1. Introduction
In recent years, extreme events such as earthquakes and typhoons have occurred frequently [
1,
2], causing extensive damage to the power system and seriously affecting the safety and stability of the power grid. At the same time, power and communication devices in the distribution network have formed a strong coupling relationship, which can easily cause the interactive propagation of faults between the two sides of the network [
3,
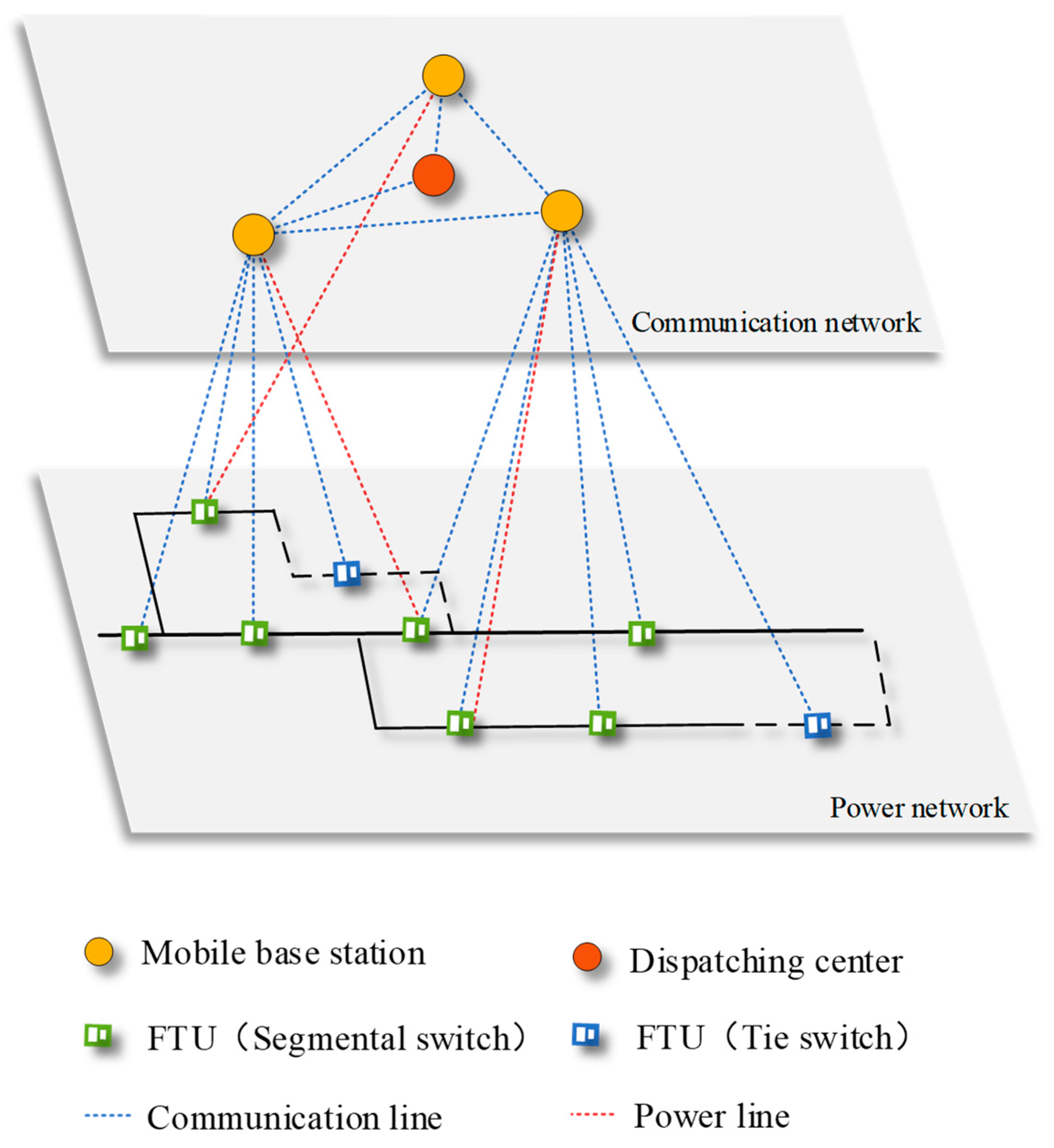
4], leading to cascading failures that can cause major power outages. For example, in July 2021, Zhengzhou, Henan province, experienced severe and extreme rainfall, resulting in significant damage to the power system. In total, 736 transformers failed and 6028 power poles collapsed, leading to a large number of base stations being forced out of service due to power outages. According to statistics, a total of 3152 base stations were affected, disrupting the dispatch automation of the power distribution network and triggering a cascade of failures. This led to the shutdown of 473 power distribution lines, impacting approximately 775,000 households’ electricity supply. Due to various factors, including the type and severity of natural disasters, as well as the resilience and disaster resistance capabilities of the equipment, it is difficult to determine which type of failure is more likely to occur. During natural disasters, power failures result in the loss of power to communication equipment, and communication disruptions, in turn, impact the information retrieval and effective operation of remote control devices. Therefore, coordinating the recovery of both power and communication can enhance the distribution network’s ability to respond to disasters.
Many strategies have been proposed for distribution network fault recovery, which utilizes various resources to flexibly reconfigure the network and reduce power outages and economic loss. Ref. [
5] proposes a global dynamic reconfiguration method applicable to multi-stage switching modes, which enhances large-scale load flow regulation capability. Ref. [
6] considers the capacitor placement problem during distribution network reconfiguration and solves the established mixed-integer linear programming model using CPLEX, effectively reducing node voltage deviations and power loss. Ref. [
7] considers the scale and location of distributed generation (DG) in distribution network reconfiguration. It uses a water cycle algorithm based on a discrete search space to significantly improve the operational efficiency of the distribution network. Refs. [
8,
9] proposes a new radial constraint formula, making distribution network reconfiguration and operation more flexible and enhancing system resilience. However, the above studies do not involve fault repair.
In the recovery process, failure to adjust the network structure after repairing a fault can affect the reliability of the power supply in the distribution network. Reliability is crucial for maintaining system stability, and extensive research has been conducted to explore reliability issues [
10,
11,
12]. Ref. [
13] establishes a multi-stage dynamic recovery model based on traffic and energy networks. It deploys mobile energy storage devices to recover power outages based on rapid reconfiguration, achieving coordination and cooperation of various resources during recovery. Ref. [
14] proposes a coordinated optimization strategy for distribution network fault reconfiguration and repair with distributed generation, considering the time-varying nature of the load and using an improved particle swarm algorithm for a solution. Ref. [
15] proposes a coordinated optimization strategy for distribution network recovery, maintenance personnel, and mobile power dispatch, which is transformed into a mixed-integer linear programming problem. The computational complexity is reduced through preprocessing, improving system resilience. The above studies focus only on the power grid and do not consider the impact of communication failures on distribution network recovery. The actual distribution network recovery process depends on the automated scheduling of communication systems for the power fault location, isolation, and switch action [
16,
17], while the communication system also depends on a continuous and stable power supply from the power side to maintain normal operation [
18,
19]. The power and communication sides constrain each other during the distribution network fault recovery process. Therefore, coordination between the two can make the distribution network more efficient and faster to recover, thereby reducing economic loss caused by faults.
Currently, few studies consider the interaction between power and communication in distribution network fault recovery. Ref. [
20] proposed a fault correlation matrix that reflects the impact of communication failures on the power side. It established a communication-power bi-level optimization model with coupled constraints prioritizing communication recovery. The model was solved using second-order cone relaxation and dynamic routing algorithms. Ref. [
21] quantified the elasticity of distribution networks based on a compound Poisson process, established an optimization model with a cascading failure model, and used an improved simulated annealing algorithm to obtain the optimal repair sequence. Ref. [
22] established a unified repair personnel scheduling and time model based on integrating transportation, communication, and power networks. It converted it into a mixed-integer linear programming problem using an improved single-commodity flow model. These studies did not consider the uncertainty of distributed generation output during fault recovery, which makes it difficult to obtain the optimal control sequence, thereby affecting the stable operation of the distribution network and causing additional economic loss.
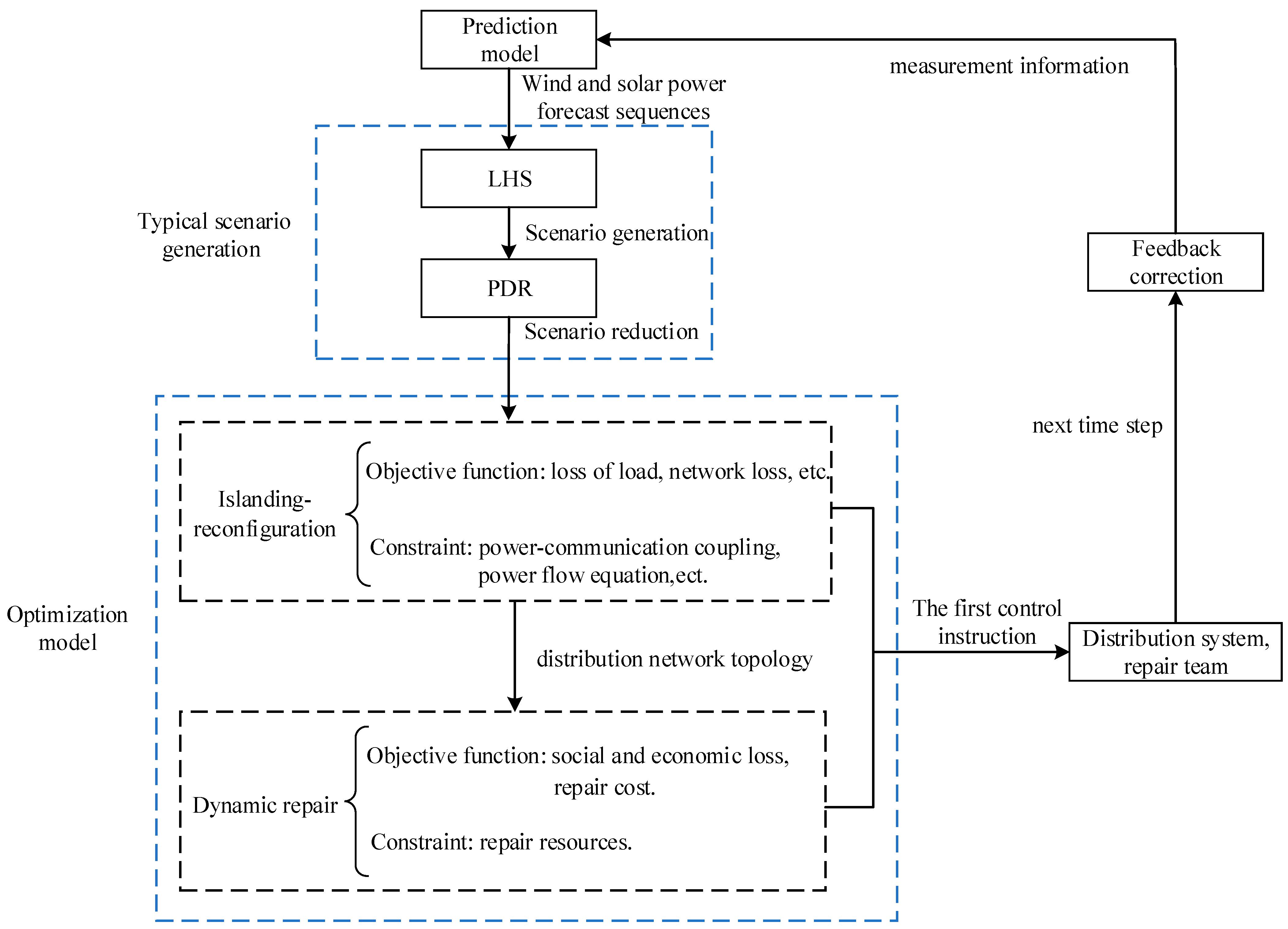
To address the issues mentioned above, this paper proposes a fault recovery strategy for power–communication coupled distribution network with consideration of uncertainty. Firstly, the recovery process is divided into two stages: islanding–reconfiguration and dynamic emergency repair. The joint optimization of power and communication networks is realized by establishing coupling constraints. Secondly, stochastic model predictive control (SMPC) is used to replace a single prediction sequence with a set of scenarios representing different states for rolling optimization to solve the uncertainty of distributed generation output [
23]. Finally, the effectiveness of the proposed method is verified by using the improved IEEE 33-node distribution system.
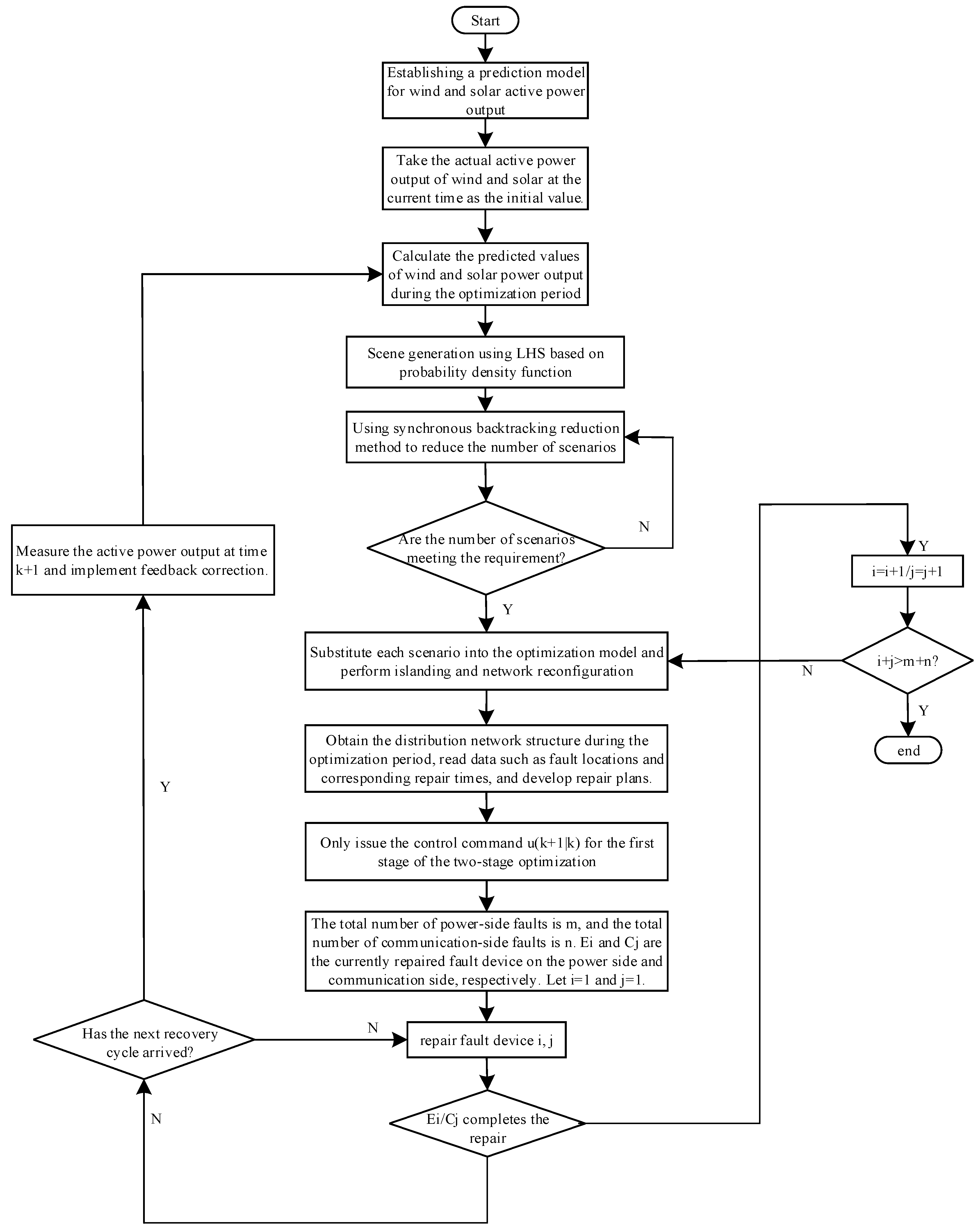
3. Fault Recovery Optimization Model
The optimization model is divided into two parts: islanding–reconfiguration and dynamic repair. After optimization, the control sequences for opening/closing and repair order within the optimization period can be obtained. In order to minimize prediction errors as much as possible, repeated rolling optimization is used instead of a one-time global optimization, and only the first control variable sequence is issued.
3.1. Part 1
Part 1 is islanding–reconfiguration. This part considers the impact of communication failures on the normal operation of segmental and tie switches, achieving load transfer and grid reconfiguration. Firstly, islanding is achieved using a topological search method based on the DG load transfer capability. Then, mathematical programming is used to solve the network reconfiguration of the distribution network.
3.1.1. Objective Function
Optimization is carried out for typical scenarios based on comprehensive consideration of factors such as loss of load, node voltage deviation, and network loss.
where
ps represents the probability of the
s-th scenario;
u1,
u2, and
u3 are the weight values of the loss of load, node voltage deviation, and network loss in the objective function, respectively;
,
, and
are the total loss of load, node voltage deviation, and network loss in the
s-th scenario; and
N is the number of typical scenarios.
where
ωi represents the load level coefficient of node
i, with values of 100, 10, and 1 for the first, second, and third level loads, respectively;
M is the total number of blackout load nodes; and
is the load power cut off at node
i.
The node voltage deviation can measure the degree of voltage offset, and a smaller deviation indicates less voltage fluctuation in the distribution network, resulting in higher power supply reliability.
where
N represents the total number of main network nodes in the distribution network;
Uk represents the voltage value at node
k; and
Us represents the reference voltage value of the distribution network.
where
L represents the set of branches in the distribution network and
kj represents the current status of the segmental switch on branch
j. If it is closed, then
kj equals 1; otherwise,
kj equals 0.
Pj,
Qj, and
Uj, respectively, represent the current active power, reactive power, and voltage magnitude of branch
j.
rj represents the resistance of branch
j.
3.1.2. Constraints
The power and communication sides mutually influence each other during the recovery process, which results in segmental (tie) switch state constraint and power supply constraint.
where
kx(y) represents the status of the segmental switch
x (tie switch
y), and
represents whether communication failure has affected the normal operation of the segmental switch
x (tie switch
y). When
equals 1, there is no impact, and when it equals 0, there is an impact. Ω
a and Ω
b represent the set of segmental switches and tie switches, respectively.
Ci represents the communication node
i, and
represents the power node corresponding to the Mth power supply demand of the communication node
i.
where
Ui and
Uj represent the voltage of node
i and node
j, and
Sij and
Iij represent the apparent power and current of the branch from node
i to node
j, respectively.
Sai,
Zai, and
Iai represent the apparent power, impedance, and current of the branch from node
k to node
i, and
si represents the power capacity access in node
i.
The process of transforming the power flow constraints from a nonlinear programming model to a second-order cone programming model using second-order cone relaxation is not described in detail here [
30].
where
Ui represents the voltage value at node
i; and
Umin and
Umax represent the minimum and maximum voltage values allowed at the node.
where Il is the current flowing through branch l, and Ilmax is the maximum allowed current on branch l.
In order to reduce power losses and improve power supply reliability, the configuration of distribution networks is typically designed in a radial pattern, which means there are no loops.
where
kl represents the binary nominal variable for the switching state of branch
l: where it equals 0, this indicates the branch is open, and where it equals 1, this indicates the branch is closed.
θ represents the set of distribution network lines; and
ns and
nb represent the total number of nodes and the number of root nodes in the distribution network, respectively.
3.2. Part 2
Part 2 is dynamic recovery, in which the distribution network structure may change after each islanding and network reconfiguration, and power and communication failures can be directly or indirectly recovered to achieve load transfer. Therefore, considering the social and economic loss and repair costs comprehensively, the recovery effect is quantified, and the repair order is dynamically adjusted during recovery.
3.2.1. Objective Function
Based on the consideration of factors such as social and economic loss and repair cost, optimization and solution are conducted based on the known structure of the current distribution network.
where
X = (
x1,
x2,…,
xn) represents the repair strategy for the faulty device, and
n is the total number of faulty devices.
λ1 and
λ2 are the weight values of social and economic loss and repair costs, respectively.
g1(
X) and
g2(
X) represent the current repair strategy’s social and economic loss and repair costs.
Social and economic loss involves the loss of load and the time required for fault repair at each recovery stage. Therefore, optimizing social and economic loss is beneficial for supplying power to as many users as possible, reducing the impact of faults, and enhancing the reliability of the distribution network.
where
T(
xi) represents the time when the faulty device
xi is repaired, and
represents the total power loss of load level
j when repairing the faulty device
xi.
where
mg is the fixed cost for repairing the faulty device.
and
are the time when the last fault is repaired by the power repair team and the communication repair team, respectively.
T(
x0) is the starting time of the repair.
r,
v, and
l represent the labor cost per unit time of each repair team, the driving speed of the repair vehicle, and the unit travel cost, respectively.
3.2.2. Constraints
Power and communication faults can be repaired only by corresponding types of repair teams, and each repair team can repair only one faulty device at a time.
where
ne represents the number of power system faults, and
nc represents the number of communication faults.
and
, respectively, indicate whether power device
i and communication device
j are being repaired by the power repair team
re and communication repair team
rc at the current time. A value of 1 indicates that they are being repaired, while 0 indicates that they have not been repaired yet.
Regardless of the type of fault, it is considered completely recovered after one repair, and there is no need for further repairs.
where
k represents the faulty device; Ω
r represents the set of power and communication faulty devices;
Dk(
xi) indicates whether the repair order of the faulty device
k is the
i-th: if yes, then
Dk(
xi) = 1, otherwise
Dk(
xi) = 0.
5. Example Analysis
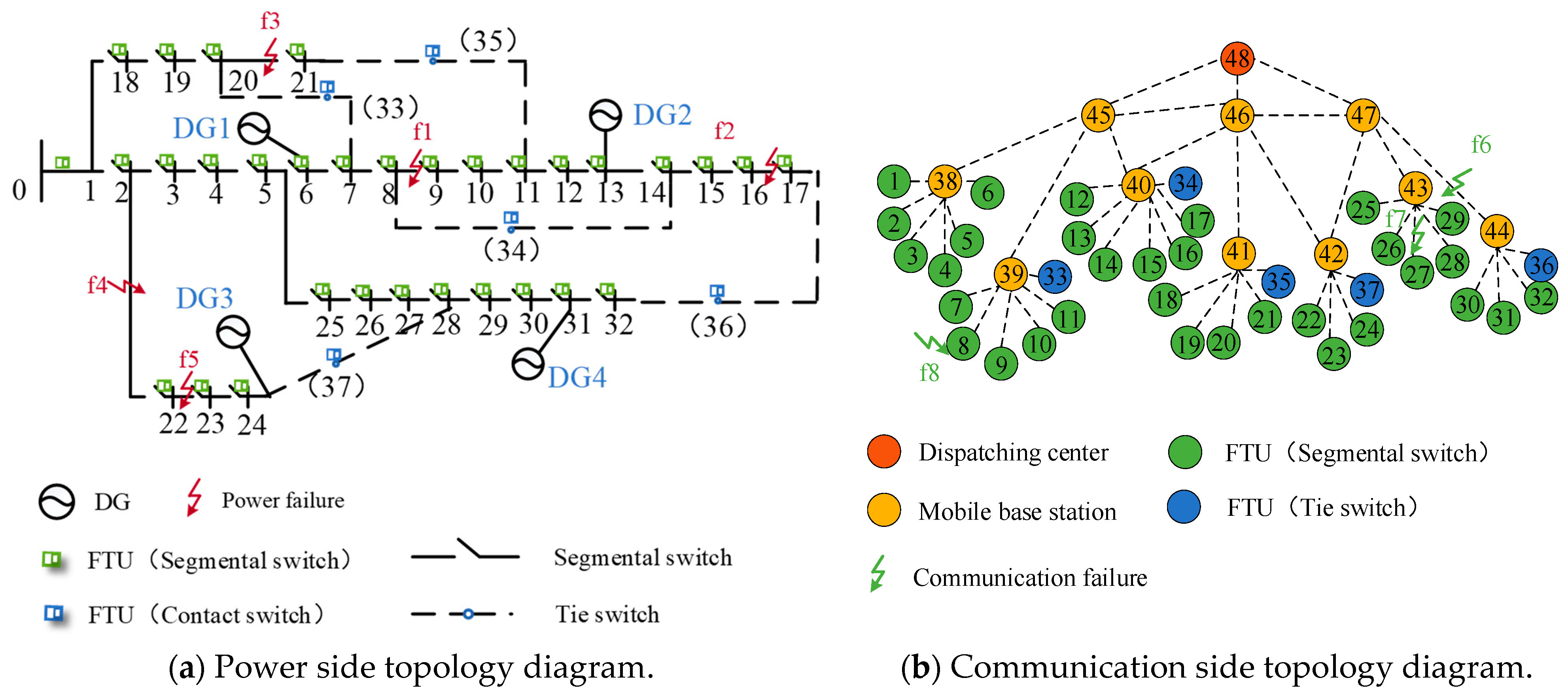
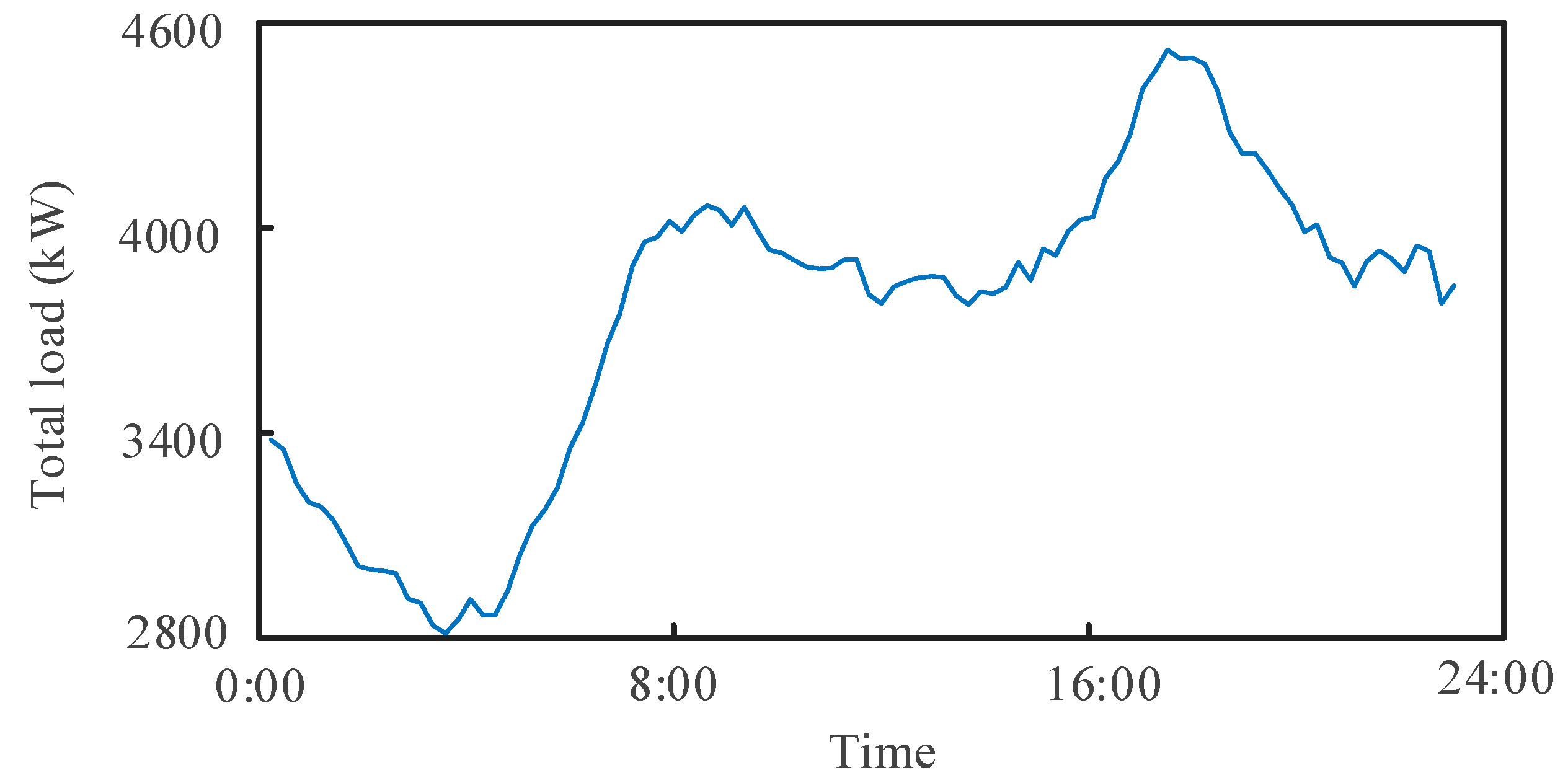
This article uses the IEEE 33-node distribution system for simulation verification, and we adhere to the grid code specified by GB 50052-2009. The grid code provides technical requirements and guidelines for the operation and connection of power systems. The connection points for DG1, DG2, DG3, and DG4 are manually set to nodes 6, 13, 24, and 31, respectively. The maximum power capacities are manually set to 800 kW, 800 kW, 1200 kW, and 1200 kW for DG1, DG2, DG3, and DG4, respectively. DG1 and DG2 are photovoltaic power generation, while DG3 and DG4 are wind power generation. Additionally, it is set that DG1 is restricted to operate within the main distribution network and is unable to form an island independently. The load profile and node load parameters are shown in Appendix
Figure A2 and
Table A1, respectively. The power line fault is approximately located in the middle of adjacent power nodes. Taking power node “0” as the origin, the power node and communication node coordinates are shown in Appendix
Table A2 and
Table A3. It is assumed that there is one power repair team and one communication repair team at power node “0”. The fixed repair costs for power and communication faults are 1000 and 2000 yuan, respectively, and the repair time for the faulty device is half an hour. The repair vehicle speed is 60 km per hour, costing 10 yuan per kilometer. The labor cost is 100 yuan per hour, and the recovery starts at 12:00. The rolling optimization interval in this article is 15 min, and the optimization period is 1 h. The number of scenarios generated by LHS is set to 1000, and the reduced typical scenarios number is 5. The CPLEX solver in MATLAB 2018a was used to solve the optimization model.
Assuming that there are five power faults and three communication faults in the distribution network, the power faults are located on power lines 8–9, 16–17, 20–21, 2–22, and 22–23, and the communication faults are caused by the failure of wireless transmission on 44–47 due to the communication base station-44 fault, the failure of the control command receiving device on 27–43 caused by the FTU-27 failure, and the location error caused by the information monitoring device failure on FTU-8. The power and communication topology of the distribution network are shown in
Figure 4a,b.
Table 1 and
Table 2, respectively, show the coupled network’s power supply and control relationships.
5.1. Simulation Results Analysis
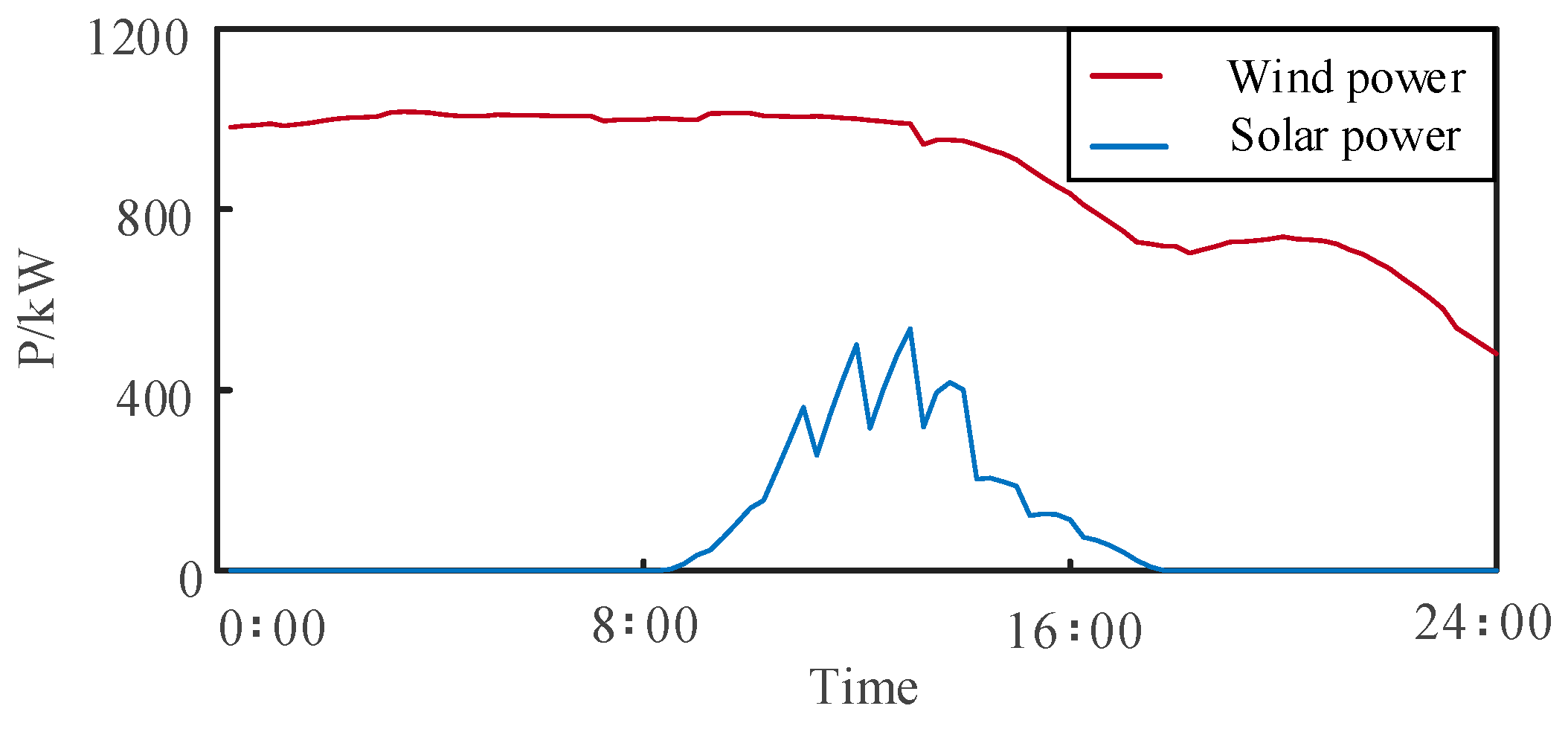
The predicted wind and solar power output on the day of the fault is shown in
Figure 5.
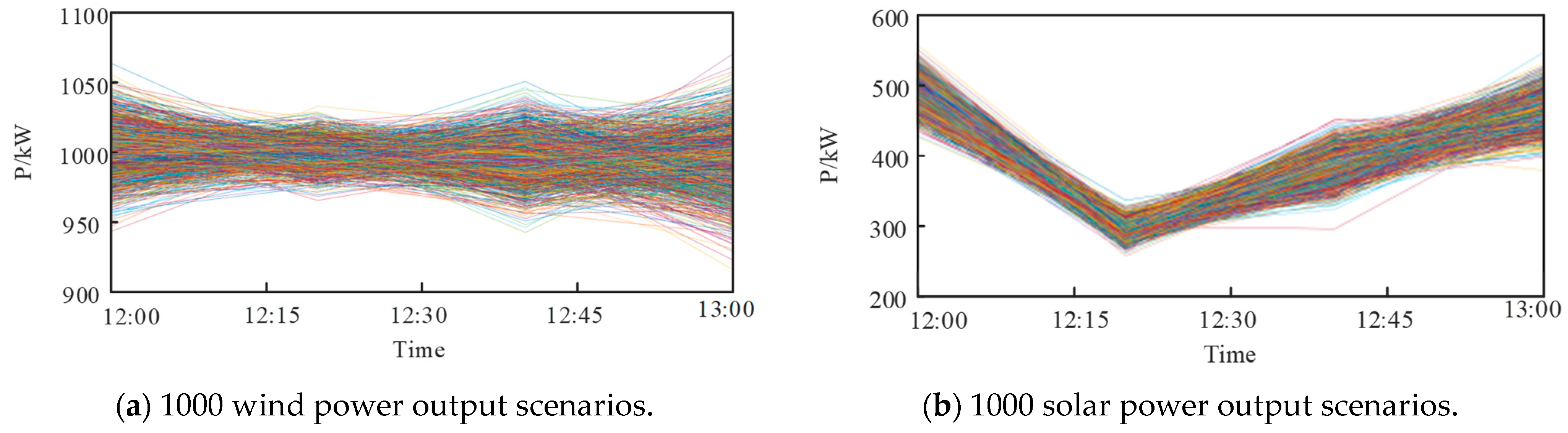
Figure 6a,b shows 1000 wind and solar power output scenarios generated by LHS in the first optimization period.
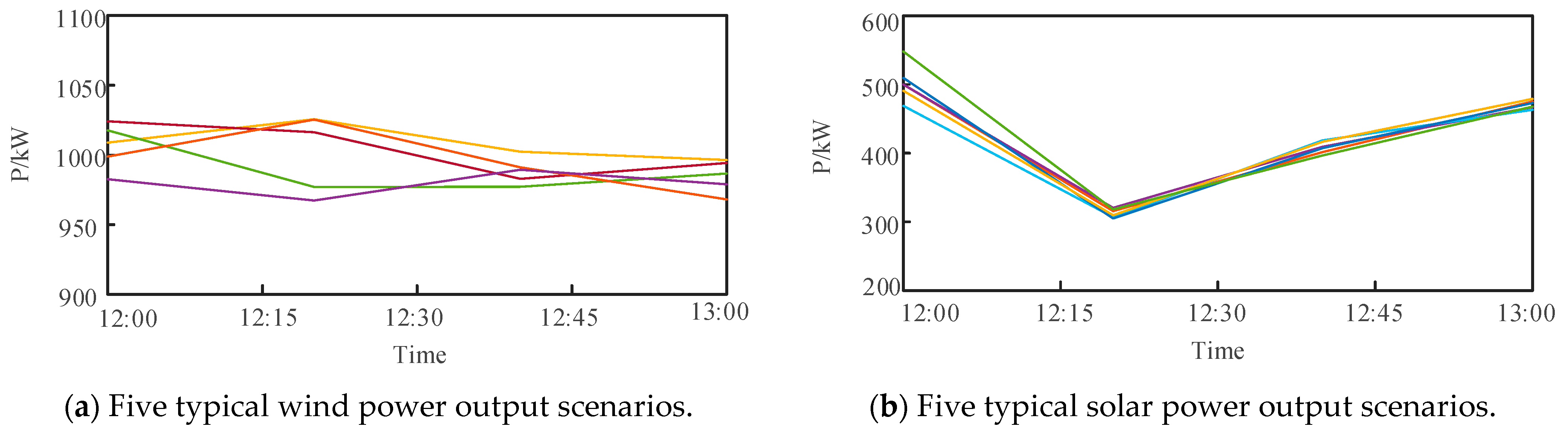
Figure 7a,b shows five typical wind and solar power output scenarios obtained after scenario reduction in the first optimization period.
Typical wind and solar output scenarios were used to optimize the control sequence for each optimization period. Rolling optimization was used instead of global optimization to minimize prediction errors, and only the first control variable sequence was issued. The device being repaired by the repair team was not included in the optimization of the repair order. Therefore, the focus was on the topology and repair order of the distribution network when the eight faults were repaired.
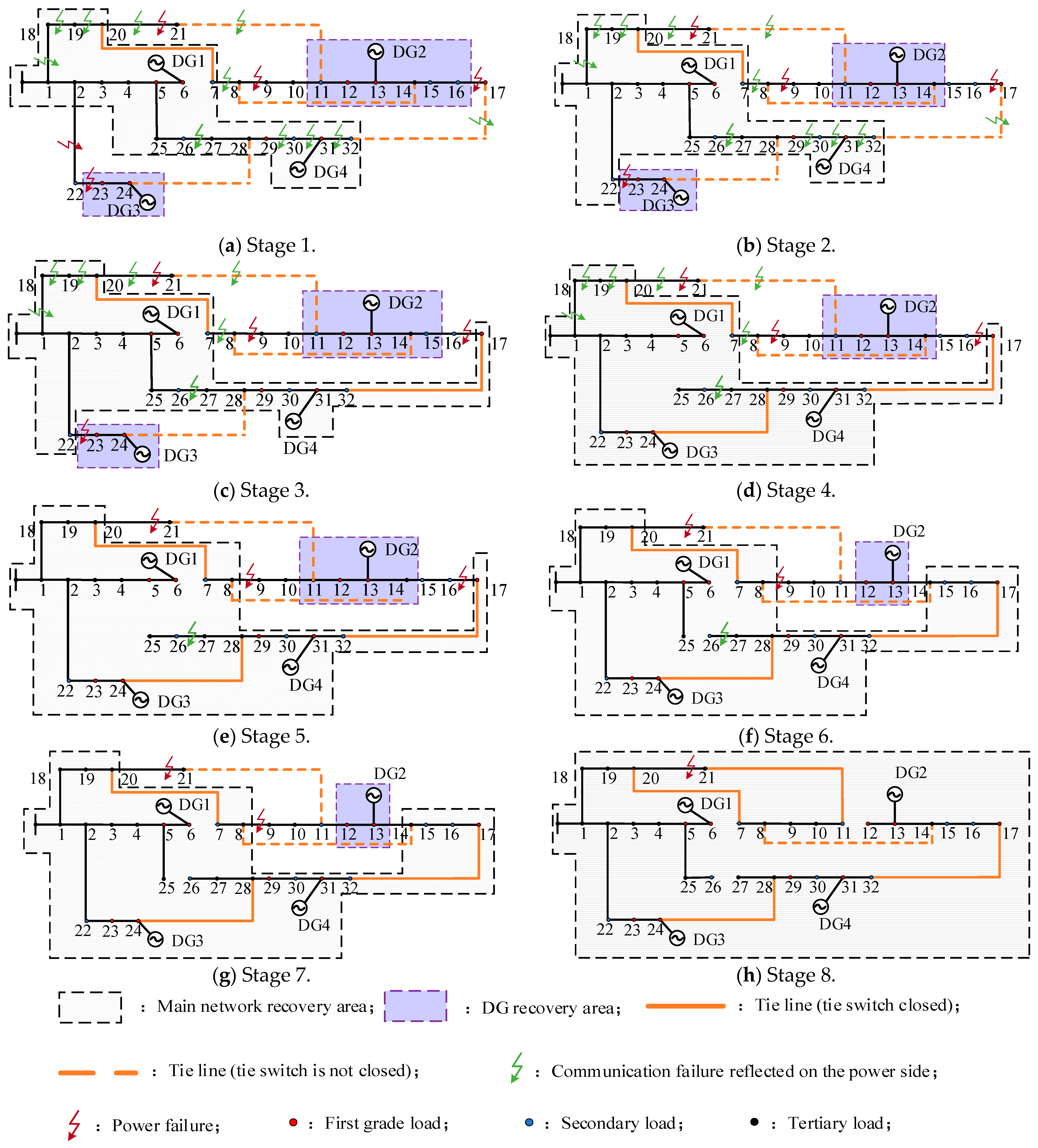
Figure 8 shows the topology of the distribution network in each stage of fault recovery, and
Table 3 shows the repair order in each stage.
As shown in
Figure 8 and
Table 3, with the repair of faulty devices and the continuous change of DG output, the distribution network topology and the blackout load will also change, and the repair order will be dynamically adjusted.
Table 3 shows that the power repair order in stage 3 has changed compared to stage 2. The reason is that when f6 (communication base station-44) is repaired, tie switch-36 can receive the control command from the dispatch center. Before f6 is repaired, f2 was arranged to be repaired last because it is too far from the repair team and takes longer to repair. Additionally, tie switch-36 cannot receive the control command, so it cannot be closed, and repairing f2 first will not recover power to any blackout load. After f6 is repaired, it is predicted that the photovoltaic output will gradually decrease in the next hour, causing secondary load-15 to leave the island. Repairing f2 directly recovers secondary load-16 and indirectly reduces the amount of future blackout load. Repairing f3 and f1 correspond to recovering tertiary load-21 and cannot recover any load, respectively. The disadvantage of repairing f2 is that the overall repair time takes too long, leading to social and economic loss and increased repair cost. The optimal solution in stage 3 corresponds to prioritizing the repair of f2, so the benefits outweigh the drawbacks, and the repair order is changed.
The power repair order in stage 5 has also changed compared to stage 4. When the information monitoring device of FTU-8 is repaired, the measurement information in that section can be transmitted to the dispatch center, so the fault location is reidentified. The dispatch center believes that the power nodes in sections 8 and 9 have not failed and sends instructions to open and close the switch in segments. On the one hand, load-8 is recovered, and the corresponding communication base station-41 also resumes service, so the relevant segmental switch and tie switch can work normally. On the other hand, repairing f1 can recover loads 9 and 10, resulting in a change in the repair order, with f1 being repaired before f3.
5.2. Comparison of Different Control Methods
Case 1 (deterministic optimization): considering the fluctuation of DG output, but only one optimization was performed using the forecast data for the following day.
Case 2 (MPC): considering the fluctuation of DG output, reducing the influence of uncertainty, and implementing rolling optimization.
Case 3 (RMPC): Robust Model Predictive Control (RMPC) based on MPC and robust optimization theory, the modeling of DG output is performed using interval values, further reducing the impact of uncertainty [
35].
Case 4 (SMPC): based on MPC, considering typical scenarios, further reducing the impact of uncertainty.
Case 1 involves a single global optimization without considering the uncertainty of DG output. In Case 2, rolling optimization is used to reduce the impact of uncertainty. Both Case 3 and Case 4 further reduce the DG uncertainty. Comparing the two, Case 3 is better suited for extreme situations but can be overly conservative. On the other hand, Case 4 considers typical scenarios, enabling better adaptation to different situations and providing robust control strategies, although it may have limited capabilities in handling rare or extreme cases.
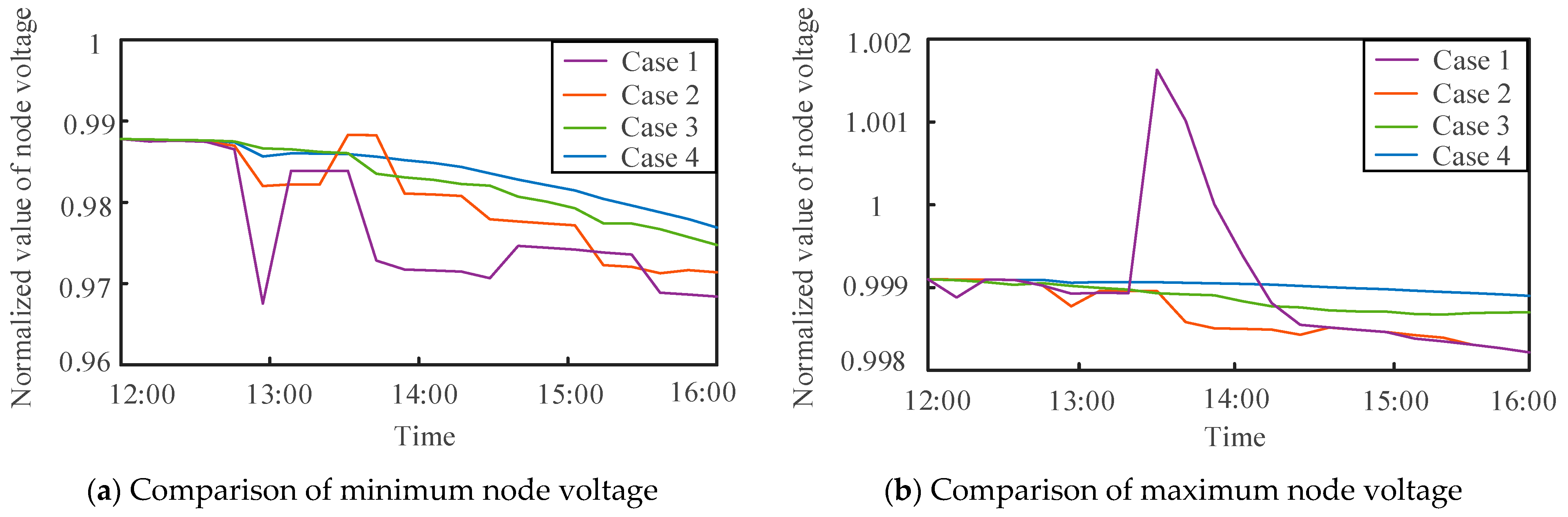
5.2.1. Comparison of Node Voltages
Using the four different control methods to implement fault recovery, and comparing the real-time minimum and maximum node voltage values of the four methods,
Figure 9 shows the node voltage values under different control methods.
According to
Figure 9, the node voltage deviation is the largest for the method without MPC, because it performs only one global optimization, leading to large errors in the DG power prediction. The MPC method improves the prediction accuracy by considering the fluctuation of DG output and using rolling optimization to obtain the optimal control sequence, resulting in a significant reduction in node voltage deviation. RMPC and SMPC further reduce the impact of uncertainty by utilizing interval modeling and typical scenario approximation, respectively. As a result, the node voltage deviation values are smaller compared to other methods, which is beneficial for the safe and stable operation of the system. Comparing RMPC and SMPC, SMPC generally outperforms RMPC because it can better adapt to different situations, while RMPC tends to be more conservative and shows advantages only in extreme cases.
5.2.2. Comparison of Optimization Results
The results of the four methods are shown in
Table 4. It can be seen from the comparison that the method without MPC has the highest social and economic loss and repair time values, mainly because it only performs one global optimization, and it is difficult to obtain optimal network reconfiguration and repair order instructions. For example, in this case, f2 was repaired as a priority in the third stage, but the method without MPC did not change the repair order, resulting in a delay in the recovery of secondary load-16, causing additional economic loss. MPC, RMPC, and SMPC have the capability of rolling optimization, enabling them to dynamically adjust network architecture and repair order. As a result, these three methods exhibit significant reductions in social and economic loss. Compared to MPC, both RMPC and SMPC demonstrate lower social and economic loss because they further reduce the impact of DG output uncertainty and can potentially recover more power during network reconfiguration by obtaining relatively optimal control sequences. When comparing RMPC and SMPC, SMPC achieves better fault recovery performance due to its superior adaptability.
5.3. Sensitivity Analysis
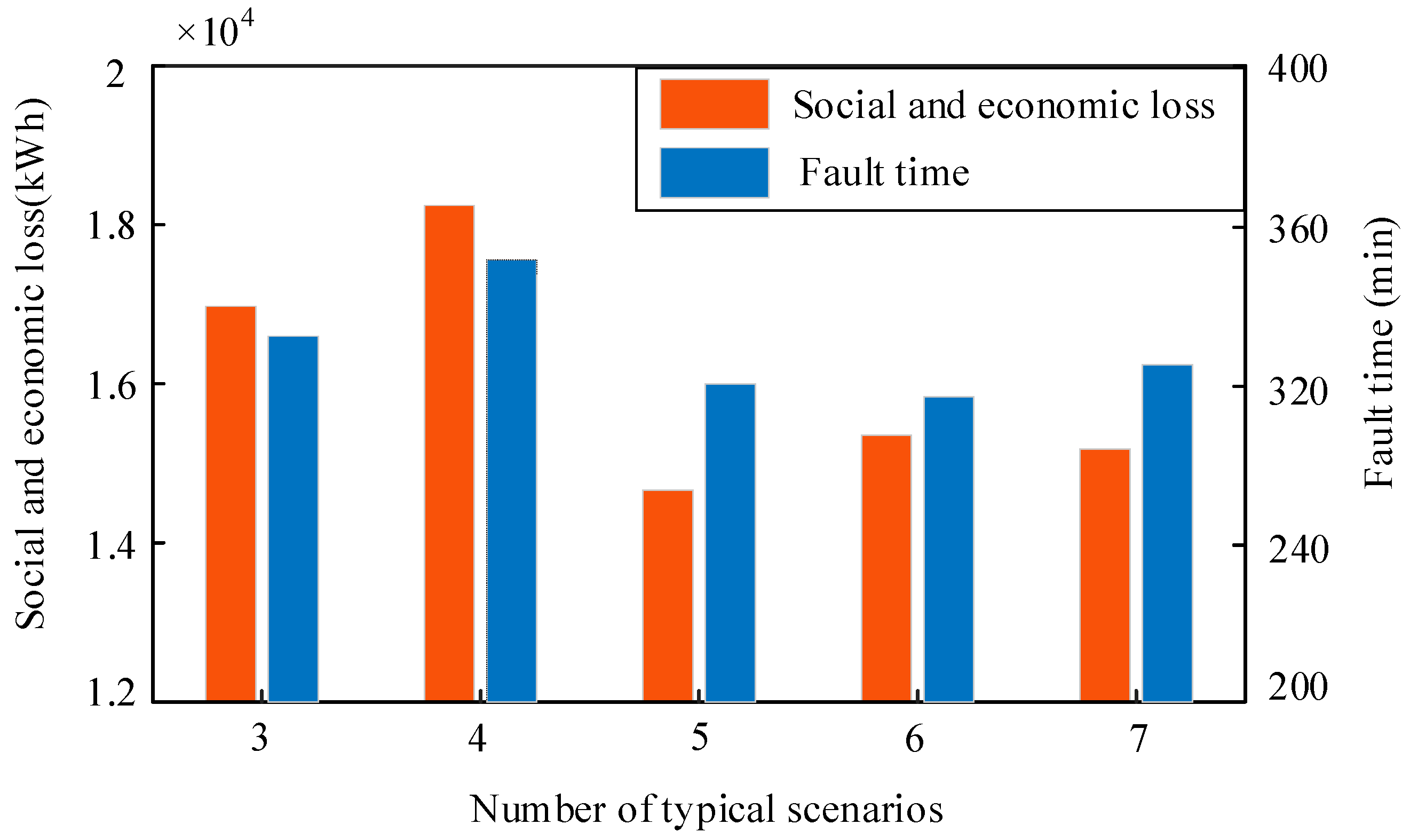
5.3.1. Analysis of Typical Scenario Numbers
The optimization results often vary with different numbers of typical scenarios. Assuming that the number of typical scenarios is 3, 4, 5, 6, and 7,
Figure 10 compares the fault recovery effects for different numbers of typical scenarios. If the number of typical scenarios is too small, it is difficult to eliminate the uncertainty of DG output, which affects the recovery effect. On the other hand, too many typical scenarios increase the computational complexity, so an appropriate number of scenarios needs to be selected. From
Figure 10, it can be seen that, when the number of typical scenarios increases to 5, the loss and repair time are relatively small, and further increasing the number of scenarios has little effect on the fault recovery performance. Therefore, the number of typical scenarios is set to five.
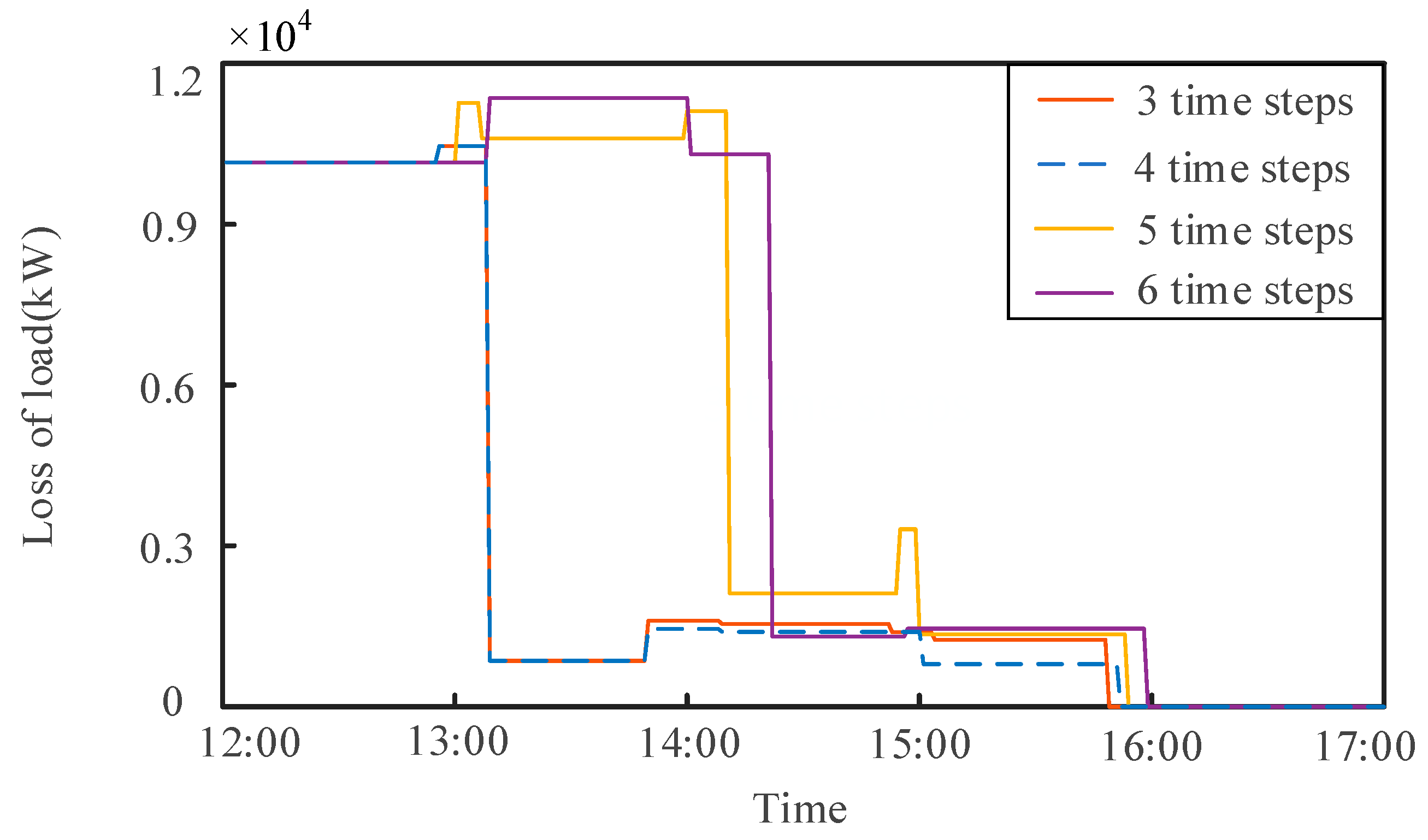
5.3.2. Prediction Horizon Analysis
To discuss the impact of different prediction horizons based on SMPC on power recovery results, we assume that the prediction horizon includes 3, 4, 5, and 6 time steps, each with a time interval of 15 min. The impact of different prediction horizons on recovery results is shown in
Figure 11.
As shown in
Figure 11, the impact of the multi-horizon recovery strategy based on SMPC on the recovery results was compared. It can be seen that the area below the curve corresponding to the four time steps is the smallest, which means the minimum social and economic loss, and the total time is shorter. The number of predicted time steps is not a case of the larger, the better. Suppose the number of predicted time steps is too large. In that case, the prediction error of DG output will increase, reducing the recovery strategy’s effectiveness and bringing a computational burden. Therefore, selecting the appropriate prediction horizon can better play the role of the RMPC method.
6. Conclusions
Considering the concurrent fault effect of the power side and communication side, we proposed a coordinated power–communication distribution network reconfiguration and dynamic repair joint optimization strategy. The following conclusions are described.
- (1)
The power–communication coupling constraint establishes a coupling relationship between the power side and the communication side, reflecting real-time information on the power outage load, faulty equipment locations, and quantities during the fault recovery process. This provides a basis for decision making.
- (2)
The proposed fault recovery strategy in this paper consists of two stages: islanding and network reconfiguration, followed by recovery. The strategy considers the impact of power–communication coupling and uncertainty. The optimization model is solved using the CPLEX solver. Simulation results based on the IEEE 33-node system demonstrate that the proposed method achieves fault recovery in power–communication coupled distribution networks.
- (3)
Compared to deterministic optimization, MPC, and RMPC, SMPC reduce social and economic loss by 36.8%, 15.9%, and 5.6%, respectively, and have a relatively shorter recovery time. This indicates that, by reducing the impact of distributed generation output uncertainty, SMPC can achieve more optimal recovery plans.
The proposed method in this study addresses the challenge of cascading failures caused by power–communication coupling in distribution networks, which can impact the recovery process. Moreover, it enables accelerated load recovery and reduces power outage losses during this process. Furthermore, there is a lack of in-depth consideration of real road conditions, including traffic congestion and actual pathways, which may influence the recovery strategy. Therefore, these factors will be taken into account in future research.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










