
A Negative Sequence Current Phasor Compensation Technique for the Accurate Detection of Stator Shorted Turn Faults in Induction Motors


Abstract
:1. Introduction
2. Negative Sequence Current Analysis
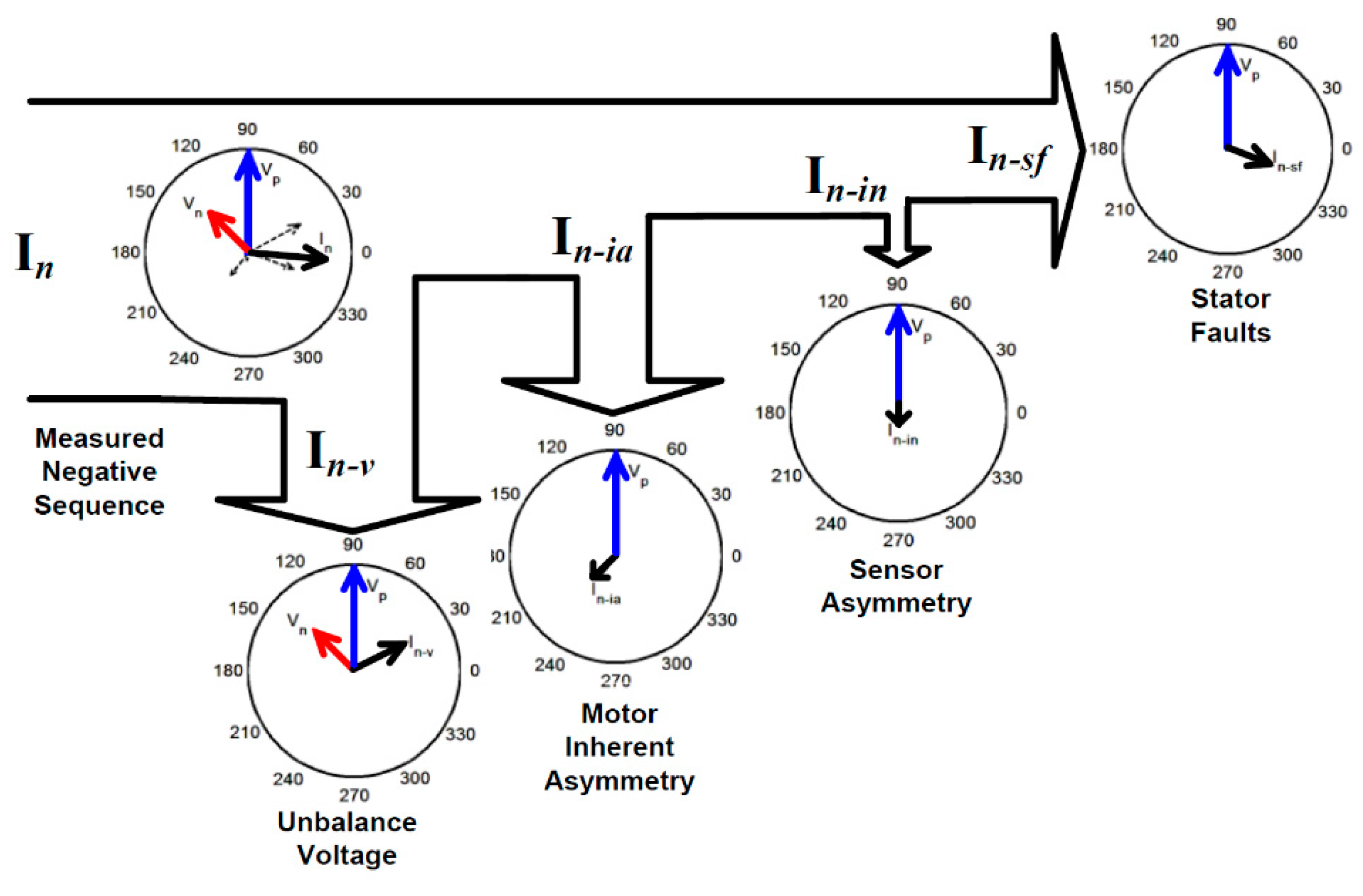
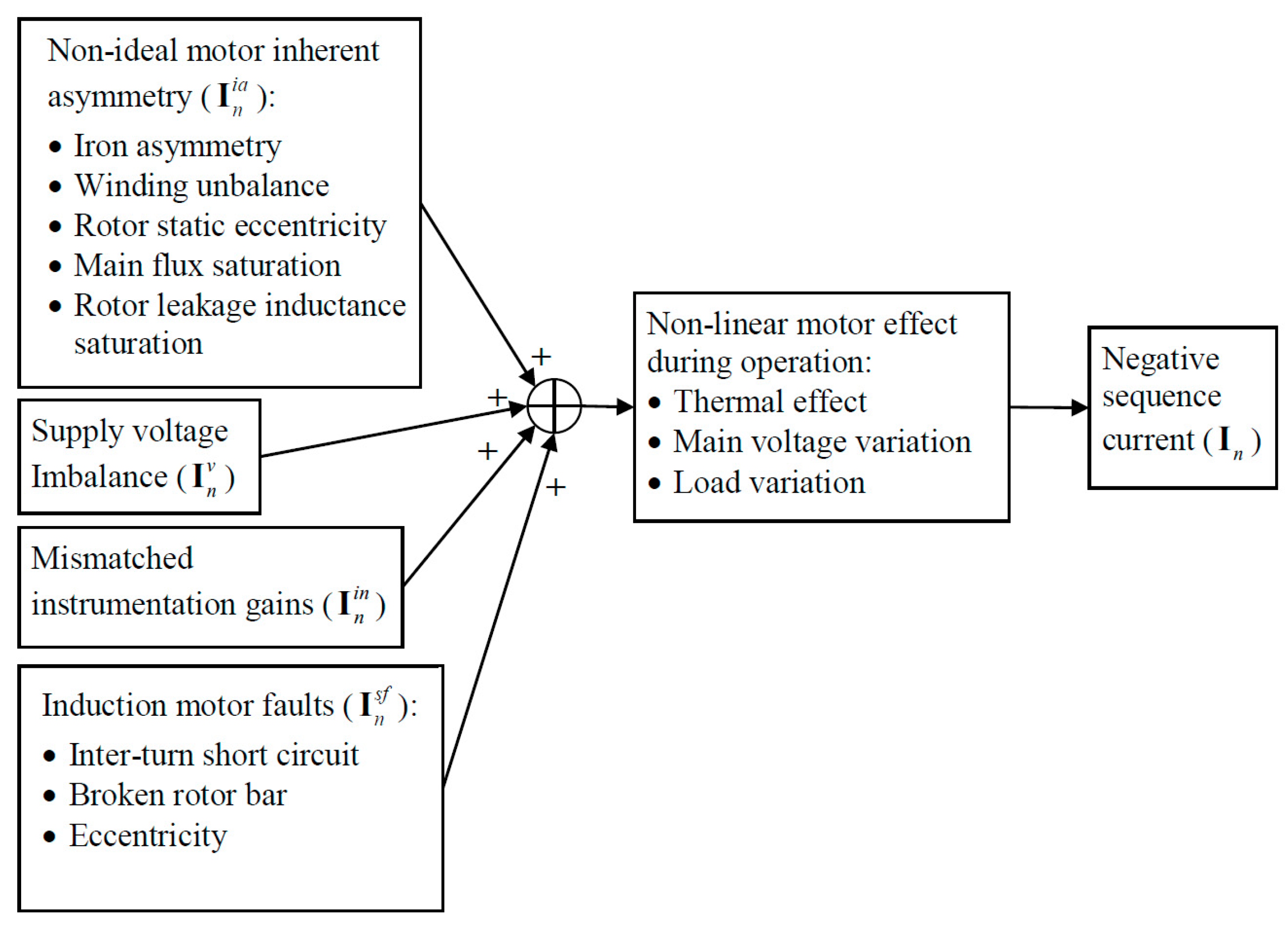
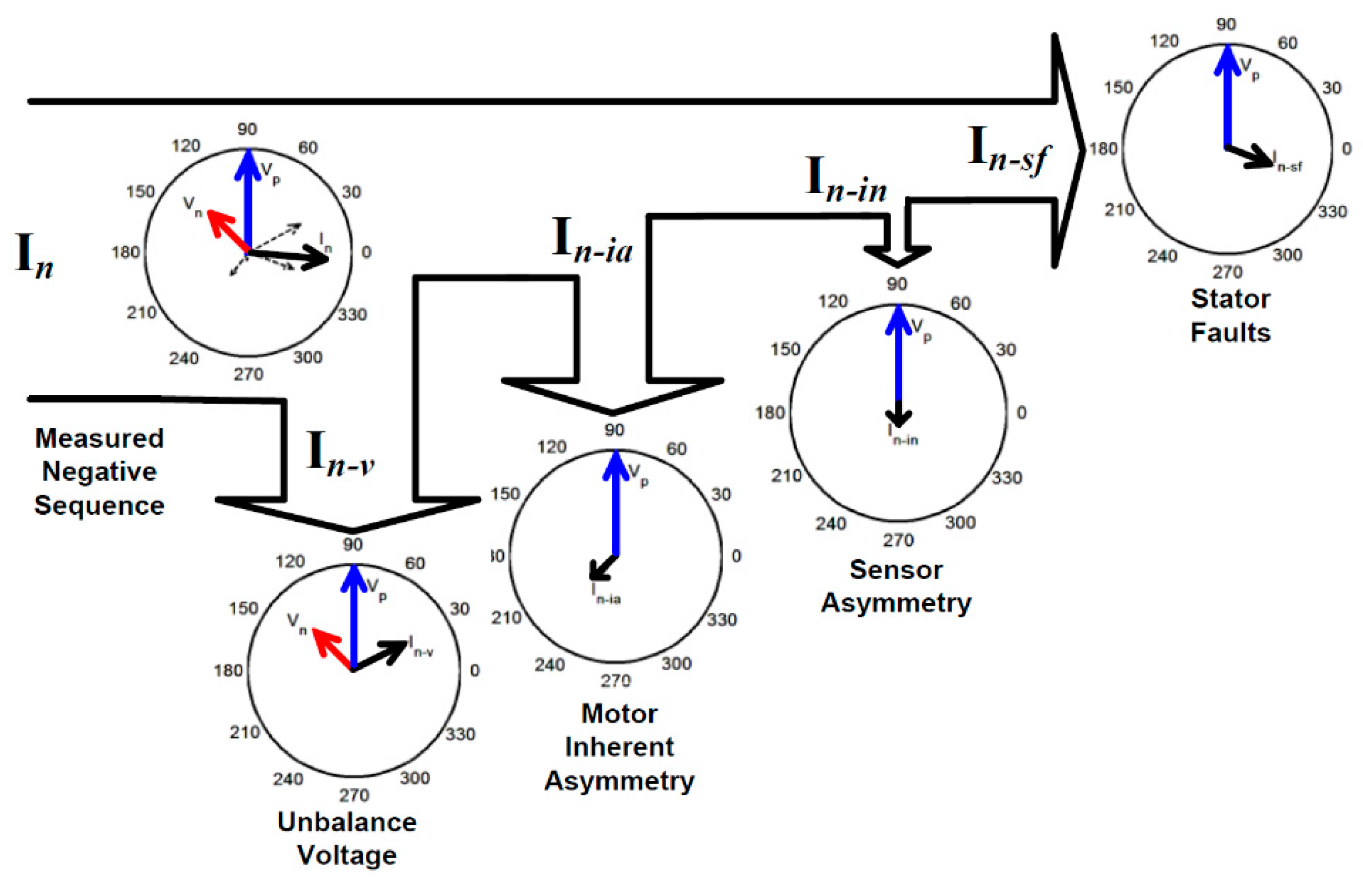
2.1. The Sources of Negative Sequence Current
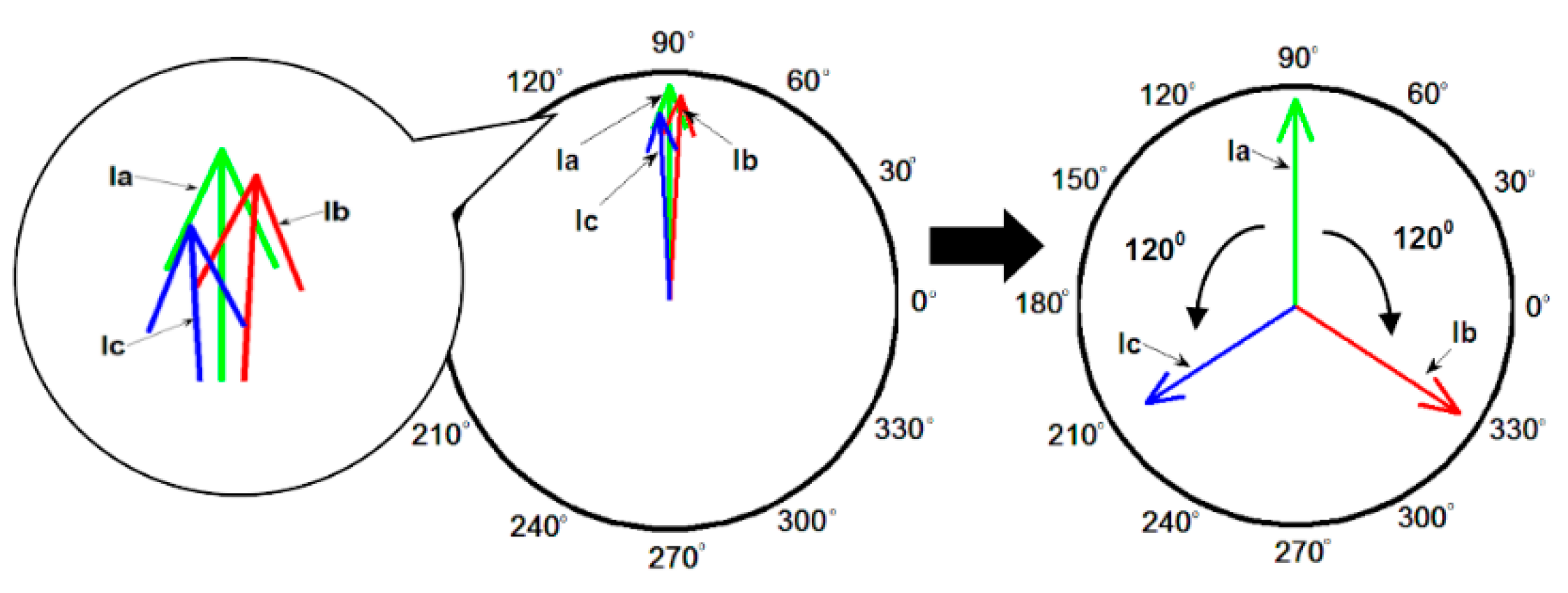
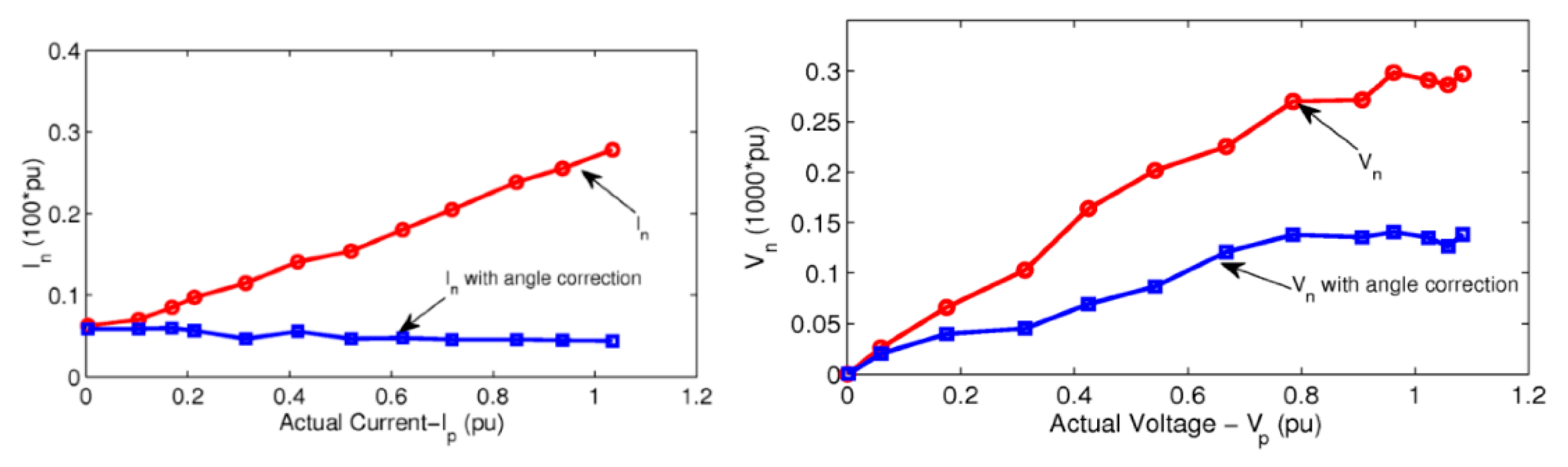
2.1.1. Measurement Asymmetry (In-in)
2.1.2. Inherent Asymmetry (In-ia)
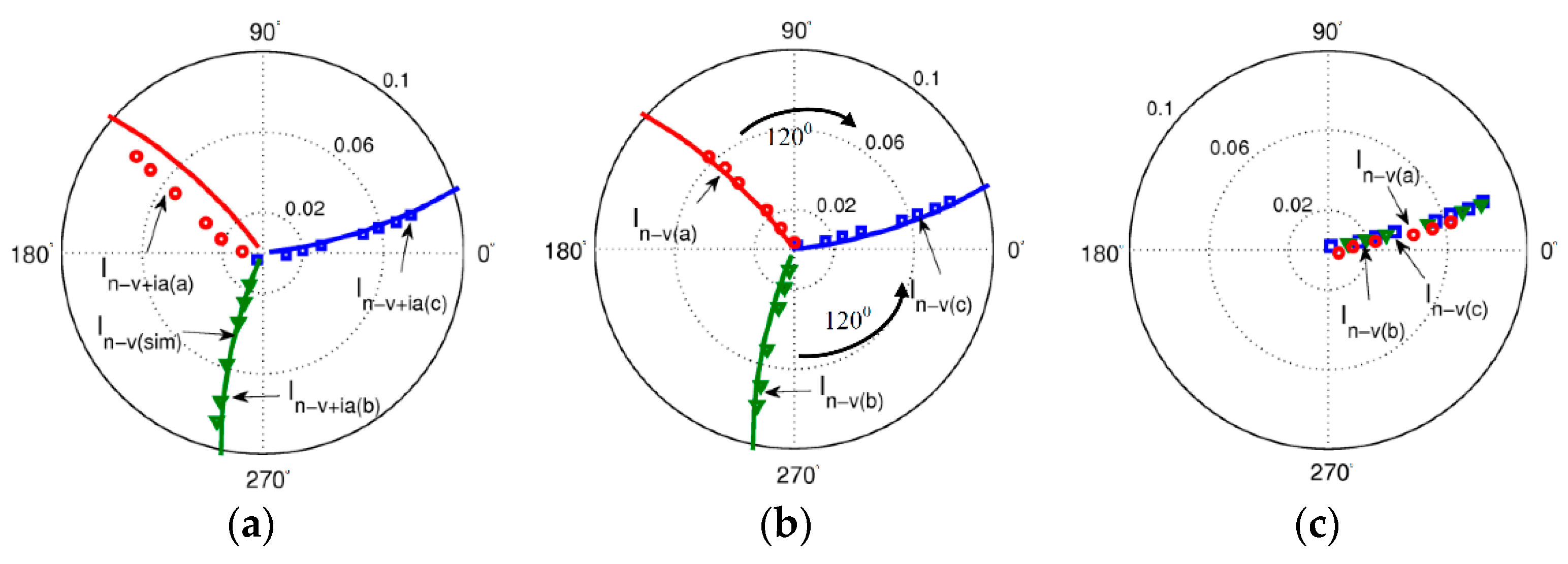
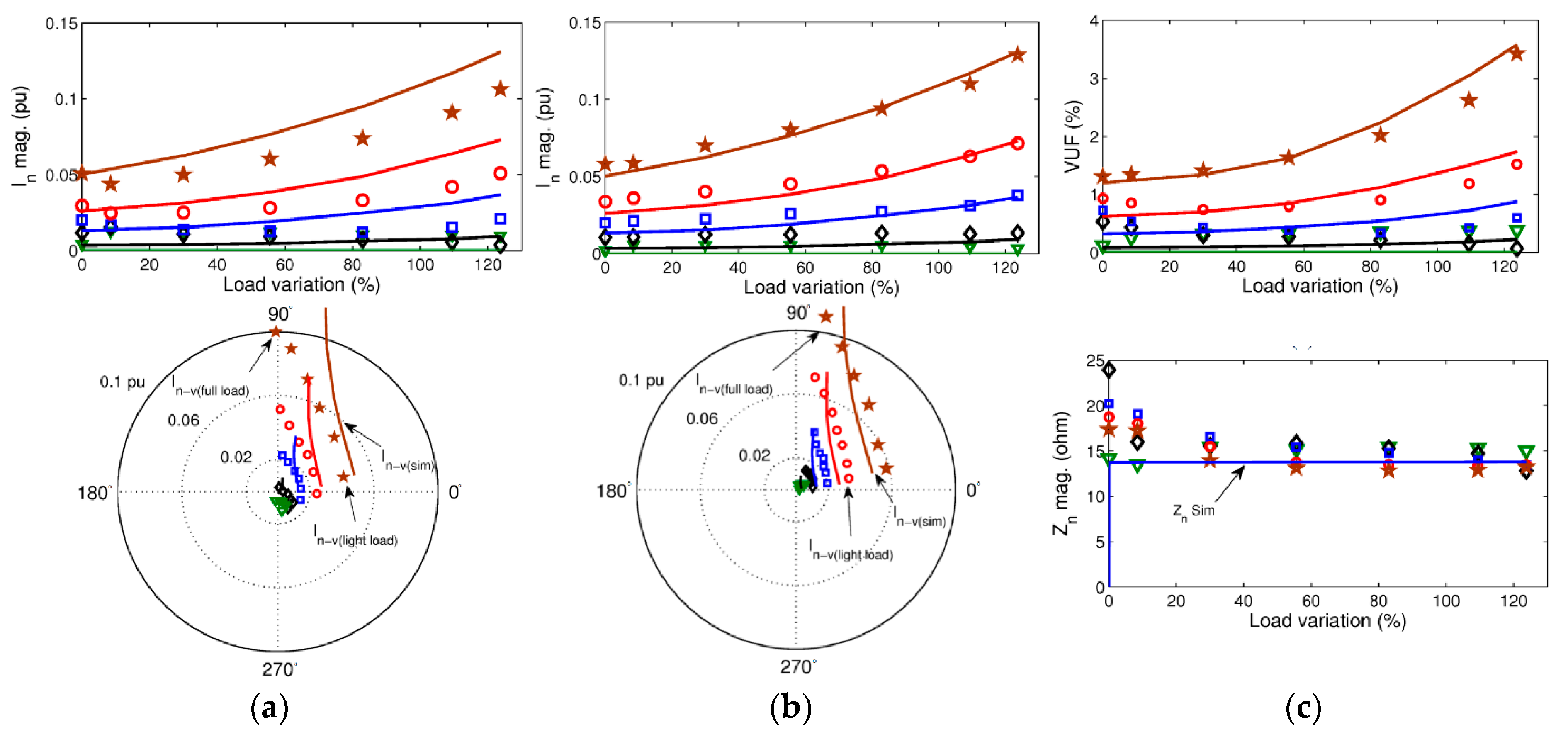
2.1.3. Voltage Unbalances (In-v)
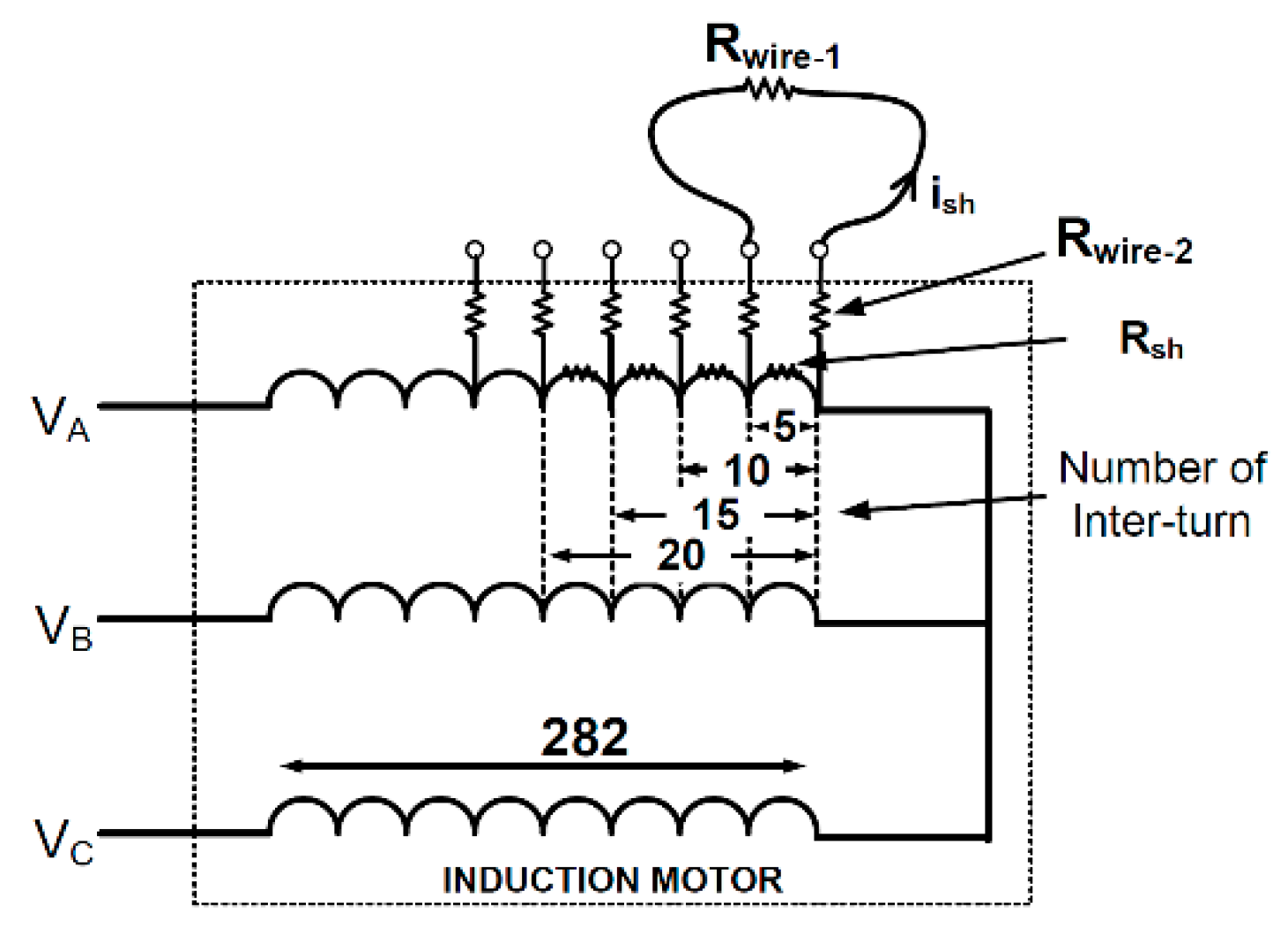
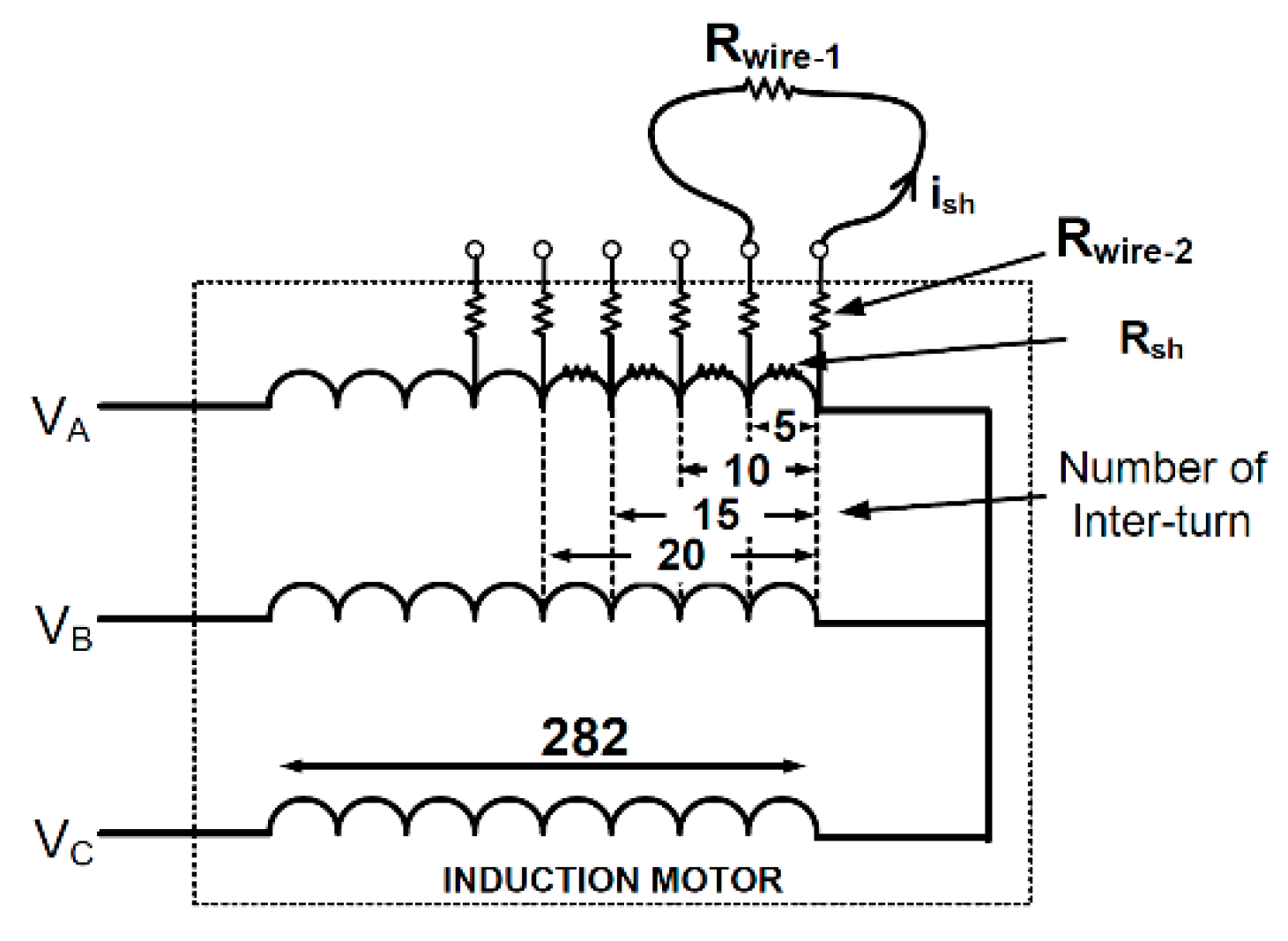
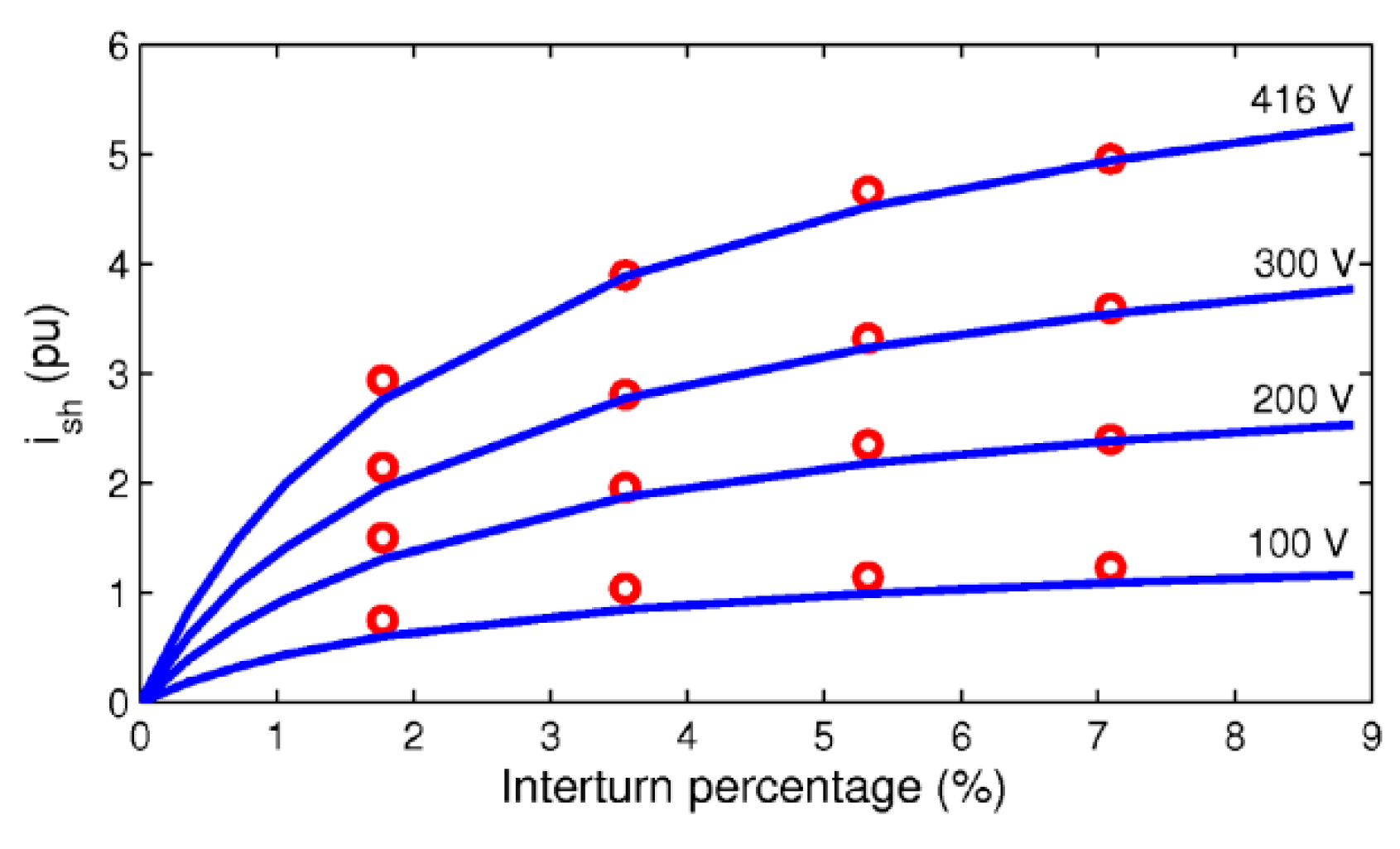
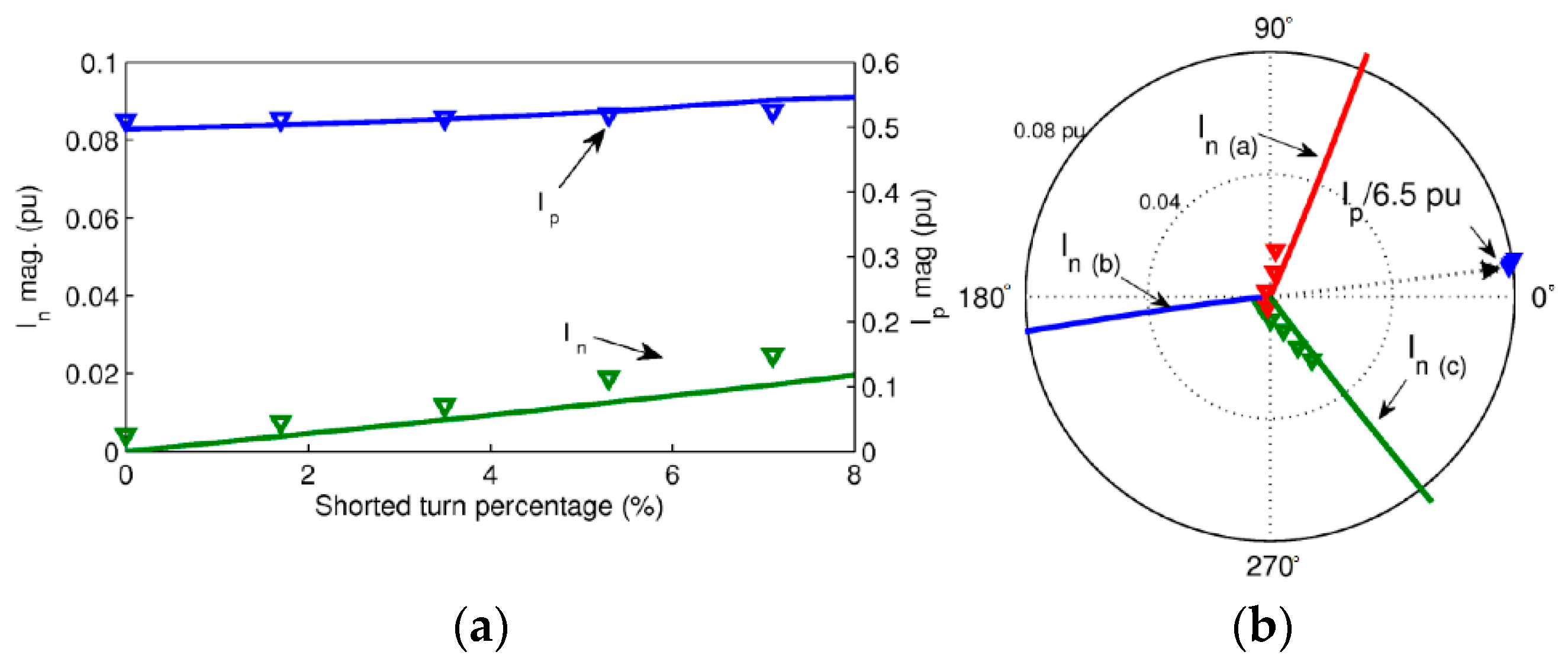
2.1.4. Induction Motor Faults (In-sf)
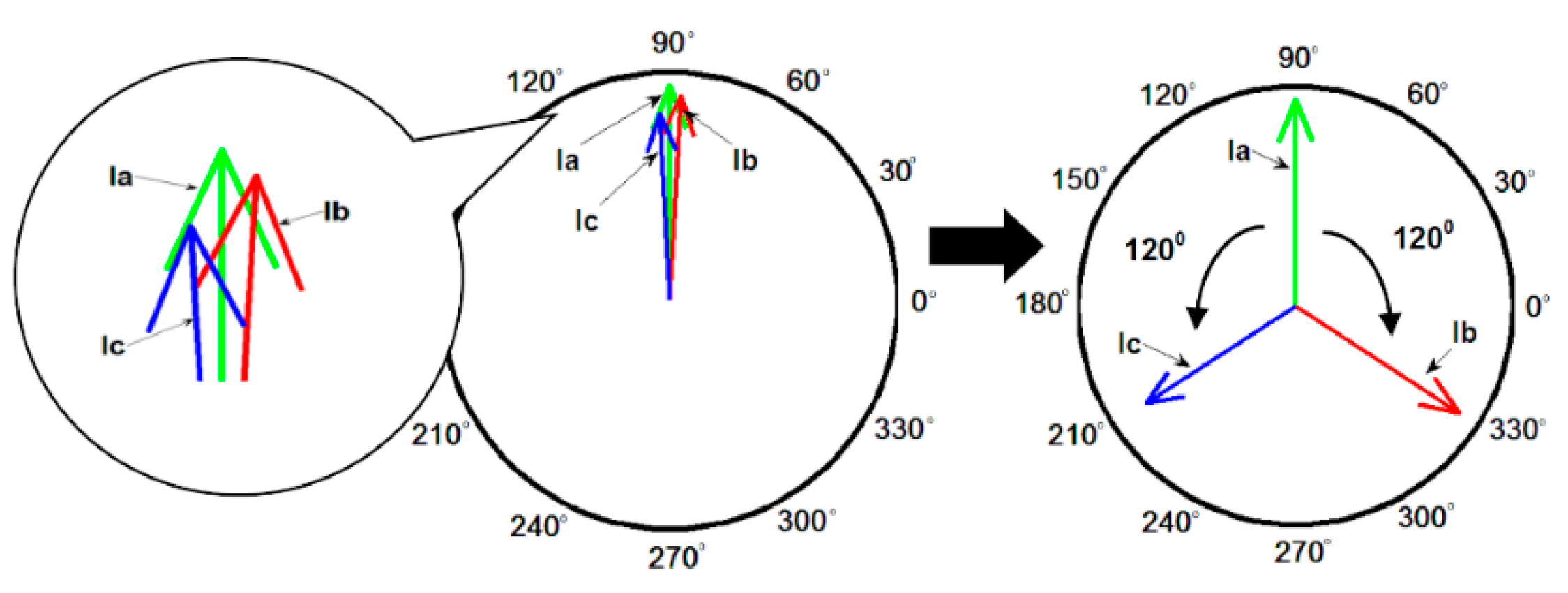
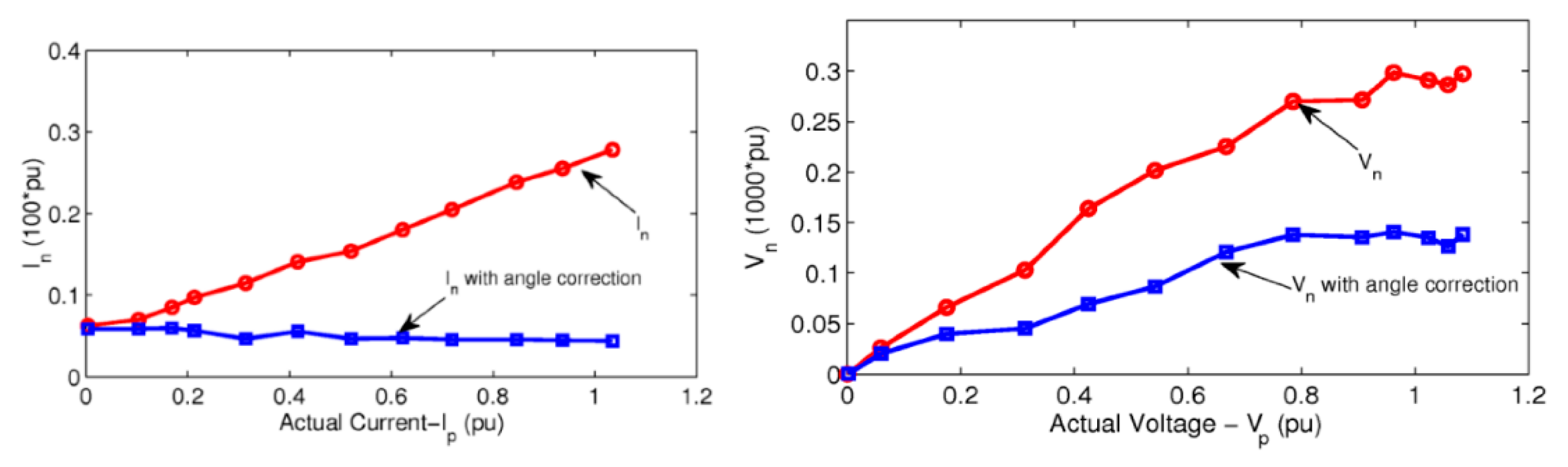
2.2. Principle of Phasor Compensation Technique
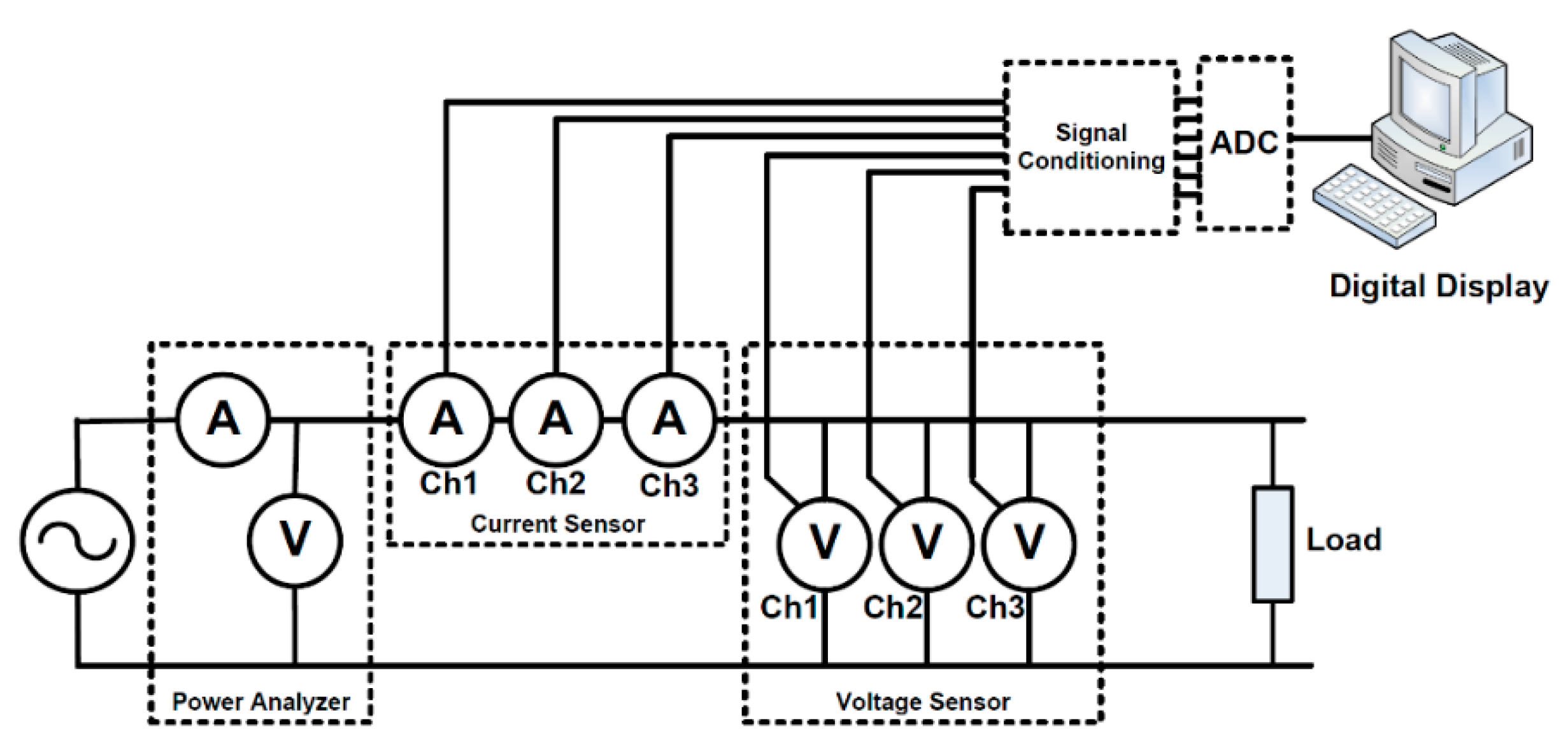
3. Simulation Study and Test Setup
4. System Calibration and Disturbances
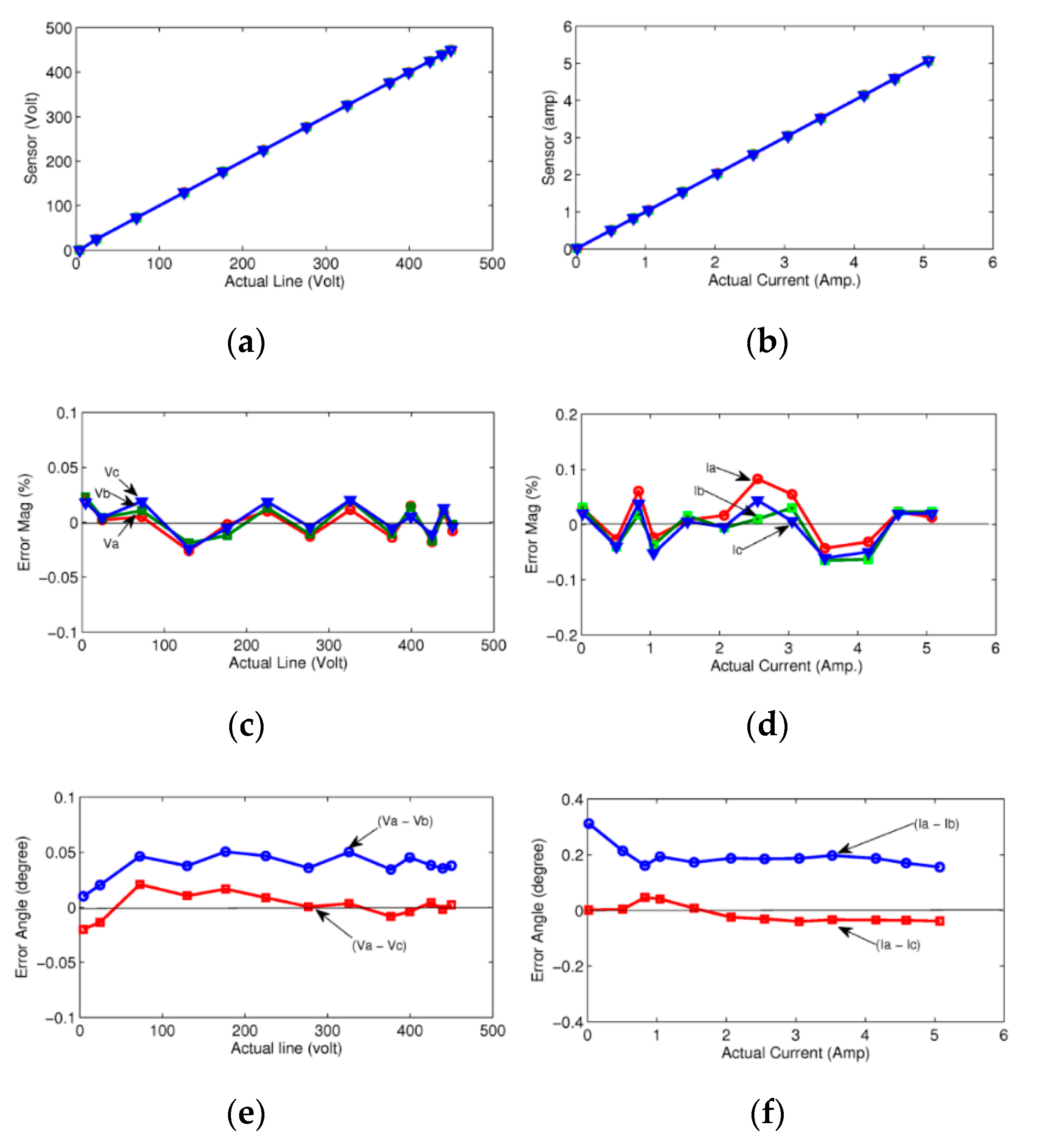
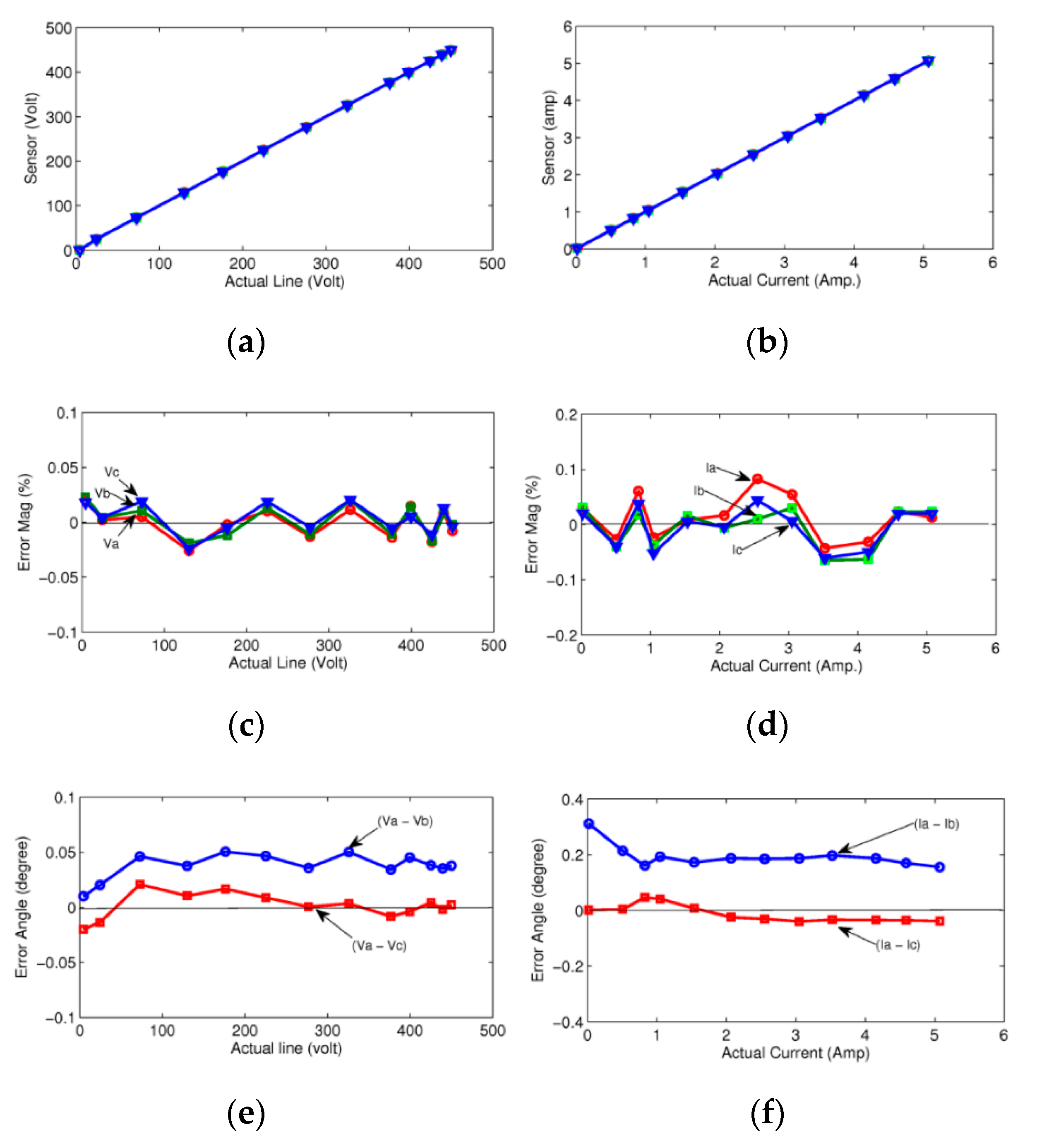
4.1. Sensor Calibration
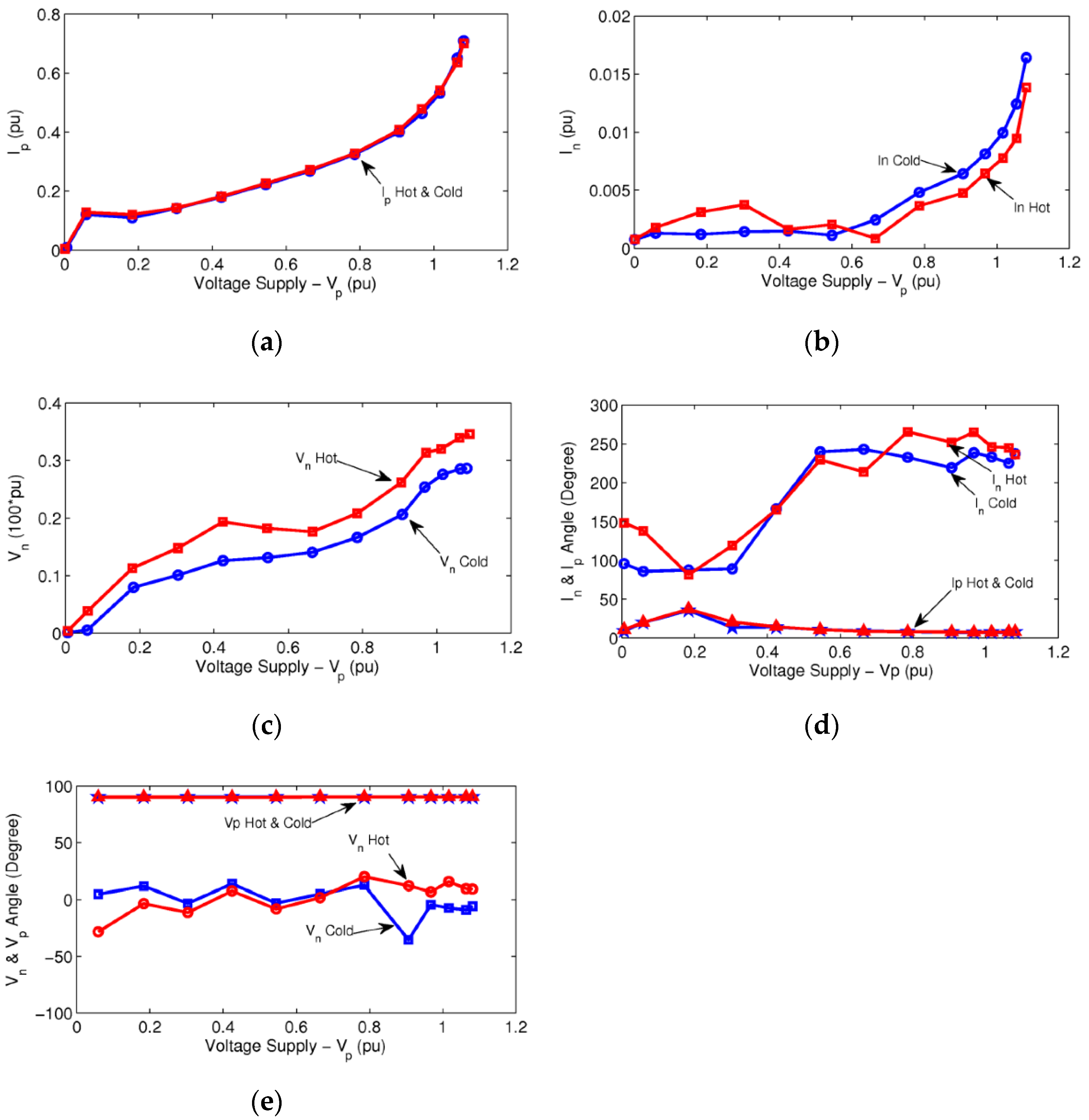
4.2. Motor Temperature
4.3. Voltage Unbalances
5. Shorted Turn Motor Fault and Novel Phasor Compensation Technique
5.1. Effect of Shorted Turn Fault
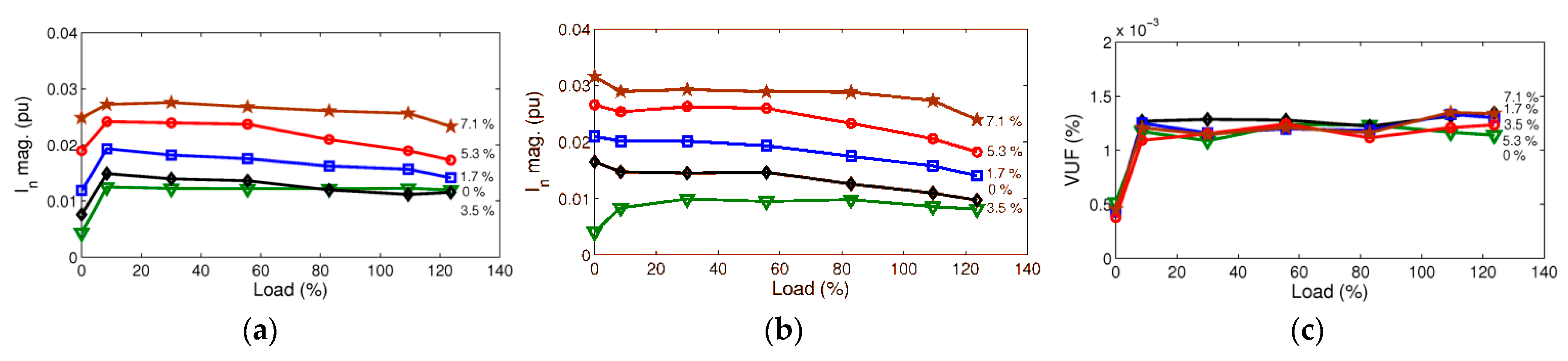
5.2. Shorted Turn Faults and Phasor Compensation
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Haines, G.; Ertugrul, N. Application Sensorless State and Efficiency Estimation for Integrated Motor Systems. In Proceedings of the 13th IEEE International Conference on Power Electronics and Drive Systems (PEDS 2019), Toulouse, France, 9–12 July 2019. [Google Scholar]
- Bakhri, S. Detailed Investigation of Negative Sequence Current Compensation Technique for Stator Shorted Turn Fault Detection of Induction Motors. Ph.D. Thesis, University of Adelaide, Adelaide, Australia, 2013. [Google Scholar]
- Supangat, R.; Grieger, J.; Ertugrul, N.; Soong, W.L.; Gray, D.A.; Hansen, C. Investigation of static eccentricity fault frequencies using multiple sensors in induction motors and effects of loading. In Proceedings of the IECON 2006-32nd Annual Conference on IEEE Industrial Electronics, Paris, France, 6–10 November 2006; pp. 958–963. [Google Scholar]
- Supangat, R.; Ertugrul, N.; Soong, W.L.; Gray, D.A.; Hansen, C.; Grieger, J. Broken rotor bar fault detection in induction motors using starting current analysis. In Proceedings of the 2005 European Conference on Power Electronics and Applications, Dresden, Germany, 11–14 September 2005. [Google Scholar]
- Grubic, S.; Aller, J.M.; Lu, B.; Habetler, T.G. A survey on testing and monitoring methods for stator insulation systems of low-voltage induction machines focusing on turn insulation problems. IEEE Trans. Ind. Electron. 2008, 55, 4127–4136. [Google Scholar] [CrossRef] [Green Version]
- Bakhri, S.; Ertugrul, N.; Soong, W.L.; Arkan, M. Investigation of negative sequence components for stator shorted turn detection in induction motors. In Proceedings of the Australasian Universities Power Engineering Conference (AUPEC), Christchurch, New Zealand, 5–8 December 2010; pp. 1–6. [Google Scholar]
- Arkan, M.; Perovic, D.K.; Unsworth, P. Online stator fault diagnosis in induction motors. IEE Proc. Electr. Power Appl. 2001, 148, 537–547. [Google Scholar] [CrossRef]
- Kliman, G.B.; Premerlani, W.J.; Koegl, R.A.; Hoeweler, D. Sensitive, on-line turn-to-turn fault detection in AC motors. Electr. Mach. Power Syst. 2000, 28, 915–927. [Google Scholar]
- Tallam, R.M.; Habetler, T.G.; Harley, R.G. Transient model for induction machines with stator winding turn faults. IEEE Trans. Ind. Appl. 2002, 38, 632–637. [Google Scholar] [CrossRef]
- Tallam, R.M.; Habetler, T.G.; Harley, R.G. Experimental testing of a neural-network-based turn-fault detection scheme for induction machines under accelerated insulation failure conditions. In Proceedings of the 4th IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives 2003 (SDEMPED 2003), Atlanta, GA, USA, 24–26 August 2003; IEEE: Piscataway, NJ, USA, 2003; pp. 58–62. [Google Scholar]
- Asfani, D.A.; Morel, J.; Purnomo, M.H.; Hiyama, T. Simulation and detection of temporary short circuit in induction motor windings using negative sequence current. In Proceedings of the 2011 International Conference on Advanced Power System Automation and Protection (APAP), Beijing, China, 16–20 October 2011; pp. 2304–2308. [Google Scholar]
- Bouzid, M.B.K.; Champenois, G. New Expressions of Symmetrical Components of the Induction Motor Under Stator Faults. IEEE Trans. Ind. Electron. 2013, 60, 4093–4102. [Google Scholar] [CrossRef]
- Mengoni, M.; Zarri, L.; Gritli, Y.; Tani, A.; Filippetti, F.; Lee, S.B. Online Detection of High-Resistance Connections with Negative-Sequence Regulators in Three-Phase Induction Motor Drives. IEEE Trans. Ind. Appl. 2015, 51, 1579–1586. [Google Scholar] [CrossRef]
- Lashkari, N.; Poshtan, J. Detection and discrimination of stator interturn fault and unbalanced supply voltage fault in induction motor using neural network. In Proceedings of the 6th 2015 Power Electronics, Drives Systems & Technologies Conference (PEDSTC), Tehran, Iran, 3–4 February 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 275–280. [Google Scholar]
- Bouzid, M.; Champenois, G. Experimental compensation of the negative sequence current for accurate stator fault detection in induction motors. In Proceedings of the Industrial Electronics Society, IECON 2013-39th Annual Conference of the IEEE, Vienna, Austria, 10–13 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 2804–2809. [Google Scholar]
- Kohler, J.L.; Sottile, J.; Trutt, F.C. Condition monitoring of stator windings in induction motors: Part I-Experimental investigation of the effective negative-sequence impedance detector. IEEE Trans. Ind. Appl. 2002, 38, 1447–1453. [Google Scholar] [CrossRef]
- Lee, S.B.; Tallam, R.M.; Habetler, T.G. A robust, on-line turn-fault detection technique for induction machines based on monitoring the sequence component impedance matrix. IEEE Trans. Power Electron. 2003, 18, 865–872. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Inherent Asymmetry | Voltage Unbalance | Load Variation | Shorted Turn Fault |
|---|---|---|---|---|
| [6] | Compensation of non-linearity (including inherent asymmetry) using look-up table | Negative sequence impedance Zn of motor (assumed independent load variation and turn faults) | Unaffected by load variation | Negative sequence current In-sf |
| [5] | Minimization of thermal effect by eliminating the current phase Isn = (Vn sin θn)/Xhn | Semi-empirical quadratic function of healthy reactance (Xhn) | Semi-empirical quadratic function of stator current under load variations | Negative sequence current |
| [7] | Complex constants (k) In = k1Vp + k2Vn | Complex constants (k) In = k1Vp + k2Vn | k1 and k2 are load dependent | Negative sequence current In-sf |
| [10,13] | Calculated from two current sensors based-method Ia and Ib; Negative sequence due to uncalibrated sensor is also considered | Voltage unbalance supply is not considered | Tested under no-load, half load and full load | Negative sequence current In-sf |
| [8,12] | Neural network | Neural network | Neural network | Negative sequence current In-sf |
| [14] | Need to be perfectly balanced | Need a balanced voltage supply | Load is not affected | Effective negative sequence impedance: Zn-eff = Vn/In |
| [15] | Independent of inherent asymmetry | Independent of voltage unbalance | Calculation under speed variation | Negative sequence impedance matrix Znp |
| [11] | Proportional integral (PI) controller. The PI negative sequence regulator is not intended for monitoring | PI controller | PI controller | Not available |
| Rated output power | 2.2 kW | Referred rotor resistance | 4.65 ohm |
| Rated frequency | 50 Hz | Stator leakage inductance | 14.8 mH |
| Line voltage | 415 V | Referred rotor leakage inductance | 14.8 mH |
| Rated stator current | 4.9 A | Rotor inertia | 0.05 kg m2 |
| Number of series turns/phase | 282 turns | Magnetizing inductance | 312 mH |
| No. of poles | 4 | Rated power factor | 0.8 lag |
| Stator phase winding resistance | 5.22 ohm | Rated speed | 1415 rpm |
| Channel | Voltage | Current |
|---|---|---|
| A | y = 2.4 × 10−5 + 8.84 × 10−3x | y = −4.93 × 10−5 + 0.489x |
| B | y = 1.1 × 10−3 + 8.88 × 10−3x | y = −8.19 × 10−5 + 0.490x |
| C | y = 4.6 × 10−4 + 8.93 × 10−3x | y = −1.07 × 10−4 + 0.488x |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bakhri, S.; Ertugrul, N. A Negative Sequence Current Phasor Compensation Technique for the Accurate Detection of Stator Shorted Turn Faults in Induction Motors. Energies 2022, 15, 3100. https://doi.org/10.3390/en15093100
Bakhri S, Ertugrul N. A Negative Sequence Current Phasor Compensation Technique for the Accurate Detection of Stator Shorted Turn Faults in Induction Motors. Energies. 2022; 15(9):3100. https://doi.org/10.3390/en15093100
Chicago/Turabian StyleBakhri, Syaiful, and Nesimi Ertugrul. 2022. "A Negative Sequence Current Phasor Compensation Technique for the Accurate Detection of Stator Shorted Turn Faults in Induction Motors" Energies 15, no. 9: 3100. https://doi.org/10.3390/en15093100
APA StyleBakhri, S., & Ertugrul, N. (2022). A Negative Sequence Current Phasor Compensation Technique for the Accurate Detection of Stator Shorted Turn Faults in Induction Motors. Energies, 15(9), 3100. https://doi.org/10.3390/en15093100