
Torque Enhancement Principle of Stator PM Vernier Machine by Consequent Pole Structure


Abstract
:1. Introduction
2. Torque Enhancement Principle
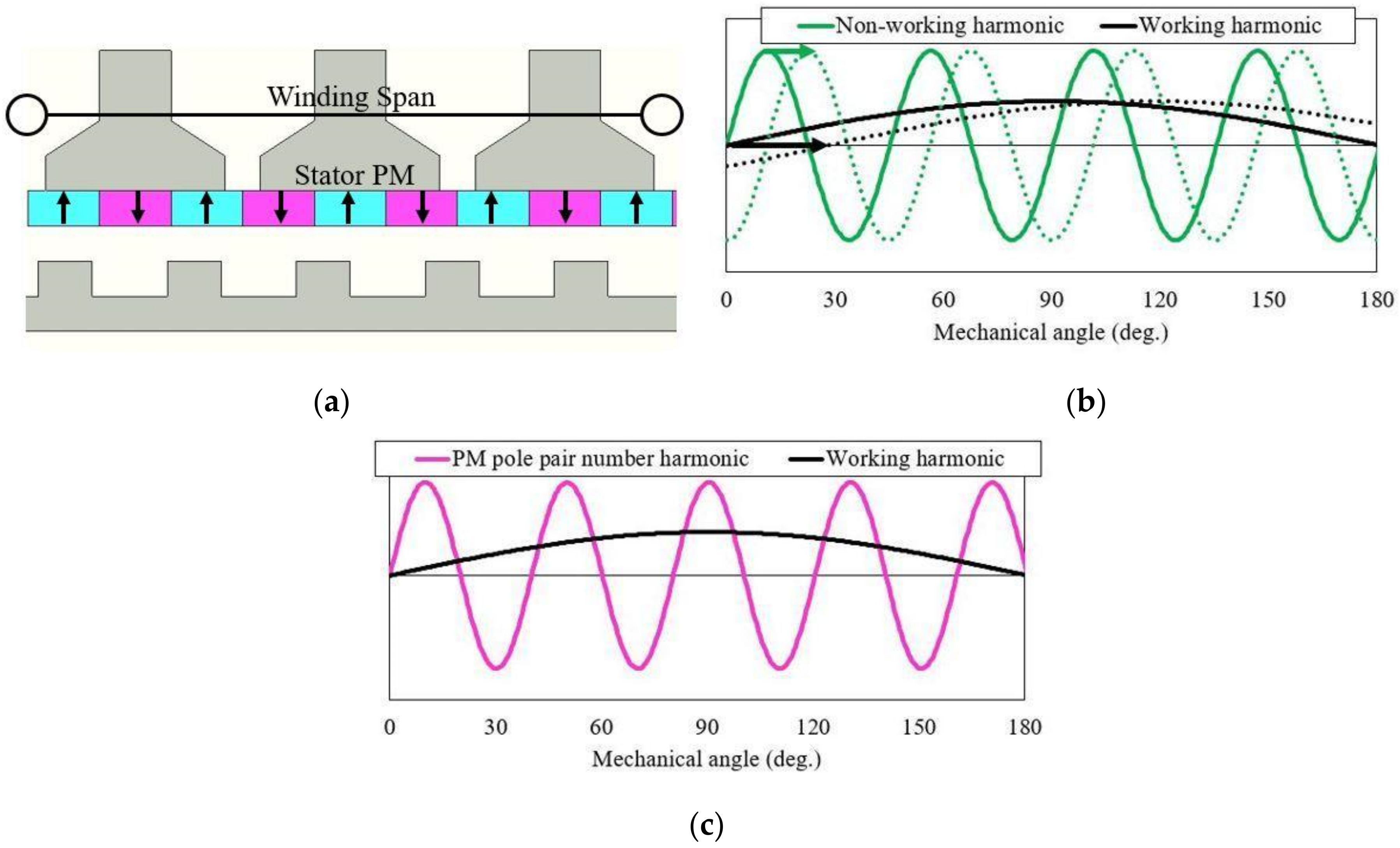
2.1. Torque Production
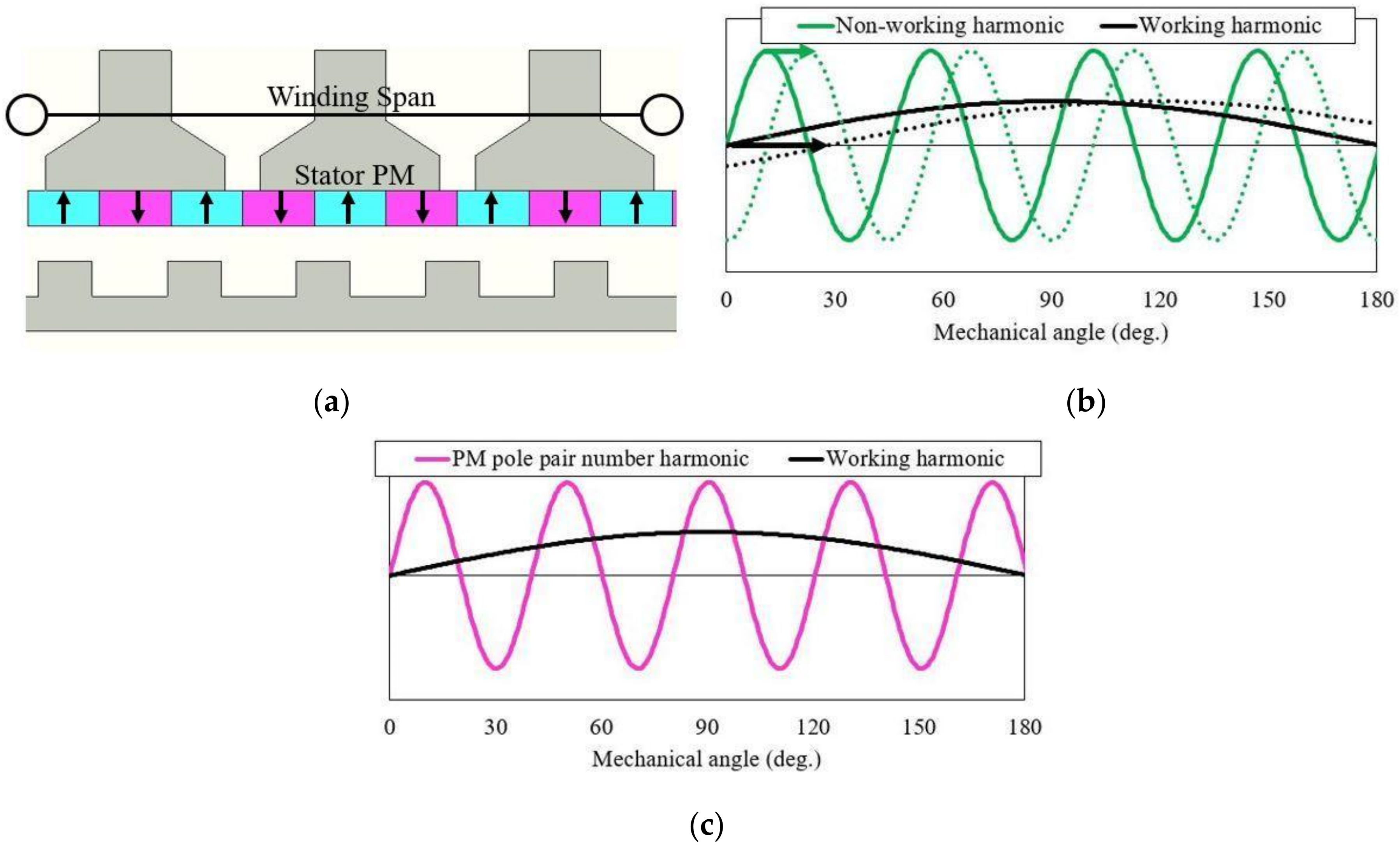
2.2. Working Harmonic Contribution Analysis
2.3. Torque Enhancement
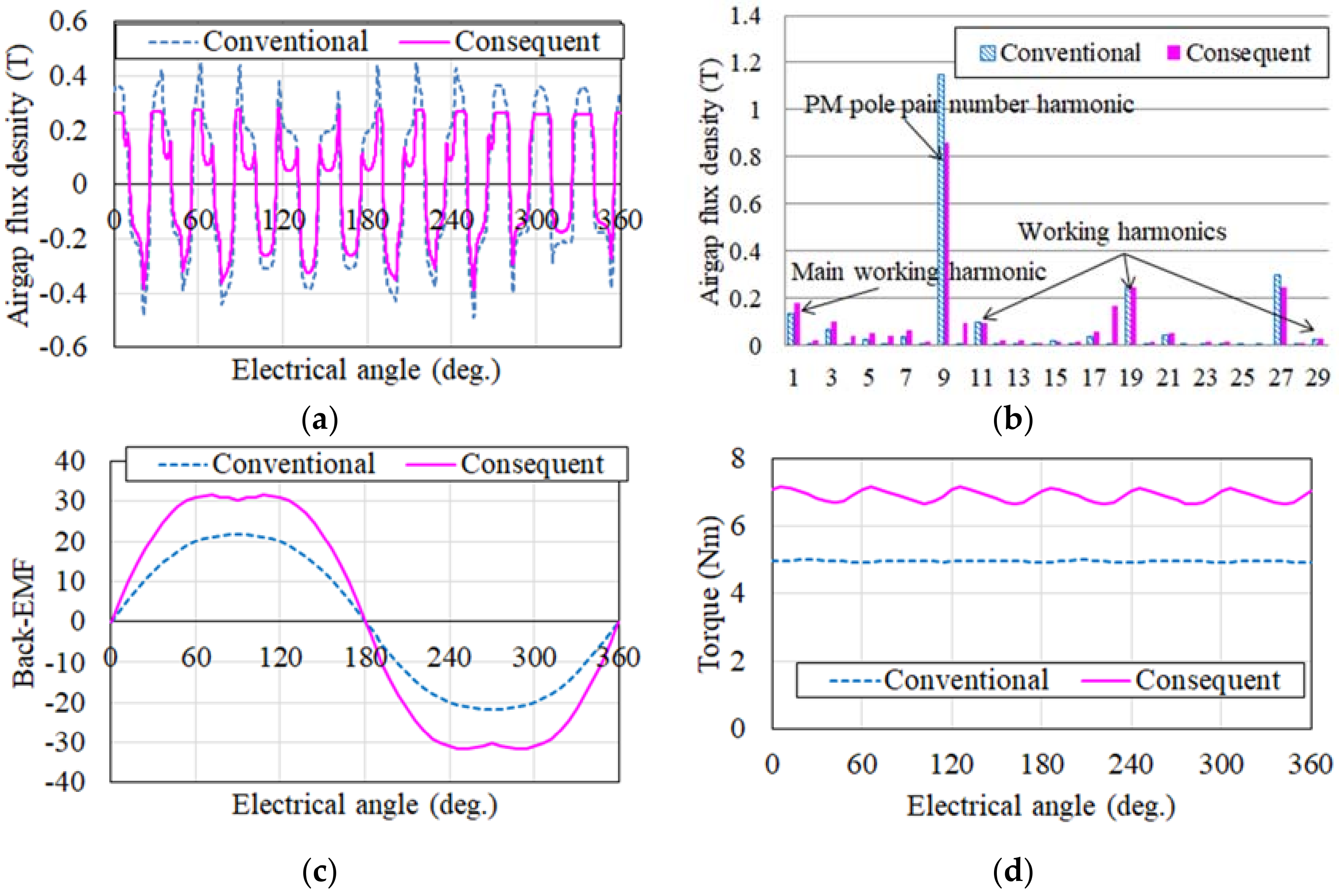
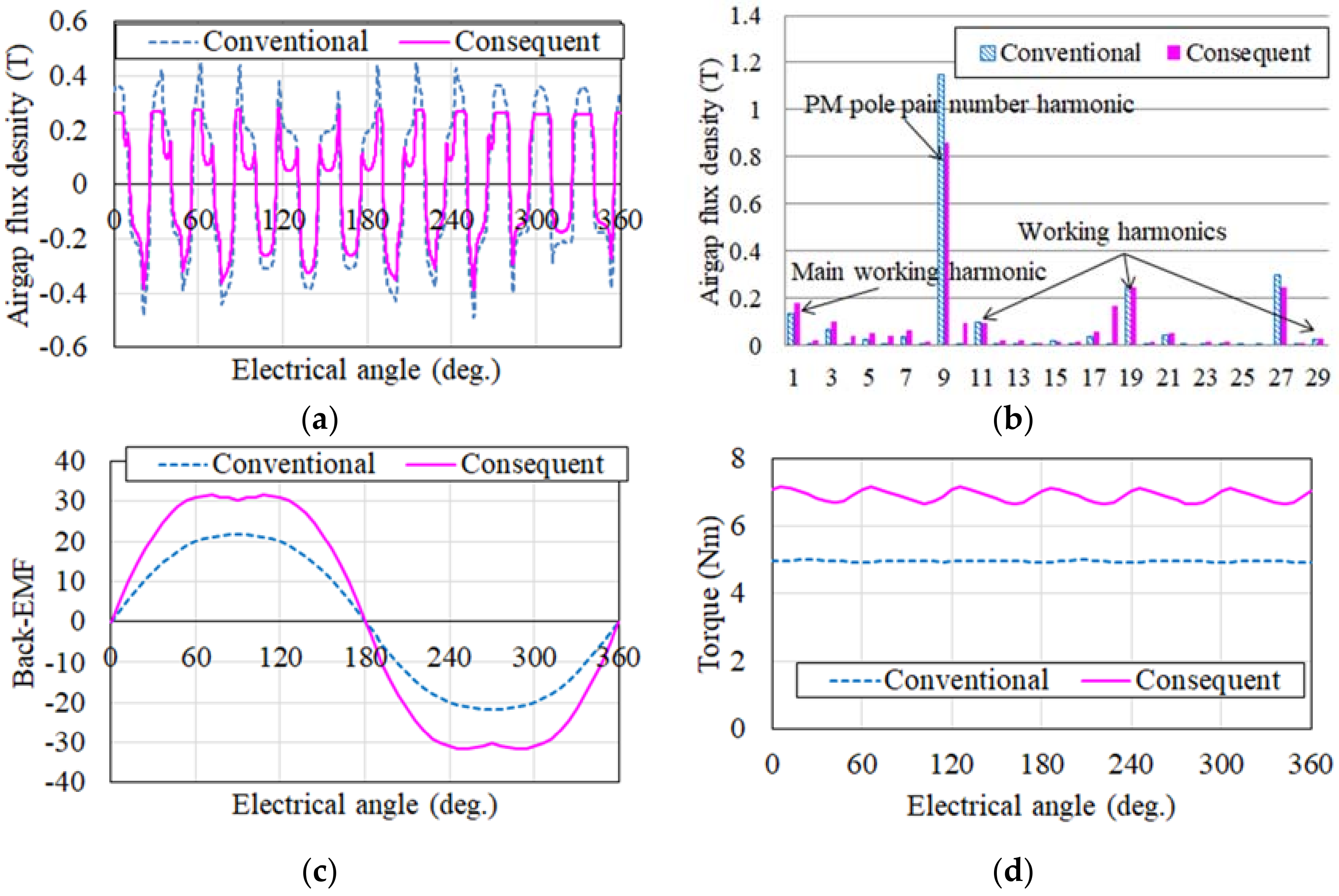
3. Principle Verification
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wu, F.; El-Refaie, A.M. Permanent magnet vernier machine: A review. IET Electr. Power Appl. 2019, 13, 127–137. [Google Scholar] [CrossRef]
- Li, J.; Chau, K.T.; Jiang, J.Z.; Liu, C.; Li, W. A New Efficient Permanent-Magnet Vernier Machine for Wind Power Generation. IEEE Trans. Magn. 2010, 46, 1475–1478. [Google Scholar] [CrossRef]
- Jang, D.; Chang, J.H. Design of a Vernier Machine with PM on Both Sides of Rotor and Stator. IEEE Trans. Magn. 2014, 50, 877–880. [Google Scholar] [CrossRef]
- Shi, C.; Li, D.; Qu, R.; Zhang, H.; Gao, Y.; Huo, Y. A Novel Linear Permanent Magnet Vernier Machine with Consequent-Pole Permanent Magnets and Halbach Permanent Magnet Arrays. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Baloch, N.; Kwon, B.-I.; Gao, Y. Low-Cost High-Torque-Density Dual-Stator Consequent-Pole Permanent Magnet Vernier Machine. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Gorginpour, H. Dual-stator consequent-pole Vernier PM motor with improved power factor. IET Electr. Power Appl. 2019, 13, 652–661. [Google Scholar] [CrossRef]
- Chung, S.-U.; Kim, J.-W.; Woo, B.-C.; Hong, D.-K.; Lee, J.-Y.; Koo, D.-H. A Novel Design of Modular Three-Phase Permanent Magnet Vernier Machine with Consequent Pole Rotor. IEEE Trans. Magn. 2011, 47, 4215–4218. [Google Scholar] [CrossRef]
- Toba, A.; Lipo, T.A. Generic torque-maximizing design methodology of surface permanent-magnet vernier machine. IEEE Trans. Ind. Appl. 2000, 36, 1539–1546. [Google Scholar]
- Cheng, M.; Chau, K.T.; Chan, C.C. Static characteristics of a new doubly salient permanent magnet motor. IEEE Trans. Energy Convers. 2001, 16, 20–25. [Google Scholar] [CrossRef] [Green Version]
- Chau, K.T.; Sun, Q.; Fan, Y.; Cheng, M. Torque Ripple Minimization of Doubly Salient Permanent-Magnet Motors. IEEE Trans. Energy Convers. 2005, 20, 352–358. [Google Scholar] [CrossRef] [Green Version]
- More, D.S.; Fernandes, B.G. Analysis of Flux-Reversal Machine Based on Fictitious Electrical Gear. IEEE Trans. Energy Convers. 2010, 25, 940–947. [Google Scholar] [CrossRef]
- Gao, Y.; Qu, R.; Li, D.; Li, J.; Huo, Y. Design and analysis of a novel flux reversal machine. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–8. [Google Scholar]
- Kim, T.H.; Lee, J. A Study of the Design for the Flux Reversal Machine. IEEE Trans. Magn. 2004, 40, 2053–2055. [Google Scholar] [CrossRef]
- Chen, J.T.; Zhu, Z.Q. Winding Configurations and Optimal Stator and Rotor Pole Combination of Flux-Switching PM Brushless AC Machines. IEEE Trans. Energy Convers. 2009, 25, 293–302. [Google Scholar] [CrossRef]
- Hua, W.; Cheng, M.; Zhu, Z.; Howe, D. Analysis and Optimization of Back EMF Waveform of a Flux-Switching Permanent Magnet Motor. IEEE Trans. Energy Convers. 2008, 23, 727–733. [Google Scholar] [CrossRef]
- Chen, J.T.; Zhu, Z.Q.; Iwasaki, S.; Deodhar, R. A novel E-core flux-switching PM brushless AC machine. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010; pp. 3811–3818. [Google Scholar]
- Shao, L.; Hua, W.; Zhu, Z.Q.; Zhu, X.; Cheng, M.; Wu, Z. A Novel Flux-Switching Permanent Magnet Machine with Overlapping Windings. IEEE Trans. Energy Convers. 2016, 32, 172–183. [Google Scholar] [CrossRef]
- Liu, X.; Zou, C.; Du, Y.; Xiao, F. A linear consequent pole stator permanent magnet vernier machine. In Proceedings of the 2014 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014. [Google Scholar]
- Tao, W.; Zhou, H.; Liu, G. A Novel Stator-PM Vernier Fault-Tolerant Machine with Consequent Pole Structure. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019. [Google Scholar]
- Jia, S.; Qu, R.; Li, J.; Li, D.; Kong, W. A Stator-PM Consequent-Pole Vernier Machine with Hybrid Excitation and DC-Biased Sinusoidal Current. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Yang, H.; Zhu, Z.Q.; Lin, H.; Li, H.Y.; Lyu, S. Analysis of Consequent-Pole Flux Reversal Permanent Magnet Machine with Biased Flux Modulation Theory. IEEE Trans. Ind. Electron. 2020, 67, 2107–2121. [Google Scholar] [CrossRef]
- Botha, C.D.; Kamper, M.J.; Wang, R.-J.; Chama, A. Analytical Modeling of Surface-Mounted and Consequent-Pole Linear Vernier Hybrid Machines. IEEE Access 2021, 9, 26251–26259. [Google Scholar] [CrossRef]
- Almoraya, A.A.; Baker, N.J.; Smith, K.J.; Raihan, M.A.H. Development of a double-sided consequent pole linear vernier hybrid permanent-magnet machine for wave energy converters. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017. [Google Scholar]
- Botha, C.; Kamper, M.; Wang, R.-J.; Sorgdrager, A. Force Ripple and Cogging Force Minimisation Criteria of Single-Sided Consequent-Pole Linear Vernier Hybrid Machines. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020; Volume 1. [Google Scholar]
- Liu, W.; Lipo, T.A. Analysis of Consequent Pole Spoke Type Vernier Permanent Magnet Machine with Alternating Flux Barrier Design. IEEE Trans. Ind. Appl. 2018, 54, 5918–5929. [Google Scholar] [CrossRef]
- Yang, H.; Lin, H.; Zhu, Z.-Q.; Fang, S.; Huang, Y. A Dual-Consequent-Pole Vernier Memory Machine. Energies 2016, 9, 134. [Google Scholar] [CrossRef]
- Li, D.; Qu, R.; Li, J.; Xu, W. Consequent-Pole Toroidal-Winding Outer-Rotor Vernier Permanent-Magnet Machines. IEEE Trans. Ind. Appl. 2015, 51, 4470–4481. [Google Scholar] [CrossRef]
- Heller, B.; Hamata, V. Harmonic Field Effects in Induction Machines; Elsevier: Amsterdam, The Netherlands, 1977. [Google Scholar]
- Li, D.; Qu, R.; Li, J.; Xu, W.; Wu, L. Synthesis of Flux Switching Permanent Magnet Machines. IEEE Trans. Energy Convers. 2015, 31, 106–117. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Howe, D. Instantaneous magnetic field distribution in brushless permanent magnet DC motors. III. Effect of stator slotting. IEEE Trans. Magn. 1993, 29, 143–151. [Google Scholar] [CrossRef]
- Li, Y.; Yang, H.; Lin, H. Comparative Study of Torque Production Mechanisms in Stator and Rotor Consequent-Pole Permanent Magnet Machines. IEEE Trans. Transp. Electrif. 2021, 7, 2694–2704. [Google Scholar] [CrossRef]
- Kim, B. Design of a PM Vernier Machine with Consideration for Modulation Flux and Comparison with Conventional PM motors. Energies 2017, 10, 1819. [Google Scholar] [CrossRef] [Green Version]
- Li, D.; Qu, R.; Li, J. Topologies and analysis of flux-modulation machines. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015. [Google Scholar]
- Zou, T.; Li, D.; Chen, C.; Qu, R.; Jiang, D. A Multiple Working Harmonic PM Vernier Machine with Enhanced Flux-Modulation Effect. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Zou, T.; Li, D.; Qu, R.; Jiang, D.; Li, J. Advanced High Torque Density PM Vernier Machine with Multiple Working Harmonics. IEEE Trans. Ind. Appl. 2017, 53, 5295–5304. [Google Scholar] [CrossRef]
- Allahyari, A.; Torkaman, H. A Novel High-Performance Consequent Pole Dual Rotor Permanent Magnet Vernier Machine. IEEE Trans. Energy Convers. 2020, 35, 1238–1246. [Google Scholar] [CrossRef]
- Du, Y.; Chau, K.T.; Cheng, M.; Fan, Y.; Wang, Y.; Hua, W.; Wang, Z. Design and Analysis of Linear Stator Permanent Magnet Vernier Machines. IEEE Trans. Magn. 2011, 47, 4219–4222. [Google Scholar] [CrossRef]
- Liu, G.; Yang, J.; Zhao, W.; Ji, J.; Chen, Q.; Gong, W. Design and Analysis of a New Fault-Tolerant Permanent-Magnet Vernier Machine for Electric Vehicles. IEEE Trans. Magn. 2012, 48, 4176–4179. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
| Harmonic Order | Magnitude | Speed |
|---|---|---|
| = | ||
| Harmonic Order | Magnitude | Speed |
|---|---|---|
| Item | Unit | Value |
|---|---|---|
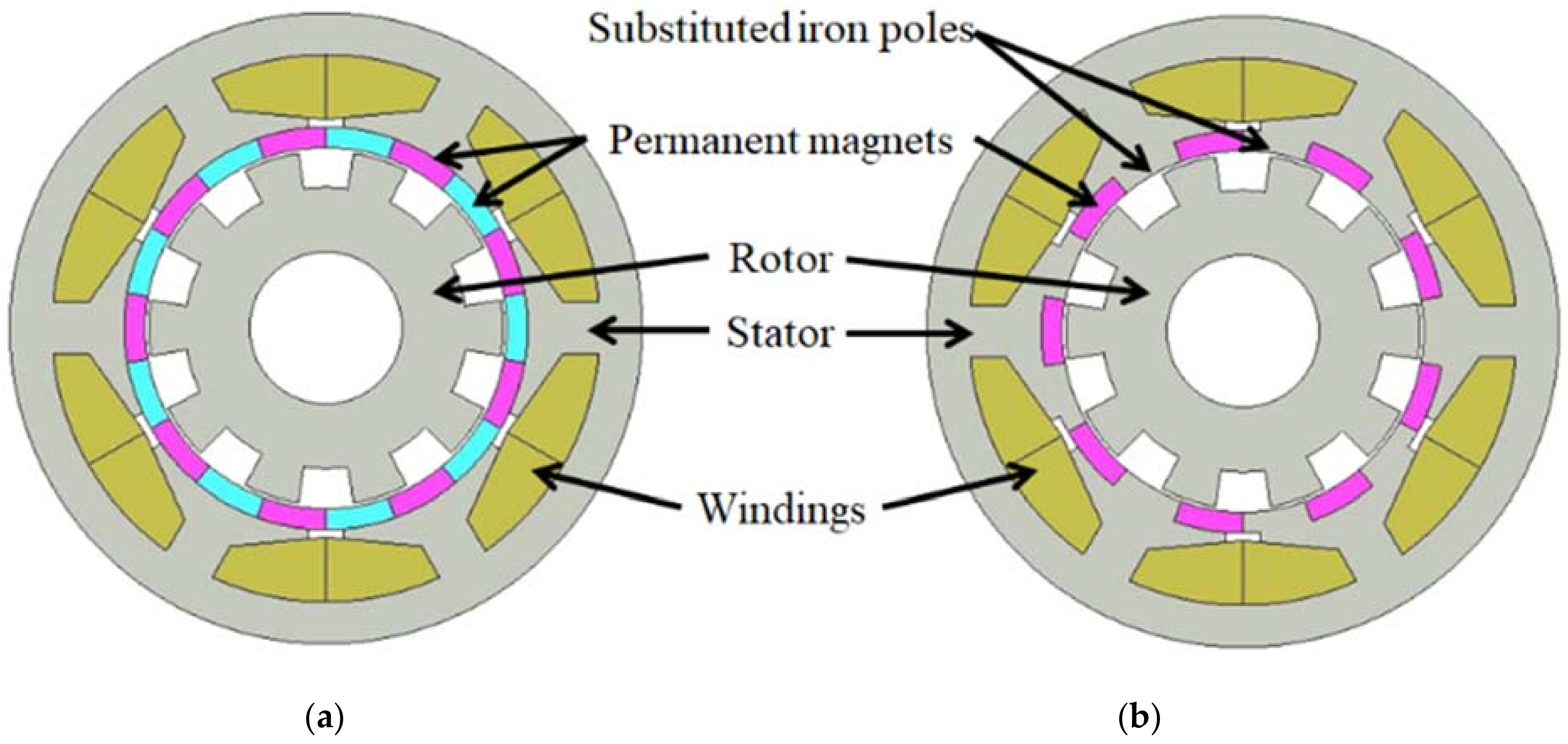
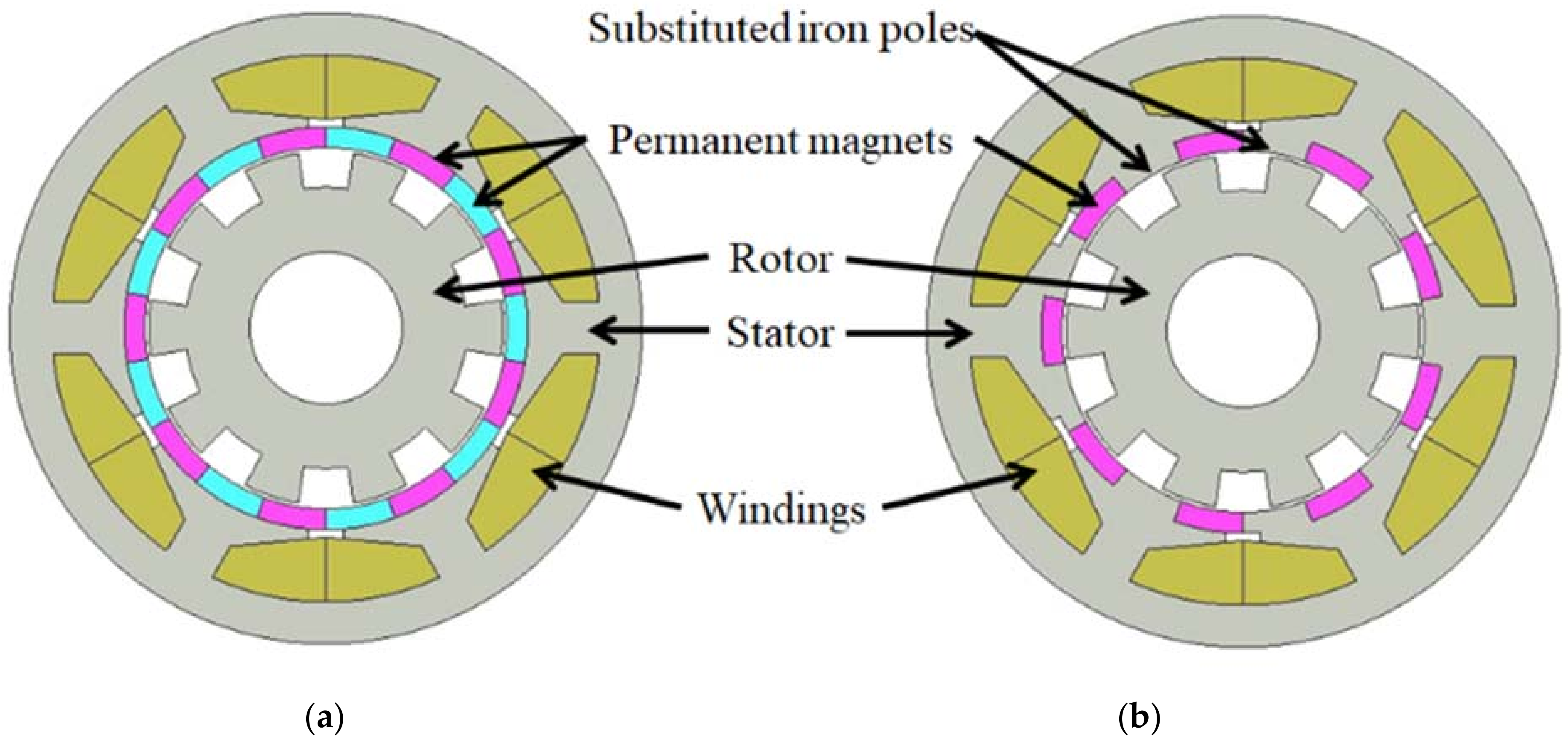
| Stator slot | - | 6 |
| Rotor pole pair | - | 10 |
| Stator pole pair | - | 9 |
| Armature pole pair | - | 1 |
| Stator outer diameter | mm | 166 |
| Stator inner diameter | mm | 106 |
| Rotor outer diameter | mm | 92 |
| Thickness of magnet | mm | 6 |
| Stack length | mm | 90 |
| Airgap length | mm | 1 |
| Turns per phase | - | 100 |
| Material of stator and rotor core | - | 35H440 |
| Material of magnet | - | NdFeB |
| Item | Unit | Conventional | Consequent |
|---|---|---|---|
| = | % | 77.6 | 116.4 |
| % | 28.4 | 27 | |
| % | −27.7 | −51.8 | |
| % | 7.1 | 6.7 |
| Item | Unit | Conventional | Consequent |
|---|---|---|---|
| Back EMF | V | 16.2 | 25.2 |
| Average torque | Nm | 4.95 | 6.88 |
| PM volume | mm3 | 79,516 | 39,758 |
| Torque per PM volume | Nm/mm3 | 0.00015 | 0.00040 |
| Power factor | - | 0.82 | 0.78 |
| Power | W | 259 | 360 |
| Iron loss | W | 17.4 | 29.8 |
| PM loss | W | 28.2 | 16.5 |
| Efficiency | % | 85.1 | 88.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kwon, J.-W.; Kwon, B.-I. Torque Enhancement Principle of Stator PM Vernier Machine by Consequent Pole Structure. Energies 2022, 15, 2993. https://doi.org/10.3390/en15092993
Kwon J-W, Kwon B-I. Torque Enhancement Principle of Stator PM Vernier Machine by Consequent Pole Structure. Energies. 2022; 15(9):2993. https://doi.org/10.3390/en15092993
Chicago/Turabian StyleKwon, Jung-Woo, and Byung-Il Kwon. 2022. "Torque Enhancement Principle of Stator PM Vernier Machine by Consequent Pole Structure" Energies 15, no. 9: 2993. https://doi.org/10.3390/en15092993
APA StyleKwon, J.-W., & Kwon, B.-I. (2022). Torque Enhancement Principle of Stator PM Vernier Machine by Consequent Pole Structure. Energies, 15(9), 2993. https://doi.org/10.3390/en15092993