4.2. Fault Detection Results
In this section, we aim to assess and compare the performance of the ICA Double EWMA-based indicators on various types of faults in the wind turbine process. We evaluate the effectiveness of the following schemes: DICA-DEWMA-
, DICA-DEWMA-
, and DICA-DEWMA-SPE. To establish a baseline for comparison, we also consider other fault detection schemes, namely PCA-
, PCA-SPE, PCA-
-DEWMA, PCA-SPE-DEWMA, DPCA-
, DPCA-SPE, DPCA-
-DEWMA, DPCA-SPE-DEWMA, ICA-
, ICA-
, ICA-SPE, ICA-DEWMA-
, ICA-DEWMA-
, ICA-DEWMA-SPE, DICA-
, DICA-
, and DICA-SPE. Here, PCA-T2 and PCA-SPE schemes are considered baseline models due to their widespread use in fault detection applications [
51]. The PCA-
scheme monitors change in the principal components subspace, while the PCA-SPE scheme monitors the residual subspace. Based on PCA, these methods are well-established and commonly employed as benchmarks for comparison in fault detection studies.
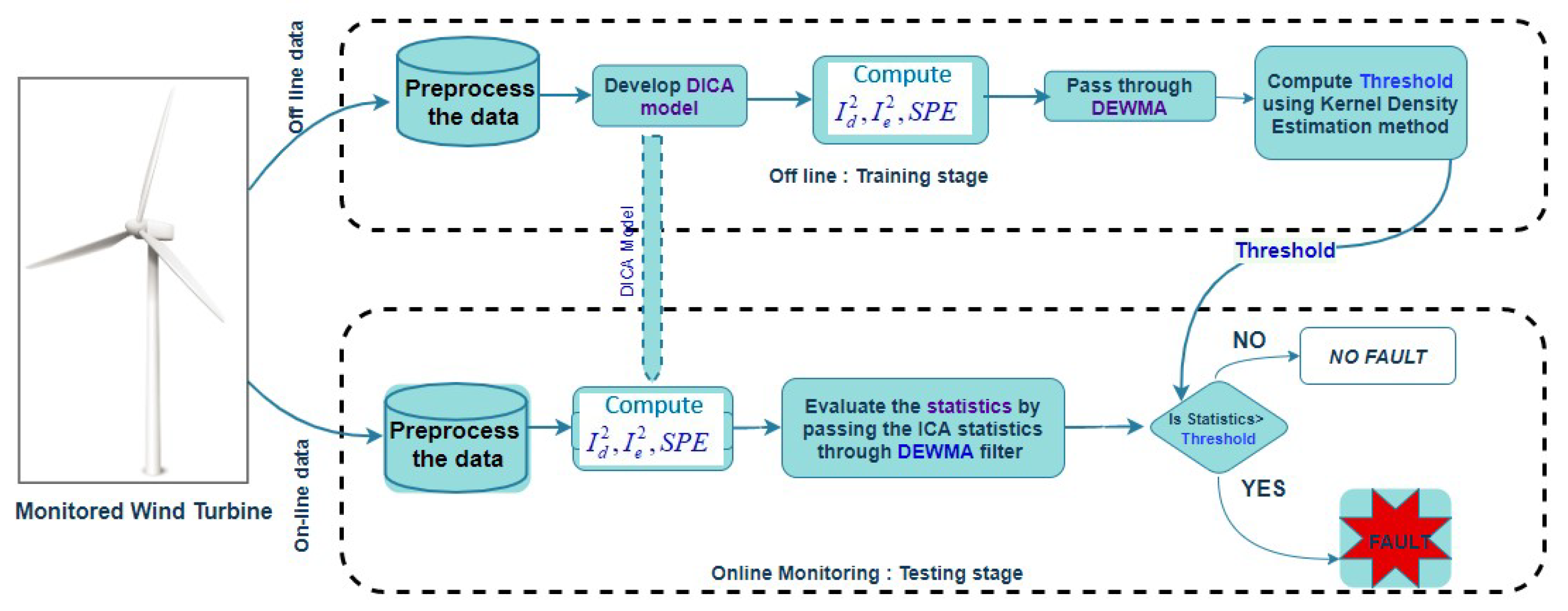
SCADA data contain vital information about a wind turbine’s operational and performance status. In this study, we utilize a dataset comprising 6000 data points for the model development stage. Additionally, we use 4000 data points to validate the proposed approach. The training data are collected over a specific period, ranging from 1 February 2017 to 14 March 2017. During this period, the historical SCADA data are employed to establish the necessary models and parameters for our fault detection approach. Subsequently, the testing data are recorded from 14 March 2017 to 11 April 2017. This dataset represents real-time SCADA data, which are used to evaluate the performance of the proposed approach in detecting and identifying various sensor fault types in wind turbines. By utilizing these distinct datasets for model development and validation, we ensure a rigorous and accurate assessment of the proposed DICA-DEWMA-based fault detection strategy. The PCA and ICA models are constructed using the training data, retaining nine Principal Components (PCs) and Independent Components (ICs). Similarly, the DPCA and DICA models are constructed using the training data, retaining 17 PCs and 17 ICs, respectively, employing the Cumulative Proportion of Variance (CPV) approach.
By contrasting the performance of these schemes against each other, we can gain insights into their effectiveness in detecting various types of faults in the wind turbine process. This evaluation allows us to identify the most robust and accurate fault detection strategy for wind turbine monitoring.
The proposed fault detection strategy will undergo evaluation using a set of simulated sensor faults. In real-world scenarios, recorded sensor data can be corrupted due to various types of sensor faults, including bias, drift, loss of accuracy, and degradation. In this study, we simulate these faults by introducing specific sensor faults, such as bias, drift, intermittent, freezing, and precision degradation. By introducing these simulated faults, we create scenarios where the faults are known, allowing for a systematic assessment of the different strategies. A summary of the fault scenarios considered in this study is presented in
Table 4. By evaluating the proposed strategy against these simulated fault scenarios, we can gain insights into its performance and compare it with other strategies.
The detection performance of the proposed fault detection strategy was assessed using various evaluation metrics, including False Positive Rate (FPR), True Positive Rate (TPR), Precision, Recall, and F1-score. The FPR measures the ratio of falsely detected faults to the total number of fault-free instances. It indicates the strategy’s ability to avoid false alarms and maintain a low rate of false positives.
The TPR, also known as sensitivity or recall, quantifies the proportion of actual faults that are correctly identified by the detection strategy. A high TPR indicates the strategy’s effectiveness in capturing and detecting real faults.
Precision measures the proportion of correctly identified faults out of all the instances identified as faults by the strategy. It reflects the strategy’s accuracy in correctly labeling true positives and avoiding false positives.
Recall, also referred to as sensitivity, is synonymous with the TPR. It represents the proportion of actual faults that are correctly detected by the strategy.
The F1-score combines precision and recall into a single metric that provides a balanced assessment of the detection strategy’s performance. It is the harmonic mean of precision and recall, providing a comprehensive evaluation of the strategy’s effectiveness in identifying faults while minimizing false positives.
By evaluating the strategy using these metrics, we can comprehensively understand its detection performance, including its ability to accurately detect faults, avoid false alarms, and strike a balance between precision and recall.
4.2.1. Detecting Sensor Bias Faults in Wind Turbine Gearbox Bearing Temperature
Bias sensor faults involve a systematic offset or bias in the sensor measurements. This fault introduces a constant error in the data, leading to inaccuracies in the readings. In the first scenario, we evaluated the monitoring of a sensor bias fault in the Gearbox bearing temperature (Gb2t) variable using the proposed DICA-DEWMA schemes. Detecting bias sensor faults in the Gb2t variable is of critical importance in wind turbine monitoring and maintenance. The Gearbox bearing temperature is a crucial parameter that reflects the health and performance of the gearbox system, which is a vital component in wind turbine operations. A bias sensor fault in the Gb2t variable can have significant implications for the overall performance and reliability of the wind turbine. It can lead to inaccurate temperature readings, which may result in incorrect assessments of the gearbox’s operating conditions. This can further lead to suboptimal maintenance decisions, increased downtime, and potential damage to the gearbox components. By accurately detecting bias sensor faults in the Gb2t variable, the monitoring system can provide timely alerts and notifications to the operators or maintenance personnel. This enables them to take corrective actions promptly, such as recalibrating or replacing the faulty sensor, ensuring accurate temperature measurements, and preventing any adverse effects on the gearbox’s operation. Furthermore, by detecting bias sensor faults, operators and maintenance personnel gain insights into the performance of the sensor network and its reliability. This information can be used to improve the overall sensor calibration and maintenance processes, ensuring the accuracy and integrity of the collected data.
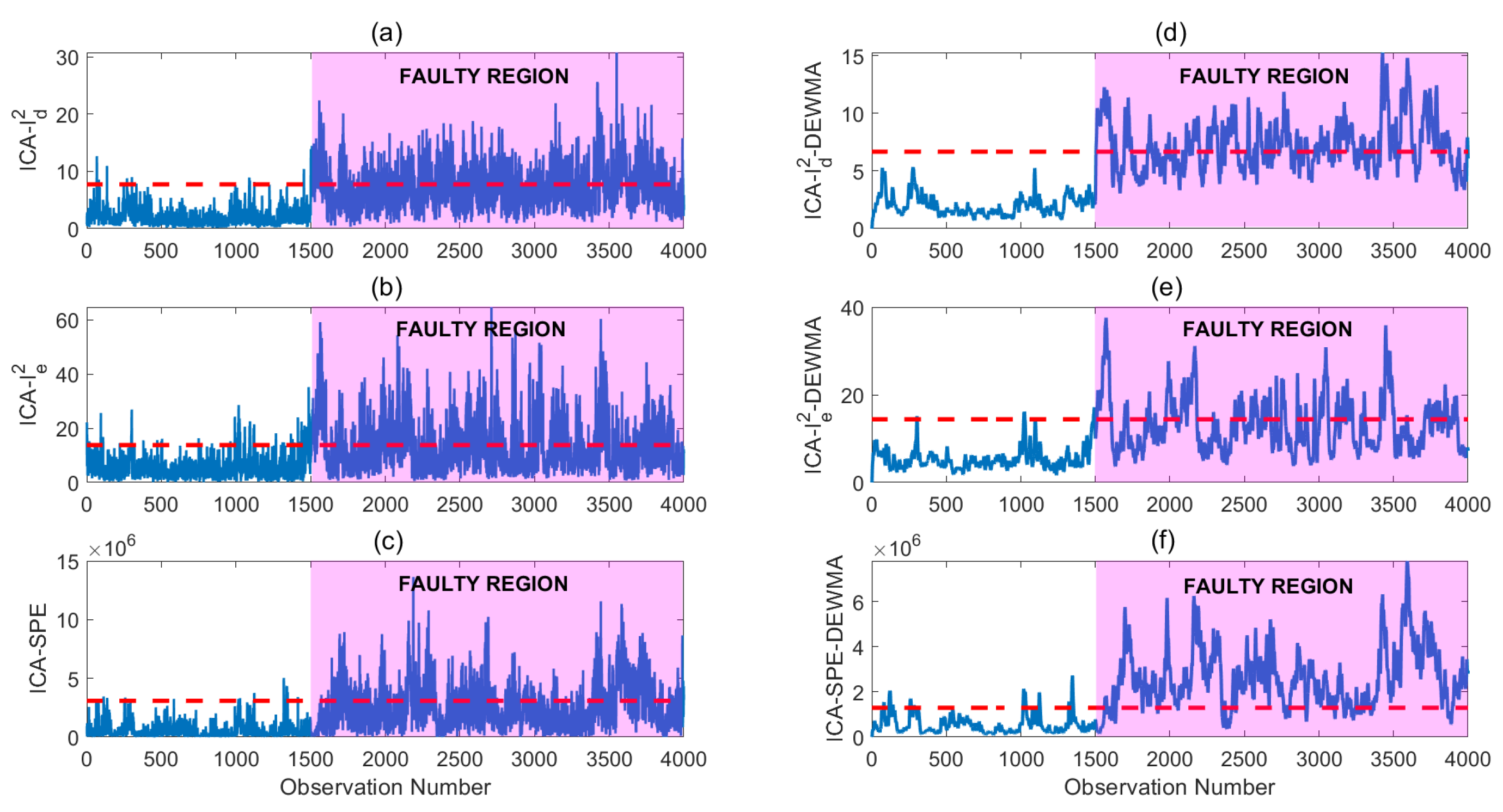
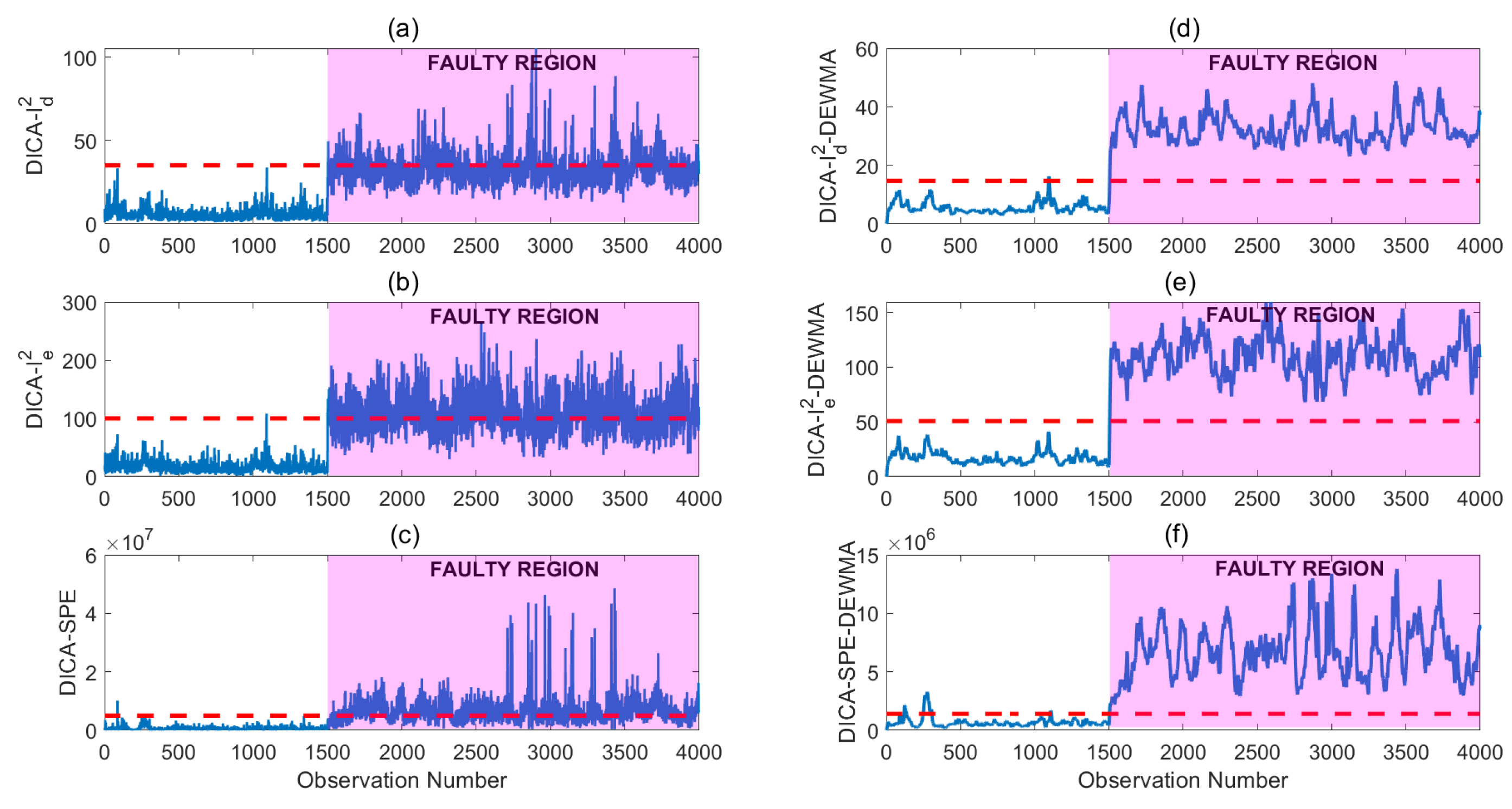
Here, a bias fault was introduced in the Gb2t variable, accounting for 15% of the total variation in that variable. The fault was introduced starting from the sampling time instant 1500 and continued until the end of the testing data. The purpose of this scenario was to assess the capability of the DICA-DEWMA scheme to detect and monitor the presence of a bias sensor fault in the Gb2t variable. By introducing a bias fault, we created an artificial condition where the variable exhibited a consistent and systematic shift from its normal behavior. This allowed us to evaluate the sensitivity and effectiveness of the DICA-DEWMA scheme in detecting such abnormal behavior. The result plots illustrating the performance of ICA and DICA-based indicators in detecting the bias fault are shown in
Figure 2 and
Figure 3.
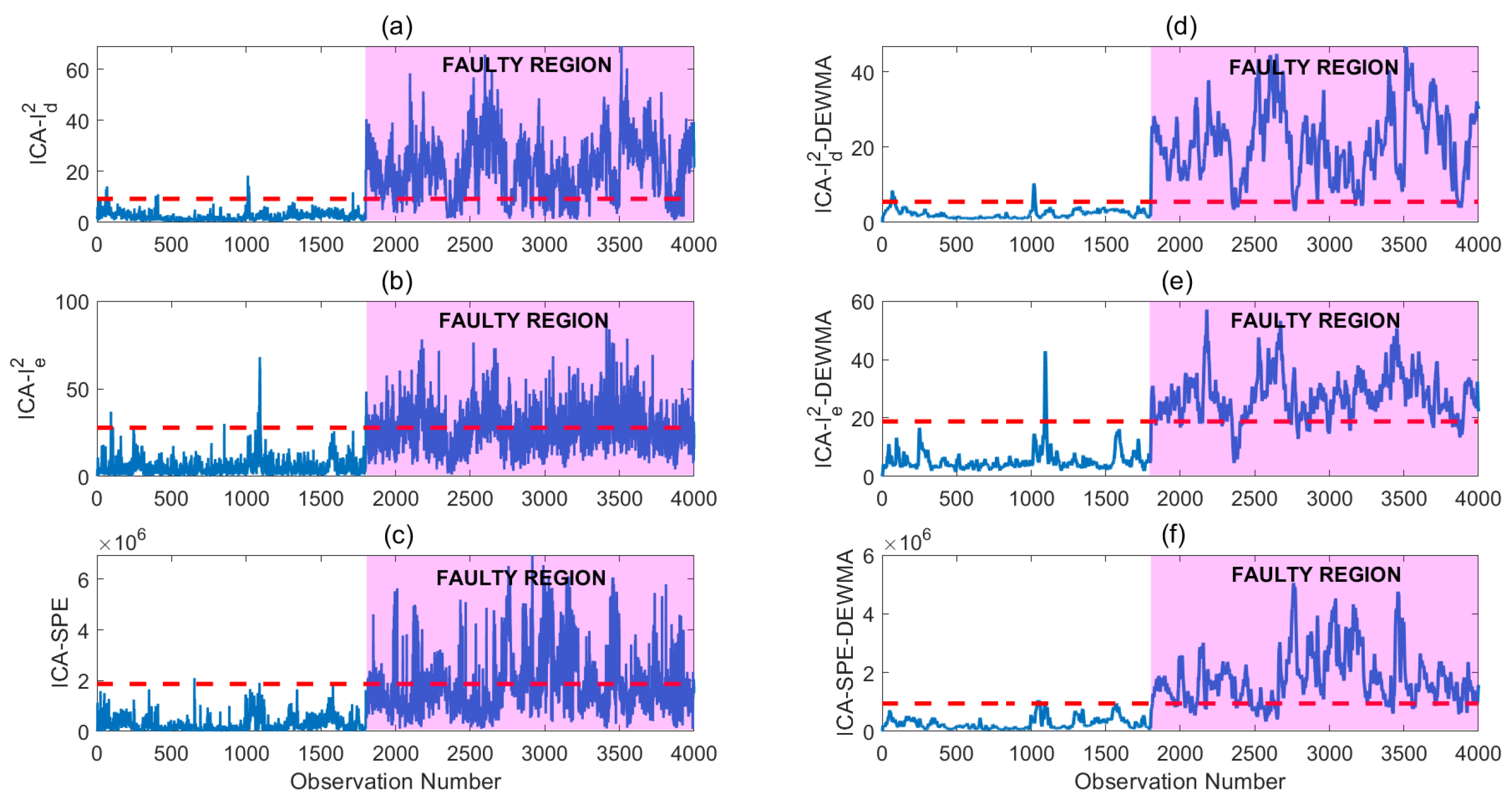
Upon visual inspection, it is evident that the conventional ICA indicators exhibit limitations in accurately identifying the fault. These indicators demonstrate a high number of missed detections and few false alarms, as observed in the plots (
Figure 2a–c). On the other hand, the ICA-DEWMA method performs relatively better in identifying the fault, but some missed detections are still noticeable within the fault region (
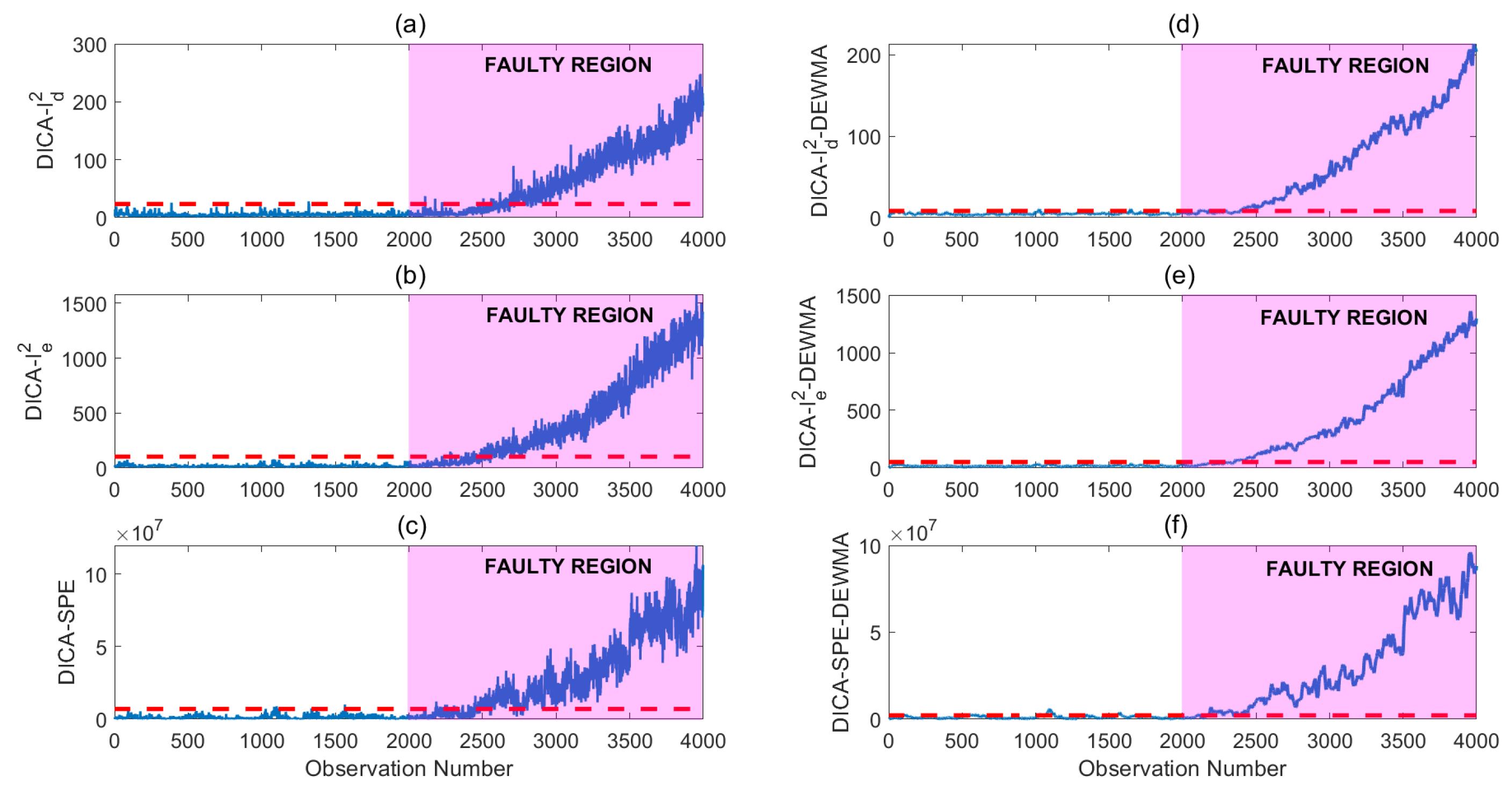
Figure 2d–f). In contrast, the DICA-based DEWMA indicators exhibit improved detection performance with minimal false alarms. Comparatively, the DICA-DEWMA strategy outperforms all other indicators in terms of fault detection within the fault region, as depicted in
Figure 3d–f. The DICA-DEWMA schemes provide enhanced sensitivity and accuracy in identifying the bias fault, resulting in a more reliable and precise fault detection capability.
The performance of various fault detection schemes in monitoring the bias fault is presented in
Table 5. Results in
Table 5 show that the PCA and PCA-DEWMA-based schemes exhibit poor performance, as indicated by their low F1-score values. These schemes fail to accurately detect the presence of the fault and also generate a few false alarms. On the other hand, the DPCA and DPCA-DEWMA-based schemes show slightly better performance with higher detection rates and F1-score values. The ICA and ICA-DEWMA-based schemes also struggle to identify the bias fault accurately, as shown by their F1-score values of 36.11%, 50.67%, 60.43%, 58.91%, 47.03%, and 89.81%.
Although the DICA-based schemes perform better than the conventional ICA-based schemes with no false alarms and improved detection rates, the fault detection is still not as precise as desired for an effective fault detection strategy. In contrast, the proposed DICA-DEWMA-based schemes outperform other methods for identifying the bias fault accurately. These schemes achieve excellent F1-score values of 100%, 100%, and 99.74%, respectively, indicating their superior performance compared to other schemes (
Table 5). Overall, the results emphasize the effectiveness of the DICA-DEWMA schemes in detecting and monitoring a bias sensor fault in the Gearbox bearing temperature variable, outperforming other evaluated schemes.
4.2.2. Detecting Precision Degradation Sensor Faults in Wind Turbine Generator Bearing Temperature
Degradation sensor fault represents a scenario where a sensor’s performance deteriorates gradually over time, leading to reduced accuracy and precision in the measurements. This type of fault can occur due to wear and tear, aging, or calibration drift in the sensor. In this case study, we aim to assess the effectiveness of the proposed approach in detecting sensor precision degradation faults, specifically in the Generator bearing temperature variable (Db1t). Detecting sensor precision degradation faults in the Db1t variable is critical in ensuring the reliable and accurate operation of the monitoring wind turbine. The Db1t is a crucial variable that provides insights into the health and performance of the generator bearing, which is a key component in the power generation of wind turbines. A sensor precision degradation fault in this variable refers to a gradual decline in the accuracy of the sensor measurements over time. This fault can occur due to various factors such as aging, wear, and tear, environmental conditions, or calibration issues. When the sensor’s precision degrades, the measurements it provides become less accurate, leading to potential inaccuracies in fault detection and decision-making processes.
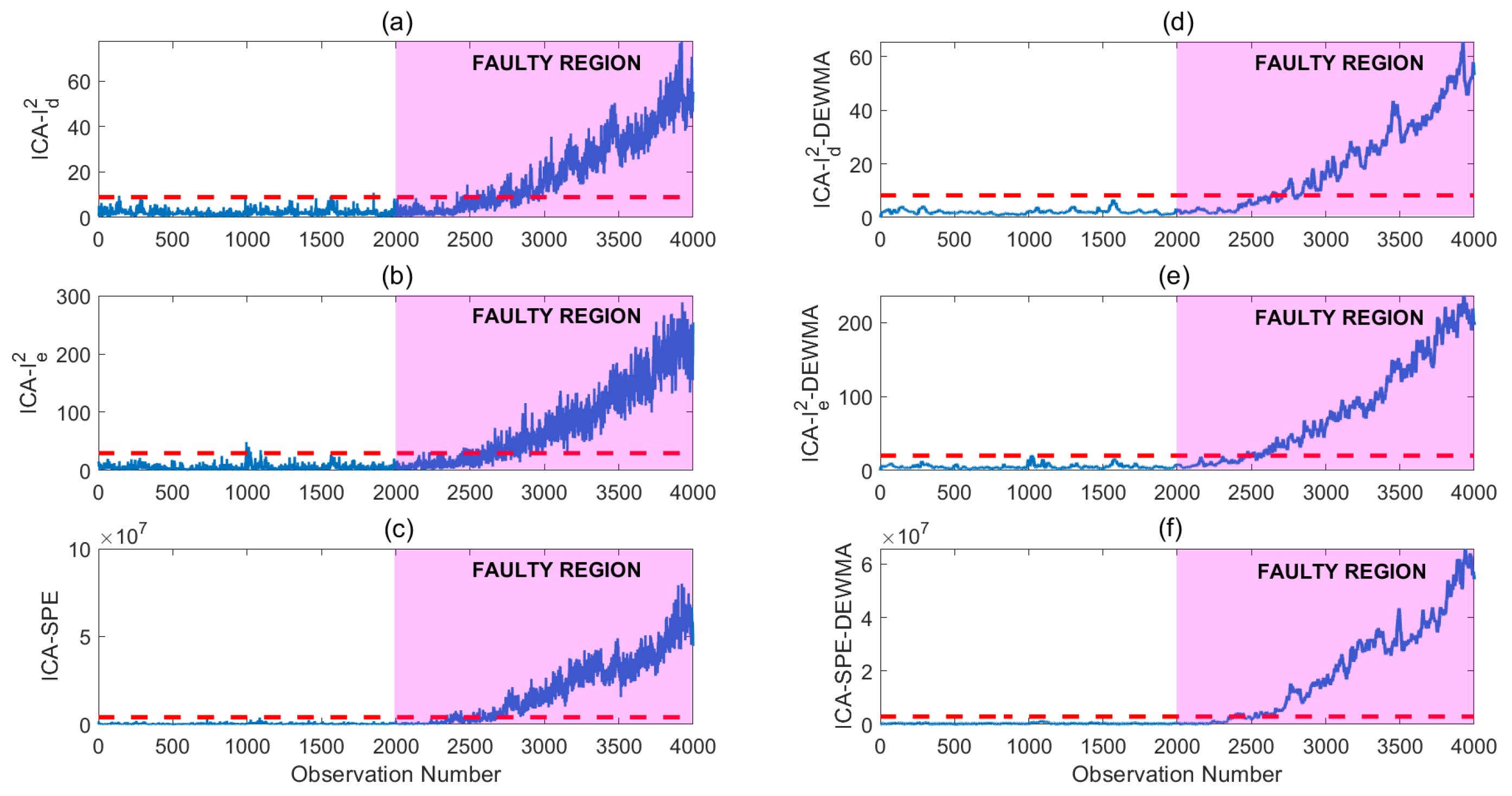
By introducing a precision degradation fault in the Db1t variable, we simulate a scenario where the sensor’s accuracy gradually diminishes between the sampling time instants 2000 and 4000 of the testing data. This allows us to evaluate the ability of the proposed approach to identify and monitor such degradation. To provide a comprehensive understanding, the detection performance of the ICA, ICA-DEWMA, DICA, and DICA-DEWMA based indicators is visually represented through time-series graphs in
Figure 4 and
Figure 5. These graphs illustrate the behavior of the different schemes in detecting the precision degradation fault. While the ICA-based schemes exhibit the ability to detect the fault with a slight delay, the DICA-DEWMA-based scheme demonstrates an advantage by detecting the fault earlier than the other schemes.
The evaluation results are summarized in
Table 6, which compares the detection performance of various fault detection schemes. It is observed that the PCA-
and PCA-
-DEWMA schemes exhibit high false alarm rates and relatively lower detection rates compared to other methods. On the contrary, the remaining schemes demonstrate satisfactory detection of the precision degradation fault, as indicated by their favorable F1-score values in the table. Of particular interest is the superior performance of the DICA-DEWMA scheme among the evaluated approaches. It achieves improved F1-scores of 91.30%, 92%, and 94%, respectively, indicating its effectiveness in detecting and monitoring the precision degradation fault. This performance enhancement can be attributed to combining the DICA technique, which captures process dynamics more accurately by incorporating historical data, and the DEWMA approach, which applies a moving average scheme to conventional statistics for improved fault detection.
Overall, evaluating the proposed approach for detecting sensor precision degradation faults in the Dbt variable highlights its effectiveness and superiority over other fault detection schemes. By incorporating historical data and applying the DEWMA technique, the DICA-DEWMA scheme demonstrates improved detection performance.
4.2.3. Freezing Sensor Fault Detection in Wind Turbine Anemometer
Freezing sensor fault represents a scenario where a sensor becomes stuck at a particular reading and fails to update its measurements. It simulates situations where sensor data becomes stagnant or unresponsive. In this case study, we focus on monitoring freeze faults using the proposed DICA-DEWMA scheme. Detecting freezing sensor faults in the anemometer on the nacelle of a wind turbine is crucial for accurate wind measurement, turbine performance optimization, and overall operational efficiency. These faults can lead to inaccurate wind data, compromising turbine control and energy production. Continuous monitoring of sensor performance contributes to overall system health and long-term reliability. Overall, detecting freezing sensor faults is essential for safe and efficient wind turbine operation, enabling operators to maximize energy production and minimize costs.
Here, a freeze fault is introduced in variable Ws1, where the temperature value remains at 77.7 degrees between sampling time instants 2000 and 4000 of the testing data. The goal is to evaluate the performance of different fault detection methods in identifying this freeze fault. To provide a visual representation of the detection performance,
Figure 6 and
Figure 7 present the time-series graphs of the ICA, ICA-DEWMA, DICA, and DICA-DEWMA-based indicators. These graphs depict the evolution of fault indicators over time. Notably,
Figure 7d–f highlights the superiority of the proposed DICA-DEWMA fault detection scheme over other methods in terms of fault detection.
Table 7 provides an overview of the performance of various methods in detecting the freeze fault. The PCA-
and PCA-
-DEWMA schemes show lower F1-score values, indicating more false alarms than other methods. On the other hand, the DPCA-DEWMA, ICA, ICA-DEWMA, and DICA-based schemes exhibit better identification of the freeze fault, as shown by their higher F1-score values. However, none of the methods can completely detect the sensor fault. The DICA-based DEWMA schemes demonstrate higher F1-score values due to the sensitivity of the DEWMA scheme in detecting small changes. This makes the DICA-DEWMA scheme more robust than other methods, improving its performance in identifying the freeze fault.
4.2.4. Detecting Sensor Bias Faults in Wind Turbine Generator Speed
This scenario focuses on monitoring sensor bias faults in wind turbine generator speed. Bias faults are commonly observed in wind turbines and can significantly impact their performance. The speed of the generator directly affects the power generation capability and overall performance of the turbine. A bias fault in the speed sensor can lead to inaccurate measurements, causing deviations in the actual generator speed. This can result in suboptimal turbine operation, reduced energy output, and potential mechanical stress on the turbine components. By detecting and monitoring sensor bias faults, it is possible to identify deviations from the expected speed behavior and take corrective actions promptly. This helps maintain the turbine’s operational integrity, optimize power generation, and minimize the risk of costly failures or downtime. Additionally, accurate speed measurements are essential for effectively controlling and coordinating wind turbine arrays, ensuring grid stability and efficient power integration. Therefore, detecting sensor bias faults in wind turbine Generator speed is crucial in enhancing turbine performance, reliability, and overall wind energy production.
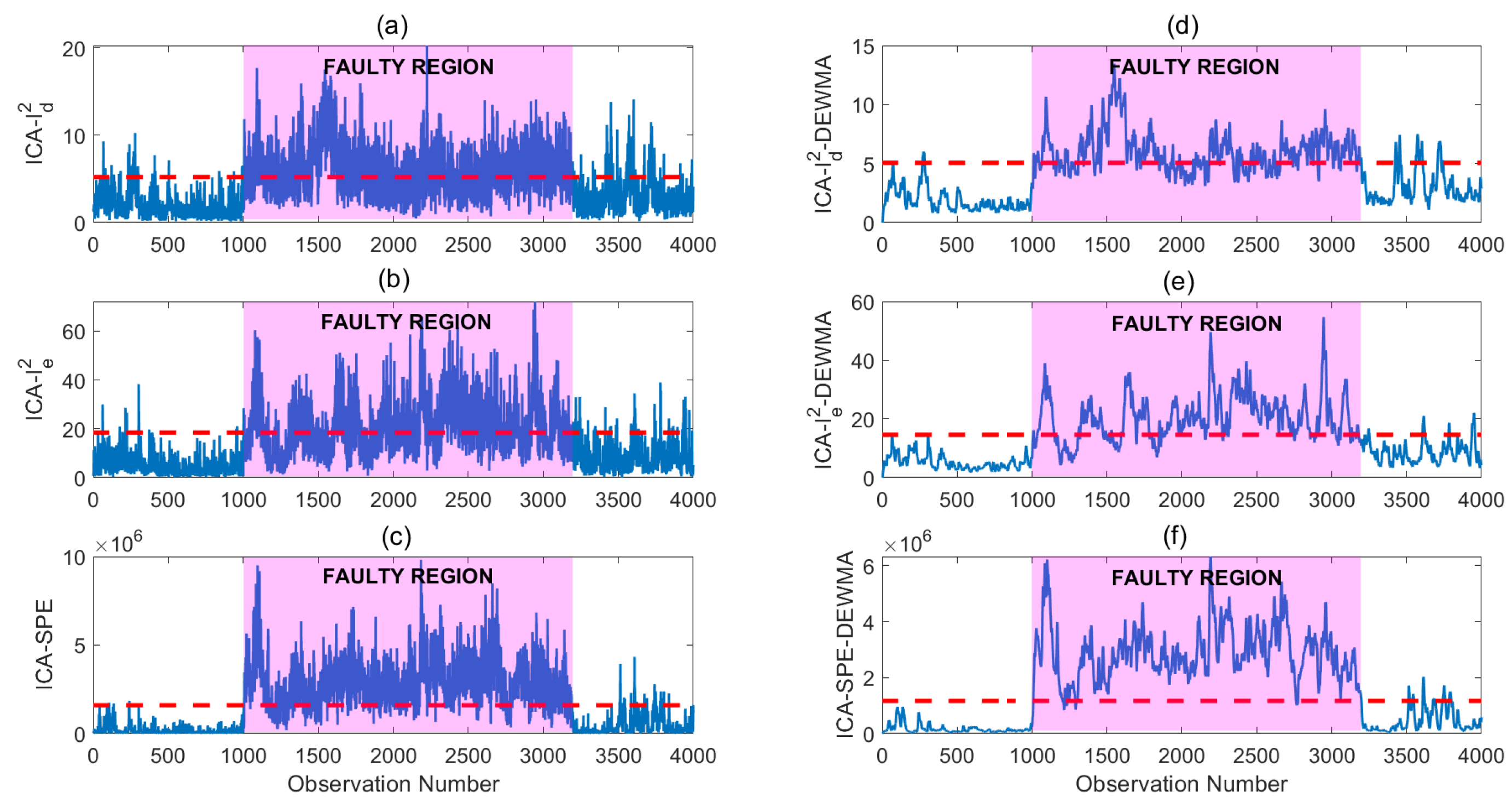
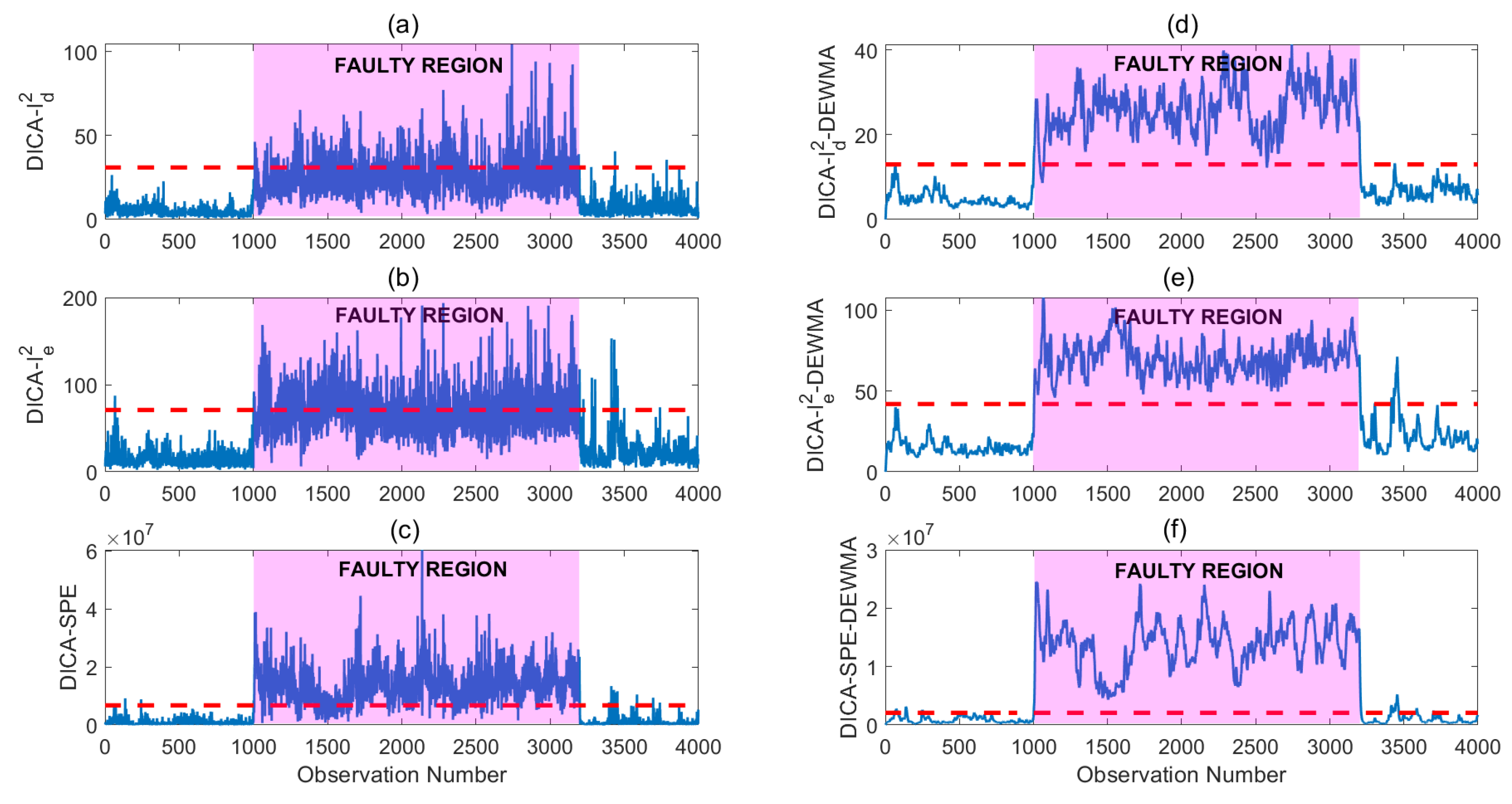
Here, we analyze the bias fault in the generator variable Ds, which occurs at the sampling time instant 1000 and diminishes at 3200.
Figure 8 and
Figure 9 show the detection results of the investigated monitoring ICA and DICA-based fault detection methods.
Table 8 provides a comprehensive summary of the performance of various methods based on these metrics. The
fault indicator in PCA and DPCA-based schemes exhibit a high FAR and low FDR, leading to low F1-score values. On the other hand, the SPE indicator in PCA and DPCA-based schemes demonstrate a low FAR and improved FDR compared to the
indicator, but it still falls short in providing effective fault detection.
4.2.5. Detecting Sensor Precision Degradation Fault in Wind Turbine Generator Speed
In this last experiment, we focus on the detection of sensor precision degradation faults in the Generator Speed (Ds) variable using the proposed DICA-DEWMA approach. The accurate monitoring of sensor precision degradation in Ds is crucial for maintaining the reliable and efficient operation of wind turbines. By identifying and addressing these faults promptly, potential performance issues and costly downtime can be mitigated, ensuring optimal turbine performance and prolonging the lifespan of the equipment. This fault gradually diminishes between the sampling time instants 2000 and 4000 of the testing data.
Table 9 summarizes the obtained detection results by the investigated PCA, ICA, DPCA, and DICA-based monitoring methods. We observe that DICA-based DEWMA schemes outperformed the other methods in detecting this sensor precision degradation fault with better F1-score value as compared to the other methods.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}