition of Marine Engine Injectors Based on Experimental Vibration Displacement Parameters


Abstract
:1. Introduction
2. State of Knowledge
2.1. About Neural Networks in General
- (1)
- In the training stage, the values of the output vector are equal to the known values of y0. Learning consists in giving the neuron input the values of x(τ), for which we know the correct values of the output data d(τ), called standard signals. The set of input signals and their corresponding standard signals is called the training sequence. After entering the input value, the output signal of the neuron is calculated. The weights are modified in such a way as to minimize the error between the standard signal and the neuron output. The learning algorithm is as follows [13]: We randomly select the initial weights of neurons.
- (2)
- We give the training vector x to the neuron’s input.
- (3)
- The output value of the perceptron is calculated according to Formula (1).
- (4)
- The output value y(τ) is compared with the reference value of the training chain d(t).
- (5)
- The weights are changed according to the following relationships
- y(x(t)) ≠ d(x(t)) ⇒ Wi(t + 1) = wi(t) + η(d − f(s)) f′(s)xi;
- y(x(t)) = d(x(t)) ⇒ we(t + 1) = wi(t).
- (6)
- We return to point 2.
2.2. Existing Methods of Damage Recognition
3. Materials and Methods
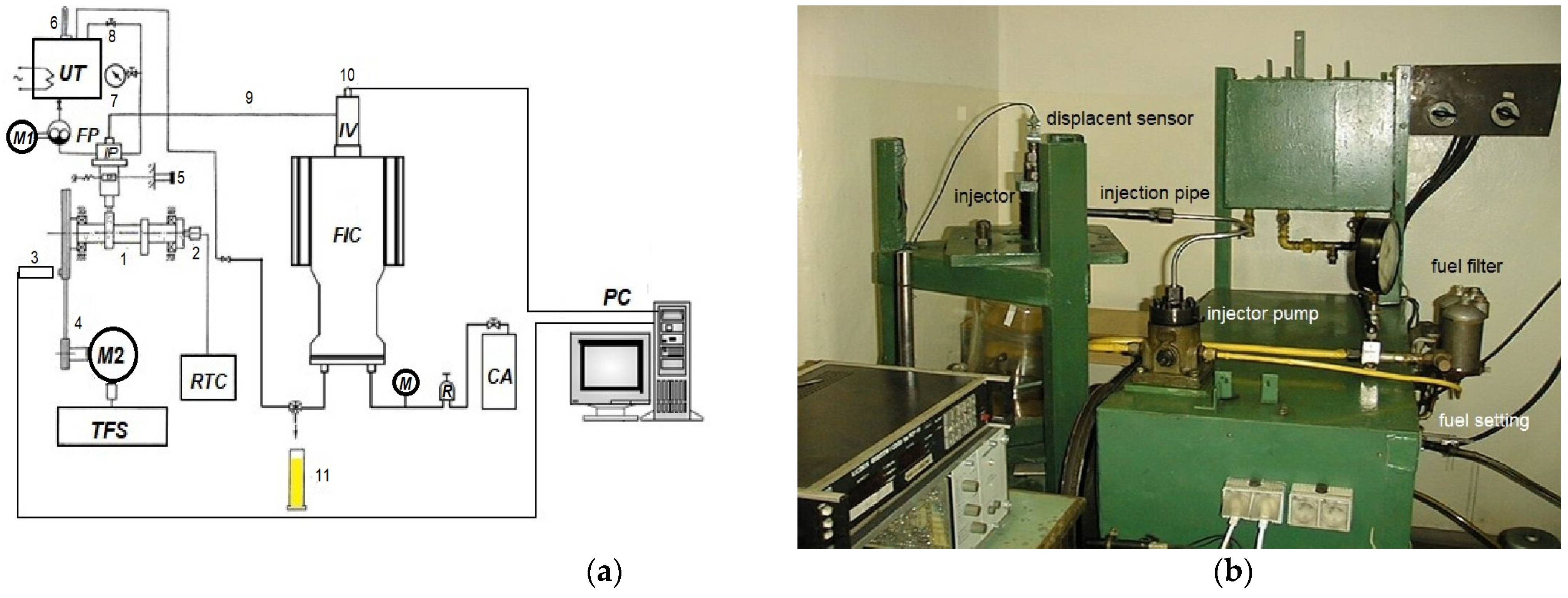
3.1. Test Method
- -
- A test table;
- -
- A system of processing signals;
- -
- A system of digital processing and analysis.
3.2. Experimentally Simulated Technical States of the Injector
- -
- Injection pump supply pressure pf from 0.15 to 0.30 MPa;
- -
- Camshaft speed n from 150 to 450 rpm;
- -
- Fuel temperature at the injector inlet tp = 20−50 °C;
- -
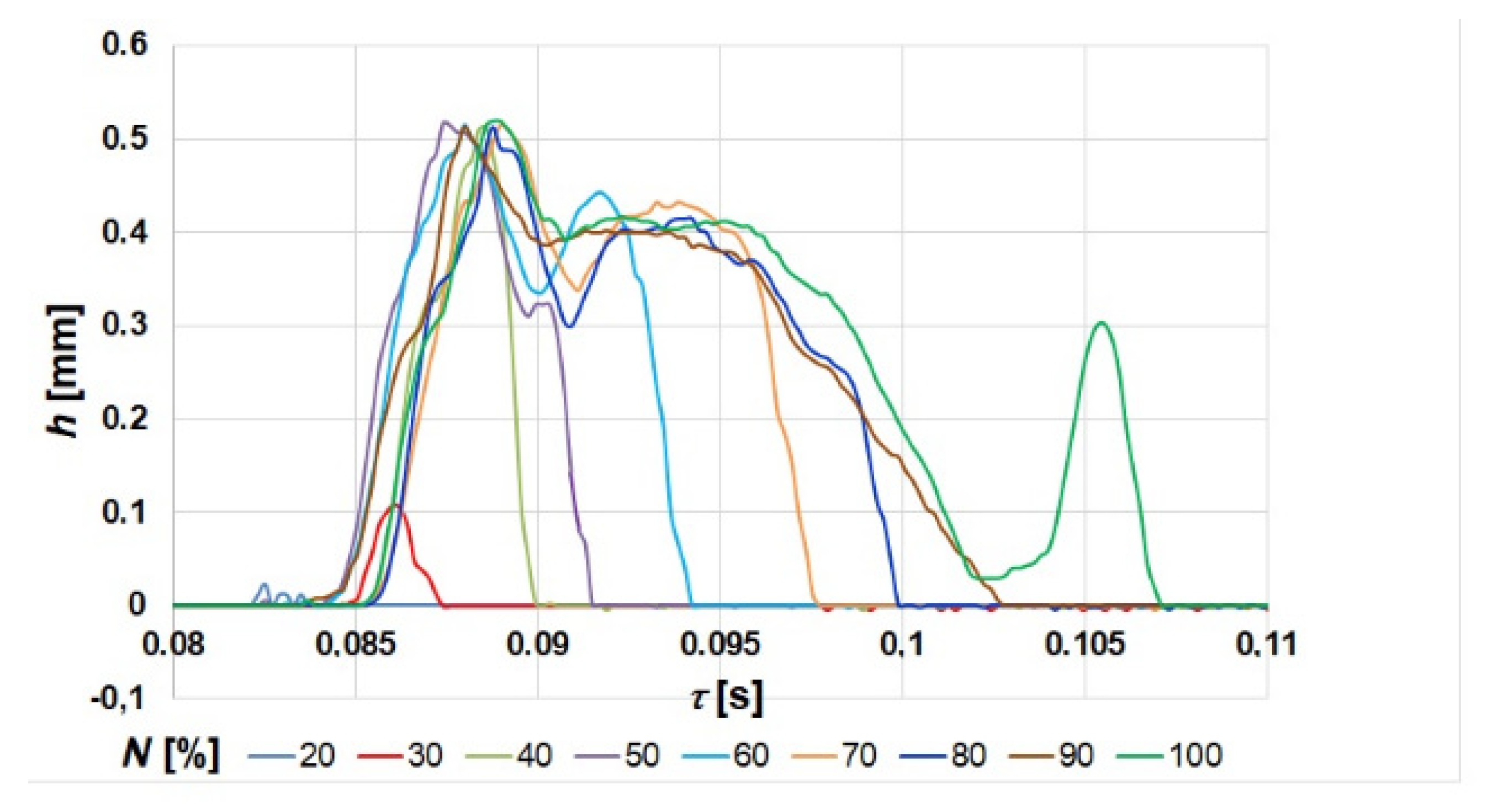
- Fuel dose control strip setting from 20 to 100%;
- -
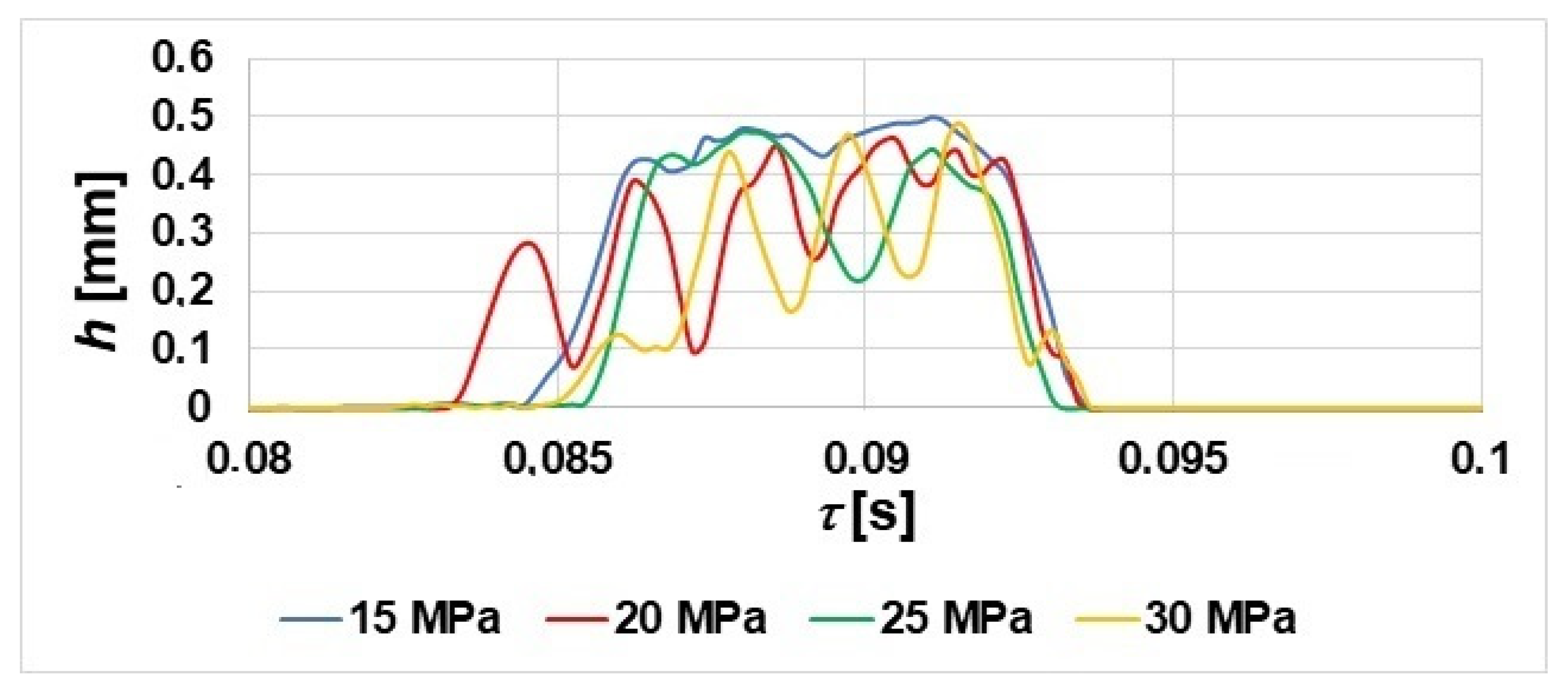
- Changes in the tension of the spring, causing changes in the opening pressure of the injector needle in the range Po = 15–30 MPa (the strength of the spring tension to achieve the required injector opening pressure);
- -
- Changes in the number of expensive holes in the injector nozzle i = 4 to 7;
- -
- Changes in the diameter of the spray holes d = 0.23 to 0.28 mm;
- -
- Changes in the average clearance at the leading part of the body and needle of the injector La;
- -
- Changing the maximum needle lift hmax;
- -
- Changes in the nozzle needle cone angle α = 59 to 61 °C.
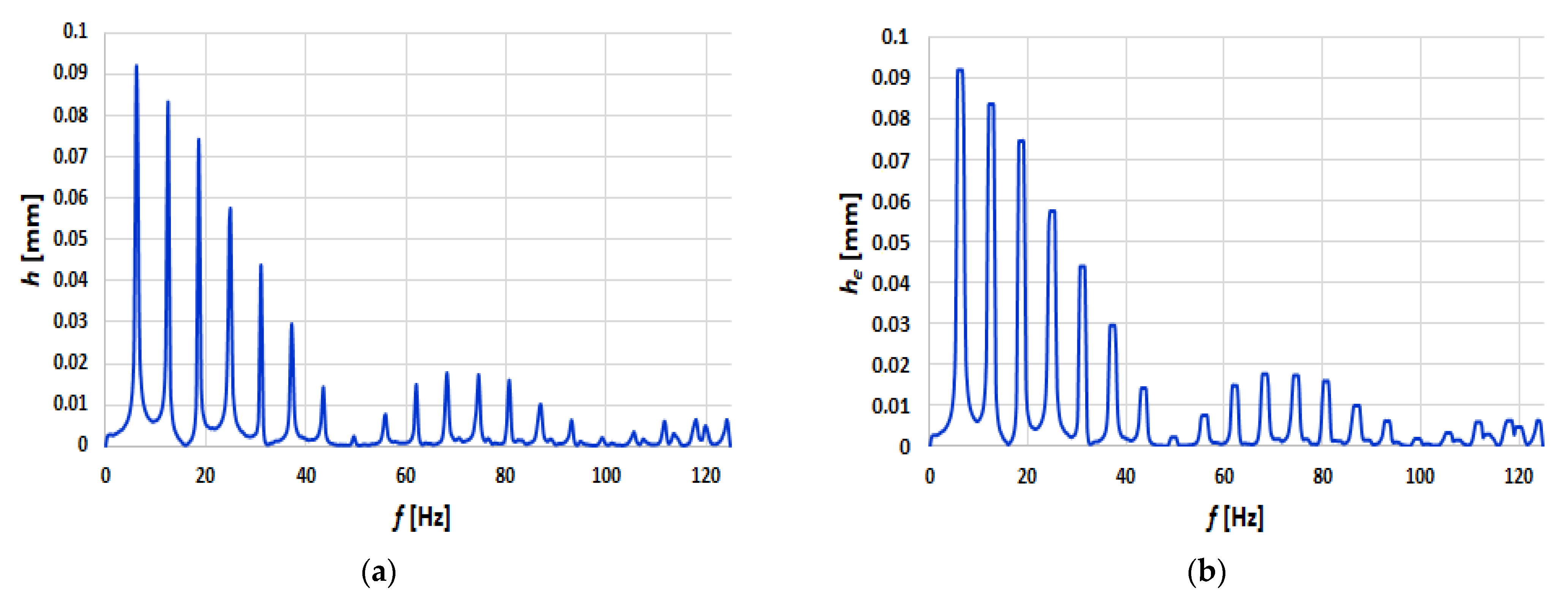
3.3. Data Preparation for the Neural Network Model
- -
- Root-mean-square values:
- -
- Average value:
- -
- Positive peak value:for 0 ≤ τ ≤ T.
- -
- Shape factor:
- -
- Peak factor:
- -
- Impulsivity factor:
3.4. Estimating Maximum Relative Errors of Diagnoses
4. Results
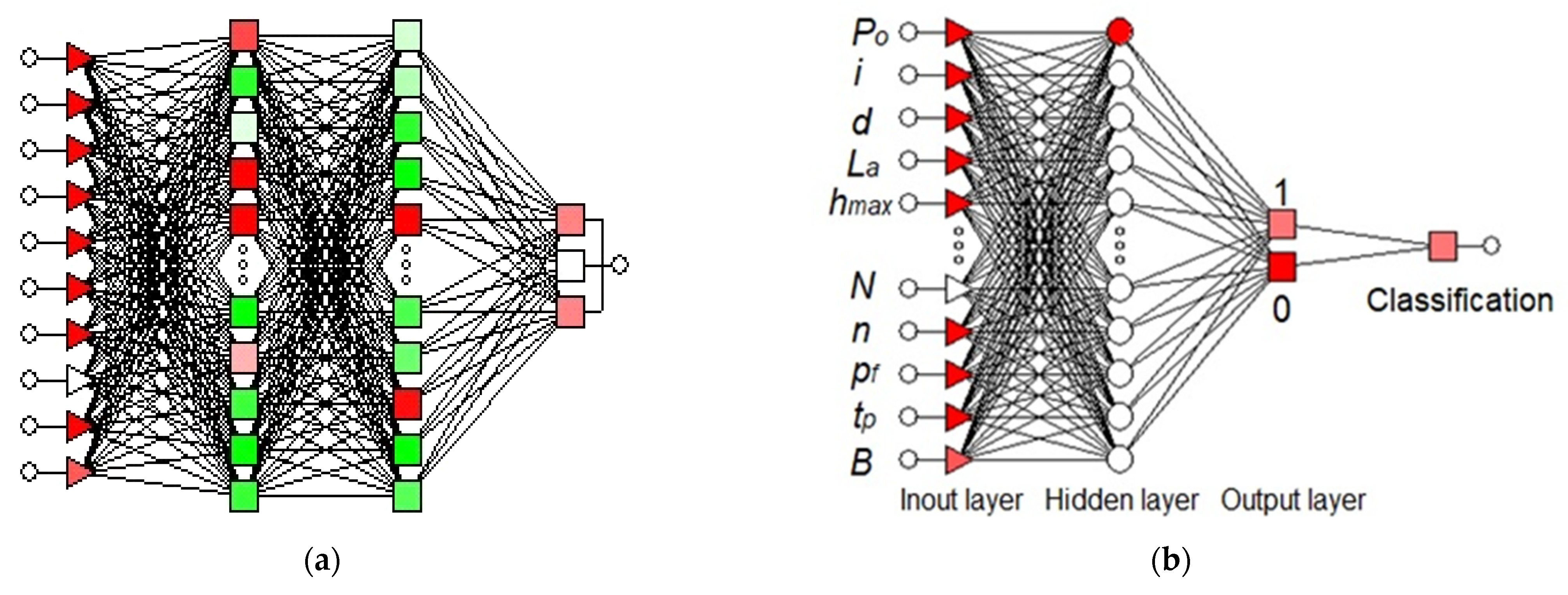
4.1. Neural Network Learning Results
- -
- (0,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1)—inappropriate opening pressure of the injector;
- -
- (1,0,1,1, 1,1,1,1,1,1,1,1,1,1,1)—number of patented holes less than 7;
- -
- (1,1,0,1, 1,1,1,1,1,1,1,1,1,1,1)—diameter of the pinholes not within the tolerance field;
- -
- (1,1,1,1,0,1,1,1,1,1,1,1,1,1,1,1,1)—improper clearance in the guiding part of the body and the nozzle needle;
- -
- (1,1,0,1, 1,1,1,1,1,1,1,1,1,1)—needle cone angle not within the tolerance field;
- -
- (1,1,1,1,1, 1,1,0,1,1,1,1,1,1)—incorrect camshaft rotational speed;
- -
- (1,1,1,1, 1,1,1,1,0,1,1,1,1)—incorrect fuel setting;
- -
- (1,1,1,1, 1,1,1,1,1,0,1,1)—incorrect injection pump supply pressure;
- -
- (1,1,1,1,1, 1,1,1,1,1,1,0,1)—improper fuel temperature;
- -
- (1,1,1,1,1, 1,1,1,1,1,1,1,1,1,0)—incorrect dose of fuel pumped through the nozzle.
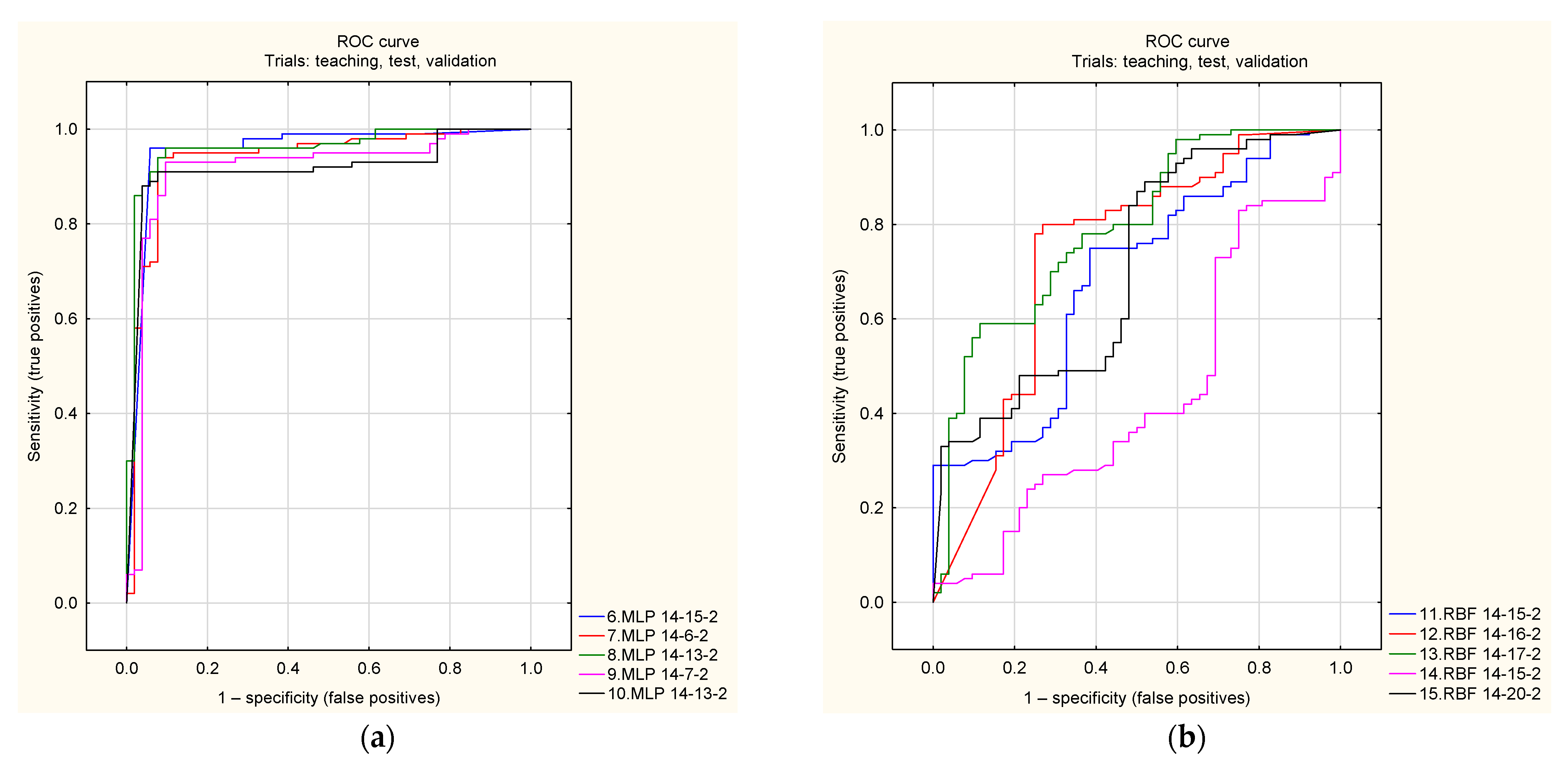
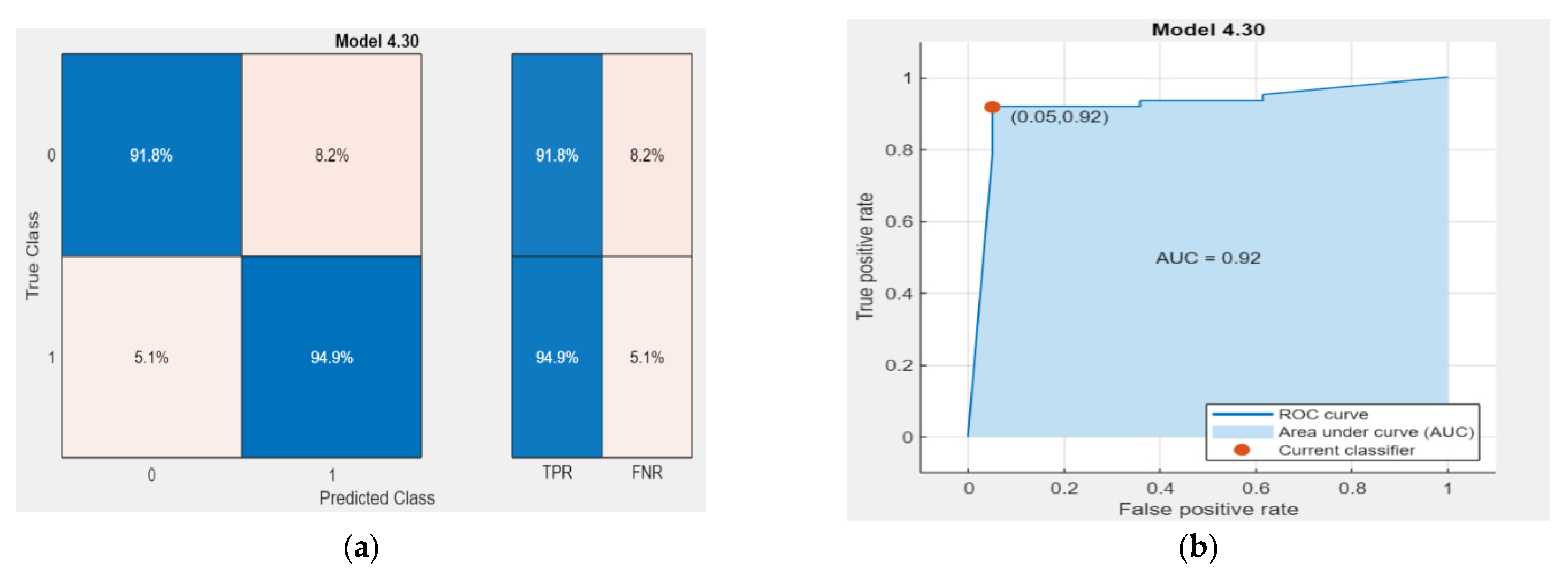
4.2. Analysis and Interpretation of Test Results
5. Discussion
6. Conclusions
7. Patents
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| ANN | artificial neural networks |
| B | fuel injection dose |
| d | diameter of the pinholes |
| f | frequency |
| F | force |
| h | needle lift |
| haver | average value of needle lift |
| Hi | values of the amplitudes of the individual components |
| hmax | the maximum needle lift |
| hp | peak value of needle lift |
| hrms | root-mean-square values of needle lift |
| I | number of patented holes |
| ICE | internal combustion engine |
| La | clearance in the guiding part of the body and the nozzle needle |
| ML | machine learning |
| MLP | multilayer perceptron |
| n | camshaft rotational speed |
| NN | neural network |
| N | fuel setting |
| p | pressure |
| pf | injection pump supply pressure |
| Po | opening pressure of the injector |
| SIE | self-ignition engine |
| St | technical state |
| tp | fuel temperature at the inlet |
| a | needle cone angle |
| τ | time |
References
- Monieta, J. Selection of diagnostic symptoms and injection subsystems of marine reciprocating internal combustion engines. Appl. Sci. 2019, 9, 1540. [Google Scholar] [CrossRef]
- Klimkiewicz, M. Application of neural networks in the diagnostics of the fuel apparatus of compression-ignition engines. Agricult. Eng. 2005, 8, 153–160. [Google Scholar]
- Żółtowski, B.; Cempel, C. Elements of the Theory of Technical Diagnostics. In Engineering of Diagnostics Machines; Society of Technical Diagnostics: Bydgoszcz, Poland, 2004; pp. 17–525. [Google Scholar]
- Marine Engine IMO Tier II and Tier III Programme. Engineering for Future—Since 1758. MAN Diesel & Turbo. 2015. Available online: https://www.man-es.com/marine/products/planning-tools-and-downloads/marine-engine-programme (accessed on 16 January 2023).
- Monieta, J. Application of image color analysis for the assessment of injector nozzle deposits in internal combustion engines. SAE Int. J. Fuels Lubr. 2022, 2, 1–12. [Google Scholar] [CrossRef]
- Monieta, J.; Łukomski, M. Methods and means of estimation of technical state features of the marine diesel engines injector nozzles type Sulzer 6AL20/24. Scient. J. Mar. Univ. Szczecin 2005, 5, 383–392. Available online: https://wydawnictwo_am_szczecin_plzeszyty-naukowepobierzcategory19-zn-5-77-omiuo-2005 (accessed on 15 March 2023).
- Klimkiewicz, M. Neural model for localization of damage to injection pumps. Agricult. Eng. 2008, 1, 159–164. [Google Scholar]
- Pantelelis, N.G.; Kanarachos, A.E.; Gotzias, N.D.; Papandreou, N.; Gu, F. Combining vibrations and acoustics for the fault detection of marine diesel engines using neural networks and wavelets. In Proceedings of the 14th International Congress on Condition Monitoring and Diagnostic Engineering Management (COMADEM 2001), Manchester, UK, 4–6 September 2001; pp. 649–656. [Google Scholar]
- Haukin, S. Neural Networks, A Comprehensive Foundation; Macmillan College Publishing Company: New York, NY, USA, 2000. [Google Scholar]
- Kecman, V. Support Vector Machines, Neural Networks and Fuzzy Logic Models; MIT Press: Cambridge, MA, USA, 2001. [Google Scholar]
- Osowski, S. Neural Networks for Information Processing; Publishing House of the Warsaw University of Technology: Warsaw, Poland, 2006. [Google Scholar]
- Schoellkopf, B.S.; Smola, A.J. Learning with Kernels; MIT Press: Cambridge, MA, USA, 2002. [Google Scholar]
- Rutkowski, L. Methods and Techniques of Artificial Intelligence; National Scientific Publishing House: Warsaw, Poland, 2012. [Google Scholar]
- Brzeżański, M.; Golomb, P. Application of the neural network method for the analysis of particulate emissions in the exhaust of CI and SI engines. Combust. Eng. 2009, SC1, 331–337. [Google Scholar]
- Jankowski, M.; Kwidziński, M. Application of Neural Network for Automatic Classification of Injection Apparatus; Congress of Technical Diagnostics: Gdansk, Poland, 1996; pp. 312–318. [Google Scholar]
- Lewicki, P.; Hill, T. Statistics Methods and Applications Book; StatSoft: Tulsa, OK, USA, 2011. [Google Scholar]
- Monieta, J.; Choromański, T. The application of artificial intelligence to identification of typical damages of marine diesel engines injectors. Diagnostyka 2008, 4, 139–144. [Google Scholar]
- Sitnik, L. Neural networks in diesel engine control. In Proceedings of the PTNSS Congress—2005, The Development of Combustion Engines, Szczyrk, Poland, 25–28 September 2005; pp. 1–15. [Google Scholar]
- Cheliotis, M.; Lazakis, I.; Cheliotis, A. Bayesian and machine learning-based fault detection and diagnostics for marine applications. Offshor. Struct. 2022, 1, 1–13. [Google Scholar] [CrossRef]
- Raptodimos, Y.; Lazakis, I. Using artificial neural network-self-organising map for data clustering of marine engine condition monitoring applications. Ship. Offshor. Struct. 2018, 13, 649–656. [Google Scholar] [CrossRef]
- Wang, R.H.; Chen, H.; Guan, C. Random convolutional neural network structure: An intelligent health monitoring scheme for diesel engines. Measurement 2021, 171, 108786. [Google Scholar] [CrossRef]
- Xu, X.; Zao, Z.; Xu, X.; Yang, J.; Chang, L.; Yan, X.; Wang, G. Machine learning-based wear fault diagnosis for marine diesel engine by fusing multiple data-driven models. Knowl. Based Syst. 2020, 190, 105324. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, D.; Shen, G.; Yang, J. Research on fault diagnosis of marine diesel engine based on probabilistic neural network optimized by quantum genetic algorithm. In Proceedings of the 2021 IEEE 4th International Conference on Automation, Electronics and Electrical Engineering (AUTEEE), Shenyang, China, 19–21 November 2021; pp. 729–733. [Google Scholar]
- Abramek, K.; Osipowicz, T.; Mozga, Ł. The use of neural network algorithms for modeling injection doses of modern fuel injectors. Combust. Eng. 2021, 185, 10–14. [Google Scholar] [CrossRef]
- He, Y.; Rutland, C.J. Application of artificial neural networks in engine modeling. Int. J. Eng. Res. 2004, 5, 281–296. [Google Scholar] [CrossRef]
- Pawletko, R. The Use of neural networks for the faults classification of a marine diesel engine fuel injection system. Glob. J. Eng. Educ. 2005, 9, 143–148. [Google Scholar]
- Pawletko, R. Using a neural network to diagnose selected malfunctions of a marine engine. Diagnostyka 2002, 27, 43–47. [Google Scholar]
- Brzozowski, K.; Nowakowski, J. Application of artificial neural network to identify the working cycle model of compression ignition engine. In Proceedings of the First International Congress on Combustion Engines. PTNSS Congress—2005. The Development of Combustion Engines, Szczyrk, Poland, 25–28 September 2005; pp. 1–9. [Google Scholar]
- Logan, K.; Inozu, B.; Roy, P.; Hetet, J.F.; Chesse, P.; Tauzia, X. Real-time marine diesel engine simulation for fault diagnosis. Mar. Technol. Snam. News 2002, 39, 21–28. [Google Scholar] [CrossRef]
- Mesbahi, E. An intelligent sensor validation and fault diagnostic technique for diesel engines. J. Dyn. Sys. Measur. Contr. Trans. ASME 2001, 123, 141–144. [Google Scholar] [CrossRef]
- Ramteke, S.M.; Chelladurai, H.; Amarnath, M. Diagnosis of liner scuffing fault of a diesel engine via vibration and acoustic emission analysis. J. Vib. Eng. Technol. 2019, 8, 815–833. [Google Scholar] [CrossRef]
- Wang, R.H.; Chen, H.; Guan, C. A Bayesian inference-based approach for performance prognostics towards uncertainty quantification and its applications on the marine diesel engine. ISA Trans. 2021, 118, 159–173. [Google Scholar] [CrossRef]
- Garczynska, I.; Tomczak, A.; Stepien, G.; Kasyk, L.; Slaczka, W.; Kogut, T. Applicability of machine learning for vessel dimension survey with a minimum number of common points. Appl. Sci. 2022, 12, 3453. [Google Scholar] [CrossRef]
- Zhu, J.Y. Marine Diesel engine condition monitoring by use of bp neural network. In Proceedings of the International Multi Conference of Engineers and Computer Scientists Vol II IMECS 2009, Hong Kong, 18–20 March 2009; pp. 1–4. [Google Scholar]
- Klinkmann, J.E. Wärtsilä Asset Diagnostic Configurator. Bachelor’s Thesis, Novia University of Applied Science, Vaasa, Finland, 2019. [Google Scholar]
- Wang, R.H.; Chen, H.; Guan, C. DPGCN model: A novel fault diagnosis method for marine diesel engines based on imbalanced datasets. IEEE Trans. Instrum. Meas. 2023, 72, 3504011. [Google Scholar] [CrossRef]
- Shahid, S.M.; Ko, S.; Kwon, S. Real-Time Classification of Diesel Marine Engine Loads Using Machine Learning. Sensors 2019, 19, 3172. [Google Scholar] [CrossRef] [PubMed]
- Cheliotis, M.; Lazakis, I.; Theotokatos, G. Machine learning and data-driven fault detection for ship systems operations. Ocean Eng. 2020, 216, 107968. [Google Scholar] [CrossRef]
- Monieta, J. Diagnosing cracks in the injector nozzles of marine internal combustion engines during operation using vibration symptoms. Appl. Sci. 2023, 13, 9599. [Google Scholar] [CrossRef]
- Kowalski, J.; Krawczyk, B.; Woźniak, M. Fault diagnosis of marine 4-stroke diesel engines using a one-vs-one extreme learning ensemble. Eng. Appl. Artif. Intell. 2017, 57, 134–141. [Google Scholar] [CrossRef]
- Ramteke, S.M.; Chelladurai, H.; Amarnath, M. Diagnosis and Classification of Diesel Engine Components Faults Using Time-Frequency and Machine Learning Approach. J. Vib. Eng. 2022, 10, 175–192. [Google Scholar] [CrossRef]
- Adamkiewicz, A.; Nikonczuk, P. An attempt at applying machine learning in diagnosing marine ship engine turbochargers. Mainten. Reliab. 2022, 24, 795–804. [Google Scholar] [CrossRef]
- Zhao, H.; Mao, Z.; Chen, K.; Jiangn, Z. An intelligent fault diagnosis method for a diesel engine valve based on improved wavelet packet-Mel frequency and convolutional neural network. In Proceedings of the International Conference on Sensing, Diagnostics, Prognostics, and Control (SDPC) 2019, Beijing, China, 15–17 August 2019; pp. 354–359. [Google Scholar] [CrossRef]
- Monieta, J. Method and a device for testing the friction force in precision pairs of injection apparatus of the self-ignition engines. Energies 2022, 15, 6898. [Google Scholar] [CrossRef]
- Monieta, J.; Kasyk, L. Optimization of design and technology of injector nozzles in terms of minimizing energy losses on friction in compression ignition engines. Appl. Sci. 2021, 11, 7341. [Google Scholar] [CrossRef]
- StatSoft, Inc. Electronic Statistic Textbook; StatSoft: Tulsa, OK, USA, 2013; pp. 1984–2011. ISBN 13: 9781884233593. [Google Scholar]
- Tadeusiewicz, R.; Szaleniec, M. Lexicon of Neural Networks; Publisher of the Project Science Foundation: Wrocław, Poland, 2015. [Google Scholar]
- Çelebi, K.; Uludamar, E.; Tosun, E.; Yıldızhan, Ş.; Aydın, K.; Özcanlı, M. Experimental and artificial neural network approach of noise and vibration characteristic of an unmodified diesel engine fuelled with conventional diesel, and biodiesel blends with natural gas addition. Fuel 2017, 197, 159–173. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Po | i | d | La | hmax | α | n | N | pf | tp | B | St | |||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Unit | mm | mm | mm | MPa | – | mm | mm | mm | ° | rpm | % | MPa | °C | mm3 | – |
| 7 × 0.23R | 0.0850 | 0.0185 | 0.5414 | 25 | 7 | 0.23 | 0.0045 | 0.465 | 60.50 | 375 | 58 | 0.15 | 20 | 48.4 | 0 |
| 7 × 0.25R | 0.0818 | 0.0172 | 0.511 | 25 | 7 | 0.25 | 0.0035 | 0.456 | 60.80 | 375 | 58 | 0.15 | 20 | 52.9 | 0 |
| 7 × 0.26R | 0.0700 | 0.0162 | 0.485 | 25 | 7 | 0.26 | 0.0035 | 0.463 | 60.97 | 375 | 58 | 0.15 | 20 | 53.0 | 1 |
| 7 × 0.28R | 0.0589 | 0.0130 | 0.506 | 25 | 7 | 0.28 | 0.0040 | 0.465 | 60.98 | 375 | 58 | 0.15 | 20 | 50.7 | 0 |
| Item | Network Name | n | La | α | B | hrms | Po | N | i | pf | haver | hpeak | hmax |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | MLP 14-5-2 | 1.051 | 1.293 | 1.248 | 1.136 | 1.848 | 1.161 | 1.084 | 1.315 | 1.090 | 1.145 | 0.996 | 1.103 |
| 2 | MLP 14-13-2 | 2.819 | 1.748 | 1.845 | 1.754 | 1.473 | 1.274 | 1.549 | 1.191 | 1.218 | 1.195 | 1.173 | 1.100 |
| 3 | MLP 14-11-2 | 2.314 | 1.963 | 1.656 | 1.551 | 1.313 | 1.265 | 1.332 | 1.160 | 1.129 | 1.216 | 1.170 | 1.125 |
| 4 | MLP 14-6-2 | 2.077 | 1.698 | 1.880 | 1.679 | 1.605 | 1.634 | 1.436 | 1.655 | 1.394 | 1.196 | 1.359 | 1.046 |
| 5 | MLP 14-8-2 | 1.844 | 1.272 | 1.228 | 1.260 | 1.077 | 1.127 | 1.146 | 1.102 | 1.101 | 1.024 | 1.059 | 1.074 |
| 6 | MLP 14-7-2 | 1.877 | 1.742 | 1.603 | 1.560 | 1.094 | 1.306 | 1.104 | 1.171 | 1.189 | 1.125 | 1.083 | 1.068 |
| Average | 1.997 | 1.619 | 1.577 | 1.490 | 1.402 | 1.295 | 1.275 | 1.266 | 1.187 | 1.150 | 1.140 | 1.086 |
| Network ID | Network Name | Learning Quality | Testing Quality | Validation Quality | Error Function |
|---|---|---|---|---|---|
| 1 | MLP 14-5-2 | 92.06349 | 82.35294 | 100.0000 | SOS |
| 2 | MLP 14-13-2 | 93.65079 | 88.23529 | 100.0000 | Entropy |
| 3 | MLP 14-11-2 | 93.65079 | 94.11765 | 100.0000 | SOS |
| 4 | MLP 14-6-2 | 90.47619 | 94.11765 | 94.1176 | SOS |
| 5 | MLP 14-8-2 | 88.88889 | 94.11765 | 94.1176 | Entropy |
| 6 | MLP 14-7-2 | 90.47619 | 94.11765 | 94.1176 | Entropy |
| Network ID | Network Name | Classification Summary | State 0 | State 1 | State All |
|---|---|---|---|---|---|
| 1 | MLP 14-5-2 | Correct (%) | 95.65217 | 82.14286 | 91.75258 |
| Incorrect (%) | 4.34783 | 17.85714 | 8.24742 | ||
| 2 | MLP 14-13-2 | Correct (%) | 97.10145 | 85.71429 | 93.81443 |
| Incorrect (%) | 2.89855 | 14.28571 | 6.18557 | ||
| 3 | MLP 14-11-2 | Correct (%) | 95.65217 | 92.85714 | 94.84536 |
| Incorrect (%) | 4.34783 | 7.14286 | 5.15464 |
| Network ID | Area and ROC Threshold for Sampling: Teaching, Testing, Validation | |||||
|---|---|---|---|---|---|---|
| MLP 14-5-2 | MLP 14-13-2 | MLP 14-11-2 | MLP 14-6-2 | MLP 14-8-2 | MLP 14-7-2 | |
| 1 | 0.932712 | 0.972050 | 0.966874 | 0.966874 | 0.965839 | 0.965321 |
| 2 | 0.530628 | 0.682748 | 0.551377 | 0.551377 | 0.434712 | 0.482753 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Monieta, J.; Kasyk, L. Application of Machine Learning to Classify the Technical Condition of Marine Engine Injectors Based on Experimental Vibration Displacement Parameters. Energies 2023, 16, 6898. https://doi.org/10.3390/en16196898
Monieta J, Kasyk L. Application of Machine Learning to Classify the Technical Condition of Marine Engine Injectors Based on Experimental Vibration Displacement Parameters. Energies. 2023; 16(19):6898. https://doi.org/10.3390/en16196898
Chicago/Turabian StyleMonieta, Jan, and Lech Kasyk. 2023. "Application of Machine Learning to Classify the Technical Condition of Marine Engine Injectors Based on Experimental Vibration Displacement Parameters" Energies 16, no. 19: 6898. https://doi.org/10.3390/en16196898
APA StyleMonieta, J., & Kasyk, L. (2023). Application of Machine Learning to Classify the Technical Condition of Marine Engine Injectors Based on Experimental Vibration Displacement Parameters. Energies, 16(19), 6898. https://doi.org/10.3390/en16196898