
Seismic Analysis of 10 MW Offshore Wind Turbine with Large-Diameter Monopile in Consideration of Seabed Liquefaction




Abstract
:1. Introduction
2. Numerical Modeling of OWT
2.1. DTU 10 MW Reference WT
2.2. Structural Modeling
2.3. Soil Modeling
2.4. Modal Properties
2.5. System Damping
3. Dynamic Loading Cases
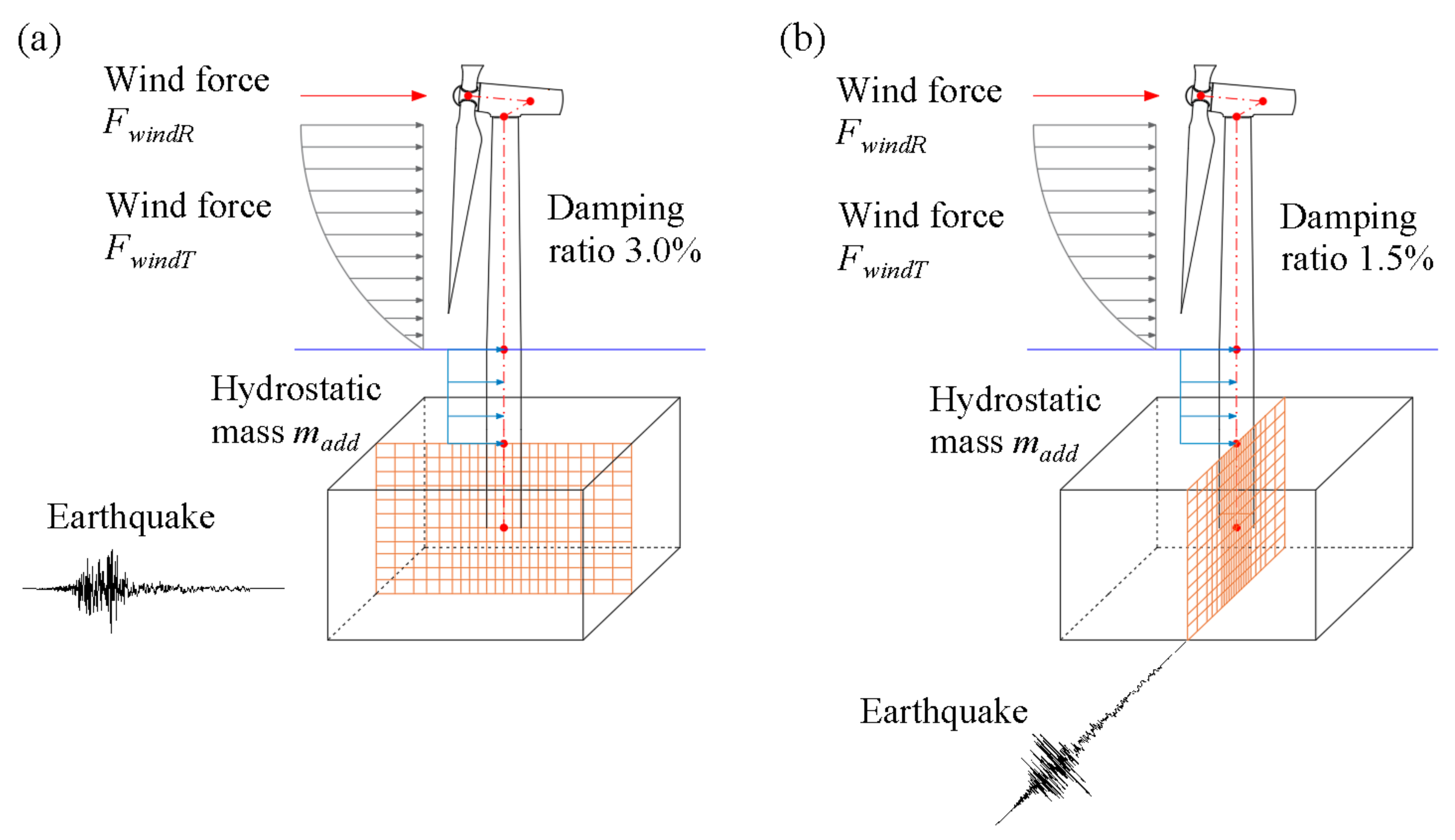
3.1. Inertial Loading
3.2. Wind Loading
3.3. Wave Loading
3.4. Earthquake Loading
3.5. Simulated Scenarios
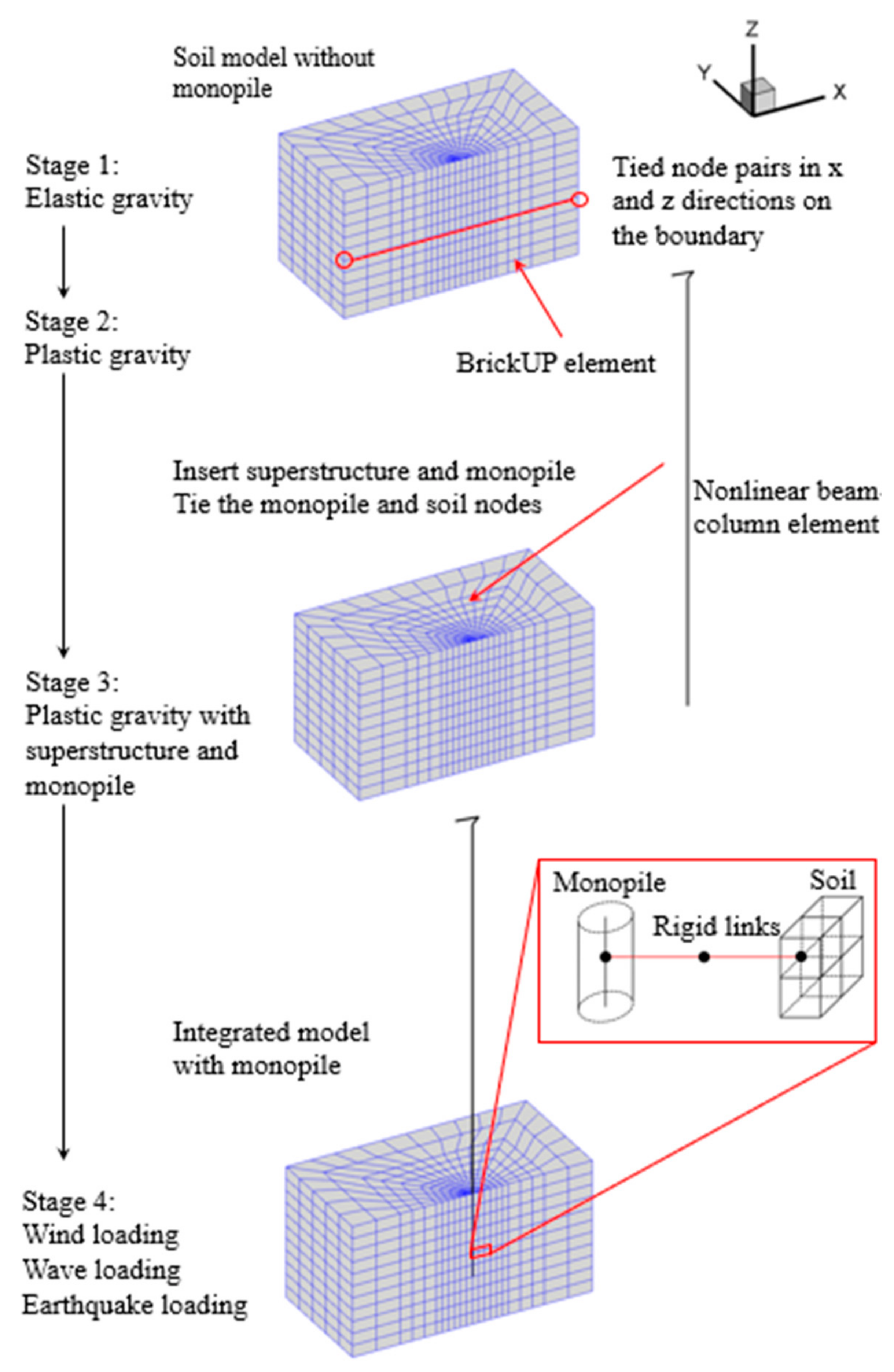
3.6. Staged Simulation Procedure
4. Numerical Results and Discussions
4.1. The Effect of Seismic Loading Direction
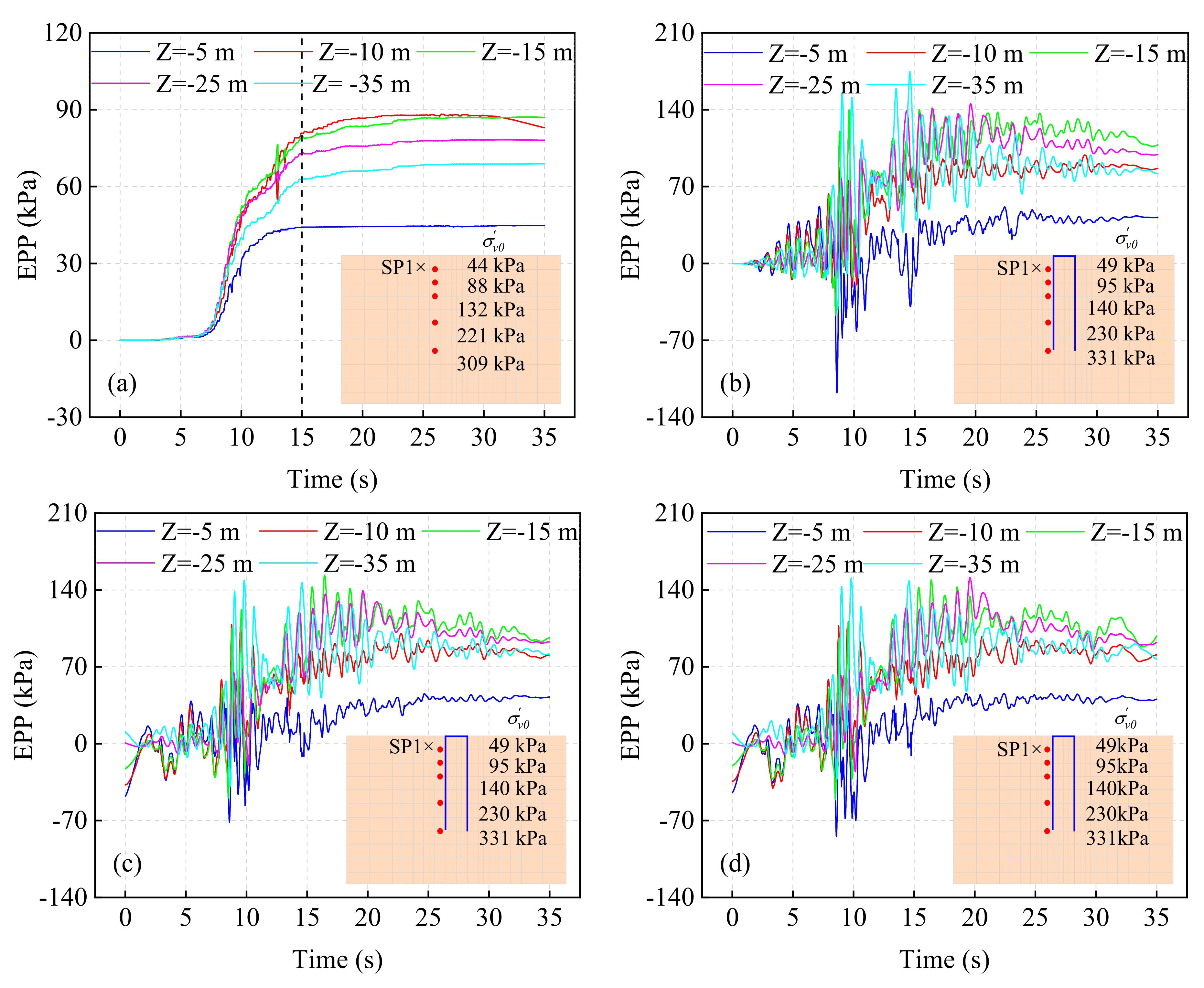
4.2. Liquefaction Analysis of Free-Field Soil (Scenario 1)
4.3. OWT in the Parked Condition (Scenario 2)
4.4. OWT in Operating Condition (Scenarios 3 and 4)
5. Conclusions
- (1)
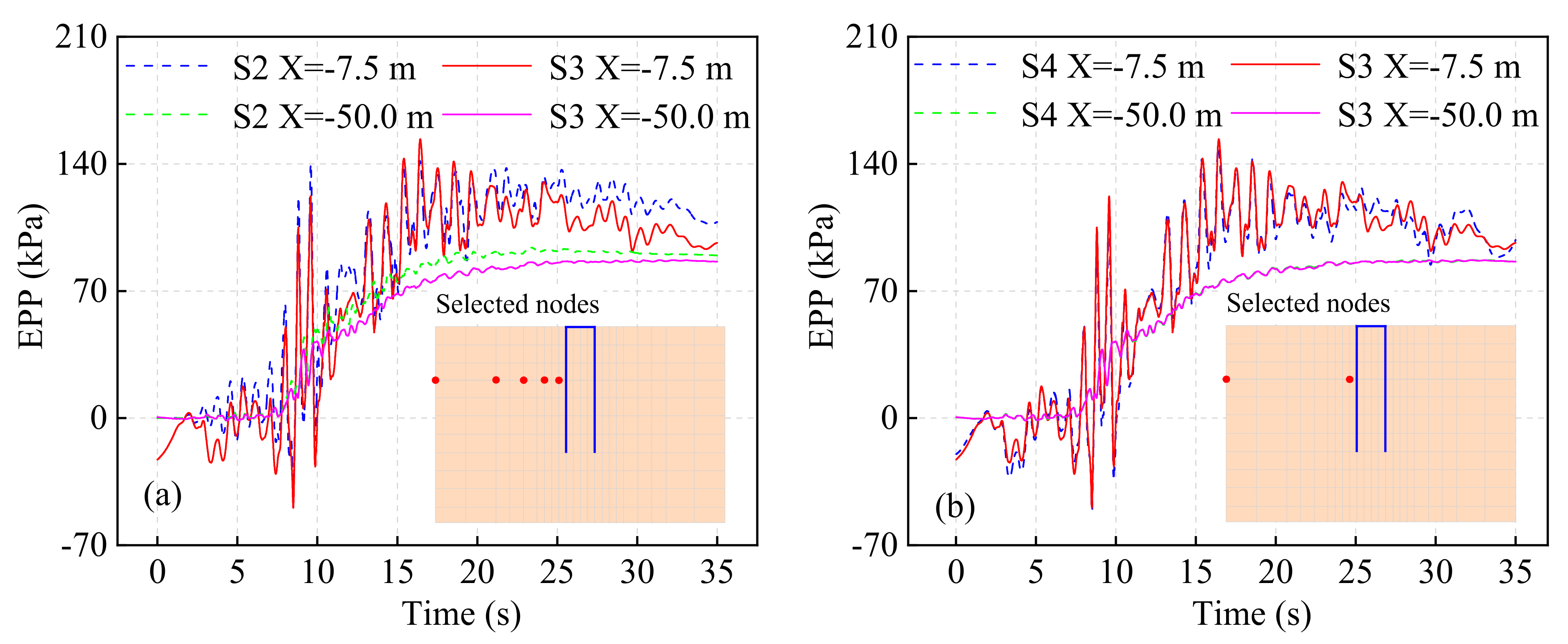
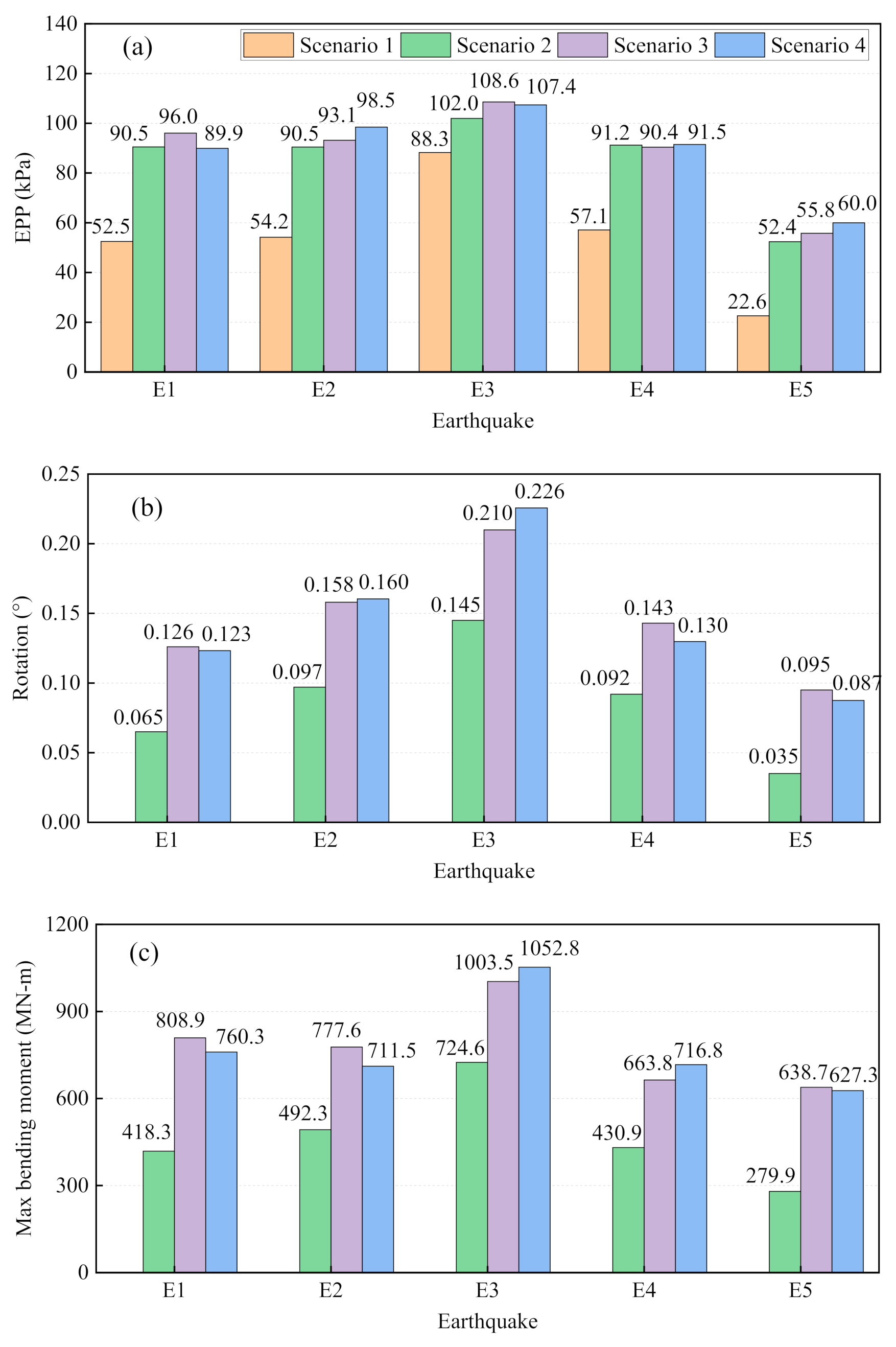
- Compared with free-field soil, the large-diameter monopile considerably increases the EPP of the soil surrounding the pile, particularly at the pile toe. However, the influence of the pile becomes limited for soil domain with a horizontal plan distance that is beyond twice the pile diameter;
- (2)
- The motions of the OWT under earthquake loadings increase the liquefaction depth and intensify the liquefaction severity;
- (3)
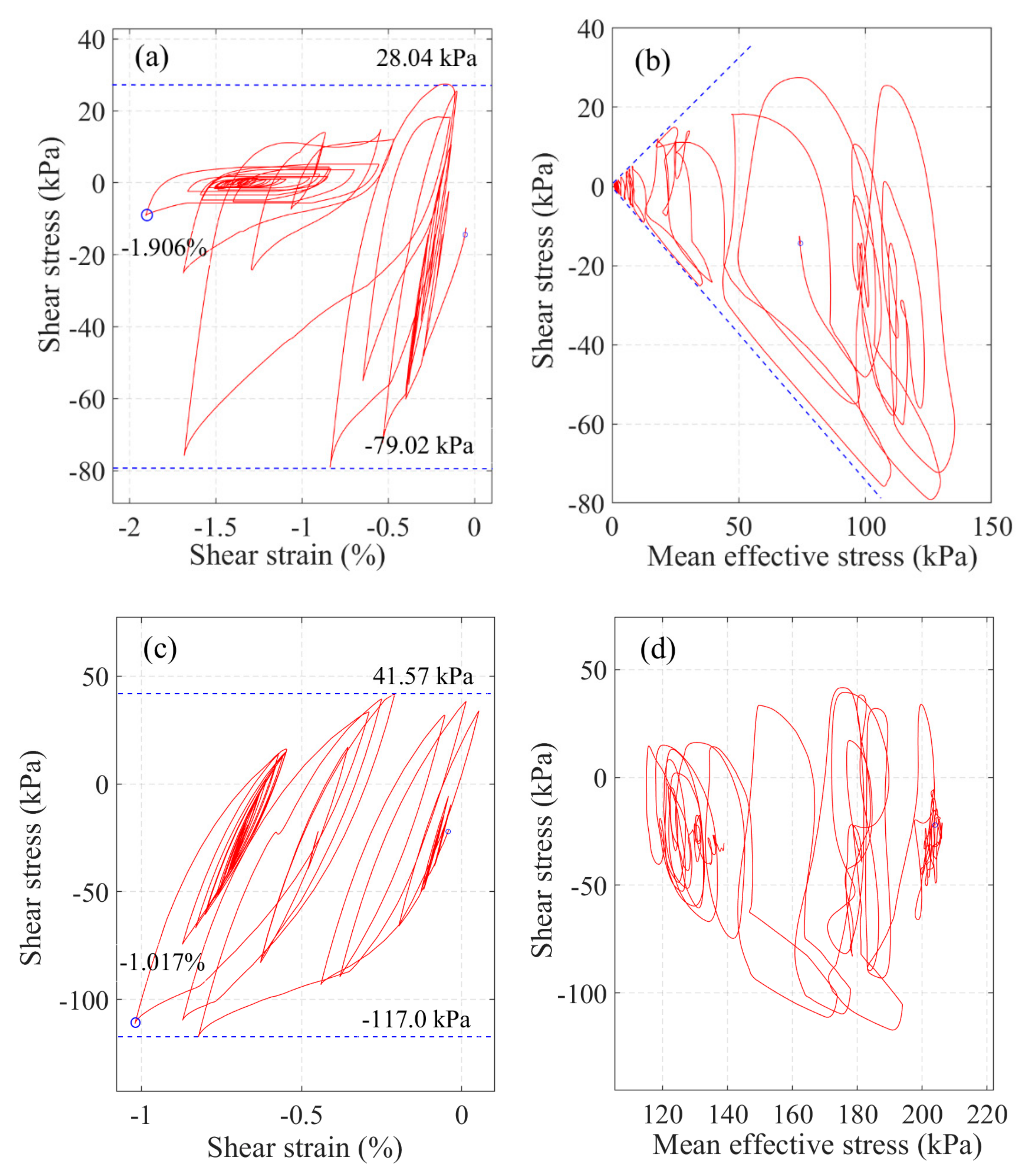
- Compared with earthquake loadings, the coupled wind and earthquake loadings have small effects on the EPP values of the soil. However, the introduction of wind loading leads to an increased shear stress amplitude and accumulated shear strain, which has a critical influence on the soil degradation;
- (4)
- The liquefaction reduces the foundation stiffness and capacity of the OWT. Consequently, under the coupled wind and earthquake loadings, the pile rotation angles at the mudline and tower top displacements increase distinctly. In particular, the maximum pile rotation angle exceeds the limit that is specified in a Chinese standard;
- (5)
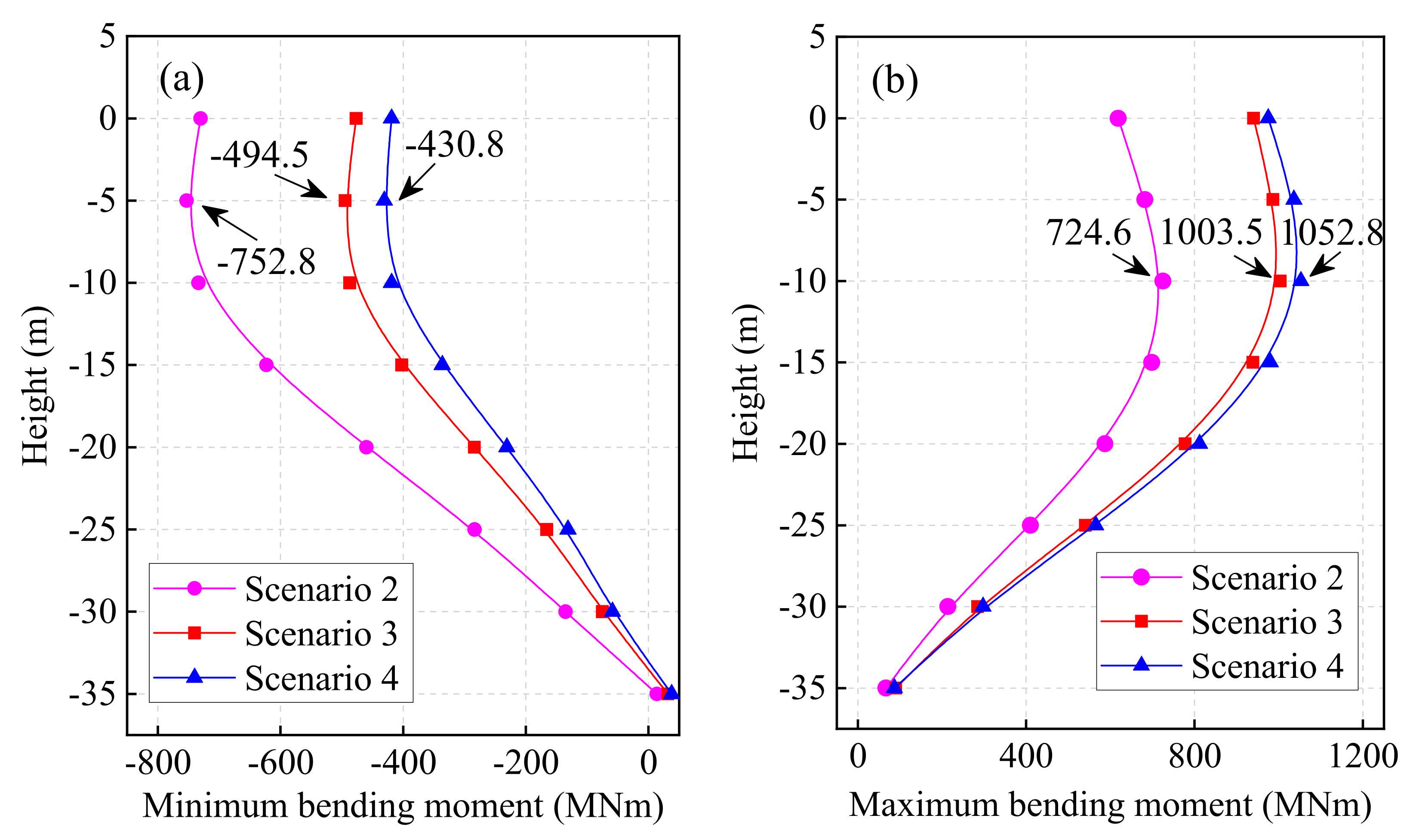
- A considerably larger bending moment in the monopile is observed under the coupled wind and earthquake loadings. The peak bending moment occurs with the liquefaction, with the maximum value appearing close to the interface between the liquefiable and nonliquefiable soil layers;
- (6)
- The influence of the wave loading on the dynamic response (tower top displacement, pile rotation angle, and bending moment) and the liquefaction severity is limited;
- (7)
- The strong coupling effect between the wind and earthquake loadings indicates that the past seismic analyses of OWTs that overlooked the liquefaction effect have considerably underestimated the seismic risks of OWTs.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BEM | blade element momentum |
| DOF | degree of freedom |
| DTU | Technical University of Denmark |
| EPP | excess pore water pressure |
| EPPR | excess pore water pressure ratio |
| FAST | fatigue, aerodynamic, structures, and turbulence |
| FE | finite element |
| FE-FD | finite element–finite difference |
| IFFT | inverse fast Fourier transform |
| NREL | National Renewable Energy Laboratory |
| OWT | offshore wind turbine |
| PGA | peak ground acceleration |
| PSD | power spectral density |
| RHA | response history analysis |
| RNA | rotor–nacelle assembly |
| SSI | soil–structure interaction |
| TP | transition piece |
| UCSD | University of California, San Diego |
| WT | wind turbine |
References
- Lee, J.; Zhao, F. Global Wind Energy Council Home Page. Available online: https://gwec.net/global-wind-report-2019/ (accessed on 19 March 2022).
- Watson, S.; Moro, A.; Reis, V.; Baniotopoulos, C.; Barth, S.; Bartoli, G.; Bauer, F.; Boelman, E.; Bosse, D.; Cherubini, A.; et al. Future emerging technologies in the wind power sector: A European perspective. Renew. Sust. Energy Rev. 2019, 113, 109270. [Google Scholar] [CrossRef]
- Bento, N.; Fontes, M. Emergence of floating offshore wind energy: Technology and industry. Renew. Sust. Energy Rev. 2019, 99, 66–82. [Google Scholar] [CrossRef]
- Katsanos, E.I.; Thöns, S.; Georgakis, C.Τ. Wind turbines and seismic hazard: A state-of-the-art review. Wind Energy 2016, 19, 2113–2133. [Google Scholar] [CrossRef] [Green Version]
- Kaynia, A.M. Seismic considerations in design of offshore wind turbines. Soil Dyn. Earthq. Eng. 2019, 124, 399–407. [Google Scholar] [CrossRef]
- Veers, P.; Dykes, K.; Lantz, E.; Barth, S.; Bottasso, C.L.; Carlson, O.; Clifton, A.; Green, J.; Green, P.; Holttinen, H.; et al. Grand challenges in the science of wind energy. Science 2019, 366, 443. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Skopljak, N. GE Haliade-X 12MW Produces First Power in Rotterdam. Available online: https://www.offshorewind.biz/2019/11/07/ge-haliade-x-12mw-produces-first-power-in-rotterdam/ (accessed on 19 March 2022).
- Oh, K.; Nam, W.; Ryu, M.S.; Kim, J.; Epureanu, B.I. A review of foundations of offshore wind energy convertors: Current status and future perspectives. Renew. Sust. Energy Rev. 2018, 88, 16–36. [Google Scholar] [CrossRef]
- Igwemezie, V.; Mehmanparast, A.; Kolios, A. Current trend in offshore wind energy sector and material requirements for fatigue resistance improvement in large wind turbine support structures—A review. Renew. Sust. Energy Rev. 2019, 101, 181–196. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Zeng, X.; Li, J.; Yang, X.; Wang, H. A review on recent advancements of substructures for offshore wind turbines. Energy Convers. Manag. 2018, 158, 103–119. [Google Scholar] [CrossRef]
- Wu, X.; Hu, Y.; Li, Y.; Yang, J.; Duan, L.; Wang, T.; Adcock, T.; Jiang, Z.; Gao, Z.; Lin, Z.; et al. Foundations of offshore wind turbines: A review. Renew. Sust. Energy Rev. 2019, 104, 379–393. [Google Scholar] [CrossRef] [Green Version]
- Negro, V.; LópezGutiérrez, J.; Esteban, M.D.; Matutano, C. Uncertainties in the design of support structures and foundations for offshore wind turbines. Renew. Energy 2014, 63, 125–132. [Google Scholar] [CrossRef] [Green Version]
- Wan, Y.; Fan, C.; Dai, Y.; Li, L.; Sun, W.; Zhou, P.; Qu, X. Assessment of the Joint Development Potential of Wave and Wind Energy in the South China Sea. Energies 2018, 11, 398. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Chen, S.; Ren, Z.; Lv, Y.; Tong, H.; Wen, Z. Project plan and research progress on key technologies of seismic zoning in sea areas. Prog. Earthq. Sci. 2020, 50, 2–19. [Google Scholar]
- Yang, Y.; Ye, K.; Li, C.; Michailides, C.; Zhang, W. Dynamic behavior of wind turbines influenced by aerodynamic damping and earthquake intensity. Wind Energy 2018, 21, 303–319. [Google Scholar] [CrossRef]
- Kjørlaug, R.A.; Kaynia, A.M. Vertical earthquake response of megawatt-sized wind turbine with soil-structure interaction effects. Earthq. Eng. Struct. Dyn. 2015, 44, 2341–2358. [Google Scholar] [CrossRef]
- Zafeirakos, A.; Gerolymos, N. On the seismic response of under-designed caisson foundations. Bull. Earthq. Eng. 2013, 11, 1337–1372. [Google Scholar] [CrossRef]
- Patil, A.; Jung, S.; Kwon, O.-S. Structural performance of a parked wind turbine tower subjected to strong ground motions. Eng. Struct. 2016, 120, 92–102. [Google Scholar] [CrossRef]
- Santangelo, F.; Failla, G.; Santini, A.; Arena, F. Time-domain uncoupled analyses for seismic assessment of land-based wind turbines. Eng. Struct. 2016, 123, 275–299. [Google Scholar] [CrossRef]
- Huang, S.; Huang, M.; Lyu, Y.; Xiu, L. Effect of sea ice on seismic collapse-resistance performance of wind turbine tower based on a simplified calculation model. Eng. Struct. 2021, 227, 111426. [Google Scholar] [CrossRef]
- Alati, N.; Failla, G.; Arena, F. Seismic analysis of offshore wind turbines on bottom-fixed support structures. Philos. Trans. A Math. Phys. Eng. Sci. 2015, 373, 20140086. [Google Scholar] [CrossRef]
- Santangelo, F.; Failla, G.; Arena, F.; Ruzzo, C. On time-domain uncoupled analyses for offshore wind turbines under seismic loads. Bull. Earthq. Eng. 2018, 16, 1007–1040. [Google Scholar] [CrossRef]
- Sigurᶞsson, G.Ö.; Rupakhety, R.; Rahimi, S.E.; Olafsson, S. Effect of pulse-like near-fault ground motions on utility-scale land-based wind turbines. Bull. Earthq. Eng. 2020, 18, 953–968. [Google Scholar] [CrossRef]
- Asareh, M.; Schonberg, W.; Volz, J. Fragility analysis of a 5-MW NREL wind turbine considering aero-elastic and seismic interaction using finite element method. Finite Elem. Anal. Des. 2016, 120, 57–67. [Google Scholar] [CrossRef]
- Fan, J.; Li, Q.; Zhang, Y. Collapse analysis of wind turbine tower under the coupled effects of wind and near-field earthquake. Wind Energy 2019, 22, 407–419. [Google Scholar] [CrossRef]
- Kim, D.H.; Lee, S.G.; Lee, I.K. Seismic fragility analysis of 5 MW offshore wind turbine. Renew. Energy 2014, 65, 250–256. [Google Scholar] [CrossRef]
- Martín del Campo, J.O.; Pozos-Estrada, A. Multi-hazard fragility analysis for a wind turbine support structure: An application to the Southwest of Mexico. Eng. Struct. 2020, 209, 109929. [Google Scholar] [CrossRef]
- Quilligan, A.; O’Connor, A.; Pakrashi, V. Fragility analysis of steel and concrete wind turbine towers. Eng. Struct. 2012, 36, 270–282. [Google Scholar] [CrossRef]
- Yang, Y.; Bashir, M.; Li, C.; Wang, J. Analysis of seismic behaviour of an offshore wind turbine with a flexible foundation. Ocean Eng. 2019, 178, 215–228. [Google Scholar] [CrossRef]
- Yang, Y.; Li, C.; Bashir, M.; Wang, J.; Yang, C. Investigation on the sensitivity of flexible foundation models of an offshore wind turbine under earthquake loadings. Eng. Struct. 2019, 183, 756–769. [Google Scholar] [CrossRef]
- Zuo, H.; Bi, K.; Hao, H.; Li, C. Influence of earthquake ground motion modelling on the dynamic responses of offshore wind turbines. Soil Dyn. Earthq. Eng. 2019, 121, 151–167. [Google Scholar] [CrossRef]
- Damgaard, M.; Zania, V.; Andersen, L.V.; Ibsen, L.B. Effects of soil–structure interaction on real time dynamic response of offshore wind turbines on monopiles. Eng. Struct. 2014, 75, 388–401. [Google Scholar] [CrossRef]
- Wang, P.; Zhao, M.; Du, X.; Liu, J.; Xu, C. Wind, wave and earthquake responses of offshore wind turbine on monopile foundation in clay. Soil Dyn. Earthq. Eng. 2018, 113, 47–57. [Google Scholar] [CrossRef]
- Wang, P.; Xu, Y.; Zhang, X.; Xi, R.; Du, X. A substructure method for seismic responses of offshore wind turbine considering nonlinear pile-soil dynamic interaction. Soil Dyn. Earthq. Eng. 2021, 144, 106684. [Google Scholar] [CrossRef]
- Prowell, I.; Veers, P. Assessment of Wind Turbine Seismic Risk: Existing Literature and Simple Study of Tower Moment Demand; Sandia National Laboratories: Albuquerque, NM, USA; Livermore, CA, USA, 2009. [Google Scholar]
- Wang, Y.; Chai, J.; Chang, Y.; Huang, T.; Kuo, Y. Development of Seismic Demand for Chang-Bin Offshore Wind Farm in Taiwan Strait. Energies 2016, 9, 1036. [Google Scholar] [CrossRef] [Green Version]
- Kuo, Y.; Chong, K.; Tseng, Y.; Hsu, C.; Lin, C. Assessment on liquefaction potential of seabed soil in Chang-Bin Offshore wind farm considering parametric uncertainty of standard penetration tests. Eng. Geol. 2020, 267, 105497. [Google Scholar] [CrossRef]
- Xiang, N.; Goto, Y.; Obata, M.; Alam, M.S. Passive seismic unseating prevention strategies implemented in highway bridges: A state-of-the-art review. Eng. Struct. 2019, 194, 77–93. [Google Scholar] [CrossRef]
- Sumer, B.M.; Ansal, A.; Cetin, K.O.; Damgaard, J.; Gunbak, A.R.; Hansen, N.-E.O.; Sawicki, A.; Synolakis, C.E.; Yalciner, A.C.; Yuksel, Y.; et al. Earthquake-Induced Liquefaction around Marine Structures. J. Waterw. Port Coast. Ocean Eng. 2007, 133, 55–82. [Google Scholar] [CrossRef]
- Barari, A.; Bagheri, M.; Rouainia, M.; Ibsen, L.B. Deformation mechanisms for offshore monopile foundations accounting for cyclic mobility effects. Soil Dyn. Earthq. Eng. 2017, 97, 439–453. [Google Scholar] [CrossRef] [Green Version]
- Patra, S.K.; Haldar, S. Response of monopile supported offshore wind turbine in liquefied soil. In Proceedings of the Indian Geotechnical Conference, Bengaluru, India, 13–15 December 2018; pp. 1–8. [Google Scholar]
- Patra, S.K.; Haldar, S. Fore-aft and the side-to-side response of monopile supported offshore wind turbine in liquefiable soil. Mar. Georesour. Geotechnol. 2021, 39, 1411–1432. [Google Scholar] [CrossRef]
- Patra, S.K.; Haldar, S. Seismic response of monopile supported offshore wind turbine in liquefiable soil. Structures 2021, 31, 248–265. [Google Scholar] [CrossRef]
- Kementzetzidis, E.; Corciulo, S.; Versteijlen, W.G.; Pisanò, F. Geotechnical aspects of offshore wind turbine dynamics from 3D non-linear soil-structure simulations. Soil Dyn. Earthq. Eng. 2019, 120, 181–199. [Google Scholar] [CrossRef]
- Zhang, P.; Xiong, K.; Ding, H.; Le, C. Anti-liquefaction characteristics of composite bucket foundations for offshore wind turbines. J. Renew. Sustain. Energy 2014, 6, 053102. [Google Scholar] [CrossRef]
- Zhang, P.; Ding, H.; Le, C. Seismic response of large-scale prestressed concrete bucket foundation for offshore wind turbines. J. Renew. Sustain. Energy 2014, 6, 013127. [Google Scholar] [CrossRef]
- Seed, H.B.; Idriss, I.M. A Simplified Procedure for Evaluating Soil Liquefaction Potential; University of California: Berkeley, CA, USA, 1970. [Google Scholar]
- Shanon and Wilson Inc. Evaluation of Soil Liquefaction Potential for Level Ground during Earthquakes; Shannon & Wilson, Inc. and Agbabian Associates: Seattle, WA, USA; El Segundo, CA, USA, 1976. [Google Scholar]
- Gao, B.; Ye, G.; Zhang, Q.; Xie, Y.; Yan, B. Numerical simulation of suction bucket foundation response located in liquefiable sand under earthquakes. Ocean Eng. 2021, 235, 109394. [Google Scholar] [CrossRef]
- Esfeh, P.K.; Kaynia, A.M. Numerical modeling of liquefaction and its impact on anchor piles for floating offshore structures. Soil Dyn. Earthq. Eng. 2019, 127, 105839. [Google Scholar] [CrossRef]
- Esfeh, P.K.; Kaynia, A.M. Earthquake response of monopiles and caissons for Offshore Wind Turbines founded in liquefiable soil. Soil Dyn. Earthq. Eng. 2020, 136, 106213. [Google Scholar] [CrossRef]
- Esfeh, P.K.; Govoni, L.; Kaynia, A.M. Seismic response of subsea structures on caissons and mudmats due to liquefaction. Mar. Struct. 2021, 78, 102972. [Google Scholar] [CrossRef]
- Tsiapas, Y.Z.; Chaloulos, Y.K.; Bouckovalas, G.D.; Bazaios, K.N. Performance based design of Tension Leg Platforms under seismic loading and seabed liquefaction: A feasibility study. Soil Dyn. Earthq. Eng. 2021, 150, 106894. [Google Scholar] [CrossRef]
- Chaloulos, Y.K.; Tsiapas, Y.Z.; Bouckovalas, G.D. Seismic analysis of a model tension leg supported wind turbine under seabed liquefaction. Ocean Eng. 2021, 238, 109706. [Google Scholar] [CrossRef]
- Fard, M.M.; Erken, A.; Erkmen, B.; Ansal, A. Analysis of Offshore Wind Turbine by considering Soil-Pile-Structure Interaction: Effects of Foundation and Sea-Wave Properties. J. Earthquake Eng. 2021, 1–23. [Google Scholar] [CrossRef]
- Li, X.; Zeng, X.; Yu, X.; Wang, X. Seismic response of a novel hybrid foundation for offshore wind turbine by geotechnical centrifuge modeling. Renew. Energy 2021, 172, 1404–1416. [Google Scholar] [CrossRef]
- Wang, X.; Yang, X.; Zeng, X. Seismic centrifuge modelling of suction bucket foundation for offshore wind turbine. Renew. Energy 2017, 114, 1013–1022. [Google Scholar] [CrossRef]
- Wang, X.; Zeng, X.; Li, X.; Li, J. Liquefaction characteristics of offshore wind turbine with hybrid monopile foundation via centrifuge modelling. Renew. Energy 2020, 145, 2358–2372. [Google Scholar] [CrossRef]
- Ko, Y.-Y.; Li, Y.-T.; Chen, C.-H.; Yeh, S.-Y.; Hsu, S.-Y. Influences of repeated liquefaction and pulse-like ground motion on the seismic response of liquefiable ground observed in shaking table tests. Eng. Geol. 2021, 291, 106234. [Google Scholar] [CrossRef]
- Ko, Y.Y.; Li, Y.T. Response of a scale-model pile group for a jacket foundation of an offshore wind turbine in liquefiable ground during shaking table tests. Earthq. Eng. Struct. Dyn. 2020, 49, 1682–1701. [Google Scholar] [CrossRef]
- Bak, C.; Zahle, F.; Bitsche, R.; Kim, T.; Yde, A.; Henriksen, L.C.; Natarajan, A.; Hansen, M.H. Description of the DTU 10 MW Reference Wind Turbine; DTU Wind Energy: Roskilde, Denmark, 2013. [Google Scholar]
- Velarde, J. Design of Monopile Foundations to Support the DTU 10 MW Offshore Wind Turbine. Master’s Thesis, Delft University of Science and Technology and Norwegian University of Science and Technology, Trondheim, Norway, 2016. [Google Scholar]
- De Risi, R.; Bhattacharya, S.; Goda, K. Seismic performance assessment of monopile-supported offshore wind turbines using unscaled natural earthquake records. Soil Dyn. Earthq. Eng. 2018, 109, 154–172. [Google Scholar] [CrossRef]
- Dong, R.G. Effective Mass and Damping of Submerged Structures; Lawrence Livermore National Laboratory: Livermore, CA, USA, 1978. [Google Scholar]
- DNVGL-RP-C205; Environmental Conditions and Environmental Loads. Det Norske Veritas and Germanischer Lloyd: Oslo, Norway, 2017.
- ISO 19901-4; Petroleum and Natural Gas Industries-Specific Requirements for Offshore Structures Part 4: Geotechnical and Foundation Design Considerations. International Organization for Standardization: Geneva, Switzerland, 2016.
- DNVGL-RP-C212; Offshore Soil Mechanics and Geotechnical Engineering. Det Norske Veritas and Germanischer Lloyd: Oslo, Norway, 2019.
- Lu, J.; Elgamal, A.; Yan, L.; Law, K.H.; Conte, J.P. Large-Scale Numerical Modeling in Geotechnical Earthquake Engineering. Int. J. Geomech. 2011, 11, 490–503. [Google Scholar] [CrossRef] [Green Version]
- Qiu, Z.; Lu, J.; Elgamal, A.; Su, L.; Wang, N.; Almutairi, A. OpenSees Three-Dimensional Computational Modeling of Ground-Structure Systems and Liquefaction Scenarios. Comput. Model. Eng. Sci. 2019, 120, 629–656. [Google Scholar] [CrossRef]
- Prevost, J.H. Mathematical modelling of monotonic and cyclic undraind clay behavior. Int. J. Numer. Anal. Methods Geomech. 1977, 1, 195–216. [Google Scholar] [CrossRef]
- Prevost, J.H. A simple plasticity theory for frictional cohesionless soils. Soil Dyn. Earthq. Eng. 1985, 4, 9–17. [Google Scholar] [CrossRef]
- Zhang, X.; Tang, L.; Ling, X.; Chan, A.H.C.; Lu, J. Using peak ground velocity to characterize the response of soil-pile system in liquefying ground. Eng. Geol. 2018, 240, 62–73. [Google Scholar] [CrossRef]
- Cheng, Z.; Jeremić, B. Numerical modeling and simulation of pile in liquefiable soil. Soil Dyn. Earthq. Eng. 2009, 29, 1405–1416. [Google Scholar] [CrossRef]
- Dafalias, Y.F.; Manzari, M.T. Simple Plasticity Sand Model Accounting for Fabric Change Effects. J. Eng. Mech. 2004, 130, 622–634. [Google Scholar] [CrossRef]
- Manzari, M.T.; Dafalias, Y.F. A critical state two-surface plasticity model for sands. Géotechnique 1997, 47, 255–272. [Google Scholar] [CrossRef]
- Rahmani, A.; Pak, A. Dynamic behavior of pile foundations under cyclic loading in liquefiable soils. Comput. Geotech. 2012, 40, 114–126. [Google Scholar] [CrossRef]
- Wilson, D.W. Soil-Pile-Superstructure Interaction in Liquefying Sand and Soft Clay. Ph.D. Thesis, University of California, Davis, CA, USA, 1998. [Google Scholar]
- Wang, R.; Zhang, J.-M.; Wang, G. A unified plasticity model for large post-liquefaction shear deformation of sand. Comput. Geotech. 2014, 59, 54–66. [Google Scholar] [CrossRef]
- Wang, R.; Fu, P.; Zhang, J.-M. Finite element model for piles in liquefiable ground. Comput. Geotech. 2016, 72, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Elgamala, A.; Yang, Z.; Parrab, E. Computational modeling of cyclic mobility and post-liquefaction site response. Soil Dyn. Earthq. Eng. 2002, 22, 259–271. [Google Scholar] [CrossRef]
- Yang, Z.; Lu, J.; Elgamal, A. OpenSees Soil Models and Solid-Fluid Fully Coupled Elements User’s Manual; University of California: San Diego, CA, USA, 2008. [Google Scholar]
- Chiaramonte, M.M.; Arduino, P.; Lehman, D.E.; Roeder, C.W. Seismic analyses of conventional and improved marginal wharves. Earthquake Eng. Struct. Dyn. 2013, 42, 1435–1450. [Google Scholar] [CrossRef]
- Law, H.K.; Lam, I.P. Application of Periodic Boundary for Large Pile Group. J. Geotech. Geoenviron. Eng. 2001, 127, 889–892. [Google Scholar] [CrossRef]
- Elgamal, A.; Yan, L.; Yang, Z.; Conte, J.P. Three-Dimensional Seismic Response of Humboldt Bay Bridge-Foundation-Ground System. J. Struct. Eng. 2008, 134, 1165–1176. [Google Scholar] [CrossRef] [Green Version]
- Valamanesh, V.; Myers, A.T. Aerodynamic Damping and Seismic Response of Horizontal Axis Wind Turbine Towers. J. Struct. Eng. 2014, 140, 04014090. [Google Scholar] [CrossRef]
- Mo, R.; Kang, H.; Li, M.; Zhao, X. Seismic Fragility Analysis of Monopile Offshore Wind Turbines under Different Operational Conditions. Energies 2017, 10, 1037. [Google Scholar] [CrossRef] [Green Version]
- Zuo, H.; Bi, K.; Hao, H. Dynamic analyses of operating offshore wind turbines including soil-structure interaction. Eng. Struct. 2018, 157, 42–62. [Google Scholar] [CrossRef]
- Ali, A.; De Risi, R.; Sextos, A.; Goda, K.; Chang, Z. Seismic vulnerability of offshore wind turbines to pulse and non-pulse records. Earthq. Eng. Struct. Dyn. 2019, 49, 24–50. [Google Scholar] [CrossRef]
- Hudson, M.; Idriss, I.M.; Beikae, M. User’s Manual’s for QUAD4M a Computer Program to Evaluate the Seismic Response of Soil Structures Using Finite Element Procedures and Incorporating a Compliant base; University of California: Davis, CA, USA, 1994. [Google Scholar]
- IEC 61400-3-1; Wind Energy Generation Systems Part 3-1: Design Requirements for Fixed Offshore Wind Turbines. International Electrotechnical Commission: Geneva, Switzerland, 2019.
- Jonkman, J.M.; Buhl, M.L. FAST User’s Guide; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2005. [Google Scholar]
- Frohboese, P.; Schmuck, C.; Hassan, G.G. Thrust coefficients used for estimation of wake effects for fatigue load calculation. In Proceedings of the European Wind Energy Conference and Exhibition, Warsaw, Poland, 20–23 April 2010. [Google Scholar]
- Arany, L.; Bhattacharya, S.; Macdonald, J.; Hogan, S.J. Design of monopiles for offshore wind turbines in 10 steps. Soil Dyn. Earthq. Eng. 2017, 92, 126–152. [Google Scholar] [CrossRef] [Green Version]
- Jonkman, B.J.; Buhl, J.M.L. TurbSim User’s Guide; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2006. [Google Scholar]
- Moriarty, P.J.; Hansen, A.C. AeroDyn Theory Manual; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2005. [Google Scholar]
- DNV-OS-J101; Design of Offshore Wind Turbine Structures. Det Norske Veritas: Oslo, Denmark, 2014.
- ASCE/SEI 7-10; Minimum Design Loads for Buildings and Other Structures. American Society of Civil Engineers: Reston, VA, USA, 2010.
- GB 50011-2010; Code for seismic design of buildings. China Planning Press: Beijing, China, 2016.
- FD 003-2007; Design regulations on subgrade and foundations for wind turbine generator system. China Water & Power Press: Beijing, China, 2007.
- GB 50135-2019; Standard for design of high-rising structures. China Planning Press: Beijing, China, 2019.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DTU 10 MW Reference WT with Large-Diameter Monopile | ||
|---|---|---|
| Basic description | Rated power | 10 MW |
| Cut-in, rated, cut-out wind speeds | 4 m/s, 11.4 m/s, 25 m/s | |
| Minimum, maximum rotor speeds | 6.0 rpm, 9.6 rpm | |
| Rotor–nacelle assembly | Single blade mass | 40,699 kg |
| Hub mass | 105,520 kg | |
| Nacelle mass | 446,036 kg | |
| Blade structural damping ratio | 0.48% | |
| Tower | Height above water | 115.63 m |
| Tower diameter | 10.375 m (bottom), 6.875 m (top) | |
| Wall thickness (10 sections from bottom to top) | 0.038 m, 0.036 m, 0.032 m, 0.034 m, 0.030 m, 0.028 m, 0.026 m, 0.024 m, 0.022 m, 0.020 m | |
| Integrated mass | 786,223 kg | |
| Structural damping ratio | 1% | |
| Transition piece | Integrated mass | 500,000 kg |
| Monopile | Length | 40 m (in water); 35 m (in soil) |
| Diameter | 10 m | |
| Wall thickness | 0.125 m | |
| Integrated mass | 2,554,000 kg | |
| Structural damping ratio | 1% | |
| Soil domain | Length | 100 m |
| Width | 100 m | |
| Depth | 55 m | |
| Parameters | Values |
|---|---|
| Relative density | 35–65% |
| Saturated soil mass density (kg/m3) | 1900 |
| Reference low-strain shear modulus (kPa) | 75,000 |
| Reference bulk modulus (kPa) | 200,000 |
| Friction angle (in degrees) | 33 |
| Peak shear strain at peak shear strength (−) | 0.1 |
| Reference mean effective confining pressure (kPa) | 80 |
| Constant defining various shear and bulk modulus | 0.5 |
| Phase transformation angle (in degrees) | 27 |
| Constant defining the rate of shear-induced volume contraction or pore pressure built up | 0.07 |
| Constant 1 defining the rate of shear-induced volume dilation | 0.4 |
| Constant 2 defining the rate of shear-induced volume dilation | 2 |
| Parameter 1 controlling the mechanism of liquefaction-induced perfectly plastic shear strain accumulation (kPa) | 10 |
| Parameter 2 controlling the mechanism of liquefaction-induced perfectly plastic shear strain accumulation | 0.01 |
| Parameter 3 controlling the mechanism of liquefaction-induced perfectly plastic shear strain accumulation | 1 |
| Number of yield surfaces | 20 |
| Initial void ratio | 0.6 |
| Numerical constant | 0.7 |
| No. | Year | Magnitude | Earthquake Event | Station Name | Peak Ground Acceleration (PGA) (g) | Predominant Frequency (Hz) |
|---|---|---|---|---|---|---|
| E1 | 1979 | 6.53 | Imperial Valley | El Centro Array No.11 | 0.38 | 3.78 |
| E2 | 1994 | 6.69 | Northbridge | Canyon Country-W Lost Canyon | 0.48 | 1.42 |
| E3 | 1995 | 6.90 | Kobe | Shin-Osaka | 0.23 | 0.81 |
| E4 | 1999 | 6.20 | Chi-Chi | CHY101 | 0.18 | 0.59 |
| E5 | 2004 | 6.00 | Parkfield | Parkfield-Froelich | 0.46 | 7.40 |
| Scenario | Analysis Object | Wind Speeds (m/s) | Earthquakes | Turbine States | Remarks | |
|---|---|---|---|---|---|---|
| Records | PGA (g) | |||||
| Scenario 1 | Free-field soil | 0.0 | E1–E5 | 0.15 | - | Earthquake |
| Scenario 2 | OWT | 0.0 | E1–E5 | 0.15 | Parked | Earthquake |
| Scenario 3 | OWT | 11.4 | E1–E5 | 0.15 | In-operation | Earthquake + Wind |
| Scenario 4 | OWT | 11.4 | E1–E5 | 0.15 | In-operation | Earthquake + Wind + Wave |
| Loading Cases | Tower | Pile | Soil | |||||
|---|---|---|---|---|---|---|---|---|
| Tower Top Displacement (m) | Rotation at Mudline (°) | Max Bending Moment (MN-m) | Liquefied Depth (m) | Max EPP 1 (kPa) | ||||
| Z = −5 m | Z = −10 m | Z = −15 m | ||||||
| Scenario 1 (S1) | E1 | - | - | - | 5 | 44.7 | 52.5 | 47.6 |
| E2 | - | - | - | 5 | 44.4 | 54.2 | 57.3 | |
| E3 | - | - | - | 10 | 44.8 | 88.3 | 87.0 | |
| E4 | - | - | - | 5 | 44.5 | 57.1 | 51.1 | |
| E5 | - | - | - | 0 | 33.5 | 22.6 | 16.4 | |
| Scenario 2 (S2) | E1 | 0.114 | 0.065 | 418.3 | 10 | 64.1 | 90.5 | 105.7 |
| E2 | 0.105 | 0.097 | 492.3 | 10 | 60.0 | 90.5 | 123.8 | |
| E3 | 0.221 | 0.145 | 724.6 | 15 | 59.2 | 102.0 | 141.6 | |
| E4 | 0.309 | 0.092 | 430.9 | 10 | 59.3 | 91.2 | 120.5 | |
| E5 | 0.017 | 0.035 | 279.9 | 5 | 52.8 | 52.4 | 38.2 | |
| Scenario 3 (S3) | E1 | 1.135 | 0.126 | 808.9 | 10 | 67.6 | 96.0 | 102.0 |
| E2 | 1.167 | 0.158 | 777.6 | 10 | 68.5 | 93.1 | 117.4 | |
| E3 | 1.317 | 0.210 | 1003.5 | 15 | 65.3 | 108.6 | 153.6 | |
| E4 | 1.117 | 0.143 | 663.8 | 10 | 67.8 | 90.4 | 102.0 | |
| E5 | 1.116 | 0.095 | 638.7 | 5 | 50.0 | 55.8 | 34.4 | |
| Scenario 4 (S4) | E1 | 1.138 | 0.123 | 760.3 | 10 | 67.2 | 89.9 | 112.9 |
| E2 | 1.206 | 0.160 | 711.5 | 10 | 66.6 | 98.5 | 105.3 | |
| E3 | 1.392 | 0.226 | 1052.8 | 15 | 46.9 | 107.4 | 149.6 | |
| E4 | 1.142 | 0.130 | 716.8 | 10 | 72.6 | 91.5 | 97.6 | |
| E5 | 1.142 | 0.087 | 627.3 | 5 | 50.5 | 60.0 | 32.5 | |
| Loading Cases | Direction | Tower | Pile | ||
|---|---|---|---|---|---|
| Tower Top Displacement (m) | Rotation at Mudline (°) | Max Bending Moment (MN-m) | |||
| Scenario 3 (S3) | Case 1 1 | X | 1.302 | 0.209 | 1019.3 |
| Y | 0.000 | 0.000 | 0.0 | ||
| Case 2 2 | X | 1.206 | 0.112 | 525.4 | |
| Y | 0.236 | 0.098 | 798.2 | ||
| Model | EPP 1 (kPa) | ||||
|---|---|---|---|---|---|
| Z = −5 m | Z = −10 m | Z = −15 m | Z = −25 m | Z = −35 m | |
| Coarse mesh | 44.8 | 88.3 | 87.0 | 78.3 | 68.9 |
| Fine mesh | 44.2 | 85.8 | 85.4 | 78.3 | 68.5 |
| Difference (%) | 1.2% | 2.7% | 1.5% | 0.5% | 0.6% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Yuan, G.-K.; Zhu, S.; Gu, Q.; Ke, S.; Lin, J. Seismic Analysis of 10 MW Offshore Wind Turbine with Large-Diameter Monopile in Consideration of Seabed Liquefaction. Energies 2022, 15, 2539. https://doi.org/10.3390/en15072539
Zhang J, Yuan G-K, Zhu S, Gu Q, Ke S, Lin J. Seismic Analysis of 10 MW Offshore Wind Turbine with Large-Diameter Monopile in Consideration of Seabed Liquefaction. Energies. 2022; 15(7):2539. https://doi.org/10.3390/en15072539
Chicago/Turabian StyleZhang, Jian, Guo-Kai Yuan, Songye Zhu, Quan Gu, Shitang Ke, and Jinghua Lin. 2022. "Seismic Analysis of 10 MW Offshore Wind Turbine with Large-Diameter Monopile in Consideration of Seabed Liquefaction" Energies 15, no. 7: 2539. https://doi.org/10.3390/en15072539
APA StyleZhang, J., Yuan, G.-K., Zhu, S., Gu, Q., Ke, S., & Lin, J. (2022). Seismic Analysis of 10 MW Offshore Wind Turbine with Large-Diameter Monopile in Consideration of Seabed Liquefaction. Energies, 15(7), 2539. https://doi.org/10.3390/en15072539