
Mechanism of Low-Frequency Oscillation When Electric Multiple Units Pass Neutral Zone, and Suppression Method

 , ,
, ,
Abstract
:1. Introduction
2. Low-Frequency Oscillation and Overvoltage Characteristics of the Contact Line
2.1. Test Method and Test Process
2.2. Wave Characteristics and Laws
3. Vehicle-Line Institute Model and Oscillation Characteristics
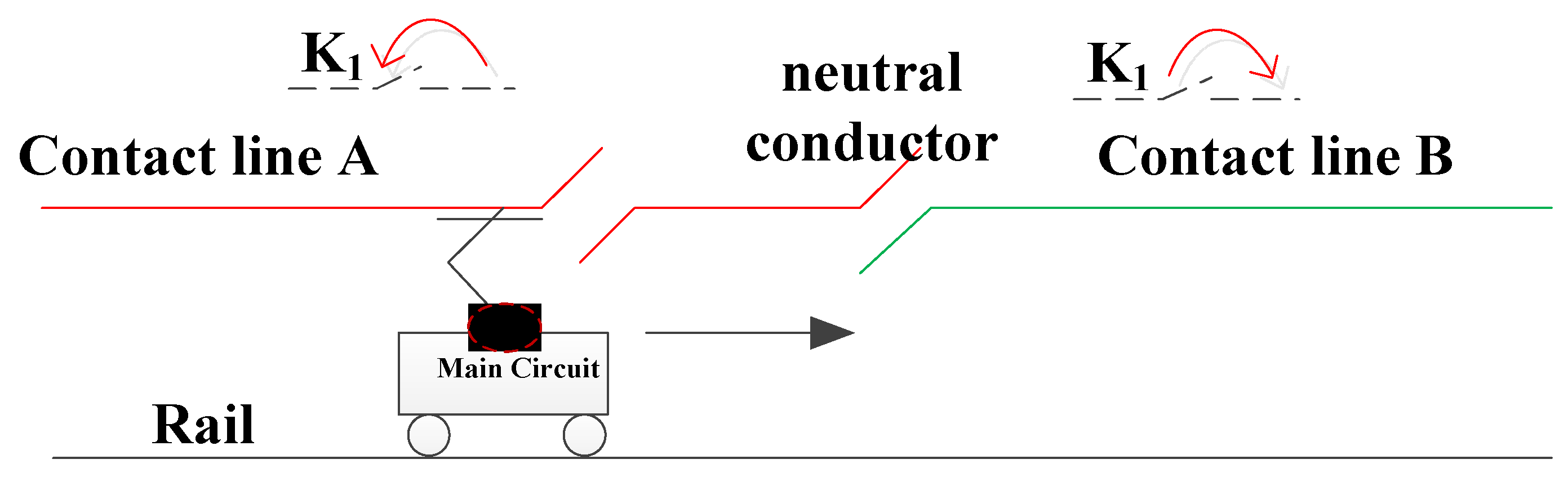
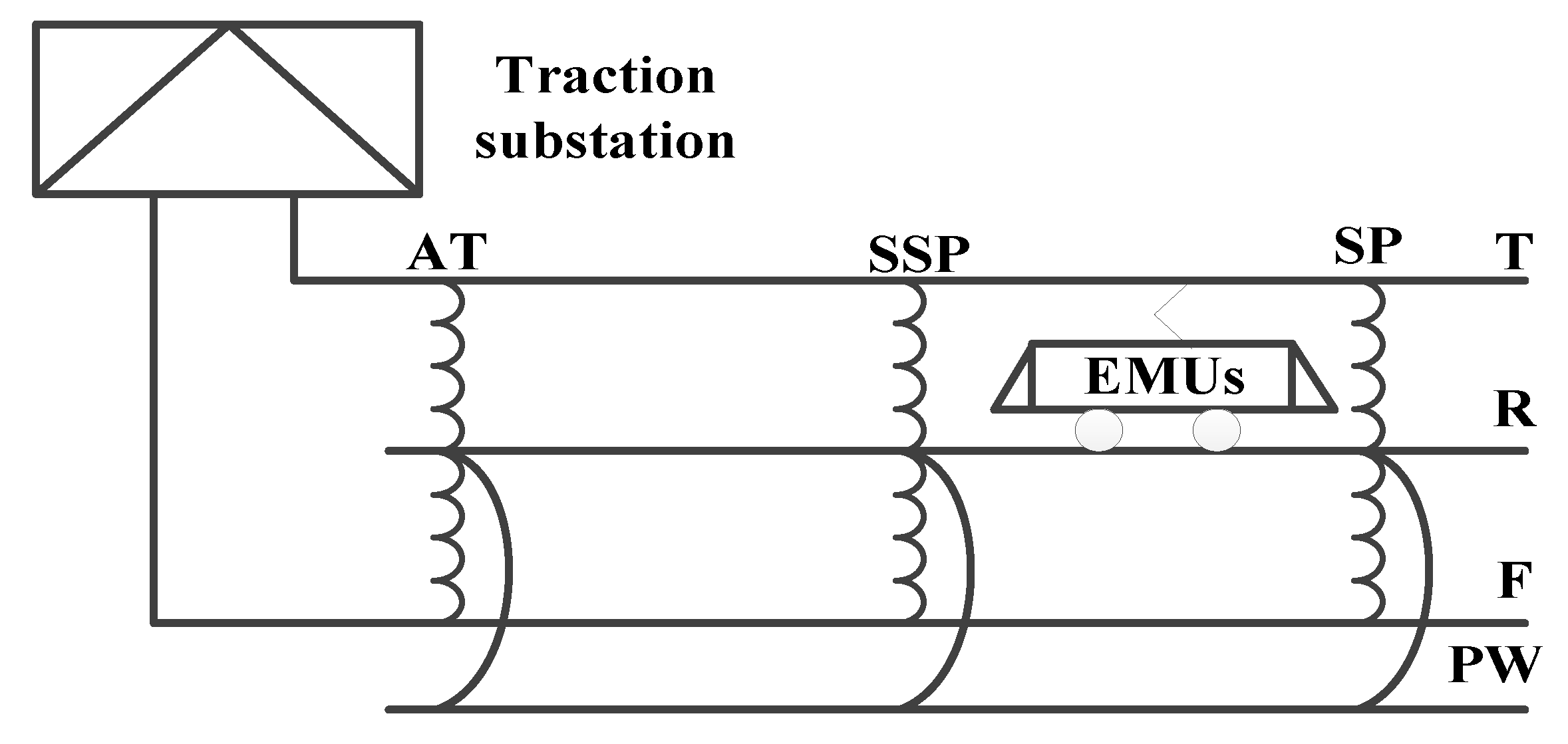
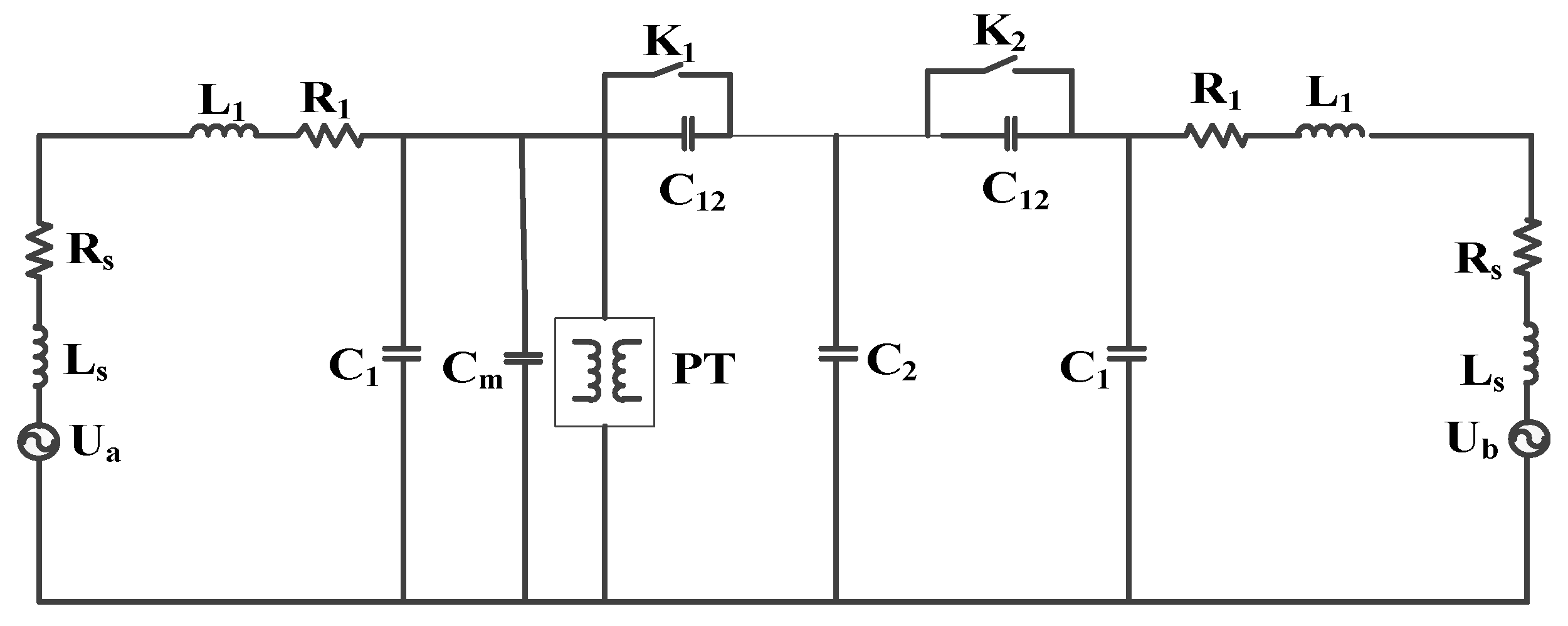
3.1. Research on the Model of a Train Passing through the Neutral Zone
- (1)
- When α > ω0; that is, , p1 and p2 are two unequal negative real numbers.This situation is called the aperiodic discharge or non-oscillating discharge process.
- (2)
- When α < ω0; that is, R < 2(L/C)0.5, and p1 and p2 are equal, then the equivalent circuit has only one frequency, and the neutral voltage to the ground is:It can be seen from Equation (6) that there is no oscillating change, and the circuit has a non-oscillating nature, but this is the dividing line between an oscillating circuit and a non-oscillating circuit, so the situation when R < 2(L/C)0.5 is called a critical non-oscillating process.
- (3)
- When α < ω0; that is, R < 2(L/C)0.5, then p1 and p2 are a pair of conjugate complex roots, and the neutral voltage to the ground is:This scenario involves an oscillating discharge, where the waveform undergoes periodic changes, and the energy storage component exchanges energy periodically, as well. Equation (2) can be expressed as us = Umsin(ωt + Φ), with ωt representing the angular frequency of the power supply, and Φ indicating its initial phase angle. Consequently, Equation (2) takes on a new form.
- (1)
- If it is a non-oscillating circuit, the neutral voltage to the ground can be expressed as:Taking Equation (5) into Equation (9), the expression of Uc and i is:
- (2)
- If the circuit is in a critical state, in the same initial state, then the same as above can be obtained using:
- (3)
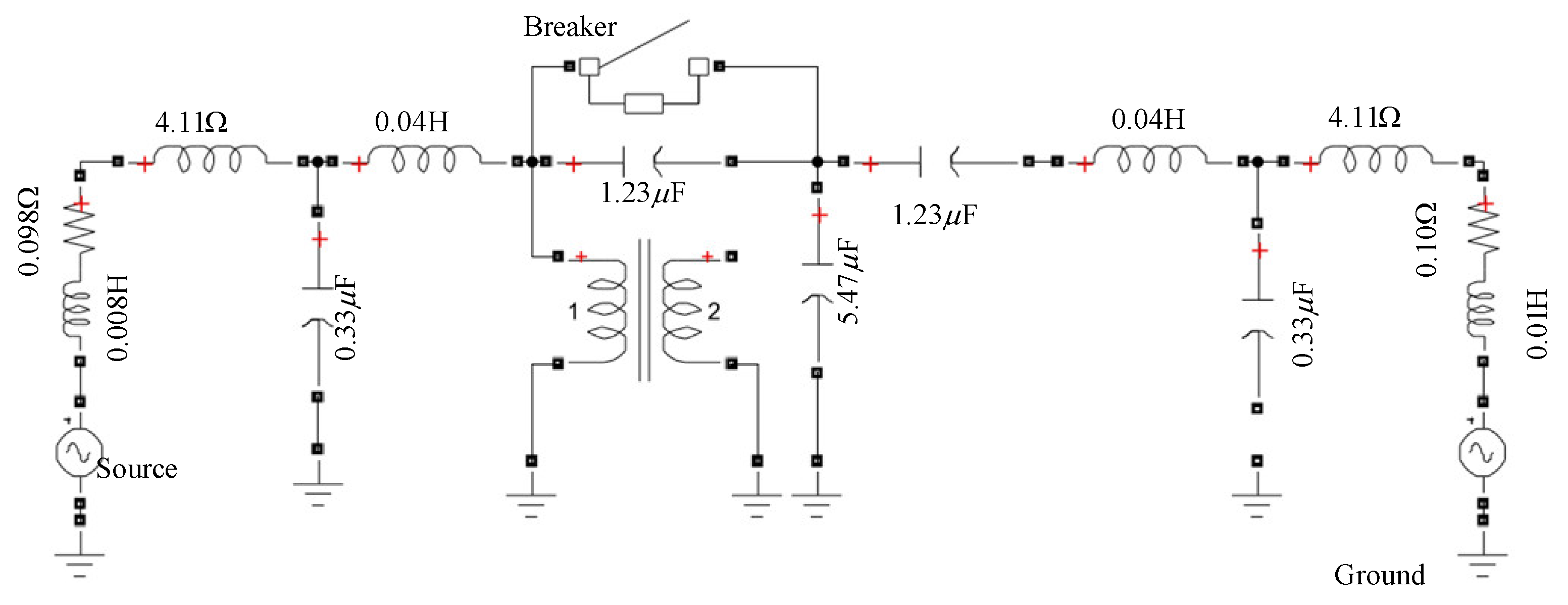
- If it is an oscillating circuit then, at this time, and are a pair of conjugate complex numbers, p1= −α + jωd, p2 = −α − jωd, which can be obtained under the same initial state:When the EMU enters the neutral zone, and experiences low-frequency oscillation, the equivalent circuit undergoes oscillation. By applying the principle of circuit superposition, we can combine Equations (6) and (7) with Equations (11) and (12), respectively. This allows us to derive a mathematical expression for the voltage when the EMU enters the electrical neutral zone.When the EMU enters the electrical neutral zone, the ground voltage of the neutral zone is influenced by the phase angle of the contact line power supply. The structure of the neutral zone affects its capacitance parameter C, and determines how voltage oscillations occur within it. As entry into this zone occurs at random times, each time an EMU enters, a different electromagnetic transient process is generated, resulting in varying excitation levels in the roof voltage transformers. The circuit’s oscillation angular frequency ω0 exceeds that of its free component ωd, which decays exponentially with a speed determined by the attenuation coefficient α = R/2L. A larger value for α results in a faster amplitude decay, and a shorter time to reach zero, while also taking into account the contact line impedance.The resistance part is 0.05 Ω/km, and the resistance value is about 0.01 Ω when the length of the neutral zone is 200 m.Comparing the inductance and resistance parameters of the oscillating system, it can be seen that α = 0.001/10,000, the damping in the oscillation process is extremely small, and there is almost no attenuation process.
3.2. Oscillation Process and Overvoltage Characteristics
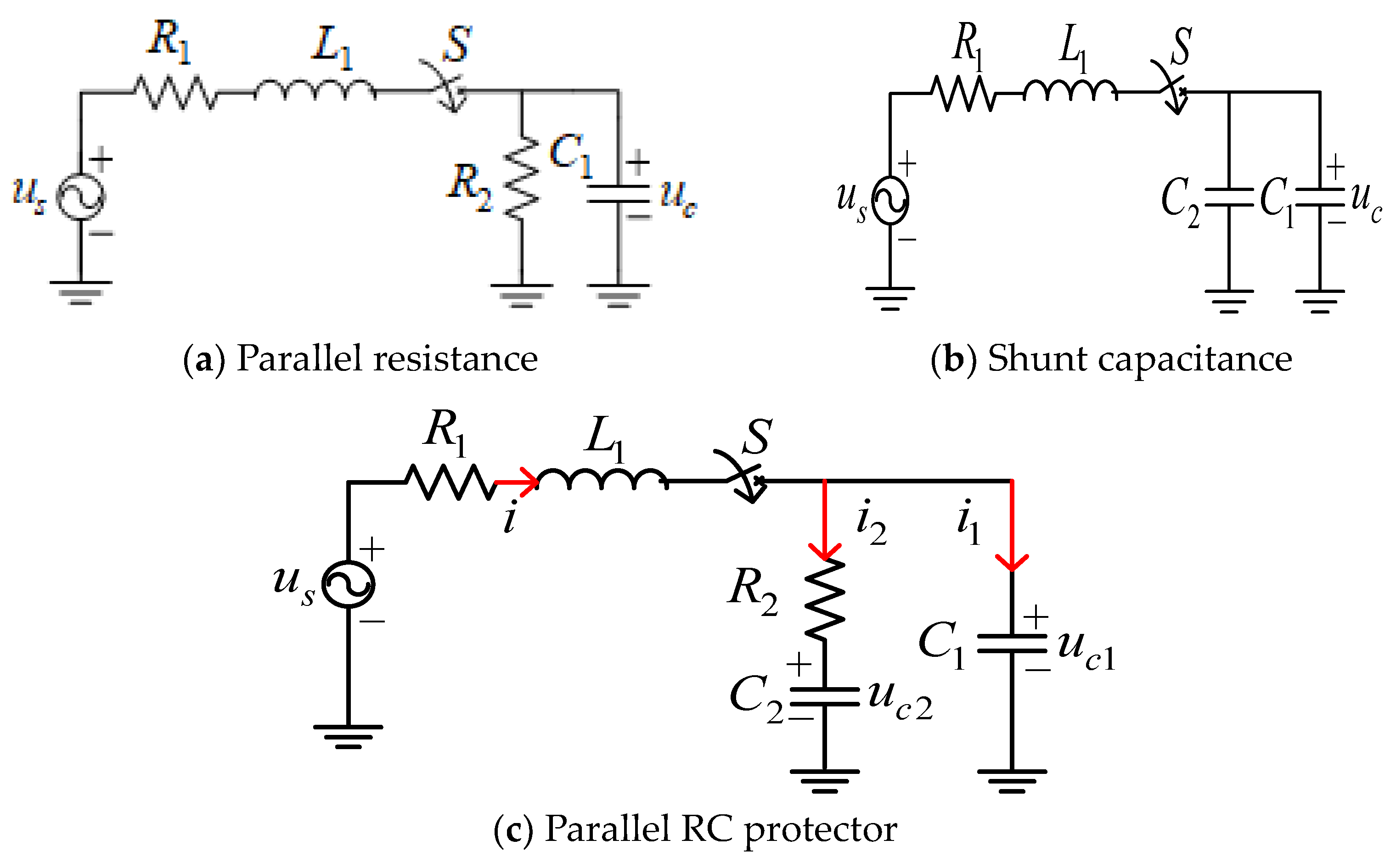
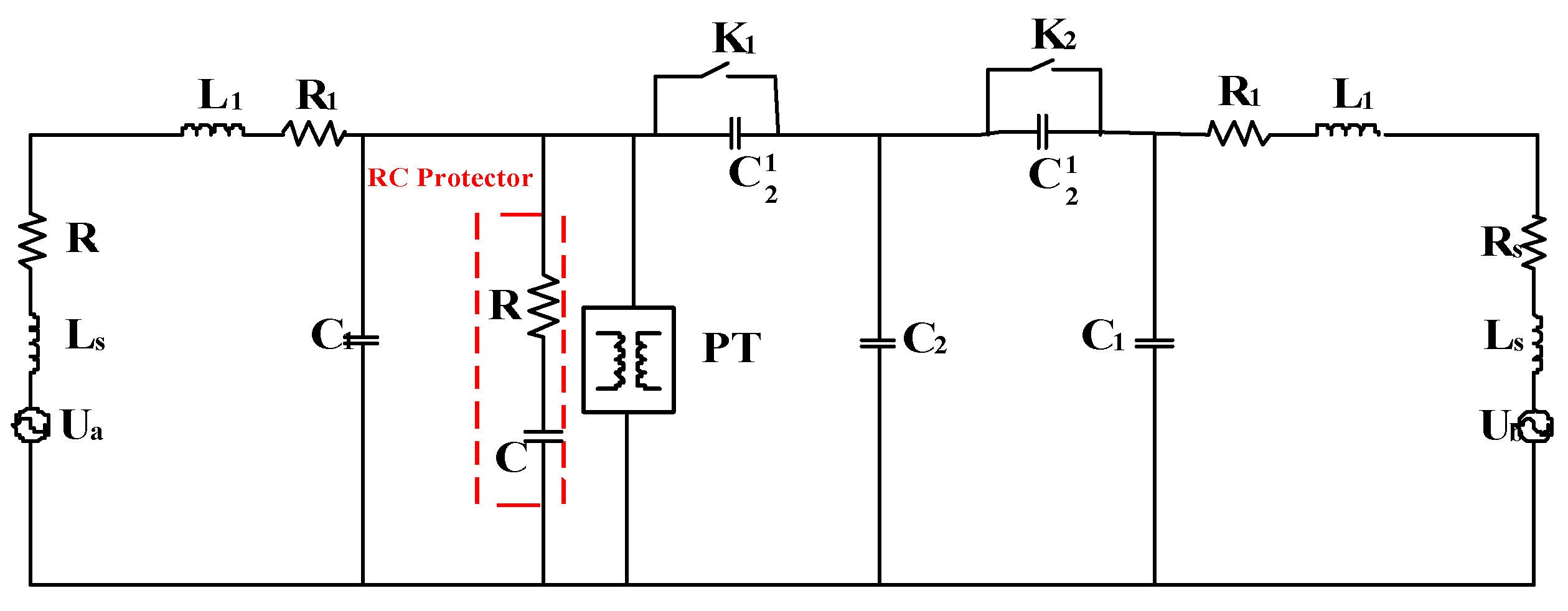
3.3. Methods of Suppressing Oscillation Process
4. Conclusions
- (1)
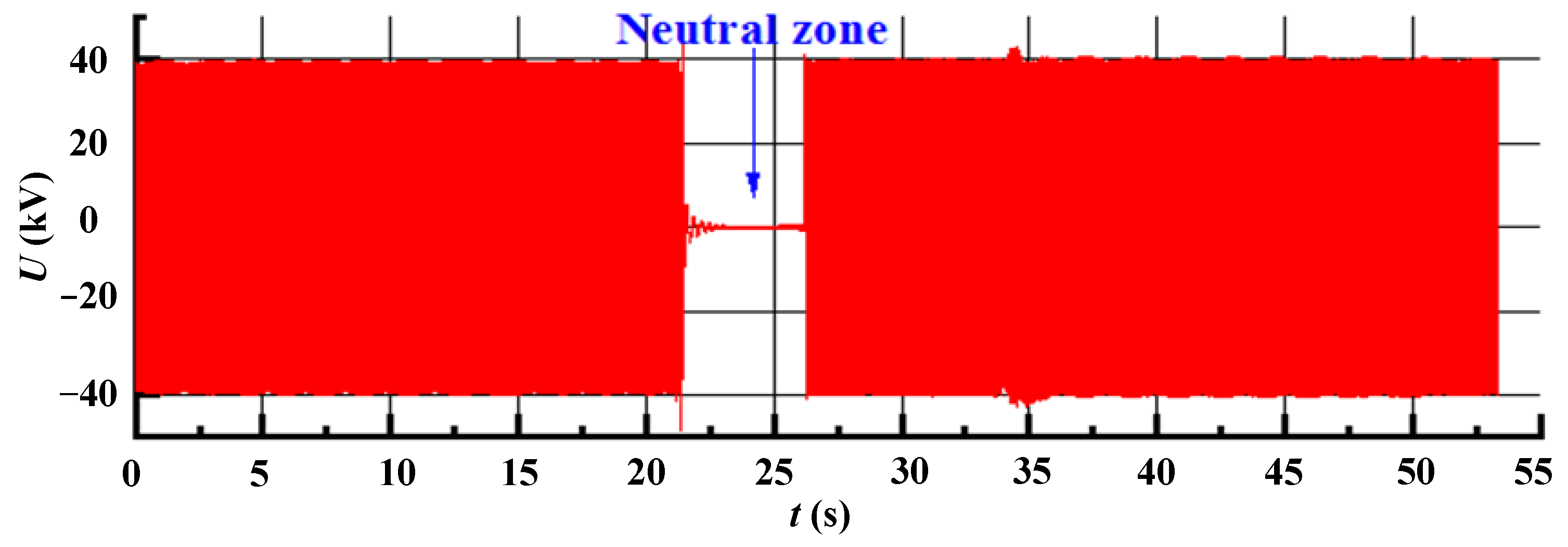
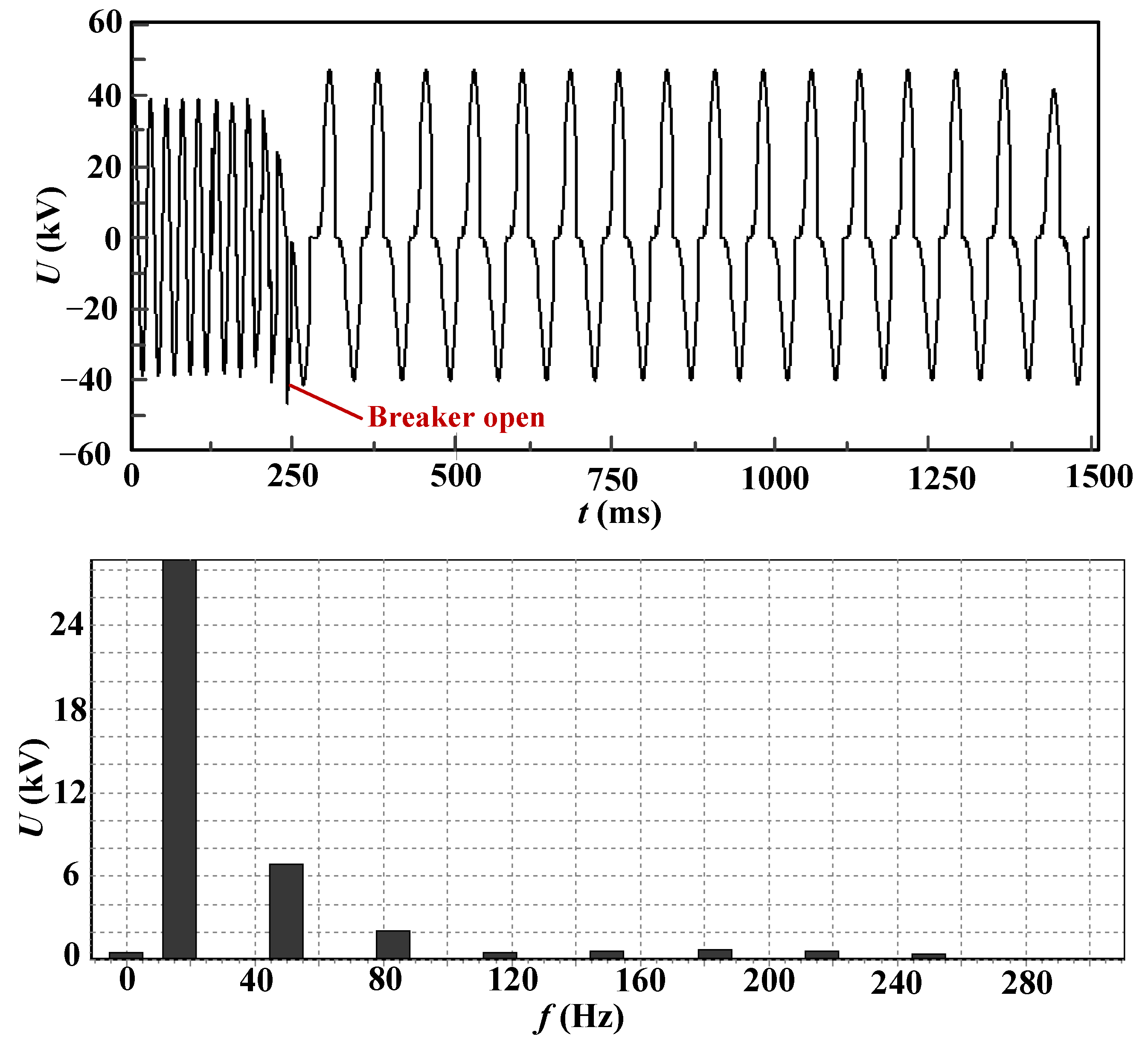
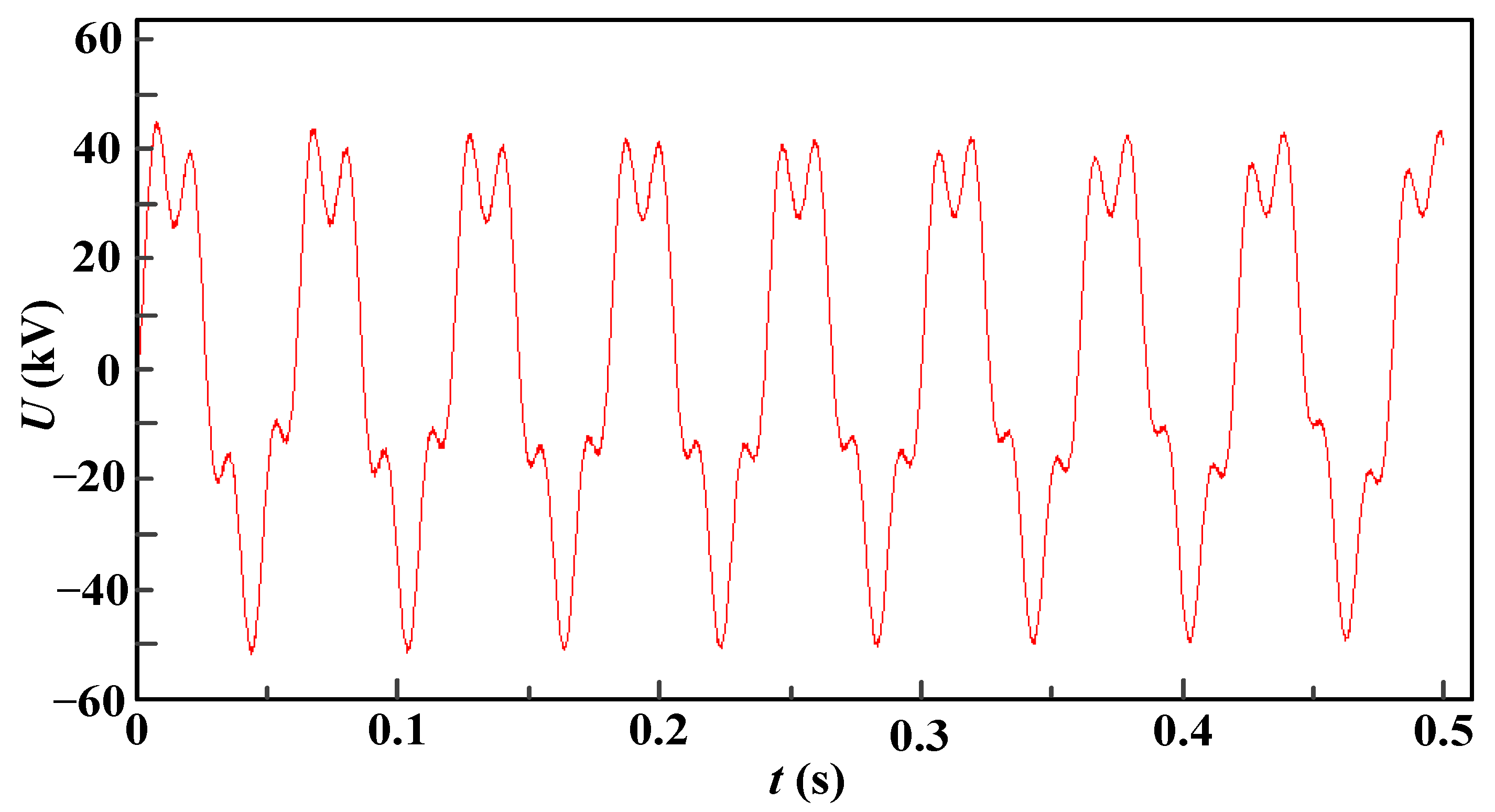
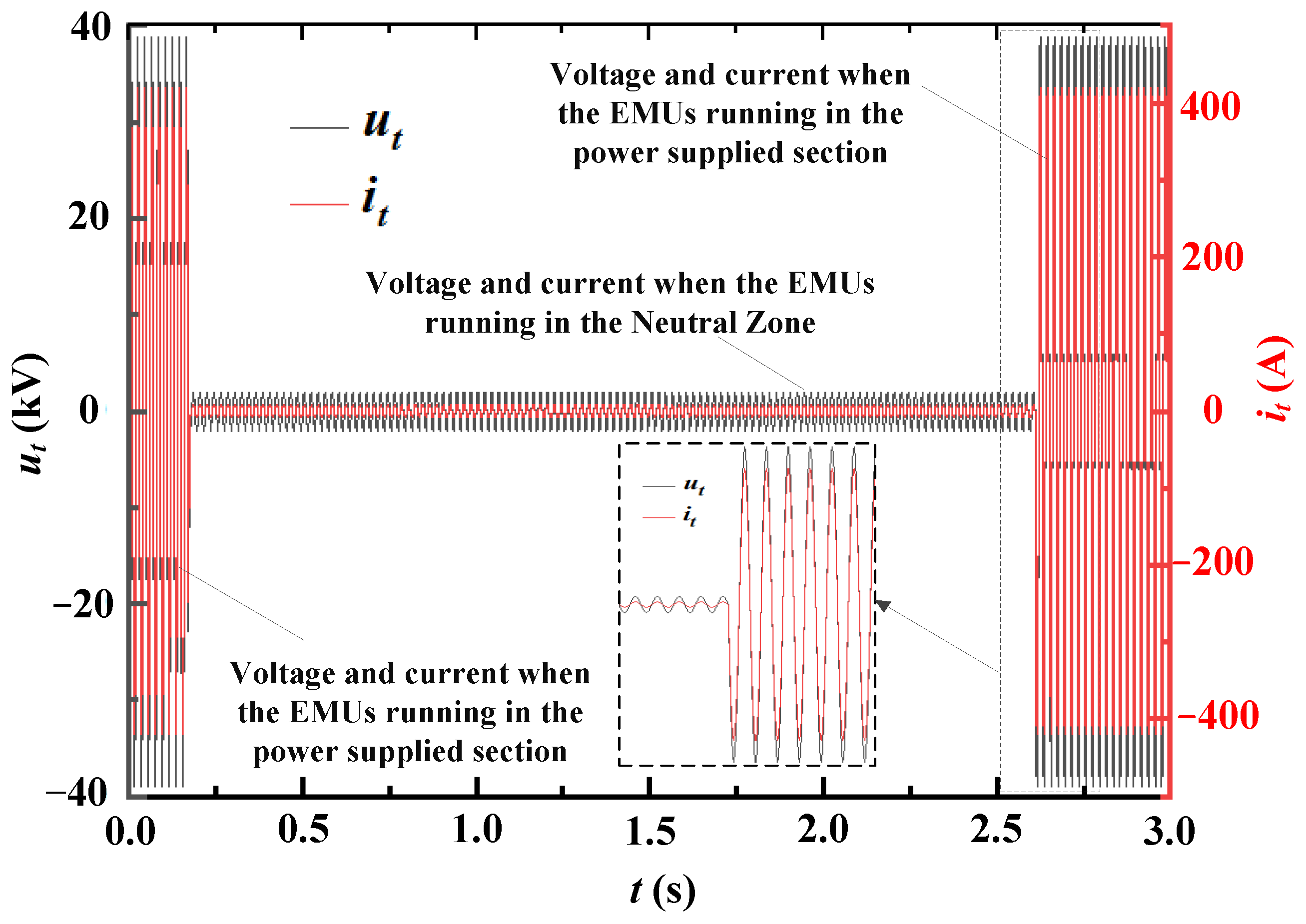
- During normal operation, when an EMU entered the neutral zone, there was a significant increase in the operating overvoltage, due to the circuit breaker opening and closing. The voltage in the neutral zone remained very low. Abnormal increases in the grid voltage within this area could result in noticeable low-frequency oscillations, with amplitudes reaching up to 51.8 kV, and a frequency of approximately 16.67 Hz, or one-third of the power frequency.
- (2)
- The voltage levels within an EMU’s neutral zone during electrical separation were dependent on the power phase angles at the entry time. When these angles fell between 60–90° and 240–270°, the voltage amplitude was relatively high, with the maximum values reaching up to 69.75 kV, accompanied by low-frequency oscillations, mainly at one-third of the power frequency.
- (3)
- The installation of RC suppression devices reduced the absolute peak voltage below 20 kV upon entering the electrical neutral zone by nearly 60%, compared to cases without such devices. The low-frequency oscillation was also suppressed.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, L.; Lu, X.; Min, Y.; Zhang, Y.; Chen, Q.; Zhao, Y.; Ben, C. Optimization of governor parameters to prevent frequency oscillations in power systems. IEEE Trans. Power Syst. 2018, 33, 4466–4474. [Google Scholar] [CrossRef]
- Chen, G.; Tang, F.; Shi, H.; Yu, R.; Wang, G.; Ding, L.; Liu, B.; Lu, X. Optimization strategy of hydro-governors for eliminating ultra-low frequency oscillations in hydro-dominant power systems. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 6, 1086–1094. [Google Scholar] [CrossRef]
- Demello, F.P.; Koessler, R.J.; Agee, J.; Anderson, P.M.; Doudna, J.H.; Fish, J.H.; Hamm, P.A.; Kundur, P.; Lee, D.C.; Rogers, G.J.; et al. Hydraulic turbine and turbine control models for system dynamic studies. IEEE Trans. Power Syst. 1992, 7, 167–179. [Google Scholar]
- Yu, X.; Zhang, J.; Fan, C.; Chen, S. Stability analysis of governor turbine hydraulic system by state space method and graph theory. Energy 2016, 114, 613–622. [Google Scholar] [CrossRef]
- Liu, Z.; Yao, W.; Wen, J.; Cheng, S. Effect analysis of generator governor system and its frequency mode on inter-area oscillations in power systems. Int. J. Elect. Power Energy Syst. 2018, 96, 1–10. [Google Scholar] [CrossRef]
- Schleif, F.R.; Martin, G.E.; Angell, R.R. Damping of system oscillations with a hydrogenerating unit. IEEE Trans. Power Appar. Syst. 1967, 86, 438–442. [Google Scholar] [CrossRef]
- Martinez, J.A.; Mork, B.A. Transformer Modeling for Low- and Mid-Frequency Transients—A Review. IEEE Trans. Power Deliv. 2005, 20, 1625–1632. [Google Scholar] [CrossRef]
- Leon, F.; Farazmand, A.; Joseph, P. Comparing the T and pi Equivalent Circuits for the Calculation of Transformer Inrush Currents. IEEE Trans. Power Deliv. 2012, 27, 2390–2398. [Google Scholar] [CrossRef]
- Jazebi, S.; Zirka, S.E.; Lambert, M.; Rezaei-Zare, A.; Chiesa, N.; Moroz, Y.; Chen, X.; Martinez-Duro, M.; Arturi, C.M.; Dick, E.P.; et al. Duality Derived Transformer Models for Low-Frequency Electromagnetic Transients—Part I: Topological Models. IEEE Trans. Power Deliv. 2016, 31, 2410–2419. [Google Scholar] [CrossRef]
- Mork, B.A.; Gonzalez, F.; Ishchenko, D.; Stuehm, D.L.; Mitra, J. Hybrid Transformer Model for Transient Simulation—Part I: Development and Parameters. IEEE Trans. Power Deliv. 2007, 22, 248–255. [Google Scholar] [CrossRef]
- Zhang, R.; Bai, Y.; Huang, R.; Fu, Y. Cause Analysis and preventive measures of low frequency oscillation in power supply side of power supply terminal. Guizhou Electr. Power Technol. 2013, 16, 15–17. [Google Scholar]
- Wang, Y.; Chang, R.; Chang, X.; Guo, X. Study on the key technology of identifying the type of low frequency oscillation and locating the disturbance source in power grid. Xinjiang Electr. Power Technol. 2015, 2, 1–7. [Google Scholar]
- Li, Y.; Pan, J.; Yang, T.; Huang, S.; Gao, W. Status and development of low frequency oscillation monitoring and suppression technology in Power Grid. Hubei Electr. Power 2014, 38, 8–16. [Google Scholar]
- Zhang, X.; Chen, J.; Zhang, G.; Wang, L.; Qiu, R.; Liu, Z. An active oscillation compensation method to mitigate high-frequency harmonic instability and low-frequency oscillation in railway traction power supply system. IEEE Access 2018, 6, 70359–70367. [Google Scholar] [CrossRef]
- Chen, F.; Yang, X.; Liu, L.; Ma, X.; Zhang, L.; Yu, Y. Study on the influence of HVDC to low frequency oscillation in interconnected power system. In Proceedings of the 2018 2nd IEEE Conference on Energy Internet and Energy System Integration (EI2), Beijing, China, 20–22 October 2018; pp. 1–5. [Google Scholar]
- Li, H.; Peng, K.; Chen, Y.; Guo, L.; Li, P.; Li, X. Mechanism Analysis of Low Frequency Oscillation on DC Voltage Control Time Scale in DC Distribution System. High Volt. Eng. 2021, 47, 2232–2239. [Google Scholar]
- Chen, H.; Huang, H.; Zhang, Y.; Su, Y. Researches on DC modulation to damp low frequency oscillation in China Southern Power Grid. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 5 October 2015; pp. 1–6. [Google Scholar]
- Gao, H.; Zhan, X.; Jiang, X.; Wu Jie Yang, Q. Research on mechanism of power system low frequency oscillation based on damping coefficient. In Proceedings of the 2017 4th International Conference on Electrical and Electronics Engineering, Ankara, Turkey, 8–10 April 2017; pp. 99–103. [Google Scholar]
- Yang, J.; Hu, H.; Zhou, Y.; Tao, H.; Zhao, C.; He, Z. Analysis of low frequency Oscillation suppression in Traction Power Supply System. Electrified Railw. 2018, 29, 15–28. [Google Scholar]
- Zhou, Y.; Hu, H.; Yang, X.; He, Z. Railway Electrification System. Chin. J. Electr. Eng. 2017, 37, 72–80. [Google Scholar]
- Zha, W.; Yuan, Y. Mechanism of active-power-PSS low-frequency oscillation suppression and characteristic of anti-regulation. In Proceedings of the 2011 Third International Conference on Measuring Technology and Mechatronics Automation, Shanghai, China, 6–7 January 2011; pp. 538–541. [Google Scholar]
- Lu, S.; Zhang, W.; Wang, T.; Cai, Y.; Li, H.; Zhu, T.; Gang, Y.; Yu, Y. Parameter Tuning and simulation analysis of PSS function in excitation system with suppression of low frequency oscillation. In Proceedings of the 2019 IEEE 8th International Conference on Advanced Power System Automation and Protection, Xi’an, China, 21–24 October 2019; pp. 474–479. [Google Scholar]
- Pan, Y.; Yang, Y.; He, J.; Ariya, S.; Frede, B.; Ariya, S.; Frede, B. Low-frequency oscillation suppressi-bregeon in series resonant dual-active-bridge converters under fault tolerant operation. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition, Baltimore, MD, USA, 29 September–3 October 2019; pp. 1499–1505. [Google Scholar]
- Zhou, Y.; Hu, H.; Lei, K.; Meng, Z.; He, Z. Low frequency constant amplitude oscillation mechanism of railway electrification system. Chin. J. Electr. Eng. 2020, 36, 295–314. [Google Scholar]
- Zhou, Y.; Hu, H.; Jiang, X.; He, Z.; Zhao, C. Study on voltage resonance of Low Frequency Power Supply Network for Traction Power Supply. Grid Technol. 2016, 40, 1830–1838. [Google Scholar]
- Monteiro, T.C.; Martinz, F.O.; Matakas, L.; Komatsu, W. Transformer Operation at Deep Saturation: Model and Parameter Determination. IEEE Trans. Ind. Appl. 2012, 48, 1054–1063. [Google Scholar] [CrossRef]
- Casoria, S.; Sybille, G.; Brunelle, P. Hysteresis modeling in the MATLAB/Power System Blockset. Math. Comput. Simul. 2003, 63, 237–248. [Google Scholar] [CrossRef]
- Moses, P.S.; Masoum, M.A.S.; Toliyat, H.A. Dynamic Modeling of Three-Phase Asymmetric Power Transformers with Magnetic Hysteresis: No-Load and Inrush Conditions. IEEE Trans. Energy Convers. 2010, 25, 1040–1047. [Google Scholar] [CrossRef]
- Hassani, V.; Tjahjowidodo, T.; Do, T.N. A survey on hysteresis modeling, identification and control. Mech. Syst. Signal Process. 2014, 49, 209–233. [Google Scholar] [CrossRef]
- Leite, J.V.; Benabou, A.; Sadowski, N.; da Luz, M.V.F. Finite Element Three-Phase Transformer Modeling Taking into Account a Vector Hysteresis Model. IEEE Trans. Magn. 2009, 45, 1716–1719. [Google Scholar] [CrossRef]
- Yao, C.; Wang, X.; Bi, C.; Zhang, Y.; Jin, C. An approach to suppress low-frequency oscillation in electrification railway based on TCSC impedance control. In Proceedings of the 2018 IEEE 2nd International Electrical and Energy Conference (CIEEC), Beijing, China, 4–6 November 2018; pp. 110–113. [Google Scholar]
- Bi, C.; Wang, X.; Yao, C.; Pang, K.; Jin, C. Analysis and evaluation of suppression methods on low-frequency oscillation in electric railways. In Proceedings of the 2018 IEEE 2nd International Electrical and Energy Conference (CIEEC), Beijing, China, 4–6 November 2018; pp. 56–63. [Google Scholar]
- Zhou, G.; Tan, W.; Zhou, S.; Wang, Y.; Ye, X. Analysis of Pulse Train Controlled PCCM Boost Converter with Low Frequency Oscillation Suppression. IEEE Access 2018, 6, 68795–68803. [Google Scholar] [CrossRef]
- Sun, J.; Hu, K.; Fan, Y.; Liu, J.; Yan, S.; Zhang, Y. Modeling and Experimental Analysis of Overvoltage and Inrush Current Characteristics of the Electric Rail Traction Power Supply System. Energies 2022, 15, 9308. [Google Scholar] [CrossRef]
- Fan, L.; Li, N.; Wang, H. Analysis of low frequency oscillation of damping power system with controllable series capacitor compensation device. Power Grid Technol. 1998, 22, 35–39. [Google Scholar]
- Sun, J.; Mehrotra, V. Orthogonal winding structures and design for planar integrated magnetics. In Proceedings of the IEEE APEC, Anaheim, CA, USA, 22–26 February 2004; pp. 933–938. [Google Scholar]
- Sun, Y.; Zheng, W.; Xu, W. A new method to model the harmonic generation characteristics of the thyristor controlled reactors. In Proceedings of the Power Tech, Lausanne, Switzerland, 1–5 July 2007; IEEE: New York, NY, USA, 2007; pp. 1785–1790. [Google Scholar]
- Tylavsky, D.J.; Brown, K.A.; Ma, T.T. Closed form solution for underground impedance calculations. Proc. IEEE 1986, 74, 1290–1292. [Google Scholar] [CrossRef]
- Tylavsky, D.J. Conductor Impedance Approximations for Deep-Underground Mines. IEEE Trans. Ind. Appl. 1987, 23, 723–730. [Google Scholar] [CrossRef]
- Wait, J. Quasi-Static Limit for the Propagating Mode along a Thin Wire in a Circular Tunnel. IEEE Trans. Antennas Propag. 1977, 25, 441–443. [Google Scholar] [CrossRef]
- Hongyi, Z.; Zhigang, L.; Ye, C.; Ke, H. Extended black-box model of pantograph arcing considering varying pantograph detachment distance. In Proceedings of the 2017 IEEE Transportation Electrification Conference and Expo, Asia-Pacific, Harbin, China, 7–10 August 2017. [Google Scholar]
- Liu, Y.J.; Chang, G.W.; Huang, H.M. sMayr’s equation-based model for pantograph arc of high-speed railway traction system. IEEE Trans. Power Deliv. 2010, 25, 2025–2027. [Google Scholar] [CrossRef]
- Qu, Z.J.; Liu, Y.X.; Zhou, M.; Jiang, J.J.; Liu, L. Over-voltage suppression of electric railway articulated neutral insulator. Adv. Mater. Res. 2013, 791–793, 1837–1840. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Z.; Mu, X.; Song, X.; Huang, K.; Deng, Y. Research on electromagnetic transient process in articulated split-phase insulator of high-speed railway considering viaduct’s electrical coupling. Int. Trans. Electr. Energy Syst. 2017, 27, e2376. [Google Scholar] [CrossRef]
- Zhang, F.; Fang, D.; Song, W.; Chen, J. Study on a novel two-stage control method for UPFC with damping tie-line low-frequency Oscillation. In Proceedings of the 21th Annual Conference of Power System Automation, Shanghai, China, 18–21 January 2005; pp. 1039–1044. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Name | Model | Test Standard, Accuracy |
|---|---|---|---|
| 1 | Data acquisition | HS4 | 0.1% (12 bit) |
| 5 | Voltage probe | —— | 100 V/2 V, 1% |
| 6 | Current Sensor | PQ5 (U.S. Fluke) | 0~5 A, 40~2 kHz, 2% |
| Frequency (Hz) | Percentage (%) | Frequency (Hz) | Percentage (%) |
|---|---|---|---|
| 0 | 6.04 | 133.33 | 13.36 |
| 16.67 | 100 | 150 | 6.86 |
| 33.33 | 6.29 | 166.67 | 10.89 |
| 50 | 31.34 | 183.33 | 9.81 |
| 66.67 | 9.53 | 200 | 6.12 |
| 83.33 | 10.73 | 216.67 | 6.88 |
| 100 | 12.07 | 233.33 | 2.81 |
| 116.67 | 4.60 | 250 | 3.17 |
| c | T1 | R1 | P1 | F1 | T2 | R2 | P2 | F2 |
|---|---|---|---|---|---|---|---|---|
| T1 | 13.12 | −0.83 | −1.74 | −2.04 | −2.00 | −0.41 | −0.36 | −0.56 |
| R1 | −0.83 | 20.12 | −0.63 | −0.23 | −0.41 | −0.44 | −0.12 | −0.09 |
| P1 | −1.74 | −0.63 | 8.42 | −1.12 | −0.36 | −0.12 | −0.08 | −0.11 |
| F1 | −2.04 | −0.23 | −1.12 | 8.28 | −0.56 | −0.09 | −0.11 | −0.26 |
| T2 | −2.00 | −0.41 | −0.36 | −0.56 | 13.12 | −0.83 | −1.74 | −2.04 |
| R2 | −0.41 | −0.44 | −0.12 | −0.09 | −0.83 | 20.12 | −0.63 | −0.23 |
| P2 | −0.36 | −0.12 | −0.08 | −0.11 | −1.74 | −0.63 | 8.42 | −1.12 |
| F2 | −0.56 | −0.09 | −0.11 | −0.26 | −2.04 | −0.23 | −1.12 | 8.28 |
| Serial Number | JDZXW5-25J | JDZXW5A-25J | JDZXW7-25D |
|---|---|---|---|
| EMU type | CRH3X | CRH5X | CR400XF |
| Primary DC resistance 20 °C | 43,160 Ω | 46,488 Ω | 43,160 Ω |
| Primary inductance | 11,000 H–12,000 H | 11,000 H–12,000 H | 11,000 H–12,000 H |
| Phase Angle (°) | Voltage (kV) | Phase Angle (°) | Voltage (kV) | Phase Angle (°) | Voltage (kV) |
|---|---|---|---|---|---|
| 0 | 46.70 | 120 | 51.78 | 240 | 69.75 |
| 10 | 52.25 | 130 | 48.37 | 250 | 68.85 |
| 20 | 56.15 | 140 | 45.10 | 260 | 67.61 |
| 30 | 58.80 | 150 | 40.53 | 270 | 64.44 |
| 40 | 60.64 | 160 | 41.80 | 280 | 62.25 |
| 50 | 62.30 | 170 | 45.39 | 290 | 61.29 |
| 60 | 66.22 | 180 | 50.11 | 300 | 57.81 |
| 70 | 66.12 | 190 | 55.04 | 310 | 53.40 |
| 80 | 64.11 | 200 | 59.57 | 320 | 48.50 |
| 90 | 64.98 | 210 | 62.00 | 330 | 44.55 |
| 100 | 59.25 | 220 | 65.17 | 340 | 43.84 |
| 110 | 57.01 | 230 | 67.84 | 350 | 42.74 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Zhang, K.; Liu, J.; Hu, K.; Huo, J.; Yan, S.; Zhang, Y. Mechanism of Low-Frequency Oscillation When Electric Multiple Units Pass Neutral Zone, and Suppression Method. Energies 2023, 16, 5848. https://doi.org/10.3390/en16155848
Sun J, Zhang K, Liu J, Hu K, Huo J, Yan S, Zhang Y. Mechanism of Low-Frequency Oscillation When Electric Multiple Units Pass Neutral Zone, and Suppression Method. Energies. 2023; 16(15):5848. https://doi.org/10.3390/en16155848
Chicago/Turabian StyleSun, Jixing, Kun Zhang, Jiyong Liu, Kaixuan Hu, Jindong Huo, Shengchun Yan, and Yan Zhang. 2023. "Mechanism of Low-Frequency Oscillation When Electric Multiple Units Pass Neutral Zone, and Suppression Method" Energies 16, no. 15: 5848. https://doi.org/10.3390/en16155848
APA StyleSun, J., Zhang, K., Liu, J., Hu, K., Huo, J., Yan, S., & Zhang, Y. (2023). Mechanism of Low-Frequency Oscillation When Electric Multiple Units Pass Neutral Zone, and Suppression Method. Energies, 16(15), 5848. https://doi.org/10.3390/en16155848