1. Introduction
Due to the depletion of energy resources and greenhouse gas emissions caused by the consumption of fossil fuels, energy harvesting from renewable energy sources has received considerable interest recently. Among these renewable energy sources, ocean energy is shown to be inexhaustible and potentially cost competitive, since ocean covers almost 70% of the earth’s surface [
1]. The worldwide wave power potential is approximately 2.5 TW. One percent to five percent of the annual total worldwide electricity demand could be easily supplied by wave energy [
2,
3,
4]. That is why we focus on the tidal current turbine technology in this paper, particularly on the sizing of the electrical generator.
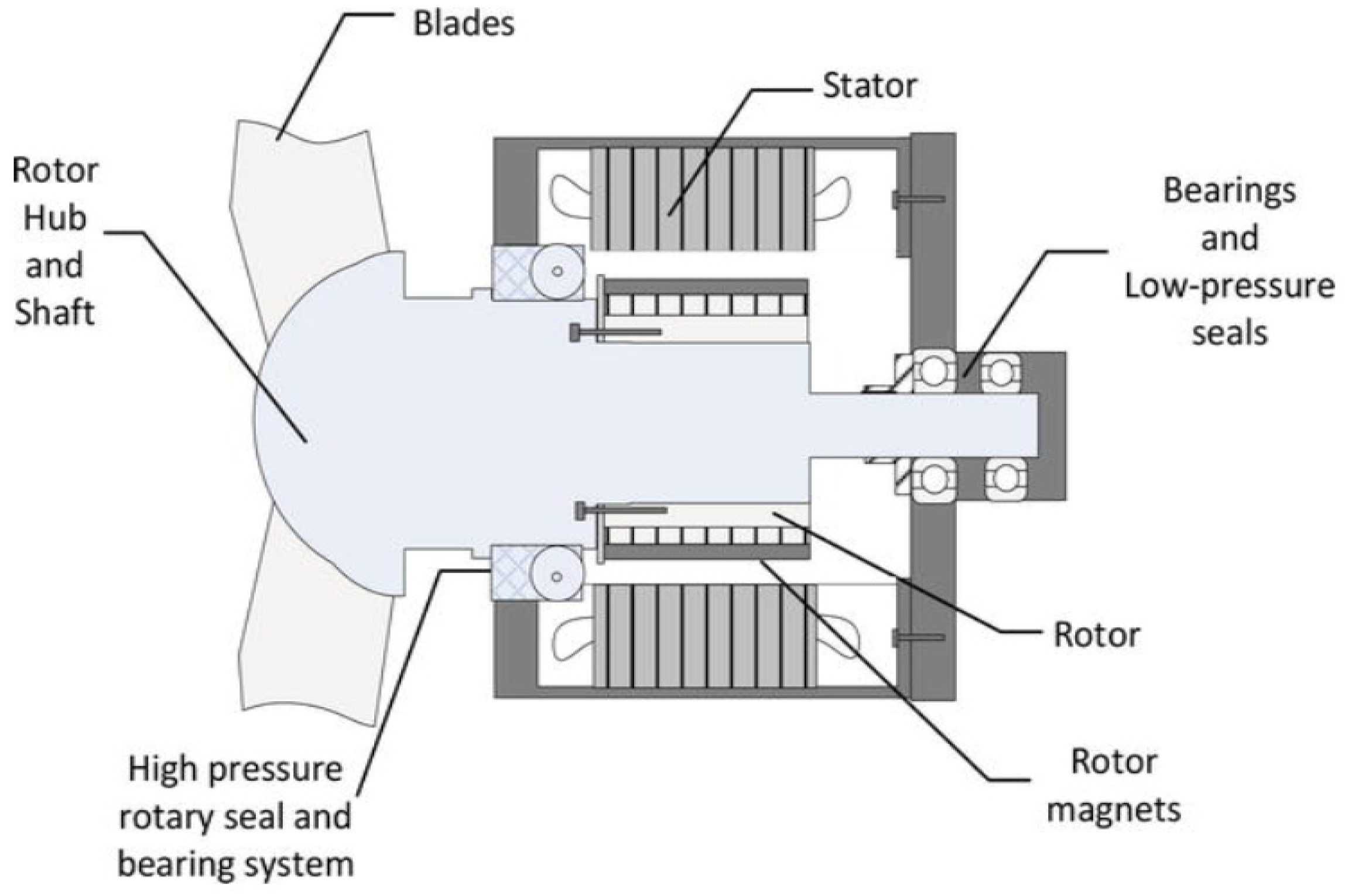
Figure 1 shows the example of the AR2000 horizontal tidal turbine (HATT). Vertical axis tidal turbines and other topologies are also used to harness tidal energy but most of the research and development efforts are focused on horizontal axis tidal turbine [
5]. Therefore, the AR2000 tidal turbine whose characteristics are described in
Table 1 will be used in the present study as support for our design methodology. The submerged electrical machine is considered completely enclosed with an airgap filled with air under pressure in order to help the cooling. Such an architecture is represented in
Figure 2.
In the specific case of tidal turbines, the main challenge of the designer is to size the electrical generator considering the working cycle while managing all the constraints, especially the thermal one because the machine never operates in a steady state. It is also of great interest to take into account the control strategy by optimizing the current and voltage parameters according to variable operating points. Whereas conventional solutions prefer synchronous permanent magnet machines [
9,
10], the use of Electrically Excited Synchronous Generators remains an interesting solution. The removal of magnets from electrical machines is actually increasingly investigated in order to free themselves from their excessive and highly fluctuating cost and the risks of supply disruption in a very tight market [
11,
12]. If, for wind turbines, the predominant mass criterion naturally involves the use of permanent magnet generators, for tidal turbines placed on the sea bottom, this criterion can be put in second place, and we can focus on energy efficiency instead. In the light of these observations, the EESG becomes an interesting solution. Note also that with EESG, dangerous overcurrents can be avoided in case of a short circuit.
In the field of renewable energies like tidal harvesting energy, the generator is generally designed for the rated power [
13,
14,
15,
16]. However, in the light of the intermittence of renewable energy sources, using such a method may lead to oversize the generator particularly if the permanent thermal regime is never reached. All points of the operating cycle must therefore be taken into account to calculate the temperature profile during the working cycle. A cycle often consists of hundreds or even several thousands of operating points. Thus, taking into account all points of the cycle in the optimization process by a genetic algorithm, for example, constitute a real problem in terms of computation time. In order to solve this problem today, the only way consists of replacing all working points by a representative point or, in the best case, to reduce the study by a few points from an analysis of the energy distribution over the cycle [
17,
18,
19,
20,
21,
22]. For example, in [
23], the authors reduce the whole cycle to only two points. In [
24], which deals with the design of a Direct Drive Permanent Magnet Generator for a Tidal Current Turbine, the objective function, in addition to the material cost, is made of 10 discrete operating points associated to the probability density of each operating point. However, such an approach is approximate because it ignores the temporal variations that is necessary to manage correctly the thermal transient and the control strategy to maximize the efficiency. In addition, because the thermal dynamic analysis was not considered, the maximum temperature elevation calculated is equivalent to the temperature elevation calculated with a continuous rated power.
Therefore, this paper focuses on an approach allowing to solve the complete problem without an excessive increase in calculation time. Developed for the first time in [
25] the method was based on a 1D analytical model and applied to the case of a PMSM. It was shown how it is possible to optimize a machine from the torque and speed profiles. However, the thermal transient was not taken into account and the armature reaction was neglected. We propose therefore to complete this approach and apply it for the first time to the case of the EESG. To our knowledge, such an approach has been never made for this machine. In this paper, the objective is to size a generator from the torque and speed profiles supplied by the turbine AR2000 with the variation of the tidal currents that we took at the French coast in the Raz de Sein.
The paper is organized as follows: the analytical model used is developed in
Section 2.
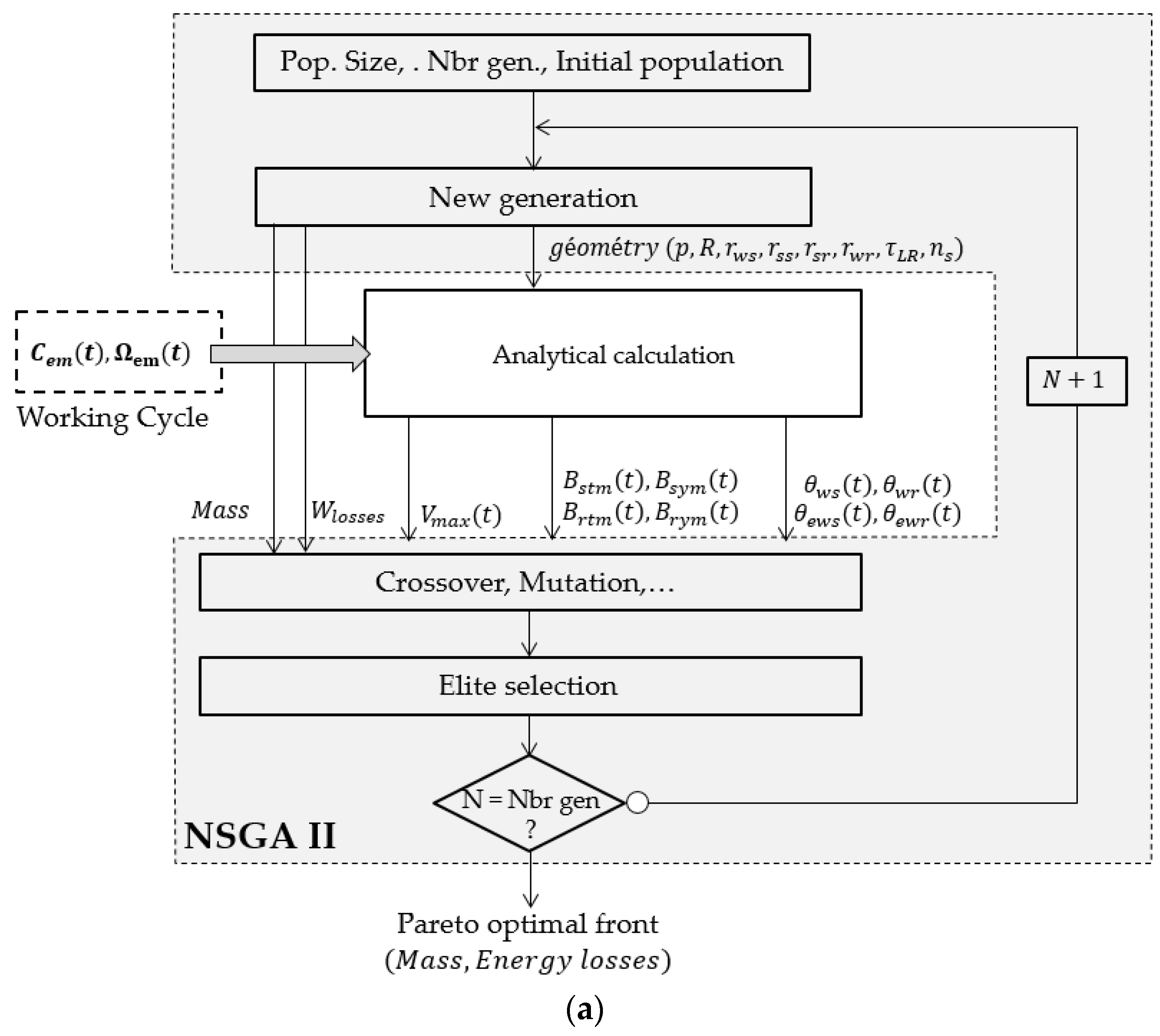
Section 3 describes the optimization methodology and the way to solve the problem.
Section 4 presents the application and the results of the selected optimal machine with its optimal geometry and optimum control parameters. The design of the selected machine is finally validated by a 2D Finite Element Analysis.
4. Application
In this section, we present the result of the design optimization based on the method presented in
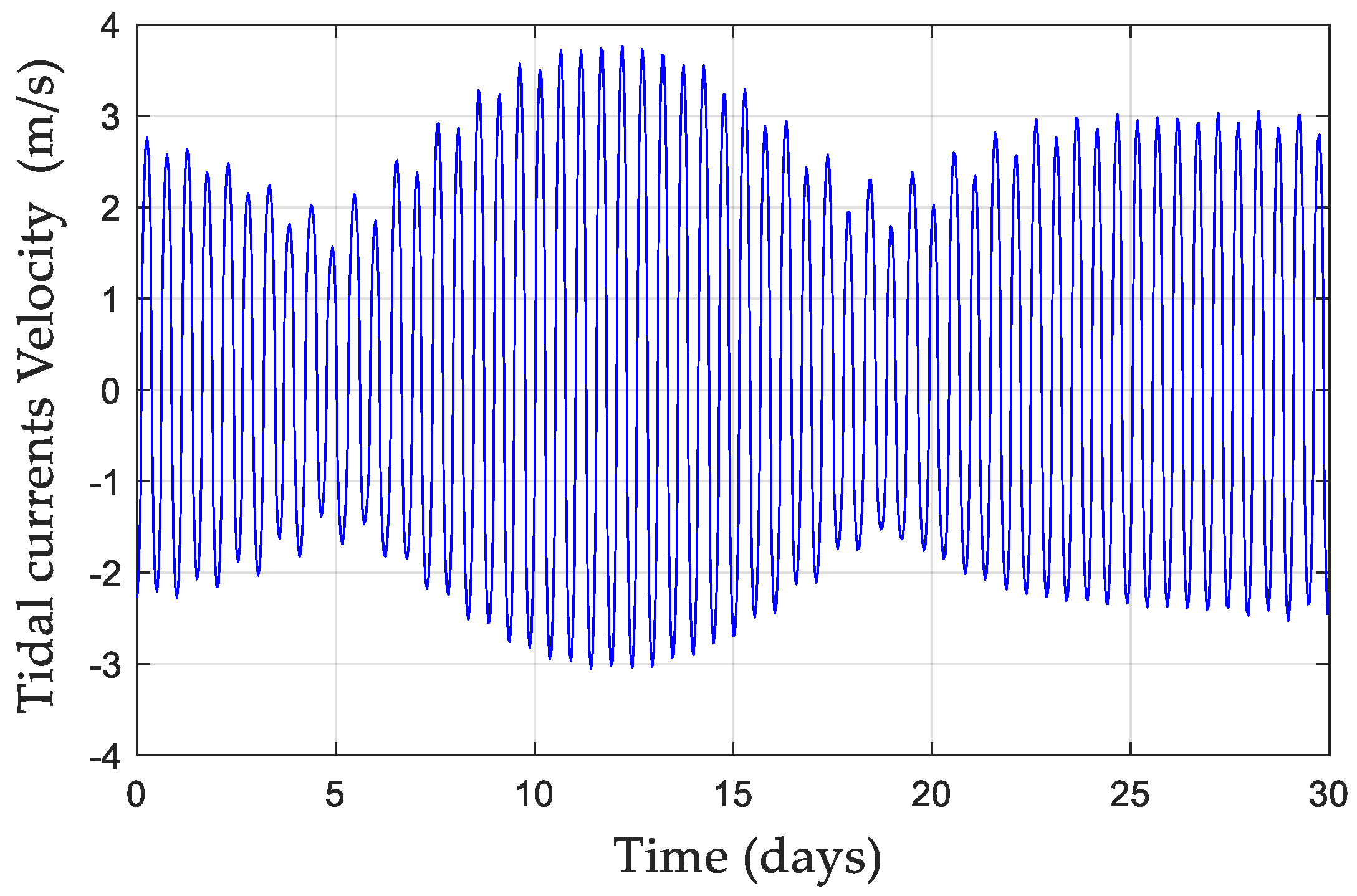
Section 3 and applied to size a 2 MW generator. We have chosen the site at the French coast, in the Raz de Sein, for its high tidal currents velocity.
Figure 7 shows the tidal speed profile for the month of highest production (September) made of 720 points (one point per hour) [
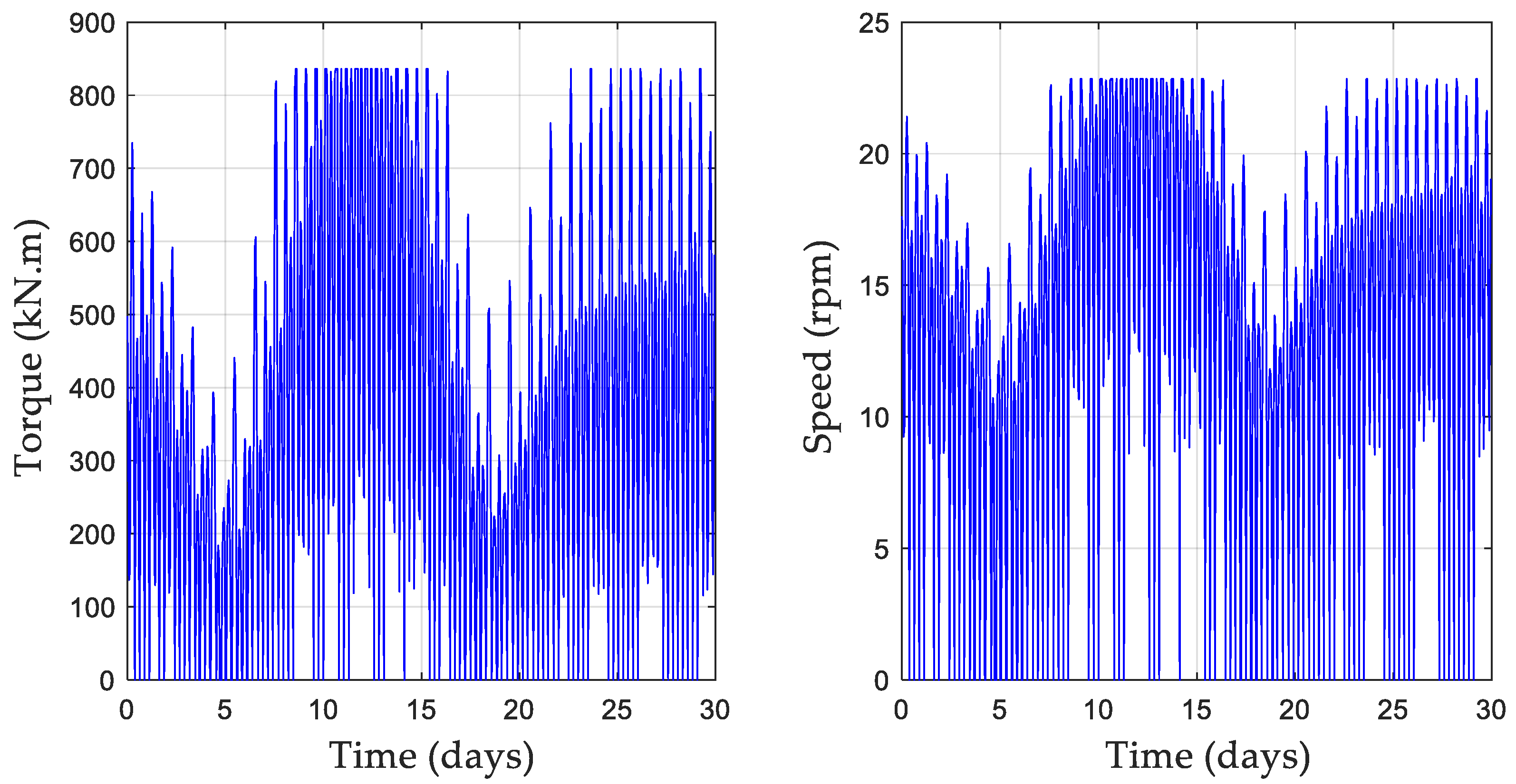
38]. From these data and the AR200 tidal turbine specifications, the torque and the speed profiles of the generator can be obtained [
39] (see
Figure 8). The values of the main constant parameters used in this optimization are presented in the
Appendix A.
4.1. Optimization Results
The NSGA II has been used with a number of generations and a population size respectively chosen from 2000 to 300. The result is obtained with an acceptable computation time (less than 30 min).
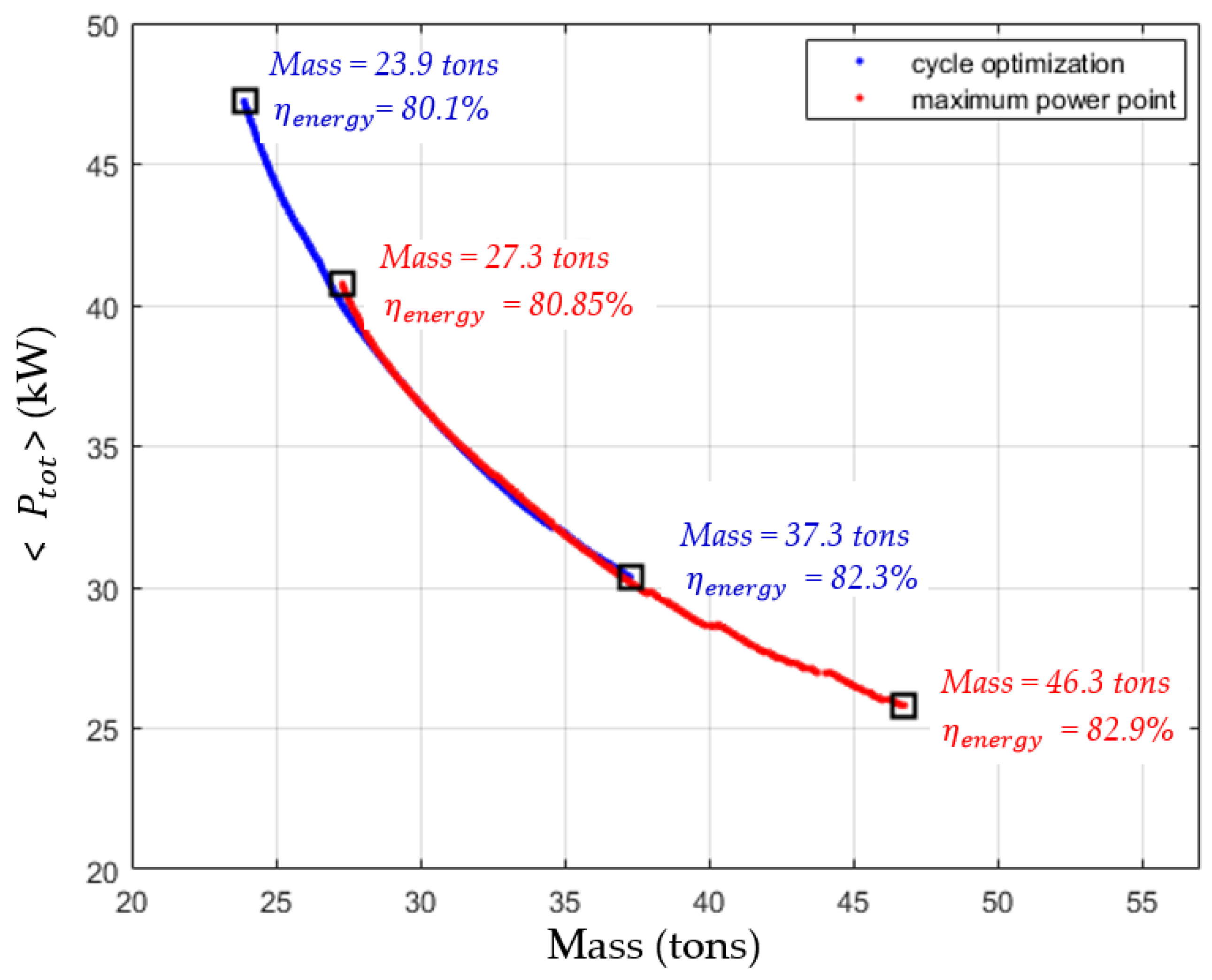
Figure 9 gives the Pareto optimal front obtained. To compare this result with conventional sizing and show the interest of the proposed method, the result of an optimization considering the maximum power point is given (red curve). It can be seen that the optimization at the nominal operating point for this application leads to oversize the generator. For the lightest machines, the difference in mass is greater than 18%. Conversely, the best energy efficiency is obtained for a design at the nominal operating point, but the difference is not significant (less than 2%).
The choice of the optimal geometry is the result of a compromise between mass and efficiency. Such a choice would be the result of a study comparing the manufacturing cost (related to the mass) to the production gains over the life of the machine. Such a study, made possible by the presented method, however, falls outside the scope of the paper and will be developed in a future publication. We will therefore present the result for the lightest optimal machine.
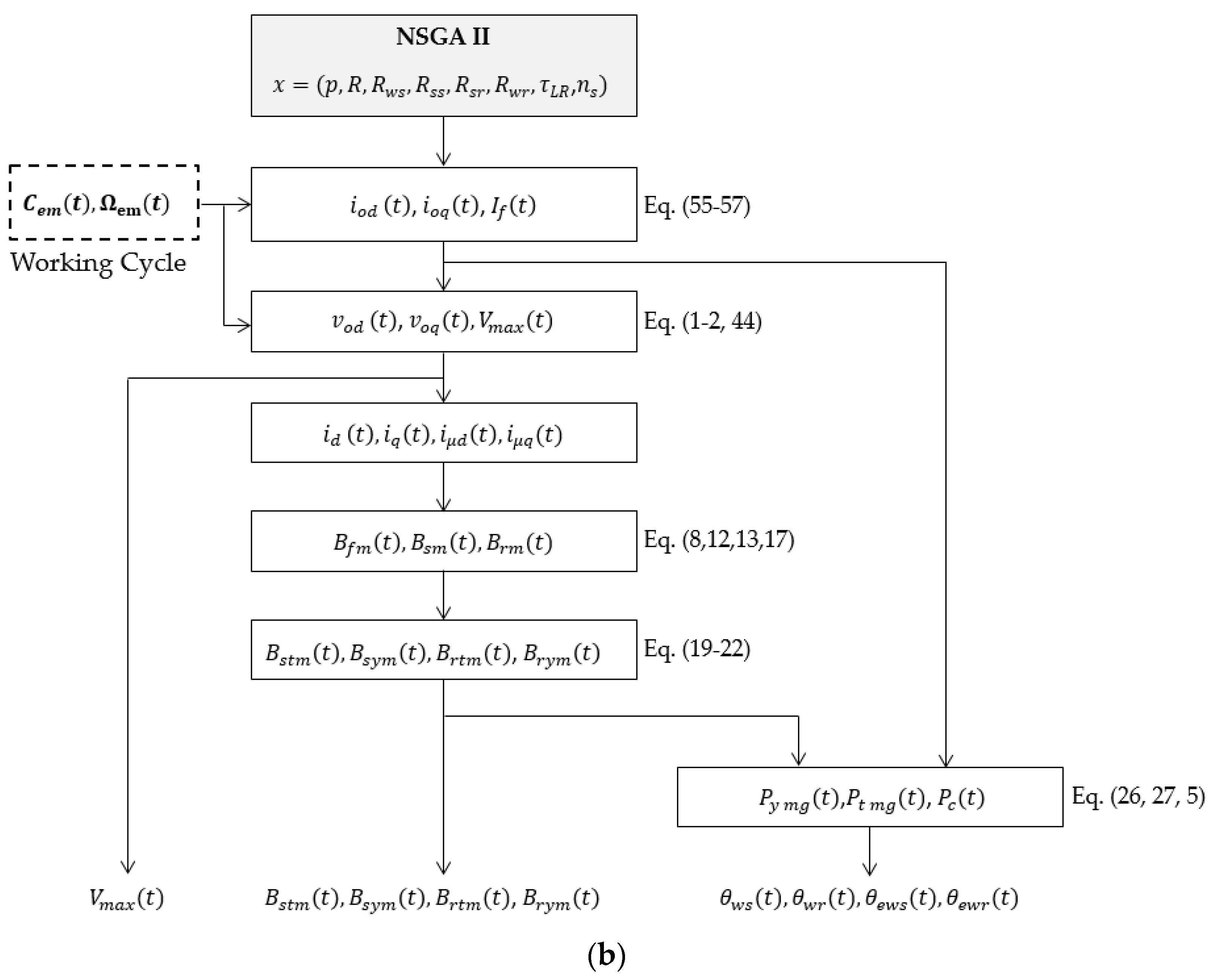
Then, the optimal geometry and the main characteristics of the selected generator are summarized in
Table 3. For this optimization, the saturation and manufacturing constraints (minimum thickness of the yokes) are reached. From the optimal variables (
,
) found with the NSGA II, which are given in
Table 3, the optimal magnetomotive forces
,
and
are calculated afterwards with Equations (49)–(57) such as represented in
Figure 6b with
. In
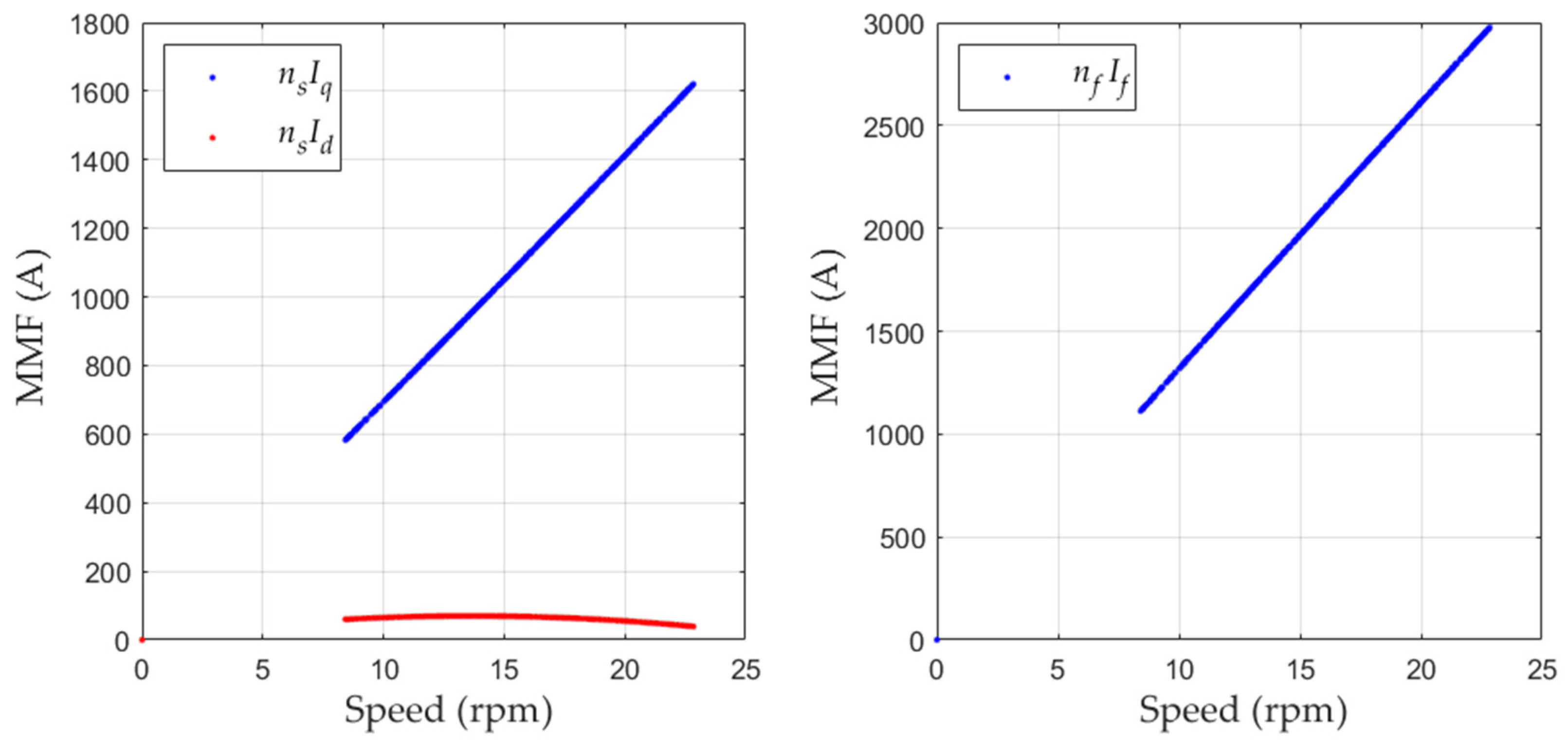
Figure 10, the optimal magnetomotive forces (related to d-q axis stator currents and rotor current) are represented as a function of the mechanical speed. We can observe that the flux weakening is obtained on both the excitation current and the d-axis stator current. However, we can see that the flux weakening is mainly obtained by the rotor winding. In this case, the low value of the
component would make it possible to consider a control at
, which would simplify the control of the generator.
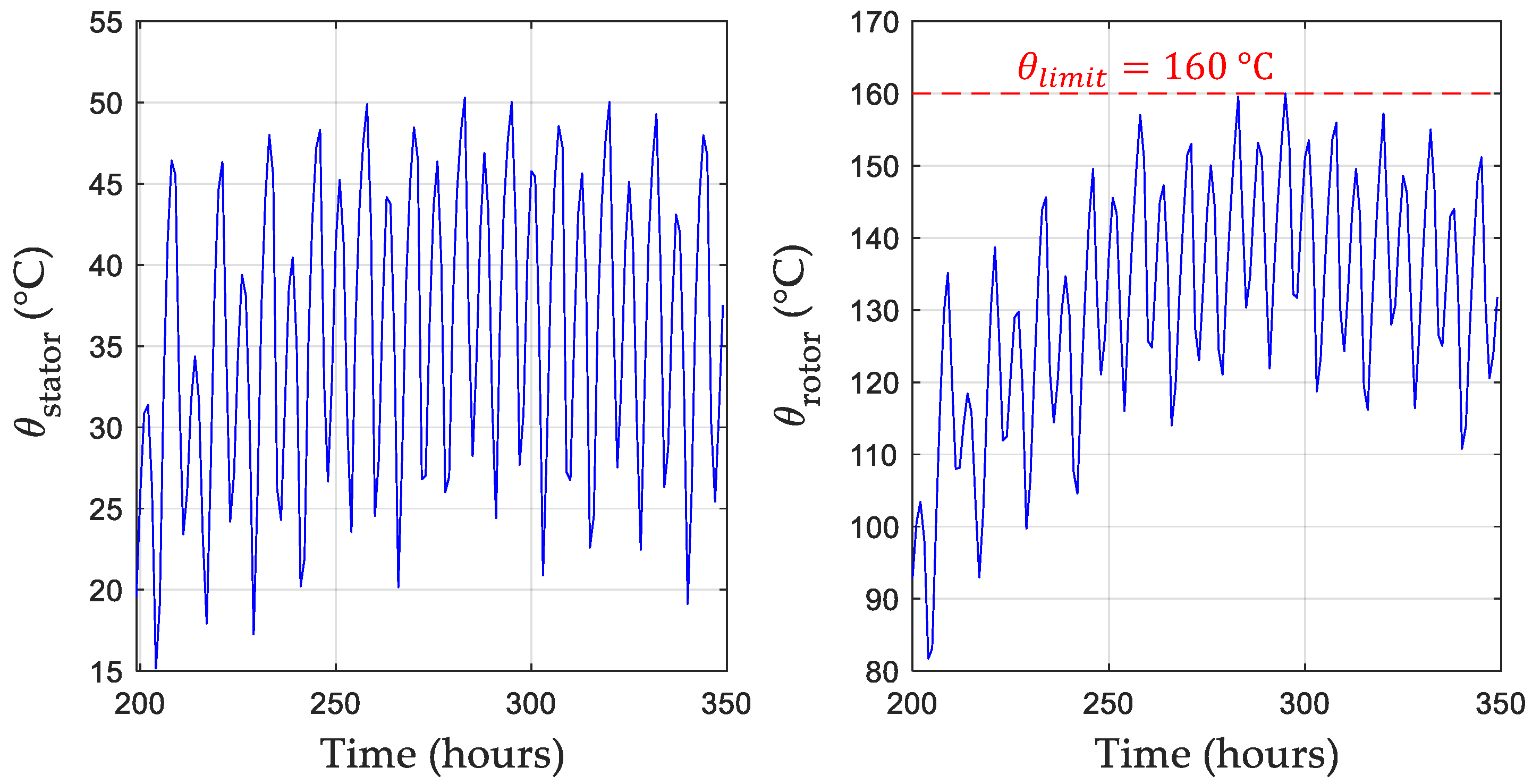
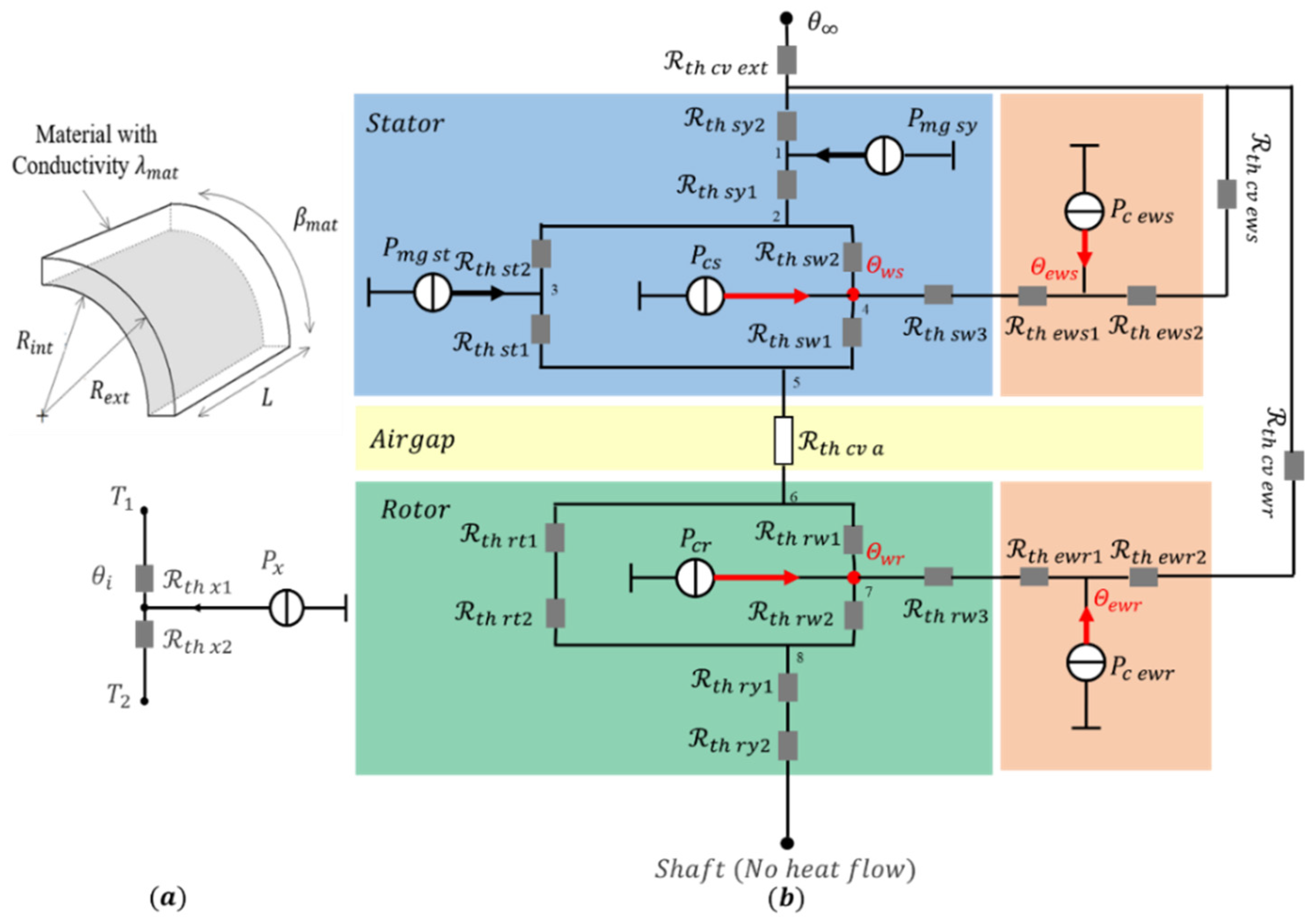
Finally,
Figure 11 shows the evolution temperature in the stator and rotor windings during the sequence where the machine is the warmest. This calculation is conducted by solving Equation (42) applied to the thermal network. It can be noted that the optimization algorithm respects the temperature limit even if the steady state is not reached throughout the working cycle.
4.2. 2D Validation
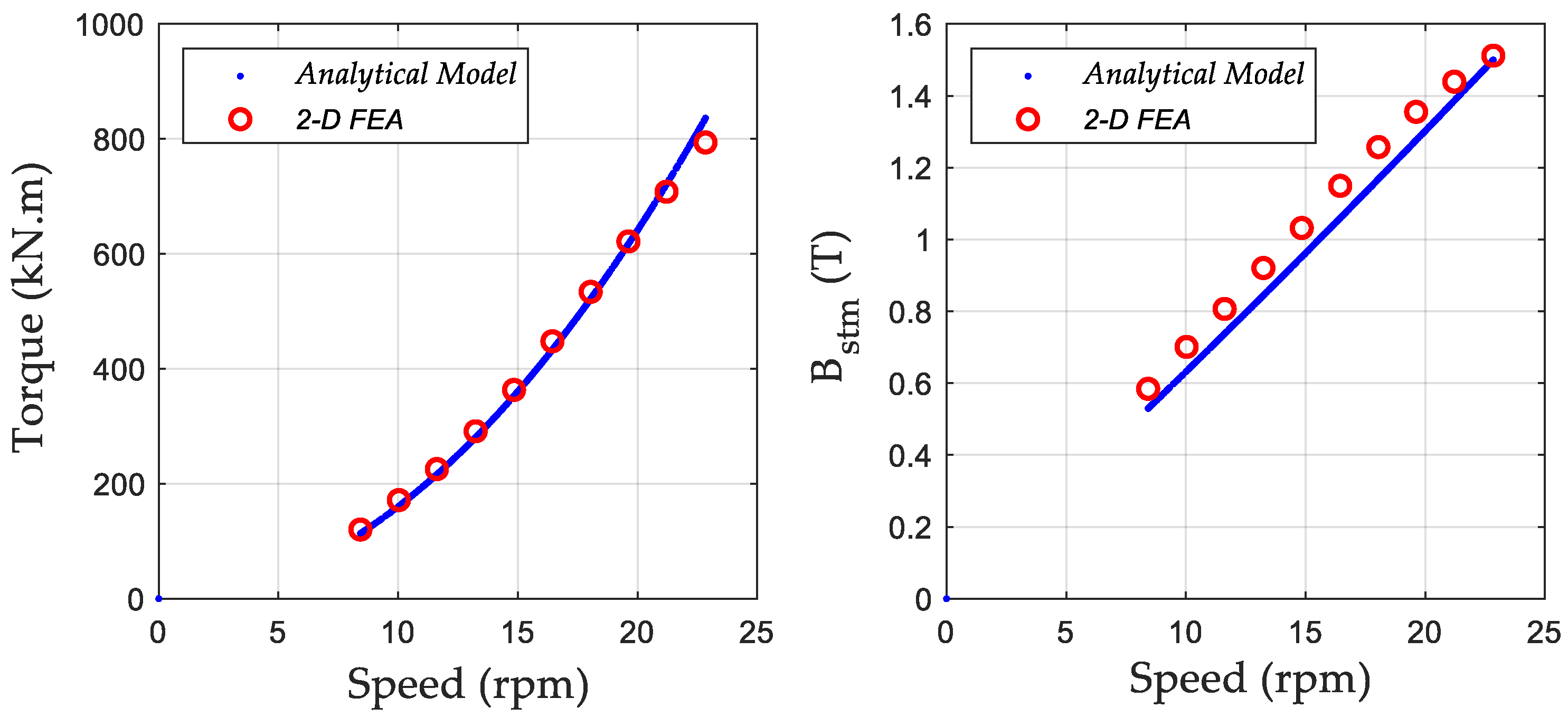
In this section, the analytical model used in our optimization is validated for the optimal selected design. The magnetics field and the electromagnetic torque calculated from the analytic model are compared to their values extracted from a 2D finite element analysis (FEA).
Table 4 presents these results obtained for the flux densities and the torque at the minimal power and the maximal power.
Figure 12 presents this comparison of the torque and the stator teeth for all operating points represented by their mechanical speed. The variations between the models remain always lower than 10%. Such a result validates either the 1D analytical model used and the magnetic saturation constraint.
Table 5 gives the iron losses obtained from the FEA considering the seventh first harmonics of the flux density at nominal power, regularly taken in the teeth and in the yoke. It shows a relatively low influence of the spatial components neglected by the 1D analytical model. Their magnitude remains low compared to the main component, and their location is limited to areas of limited cross-section (the border area between the tooth and yoke).
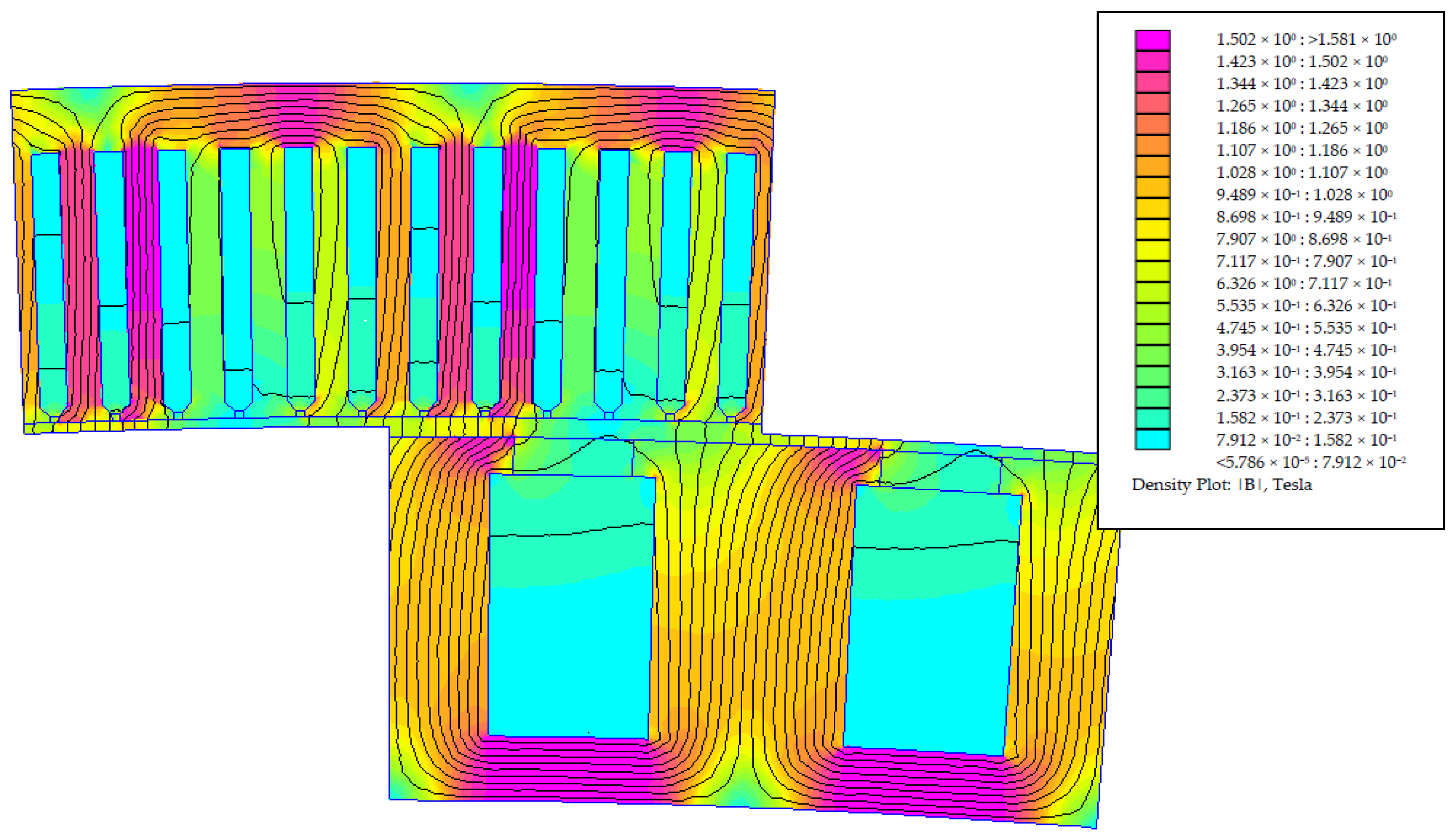
Figure 13 displays the flux lines and flux density obtained with the FEA at the nominal working point.
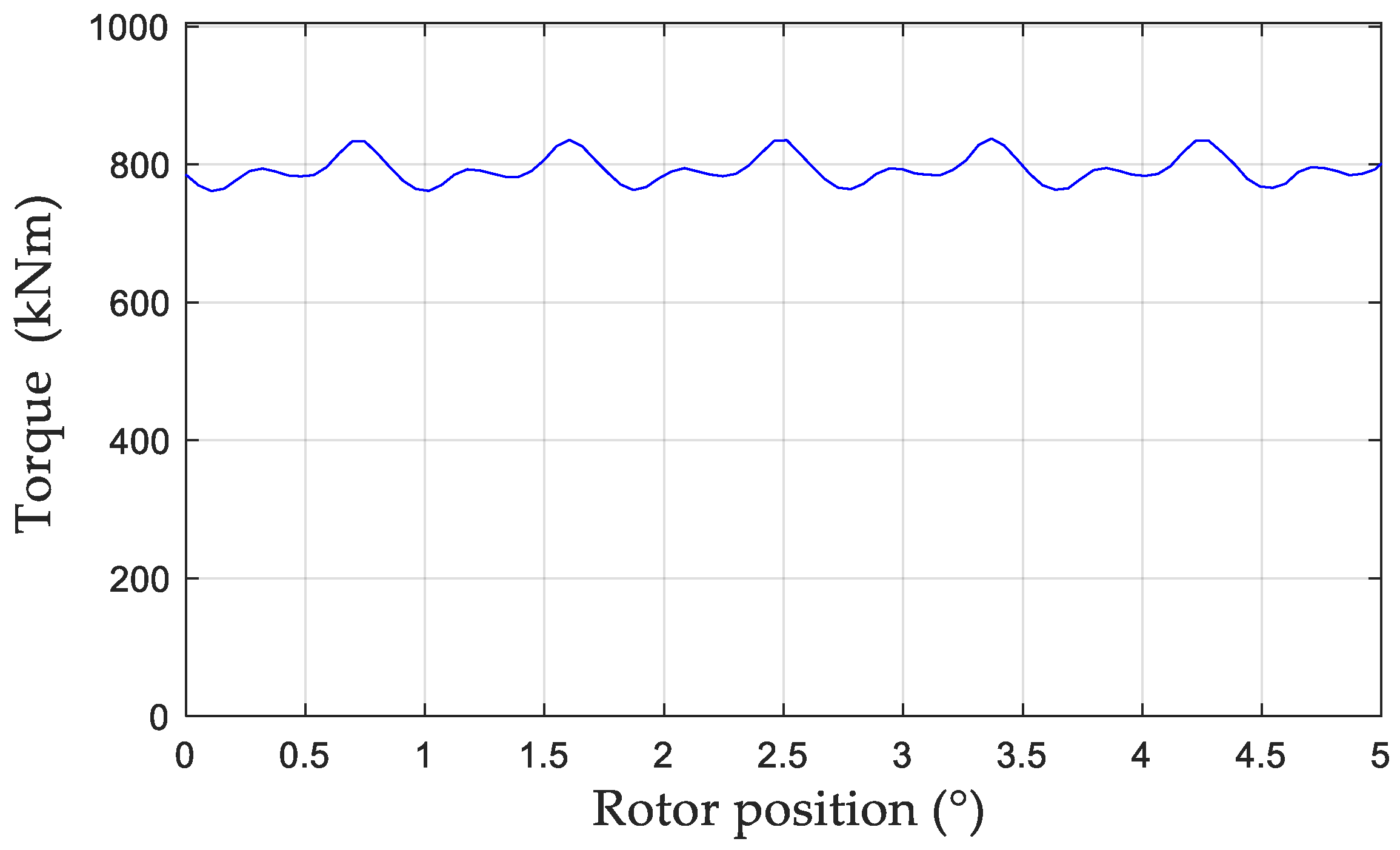
Figure 14 shows the torque evolution with the rotor position at the maximum power. The torque ripple measured is lower than 5% which can be considered satisfactory for a first result.
5. Conclusions
In this paper, we have presented a new method to solve with a reduced computation time the sizing problem of an EESG that works at variable speed and torque. This method is particularly useful and efficient when the machine works at a transient thermal regime. In addition, the method presented allows optimization of the control strategy, optimizing for all operating points of the stator current ( and and the excitation filed current (, which cannot be conducted by classical solutions. It can be seen that the minimization of electrical losses is achieved by a flux weakening acting on both and . For the particular case of the tidal application studied here, a control at may be implemented and the flux weakening performed by the excitation filed current alone. The results obtained also showed that the method lead to reduce the mass by 18% compared to a conventional sizing at the nominal operating point while controlling the losses by an optimization of the currents. The FEA shows that, despite a simple 1D magnetic model, the design obtained is already acceptable. Among the possible improvements, the authors work to develop a magnetic model with saturation which will be presented in future works.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}