2.1. Mathematical Models for Evaluating the Energy Efficiency of Vehicles
To compare different vehicles, it is convenient to use indicators that are dimensionless quantities or have the same units of measurement and areas of definition. Scientists have proposed various models for evaluating the energy efficiency of vehicles of given categories.
For example, in [
1,
14], energy efficiency indicators based on a system of correction coefficients were proposed. The table of the values of the specified coefficients is given in the work [
14]. The value of some applied correction coefficients, depending on the defined operating conditions, was obtained on the basis of [
15]. Other coefficients are determined using the method of expert evaluations with the involvement of employees of the state service “Ukrtransbezpeka” (Ukraine). The analytical models used in [
1,
14] to determine the level of energy efficiency (
LEE) are equivalent and only differ in the form of representation. The complex application of correction coefficients determines the relative increase in the fuel consumption of a vehicle under real operating conditions compared to the fuel consumption of a given vehicle under ideal operating conditions (1):
where
is the energy consumed by the engine under ideal operating conditions, MJ (determined according to the norms of fuel/energy consumption for a given vehicle model);
is the energy actually consumed by the engine, MJ;
is complex correction coefficient, %;
is
i-th correction factor that increases fuel consumption (1 ≤
i ≤
n), %; and
is
j-th correction factor that reduces fuel consumption (1 ≤
j ≤
m), %.
At the same time, driving on a horizontal road in moderate weather conditions is considered ideal operating conditions. Variants of vectors characterizing real operating conditions are defined for various links of the urban transport systems of Poland and Ukraine. The advantage of these dependencies is the possibility of their further clarification through the addition of the system of coefficients, taking into account the latest research in this direction. The obtained values of
LEE were used to evaluate the dynamics of its change according to the multiple regression model [
14] and the fuzzy inference model [
1]. These models take into account ten independent parameters of the transport system: vehicle category (q); vehicle power plant (q); vehicle age (q); the degree of load/passenger capacity use (n); the traffic flow complexity level (n); the road resistance degree (n); the carriageway curvature degree (q); the motorization level (q); the time interval (q); and the complexity of the weather conditions (n). Next to the parameter, the parameter type is indicated in brackets: q—qualitative, n—quantitative. However, these models are only adequate for evaluating the energy efficiency of vehicles with conventional power plants. Hydrogen vehicles were not considered in these works.
The authors of [
16] introduced indicators that take into account the variability of the operating conditions of vehicles of category N
3. These are the fuel consumption coefficient (2) and the sustainable fuel economy coefficient (3):
where
is the fuel consumption coefficient taking into account the traffic modes of the vehicle on the
i-th section of the
j-th trip (1 ≤
i ≤
n, 1 ≤
j ≤
m);
is the sustainable fuel economy coefficient for the
j-th trip;
is the actual fuel consumption on the
i-th route section of the
j-th trip, L/100 km;
is the fuel consumption rate for the
i-th section of the
j-th trip, L/100 km;
is the reduced fuel economy on the
i-th section of the
j-th trip, L/100 km; and
n is number of sections of the route.
Ref. [
16] also proposed an analytical dependence for determining the rate of fuel consumption
with the introduction of a total correction coefficient [
15], which takes into account the operating conditions of the vehicle. Despite the fact that formulas (2) and (3) were proposed for a vehicle of only one category, they can be applied to other vehicles, provided that the
indicator is adapted accordingly.
To evaluate the energy efficiency of commercial trucks (common lorries, dump trucks, semi-trailer trucks), the following indicator was used in work [
17]:
where
EE is the energy efficiency index, L/100 t∙km;
Q is the comprehensive fuel consumption, L/100 km; and
m is the rated load of the commercial truck, t.
This indicator is not universal. Its value is not a dimensionless quantity. This complicates its application in combination with energy efficiency indicators of other vehicle categories.
The problem of forming complex indicators of energy efficiency was considered in works [
18,
19,
20,
21]. Thus, in [
18,
19], the energy efficiency indicator (
Pe) of motor vehicles on the route is proposed:
where
Kvp is the energy coefficient of speed;
Kep is the energy coefficient of vehicle mileage;
γst is the load capacity utilization factor; and
ηq is the curb weight ratio, which represents the ratio of the vehicle’s own weight in the equipped state to the nominal load capacity.
The
Kvp and
Kep coefficients are calculated as weighted sums of the corresponding partial coefficients for different driving cycles. The partial energy coefficient of speed
Kv is the ratio of the average vehicle speed
Vavg in the test operation to the reference speed
Ve. The reference speed is taken as 40 km/h [
18]. The partial energy coefficient of the mileage
Ke is defined as the ratio of the actual fuel consumption in the test operation to the reference fuel consumption of the vehicle moving at a constant reference speed. The reference fuel consumption in [
20] is taken to be the lowest fuel consumption in a given route section during the working day. In work [
18], nonlinear models were also obtained for determining the specified partial coefficients. They take into account the average value of the road resistance coefficient on a given route, time (sec.) of the vehicle acceleration up to 60 km/h, the rate of fuel consumption, volumetric weight of fuel, vehicle load capacity, vehicle dimensions, and traffic conditions coefficient (1.1 for the urban cycle, 0.85 for the highway cycle). In [
19], the energy efficiency indicator
Pe depends on the model of the structural–parametric organization of the vehicle design. In addition, it will take into account the parameters of the road both as a rolling surface and as a communication channel in the implementation of the transport service.
The authors in [
20,
21] adapted the results of studies [
18,
19] for large-class buses. Thus, the evaluation of the energy efficiency
E2 of these buses takes the following form [
20]:
where
Q0 is reference fuel consumption of a large-class city bus on a given haul (route), L;
Vavg,
Ve is the average and reference speed of a large-class city bus on a given haul (route), respectively, km∙h
−1;
H,
Havg is the passenger load on the haul (route) and the average daily passenger load, respectively, pas.;
Lr is the length of haul (route), km;
γst is the bus passenger capacity utilization factor; and
ηq is the curb weight ratio.
In works [
20,
22], the evaluation of the mechanical efficiency of the drive system
E1(
Auseful,
E) is used as a function of the useful work performed (MJ) and the energy consumed (MJ):
where
is the useful work when passing the
j-th trip of the haul (route), MJ;
E is the consumed energy on the haul, MJ;
n is the number of root sections;
Pψ is the road resistance, N;
Pw is the air resistance, N;
Pjx is the inertial force of the vehicle, N; and
L is length of the haul (route), m.
Formula (7) is universal.
Pψ and
Pw depend on the value of the rolling resistance coefficient
f and the aerodynamic resistance coefficient
cx, respectively. The work in [
23,
24,
25,
26] is devoted to the study of the effect of air resistance on the fuel consumption of motor vehicles under specified operating conditions. In [
26], it was shown that at low speeds, the reduction of the rolling resistance has a greater effect on increasing the fuel economy of vehicles compared to reduction of the aerodynamic resistance coefficient. This conclusion is especially important when managing the energy efficiency of urban passenger transport. In general, the traffic route may contain curved segments. Therefore, in [
27], the authors studied the problem of determining the coefficient of rolling resistance when moving along a curved trajectory. They generalized the approaches of other scientists regarding the estimation of the rolling resistance coefficient during straight-line movement. They also proposed a nonlinear analytical dependence for determining the rolling resistance coefficient during the curvilinear movement of a two-axle car. The resulting increase in the coefficient of additional movement resistance has a positive correlation with the size of the tire contact patch, a negative correlation with the radius of curvature, and is given by a parabolic function. The parabola parameter depends on the characteristics of the installed tires.
Formula (7) for large-class diesel buses takes the following form [
20]:
where
V is the bus speed, m∙s
−1;
a is the bus acceleration, m∙s
−2;
F is the frontal area of the bus, m
2;
m0 is the curb weight of the bus, kg;
mp is the average mass of the passenger, kg;
H is the passenger capacity on the haul, pas.;
Havg is the average passenger capacity for the observation day, pas.;
g is the acceleration of free fall, m∙s
−2;
f is the coefficient of rolling resistance;
cx is the coefficient of aerodynamic resistance (for a large-class bus, we take 0,75 [
2]);
ρw is the air density, kg∙m
−3; and α is the angle of the road slope.
In work [
28], the energy efficiency of the vehicle is defined as the ratio between the maximum kinetic energy of the forward motion of the vehicle to the maximum effective power of the engine:
where
EW is the energy efficiency indicator, J/W (kJ/kW);
mt is the vehicle total mass, kg;
is the maximum speed, km/h; and
is the maximum engine power, kW.
In [
28], the method of determining
is presented. This method was tested on the example of passenger cars.
Section 3 provides generalized information on methods of evaluating the energy efficiency of trucks and passenger cars with the power plant options presented in the paper. Indicator (7) can be applied to all considered categories of vehicles with studied power plants. This indicator requires a preliminary determination of the energy/fuel consumption on a given route segment.
2.2. Fuel/Energy Consumption Models of Vehicles with Conventional and Alternative Power Plants
A significant share of the vehicle energy efficiency indicators, considered in
Section 2.1, requires the preliminary determination of energy/fuel consumption. For this, various mathematical models are used, including regression models [
29,
30,
31]. The main parameters in these models are speed and acceleration. At the National Transport University (Ukraine), a study was conducted [
29] and nonlinear regression equations were obtained according to the traffic modes: at steady motion (10) and in acceleration mode (11), (12).
where
QS is the fuel consumption at steady motion, g/km;
V is the vehicle speed, km/h; and
a,
b,
c,
d are the parameters defined for different vehicle categories (
Table 1).
Table 1 shows the following distribution of vehicles by category: M1, M2, M3 correspond to light vehicles. Categories N1, N2, N3 correspond to heavy-duty vehicles.
where
QR is the fuel consumption in acceleration mode, g/km; and
kR is the coefficient of influence of the acceleration mode on fuel consumption (12).
where
VR is the final acceleration speed of the vehicle, km/h; and
a,
b,
c,
d,
e are the regression coefficients determined for the studied categories of vehicles (
Table 2).
Table 3 shows the fuel consumption of the vehicles of the considered categories in idling mode.
The numerical values of the fuel consumption obtained by expressions (10) and (11) and from
Table 3 can be used to evaluate the energy efficiency of vehicles with conventional power plants.
According to Ahn et al. [
30], the factors affecting fuel consumption can be divided into six categories. The first category includes trip parameters, in particular the distance and number of trips in a given time period. The second category includes weather characteristics: temperature, humidity, and wind. The third category includes vehicle parameters: engine volume, engine condition, presence of a catalytic neutralizer, air conditioner modes, and others. The fourth category includes the road parameters: road slope and road surface roughness. The fifth category contains road traffic factors, such as the parameters of the interaction of vehicles with other vehicles and with control devices. The last category includes factors that take into account driving characteristics. The authors of [
30] give polynomials of the third degree for determining the logarithm of energy consumption depending on the acceleration ranges. Based on the work of [
30], Rakha et al. [
31] used the VT–Micro model in the form of an exponential dependence:
where
F(
t) is the instantaneous fuel consumption of the vehicle, L/s;
v(
t)
i is instantaneous speed, km/h;
a(
t)
j is instantaneous acceleration, m/s
2; and
Lij, Mij are regression coefficients [
30].
The work in [
31] also proved that the traffic intensity and the topological configuration of the transport network significantly affect the fuel consumption of motor vehicles.
According to the criterion of energy efficiency, public transport is more profitable than individual passenger transport. Works [
22,
32] studied the methods for estimating the fuel consumption of urban passenger transport.
The authors in [
22,
33,
34,
35] applied the
VSP method, taking into account the speed, acceleration of the vehicle, and the road gradient. In addition, MOVES 2010b was used by the authors in [
33] to estimate the fuel consumption of a bus and a passenger car. The
VSP method is implemented through the following stages: determination of the
VSP index, W/kg or m
2/s
3 according to formula (14); ranking of
VSP values; construction of the dependence of the
VSP index on time; determination of fuel consumption
q =
f(
VSP), g/s, based on statistical values of average daily fuel consumption; and determination of the total fuel consumption
Q (g) for a given driving cycle according to expression (15).
where
m is gross vehicle weight, kg; and
V is speed, m∙s
−1.
where
qi is the energy consumption rate for
i-th VSP range, g/s; and
ti is the time spent on
i-th VSP mode for a given driving cycle, s.
The fuel consumption values obtained using the VSP method take into account the stopping time and speed distribution on the bus route. However, the dynamics of changes in load on fuel consumption were not investigated in [
22]. This task was solved by the authors in [
32,
33]. To estimate the fuel consumption of a large-class bus, the nonlinear regression equations in the form of an exponent and a hyperbola (16) were obtained in work [
32]. These equations take into account the average daily load. The hyperbola showed a higher accuracy with an average relative standard deviation of 0.57%.
where
Qp is the daily specific fuel consumption, L∙(pass∙km)
−1; and
Havg is the average daily passenger load, pass.
Statistical data were collected during working days in February and March 2022. Therefore, the model needs to be calibrated for other periods of the year. In addition, it is necessary to take into account the increase in the load of city buses in the post-pandemic period.
The work in [
36] considers the advantages and limitations of three groups of fuel consumption models: white box, gray box, and black box (
Figure 1).
White box models require a deep understanding of the chemical and physical processes occurring in the engine and require a large number of parameters [
36]. Gray box models estimate vehicle fuel consumption under transient conditions. Such models perform the correction of fuel consumption in a stationary state using a correction function. The parameters of the correction function are engine speed, torque, and their increments. There are three groups of black box models (
Figure 1). These models are represented by regression models, the parameters of which are the dynamic characteristics of the engine (rotational frequency, torque), the dynamic characteristics of the vehicle (speed, acceleration) and the trip parameters. The models considered above (10)–(16) refer to black box models. The authors in [
36,
37,
38] presented mathematical models of the white box for gasoline and diesel vehicles, as well as for CNG vehicles. In the work [
37], a comprehensive modal model of the black box CMEM (Comprehensive Modal Emissions Model) was used to determine the fuel consumption of gasoline, diesel, and biodiesel vehicles. CMEM includes mathematical models (17) and (18).
where
FR is fuel consumption, g/s;
K is the engine friction coefficient (18);
N is the engine rotation speed, r/s;
V is the engine working volume, L;
P is the engine power, kW;
η is the efficiency coefficient (by default
η ≈ 0.45);
is the lowest heating value of combustion of fuel, kJ/g; and
;
b1 ≈ 10
−4.
where
k0 is the coefficient for a given category of vehicle, which takes into account the energy loss associated with engine friction per unit engine revolution and engine working volume, kJ/(rev.L) (the value of
k0 for individual vehicle categories is given in [
37]);
C ≈ 0.00125.
The authors in [
37,
39] also provided a formula for determining fuel consumption in the VISSIM, TRANSYT–7F, and SYNCHRO programs:
where
k1 = 0.075283 − 0.0015892
V + 0.000015066
V2;
k2 = 0.7329;
k3 = 0.0000061411
V2;
F is the fuel consumed, gal;
V is the cruise speed, mi/h;
TT is the total vehicle mileage, veh. × mi;
TD is the total signal delay, h; and
ST is the total stops, veh./h.
Formula (19) was used in studies [
37,
39] to estimate the fuel consumption of vehicles taking into account the operation of traffic lights at regulated intersections. Within the limits of these studies, it has been proven that the accuracy of fuel consumption modeling in VISSIM is lower than in CMEM.
Cachón et al. [
38] obtained a linear relationship between fuel consumption, speed, and the traction force of the CNG vehicle:
where
FC is the fuel consumption, g/s;
FCidle is the fuel consumption in an idle state, g/s;
SFCpower is the specific fuel consumption dependent on the power requirement;
v is the vehicle speed, m/s; and
F is the traction force, N.
Equation (20) can be used for various driving cycles, for example, in the simulation program developed in [
38].
The authors in [
17] proposed an equation for calculating the fuel consumption of common lorries, dump trucks, and semi-trailer trucks at a constant speed:
where
Q is the comprehensive fuel consumption, L/100 km;
is the corrected fuel consumption under
ith test speed and rated load, L/100 km; and
ki is the weight coefficient of
ith test speed (
Table 4).
To simplify the selection of the
ki coefficient, the authors in [
17] classified commercial trucks according to their gross weight.
The obtained results were used to estimate CO
2 emissions using a linear relationship:
where
is the index of carbon emission intensity, g/km; and
a is the amount of carbon generated from 1 L of fuel, kg, for a gasoline powered truck
a = 2.3 kg and for diesel powered truck
a = 2.63 kg.
The problems of reducing energy consumption and CO
2 emissions in road transport are considered in MIRAVEC projects. In this project, Carlson et al. studied the influence of road infrastructure, traffic, and weather conditions on the vehicle fuel consumption [
40,
41,
42]. They analyzed similar projects and used methods and models, including MIRIAM (Models for rolling resistance In Road Infrastructure Asset Management systems) and MOVES (Motor Vehicle Emission Simulator). MOVES is an official model developed by the United States Environmental Protection Agency (EPA) based on the VSP method. MIRIAM is a joint project of 12 US and European organizations and includes five subprojects. In MIRIAM-SP2 (to investigate the influence of pavement characteristics on energy efficiency), a nonlinear dependence is used to determine fuel consumption
Fcs for cars, trucks, and trucks with a trailer, L/10 km:
where
Fr is the rolling resistance, N;
Fair is the air resistance, N;
ADC is the average degree of curvature, rad/km;
RF is the slope (rise and fall/gradient), m/km;
v is the velocity, m/s; and
c1,
k5,
d1,
d2,
d3,
e1 and
e2 are the parameters defined for each type of researched vehicle.
Based on a preliminary analysis, the authors in [
40] identified eight essential parameters of functional
f, which are used to estimate the fuel consumption
Fcs of vehicles of a given category (23).
where
Fcs is fuel use, L/km;
No_vehicles is the number of vehicles;
section_length is the length of the road section, m;
RUT is the rut depth, mm;
IRI is the roughness, m/km;
MPD is the macro texture, mm;
ADC is the curvature, 10,000/radius (m); and
RF is the gradient, rad.
Speed limit and road width are measured in km/h and m, respectively. IRI and MPD parameters are correlated with the rolling resistance function Fr.
Carlson et al. showed that the road gradient has a greater influence on fuel consumption than other parameters [
40]. Texture and curvature also significantly affect the output of the model. The authors also determined the linear dependence of the relative change in fuel consumption on the relative changes in the parameters of the function
f(). The results of the project [
40] prove the importance of taking into account the energy aspect during the new road planning and the planning of pavement restoration activities. The influence of the water slick thickness and the depth of the snow with different densities on the road on the fuel consumption of light-duty cars, trucks, and electric vehicles (due to rolling resistance) is studied in works [
41,
42]. The authors in [
43] also studied the dynamics of changes in rolling resistance depending on weather conditions and road surface parameters to reduce energy consumption by vehicles during the life cycle assessment (LCA).
In addition to the considered regression and analytical models of chemical and physical processes, there is a need to predict the energy/fuel consumption on the road for various power plants of vehicles and driving models [
44]. Holden and others have developed a methodology that allows the estimation of the energy consumption of a vehicle before the trip begins. They used data from the National Renewable Energy Laboratory (NREL) to construct driving cycles and further drivetrain simulations to determine the energy/fuel consumption of the vehicles. The methodology is based on determined average values of energy consumption for individual driving categories to be used as a characteristic fuel consumption for a given category. Driving categories are formed by the vehicle speed, the acceleration tendency, the levels of traffic jams, and the slope. The used simulation model allows you to change the set of its attributes. Adding new attributes improves the accuracy of the model, but reduces the model reliability due to the insufficient sample size in the categories. The basic attributes are velocity, gradient, and orientation (network geometry). The fuel/energy consumption on the entire route is predicted by classifying each route section and determining the fuel/energy consumption of these sections by their attributes. The methodology was tested for a car with a gasoline engine, a hybrid electric vehicle (HEV), and a plug-in hybrid electric vehicle (PHEV). Taking into account the GPS trajectory in the model makes it possible to estimate vehicle fuel/energy consumption on network routes of various scales.
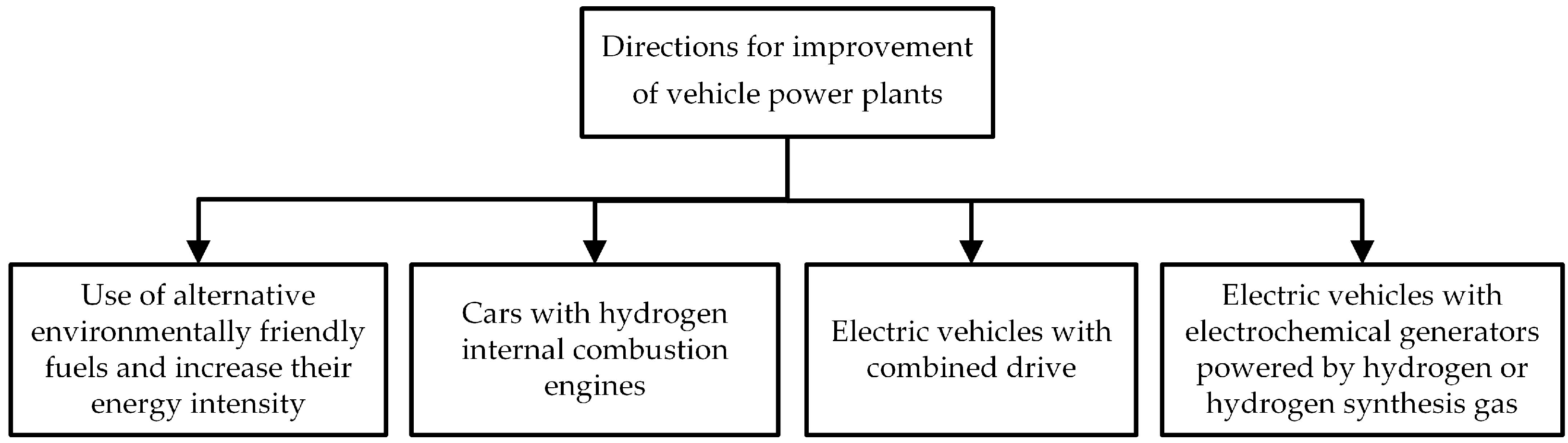
The global shortage of oil and environmental problems determine the importance of the application of more economical and ecological technologies in transport, including technologies for the improvement of power plants as the most energy-intensive vehicle component. Lutsyk et al. [
45] considered four main areas of improvement of vehicle power plants, which are presented in
Figure 2.
One of the solutions to the environmental crisis and dependence on oil is the transition from vehicles with an internal combustion engine to electric vehicles: battery electric vehicles (BEVs), hybrid electric vehicles (HEVs), plug-in hybrid electric vehicles (PHEVs), and fuel cell electric vehicles (FCEVs). Energy consumption assessment tools are needed to compare the different types of electric vehicles and manage them optimally.
According to the authors in [
45], the most promising energy source is hydrogen, which can increase the efficiency of an internal combustion engine by 1.7 times compared to a conventional gasoline engine. An efficient way to use hydrogen is to use a fuel cell electric vehicle (FCEV). Hissler [
46] distinguishes three categories of FCEVs: mild hybridization, mid-power, and range extender. In the first case, the only source of energy is hydrogen. In this case, a small capacity buffer battery is used only at high voltage. FCEVs in the second category use hydrogen and a battery to power the drivetrain. In the FCEV of the third category, the energy demand is provided by the battery. A fuel cell is only used when needed: to charge the battery or increase energy. Auxiliary elements such as pumps, compressors, and cooling components affect the efficiency of the fuel cell system. In work [
46], Hissler gives three methods for determining hydrogen consumption according to ISO 23828 [
47]: the pressure method based on the measurement of pressure and temperature; the gravimetric method based on the measurement of the mass of the tank; and the flow method based on the measurement of the amount of hydrogen. Hissler defines the total energy demand
Ecycle (Ws) in the WLTC cycle using the following formula:
where
Ei =
Fi ×
di for
Fi > 0 and
Ei = 0 for
Fi ≤ 0;
di is the distance traveled during test cycle
i, km.
where
Fi is the driving force during time period (
i − 1) to (
i), N;
vi is the target velocity at time
ti, km/h;
TM is the test mass, kg;
ai is the acceleration during time period (
i − 1) to (
i), m/s
2; and
F0 F1 and
F2 are the road load coefficients for the test vehicle under consideration in N, N/km/h and in N/(km/h)
2, respectively.
In work [
48], Usmanov investigates the existing strategies for the energy consumption management of HEVs. The strategies aim to distribute power between energy sources to maintain battery charge and minimize energy consumption and emissions. The author divides all strategies into two groups: those based on rules and those based on optimization. Each strategy corresponds to a set of defined models. Rule-based strategies use deterministic models or fuzzy logic (default, adaptive, predictive).
Martyushev et al. systematized methods for increasing the energy efficiency of BEVs, PHEVs, and FCEVs based on the optimization of battery consumption [
49]. Individual and public transport were the subjects of the investigation. The authors in [
49] divided the studied methods into groups (
Figure 3).
The most effective methods are defined in each group. Each method is only used for a given electric vehicle type. These methods use physical laws to estimate energy consumption. The dynamics of energy consumption is studied on the basis of simulation models, neural networks with deep learning algorithms, genetic algorithms, fuzzy logic models, optimization models of dynamic programming, forecasting models, PTV VISSIM models, and hybrid models. In general, the list of these models is consistent with the mathematical models considered in [
48].
The fuzzy logic-based models were applied in control units of auxiliary systems of hybrid cars and fuel cell hybrid vehicles in works [
50,
51,
52]. Neural networks and genetic algorithms for estimating fuel consumption were investigated in [
53,
54]. The authors of [
54] study the methods for predicting the operation of supercapacitors. Supercapacitors can be used as an additional power source for starting EVs. They provide the advantages of long life and environmental protection. The electrochemical system in the supercapacitor has strong characteristic connections. This complicates the application of their physical models and gives priority to the model-based methods for predicting the performance parameters of supercapacitors. The HHO algorithm is used to optimize the initial learning speed and structure of the hidden layer of the network and is based on the definition of the escape energy factor. To confirm the high performance of the HHO-LSTM algorithm, the authors used various capacitor sets to predict their capacitance. The authors predicted the supercapacitors’ capacity attenuation under various temperature conditions.
Paper [
55] examines the advantages and limitations of methods for estimating battery parameters that correlate with SOC and SOH values. These methods are implemented on the basis of sensor systems. Non-embedded and embedded sensors are used to measure current, voltage, temperature on the surface and inside the battery, and strain and stress in the working process. Among these parameters, temperature and strain have the greatest impact on SOC. The paper proves the prospects of using non-embedded and embedded fiber optic sensors for SOC evaluation. Special attention is paid to optical fiber grating sensors (TFBG, FPI) and optical fiber evanescent wave (OFEW, SPR, LSPR). However, it is noted that there is no connection between fiber optic sensors and battery management system algorithms. This determines the directions of future research in this field.
Systematization of the main considered energy efficiency assessment models and their sub-models for determining fuel/energy consumption is presented in the next section. The existing methods of energy efficiency assessment are based on static arrays of input data of constant dimensions (an unchanged list of parameters).
Section 3.2 presents a method for predicting the vehicle energy efficiency based on dynamic arrays of input data (with variable dimensions) depending on the current state of the transport system.


 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}