
A Grey Wolf Optimization Algorithm-Based Optimal Reactive Power Dispatch with Wind-Integrated Power Systems


Abstract
1. Introduction
- This study applied the GWO algorithm to solve the optimal placement of renewable energy in power systems with the objective of minimizing active power losses and voltage deviations.
- The proposed GWO method was compared with other heuristic optimization algorithms, including PSO, GA, ABC, OGSA, HBMO, and HFA, based on several performance metrics.
- This study demonstrated the superior performance of the proposed GWO method in terms of converging to better optimal solutions for control variables when compared to the other heuristic methods.
- The effectiveness of the proposed GWO method was evaluated for identifying the optimal placement of wind energy in power systems, resulting in reduced power losses and improved bus voltage profiles without requiring additional measures.
- This research compared the results obtained with and without wind integration, highlighting the superior performance of the GWO method in minimizing active power losses and voltage deviations in power systems with wind integration.
2. ORPD Problem Formulation
2.1. Objective Function (F1)
2.2. Objective Function (F2)
- (a)
- Voltage Magnitude Constraints:
- (b)
- Active Power Generation Constraints:
- (c)
- Reactive Power Generation Constraints:
- (d)
- Reactive Power Source Capacity Constraints:
- (e)
- Transformer Tap Position Constraints:
3. Grey Wolf Optimization (GWO) Algorithm
Mathematical Modeling of GWO Algorithm
4. Implementation of GWO Algorithm for Solving the ORPD Problem with Wind Placement
| Algorithm 1: Grey Wolf Optimization Pseudocode of Optimum Reactive Power Dispatch with Wind Power Placement |
| Input: Reactive power limits, voltage limits, power balance constraints, wind data, GWO population size, number of iterations, minimum improvement threshold Output: ORPD solution with wind integration, total power loss, voltage deviations 1: DEFINE optimization problem (ORPD and wind placement) 2: INITIALIZE the population of grey wolves randomly 3: EVALUATE fitness of each grey wolf 4: DETERMINE the alpha, beta, and delta wolves 5: SET iteration count = 0 6: SET improvement count = 0 7: WHILE stop criteria is not met: a. FOR EACH grey wolf i, update its position: - Compute A and D as described above - Update position using x_i(t+1) = x_i(t) + A * D b. Apply constraints to ensure feasibility (ORPD and wind placement) c. Evaluate fitness of each grey wolf d. Update alpha, beta, and delta wolves if necessary e. Increment iteration count f. IF fitness of alpha wolf has improved, SET improvement count = 0 ELSE increment improvement count g. IF iteration count exceeds maximum allowed iterations OR improvement count exceeds minimum allowed improvements RETURN 8: END 9: RETURN the solution I: Stopping Criterion: Maximum number of iterations reached Minimum improvement threshold reached (i.e., fitness has not improved by a certain amount in the last k iterations) II: Position Update Equation: x_i(t+1) = x_i(t) + A * D, where A and D are defined as follows: A = 2 * a * r–a, D = abs(C * X_alpha–x_i(t))–abs(C * X_beta–x_i(t)) III: Constraints: Reactive power and voltage limits Power balance and wind power output constraints IV: Fitness Function: Combined objective function that includes both ORPD and wind placement to minimize losses and voltage deviations V: Update Procedure of 𝛼, 𝛽, and 𝛿 wolves: IF fitness of a wolf is BETTER THAN 𝛼 SET it AS 𝛼 ELSE IF fitness of wolf is BETTER THAN 𝛽 SET it AS 𝛽 ELSE IF fitness of wolf is BETTER THAN 𝛿 SET it AS 𝛿 |
5. Simulation Results and Discussion
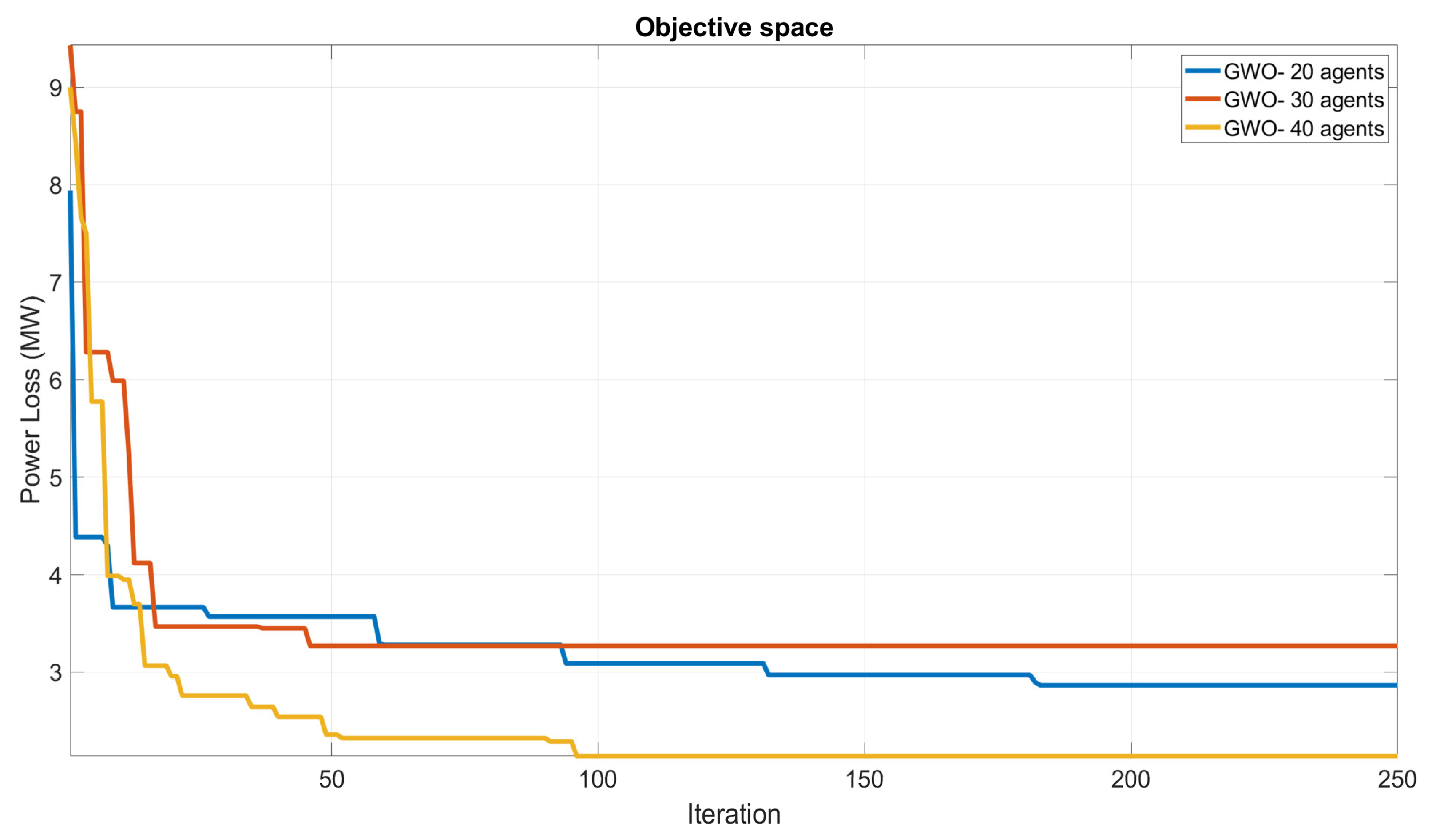
5.1. IEEE 30-Bus System
5.1.1. Scenario 1: Results of the IEEE 30-Bus System with 19 Control Variables
- 6 variables of generator bus voltages.
- 4 variables of transformer tap settings.
- 9 variables of reactive power of the VAR compensators.
5.1.2. Scenario 2: Results of the IEEE 30-Bus System with 25 Control Variables
- 6 variables of generated power.
- 6 variables of generator bus voltages.
- 4 variables of transformer tap settings.
- 9 variables of reactive power of the VAR compensators.
5.1.3. Scenario 3: Results of the IEEE 30-Bus System with 27 Control Variables (Wind Integration)
- 7 variables of generated power with wind power.
- 7 variables of generator bus voltages with wind bus.
- 4 variables of transformer tap settings.
- 9 variables of reactive power of the VAR compensators.
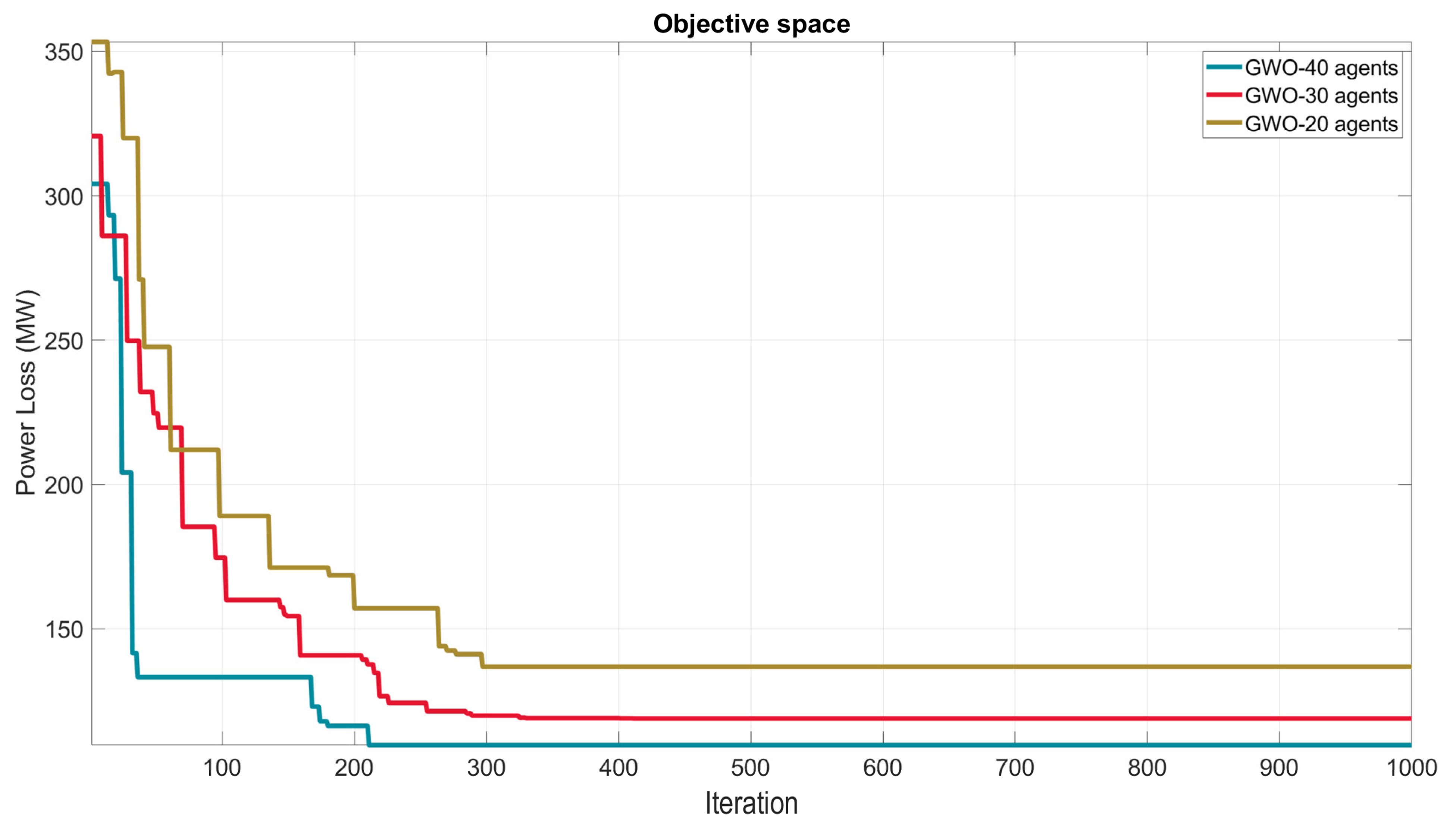
5.2. IEEE 118-Bus System
5.2.1. Scenario 1: Results of the IEEE 118-Bus System with 77 Control Variables
- 54 variables of generator bus voltages.
- 9 variables of transformer tap settings.
- 14 variables of reactive power of the VAR compensators.
5.2.2. Scenario 2: Results of the IEEE 118-Bus System with 131 Control Variables
- 54 variables of generated power.
- 54 variables of generator bus voltages.
- 9 variables of transformer tap settings.
- 14 variables of reactive power of the VAR compensators.
5.2.3. Scenario 3: Results of the IEEE 118-Bus System with 133 Control Variables (Wind Integration)
- 55 variables of generated power with wind power.
- 55 variables of generator bus voltages with wind bus.
- 9 variables of transformer tap settings.
- 14 variables of reactive power of the VAR compensators.
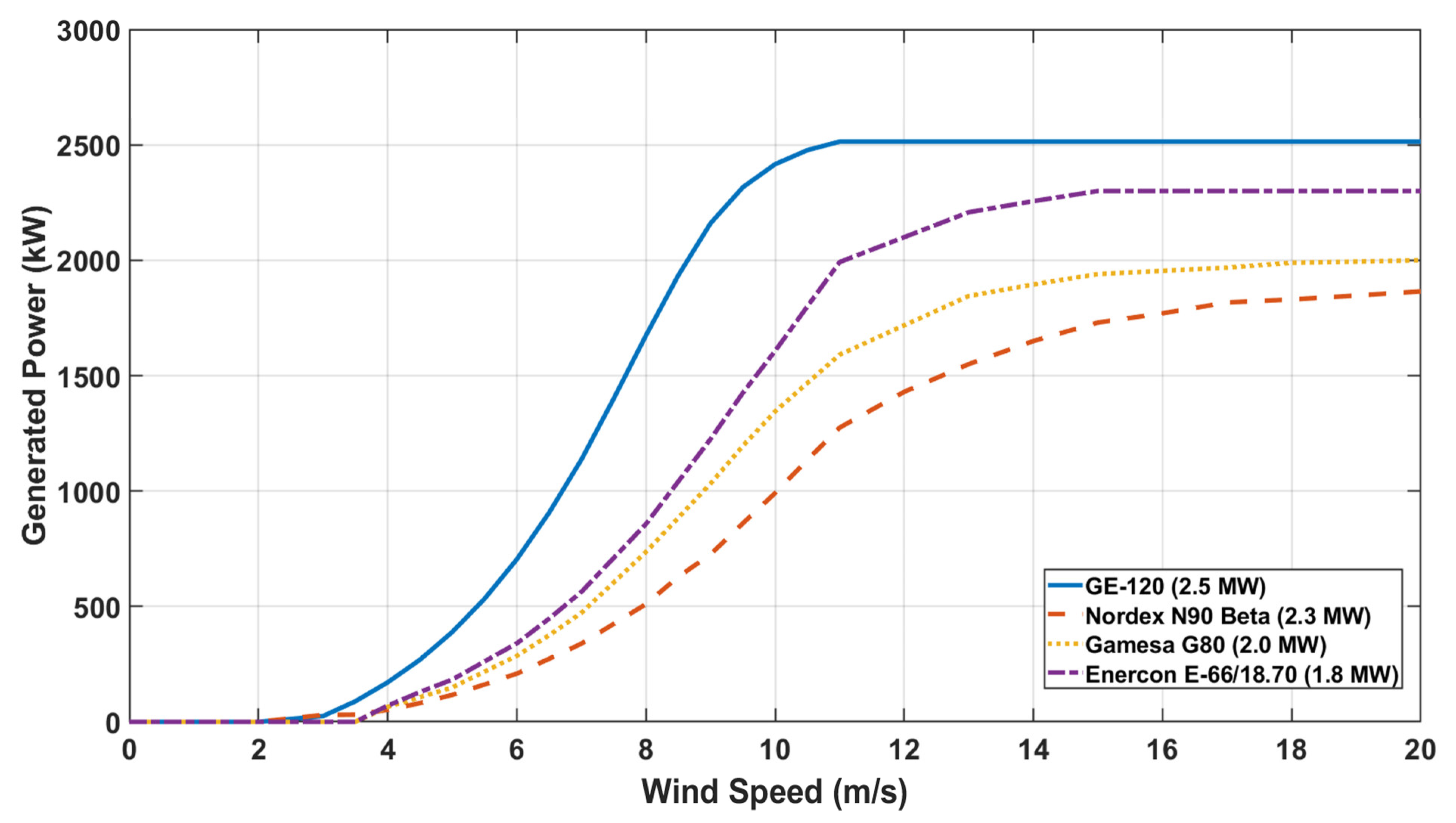
5.2.4. Site-Specific Wind Placement Sizing with Weibull Distribution Parameters
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ORPD | Optimal reactive power dispatch |
| GWO | Grey wolf optimization |
| IEEE | Institute of Electrical and Electronics Engineers |
| PSO | Particle swarm optimization |
| GA | Genetic algorithm |
| ABC | Artificial bee colony |
| OGSA | Opposition-based gravitational search algorithm |
| HBMO | Honey bee mating optimization |
| HFA | Hybrid firefly algorithm |
| GSA | Gravitational search algorithm |
| CFA | Coulomb’s and Franklin’s laws algorithm |
| MOGA | Multi-objective genetic algorithm |
| MOPSO | Multi-objective particle swarm optimization |
| SVM | Support vector machine |
| ANN | Artificial neural network |
| LP | Linear programming |
| QP | Quadratic programming |
| NLP | Nonlinear programming |
| PL | Real power loss |
| Nb | Number of buses |
| Pi | Real power injection at bus i |
| Pgi | Real power output of generator which connects to bus i |
| Pdi | Real power load which connects to bus i |
| VD | Voltage deviations |
| NPQ | Number of PQ buses |
| Reference value of voltage magnitude for bus i | |
| Voltage magnitude of the ith load bus | |
| Kf, | Penalty factor for line flow violation |
| Kv | Penalty factor for limit violation |
| Kq | Penalty factor for bus voltage and generator reactive power |
| Qgi | Reactive power output of the generator connecting to bus i |
| Loading of transmission line | |
| Ng | Number of generator units |
| Nl | Number of transmission lines |
| PGK | Generated active power |
| PDK | Demand of active power |
| Gkj | Conductance between k and j |
| Bkj | Susceptance between k and j |
| QGK | Reactive power generated |
| QDK | Reactive power demand |
| N | Total number of buses |
| Vi-min | Voltage magnitude lower limit |
| Vi-max | Voltage magnitude upper limit |
| Pgi-max | Maximum active power of ith generator |
| Pgi-min | Minimum active power of ith generator |
| Vi-max | Voltage magnitude upper limit |
| Qgi | ith generator reactive power |
| Qgi-max | Maximum reactive power of ith generator |
| Qgi-min | Minimum reactive power of ith generator |
| Nc | Number of shunt VAR compensation devices |
| qci-min | Minimum limits of shunt VAR compensation |
| qci-max | Maximum limits of shunt VAR compensation |
| Ti | Transformer tap ratio |
| Nt | Number of tap setting transformers |
| Ti-min | Minimum limit of transformer tap ratio |
| Ti-max | Maximum limit of transformer tap ratio |
| alpha (α) wolves | Leaders of the wolf pack |
| beta (β) wolves | Second most important wolves in the group |
| delta (δ) wolves | Third most important wolves in the group |
| omega (ω) wolves | Fourth most important wolves in the group |
| Xp | Position vector of the grey wolf |
| X | Position of the prey in the search space |
| r1 | Randomly generated number between 0 to 1 |
| r2 | Randomly generated number between 0 to 1 |
| k | Shape coefficient |
| c | Scale coefficient |
| GE | General Electric |
References
- Zimmerman, R.D.; Murillo-Sánchez, C.E.; Thomas, R.J. MATPOWER: Steady-State Operations, Planning and Analysis Tools for Power Systems Research and Education. IEEE Trans. Power Syst. 2011, 26, 12–19. [Google Scholar] [CrossRef]
- Zhu, J. Optimization of Power System Operation; John Wiley Sons: Hoboken, NJ, USA, 2015. [Google Scholar] [CrossRef]
- Maskar, M.B.; Thorat, A.R.; Korachgaon, I. A review on optimal power flow problem and solution methodologies. In Proceedings of the International Conference on Data Management, Analytics and Innovation (ICDMAI), Pune, India, 24–26 February 2017; pp. 64–70. [Google Scholar] [CrossRef]
- Ting, C.-K. On the Mean Convergence Time of Multi-Parent Genetic Algorithms without Selection. In Advances in Artificial Life: 8th European Conference, ECAL 2005, Canterbury, UK, 5–9 September 2005; Springer: Berlin/Heidelberg, Germany, 2005; pp. 403–412. Available online: https://link.springer.com/chapter/10.1007/11553090_41 (accessed on 10 May 2023).
- Van Cutsem, T.; Vournas, C. Voltage Stability of Electric Power Systems; Springer: New York, NY, USA, 1998; Available online: https://link.springer.com/book/10.1007/978-0-387-75536-6 (accessed on 10 May 2023).
- Glavic, M.; Van Cutsem, T. Some Reflections on Model Predictive Control of Transmission Voltages. In Proceedings of the 38th North American Power Symposium (38th NAPS), Carbondale, IL, USA, 17–19 September 2006. [Google Scholar] [CrossRef]
- Carpentier, J. Contribution a l’etude du dispatching economique. Bull. Société Fr. Des Électriciens 1962, 8, 431–447. [Google Scholar]
- Carpentier, J. Optimal power flows. Int. J. Electr. Power Energy Syst. 1979, 1, 3–15. [Google Scholar] [CrossRef]
- Kou, X. Particle Swarm Optimization Based Reactive Power Dispatch for Power Networks with Distributed Generation. Master’s Thesis, University of Denver, Denver, CO, USA, 2015. Available online: https://digitalcommons.du.edu/etd/1035 (accessed on 10 May 2023).
- Norshahrani, M.; Mokhlis, H.; Abu Bakar, A.; Jamian, J.; Sukumar, S. Progress on Protection Strategies to Mitigate the Impact of Renewable Distributed Generation on Distribution Systems. Energies 2017, 11, 1864. [Google Scholar] [CrossRef]
- Al Rashidi, M.R.; El-Hawary, M.E. A Survey of Particle Swarm Optimization Applications in Electric Power Systems. IEEE Trans. Evol. Comput. 2009, 13, 913–918. [Google Scholar] [CrossRef]
- Salama, M.M.A.; Manojlovic, N.; Quintana, V.H.; Chikhani, A.Y. Real-Time Optimal Reactive Power Control for Distribution Networks. Electr. Power Energy Syst. 1996, 18, 185–193. [Google Scholar] [CrossRef]
- Shaw, B.; Mukherjee, V.; Ghoshal, S.P. Solution of reactive power dispatch of power systems by an opposition-based gravitational search algorithm. Int. J. Electr. Power Energy Syst. 2014, 55, 29–40. [Google Scholar] [CrossRef]
- Ghasemi, A.; Valipour, K.; Tohidi, A. Multi objective optimal reactive power dispatch using a new multi objective strategy. Electr. Power Energy Syst. 2014, 57, 318–334. [Google Scholar] [CrossRef]
- Rajan, A.; Malakar, T. Optimal reactive power dispatch using hybrid Nelder–Mead simplex based firefly algorithm. Int. J. Electr. Power Energy Syst. 2015, 66, 9–24. [Google Scholar] [CrossRef]
- Ghasemi, M.; Akbari, E.; Faraji Davoudkhani, I.; Rahimnejad, A.; Asadpoor, M.B.; Gadsden, S.A. Application of Coulomb’s and Franklin’s laws algorithm to solve large-scale optimal reactive power dispatch problems. Soft Comput. 2022, 26, 13899–13923. [Google Scholar] [CrossRef]
- Dutta, S.; Roy, P.K.; Manna, D.K. HBBO Optimization for Optimal Reactive Power Dispatch Incorporating TCSC and TCPS Devices. In Proceedings of the Michael Faraday IET International Summit, Kolkata, India, 12–13 September 2015; pp. 156–163. [Google Scholar] [CrossRef]
- Cao, Y.J.; Wu, Q.H. Optimal Reactive Power Dispatch Using an Adaptive Genetic Algorithm. In Proceedings of the Second International Conference on Genetic Algorithms in Engineering Systems, Glasgow, UK, 2–4 September 1997; pp. 117–122. [Google Scholar] [CrossRef]
- El-Ela, A.A.; Kinawy, A.M.; El-Sehiemy, R.A.; Mouwafi, M.T. Optimal reactive power dispatch using ant colony optimization algorithm. Electr. Eng. 2011, 93, 103–116. [Google Scholar] [CrossRef]
- Khanmiri, D.T.; Nasiri, N.; Abedinzadeh, T. Optimal Reactive Power Dispatch Using an Improved Genetic Algorithm. Int. J. Comput. Electr. Eng. 2012, 4, 463–472. [Google Scholar] [CrossRef]
- Esmin, A.A.; Lambert-Torres, G.; De Souza, A.Z. A hybrid particle swarm optimization applied to loss power minimization. IEEE Trans. Power Syst. 2005, 20, 859–866. [Google Scholar] [CrossRef]
- Sharif, S.S.; Taylor, J.H. Dynamic optimal reactive power flow. In Proceedings of the American Control Conference, Philadelphia, PA, USA, 26 June 1998; Volume 6, pp. 3410–3414. [Google Scholar] [CrossRef]
- Turkay, B.E.; Cabadag, R.I. Optimal Power Flow Solution Using Particle Swarm Optimization Algorithm. In Proceedings of the EUROCON, Zagreb, Croatia, 1–4 July 2013; pp. 1418–1424. [Google Scholar] [CrossRef]
- Om, H.; Shukla, S. Optimal Power Flow Analysis of IEEE-30 Bus System Using Soft Computing Techniques. Int. J. Eng. Res. Sci. (IJOER) 2015, 1, 55–60. [Google Scholar]
- Ayan, K.; Kılıç, U. Artificial Bee Colony Algorithm Solution for Optimal Reactive Power Flow. Appl. Soft Comput. 2012, 12, 1477–1482. [Google Scholar] [CrossRef]
- El-Shimy, M.; Abuel-wafa, A.R. Implementation and Analysis of Genetic Algorithms (GA) to the Optimal Power Flow (OPF) Problem. Sci. Bull. Fac. Eng. Ain Shams Univ. 2006, 41, 753–771. [Google Scholar] [CrossRef]
- Devaraj, D. Improved genetic algorithm for multi-objective reactive power dispatch problem. Eur. Trans. Electr. Power 2007, 17, 569–581. [Google Scholar] [CrossRef]
- Mamandur, K.R.C.; Chenoweth, R.D. Optimal Control of Reactive Power Flow for Improvements in Voltage Profiles and for Real Power Loss Minimization. IEEE Trans. Power Appar. Syst. 1981, 7, 3185–3194. [Google Scholar] [CrossRef]
- Kumar, C.; Raju, C.P. Constrained Optimal Power Flow Using Particle Swarm Optimization. Int. J. Emerg. Technol. Adv. Eng. 2012, 2, 235–241. [Google Scholar] [CrossRef]
- Dai, C.; Chen, W.; Zhu, Y.; Zhang, X. Seeker Optimization Algorithm for Optimal Reactive Power Dispatch. IEEE Trans. Power Syst. 2009, 24, 1218–1231. [Google Scholar] [CrossRef]
- Le Dinh, L.; Vo Ngoc, D.; Vasant, P. Artificial Bee Colony Algorithm for Solving Optimal Power Flow Problem. Sci. World J. 2013, 2013, 159040. [Google Scholar] [CrossRef]
- Mouassa, S.; Bouktir, T. Artificial Bee Colony Algorithm for Discrete Optimal Reactive Power Dispatch. In Proceedings of the International Conference in Industrial Engineering and Systems Management, Seville, Spain, 21–23 October 2015; pp. 654–662. [Google Scholar] [CrossRef]
- Ettappan, M.; Vimala, V.; Ramesh, S.; Kesavan, V.T. Optimal reactive power dispatch for real power loss minimization and voltage stability enhancement using Artificial Bee Colony Algorithm. Microprocess. Microsyst. 2020, 76, 103085. [Google Scholar] [CrossRef]
- Monti, A.; Ponci, F. Electric Power Systems. In Intelligent Monitoring, Control, and Security of Critical Infrastructure Systems; Springer: Berlin/Heidelberg, Germany, 2015; pp. 31–65. [Google Scholar] [CrossRef]
- Zhang, X.P. Electric Power System Analysis, Operation and Control. Electr. Eng. 2006, 3, 1–42. [Google Scholar] [CrossRef]
- Gautam, L.K.; Mishra, M.; Bisht, T. A Methodology for Power Flow & Voltage Stability Analysis. Int. Res. J. Eng. Technol. 2015, 2, 321–326. [Google Scholar]
- Ling, S.H.; Iu, H.H.; Chan, K.Y.; Lam, H.K.; Yeung, B.C.; Leung, F.H. Hybrid particle swarm optimization with wavelet mutation and its industrial applications. IEEE Trans. Syst. Man Cybern. Part B 2008, 38, 743–763. [Google Scholar] [CrossRef]
- Liu, Y.; Ćetenović, D.; Li, H.; Gryazina, E.; Terzija, V. Multi-objective optimization approaches have also been used in ORPD studies. Int. J. Electr. Power Energy Syst. 2022, 136, 107764. [Google Scholar] [CrossRef]
- Mouassa, S.; Bouktir, T. Multi-objective ant lion optimization algorithm to solve large-scale multi-objective optimal reactive power dispatch problem. COMPEL-Int. J. Comput. Math. Electr. Electron. Eng. 2019, 38, 304–324. [Google Scholar] [CrossRef]
- Beyer, H.-G. The Theory of Evolution Strategies; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1995. [Google Scholar] [CrossRef]
- Hansen, N.; Ostermeier, A. Completely derandomized self-adaptation in evolution strategies. Evol. Comput. 2001, 9, 159–195. [Google Scholar] [CrossRef]
- Sulaiman, M.H.; Mustafa, M.W.; Aliman, O.; Khalid, S.A.; Shareef, H. Real and reactive power flow allocation in deregulated power system utilizing genetic-support vector machine technique. Int. Rev. Electr. Eng. 2010, 5, 2199–2208. [Google Scholar]
- Mustafa, M.W.; Sulaiman, M.H.; Shareef, H.; Khalid, S.A. Reactive power tracing in pool-based power system utilising the hybrid genetic algorithm and least squares support vector machine. IET Gener. Transm. Distrib. 2012, 6, 133–141. [Google Scholar] [CrossRef]
- Jarmouni, E.; Mouhsen, A.; Lamhammedi, M.; Ouldzira, H. Integration of artificial neural networks for multi-source energy management in a smart grid. Int. J. Power Electron. Drive Syst. 2021, 12, 1919. [Google Scholar] [CrossRef]
- Lateef, A.A.A.; Ali Al-Janabi, S.I.; Abdulteef, O.A. Artificial Intelligence Techniques Applied on Renewable Energy Systems: A Review. In Proceedings of International Conference on Computing and Communication Networks: ICCCN; Springer: Singapore, 2021; pp. 297–308. [Google Scholar] [CrossRef]
- DingPing, L.; GuoLiang, S.; WenDong, G.; ZHi, Z.; BaoNing, H.; Wei, G. Power system reactive power optimization based on MIPSO. Energy Procedia 2012, 14, 788–793. [Google Scholar] [CrossRef]
- Yang, T.; Zhao, L.; Li, W.; Zomaya, A.Y. Reinforcement learning in sustainable energy and electric systems: A Survey. Annu. Rev. Control. 2020, 49, 145–163. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Abbas, M.; Alshehri, M.A.; Barnawi, A.B. Potential Contribution of the Grey Wolf Optimization Algorithm in Reducing Active Power Losses in Electrical Power Systems. Appl. Sci. 2022, 12, 6177. [Google Scholar] [CrossRef]
- Mohseni-Bonab, S.M.; Rabiee, A.; Mohammadi-Ivatloo, B.; Jalilzadeh, S.; Nojavan, S. A two-point estimate method for uncertainty modeling in multi-objective optimal reactive power dispatch problem. Int. J. Electr. Power Energy Syst. 2016, 75, 194–204. [Google Scholar] [CrossRef]
- Shaheen, M.A.; Yousri, D.; Fathy, A.; Hasanien, H.M.; Alkuhayli, A.; Muyeen, S.M. A novel application of improved marine predators algorithm and particle swarm optimization for solving the ORPD problem. Energies 2020, 13, 5679. [Google Scholar] [CrossRef]
- Electric Power Group. “Transmission System Planning Reference Book”, 118-Bus Test System. 2004. Available online: https://www.electricitypolicy.org.uk/pdfs/wp8.pdf. (accessed on 21 April 2023).
- Sulaiman, M.H.; Mustaffa, Z.; Mohamed, M.R.; Aliman, O. Using the gray wolf optimizer for solving optimal reactive power dispatch problem. Appl. Soft Comput. 2015, 32, 286–292. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Lower Limit | Upper Limit |
|---|---|---|
| Voltages | 0.90 p.u. | 1.10 p.u. |
| Tap Settings | 0.95 p.u. | 1.05 p.u. |
| Compensation Devices | 0 MVAR | 7 MVAR |
| Control Variables | PSO | GA | ABC | OGSA | HBMO | HFA | GWO (Proposed) |
|---|---|---|---|---|---|---|---|
| V1 | 1.1000 | 1.0228 | 1.1000 | 1.0500 | 1.0345 | 1.1 | 1.1000 |
| V2 | 1.1000 | 1.0181 | 1.0615 | 1.0410 | 1.0795 | 1.0543 | 1.0940 |
| V5 | 1.085 | 0.9859 | 1.0711 | 1.0154 | 1.0654 | 1.0751 | 1.0760 |
| V8 | 1.0838 | 0.9858 | 1.0849 | 1.0267 | 1.0736 | 1.0868 | 1.0837 |
| V11 | 1.1000 | 0.9859 | 1.1000 | 1.0082 | 0.9324 | 1.1 | 1.0847 |
| V13 | 1.1000 | 0.9815 | 1.0665 | 1.0500 | 0.9538 | 1.1 | 1.0894 |
| T11 | 1.1000 | 0.9996 | 0.9700 | 1.0585 | 1.0902 | 0.9800 | 1.0385 |
| T12 | 0.9000 | 0.9715 | 1.0500 | 0.9089 | 0.9546 | 0.9500 | 0.9753 |
| T15 | 1.0200 | 0.9794 | 0.9900 | 1.0141 | 1.0901 | 0.9701 | 1.0346 |
| T36 | 0.9900 | 0.9477 | 0.9900 | 1.0182 | 1.0637 | 0.9700 | 1.0016 |
| QC10 | 1.1000 | 2.0124 | 5.0000 | 0.0330 | 1.6254 | 4.7003 | 1.3636 |
| QC12 | 0.4000 | 6.1953 | 5.0000 | 0.0249 | 4.3928 | 4.7061 | 0.6031 |
| QC15 | 0.7000 | 3.4021 | 5.0000 | 0.0177 | 0.1302 | 4.7006 | 2.5714 |
| QC17 | 5.0000 | 1.6718 | 5.0000 | 0.0500 | 2.0635 | 2.3059 | 2.2171 |
| QC20 | 4.7000 | 2.4060 | 4.1000 | 0.0334 | 0.3502 | 4.8035 | 1.3145 |
| QC21 | 1.0000 | 4.0786 | 3.3000 | 0.0403 | 0.2736 | 4.9025 | 4.4976 |
| QC23 | 3.0000 | 2.9779 | 0.9000 | 0.0269 | 0.0000 | 4.8040 | 1.7628 |
| QC24 | 0.8000 | 1.0617 | 5.0000 | 0.0500 | 1.3029 | 4.8052 | 4.4368 |
| QC29 | 1.2000 | 3.1220 | 2.4000 | 0.0194 | 0.0003 | 3.3983 | 1.3185 |
| Tot. Loss (MW) | 4.66091 | 5.0977 | 4.6022 | 4.4984 | 4.4086 | 4.529 | 4.1781 |
| V. D. (pu) | 1.4600 | 0.4773 | 0.7378 | 0.8085 | 0.8736 | 1.625 | 0.4697 |
| Variables | Lower Limit | Upper Limit |
|---|---|---|
| Generated Power | 0.05 p.u. | 2.00 p.u. |
| Voltages | 1.00 p.u. | 1.10 p.u. |
| Tap Settings | 0.90 p.u. | 1.10 p.u. |
| Compensation Devices | 0 MVAR | 5 MVAR |
| Control Variables | Limits | ABC | GWO (Proposed) | |
|---|---|---|---|---|
| Lower | Upper | |||
| P1 | 0.50 | 2.00 | 0.5462 | 0.2351 |
| P2 | 0.20 | 0.80 | 0.7863 | 0.4848 |
| P5 | 0.15 | 0.50 | 0.4903 | 0.4700 |
| P8 | 0.10 | 0.50 | 0.3477 | 0.4688 |
| P11 | 0.10 | 0.50 | 0.2999 | 0.4693 |
| P13 | 0.12 | 0.50 | 0.3945 | 0.4617 |
| V1 | 1.00 | 1.10 | 1.0927 | 1.1000 |
| V2 | 1.00 | 1.10 | 1.0880 | 1.0984 |
| V5 | 1.00 | 1.10 | 1.0695 | 1.0805 |
| V8 | 1.00 | 1.10 | 1.0722 | 1.0982 |
| V11 | 1.00 | 1.10 | 1.0860 | 1.0969 |
| V13 | 1.00 | 1.10 | 1.0926 | 1.1000 |
| T11 | 0.90 | 1.10 | 0.9983 | 1.0220 |
| T12 | 0.90 | 1.10 | 0.9994 | 0.9571 |
| T15 | 0.90 | 1.10 | 0.9984 | 1.0386 |
| T36 | 0.90 | 1.10 | 1.0034 | 1.0093 |
| QC10 | 0.00 | 5.00 | 1.5500 | 2.5770 |
| QC12 | 0.00 | 5.00 | 3.9400 | 2.5370 |
| QC15 | 0.00 | 5.00 | 3.4700 | 1.0370 |
| QC17 | 0.00 | 5.00 | 3.3310 | 1.8280 |
| QC20 | 0.00 | 5.00 | 3.3320 | 3.0675 |
| QC21 | 0.00 | 5.00 | 3.9500 | 1.6370 |
| QC23 | 0.00 | 5.00 | 1.3000 | 1.7702 |
| QC24 | 0.00 | 5.00 | 3.7100 | 3.3960 |
| QC29 | 0.00 | 5.00 | 3.9900 | 0.8000 |
| Total Loss (MW) | 3.0410 | 2.0679 | ||
| Voltage Deviation (pu) | 1.0353 | 0.9769 | ||
| Variables | Lower Limit | Upper Limit |
|---|---|---|
| Wind Power | 0.00 p.u. | 0.10 p.u. |
| Generated Power | 0.05 p.u. | 2.00 p.u. |
| Voltages | 1.00 p.u. | 1.10 p.u. |
| Tap Settings | 0.90 p.u. | 1.10 p.u. |
| Compensation Devices | 0 MVAR | 5 MVAR |
| Control Variables | Limits | GWO (Proposed) | |
|---|---|---|---|
| Lower | Upper | ||
| Pwind | 0.00 | 0.10 | 0.0982 |
| P1 | 0.50 | 1.00 | 0.2351 |
| P2 | 0.20 | 0.80 | 0.4848 |
| P5 | 0.15 | 0.50 | 0.4700 |
| P8 | 0.10 | 0.50 | 0.4688 |
| P11 | 0.10 | 0.50 | 0.4693 |
| P13 | 0.12 | 0.50 | 0.4617 |
| Vwind | 1.00 | 1.10 | 1.0604 |
| V1 | 1.00 | 1.10 | 1.0531 |
| V2 | 1.00 | 1.10 | 1.0436 |
| V5 | 1.00 | 1.10 | 1.0500 |
| V8 | 1.00 | 1.10 | 1.0977 |
| V11 | 1.00 | 1.10 | 1.0473 |
| V13 | 1.00 | 1.10 | 0.9781 |
| T11 | 0.90 | 1.10 | 0.9500 |
| T12 | 0.90 | 1.10 | 1.0500 |
| T15 | 0.90 | 1.10 | 1.0343 |
| T36 | 0.90 | 1.10 | 0.9884 |
| QC10 | 0.00 | 5.00 | 4.9322 |
| QC12 | 0.00 | 5.00 | 4.3456 |
| QC15 | 0.00 | 5.00 | 0.7096 |
| QC17 | 0.00 | 5.00 | 2.2971 |
| QC20 | 0.00 | 5.00 | 1.6113 |
| QC21 | 0.00 | 5.00 | 3.0152 |
| QC23 | 0.00 | 5.00 | 0.3921 |
| QC24 | 0.00 | 5.00 | 2.2213 |
| QC29 | 0.00 | 5.00 | 0.4657 |
| Total Loss (MW) | 1.8010 | ||
| Voltage Deviation (pu) | 1.0154 | ||
| Variables | Lower Limit | Upper Limit |
|---|---|---|
| Voltages | 0.95 p.u. | 1.10 p.u. |
| Tap Settings | 0.90 p.u. | 1.10 p.u. |
| Compensation Devices | −20 MVAR | 20 MVAR |
| Control Variables | ABC | PSO | GSA | CFA | GWO | Control Variables | ABC | PSO | GSA | CFA | GWO |
|---|---|---|---|---|---|---|---|---|---|---|---|
| V1 | 1.0512 | 1.0600 | 0.9600 | 1.0271 | 0.9903 | V90 | 1.0210 | 0.9905 | 1.0417 | 1.04222 | 1.0522 |
| V4 | 1.0757 | 0.9400 | 0.9620 | 1.0581 | 1.0094 | V91 | 1.0172 | 1.0015 | 1.0032 | 1.04552 | 1.0251 |
| V6 | 1.0791 | 0.9514 | 0.9729 | 1.0506 | 1.0208 | V92 | 1.0914 | 1.0600 | 1.0927 | 1.0485 | 1.0385 |
| V8 | 1.0656 | 0.9820 | 1.0570 | 1.0400 | 0.9697 | V99 | 1.0598 | 0.9938 | 1.0433 | 1.05421 | 1.0064 |
| V10 | 1.0461 | 0.9522 | 1.0885 | 1.0573 | 1.0721 | V100 | 1.0535 | 1.0264 | 1.0786 | 1.05881 | 1.0486 |
| V12 | 1.0726 | 1.0564 | 0.9630 | 1.0474 | 1.0095 | V103 | 1.0394 | 0.9400 | 1.0266 | 1.04916 | 1.0647 |
| V15 | 1.0265 | 0.9560 | 1.0127 | 1.0465 | 0.9764 | V104 | 1.0215 | 1.0600 | 0.9808 | 1.03833 | 1.0247 |
| V18 | 1.0314 | 0.9400 | 1.0069 | 1.0492 | 0.9616 | V105 | 1 1.10 | 1.0600 | 1.0163 | 1.03531 | 1.0329 |
| V19 | 1.0155 | 0.9400 | 1.0003 | 1.0453 | 0.9672 | V107 | 1.0463 | 1.0086 | 0.9987 | 1.02247 | 1.0469 |
| V24 | 1.0201 | 0.9400 | 1.0105 | 1.0518 | 1.0412 | V110 | 1 1.03 | 0.9914 | 1.0218 | 1.03178 | 1.0298 |
| V25 | 1.0489 | 0.9884 | 1.0102 | 1.0599 | 1.0950 | V111 | 1.0888 | 0.9430 | 0.9852 | 1.03948 | 1.0179 |
| V26 | 1.0539 | 0.9930 | 1.0401 | 1.06 | 0.9682 | V112 | 1.0636 | 0.9741 | 0.9500 | 1.01614 | 1.0090 |
| V27 | 1.0204 | 0.9670 | 0.9809 | 1.0447 | 1.0098 | V113 | 1.0588 | 0.9615 | 0.9764 | 1.0554 | 1.0594 |
| V31 | 1.0392 | 0.9400 | 0.9500 | 1.0403 | 1.0003 | V116 | 1.0444 | 0.9400 | 1.0372 | 1.05743 | 1.0324 |
| V32 | 1.0367 | 1.0030 | 0.9552 | 1.0432 | 1.0046 | QC5 | 0 | 20.000 | 0.0000 | −19.92 | 1.0050 |
| V34 | 1.0367 | 0.9400 | 0.9910 | 1.0568 | 1.0080 | QC34 | 12.616 | −9.493 | 7.4600 | 7.47 | 0.9954 |
| V36 | 1.0440 | 1.0078 | 1.0091 | 1.0551 | 1.0051 | QC37 | 0 | 20.000 | 0.0000 | −5.06 | 1.0284 |
| V40 | 0.9912 | 0.9739 | 0.9505 | 1.0357 | 0.9668 | QC44 | 5.3918 | −9.0616 | 6.0700 | 4.46 | 1.0034 |
| V42 | 0.9875 | 0.9450 | 0.9500 | 1.0373 | 0.9618 | QC45 | 10 | 20.000 | 3.3300 | 1.63 | 0.9990 |
| V46 | 1.0325 | 1.0392 | 0.9814 | 1.0461 | 0.9960 | QC46 | 6.214 | 19.998 | 6.5100 | 9.55 | 1.0447 |
| V49 | 1.0183 | 0.9806 | 1.0444 | 1.0594 | 1.0005 | QC48 | 4.9873 | −3.2423 | 4.4700 | 3.35 | 0.9458 |
| V54 | 0.9776 | 1.0600 | 1.0379 | 1.0362 | 0.9305 | QC74 | 9.4985 | −17.185 | 9.7200 | 0.0 | 0.9281 |
| V55 | 0.9754 | 0.9736 | 0.9907 | 1.0351 | 0.9301 | QC79 | 14.9964 | 3.9148 | 14.250 | 0.0 | 0.9103 |
| V56 | 0.9801 | 0.9715 | 1.0333 | 1.0354 | 0.9308 | QC82 | 9.3574 | 19.998 | 17.490 | 0.0 | −26.90 |
| V59 | 1.0235 | 1.0600 | 1.0099 | 1.0592 | 0.9495 | QC83 | 3.6167 | 20.000 | 4.2800 | 0.0 | 6.3230 |
| V61 | 1.0400 | 0.9482 | 1.0925 | 1.06 | 0.9700 | QC105 | 17.1048 | −18.989 | 12.040 | 4.65 | −10.63 |
| V62 | 1.0517 | 1.0600 | 1.0393 | 1.0560 | 0.9819 | QC107 | 2.0274 | −20.000 | 2.2600 | 4.19 | 3.3801 |
| V65 | 1.0591 | 0.9953 | 0.9998 | 1.06 | 0.9870 | QC110 | 1.8493 | −20.000 | 2.9000 | 2.25 | 4.3057 |
| V66 | 1.0319 | 0.9400 | 1.0355 | 1.06 | 1.0032 | T8 | 1.0768 | 1.0059 | 1.0659 | 0.98 | 8.9977 |
| V69 | 1.0291 | 1.0330 | 1.1000 | 1.06 | 1.0544 | T32 | 0.9655 | 1.1000 | 0.9534 | 1.06 | 5.9038 |
| V70 | 0.9777 | 0.9952 | 1.0992 | 1.0351 | 1.0477 | T36 | 1.0601 | 1.0110 | 0.9328 | 0.98 | 4.8237 |
| V72 | 1.0258 | 0.9498 | 1.0014 | 1.0405 | 1.0097 | T51 | 1.0081 | 1.0110 | 1.0884 | 0.99 | 4.4373 |
| V73 | 0.9572 | 0.9400 | 1.0111 | 1.0351 | 1.0418 | T93 | 1.0509 | 1.0001 | 1.0579 | 0.98 | 13.274 |
| V74 | 0.9691 | 0.9400 | 1.0476 | 1.0223 | 1.0073 | T95 | 1.0283 | 1.0155 | 0.9493 | 1.00 | 6.1881 |
| V76 | 0.9908 | 0.9400 | 1.0211 | 1.0048 | 1.0212 | T102 | 0.9962 | 1.1000 | 0.9975 | 0.99 | 5.5461 |
| V77 | 1.0209 | 0.9935 | 1.0187 | 1.0456 | 1.0410 | T107 | 0.9356 | 0.9243 | 0.9887 | 0.95 | 4.3820 |
| V80 | 1.0542 | 0.9400 | 1.0462 | 1.0598 | 1.0476 | T127 | 0.9541 | 0.9589 | 0.9801 | 0.99 | 2.3813 |
| V85 | 1.0121 | 0.9887 | 1.0491 | 1.0510 | 1.0604 | Loss (MW) | 136.99 | 131.897 | 127.760 | 114.766 | 109.744 |
| V87 | 1.0120 | 0.9642 | 1.0426 | 1.0578 | 0.9390 | V.D (pu) | 1.195 | 1.2738 | 1.305 | 1.178 | 1.0935 |
| V89 | 1.0067 | 1.0026 | 1.0955 | 1.06 | 1.0984 |
| Variables | Lower Limit | Upper Limit |
|---|---|---|
| Generated Power | 0.05 p.u. | 3.60 p.u. |
| Voltages | 0.95 p.u. | 1.10 p.u. |
| Tap Settings | 0.90 p.u. | 1.10 p.u. |
| Compensation Devices | −20 MVAR | 20 MVAR |
| Control Variables | GWO | Control Variables | GWO | Control Variables | GWO | Control Variables | GWO | Control Variables | GWO |
|---|---|---|---|---|---|---|---|---|---|
| P1 | 86.454 | P65 | 46.411 | V1 | 1.0590 | V65 | 1.0689 | QC5 | −15.149 |
| P4 | 56.449 | P66 | 40.835 | V4 | 0.9808 | V66 | 1.0044 | QC34 | 6.0664 |
| P6 | 58.338 | P69 | 37.066 | V6 | 1.0001 | V69 | 1.0790 | QC37 | −3.6222 |
| P8 | 50.098 | P70 | 125.69 | V8 | 0.9932 | V70 | 1.0398 | QC44 | 6.6938 |
| P10 | 34.288 | P72 | 74.627 | V10 | 1.0160 | V72 | 1.0040 | QC45 | 4.4421 |
| P12 | 69.599 | P73 | 63.114 | V12 | 1.0024 | V73 | 1.1000 | QC46 | 1.2265 |
| P15 | 147.08 | P74 | 54.139 | V15 | 1.0183 | V74 | 1.0660 | QC48 | 6.4032 |
| P18 | 91.052 | P76 | 57.223 | V18 | 1.0410 | V76 | 1.0925 | QC74 | 8.2857 |
| P19 | 51.930 | P77 | 27.555 | V19 | 1.0120 | V77 | 1.0836 | QC79 | 8.5603 |
| P24 | 58.426 | P80 | 285.23 | V24 | 1.0254 | V80 | 1.0320 | QC82 | 9.7719 |
| P25 | 73.794 | P85 | 57.696 | V25 | 0.9639 | V85 | 0.9783 | QC83 | 6.8119 |
| P26 | 40.294 | P87 | 72.549 | V26 | 1.0588 | V87 | 1.0465 | QC105 | 5.8368 |
| P27 | 217.58 | P89 | 46.538 | V27 | 1.0296 | V89 | 1.0653 | QC107 | 3.3788 |
| P31 | 36.545 | P90 | 63.959 | V31 | 1.0336 | V90 | 1.0177 | QC110 | 2.9052 |
| P32 | 63.325 | P91 | 54.807 | V32 | 1.0341 | V91 | 1.0518 | T8 | 0.9381 |
| P34 | 21.061 | P92 | 244.41 | V34 | 1.0187 | V92 | 1.0812 | T32 | 0.9463 |
| P36 | 66.161 | P99 | 32.159 | V36 | 1.0075 | V99 | 0.9812 | T36 | 0.9854 |
| P40 | 23.633 | P100 | 44.170 | V40 | 0.9910 | V100 | 1.0375 | T51 | 1.0402 |
| P42 | 161.63 | P103 | 55.985 | V42 | 1.0219 | V103 | 1.0576 | T93 | 1.0500 |
| P46 | 75.908 | P104 | 56.302 | V46 | 1.0768 | V104 | 0.9716 | T95 | 0.9112 |
| P49 | 16.549 | P105 | 34.894 | V49 | 1.0336 | V105 | 0.9981 | T102 | 1.0005 |
| P54 | 64.019 | P107 | 140.97 | V54 | 1.1000 | V107 | 0.9591 | T107 | 0.9756 |
| P55 | 80.821 | P110 | 53.026 | V55 | 1.0706 | V110 | 1.0584 | T127 | 0.9471 |
| P56 | 14.430 | P111 | 36.054 | V56 | 1.0535 | V111 | 1.0359 | Loss (MW) | 68.1578 |
| P59 | 306.06 | P112 | 89.350 | V59 | 1.0948 | V112 | 1.0850 | ||
| P61 | 81.501 | P113 | 58.478 | V61 | 1.0169 | V113 | 1.0399 | V.D (p.u.) | 1.1265 |
| P62 | 67.121 | P116 | 34.454 | V62 | 0.9881 | V116 | 1.0311 |
| Variables | Lower Limit | Upper Limit |
|---|---|---|
| Wind Power | 0.05 p.u. | 0.50 p.u. |
| Generated Power | 0.05 p.u. | 3.60 p.u. |
| Voltages | 1.00 p.u. | 1.10 p.u. |
| Tap Settings | 0.90 p.u. | 1.10 p.u. |
| Compensation Devices | −20 MVAR | 20 MVAR |
| Control Variables | GWO | Control Variables | GWO | Control Variables | GWO | Control Variables | GWO | Control Variables | GWO |
|---|---|---|---|---|---|---|---|---|---|
| P1 | 252.23 | P65 | 35.039 | V1 | 1.0424 | V65 | 1.0343 | QC5 | −4.279 |
| P4 | 122.96 | P66 | 37.903 | V4 | 1.0284 | V66 | 1.0629 | QC34 | 8.7954 |
| P6 | 40.162 | P69 | 59.278 | V6 | 1.0134 | V69 | 1.0677 | QC37 | −2.750 |
| P8 | 18.208 | P70 | 82.197 | V8 | 1.0507 | V70 | 1.0668 | QC44 | 1.0647 |
| P9wind | 27.538 | P72 | 93.435 | V9wind | 0.9688 | V72 | 1.0531 | QC45 | 2.4947 |
| P10 | 9.5797 | P73 | 45.600 | V10 | 1.0686 | V73 | 1.0797 | QC46 | 8.2764 |
| P12 | 51.614 | P74 | 11.502 | V12 | 1.0184 | V74 | 1.0450 | QC48 | 3.6636 |
| P15 | 154.29 | P76 | 64.795 | V15 | 1.0011 | V76 | 1.0526 | QC74 | 11.943 |
| P18 | 26.439 | P77 | 40.345 | V18 | 0.9781 | V77 | 1.0475 | QC79 | 8.7899 |
| P19 | 29.869 | P80 | 290.65 | V19 | 0.9890 | V80 | 1.0553 | QC82 | 7.0112 |
| P24 | 28.433 | P85 | 29.615 | V24 | 1.0309 | V85 | 1.0052 | QC83 | 3.2327 |
| P25 | 52.128 | P87 | 40.991 | V25 | 0.9719 | V87 | 1.0538 | QC105 | 2.9738 |
| P26 | 36.567 | P89 | 50.678 | V26 | 1.0583 | V89 | 1.0225 | QC107 | 3.6681 |
| P27 | 115.63 | P90 | 28.770 | V27 | 0.9903 | V90 | 1.0135 | QC110 | 4.0839 |
| P31 | 13.306 | P91 | 31.469 | V31 | 0.9833 | V91 | 1.0254 | T8 | 1.0291 |
| P32 | 88.117 | P92 | 198.11 | V32 | 0.9888 | V92 | 1.0429 | T32 | 0.9981 |
| P34 | 42.177 | P99 | 42.745 | V34 | 1.0128 | V99 | 1.0509 | T36 | 0.9835 |
| P36 | 32.487 | P100 | 62.002 | V36 | 1.0148 | V100 | 1.0417 | T51 | 1.0279 |
| P40 | 40.382 | P103 | 50.258 | V40 | 1.0022 | V103 | 1.0288 | T93 | 0.9752 |
| P42 | 164.87 | P104 | 92.620 | V42 | 1.0152 | V104 | 1.0373 | T95 | 1.0192 |
| P46 | 119.43 | P105 | 27.045 | V46 | 1.0687 | V105 | 1.0403 | T102 | 0.9224 |
| P49 | 24.695 | P107 | 148.33 | V49 | 1.0536 | V107 | 1.0531 | T107 | 0.9590 |
| P54 | 9.7571 | P110 | 50.260 | V54 | 1.0508 | V110 | 1.0197 | T127 | 0.9192 |
| P55 | 50.429 | P111 | 33.580 | V55 | 1.0556 | V111 | 1.0344 | Loss (MW) | 28.1372 |
| P56 | 53.080 | P112 | 17.323 | V56 | 1.0523 | V112 | 0.9949 | ||
| P59 | 327.36 | P113 | 27.363 | V59 | 1.0730 | V113 | 0.9985 | V.D (pu) | 1.12945 |
| P61 | 138.60 | P116 | 47.297 | V61 | 1.0522 | V116 | 1.0307 | ||
| P62 | 30.217 | V62 | 1.0535 | ||||||
| Wind Turbine Brand | Minimum Required Turbine Numbers | |||
|---|---|---|---|---|
| Profile-1 | Profile-2 | Profile-1 | Profile-2 | |
| Calculated Best Wind Power | 9.8 MW | 9.8 MW | 28.12 MW | 28.12 MW |
| GE-120 (2.5 MW) | 19 | 32 | 54 | 92 |
| Nordex N90 Beta (2.3 MW) | 19 | 30 | 54 | 85 |
| Gamesa G80 (2.0 MW) | 16 | 24 | 50 | 66 |
| Enercon E-66/18.70(1.8 MW) | 21 | 33 | 59 | 94 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Varan, M.; Erduman, A.; Menevşeoğlu, F. A Grey Wolf Optimization Algorithm-Based Optimal Reactive Power Dispatch with Wind-Integrated Power Systems. Energies 2023, 16, 5021. https://doi.org/10.3390/en16135021
Varan M, Erduman A, Menevşeoğlu F. A Grey Wolf Optimization Algorithm-Based Optimal Reactive Power Dispatch with Wind-Integrated Power Systems. Energies. 2023; 16(13):5021. https://doi.org/10.3390/en16135021
Chicago/Turabian StyleVaran, Metin, Ali Erduman, and Furkan Menevşeoğlu. 2023. "A Grey Wolf Optimization Algorithm-Based Optimal Reactive Power Dispatch with Wind-Integrated Power Systems" Energies 16, no. 13: 5021. https://doi.org/10.3390/en16135021
APA StyleVaran, M., Erduman, A., & Menevşeoğlu, F. (2023). A Grey Wolf Optimization Algorithm-Based Optimal Reactive Power Dispatch with Wind-Integrated Power Systems. Energies, 16(13), 5021. https://doi.org/10.3390/en16135021