
Design, Control and Testing of a Modular Multilevel Converter with a Single Cell per Arm in Grid-Forming and Grid-Following Operations for Scaled-Down Experimental Platforms

 ,
,  ,
,  , , ,
, , ,  ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
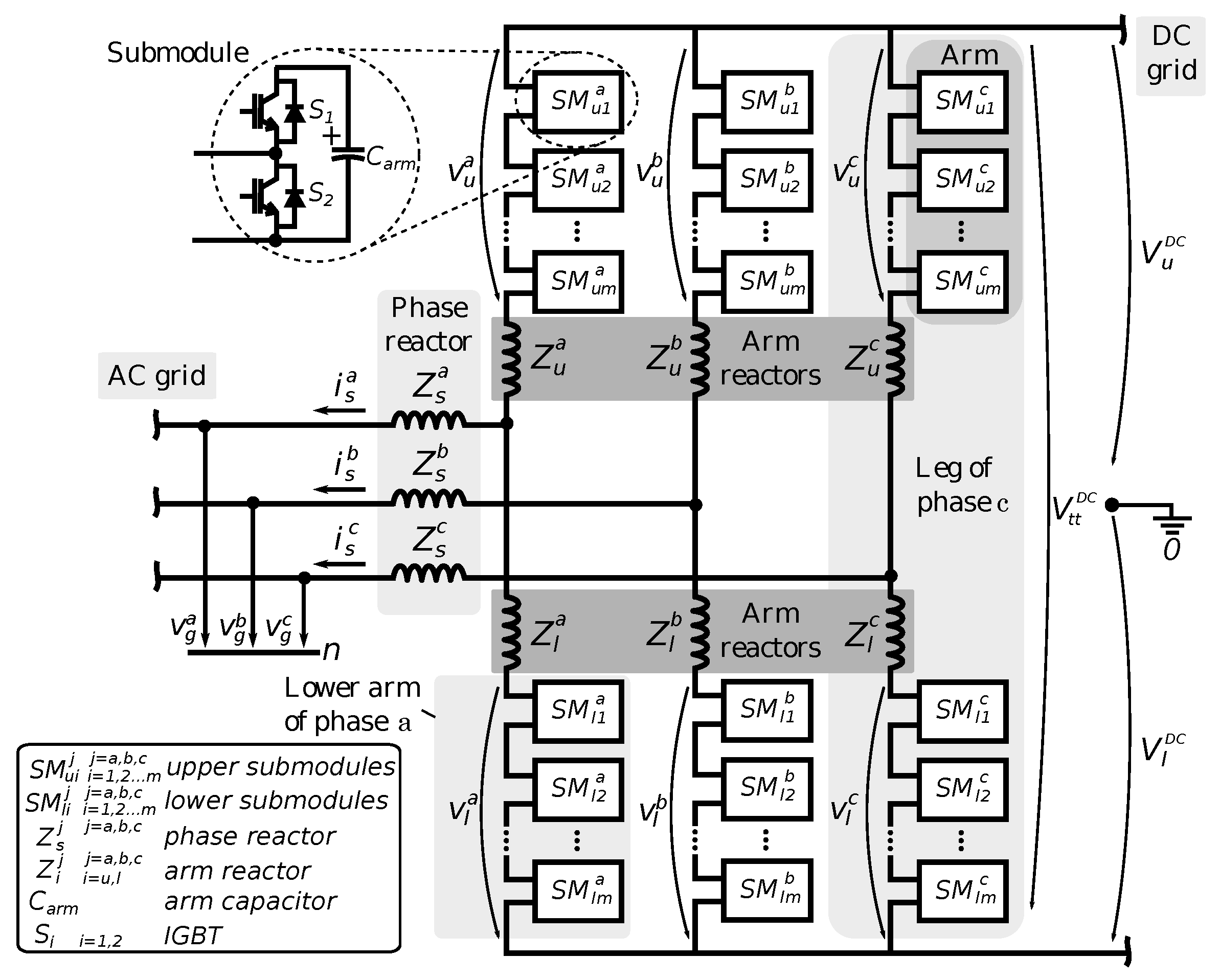
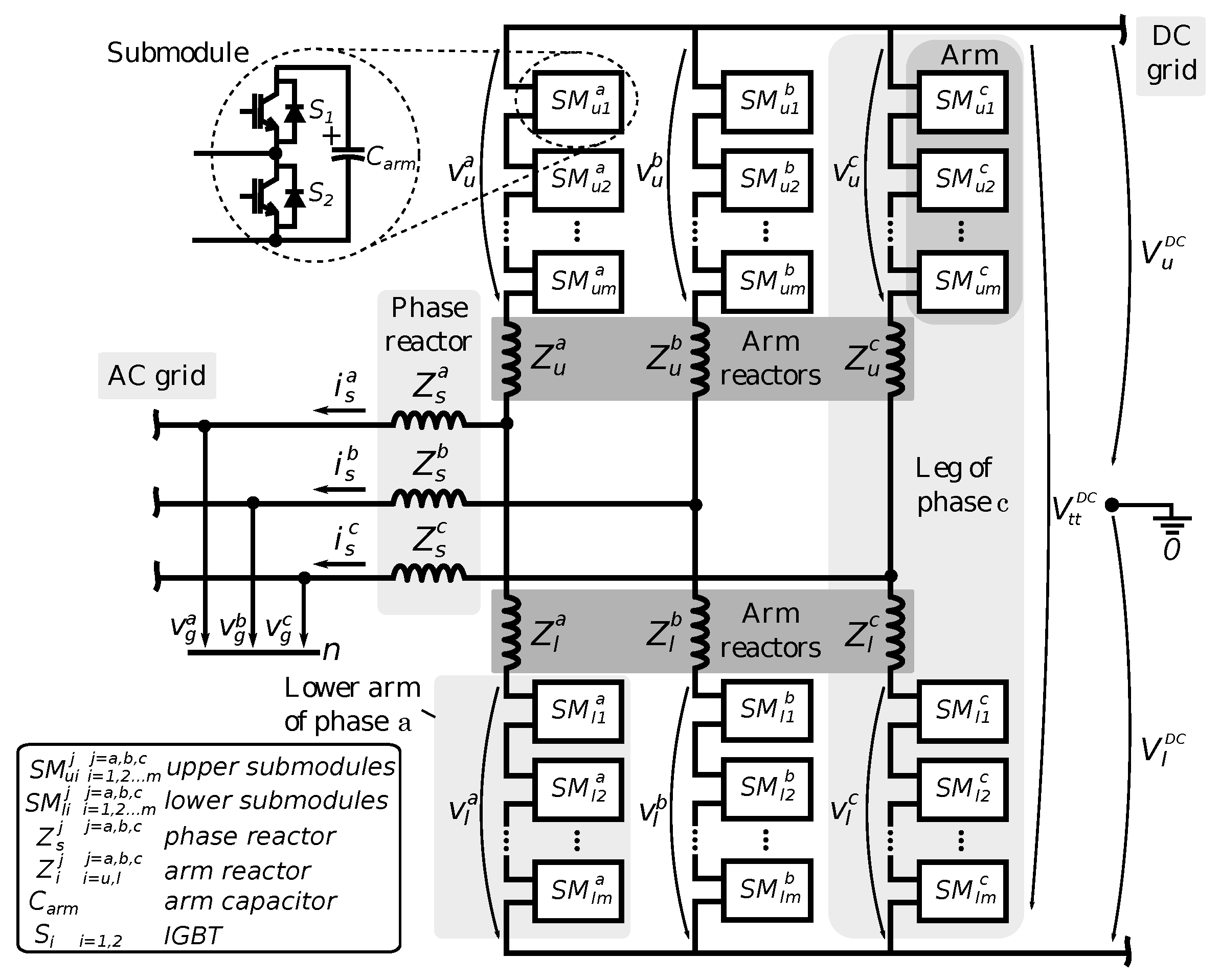
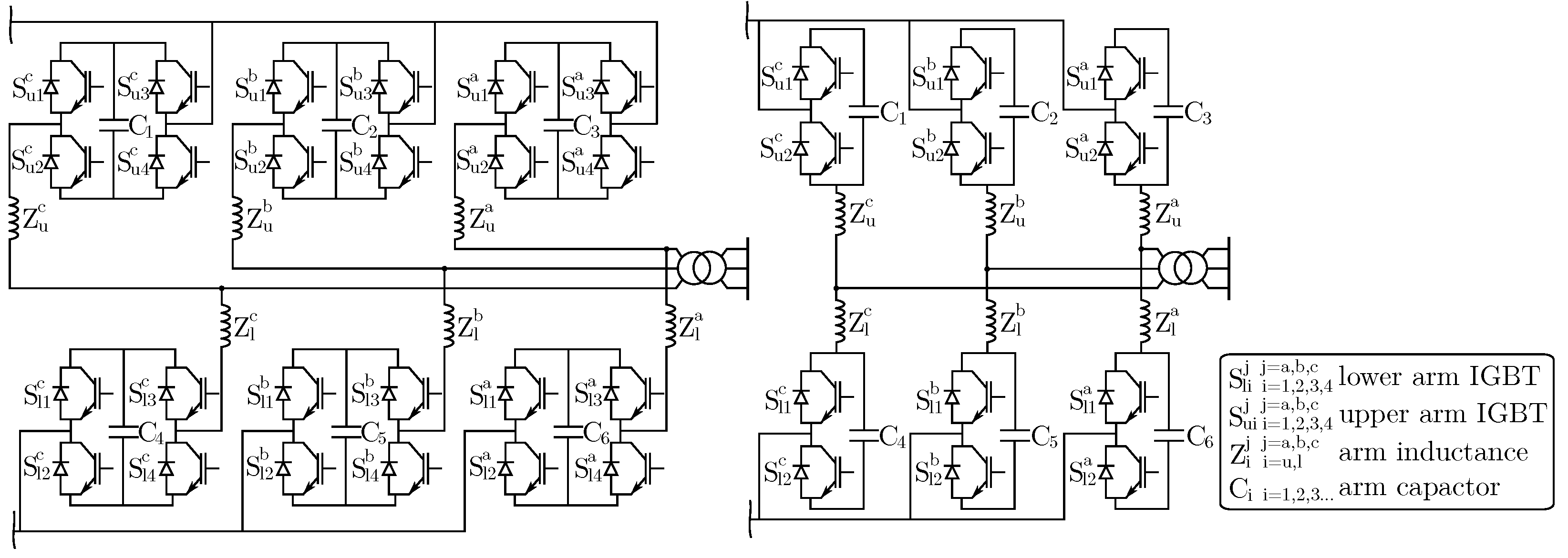
2. MMC with One Cell per Arm
2.1. Converter Concept
2.2. Specifications
- The MMC converter (one cell per arm) includes inner energy controllers, circulating current and relevant controls;
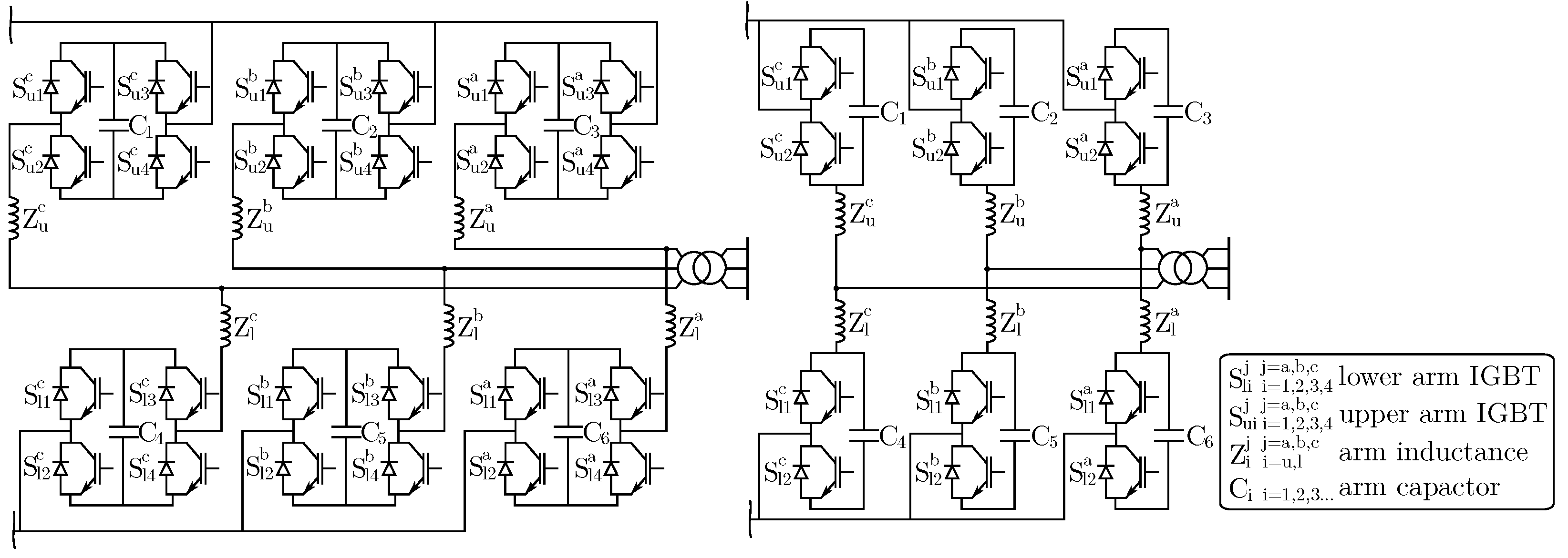
- The converter can be used with half or full bridge cells;
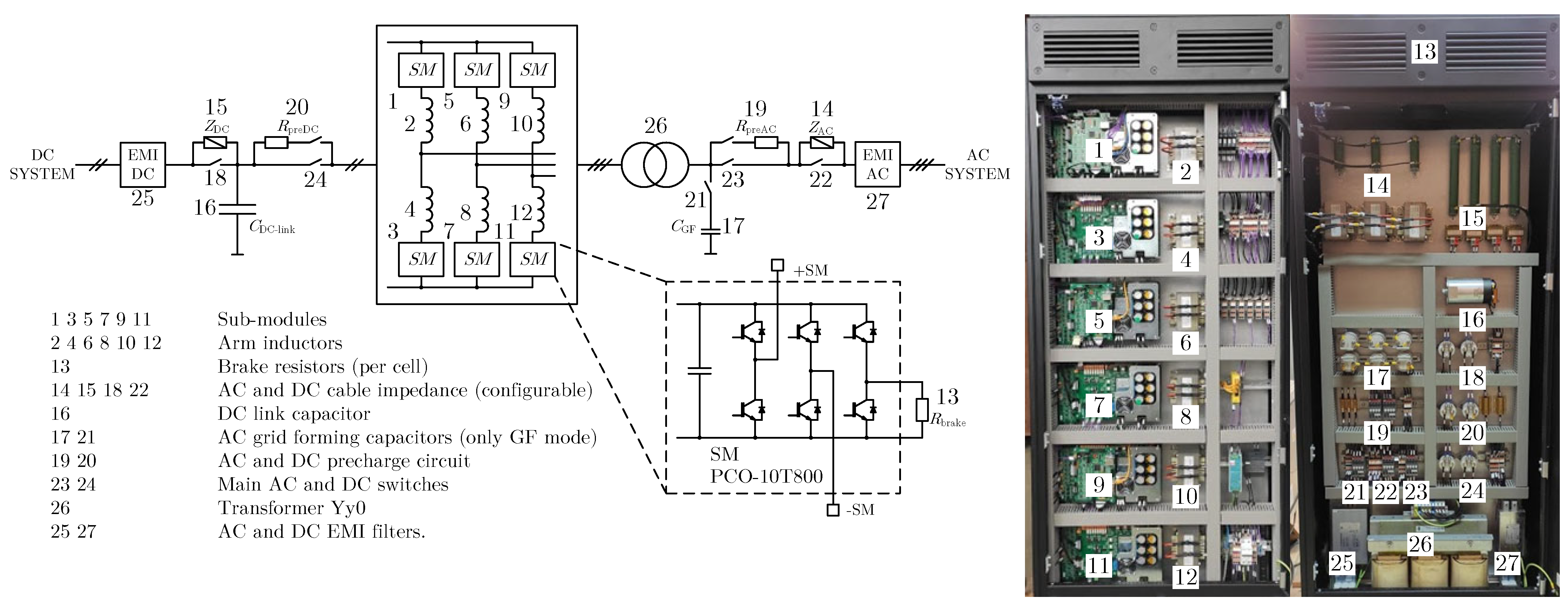
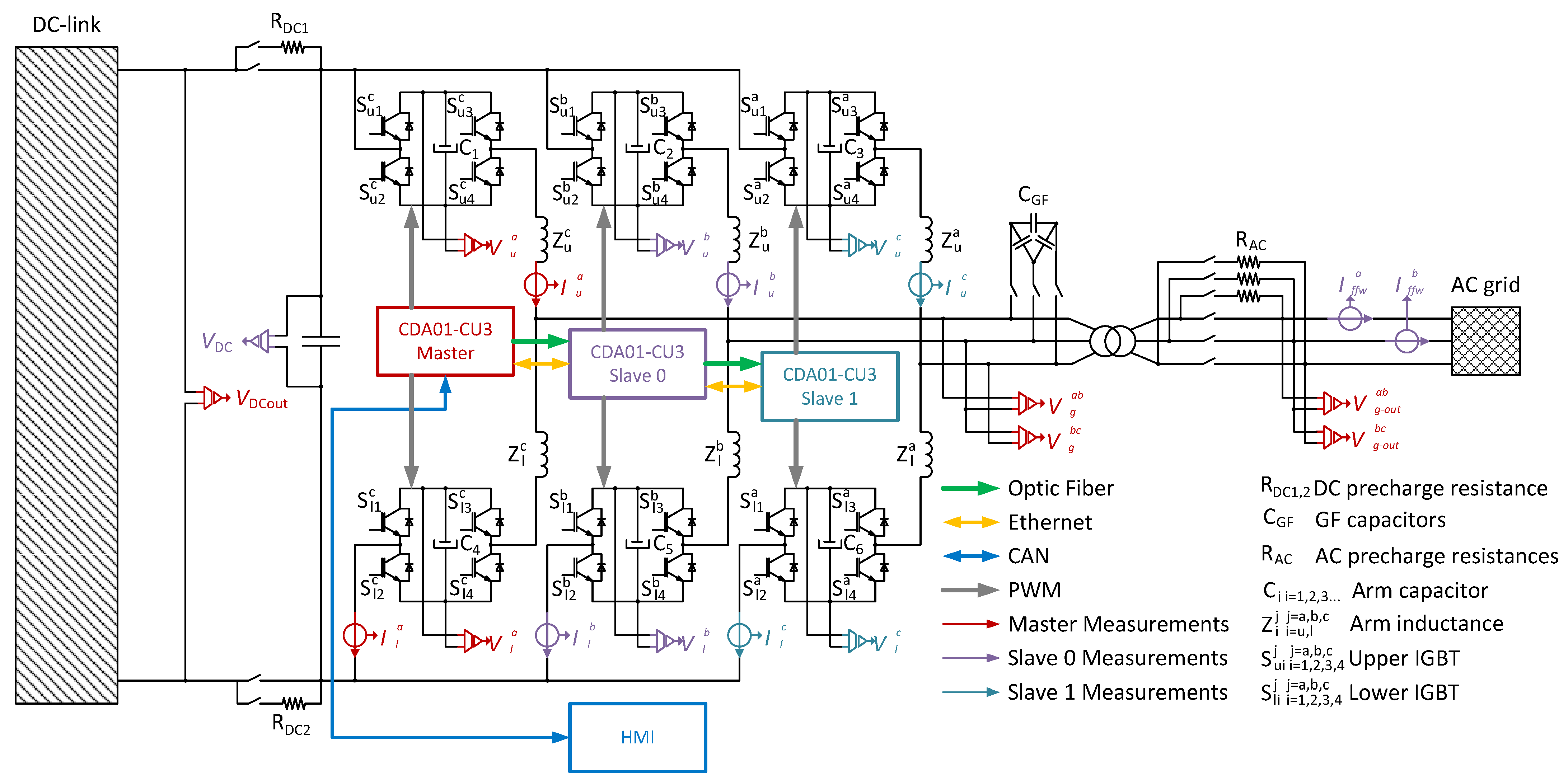
- The converter will be installed in a cabinet including isolation transformers, converter reactors, filters, circuit breakers, measurements and protections;
- The converter rated power is 10 kVA and has to control independently P and Q in rectifier/inverter mode;
- The converter needs to be able to operate in grid-forming and grid-following modes;
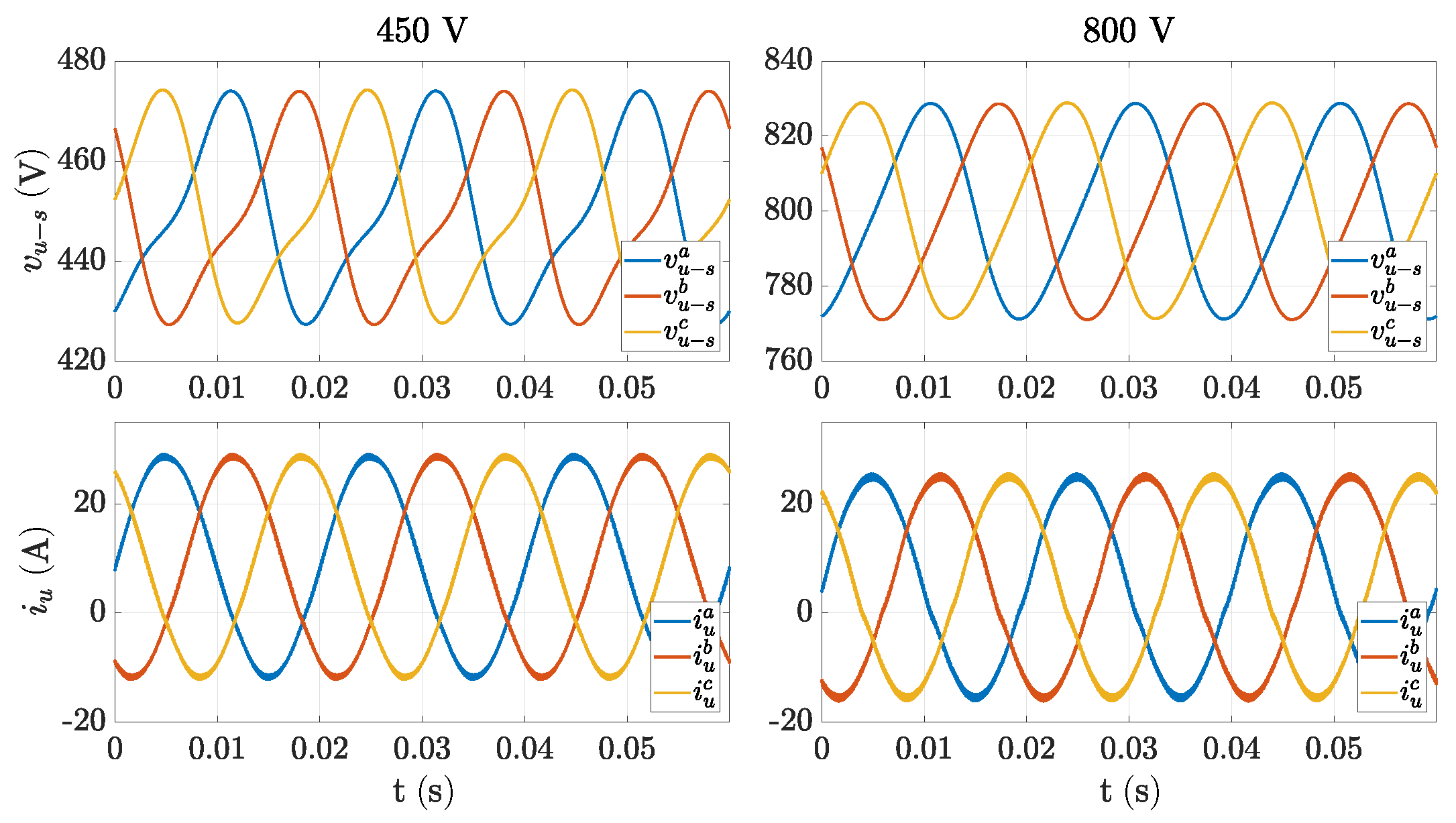
- DC voltage shall be in the range from 450 V to 800 V and the supplied AC voltage is of 400 V (3-ph L-L RMS);
- The converter shall be able to operate at +/−10% of rated AC voltage supply and withstand AC faults.;
- The converter shall be able to operate at the frequencies between 40 and 60 Hz.
2.3. Converter Design
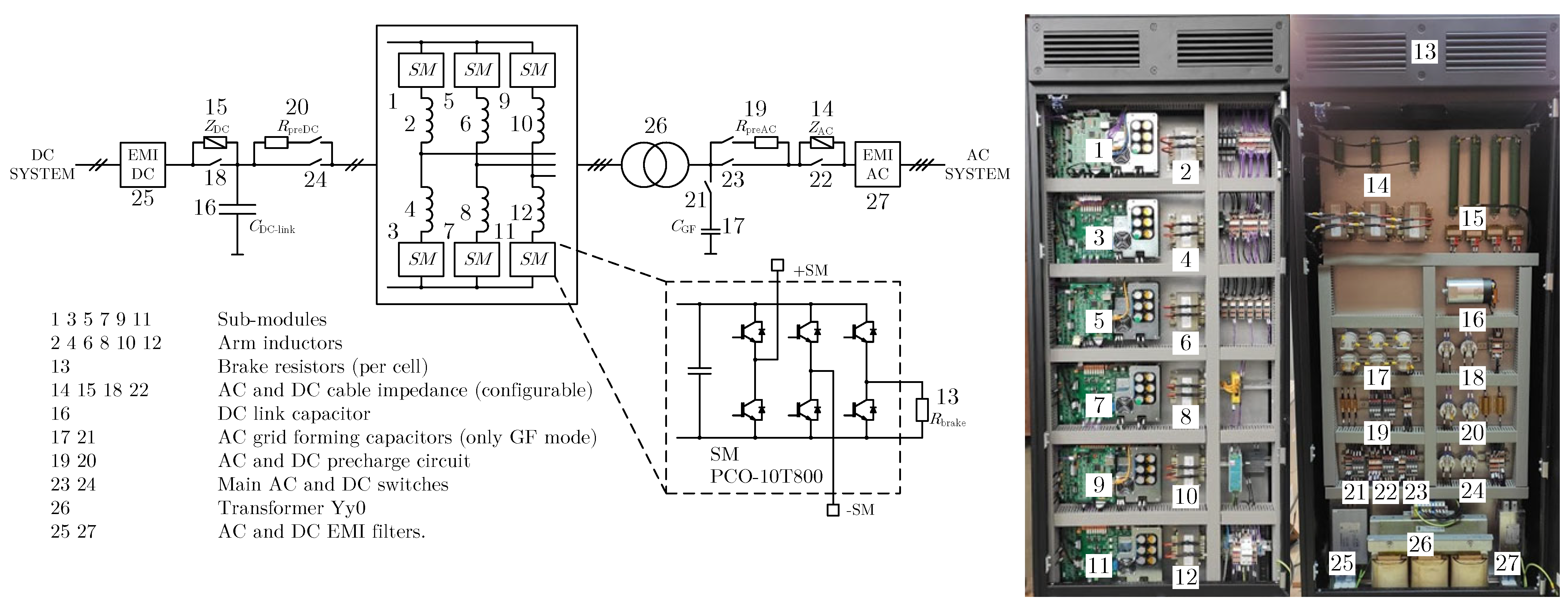
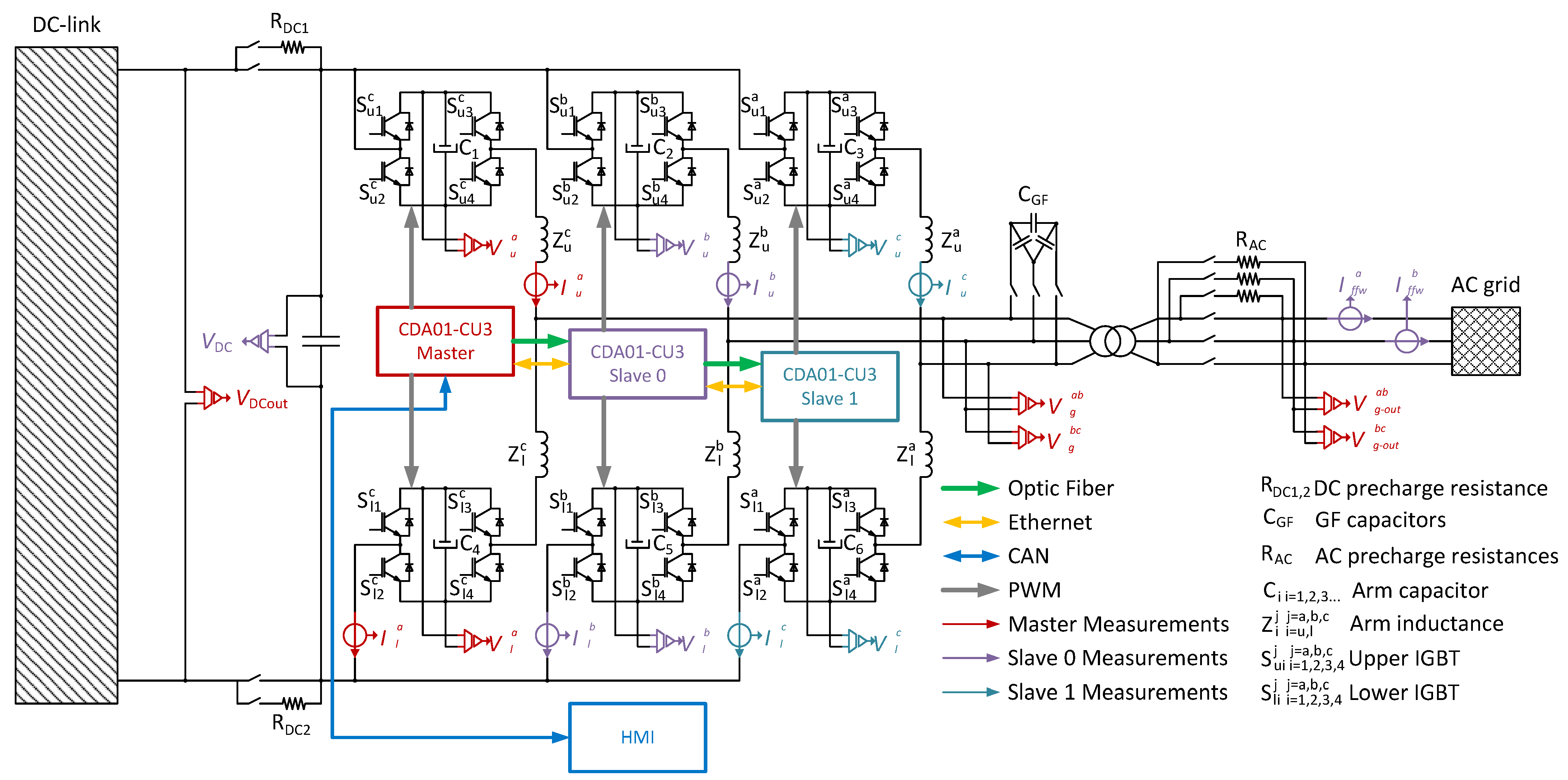
2.3.1. Converter Layout and Power Modules
2.3.2. Arm Inductance Sizing and Selection
2.3.3. Cell Capacitor Sizing and Selection
2.3.4. Converter Control Architecture
3. Control Structure
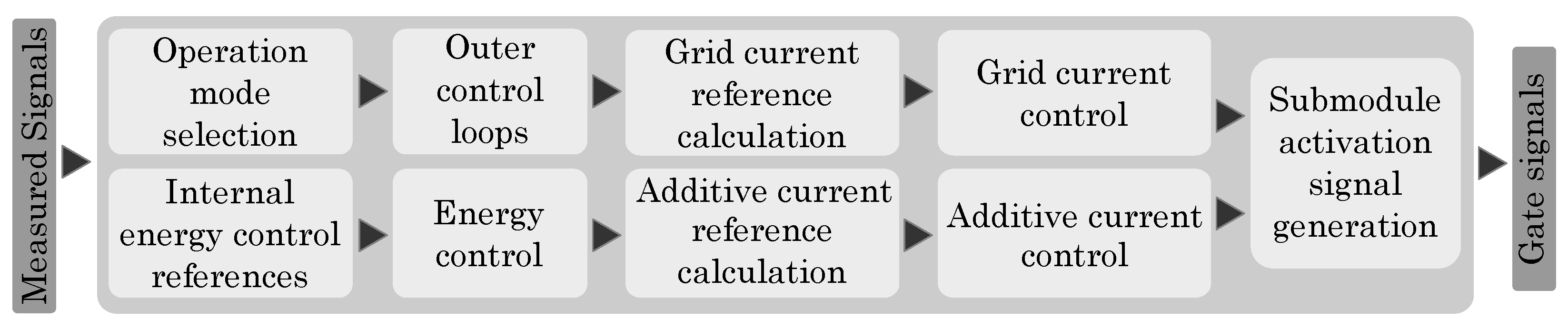
3.1. Overall Control Structure
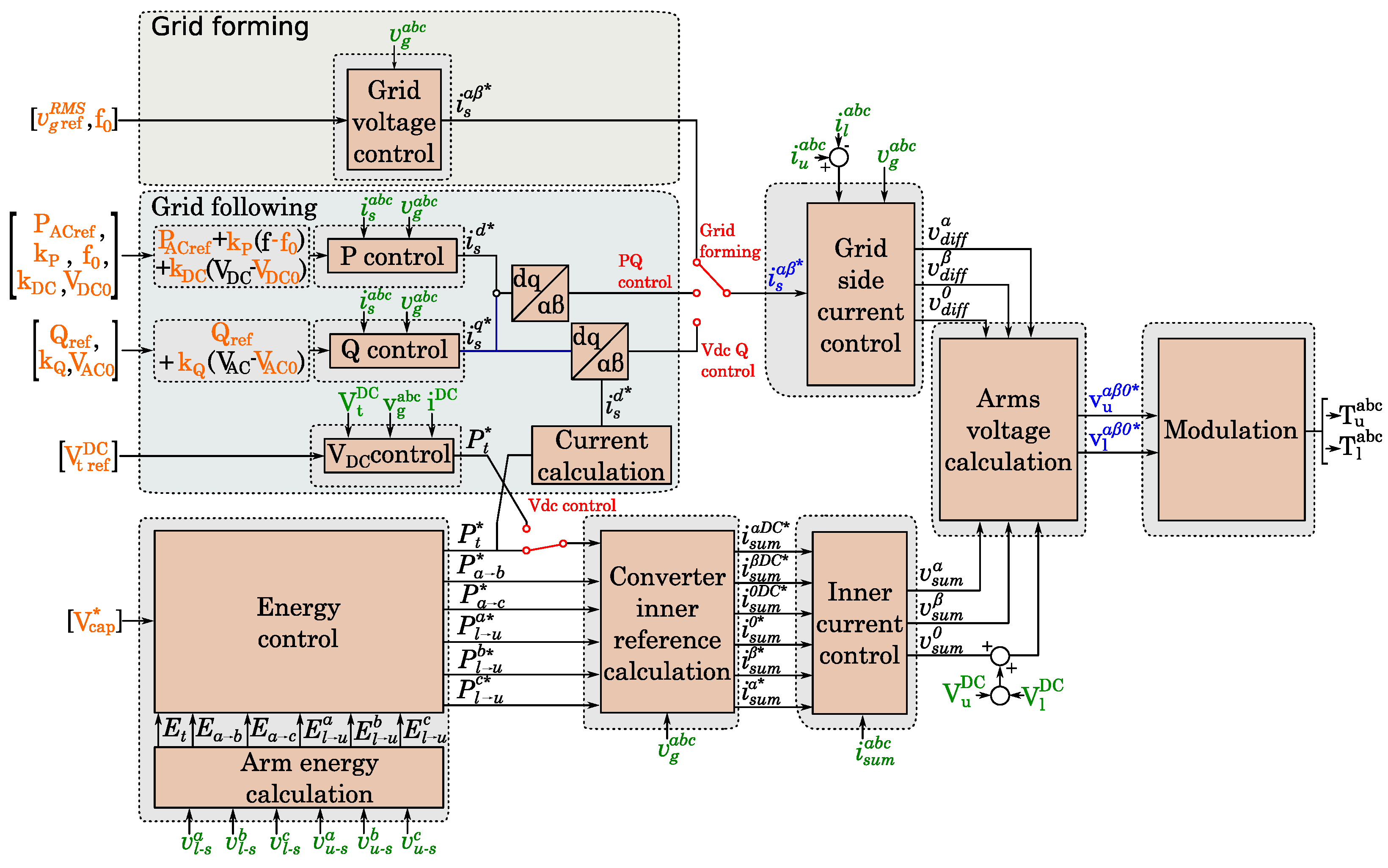
- Grid-following mode: This converter control strategy relies on an existing AC network to implement its controllers. They require a network orientation structure, typically called phase locked loop (PLL), which measures the AC grid voltage, extracting the voltage and angle (and frequency) of the network. The control options considered are the following:
- -
- control: It regulates the active and reactive power exchanged by the converter. This control needs a regulated DC link voltage to operate;
- -
- The -Q control: It regulates the DC link voltage and the reactive power exchanged;
- -
- Supporting controllers: Additional loops to support network AC frequency, AC voltage or a DC distributed voltage droop control could also be included, as supplementary controllers.
- Grid-forming mode: It does not rely on an existing network. The control forms a grid and imposes voltage and angle at the point of connection to the AC network.
3.2. Operating Principle and Modeling
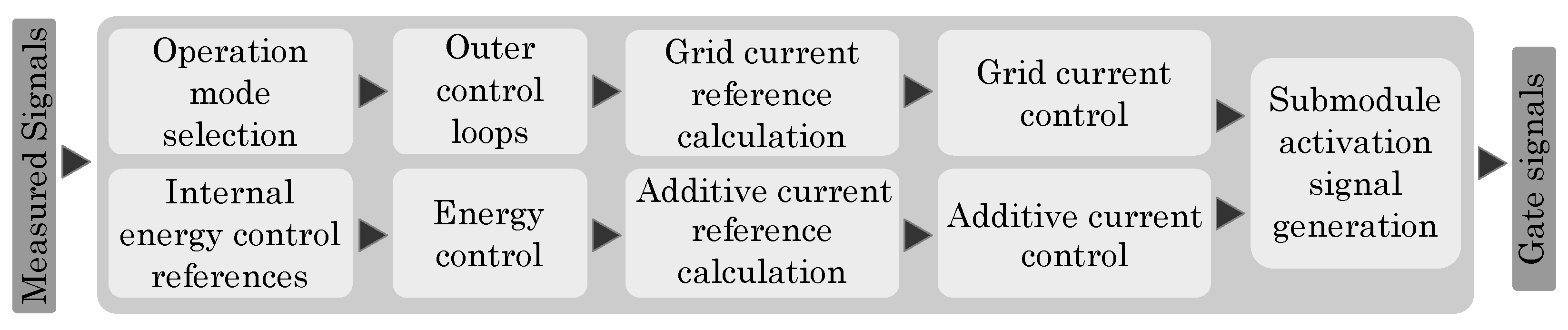
3.3. Control Implementation
- Implement the required control operation mode (grid following or grid forming);
- Control the different degrees of freedom of the MMC by means of specific current components;
- Control the currents flowing through the converter, by means of inner current controllers;
- Balance continuously the energy stored in the converter arms, avoiding large deviations.
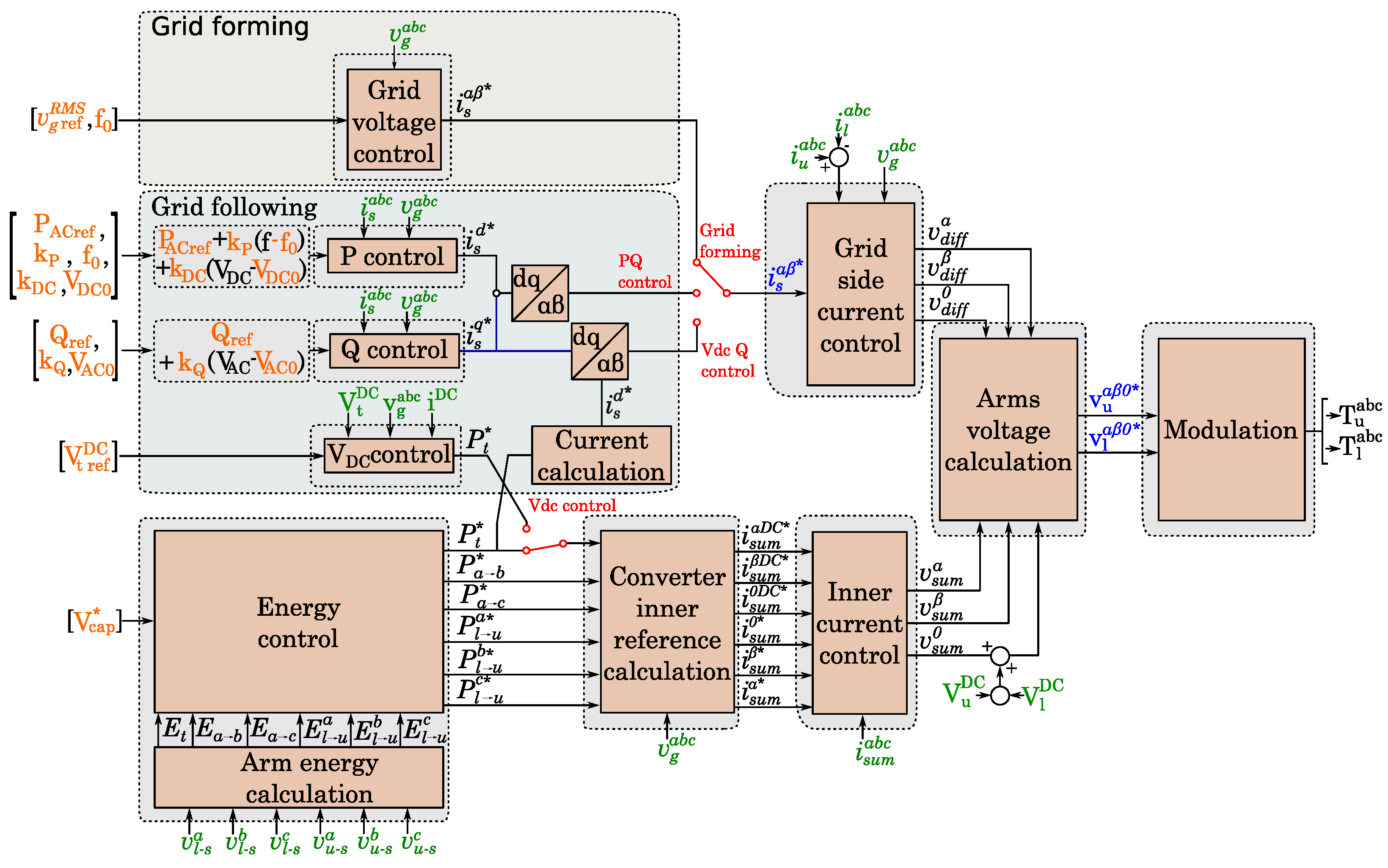
- Current controllers: Grid and additive current regulators able to track AC and DC current references. Controllers should be able to track AC and DC currents in the low ms range (∼1 ms). These controllers are implemented in the stationary reference frame.
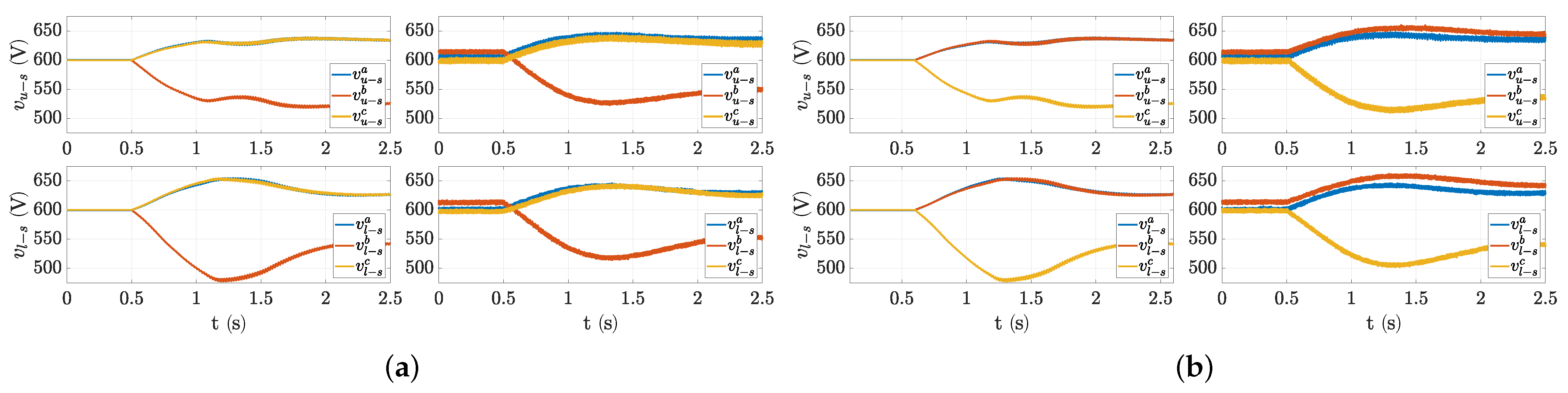
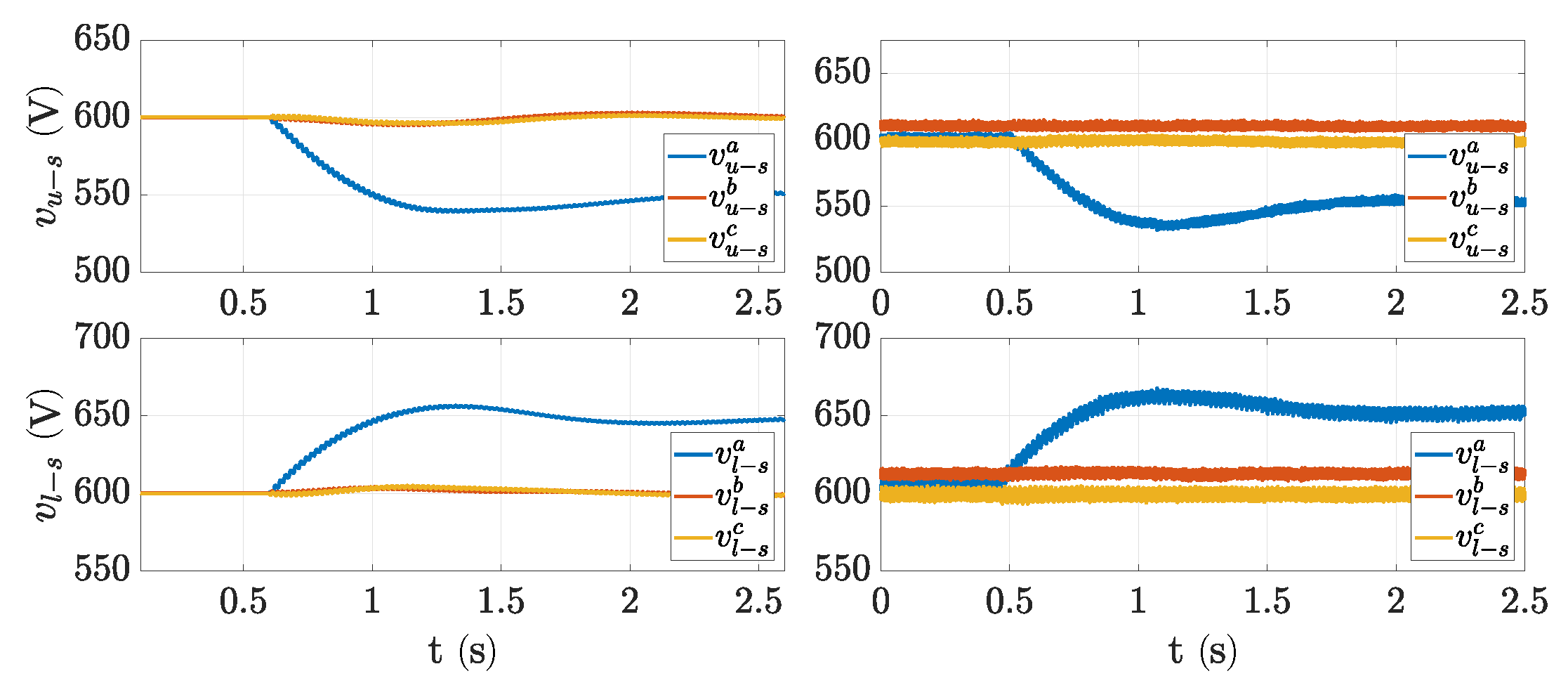
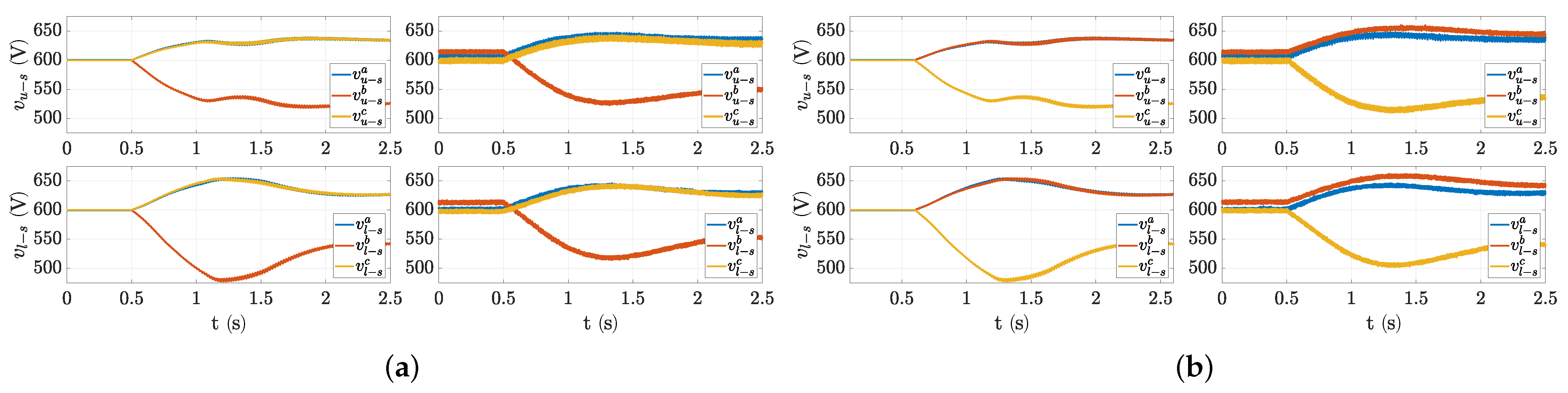
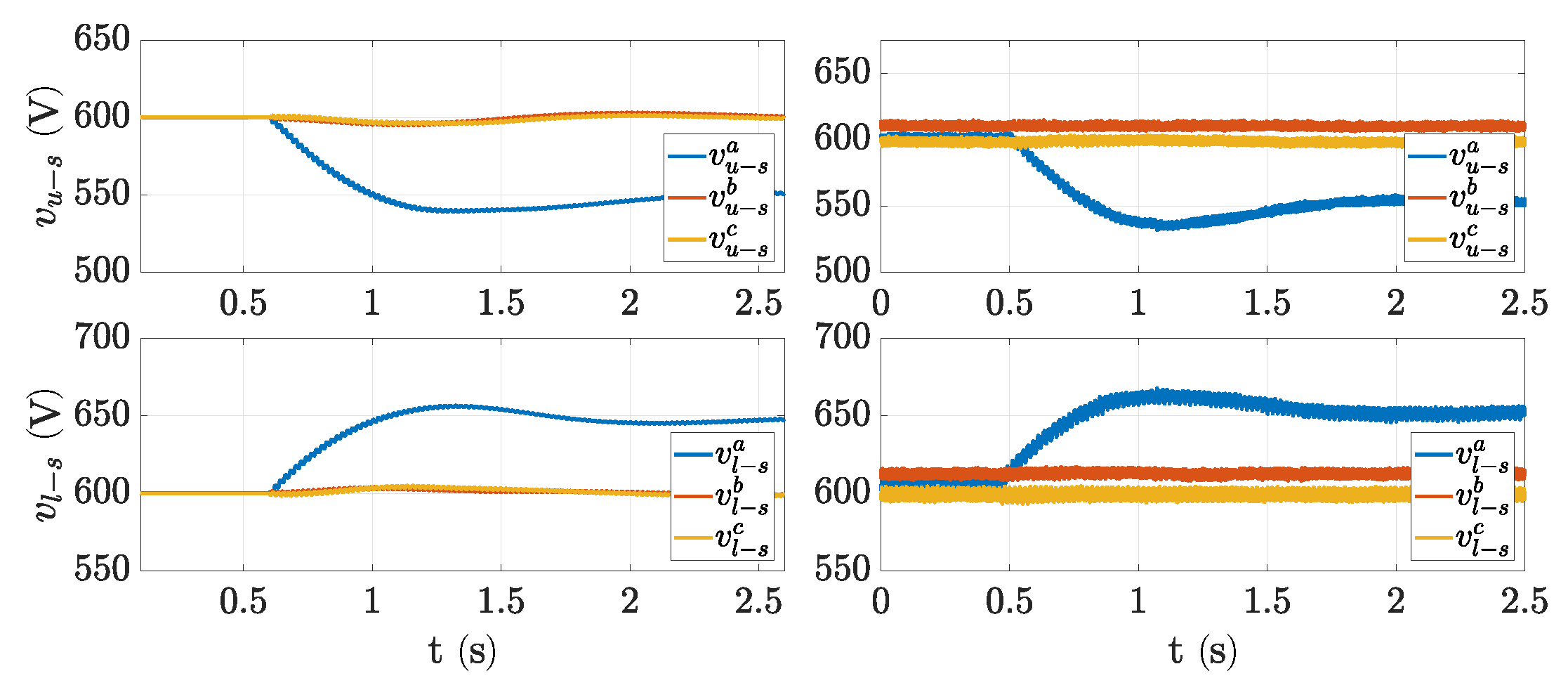
- Energy controllers: Design of the energy regulators to balance the energy stored in the converter arms. Energy controllers are designed to reject disturbances (power imbalances during operation) with a limited deviation (10%) and in a defined time (∼100 ms).
- Outer loops: Implement the defined control mode (grid following, grid forming and additional loops (additional control loops as frequency supporting structures or DC droop controllers can be implemented)) based on its associated controllers. Typically, outer loops are defined to respond slower than the inner current controllers (∼100 ms). The DC voltage and the power controls are designed as explained in [23] and [4], respectively.
- Reference calculation blocks: Grid and additive current reference calculation strategies defined by the outer level controllers.
3.4. Control Boards Synchronization and Communication
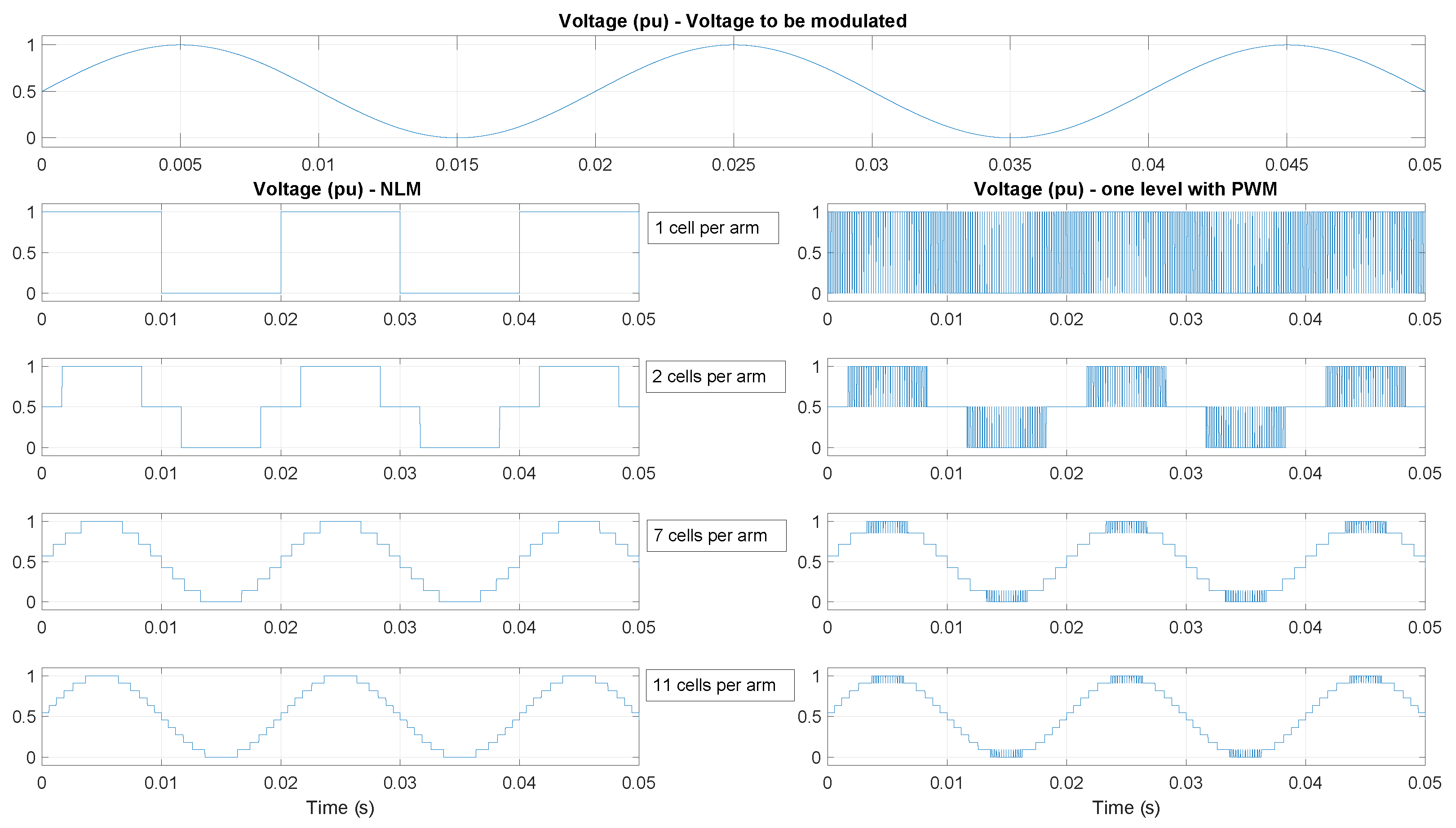
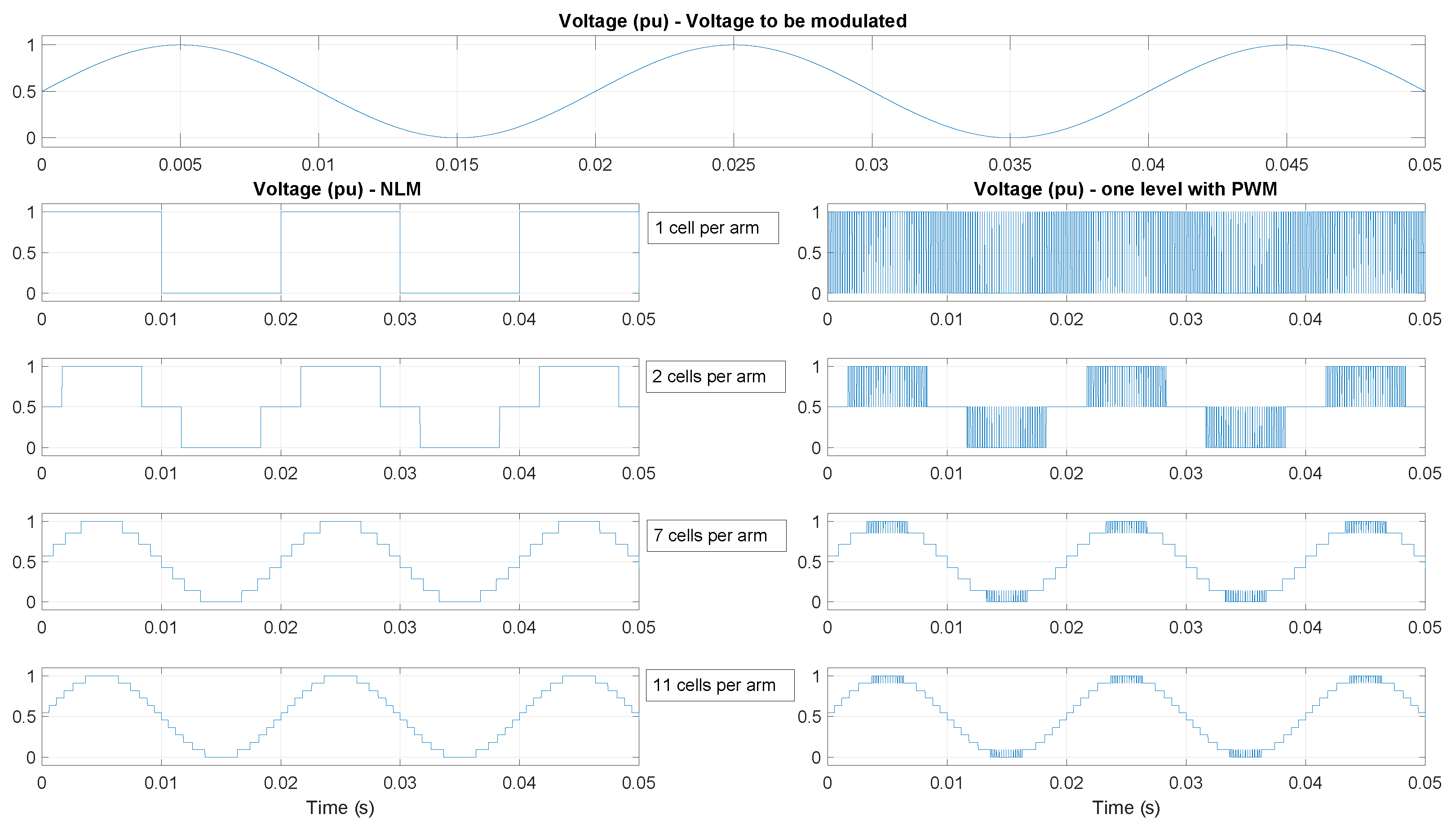
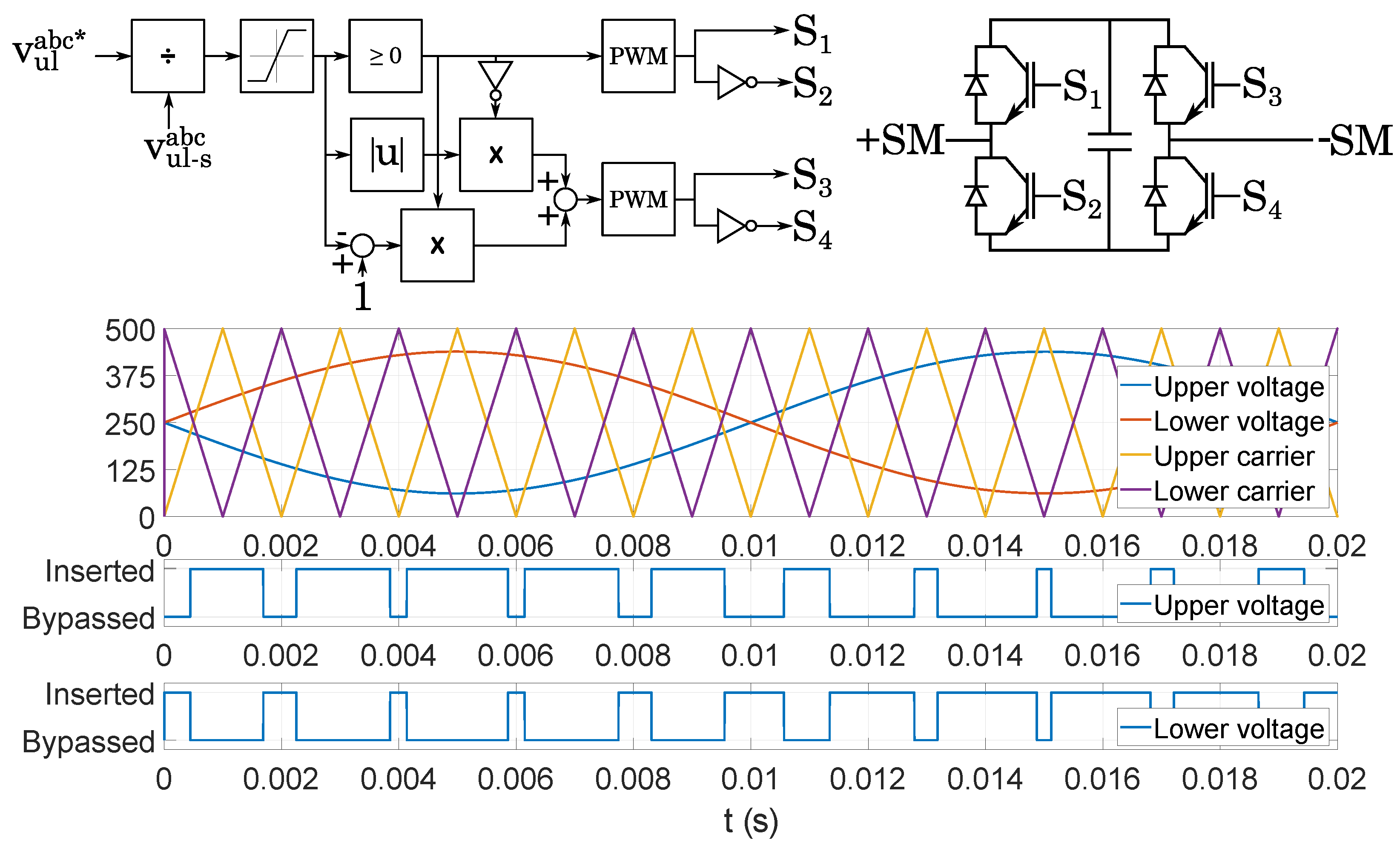
3.5. Cell Modulation
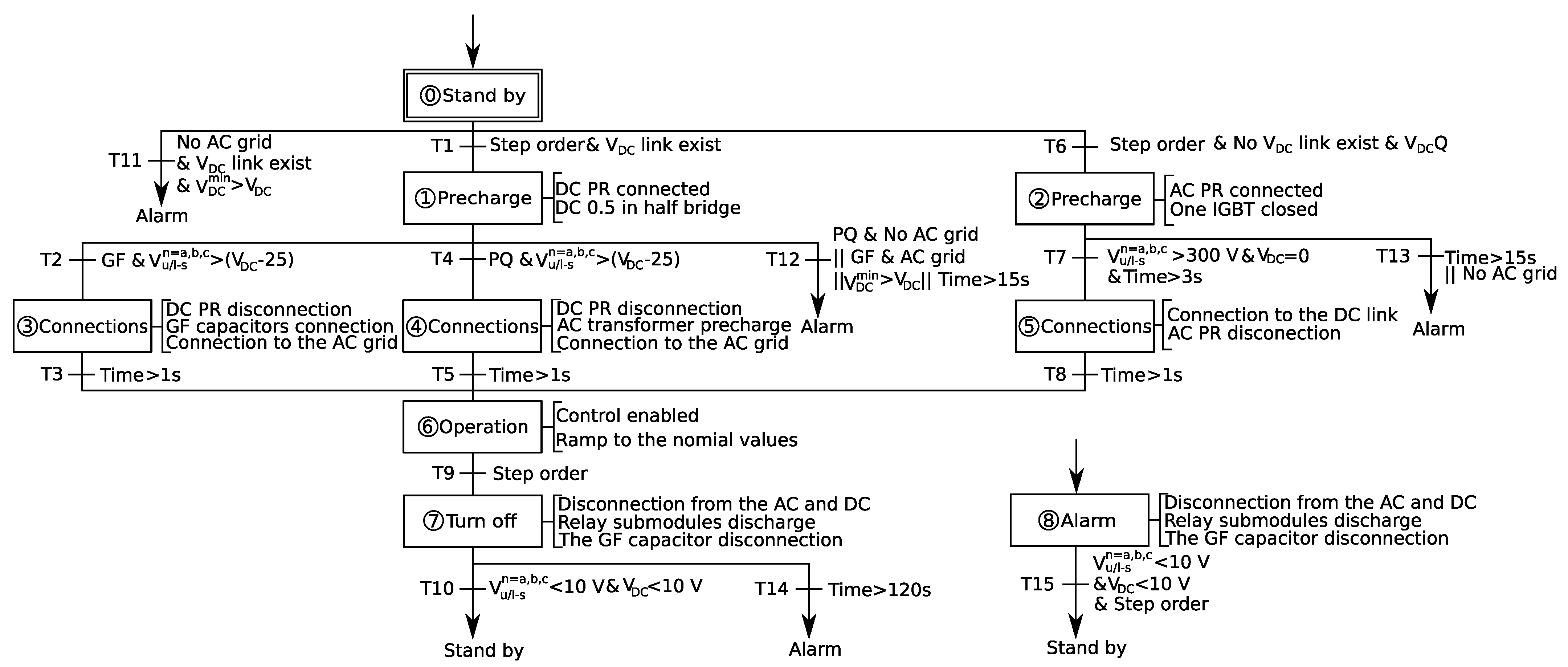
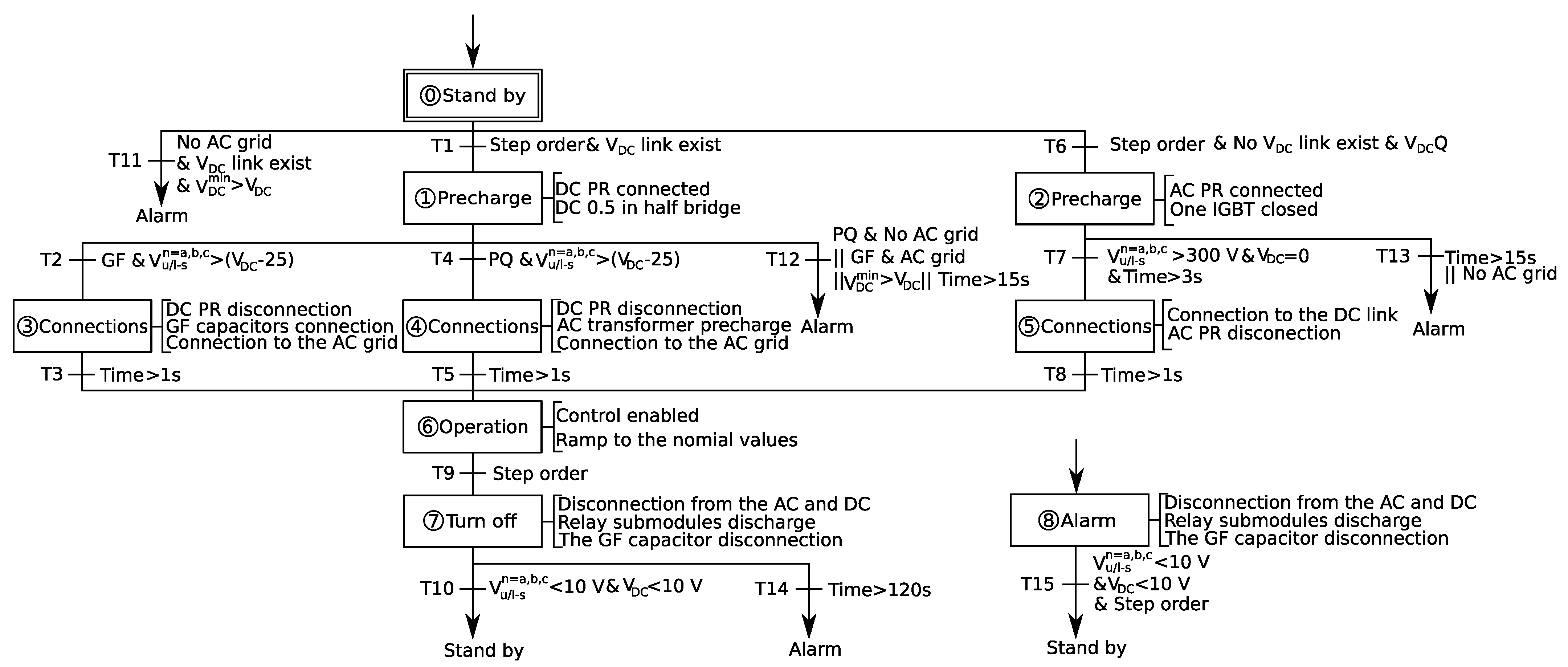
3.6. Start-Up and Shut-Down Sequences
4. Experimental and Simulation Results
4.1. Dynamic Simulation Model
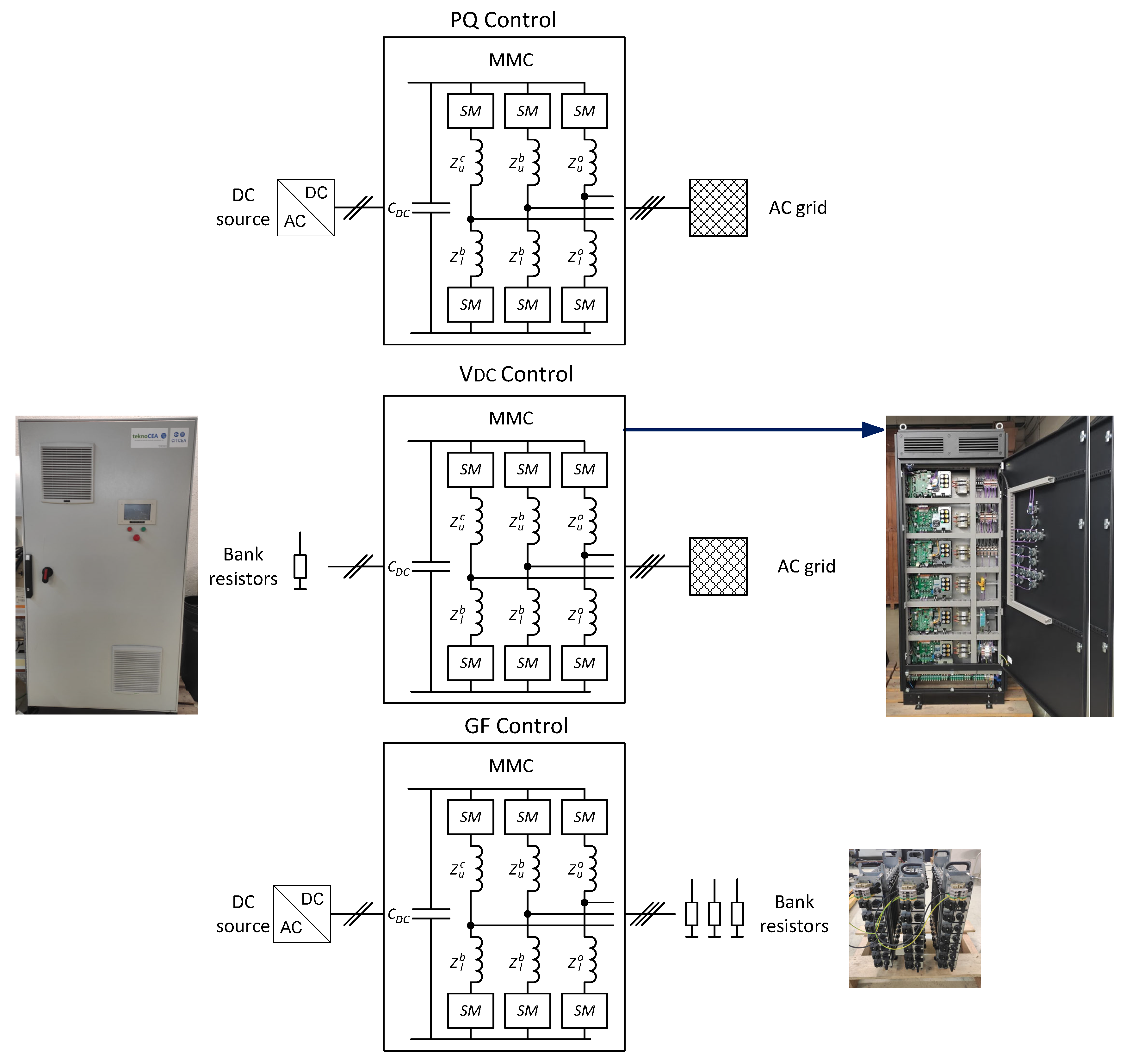
4.2. Experimental Setup Description
4.3. Validation of Cell Energy Controllers
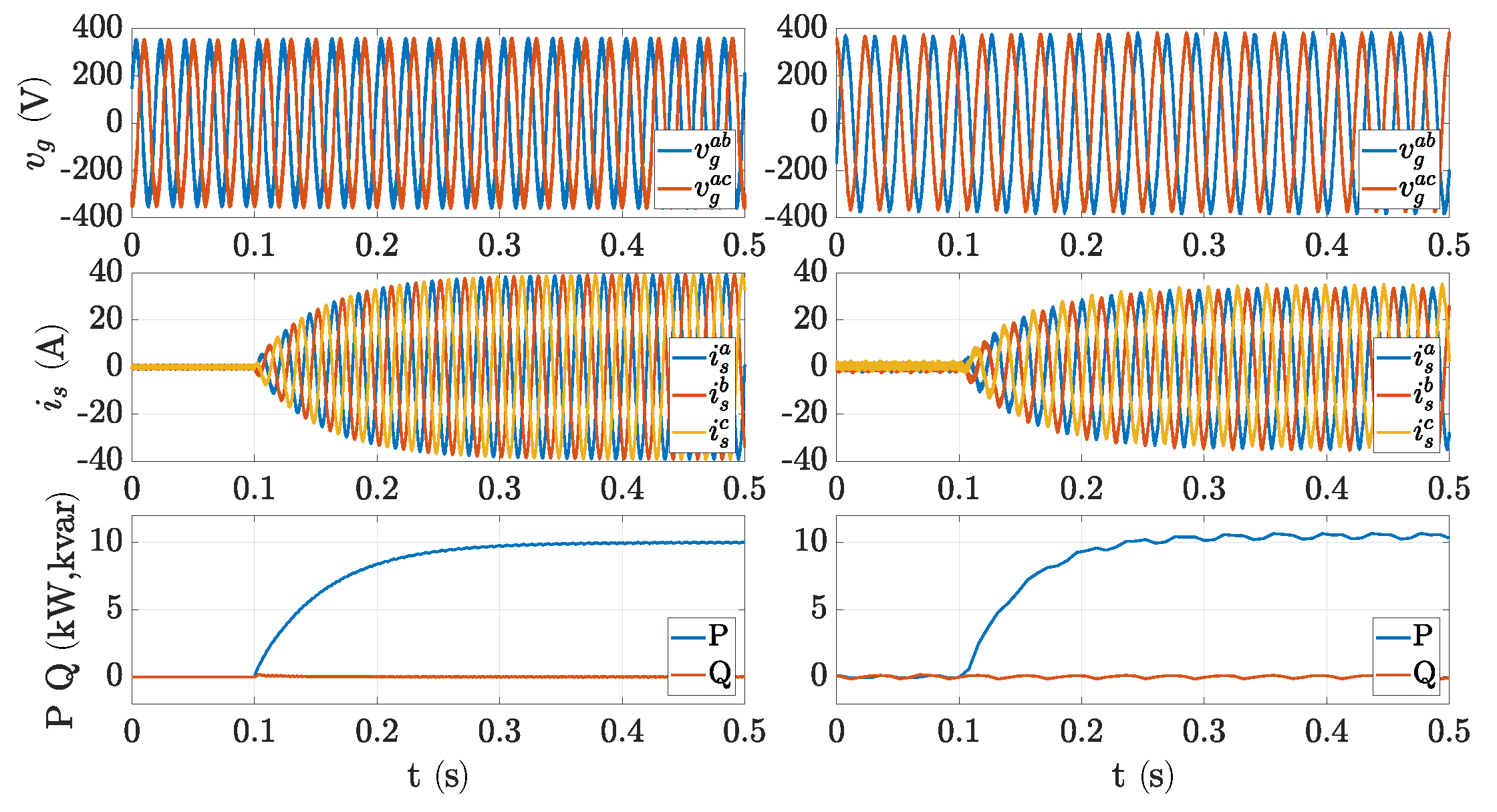
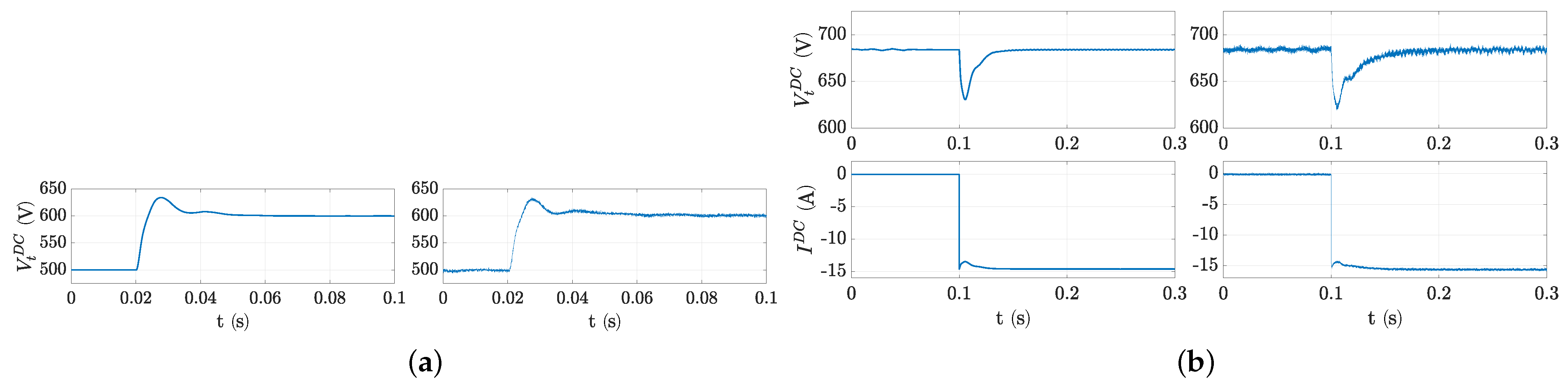
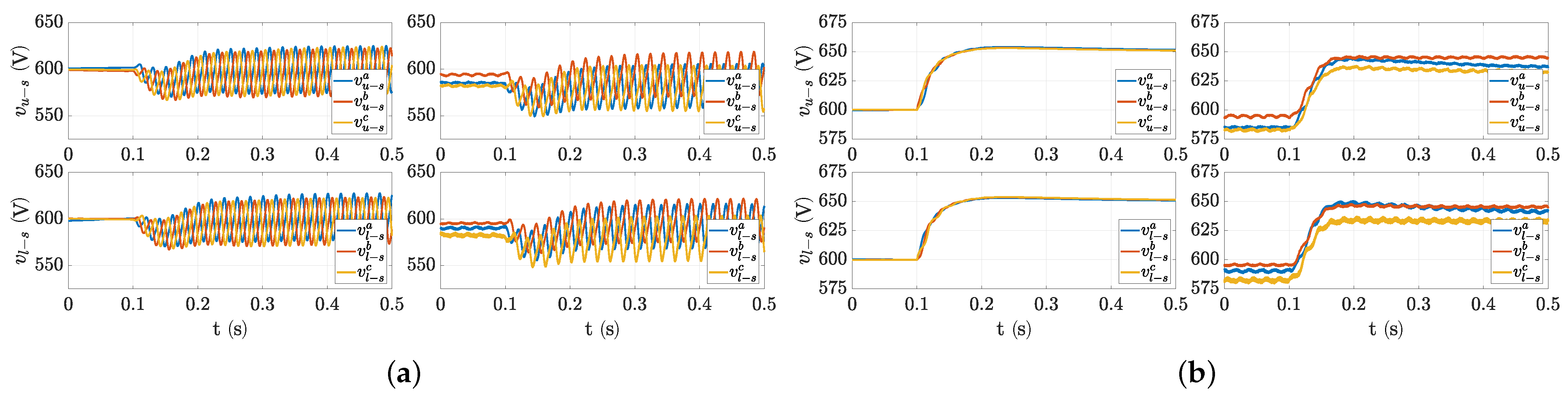
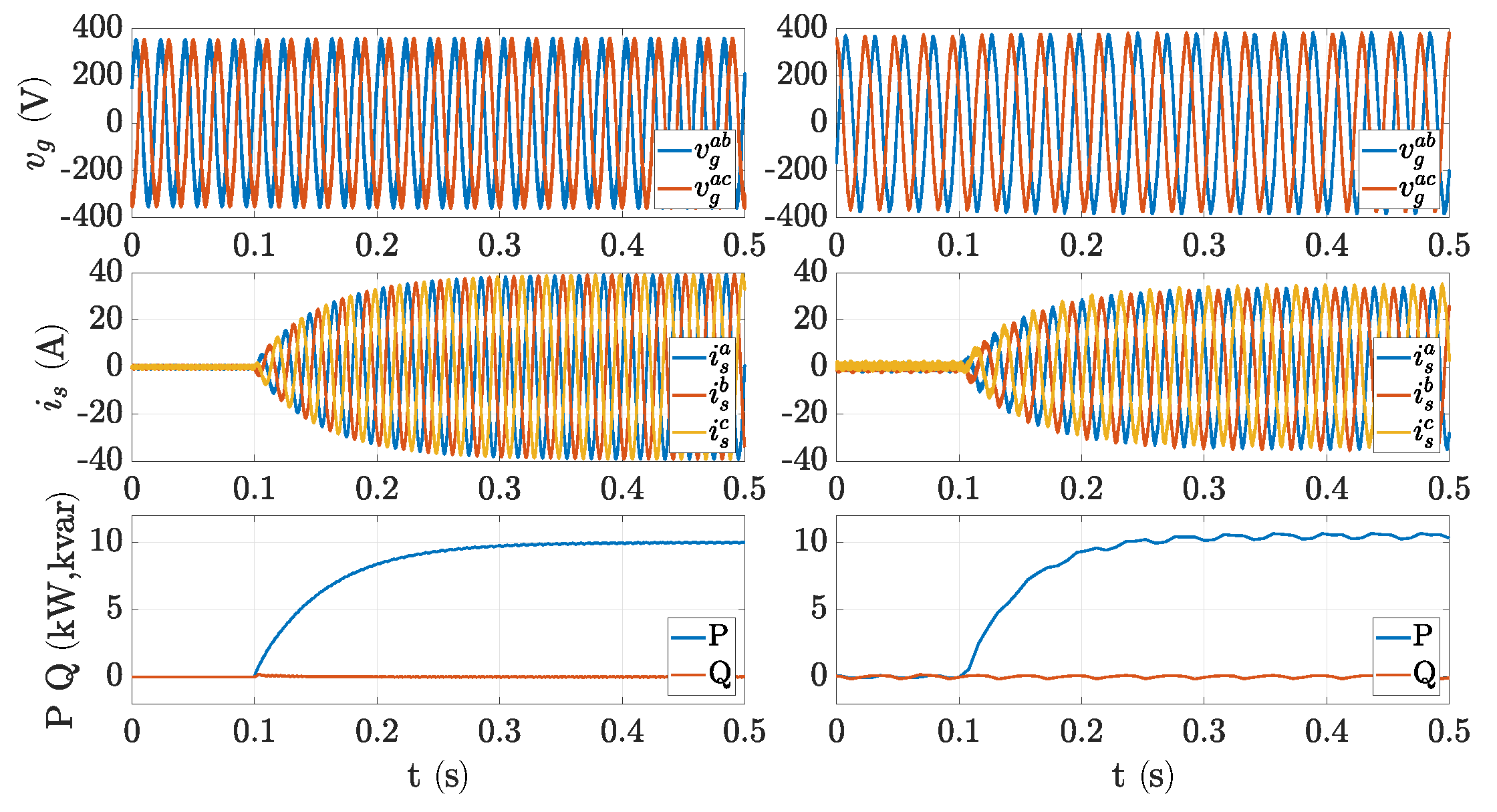
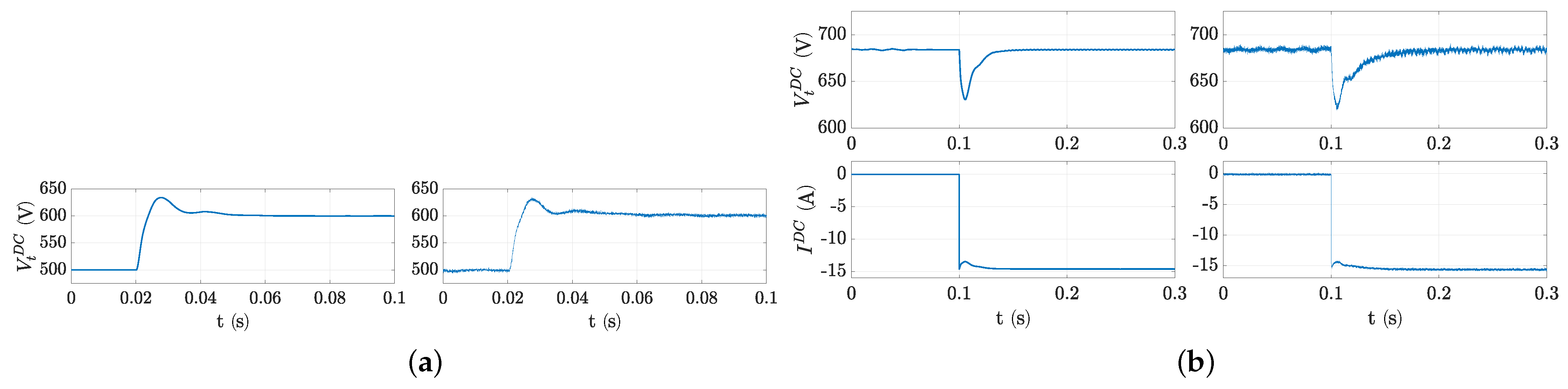
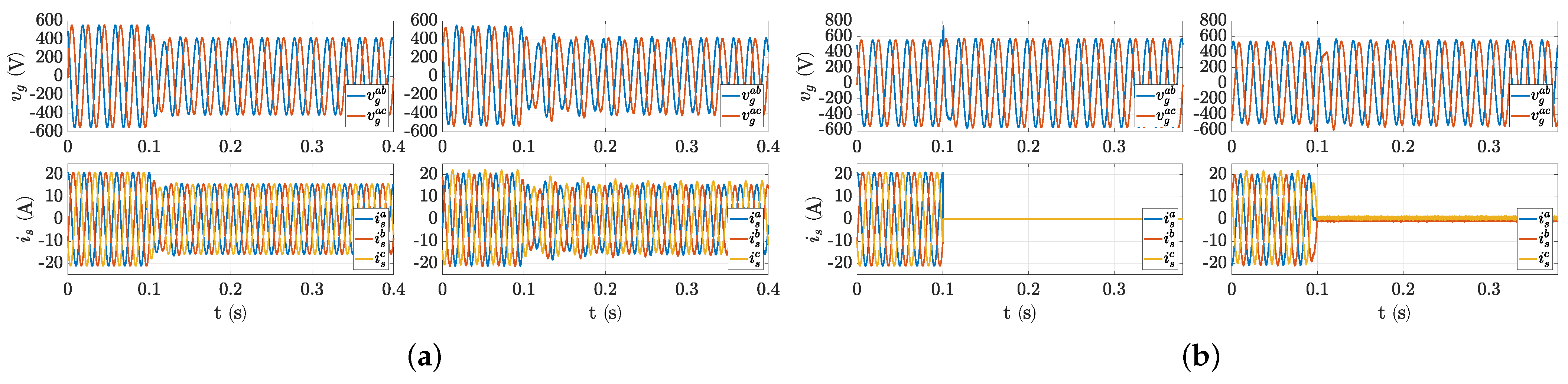
4.4. Validation of MMC Converter Grid-Following PQ, VdcQ and Grid-Forming Control
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MMC | modular multilevel converters |
| HVDC | high-voltage direct current |
| STATCOM | static synchronous compensator |
| NLM | nearest level modulation |
| PWM | pulse width modulation |
| FACTS | flexible alternating current transmission system |
| VSC | voltage source converter |
| AC | alternating current |
| DC | direct current |
| LCC | line commutated converter |
| IGBT | insulated gate bipolar transistor |
| HMI | human–machine interface |
| PTP | precision time protocol |
| CAN | controller area network |
| PLL | phase locked loop |
| PR | preload resistances |
| GF | grid forming |
| SM | submodule |
References
- Sharifabadi, S.; Harnefors, L.; Nee, H.; Norrga, S.; Teodorrescu, R. Design, Control, and Application of Modular Multilevel Converters for HVDC Transmission Systems; Wiley: Hoboken, NJ, USA, 2016; 412p. [Google Scholar]
- Van Hertem, D.; Gomis-Bellmunt, O.; Liang, J. HVDC Grids: For Offshore and Supergrid of the Future; Wiley: Hoboken, NJ, USA, 2016; pp. 3–24. [Google Scholar] [CrossRef]
- Zhang, H.; Belhaouane, M.M.; Colas, F.; Kadri, R.; Gruson, F.; Guillaud, X. On Comprehensive Description and Analysis of MMC Control Design: Simulation and Experimental Study. IEEE Trans. Power Deliv. 2021, 36, 244–253. [Google Scholar] [CrossRef]
- Prieto-Araujo, E.; Junyent-Ferré, A.; Collados-Rodríguez, C.; Clariana-Colet, G.; Gomis-Bellmunt, O. Control design of Modular Multilevel Converters in normal and AC fault conditions for HVDC grids. Electr. Power Syst. Res. 2017, 152, 424–437. [Google Scholar] [CrossRef] [Green Version]
- Judge, P.D.; Chaffey, G.; Merlin, M.M.; Clemow, P.R.; Green, T.C. Dimensioning and modulation index selection for the hybrid modular multilevel converter. IEEE Trans. Power Electron. 2018, 33, 3837–3851. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Wang, P.; Chu, Z.; Zhu, H.; Luo, Y.; Li, Y. An inner current suppressing method for modular multilevel converters. IEEE Trans. Power Electron. 2013, 28, 4873–4879. [Google Scholar] [CrossRef]
- Hagiwara, M.; Akagi, H. Control and Experiment of Pulsewidth-Modulated Modular Multilevel Converters. IEEE Trans. Power Electron. 2009, 24, 1737–1746. [Google Scholar] [CrossRef]
- Zhong, Y.; Roscoe, N.; Holliday, D.; Lim, T.C.; Finney, S.J. High-Efficiency mosfet-Based MMC Design for LVDC Distribution Systems. IEEE Trans. Ind. Appl. 2018, 54, 321–334. [Google Scholar] [CrossRef]
- Ilves, K.; Antonopoulos, A.; Norrga, S.; Nee, H.P. A new modulation method for the modular multilevel converter allowing fundamental switching frequency. IEEE Trans. Power Electron. 2012, 27, 3482–3494. [Google Scholar] [CrossRef]
- Peftitsis, D.; Tolstoy, G.; Antonopoulos, A.; Rabkowski, J.; Lim, J.K.; Bakowski, M.; Ängquist, L.; Nee, H.P. High-power modular multilevel converters with SiC JFETs. IEEE Trans. Power Electron. 2012, 27, 28–36. [Google Scholar] [CrossRef] [Green Version]
- Moranchel, M.; Sanchez, F.M.; Bueno, E.J.; Rodriguez, F.J.; Sanz, I. Six-level modular multilevel converter prototype with centralized hardware platform controller. In Proceedings of the IECON 2015—41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 3863–3868. [Google Scholar] [CrossRef]
- Quraan, M.; Tricoli, P.; D’Arco, S.; Piegari, L. Efficiency Assessment of Modular Multilevel Converters for Battery Electric Vehicles. IEEE Trans. Power Electron. 2017, 32, 2041–2051. [Google Scholar] [CrossRef]
- Yang, L.; Li, Y.; Li, Z.; Wang, P.; Xu, S.; Gou, R. Loss Optimization of MMC by Second-Order Harmonic Circulating Current Injection. IEEE Trans. Power Electron. 2018, 33, 5739–5753. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, H.; Wang, Z.; Blaabjerg, F.; Saeedifard, M. System-level power loss evaluation of modular multilevel converters. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition, ECCE 2019, Baltimore, MD, USA, 29 September–3 October 2019; pp. 6797–6804. [Google Scholar] [CrossRef]
- Taffese, A.A.; De Jong, E.; D’Arco, S.; Tedeschi, E. Online Parameter Adjustment Method for Arm Voltage Estimation of the Modular Multilevel Converter. IEEE Trans. Power Electron. 2019, 34, 12491–12503. [Google Scholar] [CrossRef]
- Liu, Z.; Li, K.; Sun, Y.; Wang, J.; Wang, Z.; Sun, K.; Wang, M. A Steady-State Analysis Method for Modular Multilevel Converters Connected to Permanent Magnet Synchronous Generator-Based Wind Energy Conversion Systems. Energies 2018, 11, 461. [Google Scholar] [CrossRef] [Green Version]
- Cheng, Q.; Wang, C.; Wang, J. Analysis on Displacement Angle of Phase-Shifted Carrier PWM for Modular Multilevel Converter. Energies 2020, 13, 6743. [Google Scholar] [CrossRef]
- Wang, S.; Alsokhiry, F.S.; Adam, G.P. Impact of Submodule Faults on the Performance of Modular Multilevel Converters. Energies 2020, 13, 4089. [Google Scholar] [CrossRef]
- Wu, W.; Wu, X.; Yin, J.; Jing, L.; Wang, S.; Li, J. Characteristic Analysis and Fault-Tolerant Control of Circulating Current for Modular Multilevel Converters under Sub-Module Faults. Energies 2017, 10, 1827. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.; Lin, H.; Wang, Z.; Ze, Z. Modified State-of-Charge Balancing Control of Modular Multilevel Converter with Integrated Battery Energy Storage System. Energies 2019, 12, 96. [Google Scholar] [CrossRef] [Green Version]
- TeknoCEA. PCO-10T800 Brochure. 2015. Available online: https://www.teknocea.cat/file/95a1828740ccf46486c48efd0c0442827d5f8c7e/MAS_BRO_PCO-10T800v3_R1_2015_09_03.pdf (accessed on 17 December 2020).
- TeknoCEA. CDA01-CU3 Brochure. 2015. Available online: https://teknocea.cat (accessed on 17 December 2020).
- Sánchez-Sánchez, E.; Prieto-Araujo, E.; Junyent-Ferré, A.; Gomis-Bellmunt, O. Analysis of MMC Energy-Based Control Structures for VSC-HVDC Links. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1065–1076. [Google Scholar] [CrossRef] [Green Version]
- Alimeling, J.H.; Hammer, W.P. PLECS-piece-wise linear electrical circuit simulation for Simulink. In Proceedings of the IEEE 1999 International Conference on Power Electronics and Drive Systems, PEDS’99 (Cat. No.99TH8475), Hong Kong, China, 27–29 July 1999; Volume 1, pp. 355–360. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Proposed Converter | MMC | Other Prototypes Presented [3,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20] | Two-Level VSC | |
|---|---|---|---|---|
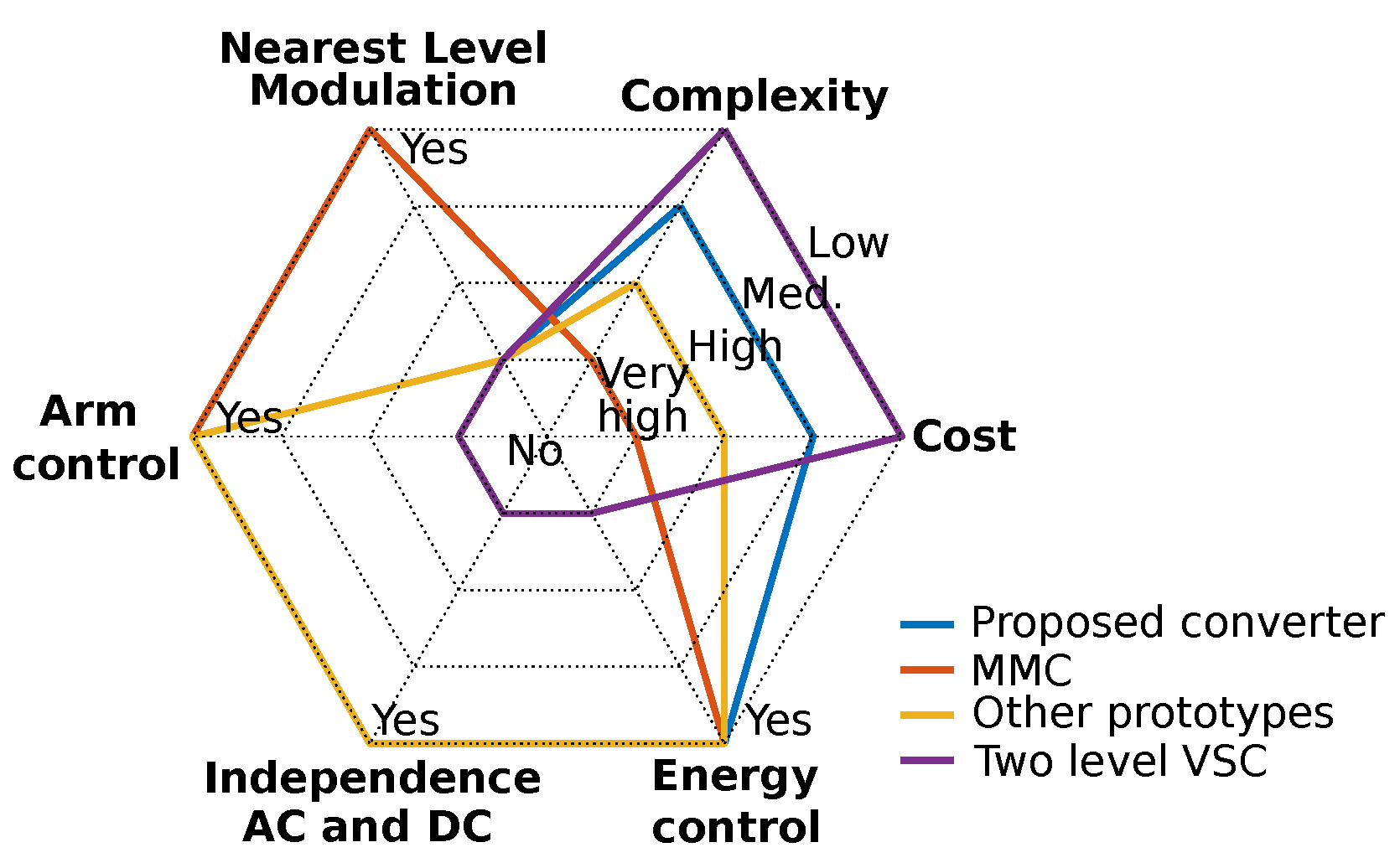
| Complexity | Medium | Very high | High | Low |
| Cost | Medium | Very high | High | Low |
| Energy control | Yes | Yes | Yes | No |
| Independence between AC and DC power | Yes | Yes | Yes | No |
| Arm voltage control | Yes | Yes | Yes | No |
| Nearest Level Modulation | No | Yes | No | No |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Girona-Badia, J.; Gomis-Bellmunt, O.; Lledó-Ponsati, T.; Capó-Lliteras, M.; Collados-Rodriguez, C.; Cutululis, N.A.; Saborío-Romano, O.; Montesinos-Miracle, D.; Pagès, M.; Heredero-Peris, D.; et al. Design, Control and Testing of a Modular Multilevel Converter with a Single Cell per Arm in Grid-Forming and Grid-Following Operations for Scaled-Down Experimental Platforms. Energies 2022, 15, 1819. https://doi.org/10.3390/en15051819
Girona-Badia J, Gomis-Bellmunt O, Lledó-Ponsati T, Capó-Lliteras M, Collados-Rodriguez C, Cutululis NA, Saborío-Romano O, Montesinos-Miracle D, Pagès M, Heredero-Peris D, et al. Design, Control and Testing of a Modular Multilevel Converter with a Single Cell per Arm in Grid-Forming and Grid-Following Operations for Scaled-Down Experimental Platforms. Energies. 2022; 15(5):1819. https://doi.org/10.3390/en15051819
Chicago/Turabian StyleGirona-Badia, Jaume, Oriol Gomis-Bellmunt, Tomàs Lledó-Ponsati, Macià Capó-Lliteras, Carlos Collados-Rodriguez, Nicolaos Antonio Cutululis, Oscar Saborío-Romano, Daniel Montesinos-Miracle, Marc Pagès, Daniel Heredero-Peris, and et al. 2022. "Design, Control and Testing of a Modular Multilevel Converter with a Single Cell per Arm in Grid-Forming and Grid-Following Operations for Scaled-Down Experimental Platforms" Energies 15, no. 5: 1819. https://doi.org/10.3390/en15051819
APA StyleGirona-Badia, J., Gomis-Bellmunt, O., Lledó-Ponsati, T., Capó-Lliteras, M., Collados-Rodriguez, C., Cutululis, N. A., Saborío-Romano, O., Montesinos-Miracle, D., Pagès, M., Heredero-Peris, D., & Prieto-Araujo, E. (2022). Design, Control and Testing of a Modular Multilevel Converter with a Single Cell per Arm in Grid-Forming and Grid-Following Operations for Scaled-Down Experimental Platforms. Energies, 15(5), 1819. https://doi.org/10.3390/en15051819