


Optimizing Energy Harvesting: A Gain-Scheduled Braking System for Electric Vehicles with Enhanced State of Charge and Efficiency



Abstract
1. Introduction
2. Related Work
3. Methodology
3.1. Vehicle Dynamics
- Vehicle mass is distributed equally on each wheel.
- Lateral, yawing, pitch, and roll dynamics are omitted.
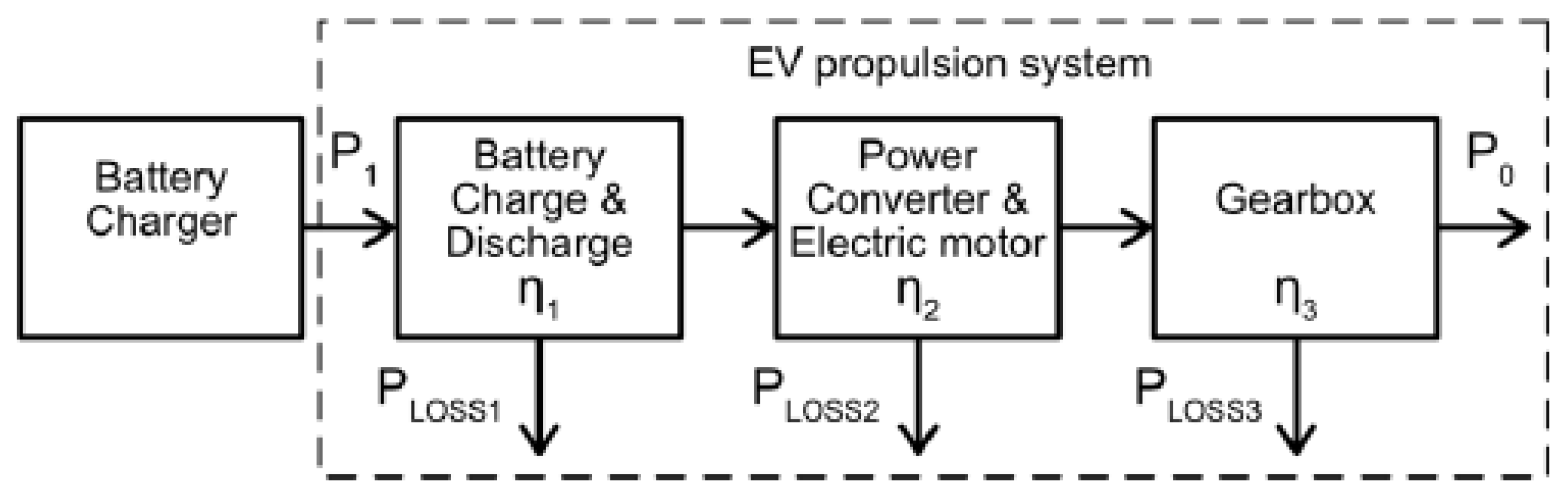
3.2. Overall Efficiency
- P1 = Input power
- P0 = Output power
- Ploss1 = Power losses in battery
- Ploss2 = Power losses in converter and electric motor
- Ploss3 = Power losses in gear box
- = Battery efficiency
- = Power converter and electric motor efficiency
- = Gearbox efficiency.
3.3. Driving Cycle
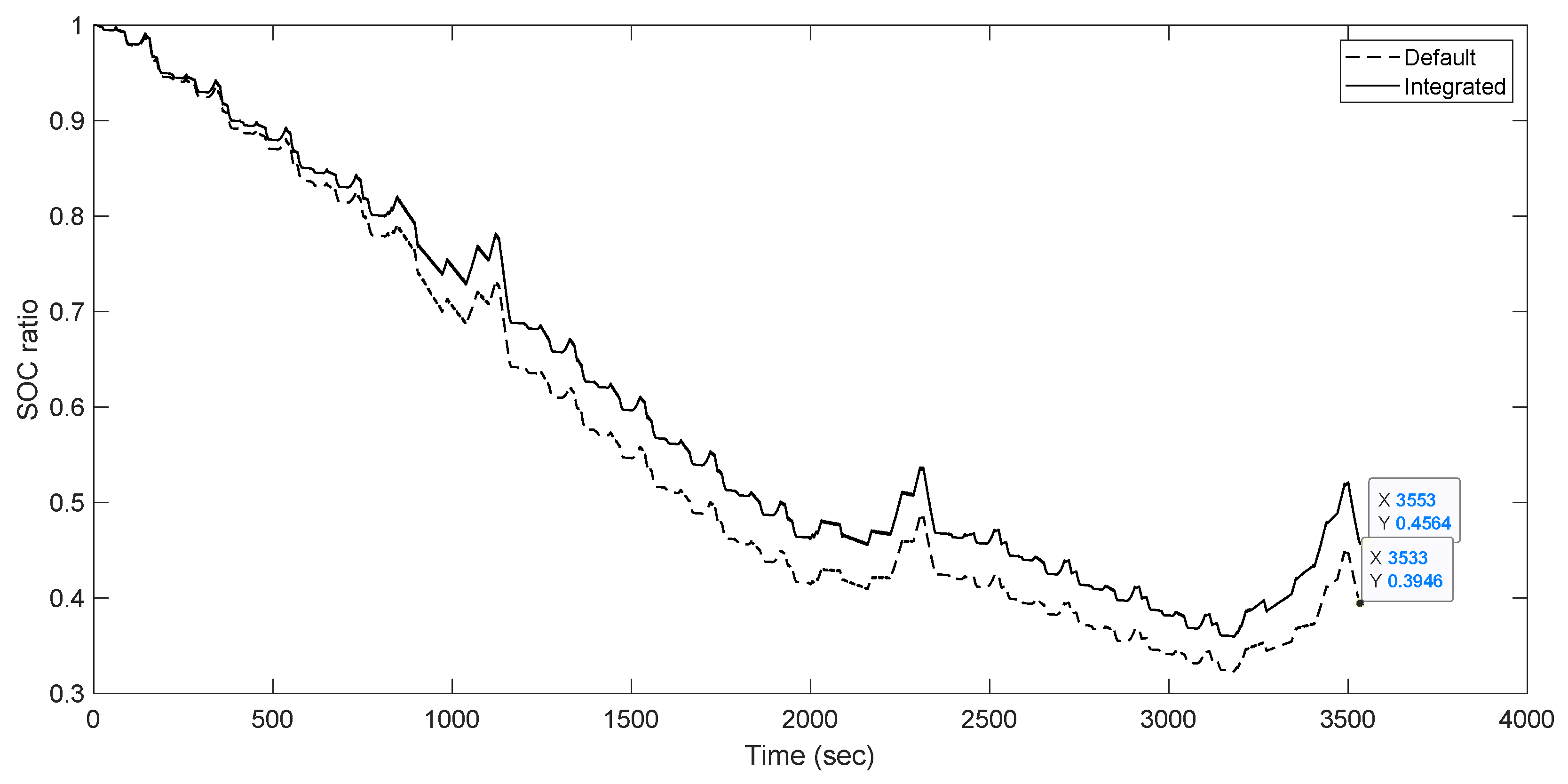
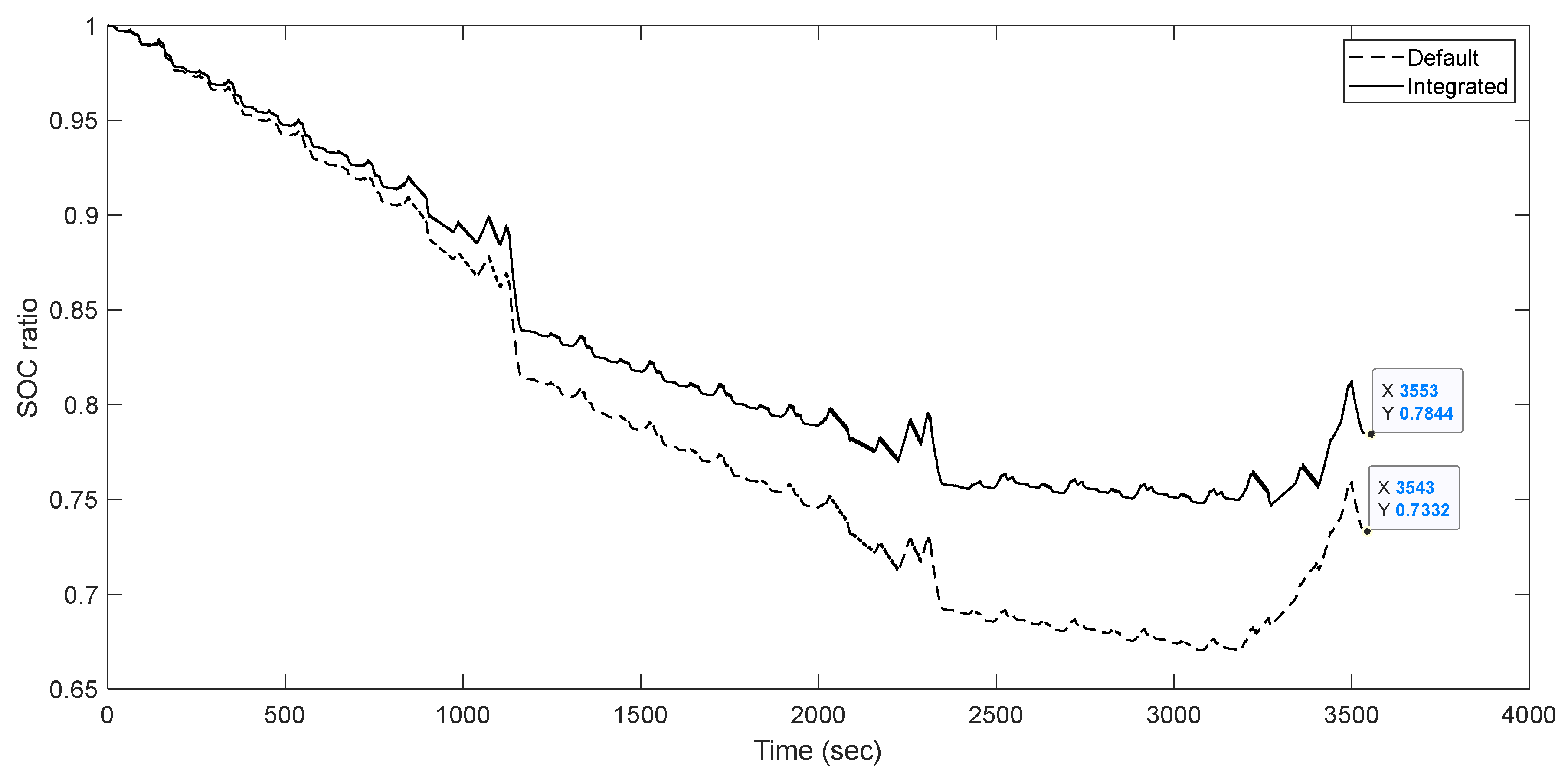
3.4. State of Charge
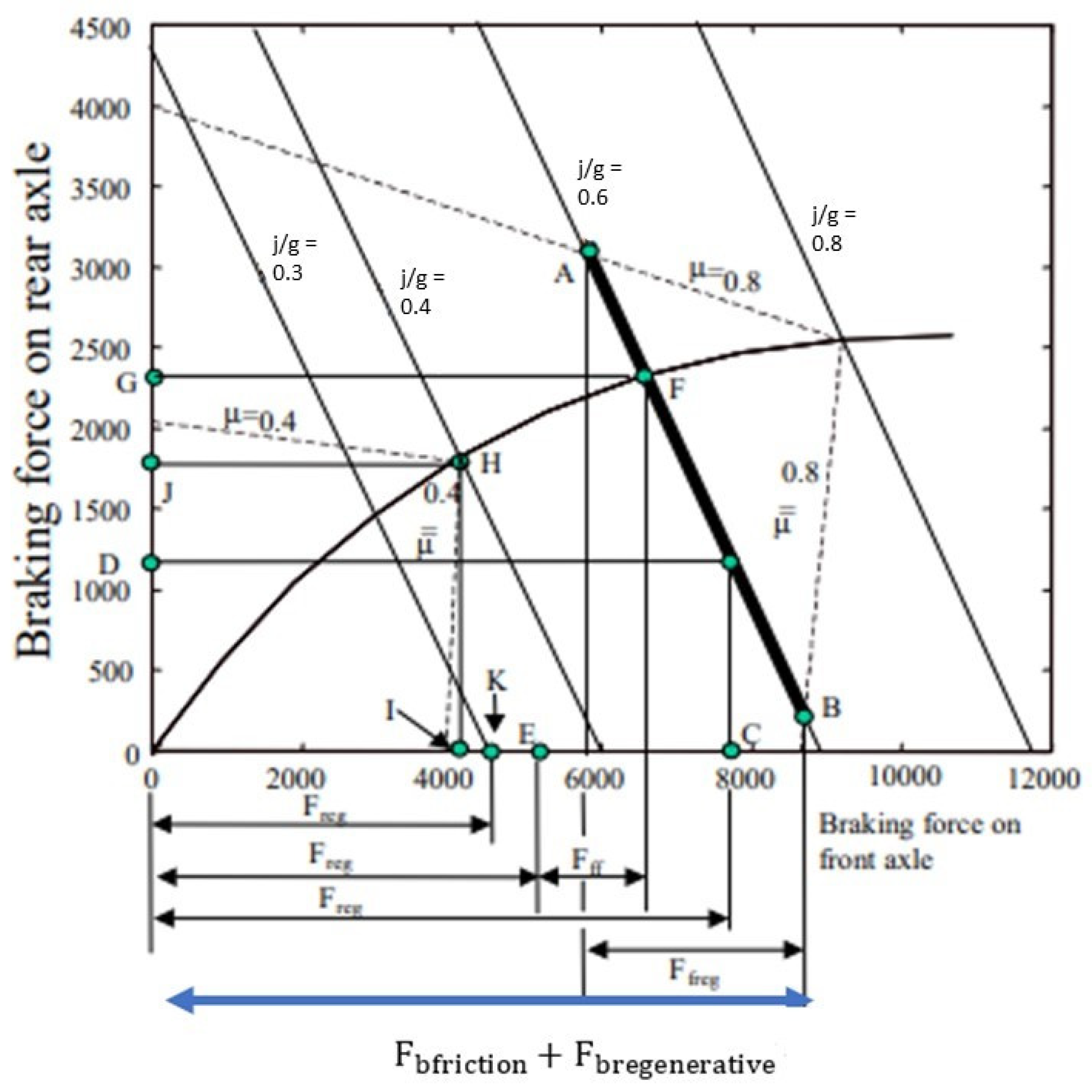
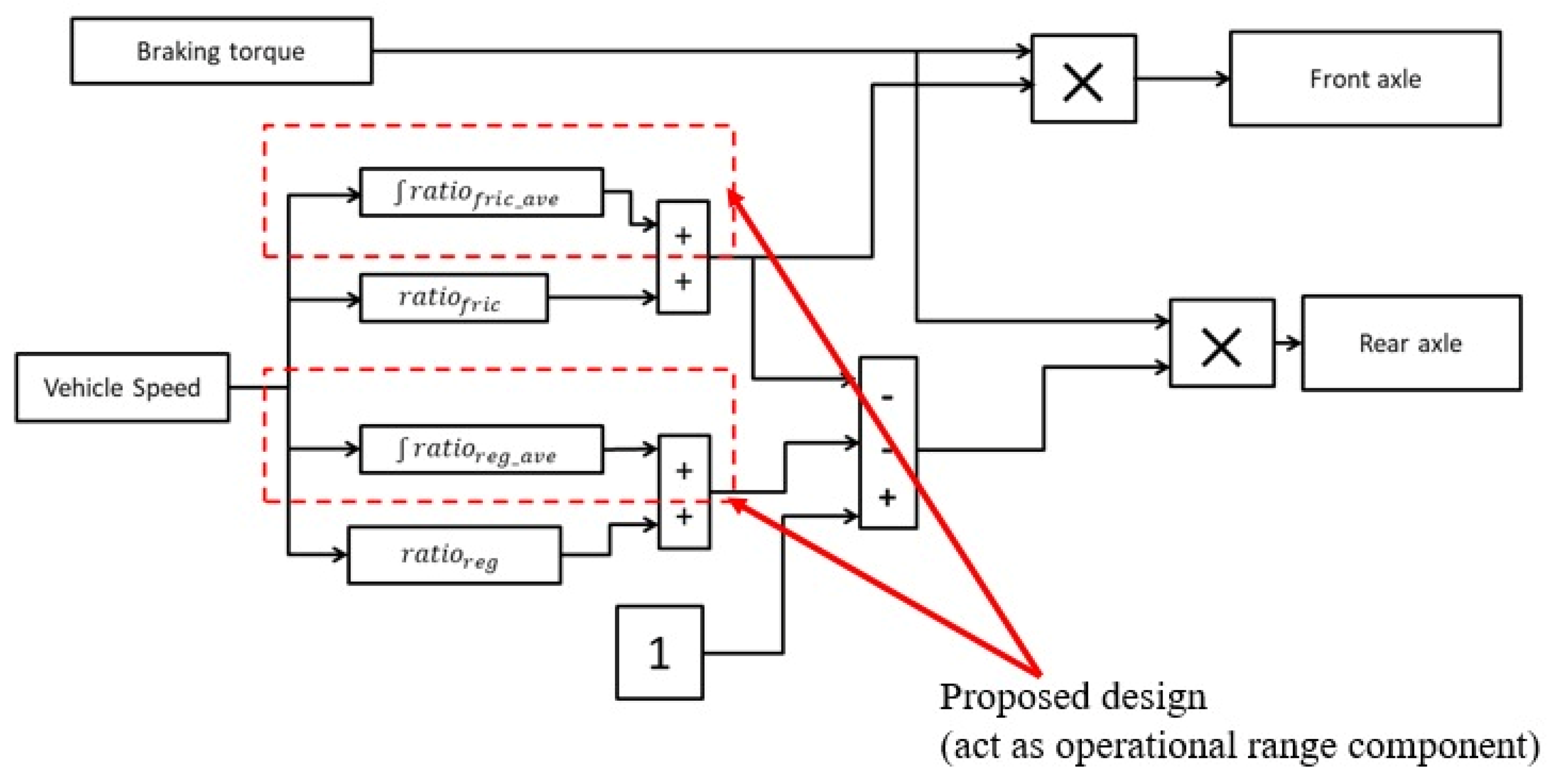
3.5. Braking Force Distribution
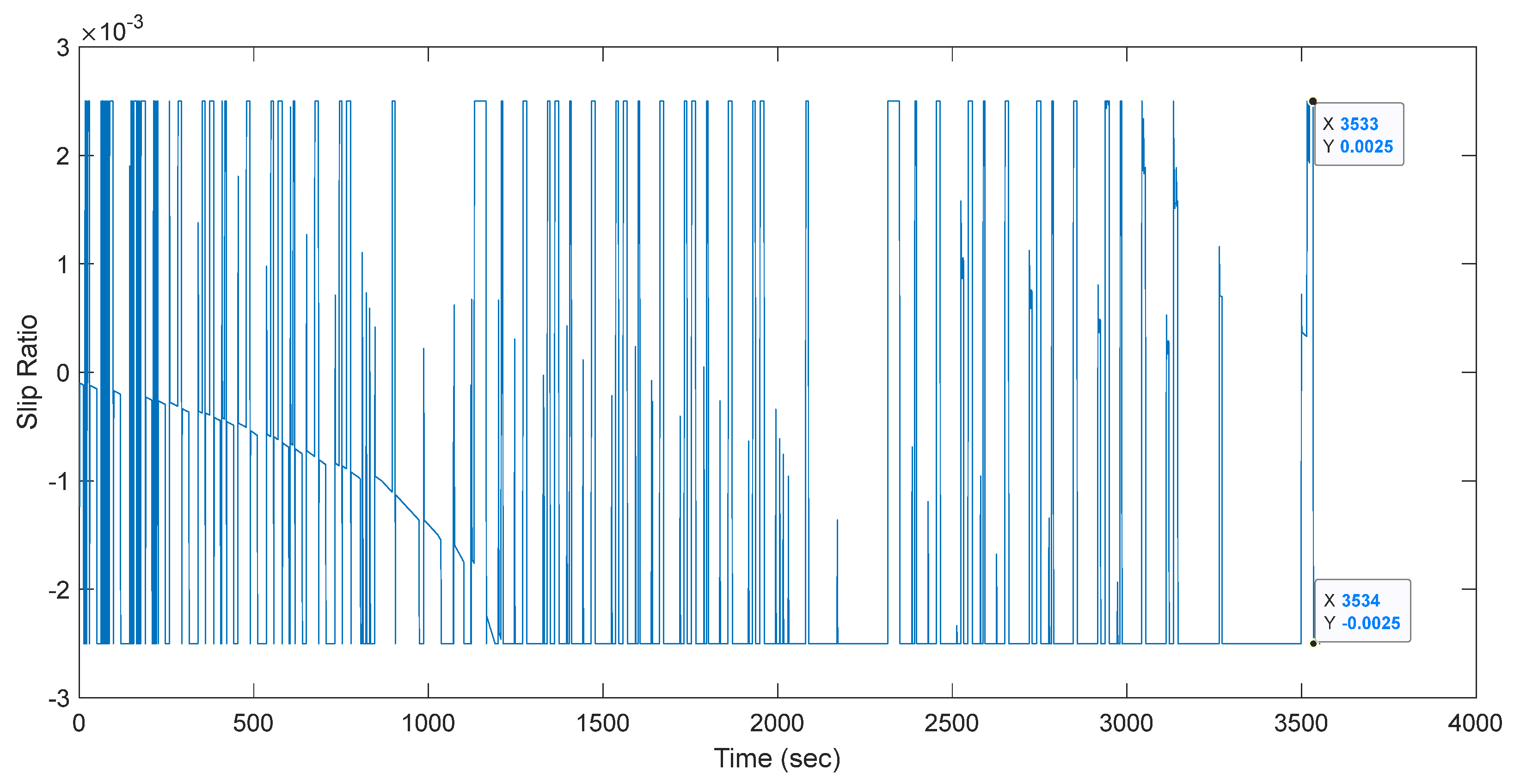
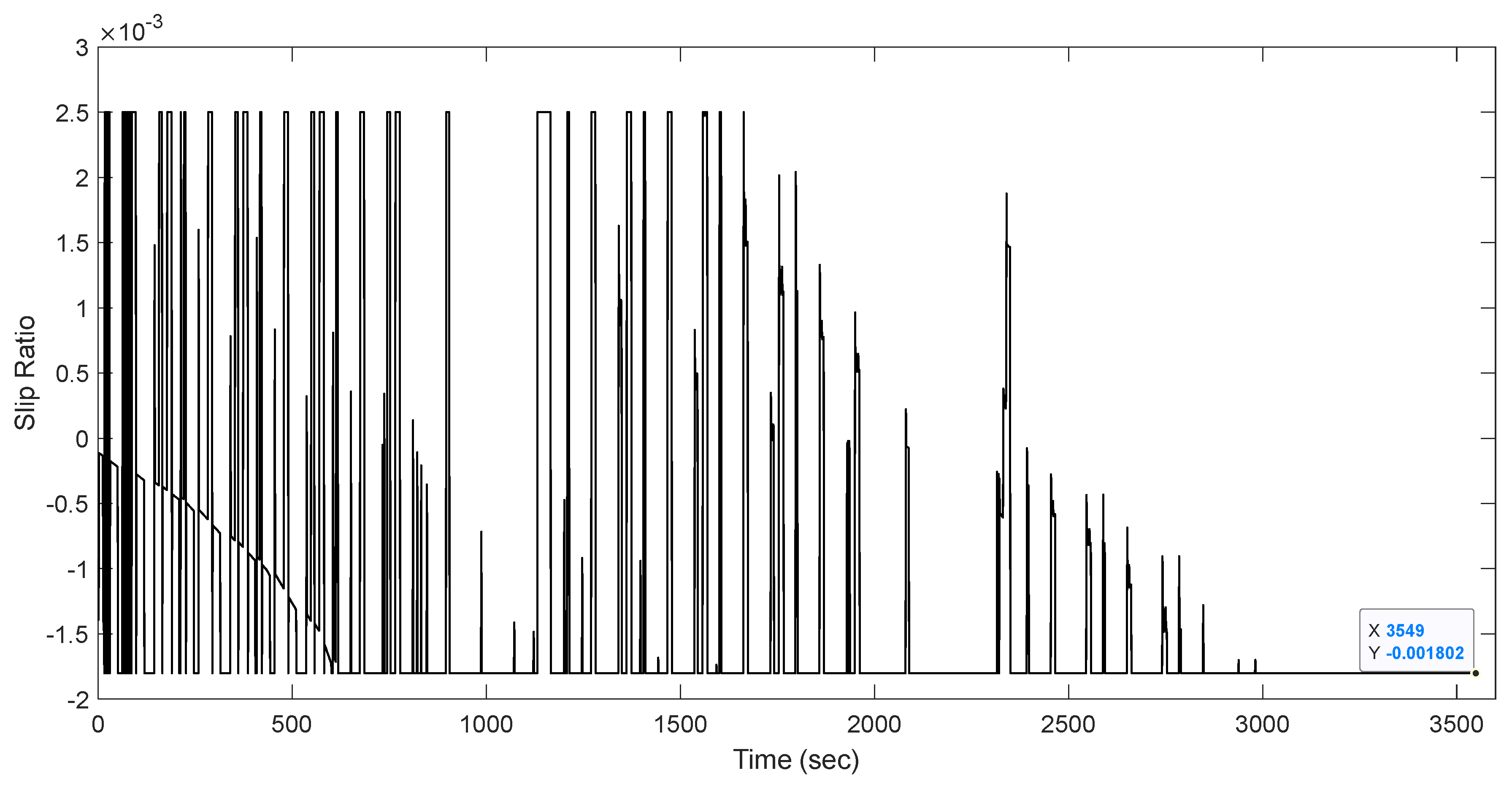
3.6. Slip Ratio
3.7. Sliding Mode Control
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kuntanapreeda, S. Traction control of electric vehicles using sliding-mode controller with tractive force observer. Int. J. Veh. Technol. 2014, 2014, 829097. [Google Scholar] [CrossRef]
- Fajri, P.; Lee, S.; Prabhala, V.A.K.; Ferdowsi, M. Modeling and Integration of Electric Vehicle Regenerative and Friction Braking for Motor/Dynamometer Test Bench Emulation. IEEE Trans. Veh. Technol. 2016, 65, 4264–4273. [Google Scholar] [CrossRef]
- Kumar, C.S.N.; Subramanian, S.C. Cooperative control of regenerative braking and friction braking for a hybrid electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2016, 230, 103–116. [Google Scholar] [CrossRef]
- Khorsravinia, K.; Hassan, M.K.; Rahman, R.Z.A.; Al-Haddad, S.A.R. Integrated OBD-II and mobile application for electric vehicle (EV) monitoring system. In Proceedings of the 2017 IEEE 2nd International Conference on Automatic Control and Intelligent System, Kota Kinabalu, Malaysia, 21 October 2017; Volume 2017, pp. 202–206. [Google Scholar] [CrossRef]
- Chen, J.; Liu, K.; Lan, F.; Liu, M. Braking Stability-Oriented Regenerative Braking Control Strategy of Twin Motor 4WD Electric Vehicle. DEStech Trans. Eng. Technol. Res. 2017, 2017, 58–65. [Google Scholar] [CrossRef] [PubMed]
- Lv, C.; Zhang, J.; Li, Y.; Yuan, Y. Regenerative Braking Control Algorithm for an Electrified Vehicle Equipped with a by-Wire brake System; SAE International: Warrendale, PA, USA, 2014; Volume 1. [Google Scholar] [CrossRef]
- Zheng, L.; Shi, Z.; Luo, Y.; Kang, J. A Study of Energy Recovery System during Braking for Electric Vehicle. In 2016 6th International Conference on Applied Science, Engineering and Technology; Atlantis Press: Amsterdam, The Netherlands, 2016; pp. 8–13. [Google Scholar] [CrossRef]
- Shewate, S.; Kumbhalkar, M.A.; Sonawane, Y.; Salunkhe, T.; Savant, S. Modelling And Simulation of Regenerative Braking System for Light Commercial Vehicle—A Review. IOSR J. Mech. Civ. Eng. 2018, 8, 52–56. [Google Scholar]
- Bai, Z.F.; Li, S.X.; Cao, B.G. H∞ Control Applied to Electric Torque Control for Regenerative Braking of an Electric Vehicle. J. Appl. Sci. 2005, 5, 1103–1107. [Google Scholar] [CrossRef]
- Palanivel, P.; Alemayehu, H.; Chandramouli, B.; Hiremath, R. Design and Analysis of BLDC Motor Drive Based on Fuzzy-PID Controller. Int. J. Electr. Eng. Technol. 2020, 11, 281–290. [Google Scholar] [CrossRef]
- Zhang, H.; Xu, G.; Li, W.; Zhou, M. Fuzzy logic control in regenerative braking system for electric vehicle. In Proceedings of the 2012 IEEE International Conference on Information and Automation, Shenyang, China, 6–8 June 2012; pp. 588–591. [Google Scholar] [CrossRef]
- Mei, P.; Yang, S.; Xu, B.; Sun, K. A Fuzzy Sliding-Mode Control for Regenerative Braking System of Electric Vehicle. In Proceedings of the 2021 7th International Conference on Control, Automation and Robotics (ICCAR), Singapore, 23–26 April 2021; pp. 397–401. [Google Scholar] [CrossRef]
- Canciello, G.; Russo, A.; Guida, B.; Cavallo, A. Supervisory Control for Energy Storage System Onboard Aircraft. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Palermo, Italy, 12–15 June 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Cavallo, A.; Canciello, G.; Russo, A. Supervised Energy Management in Advanced Aircraft Applications. In Proceedings of the 2018 European Control Conference (ECC), Limassol, Cyprus, 12–15 June 2018; pp. 2769–2774. [Google Scholar] [CrossRef]
- Chu, S.; Xie, Z.; Wong, P.K.; Li, P.; Li, W.; Zhao, J. Observer-based gain scheduling path following control for autonomous electric vehicles subject to time delay. Veh. Syst. Dyn. 2022, 60, 1602–1626. [Google Scholar] [CrossRef]
- Allagui, N.Y.; Salem, F.A.; Aljuaid, A.M. Artificial Fuzzy-PID Gain Scheduling Algorithm Design for Motion Control in Differential Drive Mobile Robotic Platforms. Comput. Intell. Neurosci. 2021, 2021, 5542888. [Google Scholar] [CrossRef]
- Mehrdad, E.; Yimin, G.; Sebastian, E.G.; Ali, E. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles; CRC Press: Boca Raton, FL, USA, 2005. [Google Scholar]
- Nam, K.; Hori, Y.; Lee, C. Wheel slip control for improving traction-ability and energy efficiency of a personal electric vehicle. Energies 2015, 8, 6820–6840. [Google Scholar] [CrossRef]
- Eckert, J.J.; Silva, L.C.A.; Costa, E.S.; Santiciolli, F.M.; Dedini, F.G.; Corrêa, F.C. Electric vehicle drivetrain optimisation. IET Electr. Syst. Transp. 2017, 7, 32–40. [Google Scholar] [CrossRef]
- Yamsani, A. Gradeability for Automobiles. IOSR J. Mech. Civ. Eng. 2014, 11, 35–41. [Google Scholar] [CrossRef]
- Niksa, Ć.; Damir, V.; Vraži, M. Overall Efficiency in Electric Road Vehicles. Safety Eng. 2011, 8, 51–56. [Google Scholar] [CrossRef]
- Josef, B.; Zvolský, T. Experimental study of electric vehicle gearbox efficiency. In MATEC Web of Conferences; EDP Sciences: Les Ulis, France, 2018; Volume 4, p. 02004. [Google Scholar]
- Rajendran, S.; Spurgeon, S.; Tsampardoukas, G.; Hampson, R. Intelligent Sliding Mode Scheme for Regenerative Braking Control. IFAC PapersOnLine 2018, 51, 334–339. [Google Scholar] [CrossRef]
- Zhang, Z.; Xu, G.; Li, W.; Zheng, L. Regenerative Braking for Electric Vehicle based on Fuzzy Logic Control Strategy. In Proceedings of the 2010 2nd International Conference on Mechanical and Electronics Engineering, Kyoto, Japan, 1–3 August 2010; Volume 1, pp. 319–323. [Google Scholar] [CrossRef]
- Anowar, M.H.; Roy, P. A Modified Incremental Conductance Based Photovoltaic MPPT Charge Controller. In Proceedings of the 2019 International Conference on Electrical, Computer and Communication Engineering (ECCE), Cox’sBazar, Bangladesh, 7–9 February 2019. [Google Scholar] [CrossRef]
- Vyroubal, P.; Maxa, J.; Kazda, T. Simulation of the behavior of the lithium ion battery. Adv. Mil. Technol. 2014, 9, 107–115. [Google Scholar]
- Gao, Y.; Chen, L.; Ehsani, M. Investigation of the Effectiveness of Regenerative Braking for EV and HEV. SAE Trans. 2018, 108, 3184–3190. [Google Scholar]
- Sangtarash, F.; Esfahanian, V.; Nehzati, H.; Haddadi, S.; Bavanpour, M.A.; Haghpanah, B. Effect of Different Regenerative Braking Strategies on Braking Performance and Fuel Economy in a Hybrid Electric Bus Employing CRUISE Vehicle Simulation. SAE Int. J. Fuels Lubr. 2009, 1, 828–837. [Google Scholar] [CrossRef]
- Guo, J.; Wang, J.; Cao, B. Regenerative braking strategy for electric vehicles. In Proceedings of the 2009 IEEE Intelligent Vehicles Symposium, Xi’an, China, 3–5 June 2009; pp. 864–868. [Google Scholar] [CrossRef]
- Zhao, X. Braking torque distribution for hybrid electric vehicles based on nonlinear disturbance observer. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 233, 3327–3341. [Google Scholar] [CrossRef]
- Xu, G.; Xu, K.; Zheng, C.; Zhang, X.; Zahid, T. Fully Electrified Regenerative Braking Control for Deep Energy Recovery and Maintaining Safety of Electric Vehicles. IEEE Trans. Veh. Technol. 2016, 65, 1186–1198. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, J.; Li, C.; He, C. Sliding Mode Control Algorithm for Regenerative Braking of an Electric Bus with a Pneumatic Anti-lock Braking System. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019. [Google Scholar] [CrossRef]
- Zheng, Y.; Liu, J.; Liu, X.; Fang, D.; Wu, L. Adaptive Second-Order Sliding Mode Control Design for a Class of Nonlinear Systems with Unknown Input. Math. Probl. Eng. 2015, 2015, 319495. [Google Scholar] [CrossRef]
- Heng, C.T.; Jamaludin, Z.; Hashim, A.Y.B.; Rafan, N.A.; Abdullah, L.; Salleh, M.R.; Arep, H. Desing and Analysis of Super Twisting Sliding Mode Control for Machine Tools. J. Teknol. 2016, 3, 25–29. [Google Scholar]
- Kruse, O.; Mukhamejanova, A.; Mercorelli, P. Super-Twisting Sliding Mode Control for Differential Steering Systems in Vehicular Yaw Tracking Motion. Electronics 2022, 11, 1330. [Google Scholar] [CrossRef]
- Fallaha, C.J.; Saad, M.; Kanaan, H.Y.; Al-Haddad, K. Sliding-mode robot control with exponential reaching law. IEEE Trans. Ind. Electron. 2011, 58, 600–610. [Google Scholar] [CrossRef]
- Ghazali, A.K.; Hassan, M.K.; Radzi, M.A.M.; As’arry, A. Electric vehicle with sliding mode control super-twisting control strategy. J. Phys. Conf. Ser. 2020, 1432, 012023. [Google Scholar] [CrossRef]
- Alkharasani, B.A.; Hassan, M.K.; Akmeliawati, R.; Zafira, R.; Ahmed, S.A. PID-sliding surface based sliding mode controller for anti-lock braking system of electric vehicle. Adv. Sci. Lett. 2016, 22, 2734–2737. [Google Scholar] [CrossRef]
- Ghazali, A.K.; Hassan, M.K.; Radzi, M.A.M.; As’arry, A. Integrated braking force distribution for electric vehicle regenerative braking system. Pertanika J. Sci. Technol. 2020, 28, 173–182. [Google Scholar] [CrossRef]
- Ghazali, A.K.; Hassan, M.K.; Mohd Radzi, M.A.; As’arry, A. Sliding mode control optimization method using fuzzy-gain scheduling for rgenerative braking system. J. Adv. Res. Dyn. Control Syst. 2020, 12, 1504–1509. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Distance | 10.93 km |
| Maximum speed | 120 km/h |
| Average speed | 33.21 km/h |
| Maximum acceleration | 1.06 m/s2 |
| Maximum deceleration | −1.39 m/s2 |
| Number of stops | 13 |
| Parameters | Default | Integrated | Improvement |
|---|---|---|---|
| Overall efficiency | 0.433 | 0.433 | - |
| Motor efficiency | 0.8 | 0.8 | - |
| Distance (km) | 32.8 | 32.8 | - |
| Energy transmitted (kJ) | 4573 | 5069 | 10.8% |
| Energy loss during driving (kJ) | 2550 | 2535 | 15 kJ |
| Parameters | Default | Integrated | Improvement |
|---|---|---|---|
| Overall efficiency | 0.485 | 0.546 | 12.58% |
| Motor efficiency | 0.83 | 0.83 | - |
| Distance (km) | 33 | 33 | - |
| Energy transmitted (kJ) | 119 × 105 | 121 × 105 | 1.68% |
| Energy loss during driving (kJ) | 72,813 | 66,207 | 6606 kJ |
| Parameters | Default | Integrated | Improvement |
|---|---|---|---|
| Overall efficiency | 0.74 | 0.83 | 12.16% |
| Motor efficiency | 0.86 | 0.86 | - |
| Distance (km) | 32.6 | 32.6 | - |
| Energy transmitted (kJ) | 4977 | 5687 | 14.27% |
| Energy loss during driving (kJ) | 2770 | 2857 | 87 kJ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghazali, A.K.; Hassan, M.K.; Radzi, M.A.M.; As’arry, A. Optimizing Energy Harvesting: A Gain-Scheduled Braking System for Electric Vehicles with Enhanced State of Charge and Efficiency. Energies 2023, 16, 4561. https://doi.org/10.3390/en16124561
Ghazali AK, Hassan MK, Radzi MAM, As’arry A. Optimizing Energy Harvesting: A Gain-Scheduled Braking System for Electric Vehicles with Enhanced State of Charge and Efficiency. Energies. 2023; 16(12):4561. https://doi.org/10.3390/en16124561
Chicago/Turabian StyleGhazali, Anith Khairunnisa, Mohd Khair Hassan, Mohd Amran Mohd Radzi, and Azizan As’arry. 2023. "Optimizing Energy Harvesting: A Gain-Scheduled Braking System for Electric Vehicles with Enhanced State of Charge and Efficiency" Energies 16, no. 12: 4561. https://doi.org/10.3390/en16124561
APA StyleGhazali, A. K., Hassan, M. K., Radzi, M. A. M., & As’arry, A. (2023). Optimizing Energy Harvesting: A Gain-Scheduled Braking System for Electric Vehicles with Enhanced State of Charge and Efficiency. Energies, 16(12), 4561. https://doi.org/10.3390/en16124561