

Common Architectures and Devices for Current Source Inverter in Motor-Drive Applications: A Comprehensive Review

 ,
,  , , ,
, , ,  ,
,  and
and 
Abstract
1. Introduction
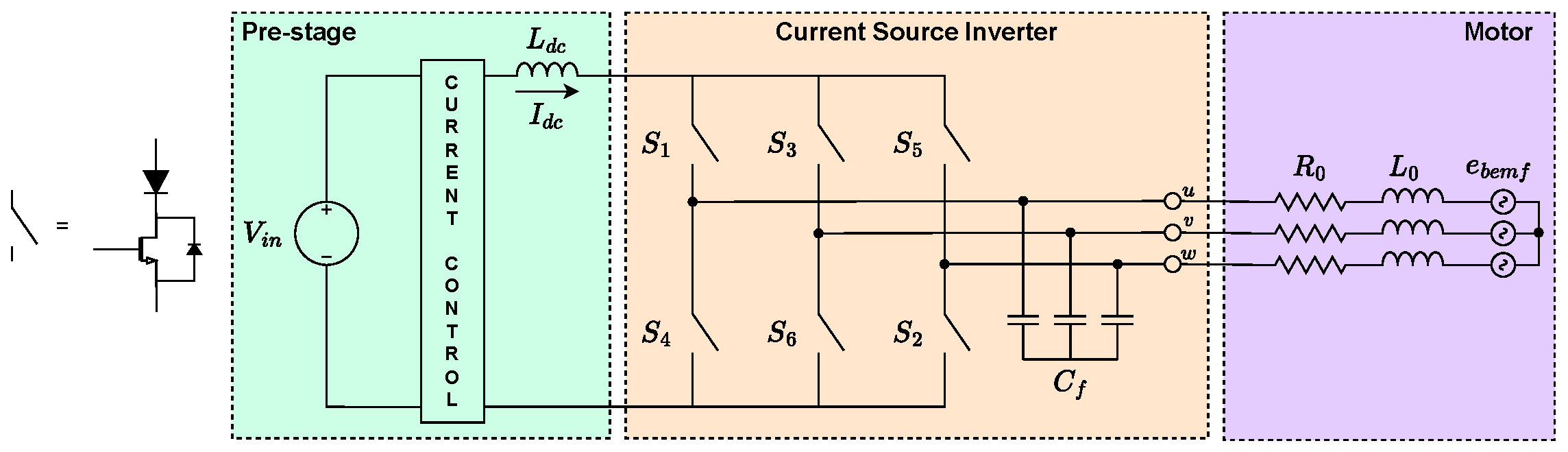
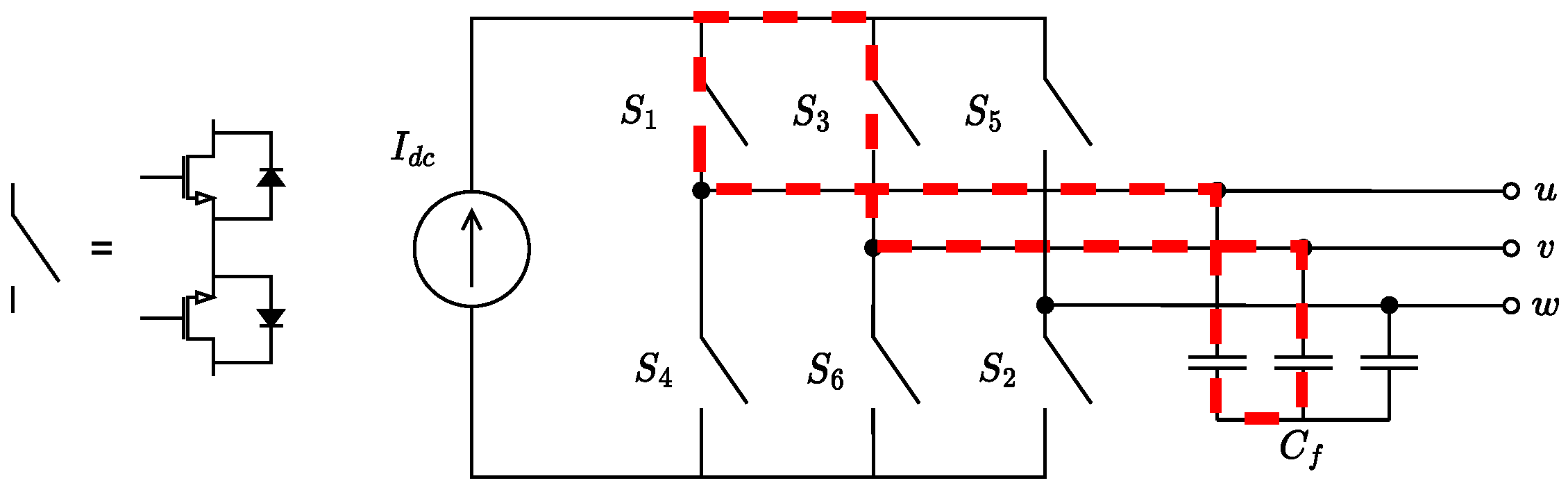
2. Current-Source Inverter: Architecture and Working Principle
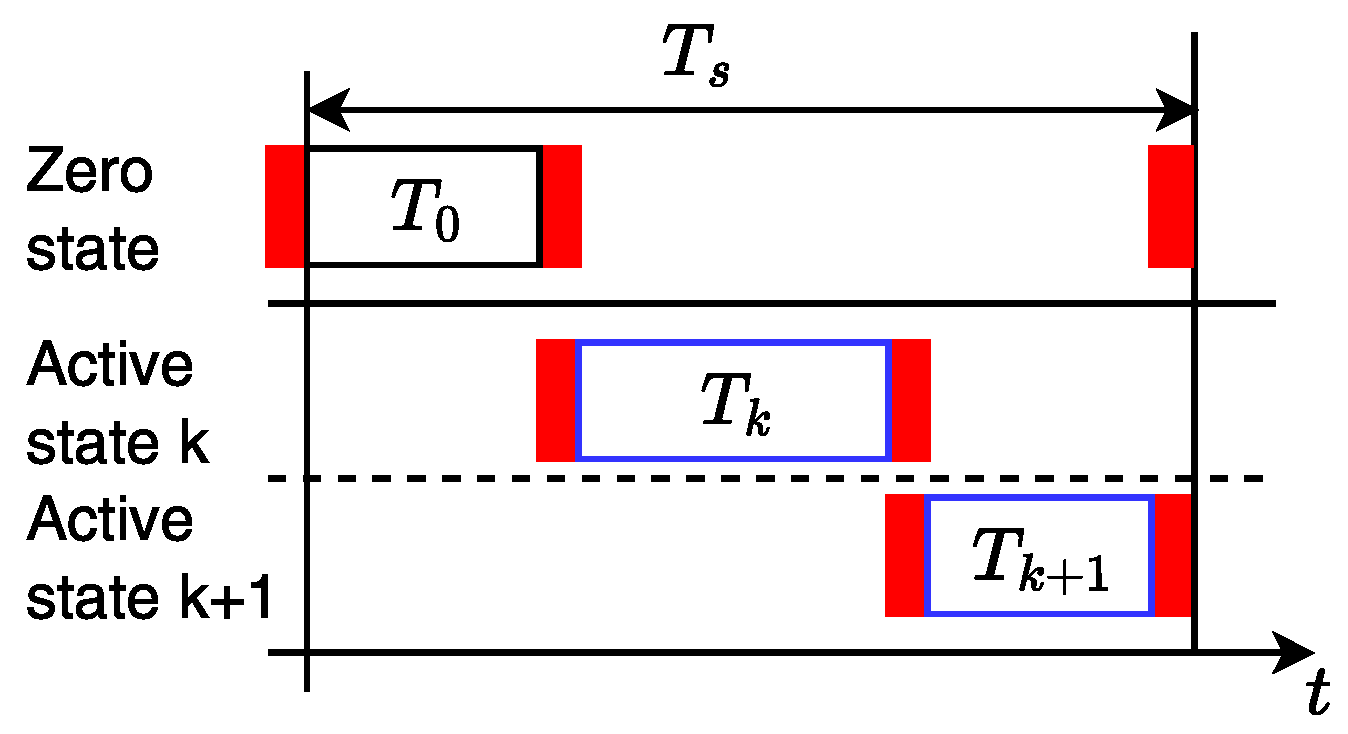
- There must always be a current path for DC-link inductor current to avoid overvoltage. This is obtained by imposing an overlap time during commutation between states as in Figure 4;
- There must not be short circuit between output filter capacitors. This is achieved using unidirectional RVB switches, typically obtained with a transistor and an in-series diode, as in Figure 1.
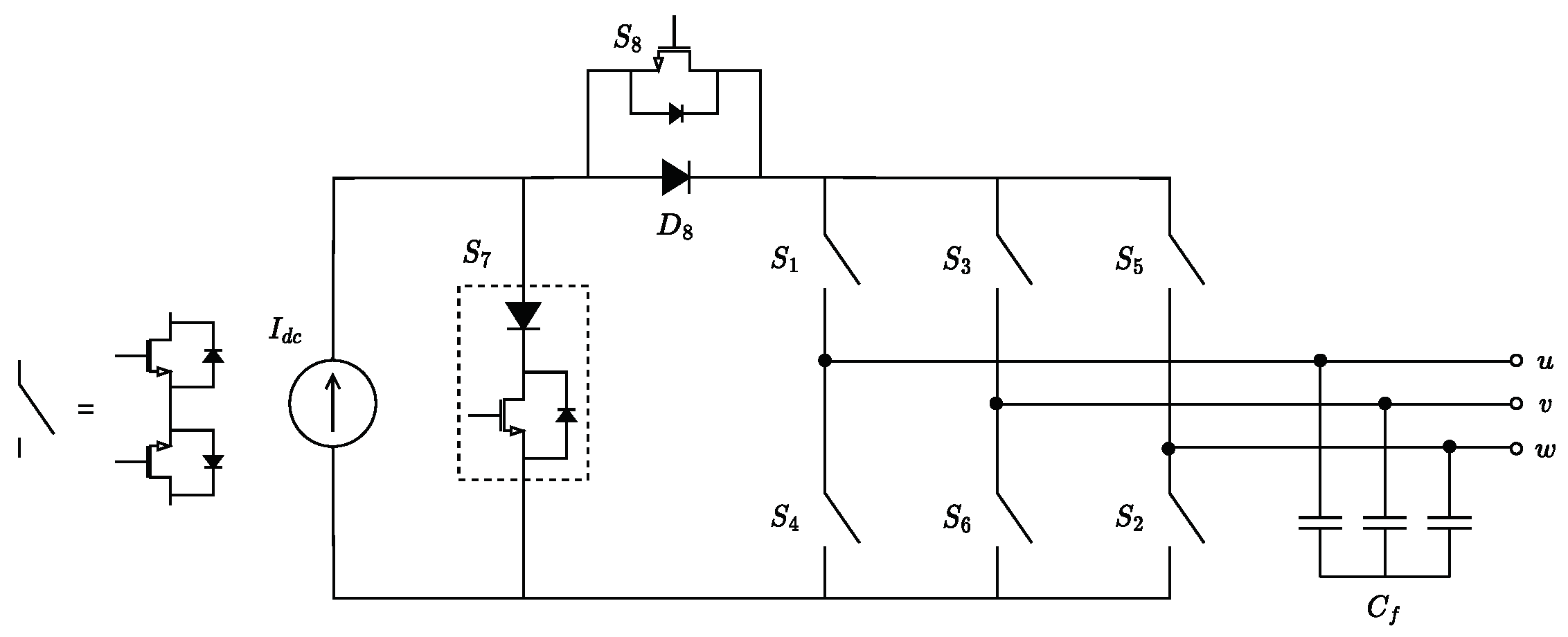
2.1. Seven Switch Topology: CSI7
2.2. Seven Switch Topology: CSI with Tri-State
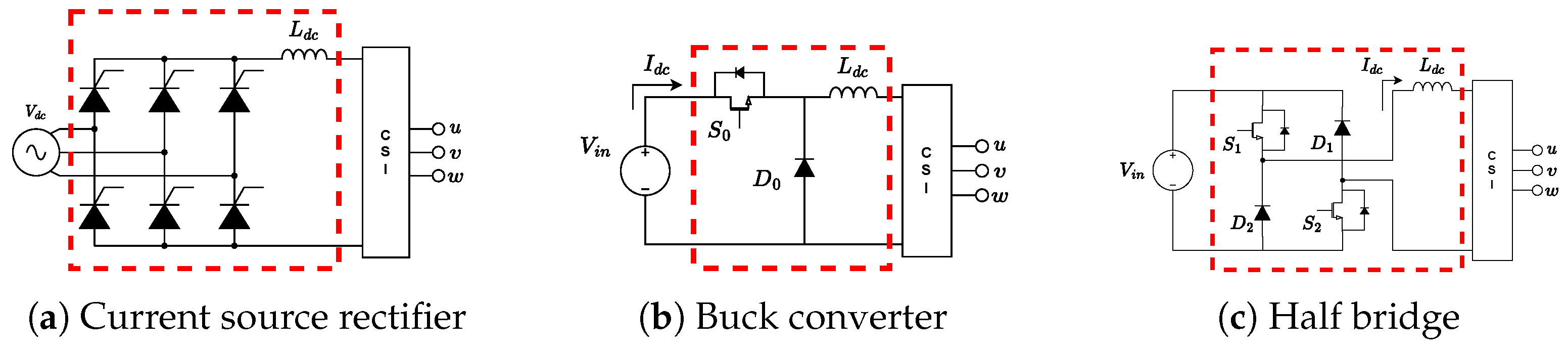
2.3. DC Current Control
2.4. Resonance in Motor Drive Application
- i
- Classical FOC control with feedforward decoupling;
- ii
- Classical FOC control with feedforward decoupling and series active damping;
- iii
- Classical FOC control with feedforward decoupling and parallel active damping;
- iv
- Complex vector with decoupling control (based on [36]);
- v
- Complex vector with decoupling control and series active damping;
- vi
- Complex vector with decoupling control and parallel active damping.
3. Use of Wide-Bandgap Switches
3.1. Properties of Wide-Bandgap Materials
3.2. WBG in VSI and CSI
3.3. Improving CSI Performances with WBG Switches
3.4. WBG: EMI and Common-Mode Voltages Problem
3.5. WBG: Summary of Shown Solutions
4. Conclusions
- Reduce semiconductor power loss, thanks to lower on-resistance;
- Can operate at higher temperatures, allowing one to integrate the motor drive;
- Allow for increasing switching frequency, hence decreasing the size of passive and cooling elements;
- Are not suitable for VSI, because of high s and EMI issues, which reduce device performance in practical applications.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Torres, R.A.; Dai, H.; Lee, W.; Jahns, T.M.; Sarlioglu, B. Development of Current-Source-Inverter-based Integrated Motor Drives using Wide-Bandgap Power Switches. In Proceedings of the 2019 IEEE 15th Brazilian Power Electronics Conference and 5th IEEE Southern Power Electronics Conference (COBEP/SPEC), Santos, Brazil, 1–4 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Wu, B.; Narimani, M. PWM Current Source Inverters. In High-Power Converters and AC Drives; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2017; Chapter 10; pp. 225–256. [Google Scholar] [CrossRef]
- Dai, H.; Torres, R.A.; Chen, F.; Jahns, T.M.; Sarlioglu, B. An H8 Current-Source Inverter Using Single-Gate WBG Bidirectional Switches. IEEE Trans. Transp. Electrif. 2023, 9, 1311–1329. [Google Scholar] [CrossRef]
- Kwak, S.; Kim, T. An Integrated Current Source Inverter with Reactive and Harmonic Power Compensators. IEEE Trans. Power Electron. 2009, 24, 348–357. [Google Scholar] [CrossRef]
- Sebastian, C.R.; Rajeevan, P.P. Load-Commutated SCR-Based Current Source Inverter Fed Induction Motor Drive with Open-End Stator Windings. IEEE Trans. Ind. Electron. 2018, 65, 2031–2038. [Google Scholar] [CrossRef]
- Beig, A.R.; Ranganathan, V.T. A novel CSI-fed induction motor drive. IEEE Trans. Power Electron. 2006, 21, 1073–1082. [Google Scholar] [CrossRef]
- Chen, H.C.; Huang, H.H. Design of buck-type current source inverter fed brushless DC motor drive and its application to position sensorless control with square-wave current. IET Electr. Power Appl. 2013, 7, 416–426. [Google Scholar] [CrossRef]
- Dai, H.; Torres, R.A.; Gossmann, J.; Lee, W.; Jahns, T.M.; Sarlioglu, B. A Seven-Switch Current-Source Inverter Using Wide Bandgap Dual-Gate Bidirectional Switches. IEEE Trans. Ind. Appl. 2022, 58, 3721–3737. [Google Scholar] [CrossRef]
- Madonna, V.; Migliazza, G.; Giangrande, P.; Lorenzani, E.; Buticchi, G.; Galea, M. The Rebirth of the Current Source Inverter: Advantages for Aerospace Motor Design. IEEE Ind. Electron. Mag. 2019, 13, 65–76. [Google Scholar] [CrossRef]
- Migliazza, G.; Buticchi, G.; Carfagna, E.; Lorenzani, E.; Madonna, V.; Giangrande, P.; Galea, M. DC Current Control for a Single-Stage Current Source Inverter in Motor Drive Application. IEEE Trans. Power Electron. 2021, 36, 3367–3376. [Google Scholar] [CrossRef]
- Lorenzani, E.; Migliazza, G.; Immovilli, F.; Bianchini, C.; Buticchi, G. Ground Leakage Current in PV Three-Phase Current Source Inverter Topologies. In Proceedings of the 43rd Annual Conference of the IEEE Industrial Electronics Society (IECON 2017), Beijing, China, 29 October–1 November 2017; pp. 4221–4226. [Google Scholar] [CrossRef]
- Lorenzani, E.; Immovilli, F.; Migliazza, G.; Frigieri, M.; Bianchini, C.; Davoli, M. CSI7: A Modified Three-Phase Current-Source Inverter for Modular Photovoltaic Applications. IEEE Trans. Ind. Electron. 2017, 64, 5449–5459. [Google Scholar] [CrossRef]
- Sayed, E.; Abdalmagid, M.; Pietrini, G.; Sa’adeh, N.M.; Callegaro, A.D.; Goldstein, C.; Emadi, A. Review of Electric Machines in More-/Hybrid-/Turbo-Electric Aircraft. IEEE Trans. Transp. Electrif. 2021, 7, 2976–3005. [Google Scholar] [CrossRef]
- Buticchi, G.; Wheeler, P.; Boroyevich, D. The More-Electric Aircraft and Beyond. Proc. IEEE 2023, 111, 356–370. [Google Scholar] [CrossRef]
- Madonna, V.; Giangrande, P.; Zhao, W.; Zhang, H.; Gerada, C.; Galea, M. Electrical Machines for the More Electric Aircraft: Partial Discharges Investigation. IEEE Trans. Ind. Appl. 2021, 57, 1389–1398. [Google Scholar] [CrossRef]
- Zhang, Y.; Peng, G.O.H.; Banda, J.K.; Dasgupta, S.; Husband, M.; Su, R.; Wen, C. An Energy Efficient Power Management Solution for a Fault-Tolerant More Electric Engine/Aircraft. IEEE Trans. Ind. Electron. 2019, 66, 5663–5675. [Google Scholar] [CrossRef]
- Enalou, H.B.; Lang, X.; Rashed, M.; Bozhko, S. Time-Scaled Emulation of Electric Power Transfer in the More Electric Engine. IEEE Trans. Transp. Electrif. 2020, 6, 1679–1694. [Google Scholar] [CrossRef]
- Tosetti, M.; Maggiore, P.; Cavagnino, A.; Vaschetto, S. Conjugate Heat Transfer Analysis of Integrated Brushless Generators for More Electric Engines. IEEE Trans. Ind. Appl. 2014, 50, 2467–2475. [Google Scholar] [CrossRef]
- Wiechmann, E.P.; Aqueveque, P.; Burgos, R.; Rodriguez, J. On the Efficiency of Voltage Source and Current Source Inverters for High-Power Drives. IEEE Trans. Ind. Electron. 2008, 55, 1771–1782. [Google Scholar] [CrossRef]
- Amorim Torres, R.; Dai, H.; Lee, W.; Sarlioglu, B.; Jahns, T. Current-Source Inverter Integrated Motor Drives Using Dual-Gate Four-Quadrant Wide-Bandgap Power Switches. IEEE Trans. Ind. Appl. 2021, 57, 5183–5198. [Google Scholar] [CrossRef]
- Morya, A.K.; Gardner, M.C.; Anvari, B.; Liu, L.; Yepes, A.G.; Doval-Gandoy, J.; Toliyat, H.A. Wide Bandgap Devices in AC Electric Drives: Opportunities and Challenges. IEEE Trans. Transp. Electrif. 2019, 5, 3–20. [Google Scholar] [CrossRef]
- Sahan, B.; Araújo, S.V.; Nöding, C.; Zacharias, P. Comparative Evaluation of Three-Phase Current Source Inverters for Grid Interfacing of Distributed and Renewable Energy Systems. IEEE Trans. Power Electron. 2011, 26, 2304–2318. [Google Scholar] [CrossRef]
- Wei, Q.; Xing, L.; Xu, D.; Wu, B.; Zargari, N.R. Modulation Schemes for Medium-Voltage PWM Current Source Converter-Based Drives: An Overview. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 1152–1161. [Google Scholar] [CrossRef]
- Liu, P.; Wang, Z.; Xu, Y.; Zou, Z.; Deng, F.; Li, Y. Improved Harmonic Profile for High-Power PWM Current-Source Converters with Modified Space-Vector Modulation Schemes. IEEE Trans. Power Electron. 2021, 36, 11234–11244. [Google Scholar] [CrossRef]
- Geng, Y.; Deng, R.; Dong, W.; Wang, K.; Liu, H.; Wu, X. An Overlap-Time Compensation Method for Current-Source Space-Vector PWM Inverters. IEEE Trans. Power Electron. 2018, 33, 3192–3203. [Google Scholar] [CrossRef]
- Gaber, M.; Abdel-Rahim, O.; Orabi, M. Novel Overlap Method to Eliminate Vector Deviation Error in SVM of Current Source Inverters. IEEE Trans. Power Electron. 2021, 36, 2320–2333. [Google Scholar] [CrossRef]
- Akbar, F.; Cha, H.; Do, D.T. CSI7: Novel Three-Phase Current-Source Inverter with Improved Reliability. IEEE Trans. Power Electron. 2021, 36, 9170–9182. [Google Scholar] [CrossRef]
- Miao, Y.; Liao, W.; Huang, S.; Liu, P.; Wu, X.; Song, P.; Li, G. DC-Link Current Minimization Scheme for IM Drive System Fed by Bidirectional DC Chopper-Based CSI. IEEE Trans. Transp. Electrif. 2022, 9, 2839–2850. [Google Scholar] [CrossRef]
- Wang, H.; Blaabjerg, F. Reliability of Capacitors for DC-Link Applications in Power Electronic Converters—An Overview. IEEE Trans. Ind. Appl. 2014, 50, 3569–3578. [Google Scholar] [CrossRef]
- Loh, P.C.; Blaabjerg, F.; Wong, C.P.; Tan, P.C. Tri-State Current Source Inverter with Improved Dynamic Performance. IEEE Trans. Power Electron. 2008, 23, 1631–1640. [Google Scholar] [CrossRef]
- Xu, Y.; Wang, Z.; Liu, P.; He, J. A Soft-Switching Current-Source-Inverter-Fed Motor Drive with Reduced Common-Mode Voltage. IEEE Trans. Ind. Electron. 2021, 68, 3012–3021. [Google Scholar] [CrossRef]
- Yang, S.; Yin, Z.; Tong, C.; Sui, Y.; Zheng, P. Active Damping Current Control for Current-Source Inverter-Based PMSM Drives. IEEE Trans. Ind. Electron. 2023, 70, 3549–3560. [Google Scholar] [CrossRef]
- Torres, R.A.; Dai, H.; Lee, W.; Jahns, T.M.; Sarlioglu, B. A Simple and Robust Controller Design for High-Frequency WBG-Based Current-Source-Inverter-Fed AC Motor Drive. In Proceedings of the 2020 IEEE Transportation Electrification Conference & Expo (ITEC), Chicago, IL, USA, 23–26 June 2020; pp. 111–117. [Google Scholar] [CrossRef]
- Lee, H.J.; Jung, S.; Sul, S.K. A Current Controller Design for Current Source Inverter-Fed AC Machine Drive System. IEEE Trans. Power Electron. 2013, 28, 1366–1381. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, B.; Xu, D.; Zargari, N.R. A Current-Source-Converter-Based High-Power High-Speed PMSM Drive with 420-Hz Switching Frequency. IEEE Trans. Ind. Electron. 2012, 59, 2970–2981. [Google Scholar] [CrossRef]
- Briz, F.; Degner, M.; Lorenz, R. Analysis and design of current regulators using complex vectors. IEEE Trans. Ind. Appl. 2000, 36, 817–825. [Google Scholar] [CrossRef]
- Shirabe, K.; Swamy, M.; Kang, J.K.; Hisatsune, M.; Wu, Y.; Kebort, D.; Honea, J. Advantages of high frequency PWM in AC motor drive applications. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; pp. 2977–2984. [Google Scholar] [CrossRef]
- Kolar, J.W.; Huber, J. Next-Generation SiC/GaN Three-Phase Variable-Speed Drive Inverter Concepts. In PCIM Europe Digital Days 2021; International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management; VDE VERLAG: Berlin, Germany, 2021; pp. 1–5. [Google Scholar]
- Swamy, M.M.; Kang, J.K.; Shirabe, K. Power Loss, System Efficiency, and Leakage Current Comparison Between Si IGBT VFD and SiC FET VFD with Various Filtering Options. IEEE Trans. Ind. Appl. 2015, 51, 3858–3866. [Google Scholar] [CrossRef]
- Dai, H.; Jahns, T.M.; Torres, R.A.; Han, D.; Sarlioglu, B. Comparative Evaluation of Conducted Common-Mode EMI in Voltage-Source and Current-Source Inverters using Wide-Bandgap Switches. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018; pp. 788–794. [Google Scholar] [CrossRef]
- Wang, W.; Gao, F.; Yang, Y.; Blaabjerg, F. Operation and Modulation of H7 Current-Source Inverter with Hybrid SiC and Si Semiconductor Switches. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 387–399. [Google Scholar] [CrossRef]
- Riegler, B.; Mütze, A. Volume Comparison of Passive Components for Hard-Switching Current- and Voltage-Source-Inverters. In Proceedings of the 2021 IEEE Energy Conversion Congress and Exposition (ECCE), Vancouver, BC, Canada, 10–14 October 2021; pp. 1902–1909. [Google Scholar] [CrossRef]
- Wang, J.; Li, Y.; Han, Y. Integrated Modular Motor Drive Design with GaN Power FETs. IEEE Trans. Ind. Appl. 2015, 51, 3198–3207. [Google Scholar] [CrossRef]
- Torres, R.A.; Dai, H.; Lee, W.; Jahns, T.M.; Sarlioglu, B. Current-Source Inverters for Integrated Motor Drives using Wide-Bandgap Power Switches. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018; pp. 1002–1008. [Google Scholar] [CrossRef]
- Dai, H.; Torres, R.A.; Lee, W.; Jahns, T.M.; Sarlioglu, B. Integrated Motor Drive using Soft-Switching Current-Source Inverters with SiC- and GaN-based Bidirectional Switches. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 2372–2378. [Google Scholar] [CrossRef]
- Dai, H.; Jahns, T.M.; Torres, R.A.; Liu, M.; Sarlioglu, B.; Chang, S. Development of High-Frequency WBG Power Modules with Reverse-Voltage-Blocking Capability for an Integrated Motor Drive using a Current-Source Inverter. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; pp. 1808–1815. [Google Scholar] [CrossRef]
- Jahns, T.M.; Sarlioglu, B. The Incredible Shrinking Motor Drive: Accelerating the Transition to Integrated Motor Drives. IEEE Power Electron. Mag. 2020, 7, 18–27. [Google Scholar] [CrossRef]
- Friedli, T.; Round, S.D.; Hassler, D.; Kolar, J.W. Design and Performance of a 200-kHz All-SiC JFET Current DC-Link Back-to-Back Converter. IEEE Trans. Ind. Appl. 2009, 45, 1868–1878. [Google Scholar] [CrossRef]
- Guacci, M.; Zhang, D.; Tatic, M.; Bortis, D.; Kolar, J.W.; Kinoshita, Y.; Ishida, H. Three-phase two-third-PWM buck-boost current source inverter system employing dual-gate monolithic bidirectional GaN e-FETs. CPSS Trans. Power Electron. Appl. 2019, 4, 339–354. [Google Scholar] [CrossRef]
- Zhang, B.; Wang, S. A Survey of EMI Research in Power Electronics Systems with Wide-Bandgap Semiconductor Devices. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 626–643. [Google Scholar] [CrossRef]
- Rodriguez, J.; Moran, L.; Pontt, J.; Osorio, R.; Kouro, S. Modeling and analysis of common-mode voltages generated in medium voltage PWM-CSI drives. IEEE Trans. Power Electron. 2003, 18, 873–879. [Google Scholar] [CrossRef]
- Zhu, N.; Xu, D.; Wu, B.; Zargari, N.R.; Kazerani, M.; Liu, F. Common-Mode Voltage Reduction Methods for Current-Source Converters in Medium-Voltage Drives. IEEE Trans. Power Electron. 2013, 28, 995–1006. [Google Scholar] [CrossRef]
- Wang, Z.; Xu, Y.; Liu, P.; Zhang, Y.; He, J. Zero-Voltage-Switching Current Source Inverter Fed PMSM Drives with Reduced EMI. IEEE Trans. Power Electron. 2021, 36, 761–771. [Google Scholar] [CrossRef]











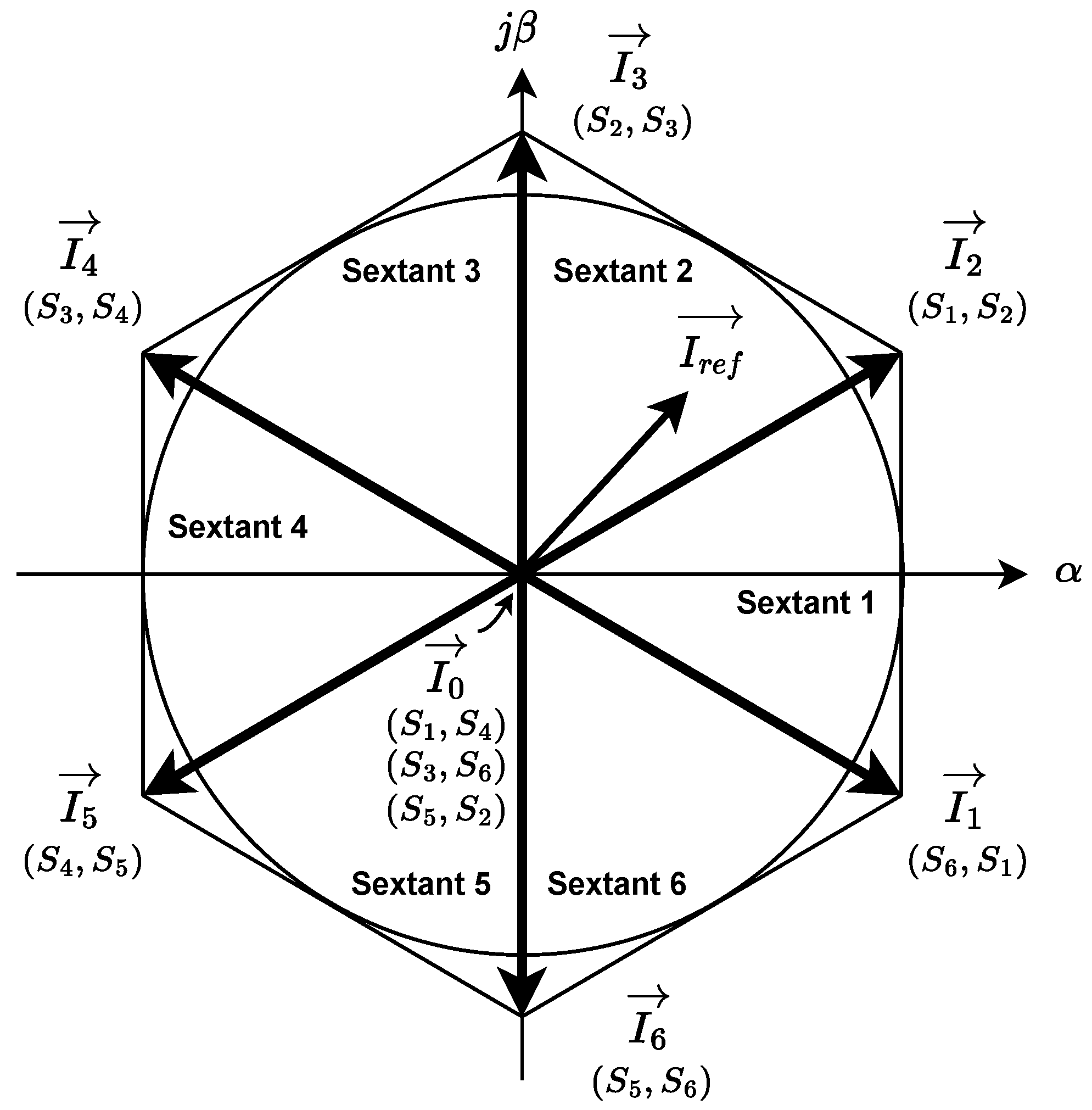
| State | Vector | ON Switch |
|---|---|---|
| Active | , | |
| , | ||
| , | ||
| , | ||
| , | ||
| , | ||
| Zero | , | |
| , | ||
| , |
| Efficiency | N. of Components | EMI | Fault-Tolerance | DC-Link Robustness | |
|---|---|---|---|---|---|
| VSI |  | |  | | |
| CSI | | | | | |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fidone, G.L.; Migliazza, G.; Carfagna, E.; Benatti, D.; Immovilli, F.; Buticchi, G.; Lorenzani, E. Common Architectures and Devices for Current Source Inverter in Motor-Drive Applications: A Comprehensive Review. Energies 2023, 16, 5645. https://doi.org/10.3390/en16155645
Fidone GL, Migliazza G, Carfagna E, Benatti D, Immovilli F, Buticchi G, Lorenzani E. Common Architectures and Devices for Current Source Inverter in Motor-Drive Applications: A Comprehensive Review. Energies. 2023; 16(15):5645. https://doi.org/10.3390/en16155645
Chicago/Turabian StyleFidone, Giovanni Luca, Giovanni Migliazza, Emilio Carfagna, Dario Benatti, Fabio Immovilli, Giampaolo Buticchi, and Emilio Lorenzani. 2023. "Common Architectures and Devices for Current Source Inverter in Motor-Drive Applications: A Comprehensive Review" Energies 16, no. 15: 5645. https://doi.org/10.3390/en16155645
APA StyleFidone, G. L., Migliazza, G., Carfagna, E., Benatti, D., Immovilli, F., Buticchi, G., & Lorenzani, E. (2023). Common Architectures and Devices for Current Source Inverter in Motor-Drive Applications: A Comprehensive Review. Energies, 16(15), 5645. https://doi.org/10.3390/en16155645