

Robust PLL-Based Grid Synchronization and Frequency Monitoring




Abstract
:1. Introduction
2. Grid Monitoring and Synchronization Algorithms
2.1. FFDSOGI-PLL
2.1.1. Block Diagram
2.1.2. SRF-PLL Design
2.2. Proposed PLL
2.2.1. Block Diagram
2.2.2. Band Pass Filter Design
2.2.3. Common Mode Voltage Extraction
2.2.4. Mean Value Computation
2.2.5. PI Tuning Procedure
3. Considerations for Practical Implementation in Microcontrollers
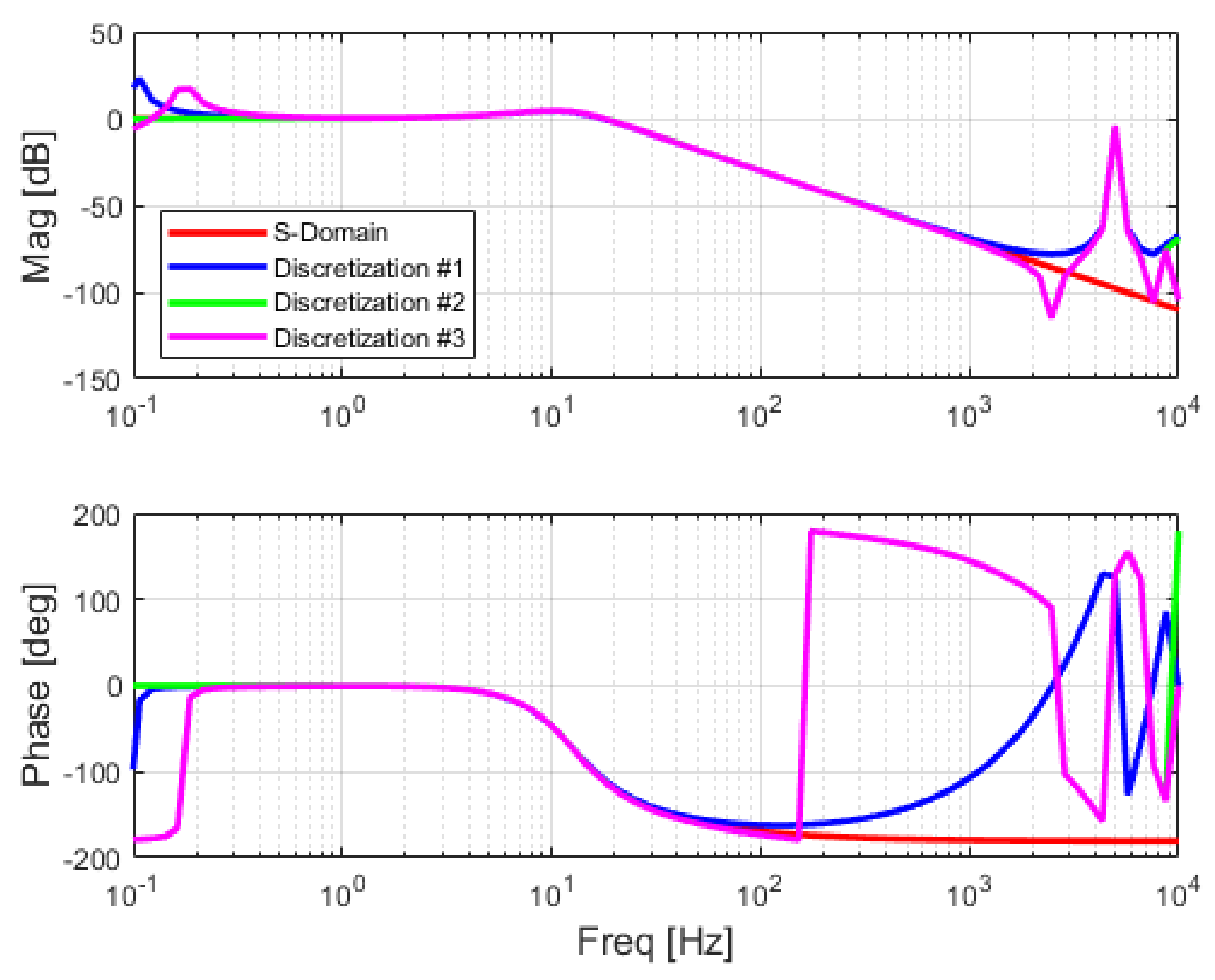
3.1. Discretization Methods
3.2. Sensitivity Analysis for FFDSOGI
3.3. Sensitivity Analysis for Proposed PLL
3.3.1. Band Pass Filter
3.3.2. PLL Main Loop
3.4. MVC Implementation
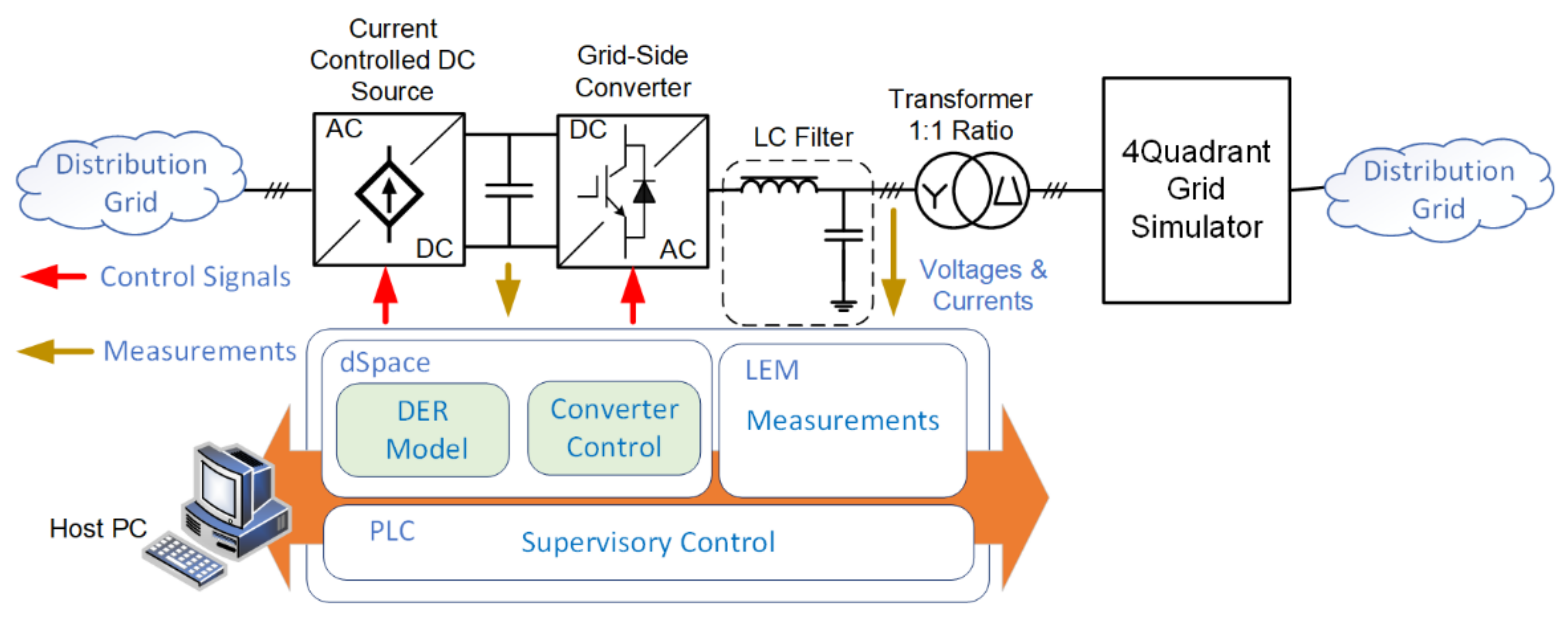
4. Experimental Validation
4.1. Setup Description
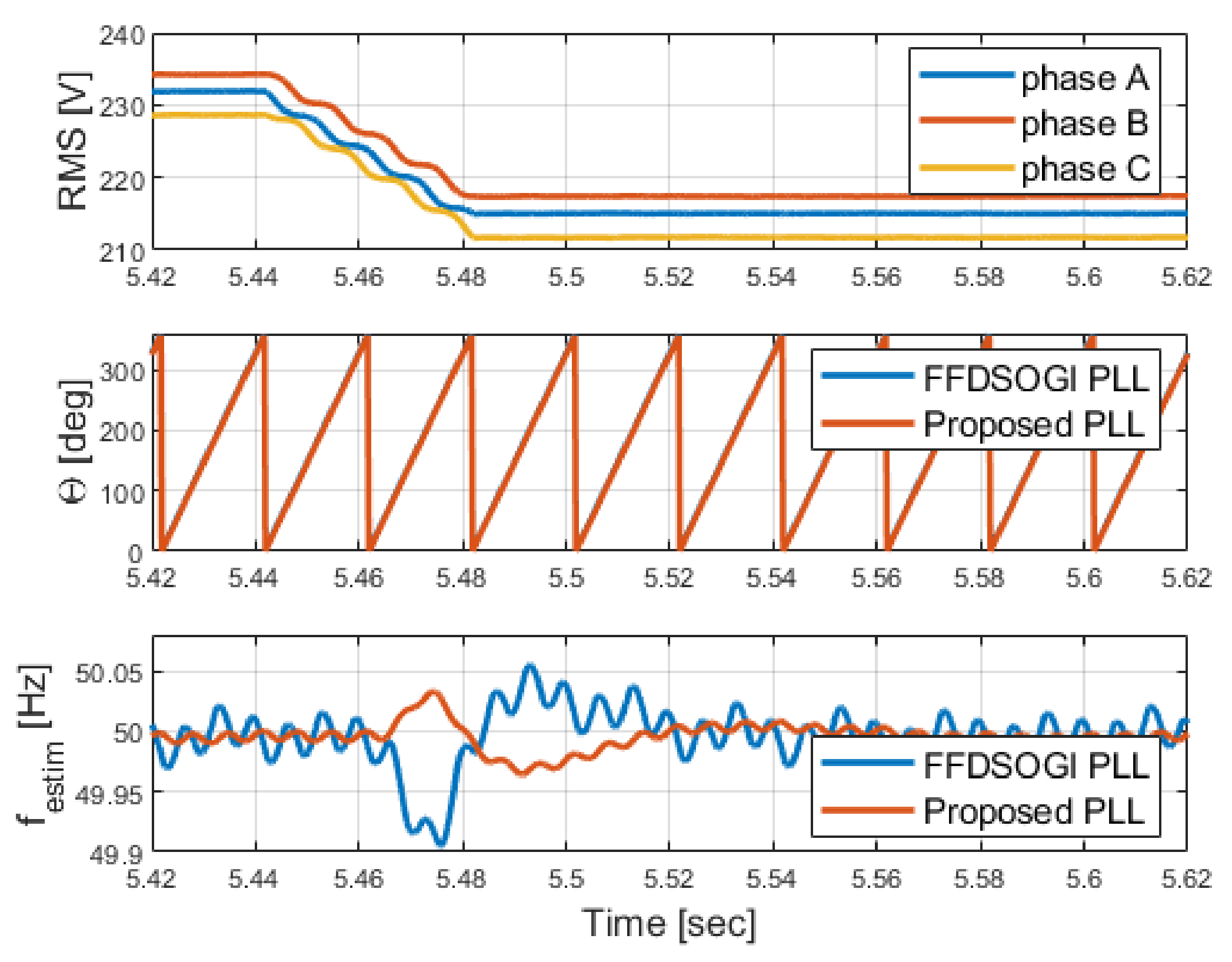
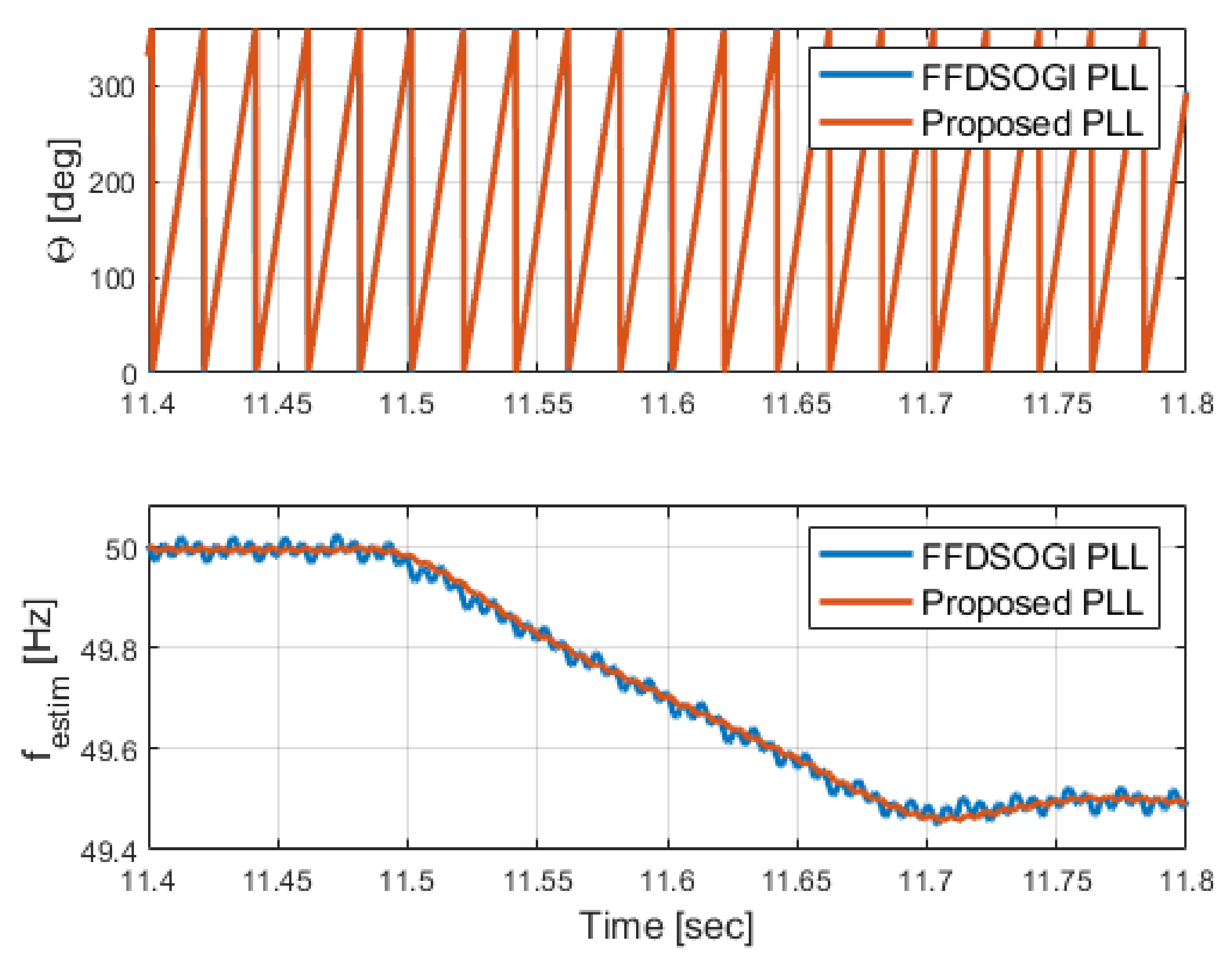
4.2. Experimental Results
4.2.1. Voltage Dip
4.2.2. Frequency Excursion
4.2.3. Phase Jumps
4.2.4. Steady State Operation
4.3. Summary
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- REN21. Renewables 2021 Global Status Report; REN21 Secretariat: Paris, France, 2021; ISBN 9783948393038. Available online: https://www.ren21.net/reports/global-status-report/ (accessed on 17 February 2022).
- Available online: https://ec.europa.eu/eurostat/statistics-explained/index.php?title=Renewable_energy_statistics#Wind_and_water_provide_most_renewable_electricity.3B_solar_is_the_fastest-growing_energy_source (accessed on 17 February 2022).
- IEA. Global EV Outlook 2022; License: CC BY 4.0; IEA: Paris, France, 2022; Available online: https://www.iea.org/reports/global-ev-outlook-2022 (accessed on 17 February 2022).
- IEA. The Future of Hydrogen; License: CC BY 4.0; IEA: Paris, France, 2019; Available online: https://www.iea.org/reports/the-future-of-hydrogen (accessed on 17 February 2022).
- TV2 News. Available online: https://nyheder.tv2.dk/lokalt/2021-12-25-hundredvis-af-huse-uden-stroem-hele-juleaften-familie-spiste-sig-maet-i#:~:text=I%20Fredericia%20havde%20flere%20hundrede%20mennesker%20ikke%20str%C3%B8m%20juleaften.&text=%C3%85rsagen%20til%20str%C3%B8mafbrydelsen%20var%20if%C3%B8lge,resulterede%20i%20en%20sprunget%20sikring (accessed on 17 February 2022).
- ENTSO-E. ENTSO-E Network Code for Requirements for Grid Connection Applicable to All Generators; ENTSO-E: Brussels, Belgium, 2012. [Google Scholar]
- Energinet. Technical Regulation 3.2.2 for PV Power Plants above 11 kW; Energinet: Erritsø, Denmark, 2016. [Google Scholar]
- Energinet. Technical Regulation 3.3.1 for Battery Plants; Energinet: Erritsø, Denmark, 2017. [Google Scholar]
- Dansk Energi. Technical Regulation for Grid Connection of Consumers to Utility Grid below 1 kV; Green Power Denmark: Copenhagen, Denmark, 2022. (In Danish) [Google Scholar]
- DS/EN 50160:2010; Voltage Characteristics of Electricity Supplied by Public Electricity Networks. The Slovenian Institute for Standardization: Ljubljana, Slovenia, 2010.
- DS/EN 60038:2011; CENELEC Standard Voltages. The Slovenian Institute for Standardization: Ljubljana, Slovenia, 2011.
- Ingeteam. Available online: https://www.ingeteam.com/en-us/power-electronics/power-converters/pc28_6_171/ingedrive-lv200.aspx (accessed on 9 August 2023).
- ABB. Available online: https://new.abb.com/power-converters-inverters/wind-turbines/utility-scale/acs880/technical-data (accessed on 9 August 2023).
- Fronius Tauro. Available online: https://www.fronius.com/en/solar-energy/installers-partners/products-solutions/commercial-energy-solutions/tauro-commercial-solar-inverter-for-large-scale-pv-systems (accessed on 9 August 2023).
- Danfoss EC-C1200-450. Available online: https://www.danfoss.com/en/products/dps/electric-converters-and-machines/electric-converters-and-machines/electric-converters/#tab-overview (accessed on 9 August 2023).
- SMA Sunny Central Up. Available online: https://www.sma.de/en/products/solarinverters/sunny-central-2200-2475-2500-ev-2750-ev-3000-ev.html (accessed on 9 August 2023).
- SMA Sunny Central Storage. Available online: https://www.sma.de/en/products/battery-inverters/sunny-central-storage-1900-2200-2475-2900.html (accessed on 9 August 2023).
- Timbus, A. Grid Monitoring and Advanced Control of Distributed Power Generation Systems. Ph.D. Thesis, Institute of Energy Technology, Aalborg University, Aalborg, Denmark, 2007. [Google Scholar]
- Teodorescu, R.; Liserre, M.; Rodriguez, P. Grid Converters for Photovoltaic and Wind Power Systems; IEEE: Piscataway, NJ, USA; John Wiley and Sons Ltd.: Singapore, 2011; pp. 43–89. ISBN 9780470057513. [Google Scholar]
- Eren, S.; Karimi-Ghartemani, M.; Bakhshai, A. Enhancing the three-phase synchronous reference frame PLL to remove unbalance and harmonic errors. In Proceedings of the 35th Annual Conference of IEEE Industrial Electronics, Porto, Portugal, 3–5 November 2009; pp. 437–441. [Google Scholar] [CrossRef]
- Guo, X.; Wu, W.; Chen, Z. Multiple-Complex Coefficient-Filter-Based Phase-Locked Loop and Synchronization Technique for Three-Phase Grid-Interfaced Converters in Distributed Utility Networks. IEEE Trans. Ind. Electron. 2011, 58, 1194–1204. [Google Scholar] [CrossRef]
- Gonzalez-Espin, F.; Figueres, E.; Garcera, G. An Adaptive Synchronous-Reference-Frame Phase-Locked Loop for Power Quality Improvement in a Polluted Utility Grid. IEEE Trans. Ind. Electron. 2012, 59, 2718–2731. [Google Scholar] [CrossRef]
- Golestan, S.; Monfared, M.; Freijedo, F.D. Design-Oriented Study of Advanced Synchronous Reference Frame Phase-Locked Loops. IEEE Trans. Power Electron. 2013, 28, 765–778. [Google Scholar] [CrossRef]
- Hadjidemetriou, L.; Kyriakides, E.; Blaabjerg, F. A New Hybrid PLL for Interconnecting Renewable Energy Systems to the Grid. IEEE Trans. Ind. Appl. 2013, 49, 2709–2719. [Google Scholar] [CrossRef]
- Golestan, S.; Ramezani, M.; Guerrero, J.M.; Freijedo, F.D.; Monfared, M. Moving Average Filter Based Phase-Locked Loops: Performance Analysis and Design Guidelines. IEEE Trans. Power Electron. 2014, 29, 2750–2763. [Google Scholar] [CrossRef]
- Subramanian, C.; Kanagaraj, R. Rapid Tracking of Grid Variables Using Prefiltered Synchronous Reference Frame PLL. IEEE Trans. Instrum. Meas. 2015, 64, 1826–1836. [Google Scholar] [CrossRef]
- Matas, J.; Martin, H.; Elmariachet, J.; Abusorrah, A.; Al-Turki, Y. A new LPF-based grid frequency estimation for the SOGI filter with improved harmonic rejection. In Proceedings of the International Conference on Renewable Energies and Power Quality (ICREPQ’18), Salamanca, Spain, 21–23 March 2018. [Google Scholar]
- Zhao, J.; Zhan, L.; Yin, H.; Li, F.; Yao, W.; Liu, Y. Recent Development of Frequency Estimation Methods for Future Smart Grid. IEEE Open Access J. Power Energy 2020, 7, 354–365. [Google Scholar] [CrossRef]
- Reza, M.S.; Hossain, M.M.; Agelidis, V.G. A Method without Stability Issue for Robust Estimation of Three-Phase Grid Frequency. IEEE J. Emerg. Sel. Top. Ind. Electron. 2021, 3, 854–859. [Google Scholar] [CrossRef]
- Zielinski, D.; Fatyga, K. Frequency Estimation for Grid-Tied Inverters Using Resonant Frequency Estimator. Energies 2021, 14, 6513. [Google Scholar] [CrossRef]
- Chamorro, H.R.; Guel-Cortez, A.-J.; Africano, Y.; Jimenez, F.; Tonkoski, R.; Martinez, W. Grid frequency estimation based on extended kalman filter in connected AC microgrids. In Proceedings of the IEEE 30th International Symposium on Industrial Electronics (ISIE), Kyoto, Japan, 20–23 June 2021. [Google Scholar] [CrossRef]
- Pinto, J.; Carvalho, A.; Rocha, A.; Araújo, A. Comparison of DSOGI-Based PLL for Phase Estimation in Three-Phase Weak Grids. Electricity 2021, 2, 244–270. [Google Scholar] [CrossRef]
- Umland, J.W.; Safiuddin, M. Magnitude and symmetric optimum criterion for the design of linear control systems: What is it and how does it compare with the others? IEEE Trans. Ind. Appl. 1990, 26, 489–497. [Google Scholar] [CrossRef]
- Petersen, L.; Iov, F. Practical considerations regarding Implementation of wind power applications into real-time hardware-in-the-loop framework. In Proceedings of the NEIS Conference 2016: Sustainable Energy Supply and Energy Storage Systems (Nachhaltige Energieversorgung und Integration von Speichern), Hamburg, Germany, 15–16 September 2016; Schulz, D., Ed.; Springer: Cham, Switzerland, 2017; pp. 61–66. [Google Scholar]
- Levine, W.S. The Control Handbook; CRC Press: Boca Raton, FL, USA, 1996. [Google Scholar]
- Embedded Code Generation—MATLAB & Simulink Solutions, (n.d.). Available online: https://se.mathworks.com/solutions/embedded-code-generation.html (accessed on 29 November 2022).
- Ionel, D.M.; Blaabjerg, F. Renewable Energy Devices and Systems with Simulations in MATLAB® and ANSYS®; CRC Press: Boca Raton, FL, USA, 2020; ISBN 139780367656218. [Google Scholar]
- Ciobotaru, M. Reliable Grid Condition Detection and Control of Sigle-Phase Distributed Power Generation Systems. Ph.D. Dissertation, Aalborg University, Aalborg, Denmark, 2009. [Google Scholar]
- Ogata, K. Modern Control Engineering; Prentice Hall: Hoboken, NJ, USA, 2009; ISBN 0130432458. [Google Scholar]
- ENTSO-E. Rate of Change of Frequency (RoCoF) Withstand Capability; ENTSO-E: Brussels, Belgium, 2018. [Google Scholar]
- Regatron Datasheet TC.ACS.50.528.4WR.S.LC.; Regatron: Rorschach, Switzerland, 2020; Available online: https://www.regatron.com/assets/resources/Documents/Technical-Datasheets/TC.ACS/DS_TC.ACS.50.528.4WR.S.LC_EN_230414.pdf (accessed on 12 September 2023).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Steady-State Error Criterion [%] | |
|---|---|
| 2 | ≈4 |
| 1 | ≈4.6 |
| 0.5 | ≈5.3 |
| Analytical | Estimated from Step Response | Deviation (abs) | Deviation (%) | |
|---|---|---|---|---|
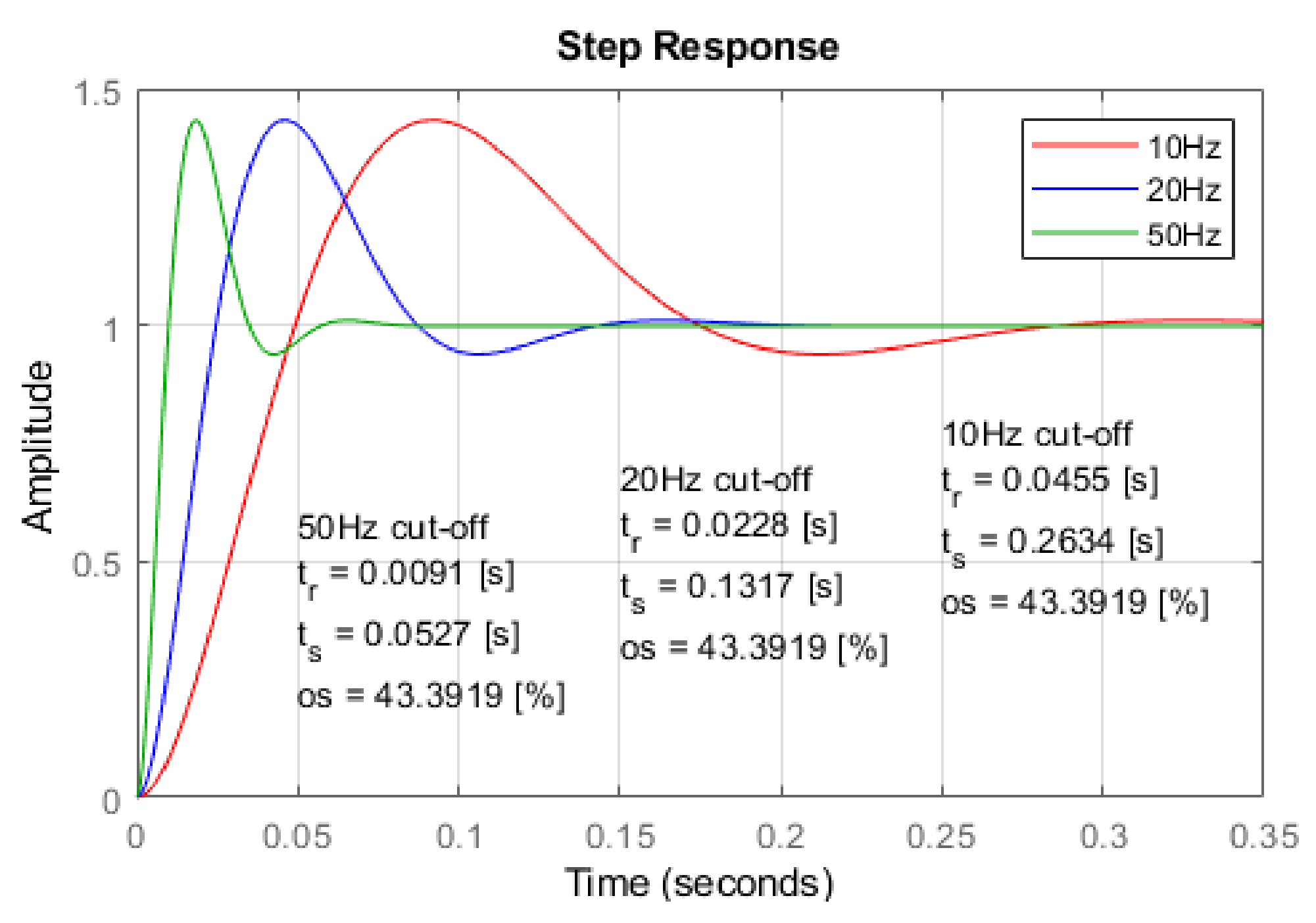
| Rise Time (s) | 0.0247 | 0.0228 | 19 × 10−4 | 7.7 |
| Settling Time (s) | 0.1313 | 0.1317 | 4 × 10−4 | 0.3 |
| Overshoot (%) | 43 | 43.3919 | 0.4 | 0.93 |
| Backward Euler | Forward Euler | Tustin |
|---|---|---|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iov, F.; Zhao, W.; Kerekes, T. Robust PLL-Based Grid Synchronization and Frequency Monitoring. Energies 2023, 16, 6856. https://doi.org/10.3390/en16196856
Iov F, Zhao W, Kerekes T. Robust PLL-Based Grid Synchronization and Frequency Monitoring. Energies. 2023; 16(19):6856. https://doi.org/10.3390/en16196856
Chicago/Turabian StyleIov, Florin, Weihao Zhao, and Tamas Kerekes. 2023. "Robust PLL-Based Grid Synchronization and Frequency Monitoring" Energies 16, no. 19: 6856. https://doi.org/10.3390/en16196856
APA StyleIov, F., Zhao, W., & Kerekes, T. (2023). Robust PLL-Based Grid Synchronization and Frequency Monitoring. Energies, 16(19), 6856. https://doi.org/10.3390/en16196856