


Water-Cut Measurement Techniques in Oil Production and Processing—A Review

Abstract
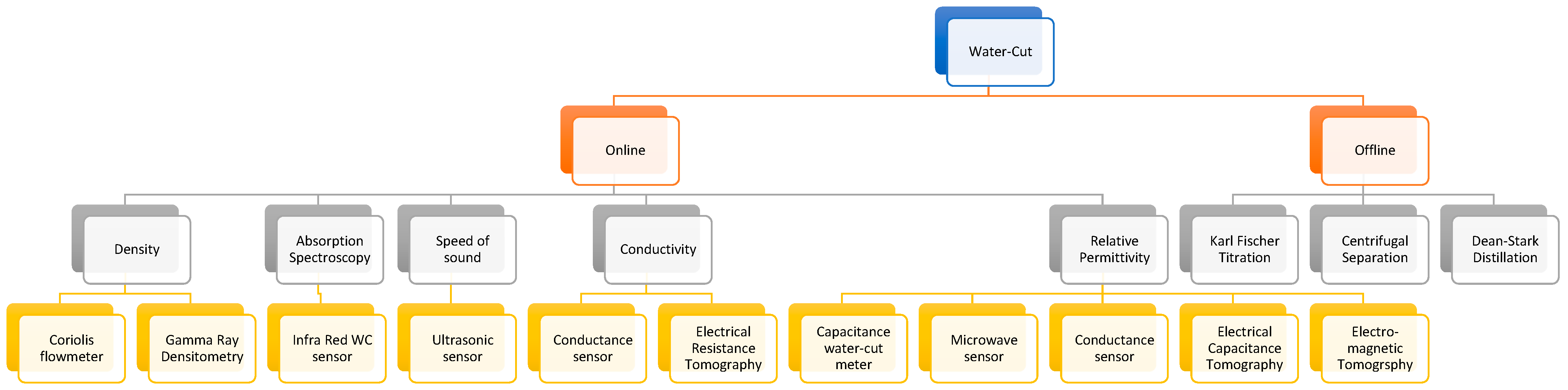
:1. Introduction
2. Online Methods
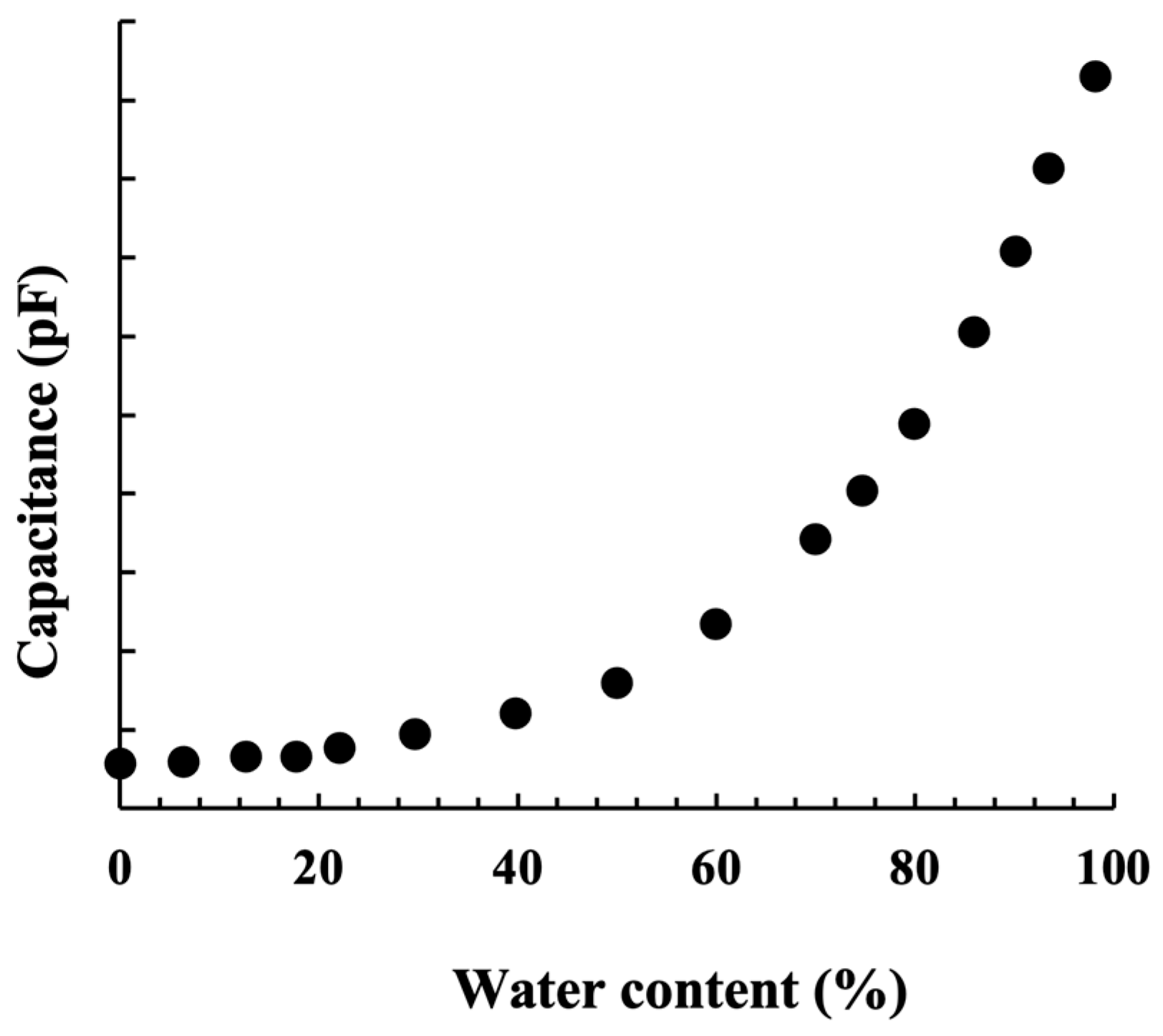
2.1. Capacitance-Based Water-Cut Meters
2.1.1. Coaxial Capacitance Sensor (In-Contact)
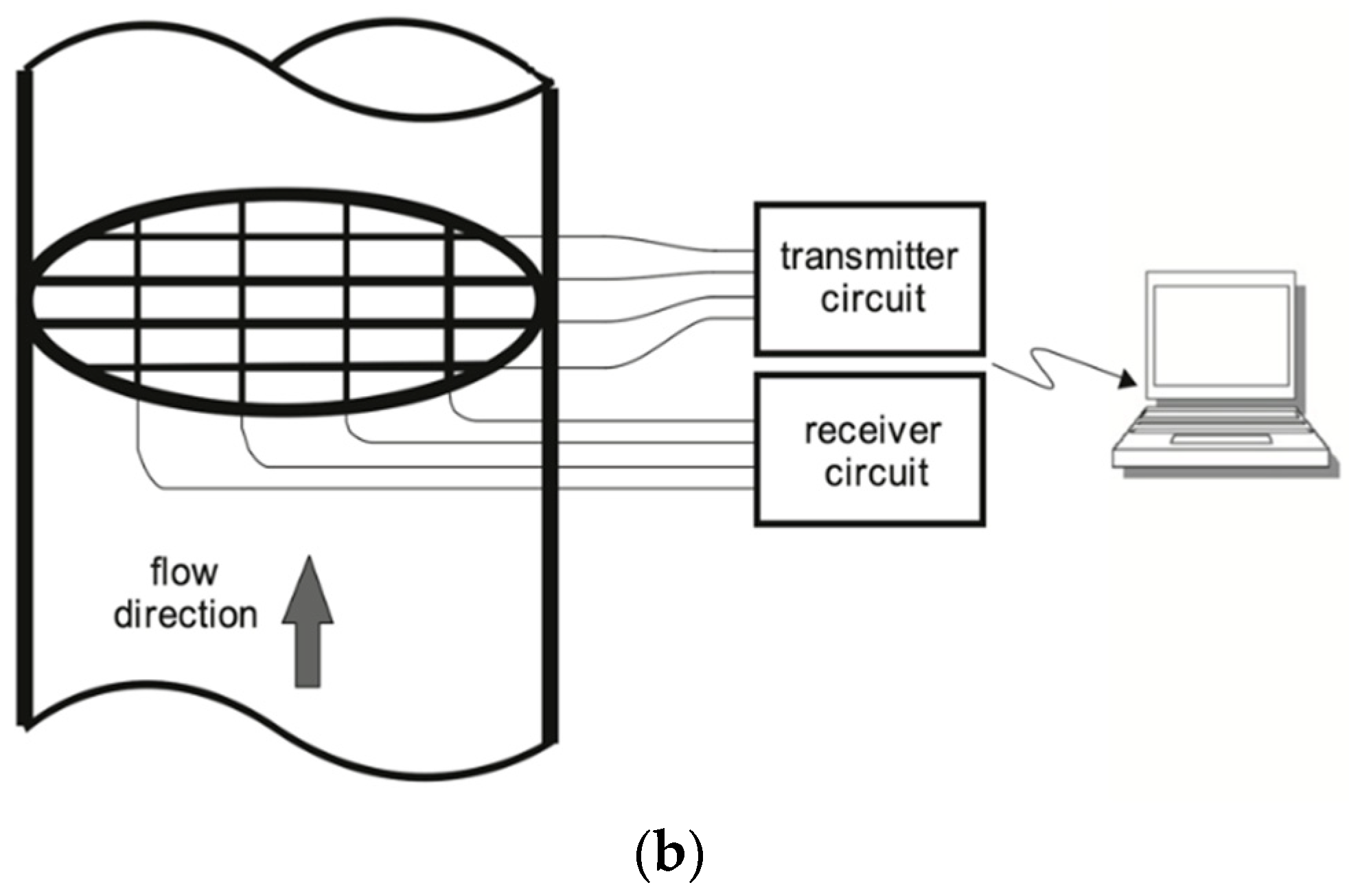
2.1.2. Capacitance Wire Mesh Sensor (In-Contact)
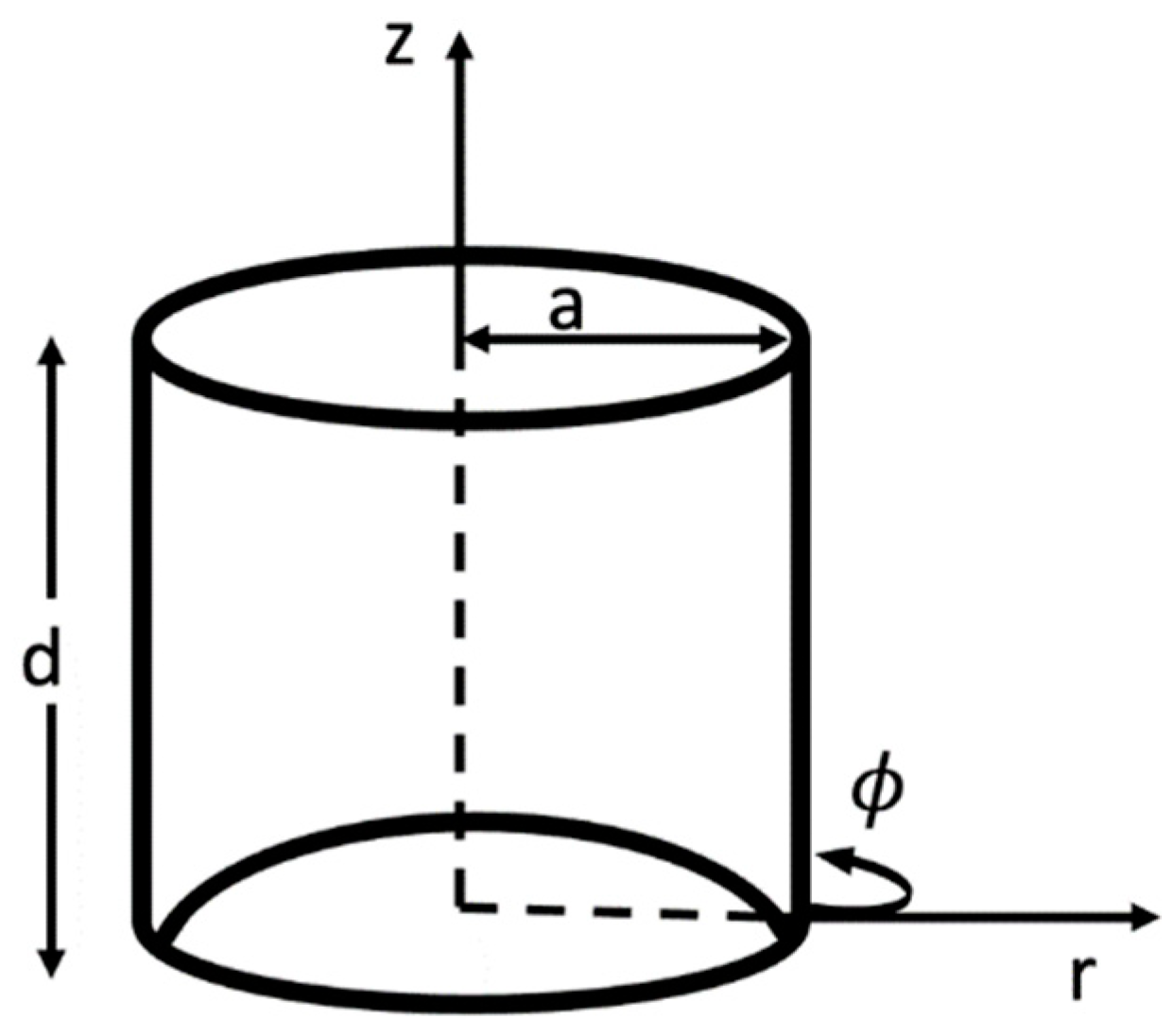
2.1.3. Principle of the Cylindrical Capacitance Sensor (Non-Contact)
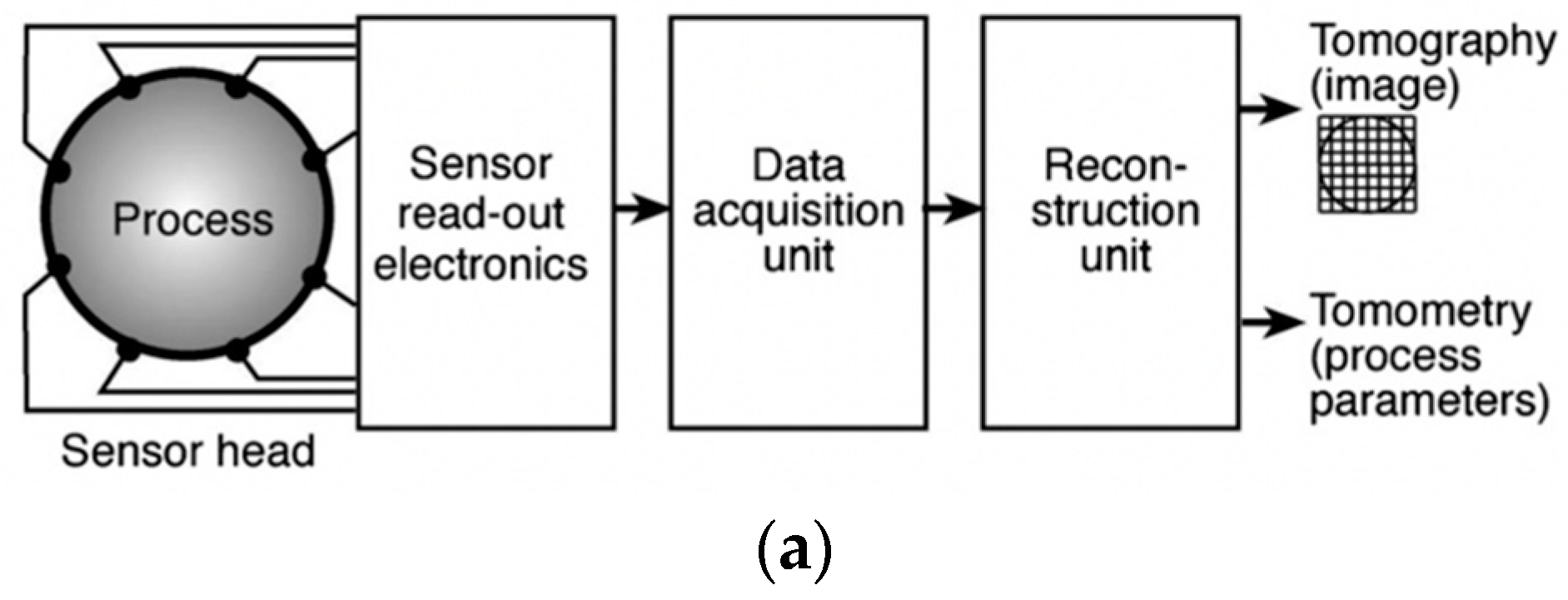
2.2. Tomography-Based Water-Cut Meters
2.2.1. Electrical Capacitance Tomography (ECT)
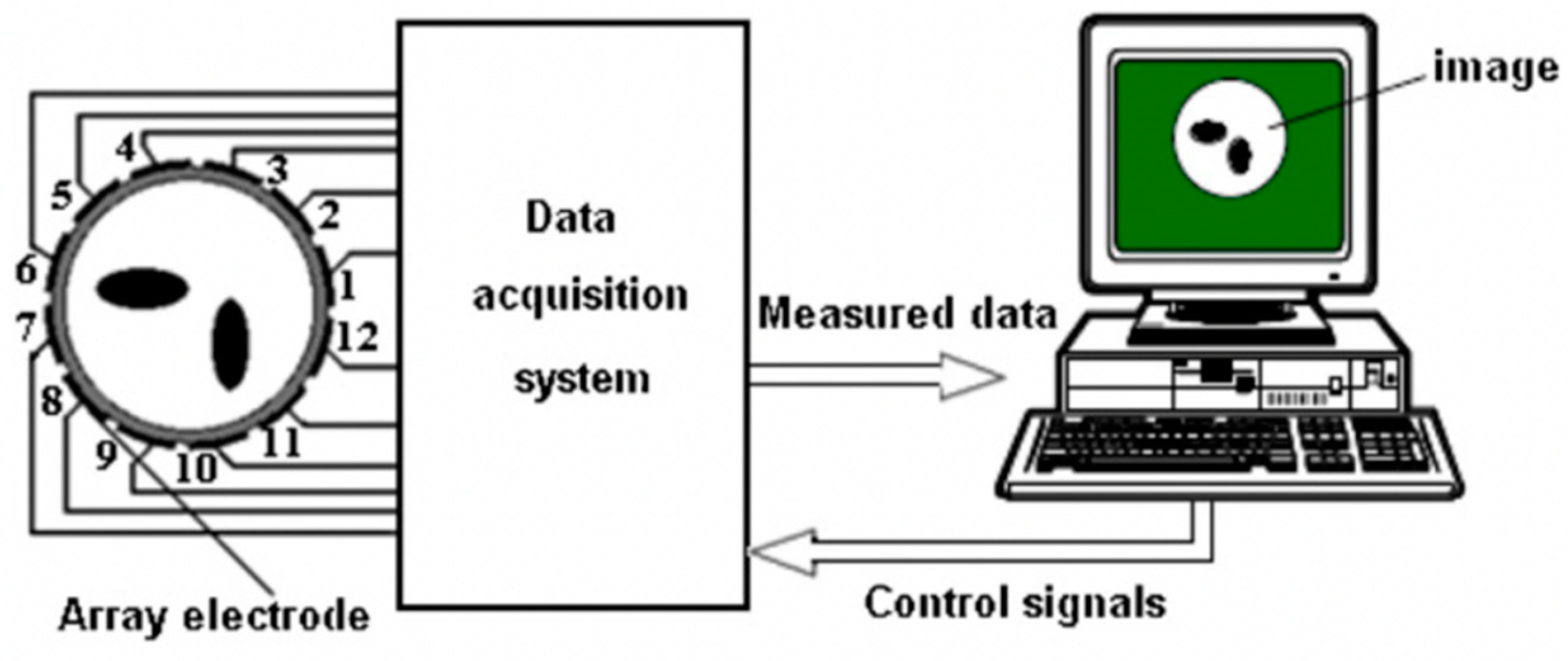
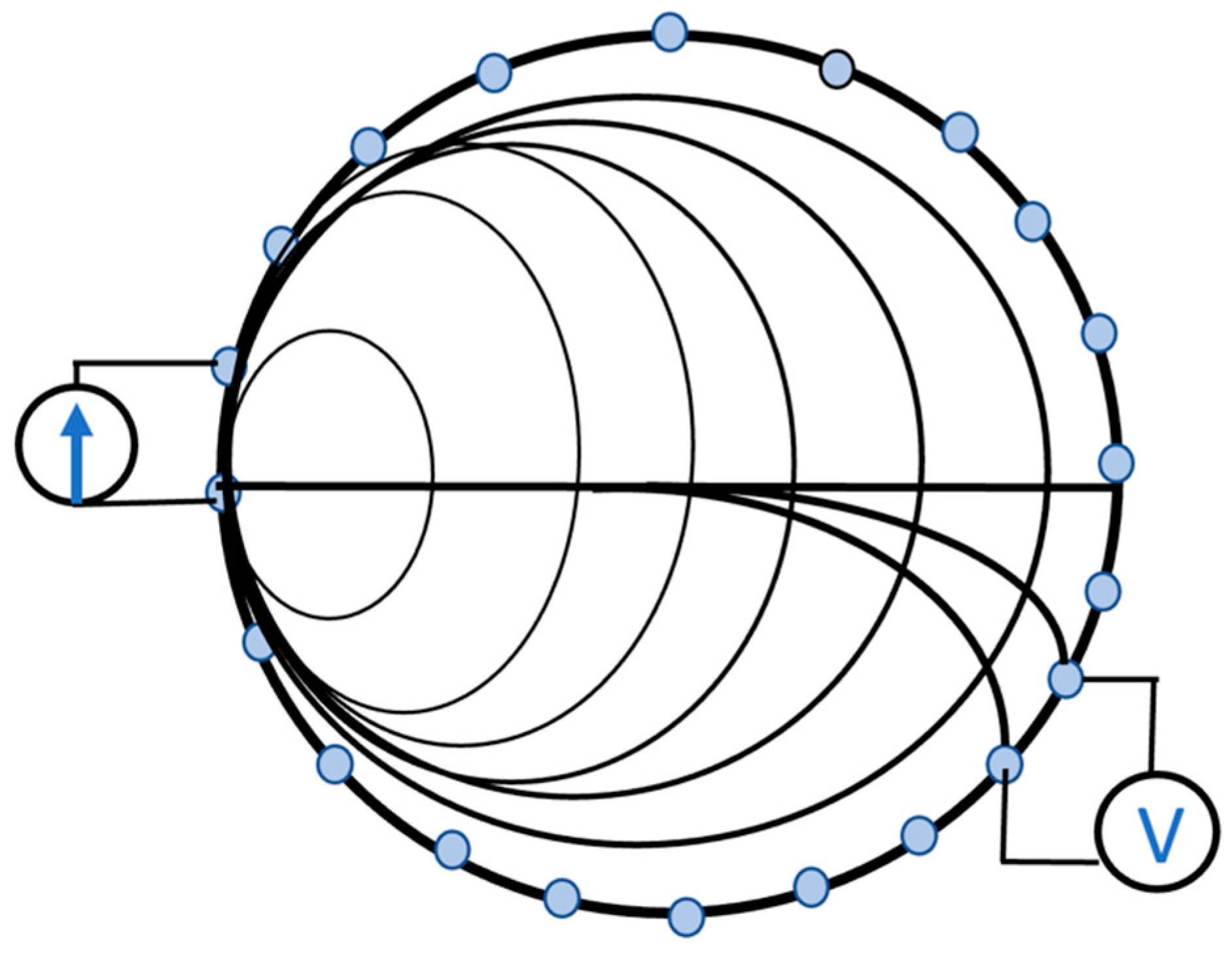
2.2.2. Electrical Resistance Tomography (ERT)
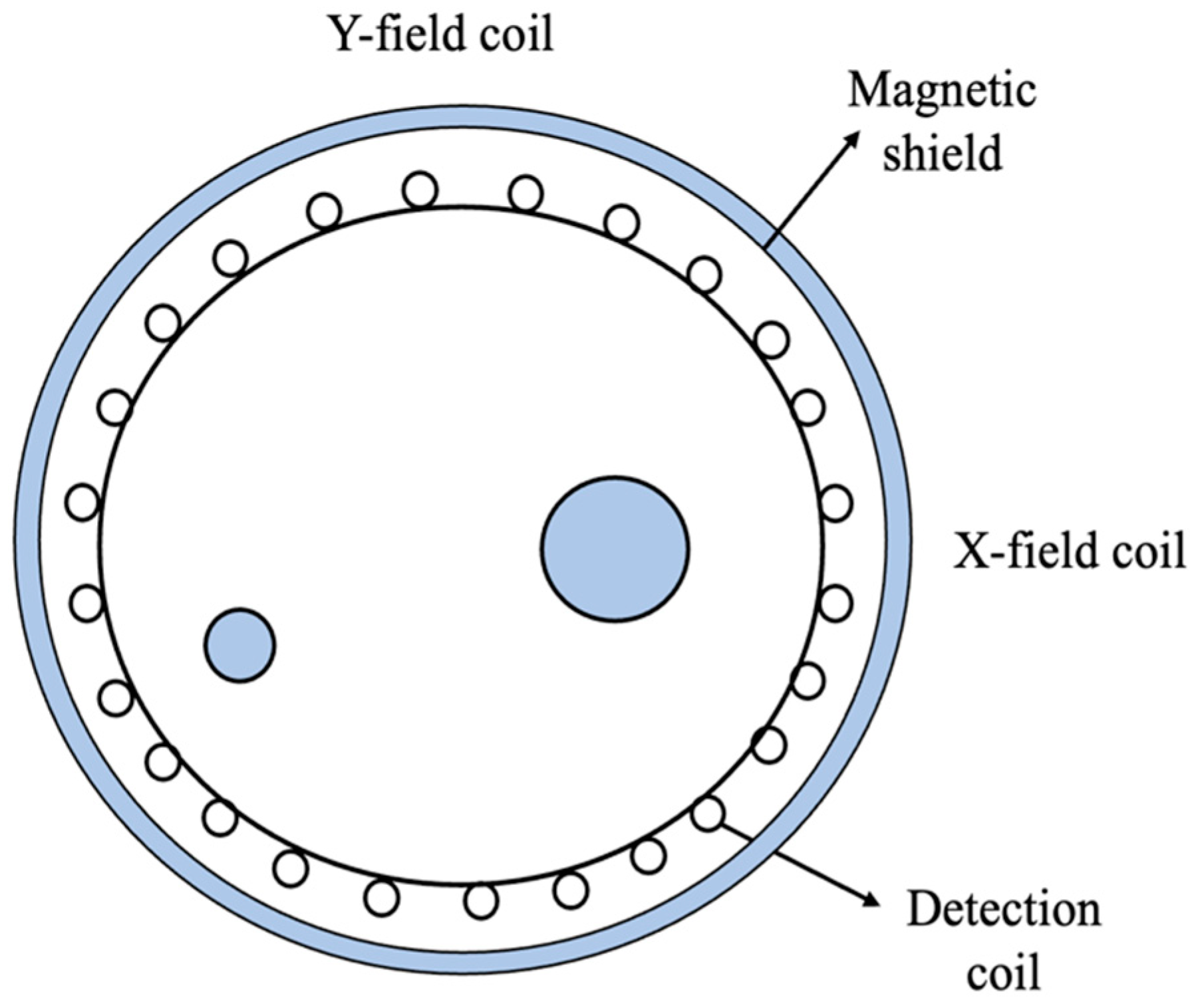
2.2.3. Electromagnetic Tomography (EMT)
2.3. Gamma Densitometry
2.4. Infrared Water-Cut Meter
2.5. Coriolis Flowmeter
2.6. Ultrasonic Water-Cut Meters
Transit Time Method
2.7. Microwave Sensor
2.7.1. Microwave Resonator
Resonant Cavity Sensor
2.7.2. Transmission Sensors
2.7.3. Reflection Sensors
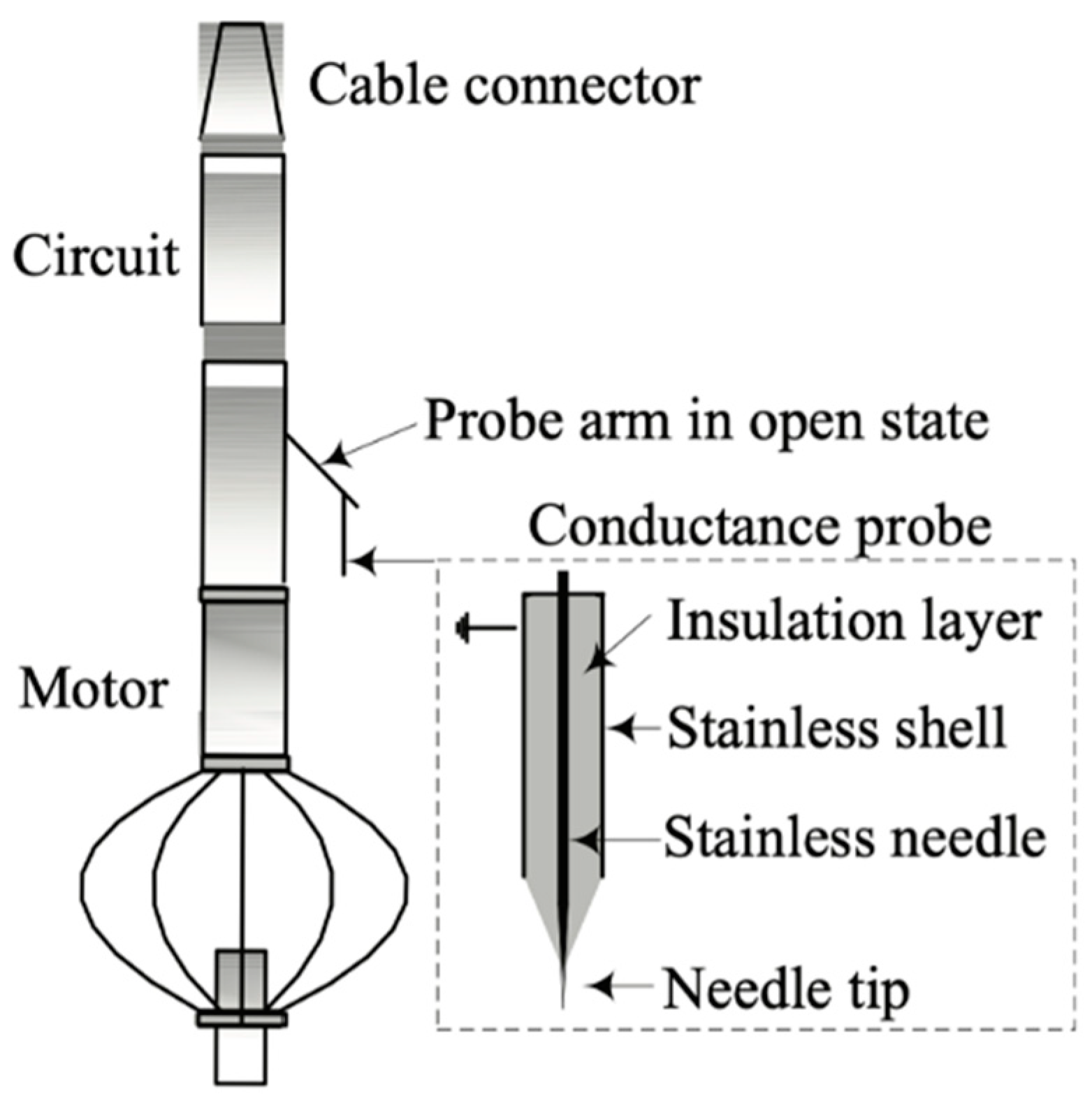
2.8. Conductance Method
3. Laboratory Offline Methods
3.1. Karl Fisher Titration
3.1.1. Volumetric Karl Fischer Titration
3.1.2. Coulometric Karl Fischer Titration
3.2. Dean-Stark Distillation
3.3. Centrifugal Separation
4. Summary of Water-Cut Measurement Techniques
5. Trends and Future Research Developments
5.1. Computer Vision
5.2. Artificial Intelligence in Oil and Gas
5.3. Soft Computing
5.4. Metamaterial THz EIT-like Sensor
5.5. All Optical Detection
5.6. Nuclear Magnetic Resonance (NMR)
5.7. Intensifying Device (ID) in Mobile Well Production Treatment Units
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, Y.; Xu, Y.; Yuan, C.; Wang, J.; Wu, H.; Zhang, T. Water cut measurement of oil–water two-phase flow in the resonant cavity sensor based on analytical field solution method. Measurement 2021, 174, 109078. [Google Scholar] [CrossRef]
- Guowang, G.; Dasen, H.; Hua, L.; Wang, F.; Li, Y. Research Status and Development Trend of Water Cut Detection Methods for Crude Oil. J. Phys. Conf. Ser. 2021, 1894, 012093. [Google Scholar] [CrossRef]
- Liu, Q.; Chu, B.; Peng, J.; Tang, S. A visual measurement of water content of crude oil based on image grayscale accumulated value difference. Sensors 2019, 19, 2963. [Google Scholar] [CrossRef] [PubMed]
- Sharma, P.; Lao, L.; Falcone, G. A microwave cavity resonator sensor for water-in-oil measurements. Sens. Actuators B Chem. 2018, 262, 200–210. [Google Scholar] [CrossRef]
- Yan, Y.; Wang, L.; Wang, T.; Wang, X.; Hu, Y.; Duan, Q. Application of soft computing techniques to multiphase flow measurement: A review. Flow. Meas. Instrum. 2018, 60, 30–43. [Google Scholar] [CrossRef]
- Ametek Drexelbrook. What Criteria to Consider in Selecting a Water Cut Monitor Known as Basic Sediment and Water Meter (BS&W). Available online: https://escventura.com/manuals/ref_bswWaterCut_an.pdf (accessed on 2 October 2022).
- Castrup, S. Comprehensive Analysis of Water Cut Metering Accuracies. In Proceedings of the SPE Western Regional Meeting, Virtual, 20–22 April 2021. [Google Scholar]
- Yurish, S.Y. Advances in Measurements and Instrumentation: Reviews Book Series; IFSA Publishing, S.L.: Barcelona, Spain, 2018; Volume 1, pp. 152–153. [Google Scholar]
- Kong, W.; Li, H.; Xing, G.; Kong, L.; Li, L.; Wang, M. A Novel Combined Conductance Sensor for Water Cut Measurement of Low-Velocity Oil-Water Flow in Horizontal and Slightly Inclined Pipes. IEEE Access 2019, 7, 182734–182757. [Google Scholar] [CrossRef]
- ZelenTech. How to Select a Watercut Monitor. 2011. Available online: https://www.zelentech.co/blog/posts/how-to-select-a-watercut-monitor/ (accessed on 6 August 2022).
- Liu, X.; Qiang, X.; Qiao, H.; Ma, G.; Xiong, J.; Qiao, Z. A theoretical model for a capacitance tool and its application to production logging. Flow. Meas. Instrum. 1998, 9, 249–257. [Google Scholar] [CrossRef]
- Golnabi, H.; Azimi, P. Design and Performance of a Cylindrical Capacitive Sensor to Monitor the Electrical Properties. J. Appl. Sci. 2008, 8, 1699–1705. [Google Scholar] [CrossRef]
- Li, L.; Kong, L.; Xie, B.; Fang, X.; Kong, W.; Liu, X.; Wang, Y.; Zhao, F. The Influence on Response of a Combined Capacitance Sensor in Horizontal Oil–Water Two-Phase Flow. Appl. Sci. 2019, 9, 346. [Google Scholar] [CrossRef]
- Da Silva, M.J.; Hampel, U. Capacitance wire-mesh sensor applied for the visualization of three-phase gas-liquid-liquid flows. Flow. Meas. Instrum. 2013, 34, 113–117. [Google Scholar] [CrossRef]
- Da Silva, M.J.; Schleicher, E.; Hampel, U. Capacitance wire-mesh sensor for fast measurement of phase fraction distributions. Meas. Sci. Technol. 2007, 18, 2245–2251. [Google Scholar] [CrossRef]
- Assima, G.P.; Larachi, F.; Schleicher, E.; Schubert, M. Capacitance wire mesh imaging of bubbly flows for offshore treatment applications. Flow. Meas. Instrum. 2015, 45, 298–307. [Google Scholar] [CrossRef]
- Liu, X.; Hu, J.; Xu, W.; Xu, L.; Xie, Z.; Li, Y. A new cylindrical capacitance sensor for measurement of water cut in a low-production horizontal well. J. Phys. Conf. Ser. 2009, 147, 012002. [Google Scholar] [CrossRef]
- Reinecke, N.; Petritsch, G.; Schmitz, D.; Mewes, D. Tomographic Measurement Techniques - Visualization of Multiphase Flows. Chem. Eng. Technol. 1998, 21, 7–18. [Google Scholar] [CrossRef]
- Ismail, I.; Gamio, J.C.; Bukhari, S.F.A.; Yang, W.Q. Tomography for multi-phase flow measurement in the oil industry. Flow. Meas. Instrum. 2005, 16, 145–155. [Google Scholar] [CrossRef]
- Thorn, R.; Johansen, G.A.; Hjertaker, B.T. Three-phase flow measurement in the petroleum industry. Meas. Sci. Technol. 2013, 24, 012003. [Google Scholar] [CrossRef]
- York, T. Status of electrical tomography in industrial applications. J. Electron. Imaging 2001, 10, 608. [Google Scholar] [CrossRef]
- Wang, H.X.; Zhang, L.F. Identification of two-phase flow regimes based on support vector machine and electrical capacitance tomography. Meas. Sci. Technol. 2009, 20, 114007. [Google Scholar] [CrossRef]
- Li, Y.; Yang, W.; Xie, C.-G.; Huang, S.; Wu, Z.; Tsamakis, D.; Lenn, C. Gas/oil/water flow measurement by electrical capacitance tomography. Meas. Sci. Technol. 2013, 24, 074001. [Google Scholar] [CrossRef]
- Hansen, L.S.; Pedersen, S.; Durdevic, P. Multi-Phase Flow Metering in Offshore Oil and Gas Transportation Pipelines: Trends and Perspectives. Sensors 2019, 19, 2184. [Google Scholar] [CrossRef]
- Sætre, C.; Johansen, G.A.; Tjugum, S.A. Salinity and flow regime independent multiphase flow measurements. Flow Meas. Instrum. 2010, 21, 454–461. [Google Scholar] [CrossRef]
- Kumara, W.A.S.; Halvorsen, B.M.; Melaaen, M.C. Single-beam gamma densitometry measurements of oil-water flow in horizontal and slightly inclined pipes. Int. J. Multiph. Flow 2010, 36, 467–480. [Google Scholar] [CrossRef]
- Arubi, I.M.T. Multiphase Flow Measurement Using Gamma-Based Techniques. Ph.D. Thesis, Cranfield University, Cranfield, UK, 2011. [Google Scholar]
- Blaney, S.; Yeung, H. Investigation of the exploitation of a fast-sampling single gamma densitometer and pattern recognition to resolve the superficial phase velocities and liquid phase water cut of vertically upward multiphase flows. Flow Meas. Instrum. 2008, 19, 57–66. [Google Scholar] [CrossRef]
- Nassereddin, T.A.; Al Hagin, K.; Hariz, M.; Melo, M.; Raman, B.; Helal, R. Infra-red Water Cut Meter Field Trial under Transient Conditions. In Proceedings of the Abu Dhabi International Petroleum Exhibition and Conference, Abu Dhabi, United Arab Emirates, 1–4 November 2010; SPE: Abu Dhabi, United Arab Emirates, 2010. [Google Scholar]
- Busaidi, K.; Haridas, B. High-Water Cut: Experience and Assessment in PDO. In Proceedings of the SPE Annual Technical Conference and Exhibition, Denver, CO, USA, 5–8 October 2003. [Google Scholar]
- Arsalan, M.; Ahmad, T.J.; Black, M.J.; Noui-Mehidi, M.N. Challenges of Permanent Downhole Water Cut Measurement in Multilateral Wells. In Proceedings of the Abu Dhabi International Petroleum Exhibition and Conference, Abu Dhabi, United Arab Emirates, 9–12 November 2015; SPE: Abu Dhabi, United Arab Emirates, 2015. [Google Scholar]
- Weatherford. Red Eye ® Multiphase Water-Cut Meter Water-Cut Measurements in Multiphase Flow. 2008. Available online: https://skyeye.ca/wp-content/uploads/2013/11/6190_Red_Eye_Multiphase_Water-Cut_Meter.pdf (accessed on 1 October 2021).
- Al-Saiyed, M.A.-R.; Warsi, S.A.U.H.; Phillips, J.E.; Gilani, S.K.M.; Zareef, M.A.; Lievois, J.S. Measurement of Water Cut in Challenging Flow Conditions using Infrared Technology. In Proceedings of the Abu Dhabi International Petroleum Exhibition and Conference, OnePetro, Abu Dhabi, United Arab Emirates, 3–6 November 2008. [Google Scholar]
- Brady, J.L.; Igbokwe, C.; Montague, S.; Warren, M.; Stadnicky, N.; Linder, M.; Hall, A.; Mehdizadeh, P.; Roberts, B.; Lievois, J.S.; et al. Performance of Multiphase Flowmeter and Continuous Water-Cut Monitoring Devices in North Slope, Alaska. In Proceedings of the SPE Annual Technical Conference and Exhibition, OnePetro, New Orleans, LA, USA, 30 September–2 October 2013. [Google Scholar]
- Patrick Henry, M.; Tombs, M.S.; Zhou, F.; Zamora, M.E. Three-phase flow measurement using Coriolis mass flow metering. In Proceedings of the 16th International Flow Measurement Conference, Paris, France, 24–26 September 2013. [Google Scholar]
- Al-Amri, M.A.; Al-Khelaiwi, F.T.; Al-Kadem, M.S. Advanced Utilization of Downhole Sensors for Water-cut and Flow Rate Allocation. In Proceedings of the Abu Dhabi International Petroleum Conference and Exhibition, OnePetro, Abu Dhabi, United Arab Emirates, 11–14 November 2012. [Google Scholar]
- Weinstein, J. Multiphase Flow in Coriolis Mass Flow Meters-Error Sources and Best Practices. In Proceedings of the 28th International North Sea Flow Measurement Workshop, St. Andrews, UK, 26–29 October 2010; Available online: https://nfogm.no/wp-content/uploads/2019/02/2010-17-Multiphase-Flow-in-Coriolis-Mass-Flow-Meters-%E2%80%93-Error-Sources-and-Best-Practices-Weinstein-Emerson.pdf (accessed on 1 October 2021).
- Li, M.; Henry, M.; Zhou, F.; Tombs, M. Two-phase flow experiments with Coriolis Mass Flow Metering using complex signal processing. Flow Meas. Instrum. 2019, 69, 101613. [Google Scholar] [CrossRef]
- Henry, M.; Tombs, M.; Zamora, M.; Zhou, F. Coriolis mass flow metering for three-phase flow: A case study. Flow Meas. Instrum. 2013, 30, 112–122. [Google Scholar] [CrossRef]
- Henry, M.; Tombs, M.; Duta, M.; Zhou, F.; Mercado, R.; Kenyery, F.; Shen, J.; Morles, M.; Garcia, C.; Langansan, R. Two-phase flow metering of heavy oil using a Coriolis mass flow meter: A case study. Flow Meas. Instrum. 2006, 17, 399–413. [Google Scholar] [CrossRef]
- Al-Khamis, M.N.; Al-Nojaim, A.A.; Al-Marhoun, M.A. Performance evaluation of coriolis mass flowmeters. J. Energy Resour. Technol. Trans. ASME 2002, 124, 90–94. [Google Scholar] [CrossRef]
- O’Banion, T. Coriolis: The Direct Approach to Mass Flow Measurement. In Chemical Engineering Progress; AIChE: New York, NY, USA, 2013; pp. 41–46. Available online: https://www.emerson.com/documents/automation/article-direct-approach-to-mass-flow-measurement-micro-motion-en-64236.pdf (accessed on 1 October 2021).
- Chaudhuri, A.; Sinha, D.N.; Zalte, A.; Pereyra, E.; Webb, C.; Gonzalez, M. Mass fraction measurements in controlled oil-water flows using noninvasive ultrasonic sensors. J. Fluids Eng. Trans. ASME 2014, 136, 031304. [Google Scholar] [CrossRef]
- Hamouda, A.; Manck, O.; Hafiane, M.; Bouguechal, N.-E. An Enhanced Technique for Ultrasonic Flow Metering Featuring Very Low Jitter and Offset. Sensors 2016, 16, 1008. [Google Scholar] [CrossRef]
- Figueiredo, M.M.F.; Goncalves, J.L.; Nakashima, A.M.V.; Fileti, A.M.F.; Carvalho, R.D.M. The use of an ultrasonic technique and neural networks for identification of the flow pattern and measurement of the gas volume fraction in multiphase flows. Exp. Therm. Fluid Sci. 2016, 70, 29–50. [Google Scholar] [CrossRef]
- Liu, W.; Tan, C.; Dong, X.; Dong, F.; Murai, Y. Dispersed Oil-Water Two-Phase Flow Measurement Based on Pulse-Wave Ultrasonic Doppler Coupled with Electrical Sensors. IEEE Trans. Instrum. Meas. 2018, 67, 2129–2142. [Google Scholar] [CrossRef]
- Chaudhuri, A.; Osterhoudt, C.F.; Sinha, D.N. An algorithm for determining volume fractions in two-phase liquid flows by measuring sound speed. J. Fluids Eng. Trans. ASME 2012, 134, 101301. [Google Scholar] [CrossRef]
- Chaudhuri, A.; Osterhoudt, C.F.; Sinha, D.N. Determination of Volume Fractions in a Two-Phase Flows From Sound Speed Measurement. In Proceedings of the ASME 2012 Noise Control and Acoustics Division Conference, American Society of Mechanical Engineers, New York, NY, USA, 19–22 August 2012; pp. 559–567. [Google Scholar]
- Global Electronic Services. Advantages and Disadvantages of Ultrasonic Flowmeter. Available online: https://gesrepair.com/ultrasonic-flow-meter-advantages-disadvantages/ (accessed on 1 October 2021).
- Yuan, C.; Bowler, A.; Davies, J.G.; Hewakandamby, B.; Dimitrakis, G. Optimised mode selection in electromagnetic sensors for real time, continuous and in-situ monitoring of water cut in multi-phase flow systems. Sens. Actuators B Chem. 2019, 298, 126886. [Google Scholar] [CrossRef]
- Al-Kizwini, M.A.; Wylie, S.R.; Al-Khafaji, D.A.; Al-Shamma’a, A.I. The monitoring of the two phase flow-annular flow type regime using microwave sensor technique. Measurement 2013, 46, 45–51. [Google Scholar] [CrossRef]
- Zhao, C.; Wu, G.; Li, Y. Measurement of water content of oil-water two-phase flows using dual-frequency microwave method in combination with deep neural network. Measurement 2019, 131, 92–99. [Google Scholar] [CrossRef]
- Nyfors, E.; Vainikainen, P. Industrial Microwave Sensors—A Review. In Proceedings of the IEEE MTT-S International Microwave Symposium Digest, Boston, MA, USA, 10–14 July 1991; Volume 1, pp. 1009–1012. [Google Scholar]
- Liu, W.; Jin, N.; Wang, D.; Han, Y.; Ma, J. A parallel-wire microwave resonant sensor for measurement of water holdup in high water-cut oil-in-water flows. Flow Meas. Instrum. 2020, 74, 101760. [Google Scholar] [CrossRef]
- Guo, H.; Yao, L.; Huang, F. A cylindrical cavity sensor for liquid water content measurement. Sens. Actuators A Phys. 2016, 238, 133–139. [Google Scholar] [CrossRef]
- Zarifi, M.H.; Rahimi, M.; Daneshmand, M.; Thundat, T. Microwave ring resonator-based non-contact interface sensor for oil sands applications. Sens. Actuators B Chem. 2015, 224, 632–639. [Google Scholar] [CrossRef]
- Nyfors, E.G. Cylindrical Microwave Resonator Sensors for Measuring Materials Under Flow. Ph.D. Thesis, Helsinki University of Technology, Espoo, Finland, 2000. [Google Scholar]
- Wang, D.Y.; De Jin, N.; Zhai, L.S.; Ren, Y.Y. A novel online technique for water conductivity detection of vertical upward oil-gas-water pipe flow using conductance method. Meas. Sci. Technol. 2018, 29, 105302. [Google Scholar] [CrossRef]
- Weihang, K.; Lingfu, K.; Lei, L.; Xingbin, L.; Tao, C. The influence on response of axial rotation of a six-group local-conductance probe in horizontal oil-water two-phase flow. Meas. Sci. Technol. 2017, 28, 065104. [Google Scholar] [CrossRef]
- Liu, X.; Hu, J.; Shan, F.; Cai, B.; Su, X.; Chen, Q. Conductance sensor for measurement of the fluid water cut and flow rate in production wells. Chem. Eng. Commun. 2010, 197, 232–238. [Google Scholar] [CrossRef]
- Chen, J.; Xu, L.; Cao, Z.; Zhang, W.; Liu, X.; Hu, J. Water cut measurement of oil-water flow in vertical well by combining total flow rate and the response of a conductance probe. Meas. Sci. Technol. 2015, 26, 095306. [Google Scholar] [CrossRef]
- Jin, Y.; Zheng, X.; Chi, Y.; Ni, M.J. Experimental Study and Assessment of Different Measurement Methods of Water in Oil Sludge. Dry. Technol. 2014, 32, 251–257. [Google Scholar] [CrossRef]
- De Caro, C.A.; Aichert, A.; Walter, C.M. Efficient, precise and fast water determination by the Karl Fischer titration. Food Control 2001, 12, 431–436. [Google Scholar] [CrossRef]
- Kossakowska, A. Water Determination by Karl Fischer Titration. 2016. Available online: https://www.labicom.cz/cogwpspogd/uploads/2016/10/HYDRANAL-Seminar-2016_Praha_Brno.web_.pdf (accessed on 1 June 2022).
- Lucio, A. How It Works: The Karl Fischer Titration. 2013, pp. 1–7. Available online: https://chem.uiowa.edu/sites/chem.uiowa.edu/files/people/shaw/LUCIO%20GM%20KF-Titration%20March-2013.pdf (accessed on 1 June 2022).
- Levi, H. Volumetric Karl Fisher Titration. What’s That All About? 2011. Available online: https://www.scientificgear.com/blog/bid/55237/volumetric-karl-fisher-titration-what-s-that-all-about (accessed on 1 June 2022).
- Thomas, L. Advantages and Limitations of Karl Fischer Titration. 2019. Available online: https://www.news-medical.net/life-sciences/Advantages-and-Limitations-of-Karl-Fischer-Titration.aspx (accessed on 1 June 2022).
- Patil, M. Advantages and Disadvantages of Karl Fischer Titration. 2021. Available online: https://chrominfo.blogspot.com/2020/09/Advantages-and-Disadvantages-of-Karl-Fischer-Titration.html (accessed on 1 June 2022).
- Veillet, S.; Tomao, V.; Visinoni, F.; Chemat, F. New and rapid analytical procedure for water content determination: Microwave accelerated Dean-Stark. Anal. Chim. Acta 2009, 632, 203–207. [Google Scholar] [CrossRef] [PubMed]
- Kazak, E.S.; Kazak, A.V. A novel laboratory method for reliable water content determination of shale reservoir rocks. J. Pet. Sci. Eng. 2019, 183, 106301. [Google Scholar] [CrossRef]
- American Petroleum Institute. Recommended Practices for Core Analysis. API Publ. Serv. 1998, 4, 7–11. Available online: http://w3.energistics.org/RP40/rp40.pdf (accessed on 25 June 2022).
- Mohajer, K. Determining Moisture Content in Crude Oil: Karl Fischer vs. Distillation vs. Centrifuge. Available online: https://www.kam.com/wp-content/uploads/2019/07/white-paper-determining-moisture-content-crude-oil.pdf (accessed on 25 June 2022).
- Tom, G. How to Accurately Measure Water in Crude Oil and Why Is It So Important. 2020. Available online: https://www.petro-online.com/news/analytical-instrumentation/11/ech-scientific/how-to-accurately-measure-water-in-crude-oil-and-why-is-it-so-important/53682 (accessed on 1 June 2022).
- De Alencar, A.L.S.; Fernandes, V.C.S.; De Amorim, M.B.; Costa, K.C.D.O.; Ferreira, A.L.D.S.; De Oliveira, E.C. Quality versus economical aspects in determination of water in crude oils: Centrifuge method or potentiometric Karl Fischer titration. Pet. Sci. Technol. 2016, 34, 287–294. [Google Scholar] [CrossRef]
- Li, H.; Yu, H.; Cao, N.; Tian, H.; Cheng, S. Applications of Artificial Intelligence in Oil and Gas Development. Arch. Comput. Methods Eng. 2021, 28, 937–949. [Google Scholar] [CrossRef]
- Song, Y.; Zhan, H.; Jiang, C.; Zhao, K.; Zhu, J.; Chen, R.; Hao, S.; Yue, W. High Water Content Prediction of Oil-Water Emulsions Based on Terahertz Electromagnetically Induced Transparency-like Metamaterial. ACS Omega 2019, 4, 1810–1815. [Google Scholar] [CrossRef]
- Lu, Z.Q.; Yang, X.; Zhao, K.; Wei, J.X.; Jin, W.J.; Jiang, C.; Zhao, L.J. Non-contact measurement of the water content in crude oil with all-optical detection. Energy Fuels 2015, 29, 2919–2922. [Google Scholar] [CrossRef]
- O’Neill, K.T.; Brancato, L.; Stanwix, P.L.; Fridjonsson, E.O.; Johns, M.L. Two-phase oil/water flow measurement using an Earth’s field nuclear magnetic resonance flow meter. Chem. Eng. Sci. 2019, 202, 222–237. [Google Scholar] [CrossRef]
- Bryan, J.L.; Manalo, F.P.; Wen, Y.; Kantzas, A. Advances in Heavy Oil and Water Property Measurements Using Low Field Nuclear Magnetic Resonance. In Proceedings of the SPE International Thermal Operations and Heavy Oil Symposium and International Horizontal Well Technology Conference, SPE, Calgary, AB, Canada, 4–7 November 2002; Volume 7, pp. 19–33. [Google Scholar]
- Cabrera, S.C.M.; Bryan, J.; Kantzas, A. Estimation of Bitumen and Solids Content in Fine Tailings Using Low-Field NMR Technique. J. Can. Pet. Technol. 2010, 49, 8–19. [Google Scholar] [CrossRef]
- Kleinberg, R.L.; Kenyon, B.; Straley, C.; Gubelin, G.; Morriss, C. Nuclear Magnetic Resonance Imaging-Technology for the 21st century. Oilfield Rev. 1995, 7, 19–33. [Google Scholar]
- Liu, J.; Feng, X.Y.; Wang, D.S. Determination of water content in crude oil emulsion by LF-NMR CPMG sequence. Pet. Sci. Technol. 2019, 37, 1123–1135. [Google Scholar] [CrossRef]
- Iravani, S. NMR Spectroscopic Analysis in Characterization of Crude Oil and Related Products. In Analytical Characterization Methods for Crude Oiland Related Products; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2017; pp. 125–140. [Google Scholar]
- Shafiei, M.; Kazemzadeh, Y.; Martyushev, D.A.; Dai, Z.; Riazi, M. Effect of chemicals on the phase and viscosity behavior of water in oil emulsions. Sci. Rep. 2023, 13, 4100. [Google Scholar] [CrossRef]
- Lekomtsev, A.V.; Ilyushin, P.Y.; Martyushev, D.A. Experience of Implementing an Intensifying Device on the Developed Mobile Well Production Treatment Unit. Chem. Pet. Eng. 2018, 54, 213–219. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coefficient | Urick Model | Kutser–Toksöv Model |
|---|---|---|
| Measurement Techniques | Range | Advantages | Limitations | Application |
|---|---|---|---|---|
| Capacitance-based water-cut meters [6,7] | 50–80% |
|
| Oil–water two-phase flow (petroleum industry) |
| Electrical Capacitance Tomography (ECT) [19,20,21,23] | <40% |
|
| Gas/oil flows in oil pipelines, gas/solid flows in pneumatic conveyors and gas/solid distribution in fluidized beds. |
| Electromagnetic Tomography (EMT) [19,24] | N/A |
|
| Multiphase flow in the offshore industry. |
| Electrical Resistance Tomography (ERT) [9,21,24] | >40% |
|
| Oil–water two-phase flow in vertical pipes. |
| Gamma Densitometry [26,27] | 0–100% |
|
| Gas hold-up, oil–water flow in horizontal and slightly inclined pipes. |
| Infrared water-cut meter [7,34] | 0–100% |
|
| Multi-phase flow in horizontal wells. |
| Coriolis flowmeter [6,7,42] | 0–100% |
|
| Monitoring density of catalyst in copolymer production. Monitoring TiO2 concentration in paper manufacturing; monitoring flowrates of chemicals (e.g., ethylene); petroleum industry. |
| Ultrasonic water-cut meter [7,43,44,49] | 0–100% |
|
| Oil–water emulsions. |
| Microwave sensor [9,50,51,52,56] | 0–100% |
|
| Multi-phase fluid flow in the oil industry. |
| Conductance sensor [58,61] | 0–100% |
|
| Oil–water two-phase flow; gas–liquid two-phase flow. |
| Karl Fischer titration [67,68] | 0.001–100% |
|
| Quality control in the pharmaceutical, food and chemical industries. |
| Dean–Stark distillation/Rotary Evaporator [69,71] | N/A |
|
| Water determination in herbs, spices, food, petroleum products and crude oil. |
| Centrifugal separation [72,74] | 0–100% |
|
| Secondary or tertiary production of crude oil. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kamal, B.; Abbasi, Z.; Hassanzadeh, H. Water-Cut Measurement Techniques in Oil Production and Processing—A Review. Energies 2023, 16, 6410. https://doi.org/10.3390/en16176410
Kamal B, Abbasi Z, Hassanzadeh H. Water-Cut Measurement Techniques in Oil Production and Processing—A Review. Energies. 2023; 16(17):6410. https://doi.org/10.3390/en16176410
Chicago/Turabian StyleKamal, Bushra, Zahra Abbasi, and Hassan Hassanzadeh. 2023. "Water-Cut Measurement Techniques in Oil Production and Processing—A Review" Energies 16, no. 17: 6410. https://doi.org/10.3390/en16176410
APA StyleKamal, B., Abbasi, Z., & Hassanzadeh, H. (2023). Water-Cut Measurement Techniques in Oil Production and Processing—A Review. Energies, 16(17), 6410. https://doi.org/10.3390/en16176410