
Assessment of Energy Demand for PHEVs in Year-Round Operating Conditions

 , , ,
, , ,  ,
,  , ,
, ,  and
and 
Abstract
1. Introduction
2. Materials and Methods
2.1. Energy Demand for an Electric Drive Unit in a PHEV Hybrid Vehicle
- −
- driver (D)—determines the route, speed profile, dynamics and load on the drive unit
- −
- environment (E)—determines the movement resistance power, temperature and interference
- −
- vehicle (V)—determines the resistance power, mass, energy and interference
- −
- system (S)—determines the traffic flow, acceleration and travel time
2.2. Research Methodology
- −
- a driving analysis was carried out for the dominant mileage derived from the year-round mileage histogram (Figure 5). The value shown denotes a single trip with a distance of 50 km, with a standard deviation of 5 km,
- −
- the presented dominant mileage, having taken into account the standard deviation, denoted the range of approximate mileages analyzed in terms of the vehicle’s unitary energy consumption,
- −
- the presented dominant mileage is within the electric mode driving range, and the analysis only encompassed trips starting at 100% of the electric energy storage’s charge. The internal combustion engine only served an auxiliary function,
- −
- the vehicle’s technical data have shown that the electric motor should enable traveling the entire distance of 50 km during the road tests,
- −
- the unitary energy consumption was evaluated for constant driving speeds.
3. Results
3.1. Analysis of the Test Vehicle’s Distance and Energy Indices
- (a)
- at high driving speeds (highway—at speeds above 120 km/h),
- (b)
- during overtaking and dynamic acceleration (high-power sections),
- (c)
- when the electric energy storage was depleted.
3.2. Energy Consumption of an Electric Motor in a Hybrid Powertrain
3.3. The Vehicle’s Unitary Energy Consumption Index
4. Conclusions
- −
- the vehicle’s energy consumption is significantly affected by the time of year, which is related to ambient temperature and the road conditions; as can be seen in Figure 10, the differences in unitary energy consumption can be as high as 110%.
- −
- given the test methodology, i.e., the vehicle was driven by a single driver, the influence of the driver’s driving style on the results can be excluded,
- −
- it should be noted that the tests were mainly carried out on the same route at similar times of the day (commuting to and from work), and therefore, it should be concluded that the change in traffic intensity was random and did not, in this respect, have a significant impact on the vehicle’s energy intensity,
- −
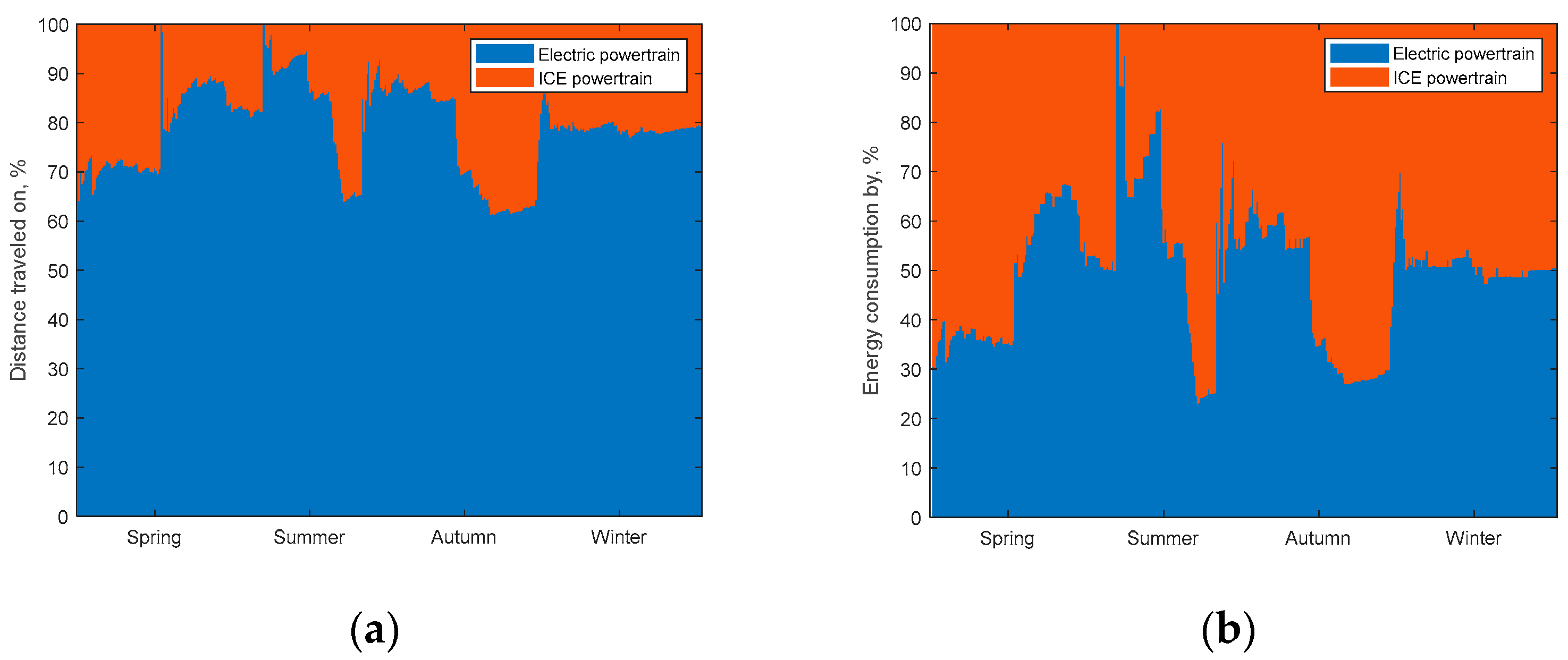
- despite the significant share of the electric motor (more than 70%) in the recorded trips, its relative energy consumption is relatively low compared with that of the ICE (Figure 7),
- −
- the PHEV vehicle type is mainly used by a driver with similar preferences, and energy consumption minimization is linked to the possibility of frequent battery charging. This is a problem that has already been recognized in many papers, as the electricity needs to be replenished after each trip (due to low capacity); otherwise, the vehicle’s powertrain uses the internal combustion engine, which significantly increases the unitary energy consumption.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Definitions/Abbreviations
| λ | output function ET → QTj, |
| energy consumption in the Driver–Environment–Vehicle Communication System (DEVS) model due to changes in ambient temp. (J), | |
| energy consumption in the DEVS model due to changes in vehicle speed (J), | |
| δint | internal function of energy transfer from storage to E→ET |
| δout | external parameter of energy transfer DEVS x X ET with DEVS input factor states, |
| a | mean acceleration of profile (m/s2), |
| AMR | Allied Market Research, |
| BEV | Battery Electric Vehicle, |
| BMS | Battery Management System, |
| C | test vehicle constant of 0.5664, |
| C2 | test vehicle constant of 0.1176, |
| DEVS | Driver–Environment–Vehicle Communication System, |
| E | energy (J), |
| ECU | Engine Control Unit, |
| EE | electricity, |
| EM | energy consumption in movement (J), |
| EMS | Energy Management System, |
| ER | rolling resistance energy (J), |
| ET | Energy Unit Vehicle state variables in the powertrain, |
| EURO6 | European Union emissions standard, |
| EV | Electric Vehicle, |
| FC | fuel consumption during test (g), |
| ICE | Internal Combustion Engine, |
| ICEV | Internal Combustion Engine Vehicle, |
| L | distance (m), |
| Le | distance driven by electric unit (m), |
| LT | total distance driven (m), |
| M | mass (kg), |
| NVH | environmental interference, |
| P | Power (W), |
| PHEV | Plug-in Hybrid Electric Vehicle, |
| Qe | distance-related electric energy consumption (kWh/100 km), |
| Qf | distance-related fuel consumption (dm3/100 km), |
| QL | mileage energy consumption, |
| QmL | mass-related energy consumption (J/kg), |
| QTj | total unit energy consumption (J/m·kg−1), |
| QTj, | total unit energy consumption (J/(kg m)), |
| QTje, | electric motor’s unit energy consumption (J/(kg m)), |
| QTjp, | combustion engine’s unitary energy consumption (J/(kg m)), |
| RBF NN | Radial Basis Function Neural Network, |
| SOC | battery’s state of charge, |
| SOH | battery’s state of health, |
| T | ambient temperature (°C), |
| t | time progression, |
| te | drive end time (s), |
| ts | drive start time (s), |
| tT | total drive time (min), |
| TTW | Tank-To-Wheels, |
| V | mean vehicle speed (m/s), |
| v | vehicle speed (m/s), |
| WLTP | Worldwide Harmonized Light-Duty Vehicles Test Procedure, |
| Wo | calorific value (MJ/kg), |
| X | input variables from the DEVS model, |
| ΔED | drive unit losses—engine-to-wheels (J), |
| ΔEE | engine energy losses (J), |
| ΔEL | losses in energy supplied to the drive unit without transmission to the driving wheels (J), |
| ΔER | energy recovery during car deceleration (J), |
| ω | drive unit rotation speed (RPM). |
References
- Varga, B.O.; Mariasiu, F. Indirect Environment-Related Effects of Electric Car Vehicles Use. Environ. Eng. Manag. J. 2018, 17, 1591–1597. [Google Scholar] [CrossRef]
- Szumska, E.M.; Jurecki, R.S. Parameters Influencing on Electric Vehicle Range. Energies 2021, 14, 821. [Google Scholar] [CrossRef]
- Varga, B.O.; Sagoian, A.; Mariasiu, F. Prediction of Electric Vehicle Range: A Comprehensive Review of Current Issues and Challenges. Energies 2019, 12, 946. [Google Scholar] [CrossRef]
- Mamala, J.; Jantos, J.; Brol, S.; Malewicz, K.; Bieniek, A. The System of Supercharging for the Spark Ignition Engine. Combust. Engines 2007, 14, 291–298. [Google Scholar]
- Graba, M.; Mamala, J.; Bieniek, A.; Sroka, Z. Impact of the Acceleration Intensity of a Passenger Car in a Road Test on Energy Consumption. Energy 2021, 226, 120429. [Google Scholar] [CrossRef]
- Bokare, P.S.; Maurya, A.K. Acceleration-Deceleration Behaviour of Various Vehicle Types. Transp. Res. Procedia 2017, 25, 4733–4749. [Google Scholar] [CrossRef]
- Eisele, W.L.; Turner, S.M.; Benz, R.J. Using Acceleration Characteristics in Air Quality and Energy Consumption Analyses; Texas Transportation Institute, The Texas A & M University System College Station, Southwest Region University Transportation Center Texas Transportation: Bryan, TX, USA, 1996; Volume 7. [Google Scholar]
- Carlson, R.B.; Lohse-Busch, H.; Duoba, M.; Shidore, N. Drive Cycle Fuel Consumption Variability of Plug-in Hybrid Electric Vehicles Due to Aggressive Driving; SAE Technical Papers; SAE International: Warrendale, PA, USA, 2009; pp. 1–8. [Google Scholar]
- Rask, E.; Santini, D.; Lohse-Busch, H. Analysis of Input Power, Energy Availability, and Efficiency during Deceleration for X-EV Vehicles. SAE Int. J. Altern. Powertrains 2013, 2, 350–361. [Google Scholar] [CrossRef]
- Hayes, J.G.; De Oliveira, R.P.R.; Vaughan, S.; Egan, M.G. Simplified Electric Vehicle Power Train Models and Range Estimation. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference, VPPC 2011, Chicago, IL, USA, 6–9 September 2011. [Google Scholar] [CrossRef]
- Belz, N.P.; Aultman-Hall, L. Analyzing the Effect of Driver Age on Operating Speed and Acceleration Noise. Transp. Res. Rec. 2011, 2265, 184–191. [Google Scholar] [CrossRef]
- Hu, K.; Wu, J.; Schwanen, T. Differences in Energy Consumption in Electric Vehicles: An Exploratory Real-World Study in Beijing. J. Adv. Transp. 2017, 2017, 4695975. [Google Scholar] [CrossRef]
- Sentoff, K.M.; Aultman-Hall, L.; Holmén, B.A. Implications of Driving Style and Road Grade for Accurate Vehicle Activity Data and Emissions Estimates. Transp. Res. Part D Transp. Environ. 2015, 35, 175–188. [Google Scholar] [CrossRef]
- Zhu, B.; Tao, X.; Zhao, J.; Ke, M.; Wang, H.; Deng, W. An Integrated GNSS/UWB/DR/VMM Positioning Strategy for Intelligent Vehicles. IEEE Trans. Veh. Technol. 2020, 69, 10842–10853. [Google Scholar] [CrossRef]
- Tao, X.; Zhu, B.; Xuan, S.; Zhao, J.; Jiang, H.; Du, J.; Deng, W. A Multi-Sensor Fusion Positioning Strategy for Intelligent Vehicles Using Global Pose Graph Optimization. IEEE Trans. Veh. Technol. 2022, 71, 2614–2627. [Google Scholar] [CrossRef]
- Zhu, B.; Tao, X.; Zhao, J.; Ke, M.; Wang, Z.; Li, X. Two-Stage UWB Positioning Algorithm of Intelligent Vehicle. J. Traffic Transp. Eng. 2021, 21, 256–266. [Google Scholar] [CrossRef]
- Li, X.; Tao, X.; Zhu, B.; Deng, W. Research on a Simulation Method of the Millimeter Wave Radar Virtual Test Environment for Intelligent Driving. Sensors 2020, 20, 1929. [Google Scholar] [CrossRef]
- Badin, F.; Le Berr, F.; Briki, H.; Dabadie, J.C.; Petit, M.; Magand, S.; Condemine, E. Evaluation of EVs Energy Consumption Influencing Factors: Driving Conditions, Auxiliaries Use, Driver’s Aggressiveness. World Electr. Veh. J. 2013, 6, 112–123. [Google Scholar] [CrossRef]
- Evtimov, I.; Ivanov, R.; Sapundjiev, M. Energy Consumption of Auxiliary Systems of Electric Cars. MATEC Web Conf. 2017, 133, 2–6. [Google Scholar] [CrossRef]
- Bi, J.; Wang, Y.; Shao, S.; Cheng, Y. Residual Range Estimation for Battery Electric Vehicle Based on Radial Basis Function Neural Network. Meas. J. Int. Meas. Confed. 2018, 128, 197–203. [Google Scholar] [CrossRef]
- Mamala, J.; Graba, M.; Bieniek, A.; Prażnowski, K.; Augustynowicz, A.; Śmieja, M. Study of Energy Consumption of a Hybrid Vehicle in Real-World Conditions. Eksploat. i Niezawodn. 2021, 23, 636–645. [Google Scholar] [CrossRef]
- Wang, K. Study on Low Temperature Performance of Li Ion Battery. OALib 2017, 4, 1–12. [Google Scholar] [CrossRef]
- Lv, S.; Wang, X.; Lu, W.; Zhang, J.; Ni, H. The Influence of Temperature on the Capacity of Lithium Ion Batteries with Different Anodes. Energies 2022, 15, 60. [Google Scholar] [CrossRef]
- Vaz, W.; Nandi, A.K.R.; Landers, R.G.; Koylu, U.O. Electric Vehicle Range Prediction for Constant Speed Trip Using Multi-Objective Optimization. J. Power Sources 2015, 275, 435–446. [Google Scholar] [CrossRef]
- Wang, J.; Besselink, I.; Nijmeijer, H. Electric Vehicle Energy Consumption Modelling and Prediction Based on Road Information. World Electr. Veh. J. 2015, 7, 447–458. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, X.; Ouyang, M. Energy Consumption of Electric Vehicles Based on Real-World Driving Patterns: A Case Study of Beijing. Appl. Energy 2015, 157, 710–719. [Google Scholar] [CrossRef]
- Cui, D.; Wang, Z.; Liu, P.; Wang, S.; Zhang, Z.; Dorrell, D.G.; Li, X. Battery Electric Vehicle Usage Pattern Analysis Driven by Massive Real-World Data. Energy 2022, 250, 123837. [Google Scholar] [CrossRef]
- Smart, J.; Powell, W.; Schey, S. Extended Range Electric Vehicle Driving and Charging Behavior Observed Early in the EV Project; SAE Technical Paper 2013-01–14; SAE International: Warrendale, PA, USA, 2013. [Google Scholar] [CrossRef]
- Eurostat Average Distance per Person per Day (Kilometres). Available online: https://ec.europa.eu/eurostat/statistics-explained/images/b/b8/Excel_Passenger_mobility_statistics.xlsx (accessed on 17 July 2023).
- Zeigler, B.P. Multifacetted Modelling and Discrete Event Simulation; Michigan University: Ann Arbor, MI, USA, 1984; p. 372. ISBN 978-02127784502. [Google Scholar]
- Yuan, X.; Zhang, C.; Hong, G.; Huang, X.; Li, L. Method for Evaluating the Real-World Driving Energy Consumptions of Electric Vehicles. Energy 2017, 141, 1955–1968. [Google Scholar] [CrossRef]
- Spalding, S. RACQ Congested Roads Report: The Effects on Fuel Consumption and Vehicle Emissions Prepared by RACQ Vehicle Technologies Department. RACQ 2008, 1–9. Available online: https://media.racq.com.au (accessed on 17 July 2023).
- Niechaj, T. Elektryczne Audi Q4 Sportback 50 E-Tron Quattro: 300 KM i Zasięg Ok. 450 Km w Mieście. (The Electric Audi Q4 Sportback 50 e-Tron Quattro: 300 Hp and a Range of Approx. 450 Km in the City). Available online: https://antyweb.pl/elektryczne-audi-q4-sportback-50-e-tron-quattro-300-km-i-zasieg-ok-450-km-w-miescie-test (accessed on 20 July 2023).
- Sharer, P.; Leydier, R.; Rousseau, A. Impact of Drive Cycle Aggressiveness and Speed on HEVs Fuel Consumption Sensitivity; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2007. [Google Scholar] [CrossRef]
- Niechaj, T. Electric BMW IX3—Real Range and Energy Consumption Test, Also on the Motorway. Available online: https://antyweb.pl/elektryczne-bmw-ix3-rzeczywisty-zasieg-i-test-zuzycia-energii-takze-na-autostradzie (accessed on 17 July 2023).
- Kropiwnicki, J. A Unified Approach to the Analysis of Electric Energy and Fuel Consumption of Cars in City Traffic. Energy 2019, 182, 1045–1057. [Google Scholar] [CrossRef]
- Franke, T.; Krems, J.F. Interacting with Limited Mobility Resources: Psychological Range Levels in Electric Vehicle Use. Transp. Res. Part A Policy Pract. 2013, 48, 109–122. [Google Scholar] [CrossRef]
- Graba, M.; Bieniek, A.; Prażnowski, K.; Hennek, K.; Mamala, J.; Burdzik, R.; Śmieja, M. Analysis of Energy Efficiency and Dynamics during Car Acceleration. Eksploat. i Niezawodn. Maint. Reliab. 2023, 25, 196–208. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test | Energy Consumption (kW/h) | Difference Relative to the WLTP Test (%) |
|---|---|---|
| WLTP | 175 | - |
| Urban traffic (average speed of 22 km/h) | 156 | −10.9 |
| Constant speed of 90 km/h | 184 | 5.1 |
| Constant speed of 120 km/h | 247 | 41.1 |
| Constant speed of 140 km/h | 308 | 76.0 |
| Test | Energy Consumption (kW/h) | Difference Relative to the WLTP Test (%) |
|---|---|---|
| WLTP | 209 | - |
| Urban traffic (average speed of 22 km/h) | 179 | −13.78 |
| Constant speed of 90 km/h | 217.5 | 4.6 |
| Constant speed of 120 km/h | 261.7 | 25.8 |
| Constant speed of 140 km/h | 350.3 | 68.2 |
| Manufacturer | Mercedes Benz |
|---|---|
| Model | A250e/V177 |
| Internal combustion engine displacement | 1332 cm3 |
| Internal combustion engine power | 118 kW at 5500 rpm |
| Internal combustion engine maximum torque | 210 Nm at 1750 rpm |
| Electric motor power | 75 kW |
| Long-lasting electric motor power | 55 kW |
| Electric motor maximum torque | 450 Nm |
| Drive units’ installation location | At the front, transversely |
| Internal combustion engine supercharging | Turbocharger |
| Powertrain type | PHEV |
| Transmission | Automatic—eight gears |
| Vehicle mass | 1817 kg |
| Emissions standard | Euro 6 (AP) |
| Gasoline range | 450 km |
| Battery range | 75 km |
| Average CO2 emissions according to WLTP | 23 g/km (1.0 dm3/100 km) |
| EV system’s energy consumption | 209 Wh/km |
| Battery capacity (electricity storage) | 15.6 kWh |
| Period/Season | LT, (km) | Le, (km) | tT (min) | V, (km/h) | Qf (dm3/100 km) | Qe (kWh/100 km) | QTjp, (J/(kg m)) | QTje, (J/(kg m)) | QTj, (J/(kg m)) | Temp., (°C) |
|---|---|---|---|---|---|---|---|---|---|---|
| Winter (I) | 48.7 | 46.9 | 54.2 | 55.0 | 2.78 | 14.7 | 1.77 | 0.41 | 0.81 | 3.9 |
| Spring (II) | 48.2 | 47.3 | 48.2 | 57.8 | 1.22 | 16.6 | 1.57 | 0.38 | 0.55 | 11.5 |
| Summer (III) | 49.7 | 49.0 | 47.4 | 59.5 | 0.74 | 12.1 | 1.25 | 0.27 | 0.38 | 24.0 |
| Autumn (IV) | 50.5 | 46.2 | 72.2 | 47.9 | 1.77 | 13.3 | 1.53 | 0.35 | 0.61 | 7.5 |
| Year | 49.7 | 46.4 | 49.1 | 48.3 | 1.56 | 12.8 | 1.51 | 0.35 | 0.75 | 11.42 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Graba, M.; Mamala, J.; Bieniek, A.; Augustynowicz, A.; Czernek, K.; Krupińska, A.; Włodarczak, S.; Ochowiak, M. Assessment of Energy Demand for PHEVs in Year-Round Operating Conditions. Energies 2023, 16, 5571. https://doi.org/10.3390/en16145571
Graba M, Mamala J, Bieniek A, Augustynowicz A, Czernek K, Krupińska A, Włodarczak S, Ochowiak M. Assessment of Energy Demand for PHEVs in Year-Round Operating Conditions. Energies. 2023; 16(14):5571. https://doi.org/10.3390/en16145571
Chicago/Turabian StyleGraba, Mariusz, Jarosław Mamala, Andrzej Bieniek, Andrzej Augustynowicz, Krystian Czernek, Andżelika Krupińska, Sylwia Włodarczak, and Marek Ochowiak. 2023. "Assessment of Energy Demand for PHEVs in Year-Round Operating Conditions" Energies 16, no. 14: 5571. https://doi.org/10.3390/en16145571
APA StyleGraba, M., Mamala, J., Bieniek, A., Augustynowicz, A., Czernek, K., Krupińska, A., Włodarczak, S., & Ochowiak, M. (2023). Assessment of Energy Demand for PHEVs in Year-Round Operating Conditions. Energies, 16(14), 5571. https://doi.org/10.3390/en16145571