
Piloted Simulation of the Rotorcraft Wind Turbine Wake Interaction during Hover and Transit Flights

 , ,
, ,
Abstract
:1. Introduction
2. Regulations for Helicopter Operations
3. Operational Scenarios
4. Computational Fluid Dynamics
4.1. Rotating WT
4.1.1. CFD Setup
4.1.2. CFD Analysis
4.2. Non-Rotating WT
4.2.1. CFD Setup
4.2.2. CFD Analysis
5. Piloted Simulation
5.1. Research Flight Simulator AVES
5.2. Helicopter Modeling
5.3. Pilot Task
5.3.1. Transit Task
5.3.2. Hover Task

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Desired | Adequate |
|---|---|---|
| Heading, | ||
| Lateral limit, m | ||
| Longitudinal limit, m | ||
| Hover time, s | <30 | <30 |
5.4. Objective and Subjective Assessments
6. Results
6.1. Offline Analysis of OS-1
6.2. Piloted Simulation
6.2.1. Results of OS-1
6.2.2. Results of OS-2
7. Discussion
7.1. Discussion of OS-1
7.2. Discussion of OS-2
8. Conclusions
- Transit flight
- -
- The helicopter’s reactions with CFD flow fields can be larger than in the SWM due to blade tip vortex helix deformation, vortex merging and additional turbulence. Those aerodynamic effects can increase the impacts of vortex encounters at medium to far distances from the WT.
- -
- Non-piloted simulations of longitudinal vortex rotor interaction between a helicopter with BA response type and a WT blade tip vortex helix may cause vortex encounters higher than level 3 by ADS-33 offline criteria.
- -
- In contrast, piloted simulations with an artificial pilot response time of showed that those helicopter reactions can be recovered with little danger.
- -
- Overall, the simulations suggest that the sizes of current flight corridors in offshore wind farms are sufficiently large for the considered scenario. Transit flights at different altitudes, in close proximity to WTs and at various wind speeds, have always been recovered without much risk.
- Hover flight
- -
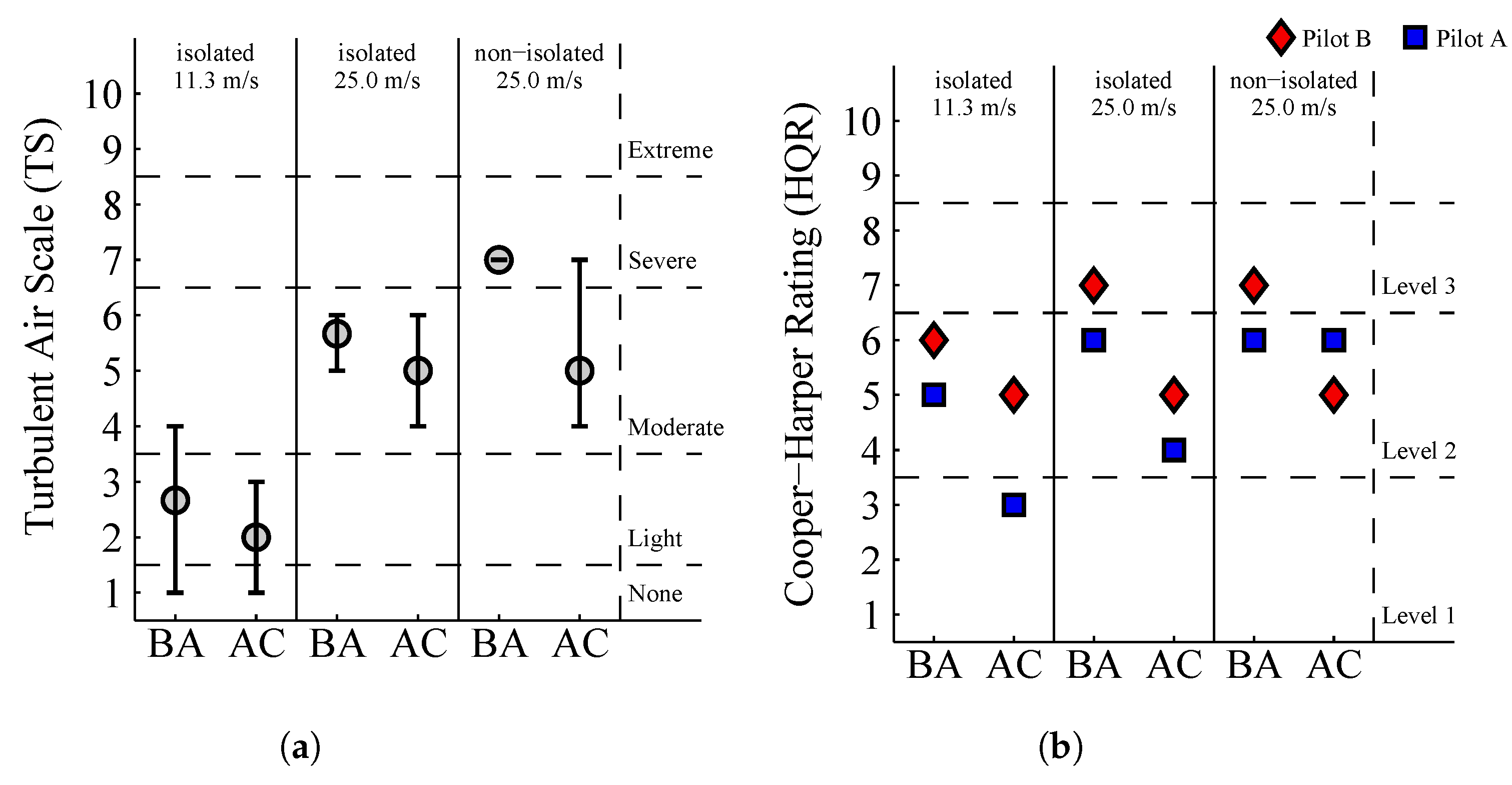
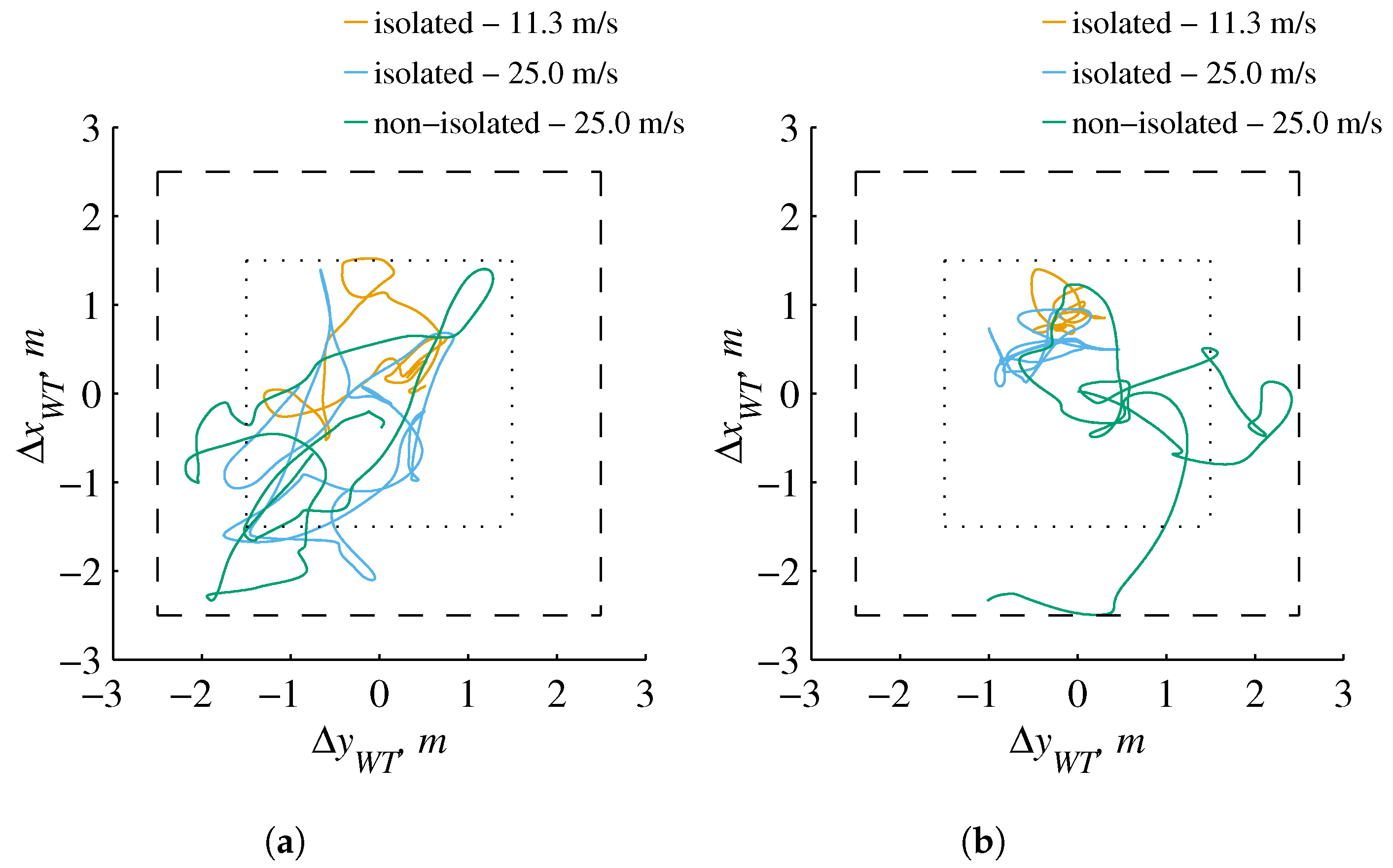
- The perceived turbulence and the pilot compensation increased with increasing wind speed . Additional turbulence at a non-isolated WT was perceived, but for this specific case it did not necessarily cause additional pilot compensation.
- -
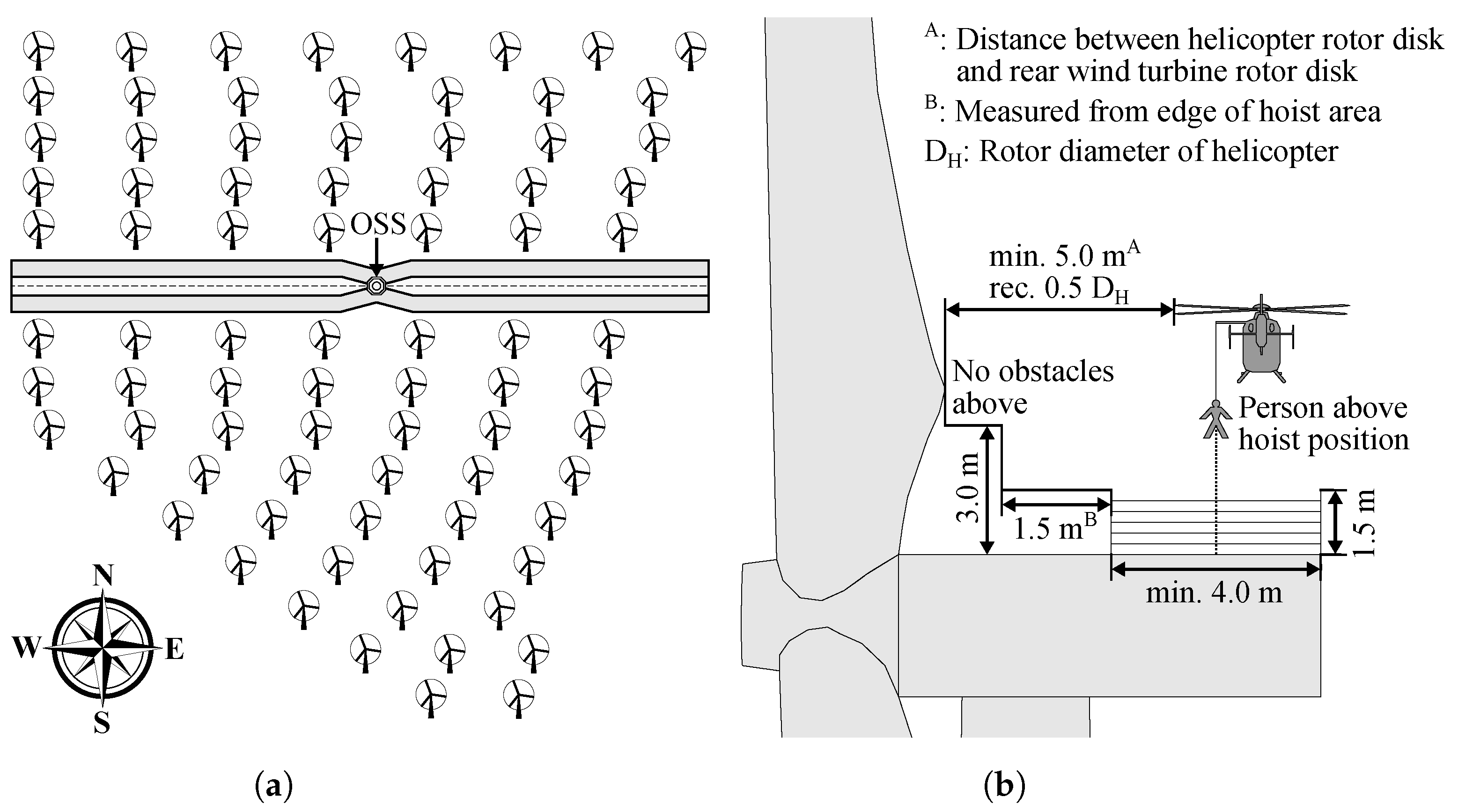
- The largest lateral deviations of were estimated with a helicopter with BA response type and at an unusually high wind speed of . Consequently, the lateral safety clearance towards the WT was made .
- -
- Overall, the simulations suggest that the lateral safety clearance is sufficiently large for the considered scenario. Probably, hoist crew comfort and safety are more limiting than the lateral safety clearance.
Author Contributions
Funding

Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| m | Rotor diameter of helicopter rotor | |
| m | Rotor diameter of WT | |
| 1/min | Rotational frequency of helicopter rotor | |
| 1/min | Rotational frequency of WT | |
| m | Altitude change | |
| I | % | Turbulence intensity |
| % | Turbulence intensity, vertical direction | |
| L | m | Integral length scale |
| m | Distance between WTs in OS-2 | |
| kg | Mass of helicopter | |
| - | Number of blades of helicopter rotor | |
| , , | - | Load factors |
| m | Blade tip vortex core radius | |
| m | Rotor radius of helicopter rotor | |
| s | Time of vortex encounter | |
| s | Time of the end of offline evaluation | |
| s | Time of the start of recovery maneuver | |
| s | Temporal discretization of airwake data | |
| s | Temporal dimension of airwake data | |
| u, v, w | m/s | CFD flow fields velocities |
| m/s | Blade tip speed of helicopter rotor | |
| m/s | Blade tip vortex tangential speed | |
| m/s | Wind speed | |
| m/s | Rated wind speed of WT | |
| m/s | Cut-off wind speed of WT | |
| , , | m/s | Airwake velocities |
| kt | Airspeed of helicopter | |
| , , | m | CFD coordinate system |
| , , | m | WT coordinate system |
| , , | m | Position of Vortex encounter |
| , , | m | Helicopter position deviations |
| m | Local spatial discretization of CFD data | |
| , , | m | Spatial discretization of airwake data |
| , , | m | Spatial dimension of airwake data |
| - | Dimensionless wall distance | |
| m | WT hub height | |
| m²/s | Wind profile power law with the exponent | |
| m²/s | Blade tip vortex circulation | |
| m²/s | Initial blade tip vortex circulation | |
| , , , | % | lateral, longitudinal, pedal and collective pilot input |
| - | Regularization kernel | |
| - | Helicopter advance ratio | |
| m/s | Standard deviation, vertical direction | |
| , , | Roll, pitch and yaw attitude | |
| , | 1/s | Vorticity |
| rad/s | Rotor rotational speed of helicopter rotor |
Appendix A
| Pilot A | Pilot B | Pilot C | Pilot D | |
|---|---|---|---|---|
| Pilot license | 27 years | 41 years | 20 years | 6 years |
| Experimental test pilot | Yes | Yes | No | No |
| Aircraft experience: EC135 | 400 h | 1250 h | 2045 h | 600 h |
| Aircraft experience: Bo105 | 200 h | 3050 h | - | - |
| Aircraft experience: Sea King | 2500 h | - | - | - |
| Aircraft experience: Chinook | 500 h | - | - | - |
| Aircraft experience: Bell 205 | - | 500 | - | - |
| Aircraft experience: Bell 412 | - | 500 | - | - |
| Aircraft experience: Bell UH-1 | - | - | 1105 h | - |
| Aircraft experience: Alouette II | - | 1400 | 138 h | - |
| Aircraft experience: Agusta A109 | - | - | 54 h | - |
| Aircraft experience: Sikorsky S-76 | - | - | 620 h | - |
| Aircraft experience: Others | 1000 h | - | - | 150 h |
| Total flight hours | 4600 h | 6700 h | 3962 h | 750 h |
| Offshore flights per year | 100 | 1 | 208 | 30 |
| Helicopter offshore experience (% of flight hours) | 50–75% | 0–25% | 75–100% | 25–50% |
| Maneuver: Landing OSS | more than 30 | 0 | more than 30 | 0 |
| Maneuver: Hoisting with person at OSS | more than 30 | 0 | more than 30 | 0 |
| Maneuver: Hoisting without person at OSS | more than 30 | 0 | 0 | 0 |
| Maneuver: Hoisting with person at ship | 0 | 0 | more than 30 | 0 |
| Maneuver: Ship deck landing | 10–30 | 0 | more than 30 | 0–10 |
| Scale | Definition | Air Condition |
|---|---|---|
| 1 | - | Flat calm |
| 2 | Light | Fairly smooth, occasional gentle displacement |
| 3 | Small movements requiring correction if in manual control | |
| 4 | Moderate | Continuous small bumps |
| 5 | Continuous medium bumps | |
| 6 | Medium bumps with occasional heavy ones | |
| 7 | Severe | Continuous heavy bumps |
| 8 | Occasional negative “g” | |
| 9 | Extreme | Rotorcraft difficult to control |
| 10 | Rotorcraft lifted bodily several hundreds of feet |
| Sea State Code | Description of Sea | Significant Wave Height | Wind Speed | |
|---|---|---|---|---|
| m | ft | kt | ||
| 0 | Calm (Glassy) | 0 | 0 | 0–3 |
| 1 | Calm (Rippled) | 0 to 0.1 | 0 to | 4–6 |
| 2 | Smooth (Wavelets) | 0.1 to 0.5 | to | 7–10 |
| 3 | Slight | 0.5 to 1.25 | to 4 | 11–16 |
| 4 | Moderate | 1.25 to 2.5 | 4 to 8 | 17–21 |
| 5 | Rough | 2.5 to 4 | 8 to 13 | 22–27 |
| 6 | Very Rough | 4 to 6 | 13 to 20 | 28–47 |
| 7 | High | 6 to 8 | 20 to 30 | 48–55 |
| 8 | Very High | 9 to 14 | 30 to 45 | 56–63 |
| 9 | Phenomenal | Over 14 | Over 45 | 64–118 |
References
- Mauz, M.; Rautenberg, A.; Platis, A.; Cormier, M.; Bange, J. First identification and quantification of detached-tip vortices behind a wind energy converter using fixed-wing unmanned aircraft system. Wind Energy Sci. 2019, 4, 451–463. [Google Scholar] [CrossRef] [Green Version]
- Bühler, M.; Weihing, P.; Klein, L.; Lutz, T.; Krämer, E. Actuator line method simulations for the analysis of wind turbine wakes acting on helicopters. J. Phys. Conf. Ser. 2018, 1037, 062004. [Google Scholar] [CrossRef] [Green Version]
- Cormier, M.; Bühler, M.; Mauz, M.; Lutz, T.; Bange, J.; Krämer, E. CFD Prediction of Tip Vortex Aging in the Wake of a Multi-MW Wind Turbine. J. Phys. Conf. Ser. 2020, 1618, 062029. [Google Scholar] [CrossRef]
- Cormier, M.; Lutz, T. Numerical Investigation of the Unsteady Flow Field Past an Offshore Wind Turbine in Maintenance Operations. In STAB/DGLR Symposium; Springer: Cham, Switzerland, 2020; pp. 592–603. [Google Scholar]
- Cormier, M.; Letzgus, P.; Lutz, T.; Krämer, E. CFD Study of an Offshore Wind Turbine in Maintenance Conditions. In High Performance Computing in Science and Engineering’20; Springer: Cham, Switzerland, 2021; pp. 435–449. [Google Scholar]
- Horvat, B.; Hajek, M.; Rauleder, J. Analysing rotorcraft vortex encounter methods with a lattice-boltzmann method based gpu framework. In Proceedings of the AIAA Science and Technology Forum and Exposition (SciTech), Orlando, FL, USA, 6–10 January 2020. [Google Scholar]
- Horvat, B.; Hajek, M.; Rauleder, J. Computational flight path analysis of a helicopter in an offshore wind farm using a lattice-boltzmann method. In Proceedings of the AIAA Science and Technology Forum and Exposition (SciTech), Virtual Conference, 19–21 January 2021. [Google Scholar]
- Štrbac, A.; Martini, T.; Greiwe, D.H.; Hoffmann, F.; Jones, M. Analysis of Rotorcraft Wind Turbine Wake Encounters using Piloted Simulation. CEAS Aeronaut. J. 2021, 12, 273–290. [Google Scholar] [CrossRef]
- Ramirez, L.; Fraile, D.; Brindley, G. Offshore Wind in Europe—Key Trends and Statistics 2020; Technical Report; WindEurope: Brussels, Belgium, 2021. [Google Scholar]
- Komusanac, I.; Brindley, G.; Fraile, D.; Ramirez, L. Wind Energy in Europe—2020 Statistics and the Outlook for 2021–2025; Technical Report; WindEurope: Brussels, Belgium, 2021. [Google Scholar]
- Dalgic, Y.; Lazakis, I.; Turan, O. Investigation of Optimum Crew Transfer Vessel Fleet for Offshore Wind Farm Maintenance Operations. Wind Eng. 2015, 39, 31–52. [Google Scholar] [CrossRef] [Green Version]
- Muller, M.; Greenwood, R.; Richards, M.; Bark, L. Survey and Analysis of Rotorcraft Flotation Systems; Technical Report DOT/FAA/AR-95/53; U.S. Department of Transportation (DOT), Federal Aviation Administration (FAA): Washington, DC, USA, 1996. [Google Scholar]
- Padfield, G.D.; Manimala, B.; Turner, G.P. A Severity Analysis for Rotorcraft Encounters with Vortex Wakes. J. Am. Helicopter Soc. 2004, 49, 445–456. [Google Scholar] [CrossRef]
- van der Wall, B.G.; Fischenberg, D.; Lehmann, P.H.; van der Wall, L.B. Impact of Wind Energy Rotor Wakes on Fixed-Wing Aircraft and Helicopters. In Proceedings of the 42nd European Rotorcraft Forum, Lille, France, 5–8 September 2016. [Google Scholar]
- van der Wall, B.G.; Lehmann, P.H. About the Impact of Wind Turbine Blade Tip Vortices on Helicopter Rotor. CEAS Aeronaut. J. 2018, 9, 67–84. [Google Scholar] [CrossRef]
- van der Wall, B.G. Rotor Thrust and Power Variations during In-Plane and Orthogonal Vortex Interaction. In Proceedings of the 7th Asian/Australian Rotorcraft Forum, Jeju Island, Korea, 30 October–1 November 2018. [Google Scholar]
- van der Wall, B.G. Impact of Vortex—Wake Interference on Rotor Trim; In Proceedings of the VFS Transformative Vertical Flight, San Jose, CA, USA, 21–23 January 2020.
- van der Wall, B.G. Comparison of Different Approaches for Modeling Vortex—Rotor Wake Interference on Rotor Trim. In Proceedings of the 76th Annual Forum and Technology Display, addedOnline, 6–8 October 2020. [Google Scholar]
- Bakker, R.; Visingardi, A.; van der Wall, B.G.; Voutsinas, S.; Basset, P.M.; Campagnolo, F.; Pavel, M.; Barakos, G.; White, M. Wind Turbine Wakes and Helicopter Operations—An Overview of the Garteur HC-AG23 Activities. In Proceedings of the 44th European Rotorcraft Forum, Delft, The Netherlands, 18–21 September 2018. [Google Scholar]
- Hoffmann, F. Rechtliche und flugbetriebliche Grundlagen für Hubschraubereinsätze in Offshore-Windparks; Technical Report DLR-IB-FT-BS-2017-134; Deutsches Zentrum für Luft-und Raumfahrt (DLR): Braunschweig, Germany, 2018. [Google Scholar]
- Anon. Bekanntmachung der Gemeinsamen Grundsätze des Bundes und der Länder über Windenbetriebsflächen auf Windenergieanlagen: GGBL-WBF, Bundesministerium für Verkehr, Bau und Stadtentwicklung (BMVBS). Available online: http://www.verwaltungsvorschriften-im-internet.de/bsvwvbund_18012012_LR116116524.htm (accessed on 27 November 2021).
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5 MW Reference Wind Turbine for Offshore System Development; Technical Report NREL/TP-500-38060; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2009. [Google Scholar]
- Anon. North West Shelf Data Portal, Bundesamt für Seeschifffahrt und Hydrographie (BSH). Available online: http://nwsportal.bsh.de/ (accessed on 27 November 2018).
- Kroll, N.; Faßbender, J. MEGAFLOW—Numerical Flow Simulation for Aircraft Design. In MEGAFLOW Symposium; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Jameson, A.; Schmidt, W.; Turkel, E. Numerical solution of the Euler equations by finite volume methods using Runge Kutta time stepping schemes. In Proceedings of the 14th Fluid and Plasma Dynamics Conference, Palo Alto, CA, USA, 23–25 June 1981. [Google Scholar]
- Kowarsch, U.; Keßler, M.; Krämer, E. High Order CFD-Simulation of the Rotor-Fuselage Interaction. Available online: https://dspace-erf.nlr.nl/xmlui/bitstream/handle/20.500.11881/605/erf2013_091.pdf?sequence=1 (accessed on 27 November 2021).
- Klein, L.; Gude, J.; Wenz, F.; Lutz, T.; Krämer, E. Advanced computational fluid dynamics (CFD)–multi-body simulation (MBS) coupling to assess low-frequency emissions from wind turbines. Wind Energy Sci. 2018, 3, 713–728. [Google Scholar] [CrossRef] [Green Version]
- Weihing, P.; Schulz, C.; Lutz, T.; Krämer, E. Comparison of the actuator line model with fully resolved simulations in complex environmental conditions. J. Phys. Conf. Ser. 2017, 854, 012049. [Google Scholar] [CrossRef]
- Troldborg, N.; Zahle, F.; Réthoré, P.E.; Sørensen, N. Comparison of wind turbine wake properties in non-sheared inflow predicted by different CFD rotor models. Wind Energy 2014, 18, 1239–1250. [Google Scholar] [CrossRef]
- Shives, M.; Crawford, C. Mesh and load distribution requirements for actuator line CFD simulations. Wind Energy 2013, 16, 1183–1196. [Google Scholar] [CrossRef]
- Troldborg, N. Actuator Line Modeling of Wind Turbine Wakes. Ph.D. Thesis, Technical University of Denmark, Lyngby, Denmark, June 2008. [Google Scholar]
- Türk, M. Ermittlung Designrelevanter Belastungsparameter für Offshore-Windkraftanlagen. Ph.D. Thesis, Universität zu Köln, Köln, Germany, 2008. [Google Scholar]
- Mann, J. The spatial structure of neutral atmospheric surface-layer turbulence. J. Fluid Mech. 1994, 273, 141–168. [Google Scholar] [CrossRef]
- Peña, A.; Gryning, S.E.; Mann, J. On the length-scale of the wind profile. Q. J. R. Meteorol. Soc. 2010, 136, 2119–2131. [Google Scholar] [CrossRef]
- Sherry, M.; Nemes, A.; Lo Jacono, D.; Blackburn, H.M.; Sheridan, J. The interaction of helical tip and root vortices in a wind turbine wake. Phys. Fluids 2013, 25, 117102. [Google Scholar] [CrossRef] [Green Version]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef] [Green Version]
- Rowe, S.J.; Howson, D.; Turner, G. A turbulence criterion for safe helicopter operations to offshore installations. Aeronaut. J. 2006, 110, 749–758. [Google Scholar] [CrossRef] [Green Version]
- Duda, H.; Gerlach, T.; Advani, S.; Potter, M. Design of the DLR AVES Research Flight Simulator. In Proceedings of the AIAA Modeling and Simulation Technologies (MST) Conference, Boston, MA, USA, 21–23 May 2013. [Google Scholar]
- Kaletka, J.; Kurscheid, H.; Butter, U. FHS, the New Research Helicopter: Ready for Service. In Proceedings of the 29th European Rotorcraft Forum, Friedrichshafen, Germany, 16–18 September 2003. [Google Scholar]
- Maibach, M.J.; Jones, M.; Štrbac, A. Development of a Simulation Environment for Maritime Rotorcraft Research Applications. In Proceedings of the Deutscher Luft- und Raumfahrtkongress (DLRK), Online conference, 3 September 2020. [Google Scholar]
- Lehmann, P.H.; Jones, M.; Höfinger, M. Impact of Turbulence and Degraded Visual Environment on Pilot Workload. CEAS Aeronaut. J. 2017, 8, 413–428. [Google Scholar] [CrossRef]
- Hamers, M.; von Grünhagen, W. Nonlinear Helicopter Model Validation Applied to Realtime Simulations. In Proceedings of the 53rd American Helicopter Society Annual Forum, Virginia Beach, VA, USA, 29 April–1 May 1997. [Google Scholar]
- Pitt, D.M.; Peters, D.A. Theoretical Prediction of Dynamic-Inflow Derivatives. Vertica 1981, 5, 21–34. [Google Scholar]
- Anon. Aeronautical Design Standard 33E PRF; Technical Report ADS-33E-PRF; United States Army Aviation and Missile Command (AMCOM): Redstone, AL, USA, 2000. [Google Scholar]
- Anon. Defence Standard 00-970, Design and Airworthiness Requirements for Service Aircraft, Part 7—Rotorcraft; Technical Report DEF STAN 00-970 Part 7/2—Section 9; Ministry of Defence: Glasgow, UK, 2007. [Google Scholar]
- Cooper, G.E.; Harper, R.P. The Use of Pilot Rating in the Evaluation of Aircraft Handling Qualities; Technical Report TND 5153; National Aeronautics and Space Administration (NASA): Washington, DC, USA, 1969. [Google Scholar]
- Anon. Advisory Circular AC 29-2C—Certification of Transport Category Rotorcraft; Technical Report AC 29-2C; U.S. Department of Transportation (DOT), Federal Aviation Administration (FAA): Washington, DC, USA, 2014. [Google Scholar]





| Airwake Data | C1 | C2 | C4 | C5 | C6 | C7 |
|---|---|---|---|---|---|---|
| Operational scenario | OS-1 | OS-1 | OS-2 | OS-2 | OS-2 | OS-2 |
| WT status | rotating | rotating | non-rotating | non-rotating | non-rotating | non-rotating |
| WT surrounding | isolated | isolated | isolated | isolated | non-isolated | non-isolated |
| , m/s | 11.3 | 25.0 | 11.3 | 25.0 | 11.3 | 25.0 |
| , , , m | 0.125 | 0.125 | 0.225 | 0.225 | 0.225 | 0.225 |
| , m | 440 | 440 | 85 | 85 | 85 | 85 |
| , m | 232 | 232 | 170 | 170 | 170 | 170 |
| , m | 206 | 206 | 50 | 50 | 50 | 50 |
| , s | - | - | 0.04 | 0.04 | 0.04 | 0.04 |
| , s | - | - | 12.40 | 12.40 | 12.40 | 12.40 |
| Airwake Data | Mean Velocity Profile | Mann-Box Parameters | ||
|---|---|---|---|---|
| , m/s | I, % | L, m | ||
| C1, C4 | 11.3 | 0.14 | 5.00 | 45 |
| C2, C5, C7 | 25.0 | 0.14 | 6.84 | 60 |
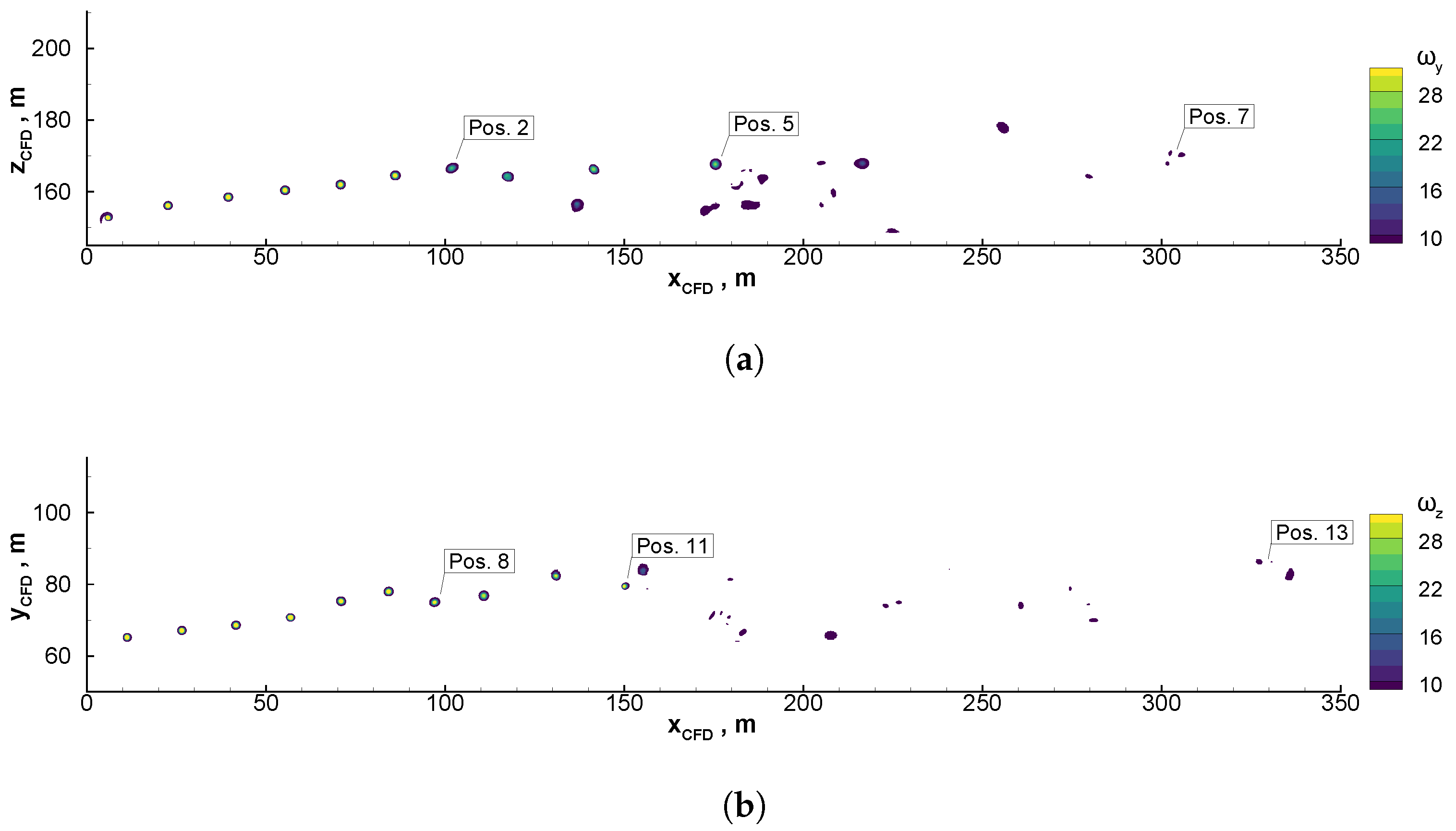
| Parameter | Pos. 7 | Pos. 5 | Pos. 2 | Pos. 13 | Pos. 11 | Pos. 8 |
|---|---|---|---|---|---|---|
| Upper Boundary | Hub Height | |||||
| , m | 300 | 175 | 100 | 330 | 150 | 100 |
| , m | 2.96 | 1.30 | 1.26 | - | 0.80 | 1.00 |
| , m/s | 3.20 | 10.49 | 9.35 | - | 8.50 | 10.57 |
| , m²/s | 79 | 133 | 116 | - | 110 | 98 |
| Case | Wind Speed | WT Surrounding | Vertical Standard Deviation | ||
|---|---|---|---|---|---|
| , m/s | , m/s | , m/s | , m/s | ||
| C4 | 11.3 | isolated | 0.42 | 0.46 | 0.49 |
| C5 | 25.0 | isolated | 0.93 | 0.99 | 1.03 |
| C7 | 25.0 | non-isolated | 0.99 | 1.02 | 1.05 |
| Parameter | ACT/FHS |
|---|---|
| , m | 5.1 |
| , 1/min | 395 |
| , rad/s | 41.4 |
| , m/s | 211 |
| 4 | |
| , kg | 2630 |
| Parameter | Desired | Adequate |
|---|---|---|
| Heading, | ||
| Airspeed, kt | ||
| Altitude, ft | ||
| Stabilize time, s | <5 | <8 |
| Response time, s | 3 | 3 |
| Level | Flight Condition | ||
|---|---|---|---|
| Hover and Low Speed | Forward Flight | ||
| Near Earth | Up-and-Away | ||
| 1 | roll, pitch, yaw 0.05 g nx, ny, nz no recovery action for | both hover and low speed and forward flight up-and-away requirements apply | stay within OFE no recovery action for |
| 2 | roll, pitch, yaw 0.20 g nx, ny, nz no recovery action for | both hover and low speed and forward flight up-and-away requirements apply | stay within OFE no recovery action for |
| 3 | roll, pitch, yaw 0.40 g nx, ny, nz no recovery action for | both hover and low speed and forward flight up-and-away requirements apply | stay within OFE no recovery action for |
| Flight Direction | Airwake Data | Pos. 2 | Pos. 5 | Pos. 7 |
|---|---|---|---|---|
| West | C1 | 2–3 | >3 | >3 + |
| SWM | 2–3 | 2–3 | 2–3 | |
| East | C1 | 2–3 + | >3 | 3 + |
| SWM | 2–3 | 2–3 | 2–3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Štrbac, A.; Greiwe, D.H.; Hoffmann, F.; Cormier, M.; Lutz, T. Piloted Simulation of the Rotorcraft Wind Turbine Wake Interaction during Hover and Transit Flights. Energies 2022, 15, 1790. https://doi.org/10.3390/en15051790
Štrbac A, Greiwe DH, Hoffmann F, Cormier M, Lutz T. Piloted Simulation of the Rotorcraft Wind Turbine Wake Interaction during Hover and Transit Flights. Energies. 2022; 15(5):1790. https://doi.org/10.3390/en15051790
Chicago/Turabian StyleŠtrbac, Alexander, Daniel Heinrich Greiwe, Frauke Hoffmann, Marion Cormier, and Thorsten Lutz. 2022. "Piloted Simulation of the Rotorcraft Wind Turbine Wake Interaction during Hover and Transit Flights" Energies 15, no. 5: 1790. https://doi.org/10.3390/en15051790
APA StyleŠtrbac, A., Greiwe, D. H., Hoffmann, F., Cormier, M., & Lutz, T. (2022). Piloted Simulation of the Rotorcraft Wind Turbine Wake Interaction during Hover and Transit Flights. Energies, 15(5), 1790. https://doi.org/10.3390/en15051790