
Numerical Investigation into a New Method of Non-Axisymmetric End Wall Contouring for Axial Compressors


Abstract
:
1. Introduction
- The number of controlling parameters is limited to an appropriate level, making the method easy to use. The parameters have a clear and intuitive influence on the end wall geometry and the intent of flow control.
- The design space is large enough to accommodate suitable aerodynamic end wall shapes for a wide range of compressor scenarios.
- The new method can take into account the need for control of multiple local secondary flows for corner separation while facilitating the integration of prior experience of effective flow control.
2. Parametric Design of Non-Axisymmetric End Wall Contouring
2.1. The Definition of the End Wall Contouring Units
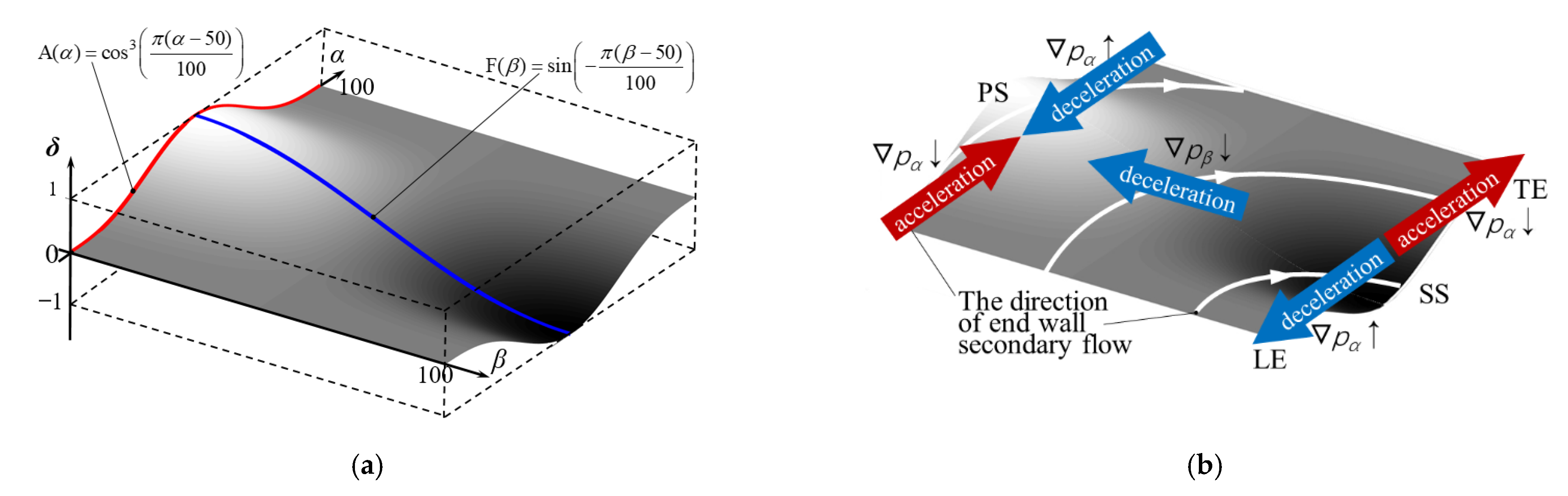
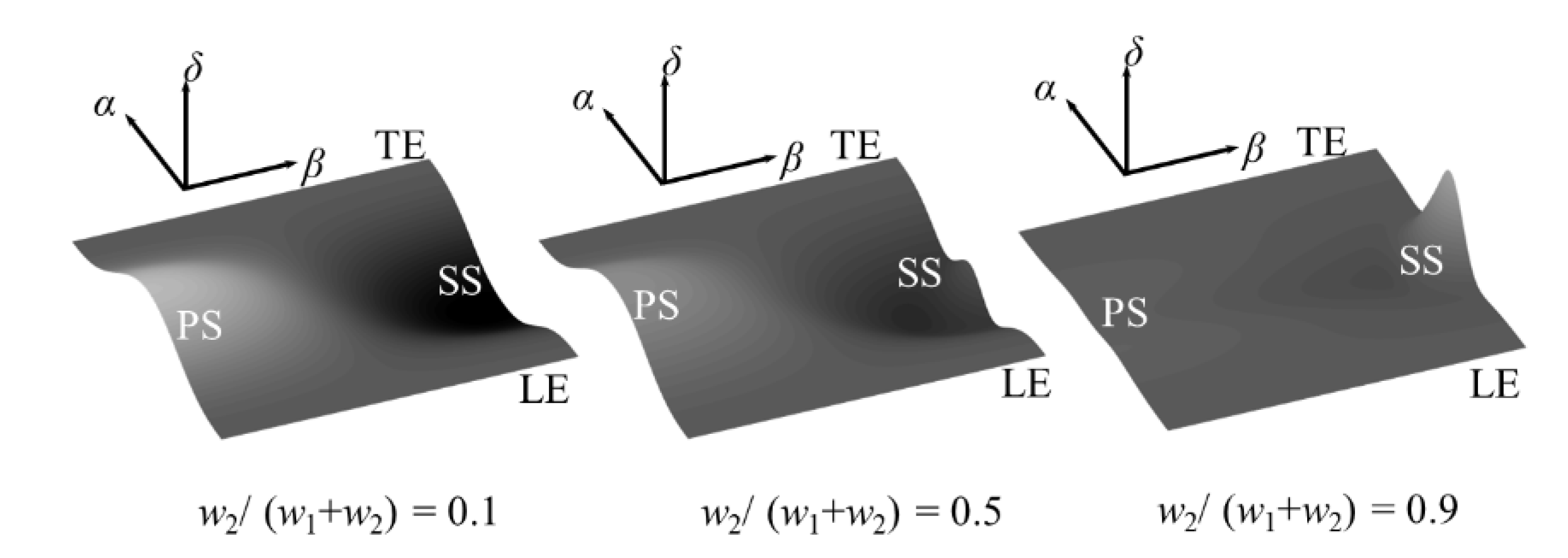
2.1.1. The Continuous Unit
2.1.2. The Localized Unit
2.2. Generating Non-Axisymmetric End Wall Contouring in the Standard Space
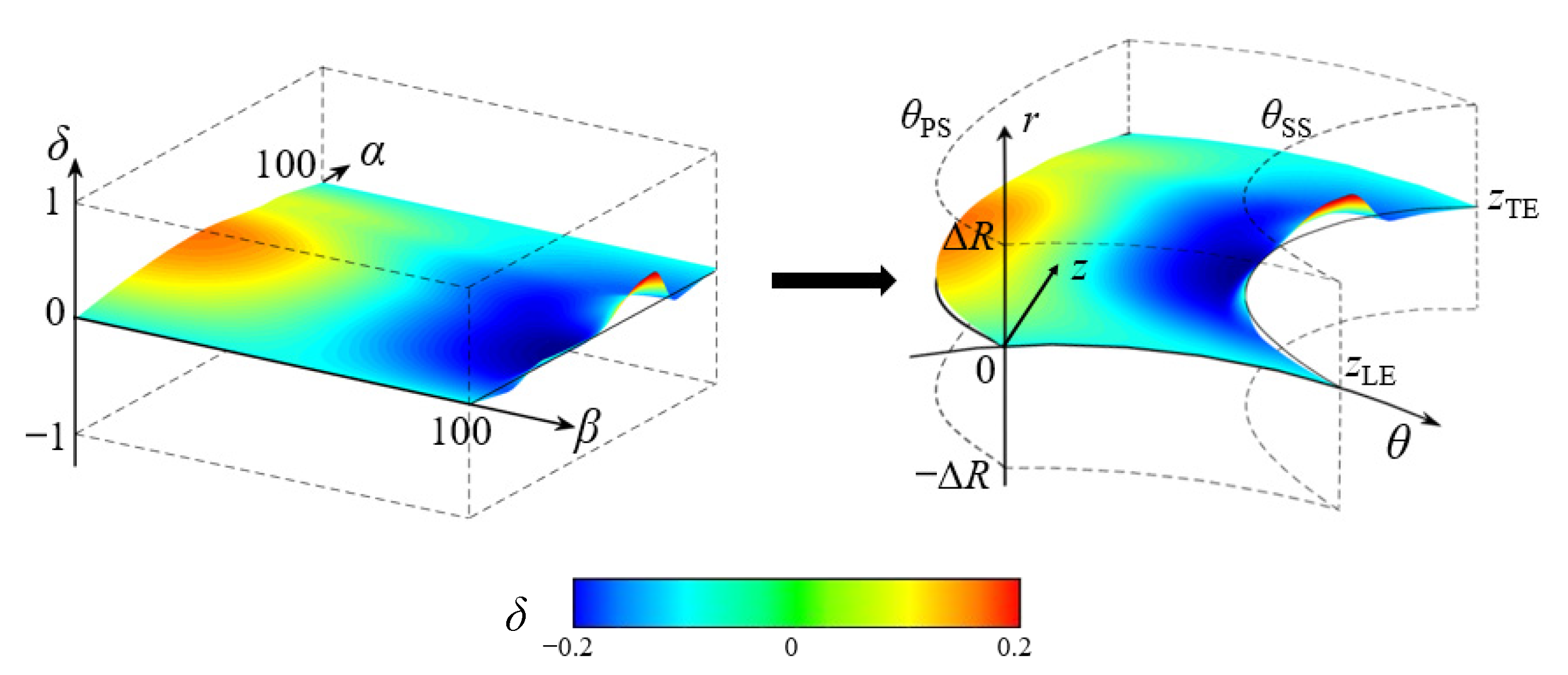
2.3. Generating NEWC for the Actual Compressor
3. The Baseline Compressor Cascade and CFD Method
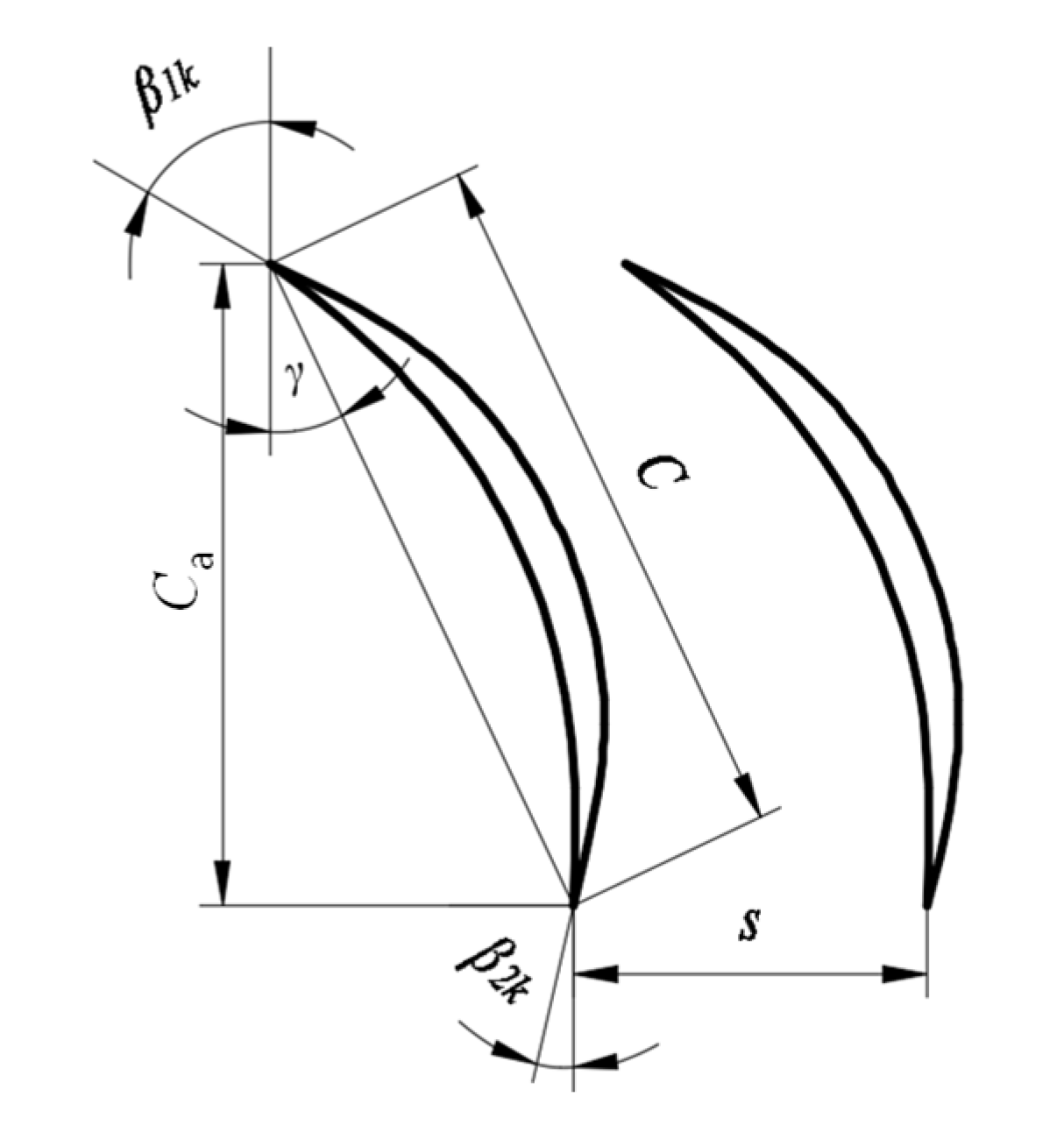
3.1. The Baseline Compressor Cascade and the Experimental Test Rig
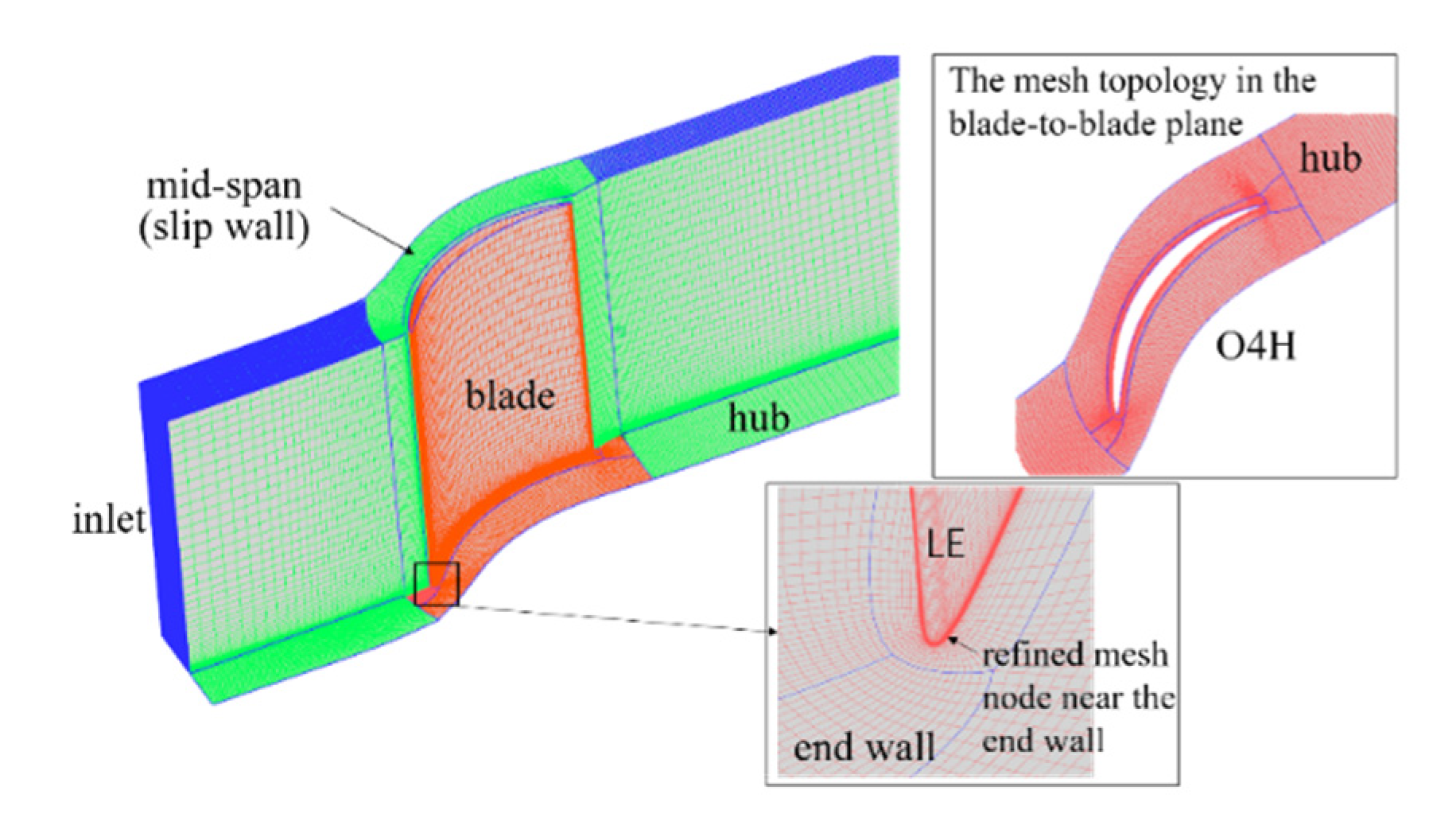
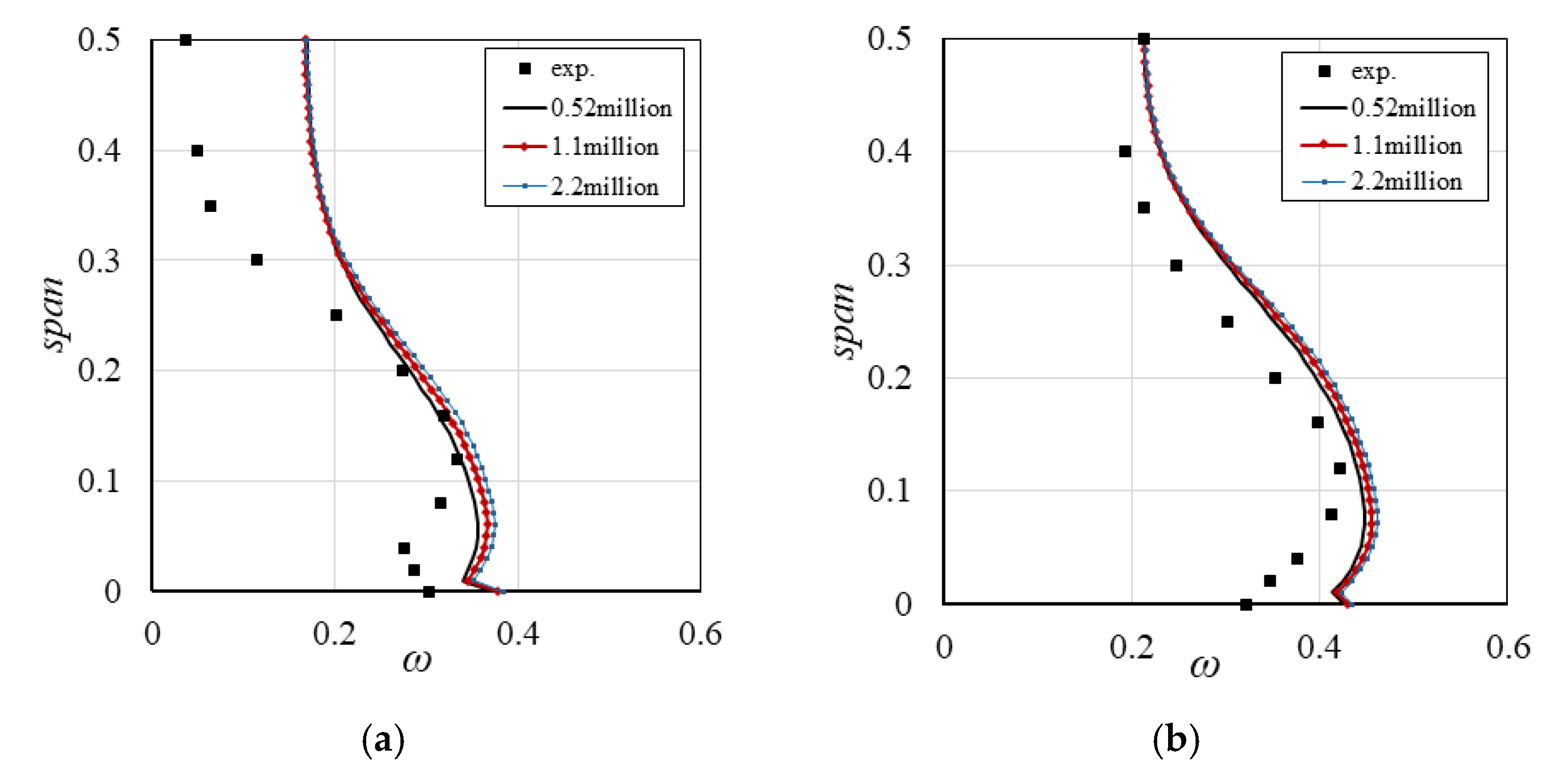
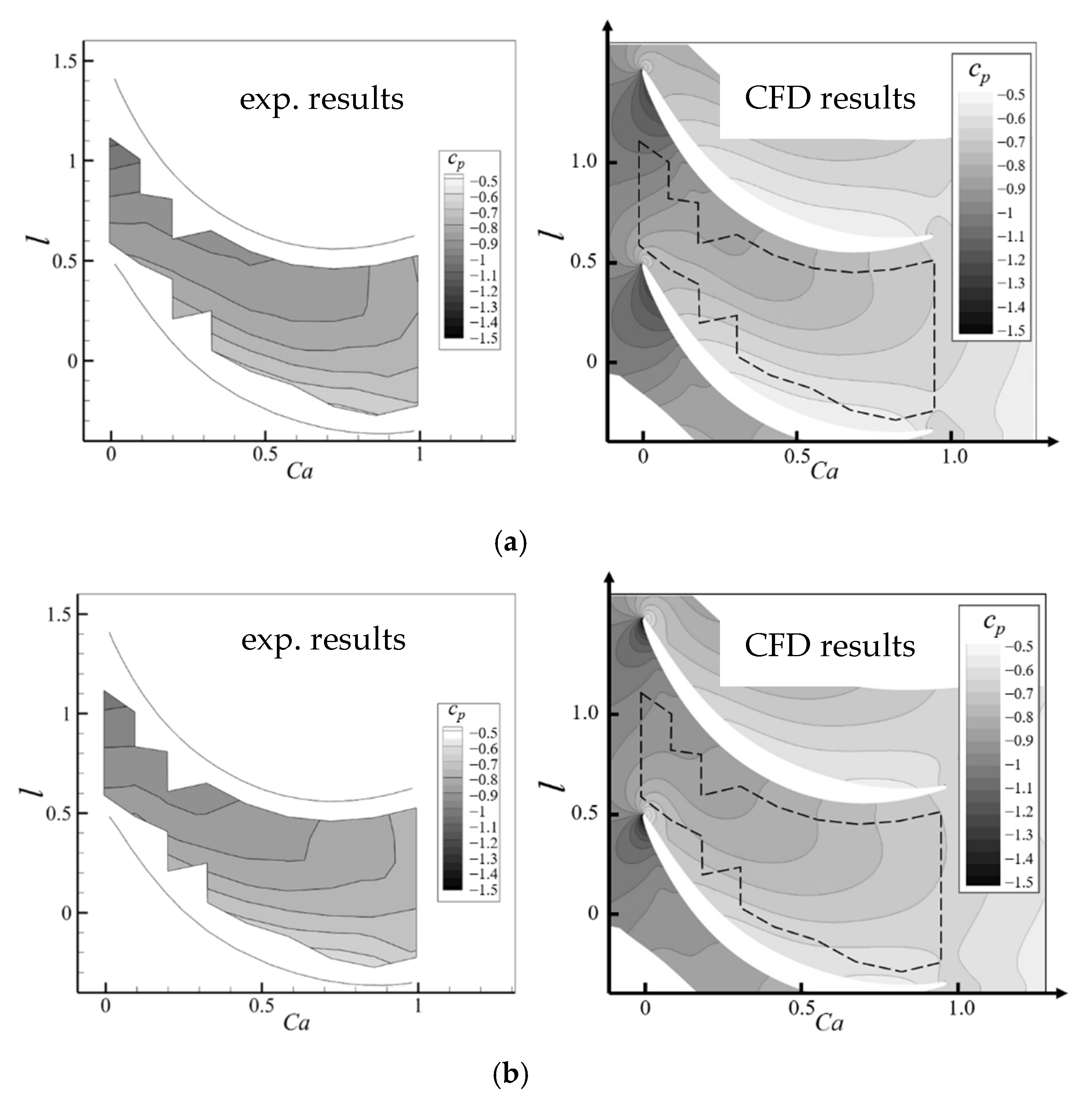
3.2. The CFD Method and Validation
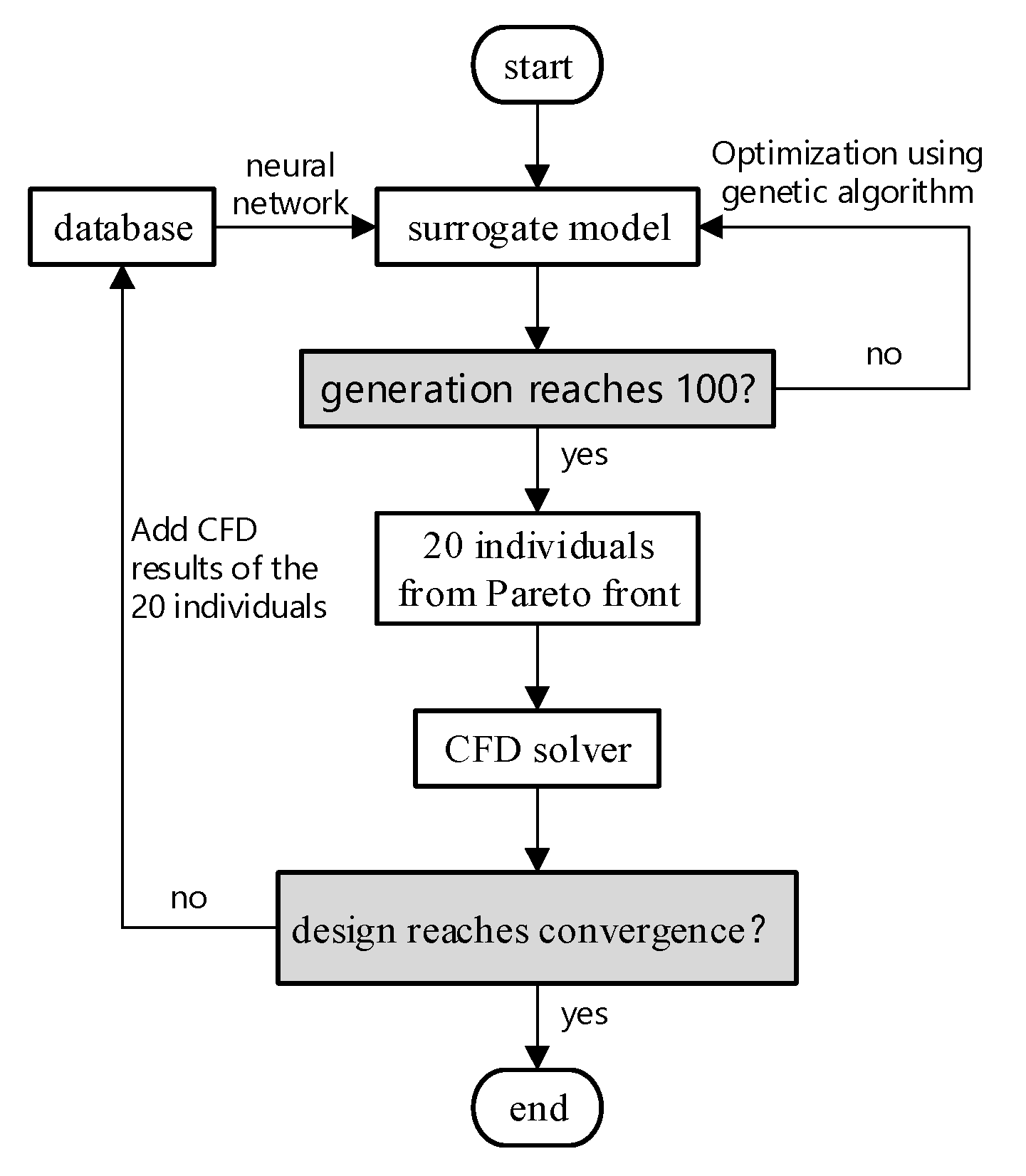
4. Optimization Method
5. Results and Discussion
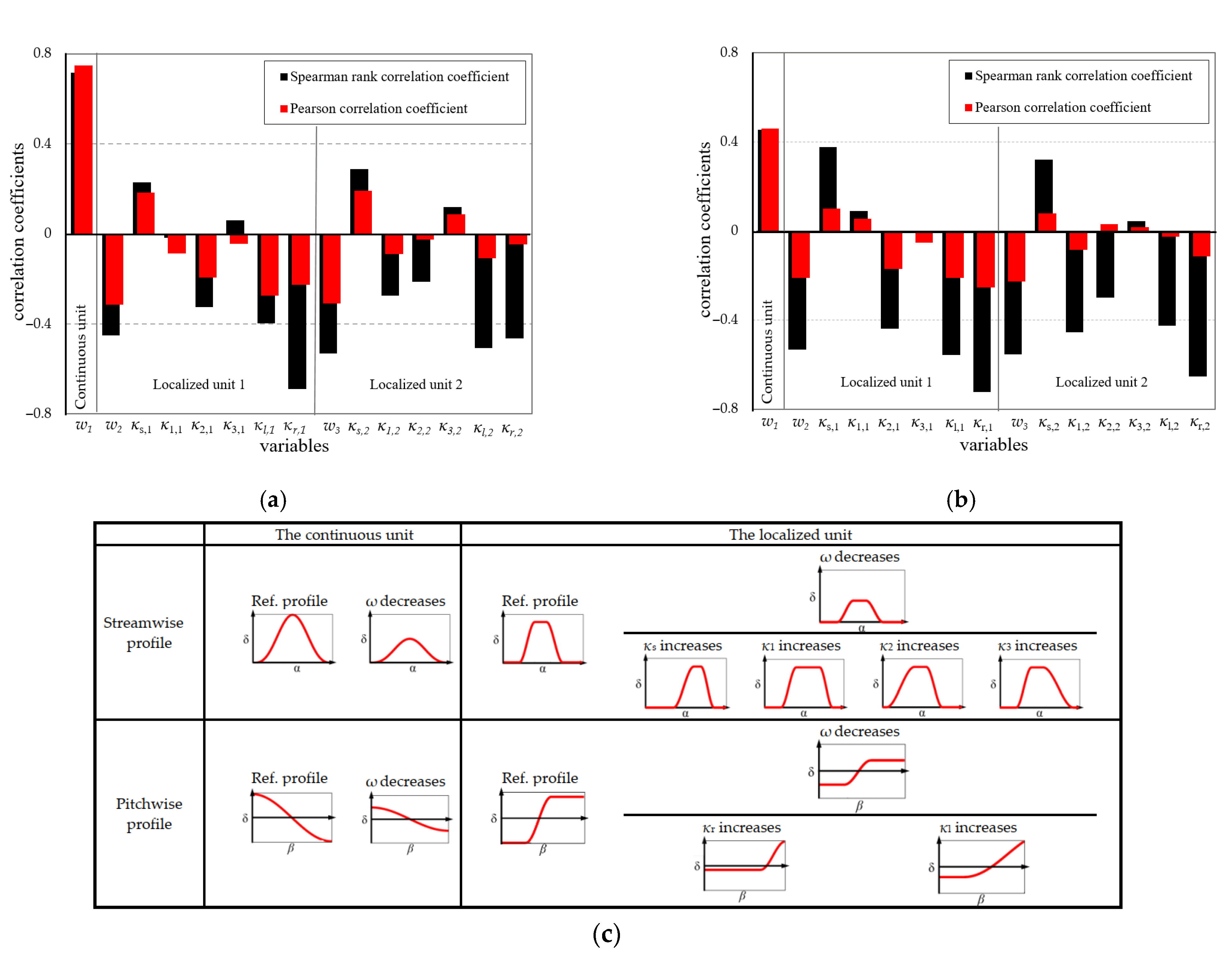
5.1. Correlation Analysis of Control Variables and Losses
- The correlation between the control variables of the localized units and the overall loss was nonlinear. The control variables of the localized units were found to be strongly interrelated with each other when suppressing the corner separation and reducing losses.
- The most effective end wall contouring in separation control required the continuous unit to generate a convex end wall near the SS and a concave end wall near the PS. For the localized units, a convex end wall near the SS extending to LE and TE, with a gentle slope toward the LE, tended to minimize the overall loss.
- The contouring rules under different working conditions were similar. In the operating point of high incidence, the control of corner separation was more closely associated with the localized control of secondary flow near the SS.
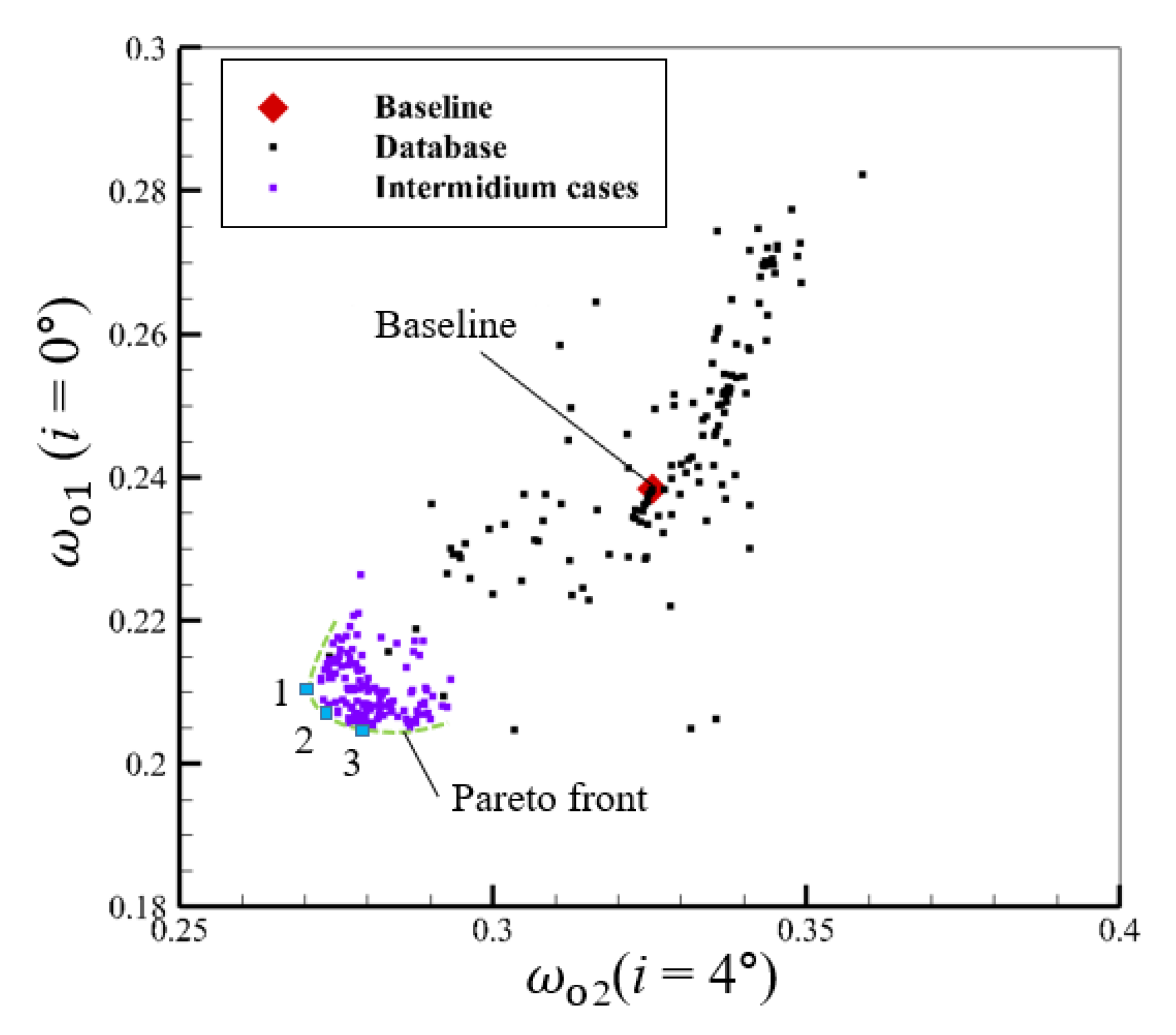
5.2. Analysis of Optimization Results and Overall Performance
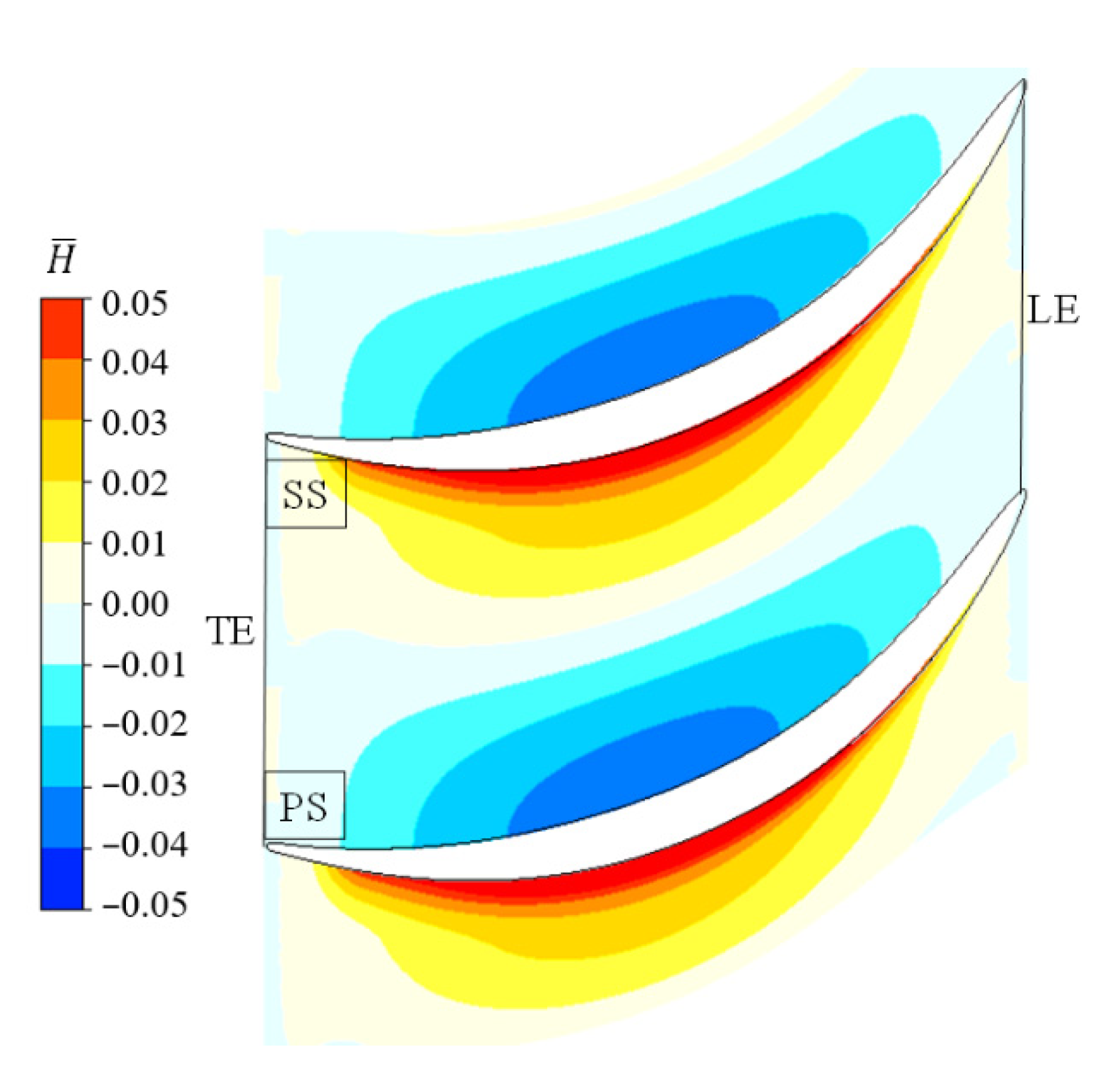
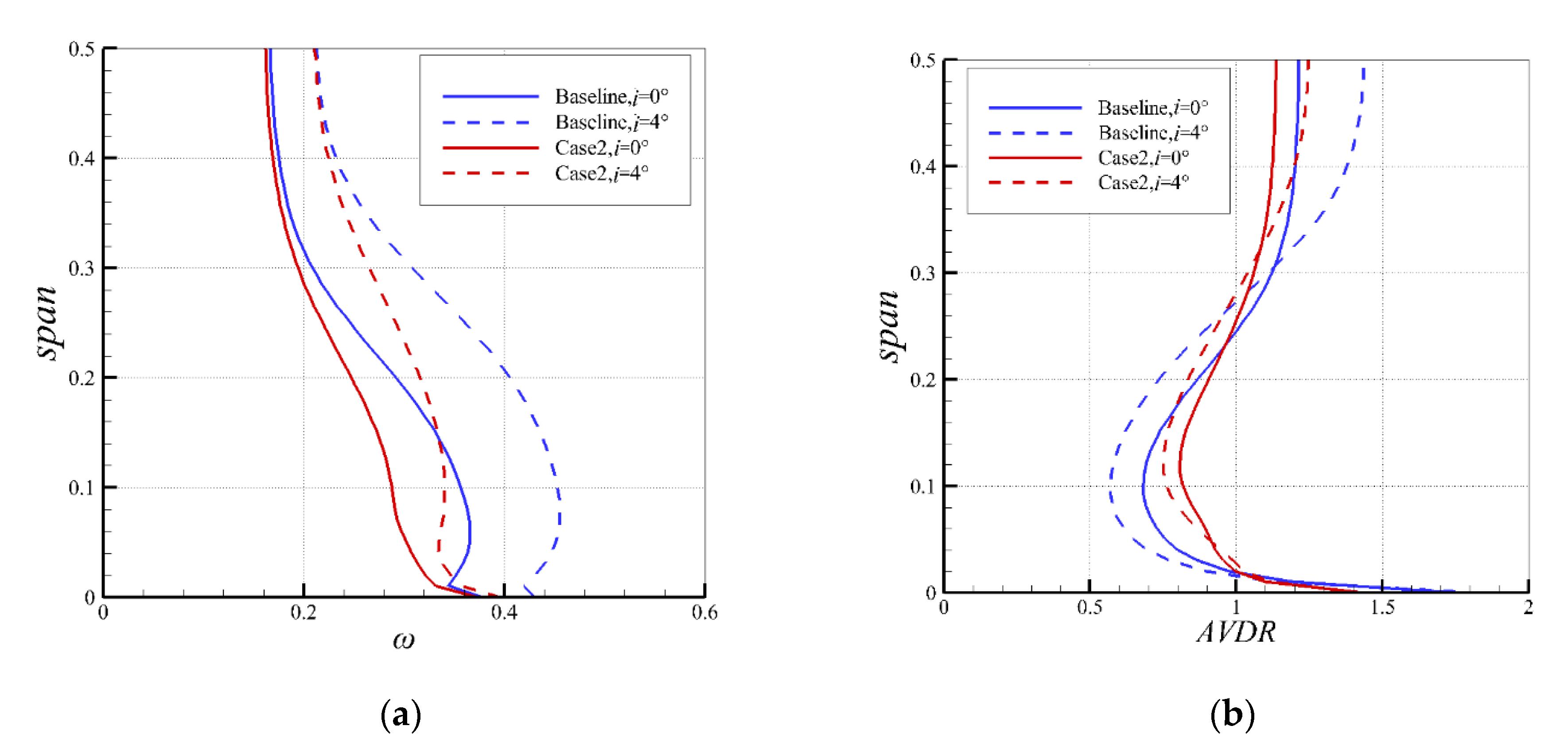
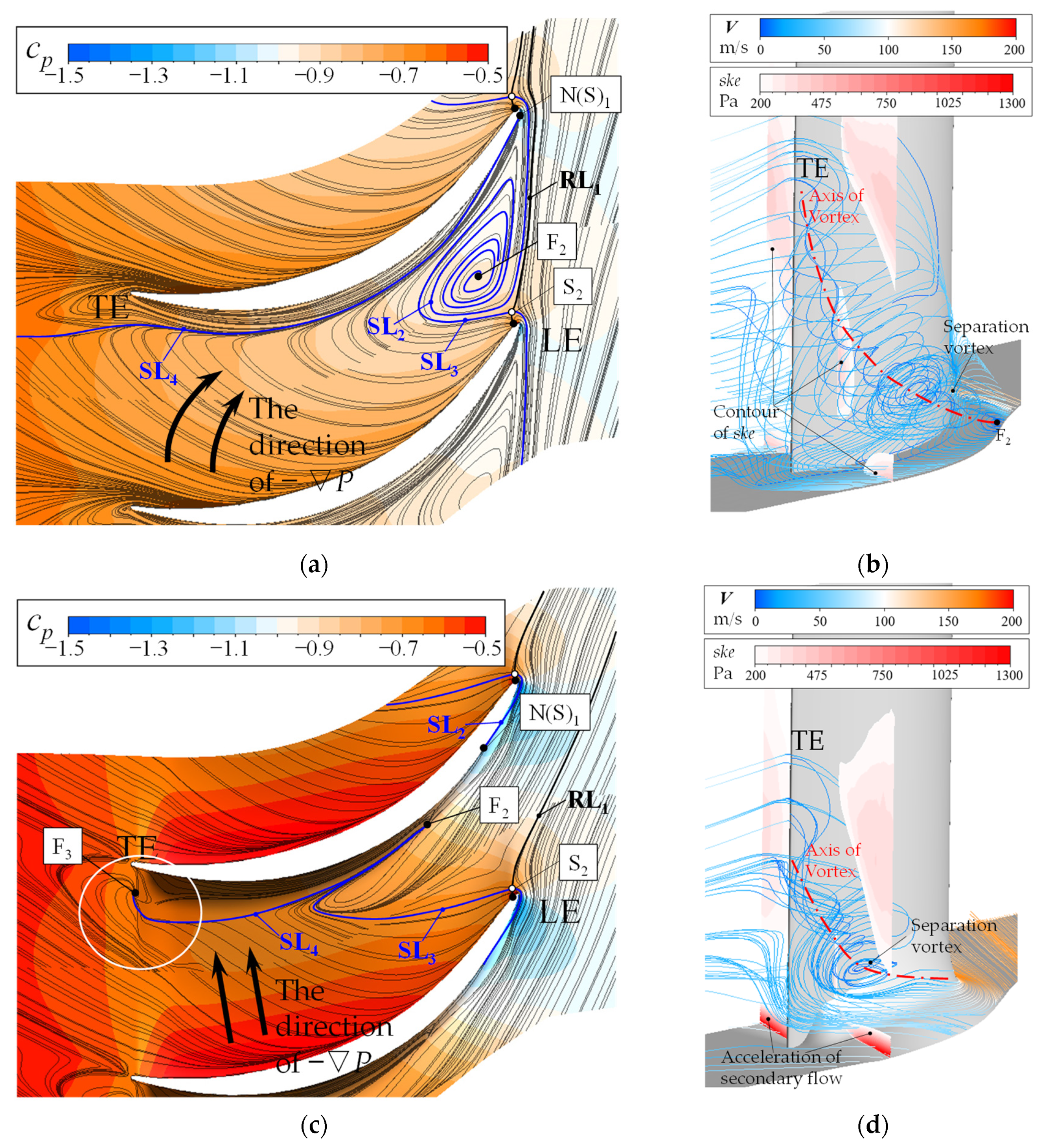
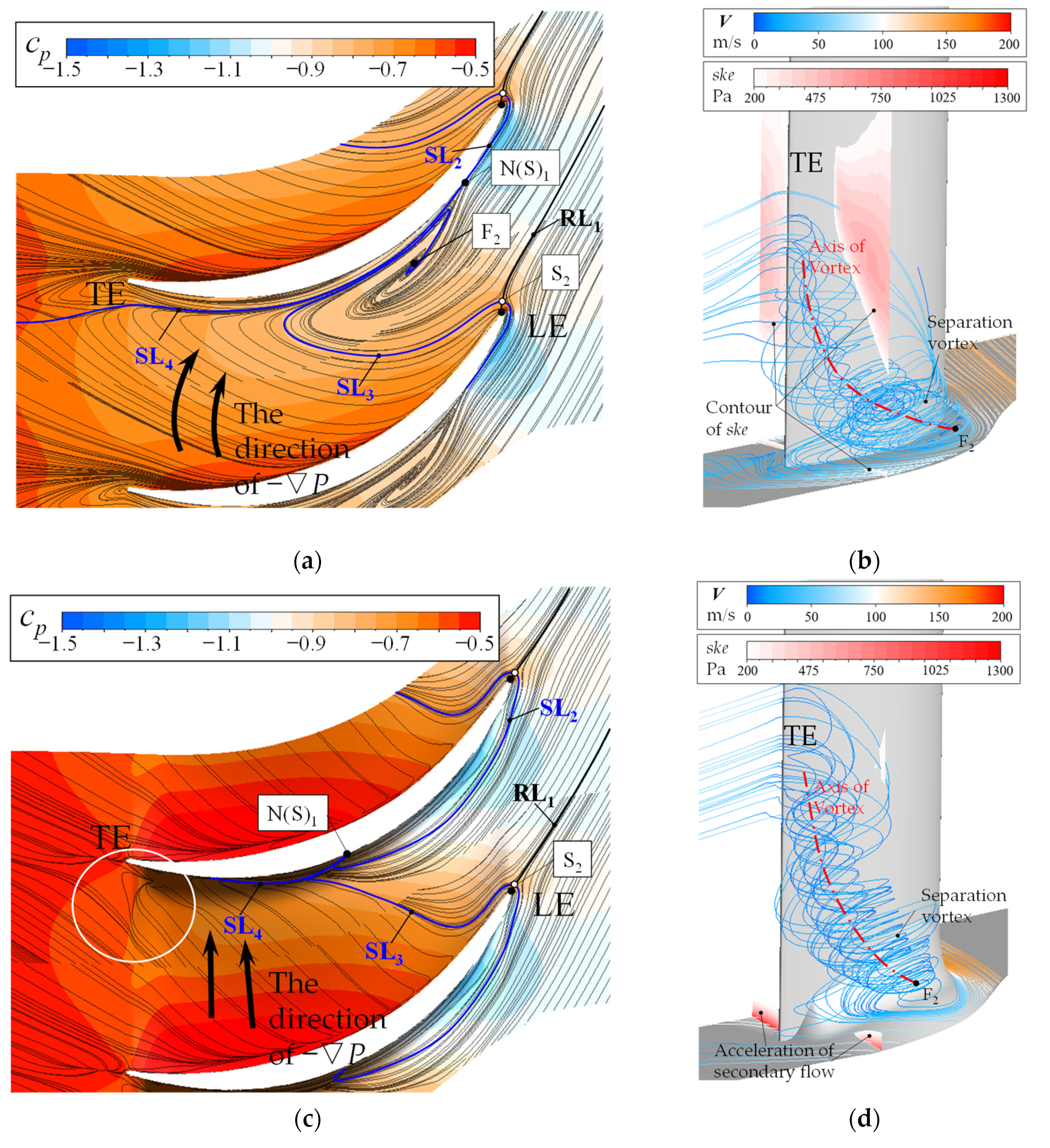
5.3. The Effect of NEWC on the Flow Field
5.4. Summing-Up of the Effective End Wall Contouring Rules
6. Conclusions
- (1)
- The idea behind the new end wall contouring method is to define multiple groups of end wall contouring units with different secondary flow control functions during the parameterization and then combine their flow control effects by applying a weighted superimposition of all the end wall contouring units. Compared with the previous studies, the new end wall contouring method enables the flexible combination of the control force from more than one position of the end wall surface.
- (2)
- The optimum end wall contouring presents a full-range end wall surface with a rising suction side and a sinking pressure side, while locally raising the end wall from the LE to the TE in the SS corner with a gentle upstream slope. The corresponding effect on the flow field is to adjust the pressure gradient from the middle to the rear part of the blade channel, to accelerate the end wall secondary flow when it reaches the SS corner. As a result, the accelerated secondary flow will suppress the spreading range of corner separation and, at the same time, reduce the dissipation loss between the low-energy separation flow and the high-speed main flow.
- (3)
- The design space of the new method is constructed with a relatively small number of control variables, but it contains sufficient effective solutions for controlling the corner separation. As a result, the optimization process reaches convergence with a relatively shorter computing time than the traditional method. The optimal design reduces the total pressure loss coefficient of the high-load cascade by 5% at the design point and by 3% when the incidence is increased. The numerical results confirm its effectiveness in controlling corner separation with multiple operating points, regardless of the significant difference in the development of corner separation. There is also a clear relationship between flow control and parameter settings. This finding thus indicates the advantage of the newly developed end wall contouring method compared with previous studies.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Variables | |
| AVDR | Axial density flow ratio |
| C | Chord length |
| Ca | Axial chord length |
| cp | The static pressure coefficient |
| CP | Specific heat capacity |
| h | Height of the blade |
| H | The height of the end wall contouring in standard space |
| i | Incidence |
| l | The pitch-wise distance between adjacent blades |
| LS | Total pressure loss coefficient corresponding to the loss source |
| k0 | Zeroing factor of the end wall contouring |
| k | Ratio of specific heat |
| K | Mechanical energy |
| ṁ | Mass flow rate |
| P, P*, ᐁP | Static pressure, total pressure and static pressure gradient |
| r | Coordinate of the radial direction |
| s | Solidity |
| ske | Secondary kinetic energy |
| span | The normalized spanwise distance |
| T* | Total temperature |
| ui | The ith end wall contouring unit |
| v | Control volume of the computational domain |
| V | Velocity |
| wi | The weight factor of the ith end wall contouring unit |
| x, y, z | The Cartesian coordinate |
| α, β, δ | Coordinate of the standard end wall contouring surface |
| θ | Coordinate of the circumferential direction |
| β1k, β2k | The inlet and outlet blade angle |
| γ | Stagger angle |
| Γ | The correlation coefficient |
| κs, κ1, κ2, κ3 | The streamwise end wall contouring factors |
| κl, κr | The pitch-wise end wall contouring factors |
| ρ | Density |
| Φ | Dissipation function |
| ω | The pitch-averaged total pressure loss coefficient |
| ωo | The overall total pressure loss coefficient |
| ώ | The streamwise growth rate of total pressure loss |
| Abbreviation | |
| LE | Leading edge |
| F | Focus point |
| NEWC | Non-axisymmetric end wall contouring |
| OP1, OP2 | The first and second operating points |
| PS | Pressure surface |
| RL | Reattachment line |
| SL | Separation line |
| S | Saddle point |
| SS | Suction surface |
| TE | Trailing edge |
References
- Koff, B.L. Gas Turbine Technology Evolution: A Designers Perspective. J. Propuls. Power 2004, 20, 577–595. [Google Scholar] [CrossRef]
- Liu, B.; An, G.; Yu, X. Experimental investigation of the effect of rotor tip gaps on 3D separating flows inside the stator of a highly loaded compressor stage. Expl. Therm. Fluid. Sci. 2016, 75, 96–107. [Google Scholar] [CrossRef] [Green Version]
- Fei, T.; Ji, L.; Yi, W. Investigation of the Dihedral Angle Effect on the Boundary Layer Development Using Special-Shaped Expansion Pipes. In Proceedings of the ASME Turbo Expo, Oslo, Norway, 11–15 June 2018. GT2018-76383. [Google Scholar]
- Taylor, J.V.; Miller, R.J. Competing 3D Mechanisms in Compressor Flows. Vol. 7b Struct. Dyn. 2015, 139, 021009. [Google Scholar] [CrossRef]
- Lei, V.-M.; Spakovszky, Z.S.; Greitzer, E.M. A Criterion for Axial Compressor Hub-Corner Stall. J. Turbomach. 2008, 130, 031006. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Chu, W.; Zhang, H. Investigation on relation between secondary flow and loss on a high loaded axial-flow compressor cascade. J. Propul Technol. 2014, 35, 914–925. [Google Scholar]
- Rose, M.G. Non-Axisymmetric Endwall Profiling in the HP NGV’s of an Axial Flow Gas Turbine. In Proceedings of the ASME 1994 International Gas Turbine and Aeroengine Congress and Exposition, The Hague, The Netherlands, 13–16 June 1994; American Society of Mechanical Engineers Digital Collection: New York, NY, USA, 1994. [Google Scholar] [CrossRef] [Green Version]
- Brennan, G.; Harvey, N.W.; Rose, M.G.; Fomison, N.; Taylor, M.D. Improving the Efficiency of the Trent 500-HP Turbine Using Nonaxisymmetric End Walls—Part I: Turbine Design. J. Turbomach. 2003, 125, 497–504. [Google Scholar] [CrossRef]
- Hu, S.; Lu, X.; Zhang, H.; Zhu, J.; Xu, Q. Numerical investigation of a high-subsonic axial-flow compressor rotor with non-axisymmetric hub endwall. J. Therm. Sci. 2010, 19, 14–20. [Google Scholar] [CrossRef]
- Harvey, N.W. Some Effects of Non-Axisymmetric End Wall Profiling on Axial Flow Compressor Aerodynamics: Part I—Linear Cascade Investigation. In Proceedings of the ASME Turbo Expo 2008: Power for Land, Sea, and Air, Berlin, Germany, 9–13 June 2008; American Society of Mechanical Engineers Digital Collection: New York, NY, USA, 2008; pp. 543–555. [Google Scholar] [CrossRef]
- Meng, T.; Yang, G.; Zhou, L.; Ji, L. Full blended blade and endwall design of a compressor cascade. Chin. J. Aeronaut. 2021, 34, 79–93. [Google Scholar] [CrossRef]
- Harvey, N.W.; Offord, T.P. Some Effects of Non-Axisymmetric End Wall Profiling on Axial Flow Compressor Aerodynamics: Part II—Multi-Stage HPC CFD Study. In Proceedings of the ASME Turbo Expo 2008: Power for Land, Sea, and Air, Berlin, Germany, 9–13 June 2008; American Society of Mechanical Engineers Digital Collection: New York, NY, USA, 2008; pp. 557–569. [Google Scholar] [CrossRef]
- Reising, S.; Schiffer, H.-P. Non-Axisymmetric End Wall Profiling in Transonic Compressors—Part I: Improving the Static Pressure Recovery at Off-Design Conditions by Sequential Hub and Shroud End Wall Profiling. In Proceedings of the ASME Turbo Expo 2009: Power for Land, Sea, and Air, Orlando, FL, USA, 8–12 June 2009; American Society of Mechanical Engineers Digital Collection: New York, NY, USA, 2009; pp. 11–24. [Google Scholar] [CrossRef]
- Reising, S.; Schiffer, H.-P. Non-Axisymmetric End Wall Profiling in Transonic Compressors—Part II: Design Study of a Transonic Compressor Rotor Using Non-Axisymmetric End Walls—Optimization Strategies and Performance. In Proceedings of the ASME Turbo Expo 2009: Power for Land, Sea, and Air, Orlando, FL, USA, 8–12 June 2009; American Society of Mechanical Engineers Digital Collection: New York, NY, USA, 2009; pp. 25–37. [Google Scholar] [CrossRef]
- Lepot, I.; Mengistu, T.; Hiernaux, S. Highly Loaded LPC Blade and Non Axisymmetric Hub Profiling Optimization for En-hanced Efficiency and Stability. In Proceedings of the ASME Turbo Expo, British Columbia, BC, Canada, 6–10 June 2011. GT2011-46261. [Google Scholar]
- Dorfner, C.; Hergt, A.; Nicke, E.; Moenig, R. Advanced Nonaxisymmetric End wall Contouring for Axial Compressors by Generating an Aerodynamic Separator—Part I: Principal Cascade Design and Compressor Application. J. Turbomach. 2011, 133, 021026. [Google Scholar] [CrossRef]
- Hergt, A.; Dorfner, C.; Steinert, W.; Nicke, E.; Schreiber, H. Advanced Non-axisymmetric End wall Contouring for Axial Compressors by Generating an Aerodynamic Separator—Part II: Experimental and Numerical Cascade Investigation. J. Tur-Bomach 2011, 133, 021027. [Google Scholar]
- Reutter, O.; Hemmert-Pottmann, S.; Hergt, A.; Nicke, E. Endwall Contouring and Fillet Design for Reducing Losses and Homogenizing the Outflow of a Compressor Cascade. In Proceedings of the ASME Turbo Expo 2014: Turbine Technical Conference and Exposition, Düsseldorf, Germany, 16–20 June 2014; American Society of Mechanical Engineers Digital Collection: New York, NY, USA, 2014. [Google Scholar] [CrossRef]
- Varpe, M.K.; Pradeep, A.M. Benefits of non-axisymmetric endwall contouring in a compressor cascade with a tip clearance. J. Fluids. Eng. 2015, 137, 051101. [Google Scholar] [CrossRef]
- Li, X.; Chu, W.; Wu, Y. Numerical investigation of inlet boundary layer skew in axial-flow compressor cascade and the cor-responding non-axisymmetric end wall profiling. J. Power Energy 2014, 228, 638–656. [Google Scholar] [CrossRef]
- Li, X.; Chu, W.; Wu, Y.; Zhang, H.; Spence, S. Effective end wall profiling rules for a highly loaded compressor cascade. Proc. Inst. Mech. Eng. Part A J. Power Energy 2016, 230, 535–553. [Google Scholar] [CrossRef] [Green Version]
- Chu, W.; Li, X.; Wu, Y.; Zhang, H. Reduction of end wall loss in axial compressor by using non-axisymmetric profiled end wall: A new design approach based on end wall velocity modification. Aerosp. Sci. Technol. 2016, 55, 76–91. [Google Scholar] [CrossRef]
- Li, X.; Dong, J.; Chen, H.; Lu, H. The Control of Corner Separation with Parametric Suction Side Corner Profiling on a High-Load Compressor Cascade. Aerospace 2022, 9, 172. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Heigh of the blade (h) | 100 mm |
| Chord (C) | 40 mm |
| Axial chord (Ca) | 36.2 mm |
| Pitch (s) | 20 mm |
| Inlet blade angle (β1k) | 59° |
| Outlet blade angle (β2k) | 10° |
| Stagger angle (γ) | 25° |
| Loss Sources | LSLE | LSBF | LSSU | LSSD | LSske | LSSEP |
|---|---|---|---|---|---|---|
| i = 0° | 0.0744 | 0.0631 | 0.0418 | 0.0566 | 0.0017 | 0.0968 |
| i = 4° | 0.1065 | 0.0755 | 0.0561 | 0.0852 | 0.0025 | 0.1389 |
| i = 0° | i = 4° | |
|---|---|---|
| −10.18% | −13.01% | |
| −12.89% | −16% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
You, F.; Li, X.; Lu, Q.; Zhang, H.; Chu, W. Numerical Investigation into a New Method of Non-Axisymmetric End Wall Contouring for Axial Compressors. Energies 2022, 15, 3305. https://doi.org/10.3390/en15093305
You F, Li X, Lu Q, Zhang H, Chu W. Numerical Investigation into a New Method of Non-Axisymmetric End Wall Contouring for Axial Compressors. Energies. 2022; 15(9):3305. https://doi.org/10.3390/en15093305
Chicago/Turabian StyleYou, Fuhao, Xiangjun Li, Qing Lu, Haoguang Zhang, and Wuli Chu. 2022. "Numerical Investigation into a New Method of Non-Axisymmetric End Wall Contouring for Axial Compressors" Energies 15, no. 9: 3305. https://doi.org/10.3390/en15093305
APA StyleYou, F., Li, X., Lu, Q., Zhang, H., & Chu, W. (2022). Numerical Investigation into a New Method of Non-Axisymmetric End Wall Contouring for Axial Compressors. Energies, 15(9), 3305. https://doi.org/10.3390/en15093305