
Developing and Field Testing a Green Light Optimal Speed Advisory System for Buses



Abstract
:1. Introduction
2. Methodology
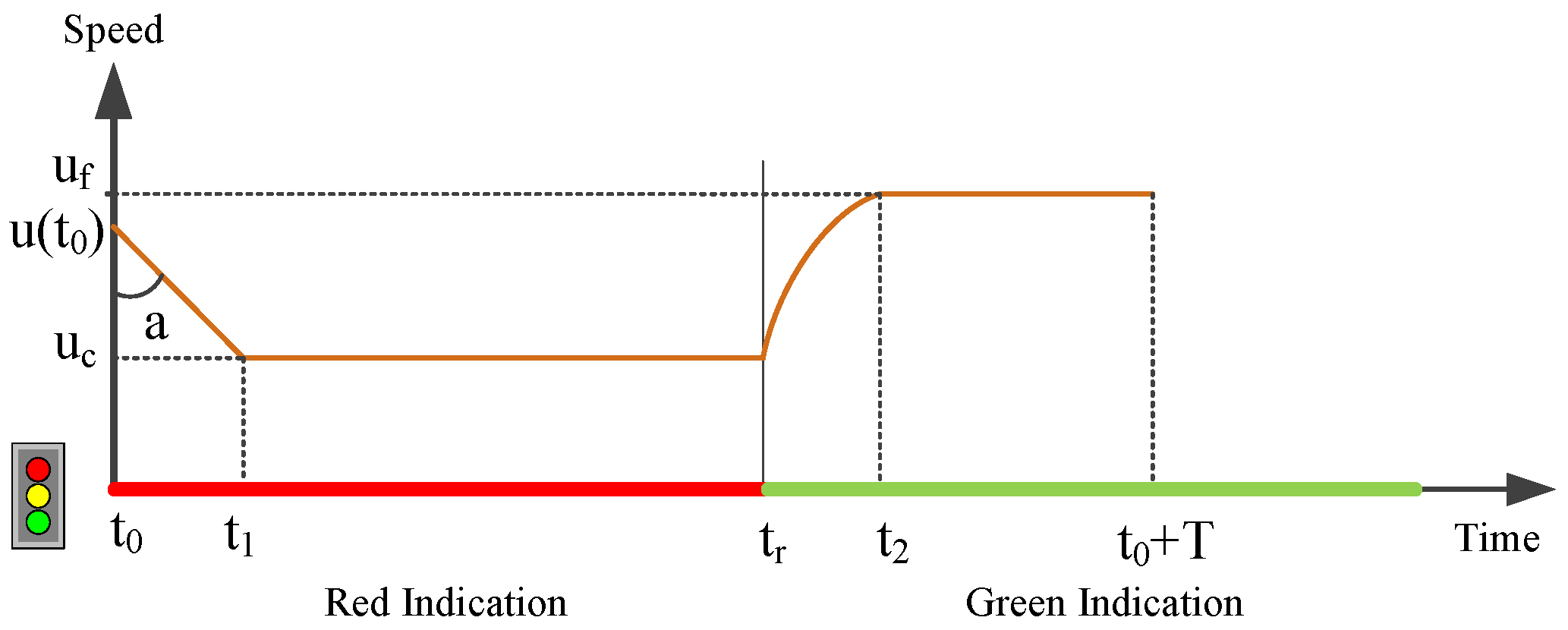
2.1. B-GLOSA System
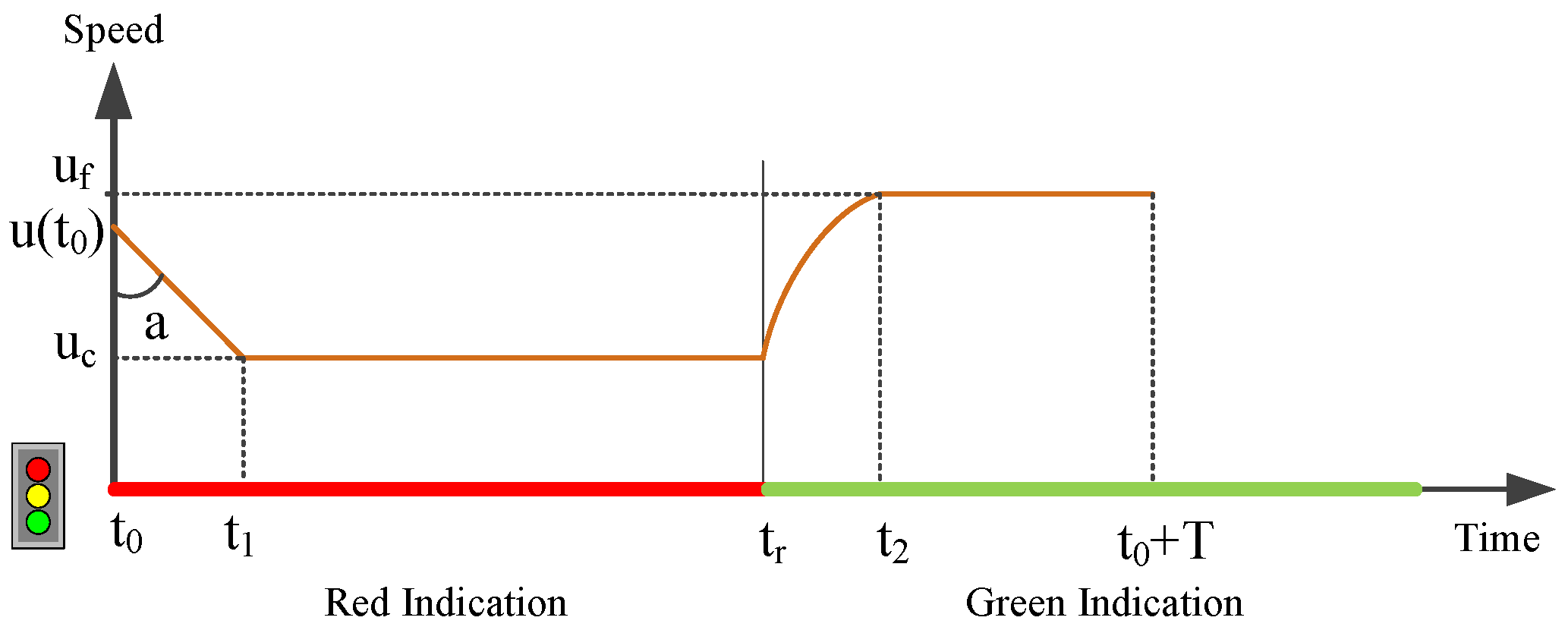
2.2. GLOSA for Buses
3. Case Study
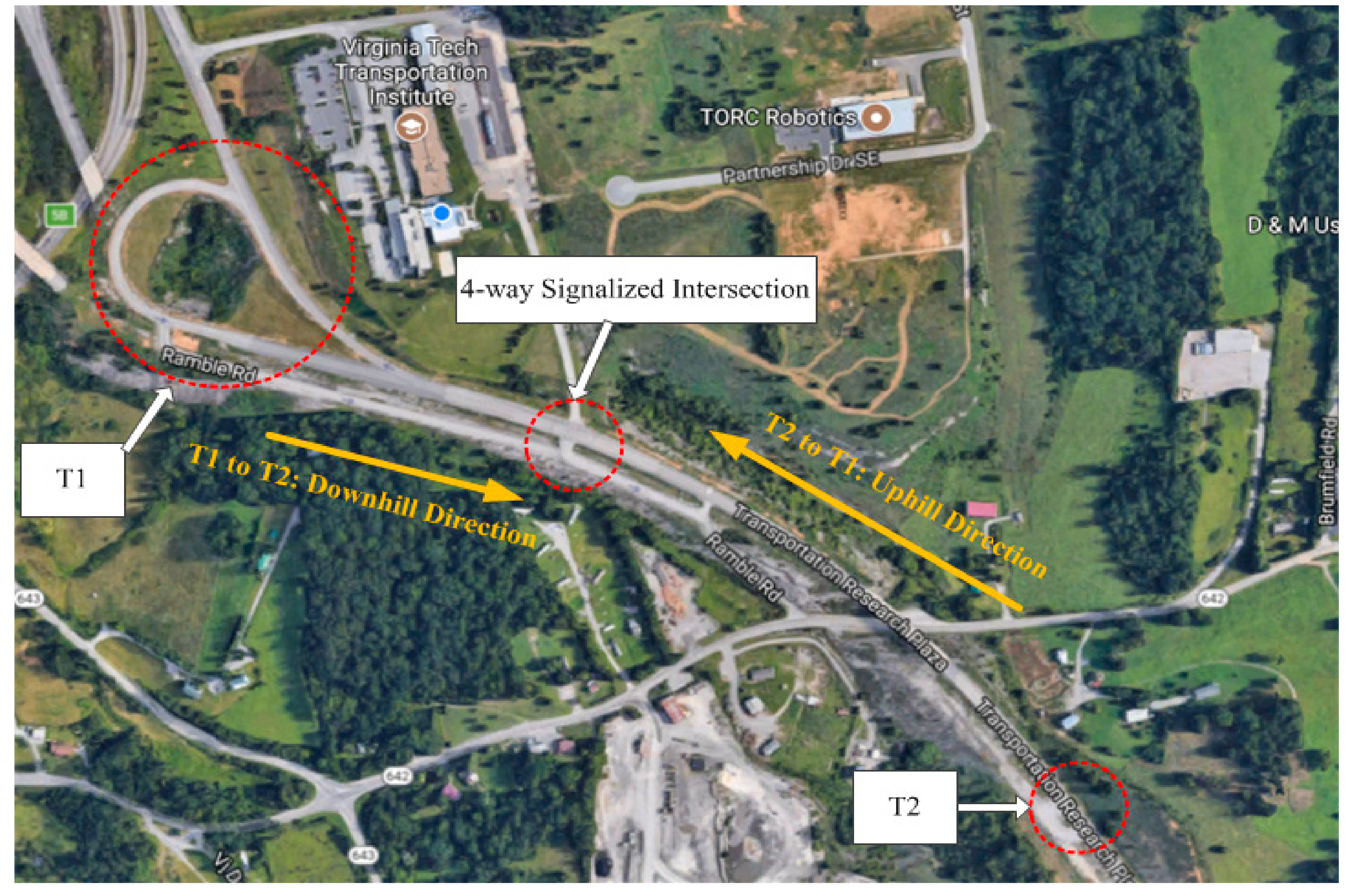
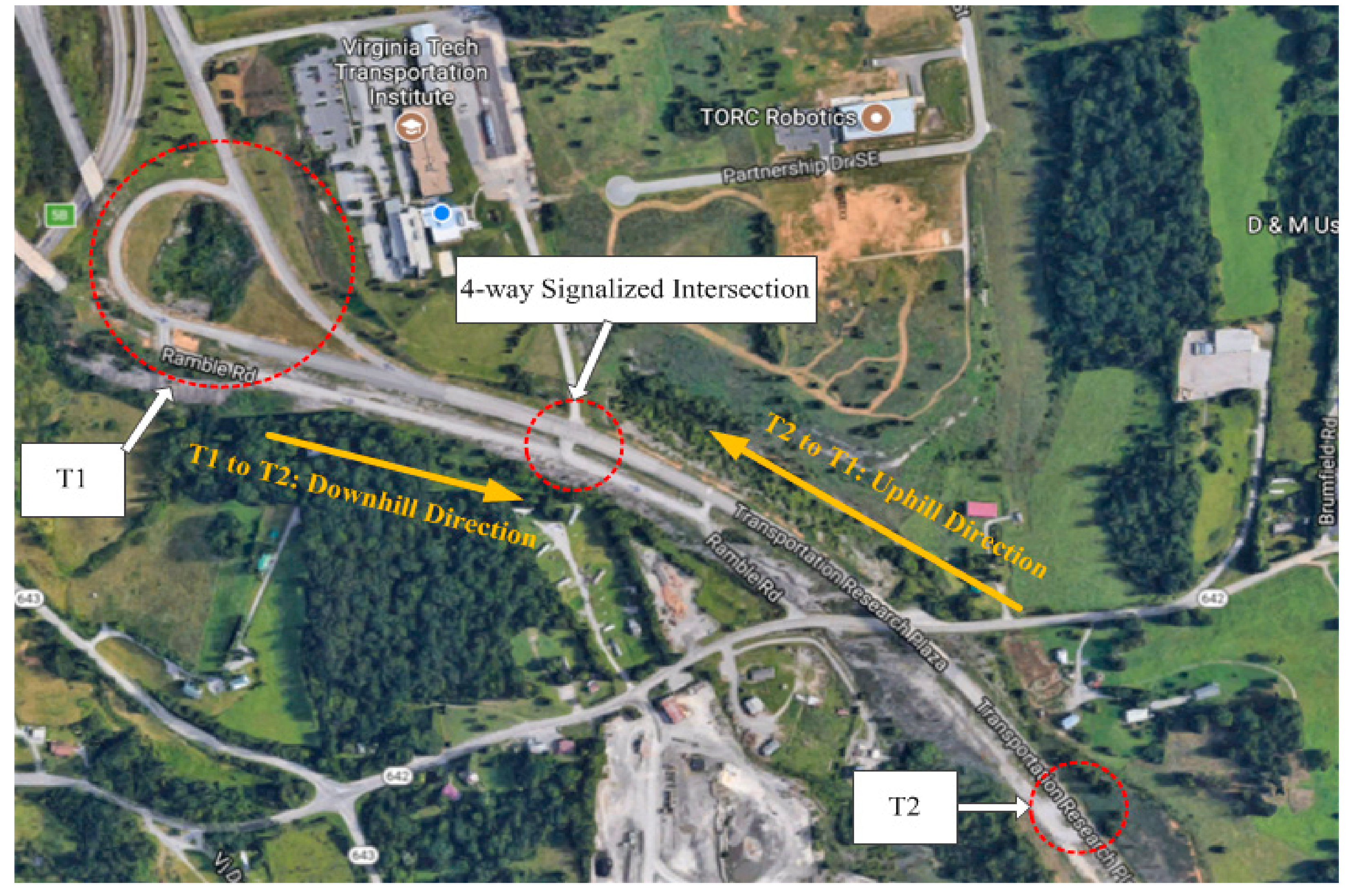
3.1. Test Environment
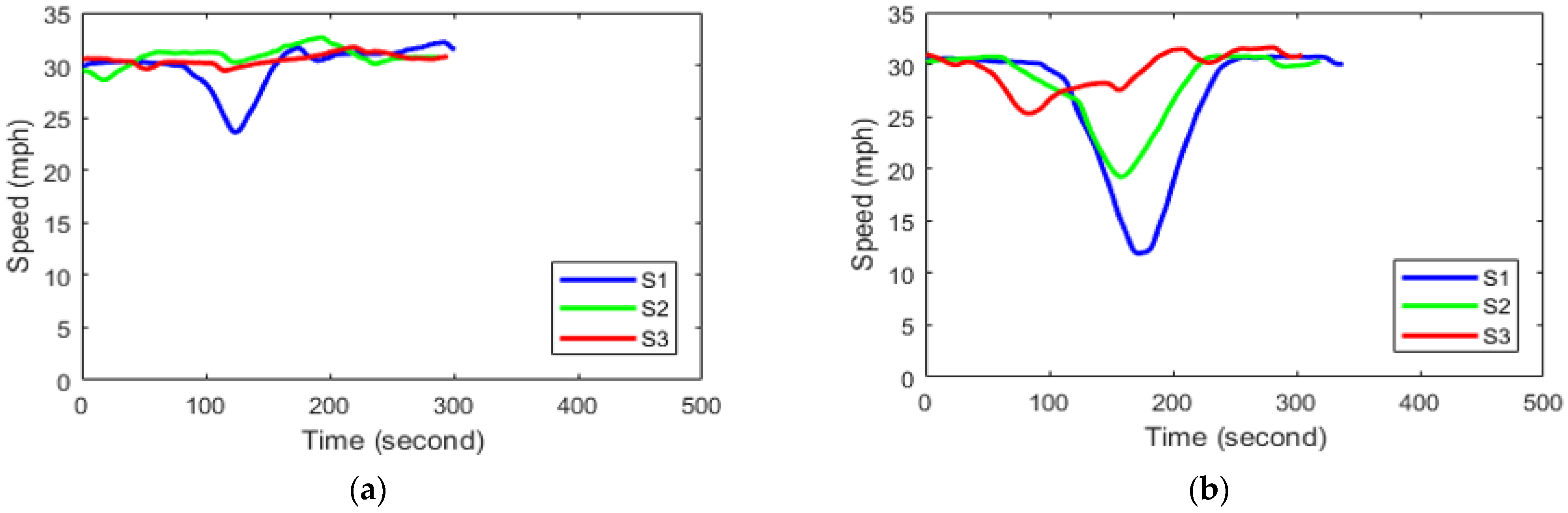
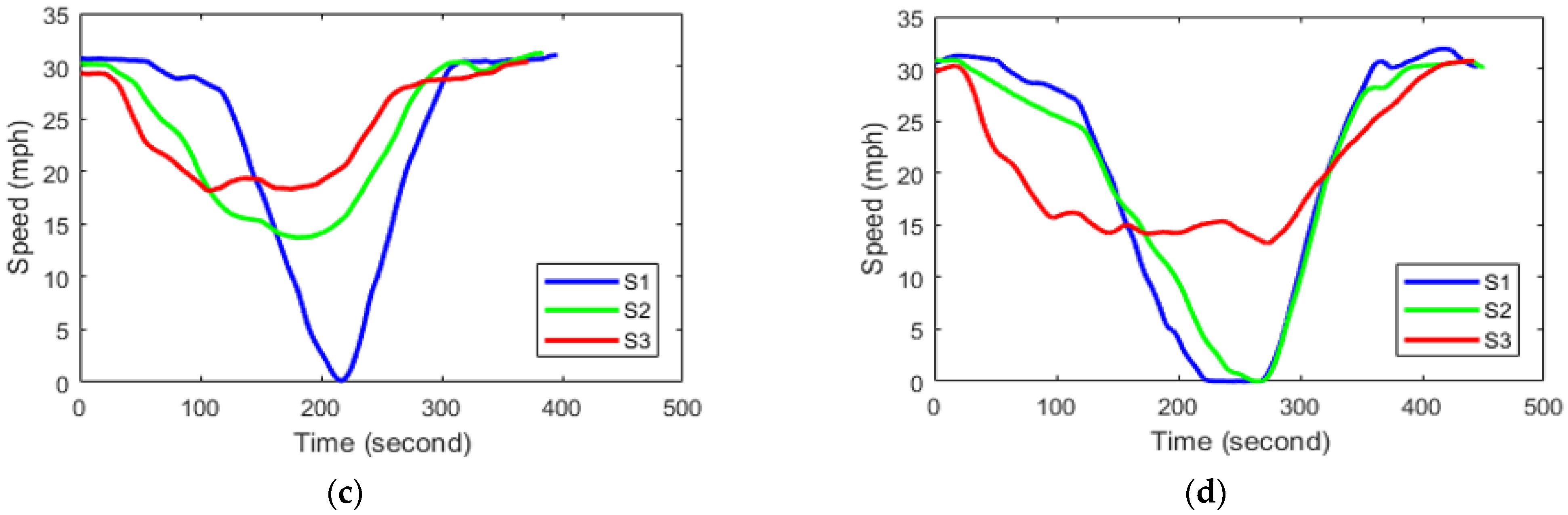
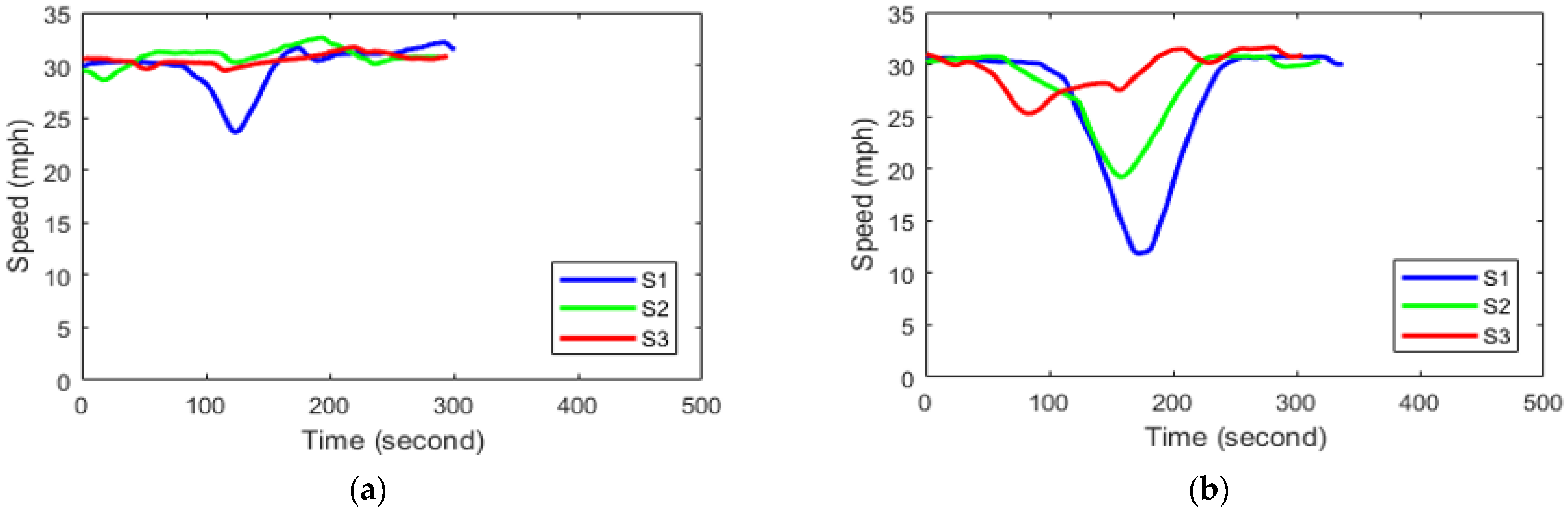
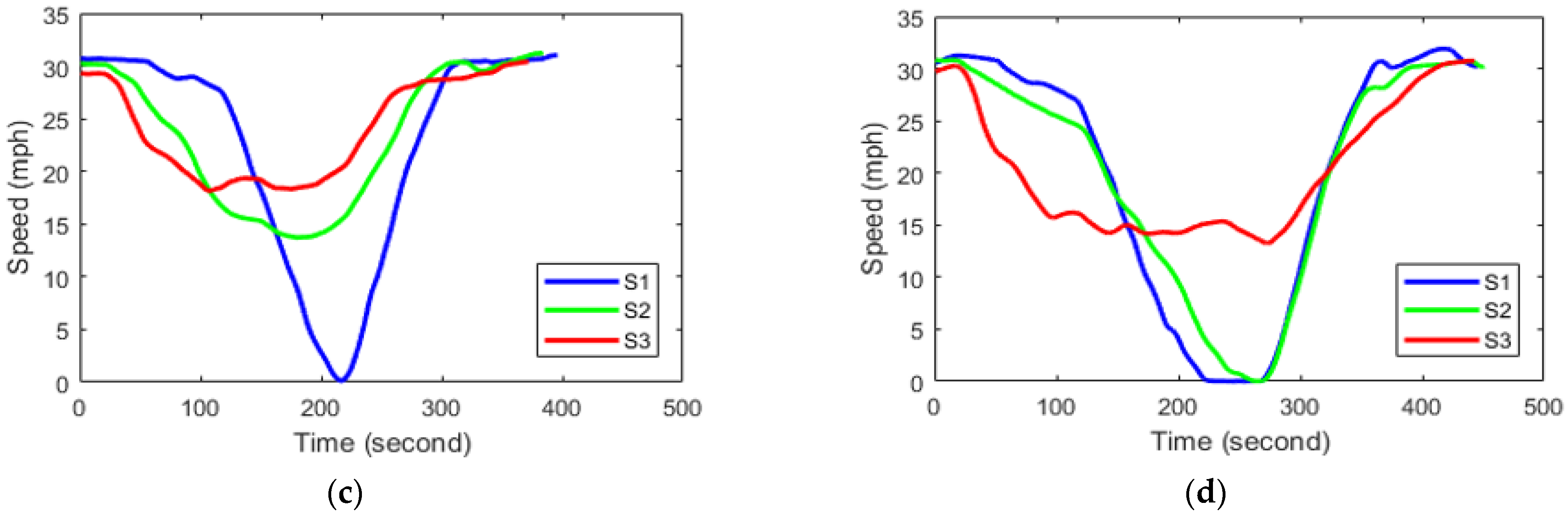
- Scenario 1 (S1)—Uninformed drive:
- Scenario 2 (S2)—Informed drive with the provision of signal timing information:
- Scenario 3 (S3)—Informed drive with recommended speed (B-GLOSA):
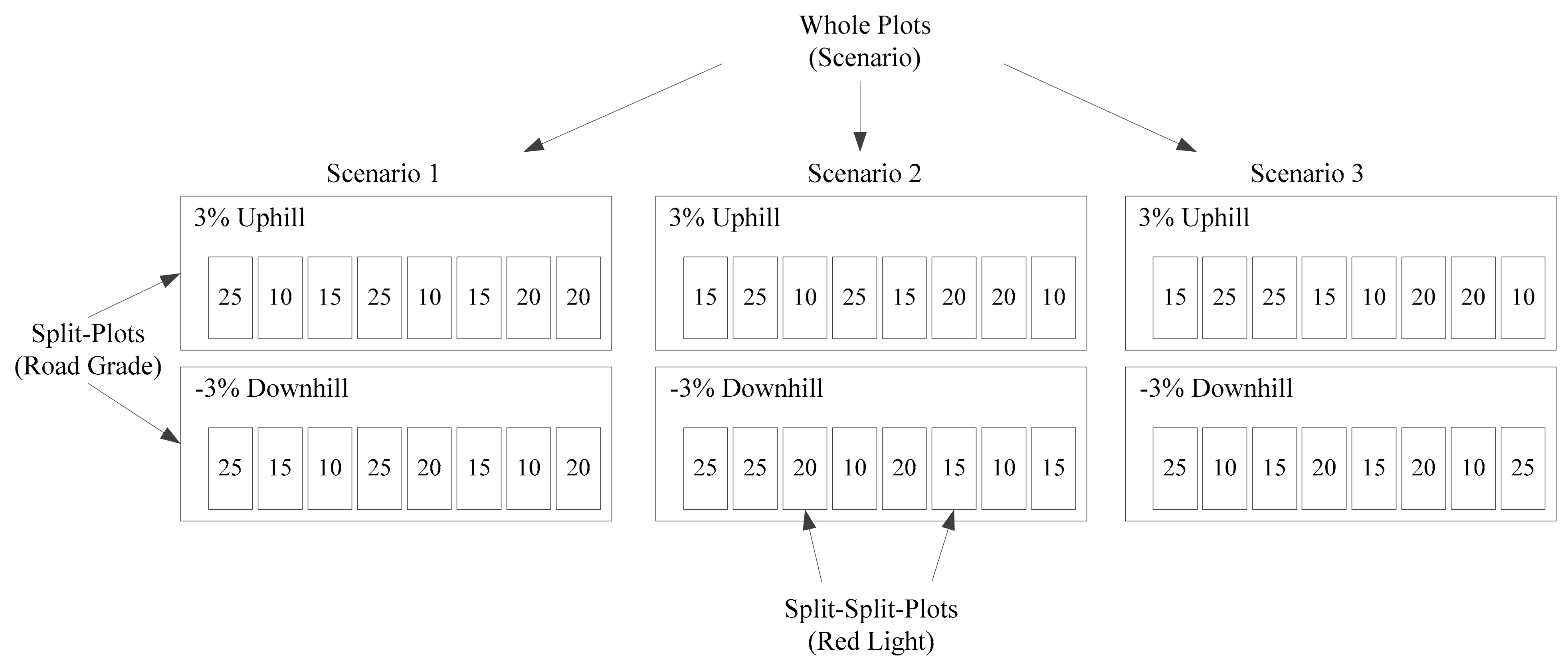
3.2. Experimental Design and Statistical Analysis
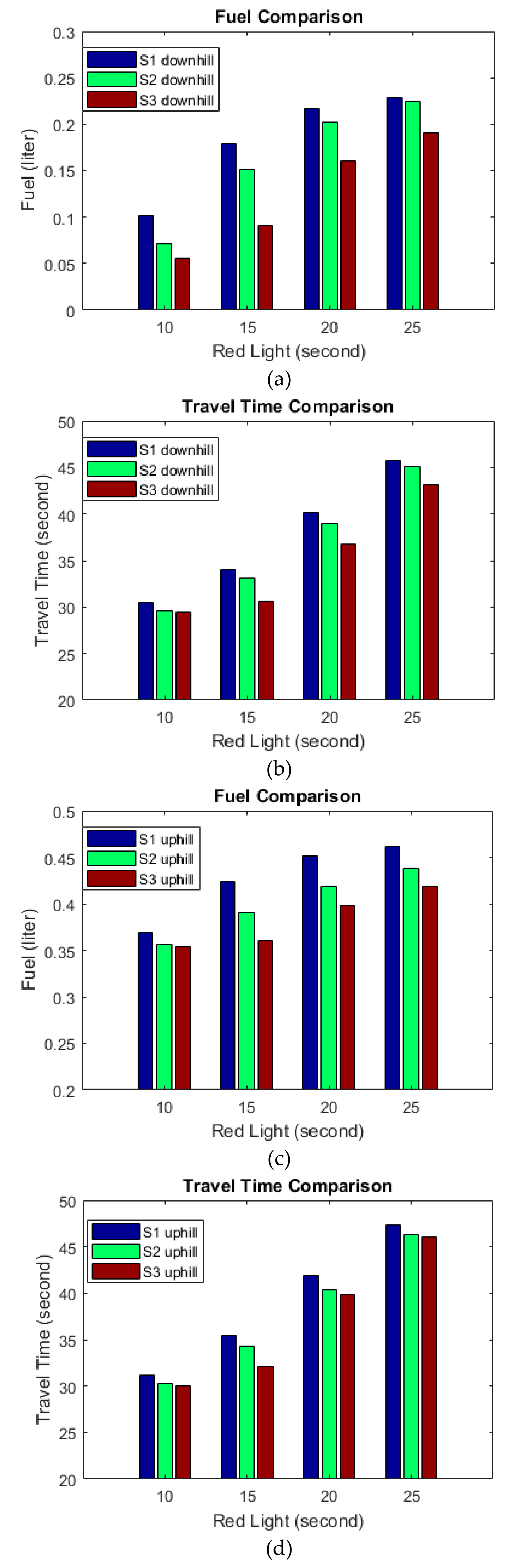
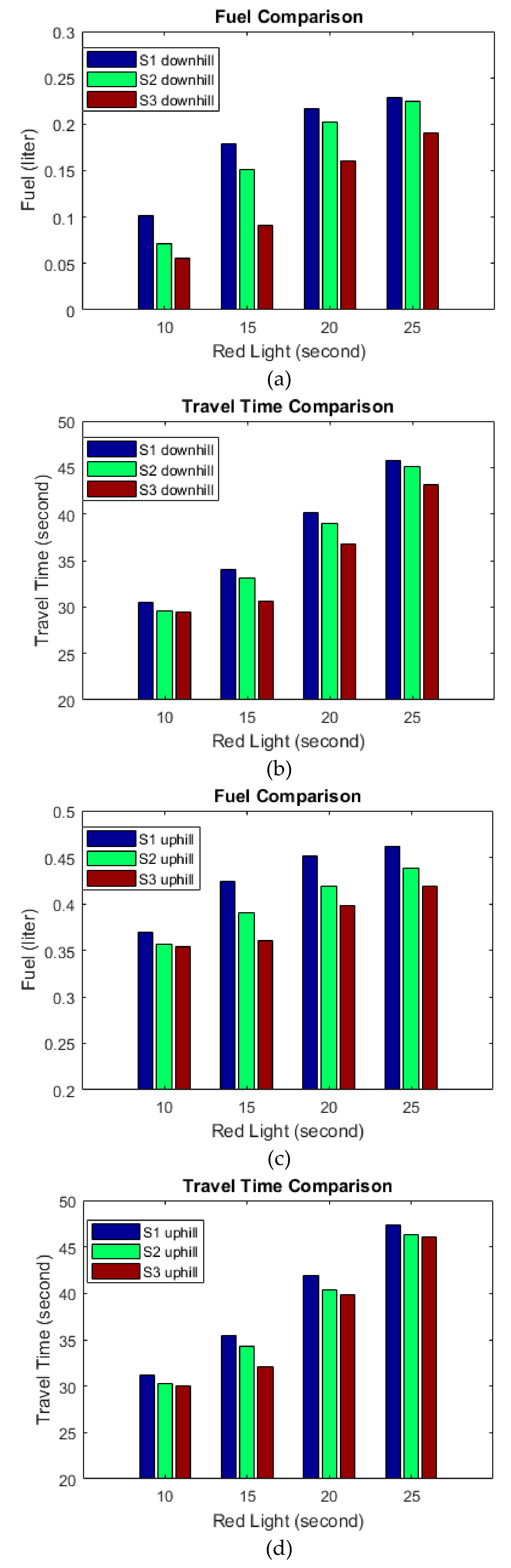
3.3. Quantitative Performance Analysis
4. Conclusions
- A fuel consumption model for diesel buses was used in the proposed system to compute instantaneous fuel consumption rates, because this model is easy to calibrate using easy-to-access bus data.
- The vehicle dynamics model, fuel consumption model, signal timings, and vehicle speed and distance relationship are used to construct an optimization problem.
- A moving-horizon dynamic program and an A-star algorithm is used to solve the optimization problem and calculate the energy-optimized vehicle trajectory to assist buses to proceed through signalized intersections efficiently. The proposed B-GLOSA system was implemented and field tested to validate the real-world benefits. The test results and the recommendations for future research are summarized below.
- The Virginia Smart Road test facility was used to conduct the field test using 30 participants. A split-split-plot experimental design was used to test the developed B-GLOSA system for different impact factors of road grades and red indication offsets, and statistical analysis was conducted to demonstrate that the fuel consumption performances were significantly different among three test scenarios.
- The quantitative analysis of the test results demonstrated that the proposed B-GLOSA system can greatly smooth the bus trajectory while traversing a signalized intersection, and simultaneously save fuel consumption and travel times.
- Compared to the uninformed drive, the test results demonstrated that the B-GLOSA can efficiently reduce fuel consumption by 22.1% and simultaneously reduce vehicle travel times by 6.1%.
- In future research, the B-GLOSA system will be tested within a microscopic simulation environment to quantify he network-level impact for various traffic conditions and heterogeneous traffic including LDVs and buses.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Barth, M.; Boriboonsomsin, K. Real-World Carbon Dioxide Impacts of Traffic Congestion. Transp. Res. Rec. J. Transp. Res. Board 2008, 2058, 163–171. [Google Scholar] [CrossRef] [Green Version]
- Rakha, H.; Ahn, K.; Trani, A. Comparison of MOBILE5a, MOBILE6, VT-MICRO, and CMEM models for estimating hot-stabilized light-duty gasoline vehicle emissions. Can. J. Civ. Eng. 2003, 30, 1010–1021. [Google Scholar] [CrossRef]
- Mahler, G.; Vahidi, A. Reducing idling at red lights based on probabilistic prediction of traffic signal timings. In Proceedings of the 2012 American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 6557–6562. [Google Scholar]
- Kamalanathsharma, R.K.; Rakha, H.A.; Yang, H. Networkwide Impacts of Vehicle Ecospeed Control in the Vicinity of Traffic Signalized Intersections. Transp. Res. Rec. J. Transp. Res. Board 2015, 2503, 91–99. [Google Scholar] [CrossRef]
- Ahn, K.; Rakha, H.A. Network-wide impacts of eco-routing strategies: A large-scale case study. Transp. Res. Part D Transp. Environ. 2013, 25, 119–130. [Google Scholar] [CrossRef]
- Abdelghaffar, H.M.; Rakha, H.A. A Novel Decentralized Game-Theoretic Adaptive Traffic Signal Controller: Large-Scale Testing. Sensors 2019, 19, 2282. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Saboohi, Y.; Farzaneh, H. Model for optimizing energy efficiency through controlling speed and gear ratio. Energy Effic. 2008, 1, 65–76. [Google Scholar] [CrossRef]
- Saboohi, Y.; Farzaneh, H. Model for developing an eco-driving strategy of a passenger vehicle based on the least fuel consumption. Appl. Energy 2009, 86, 1925–1932. [Google Scholar] [CrossRef]
- Barth, M.; Boriboonsomsin, K. Energy and emissions impacts of a freeway-based dynamic eco-driving system. Transp. Res. Part D Transp. Environ. 2009, 14, 400–410. [Google Scholar] [CrossRef]
- Malakorn, K.J.; Park, B. Assessment of mobility, energy, and environment impacts of IntelliDrive-based Cooperative Adaptive Cruise Control and Intelligent Traffic Signal control. In Proceedings of the 2010 IEEE International Symposium on Sustainable Systems and Technology (ISSST), Arlington, VA, USA, 17–19 May 2010; IEEE. [Google Scholar]
- Kamalanathsharma, R.K.; Rakha, H.A. Agent-Based Simulation of Ecospeed-Controlled Vehicles at Signalized Intersections. Transp. Res. Rec. J. Transp. Res. Board 2014, 2427, 1–12. [Google Scholar] [CrossRef]
- Asadi, B.; Vahidi, A. Predictive Cruise Control: Utilizing Upcoming Traffic Signal Information for Improving Fuel Economy and Reducing Trip Time. IEEE Trans. Control Syst. Technol. 2010, 19, 707–714. [Google Scholar] [CrossRef]
- Guan, T.; Frey, C.W. Predictive fuel efficiency optimization using traffic light timings and fuel consumption model. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, 6–9 October 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1553–1558. [Google Scholar]
- Fadzir, T.M.A.M.; Mansor, H.; Gunawan, T.S.; Janin, Z. Development of School Bus Security System Based on RFID and GSM Technonologies for Klang Valley Area. In Proceedings of the 2018 IEEE 5th International Conference on Smart Instrumentation, Measurement and Application (ICSIMA), Songkhla, Thailand, 28–30 November 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–5. [Google Scholar]
- Witten, T.; Samuel, A.; Guerrero, I.; Alden, A.; Rakha, H.; Wang, J.; Chen, H.; Mayer, B.; Edwards, A.; Connell, C.; et al. Transit Bus Routing On-Demand Developing an Energy-Saving System. 2015, Report No. 0704-0188, Federal Transit Administration. Available online: https://ridebt.org/images/documents/TIGGER-FINAL-REPORT.pdf (accessed on 8 December 2021).
- Nguyen, T.; Nguyen-Phuoc, D.Q.; Wong, Y.D. Developing artificial neural networks to estimate real-time onboard bus ride comfort. Neural Comput. Appl. 2021, 33, 5287–5299. [Google Scholar] [CrossRef]
- Zhang, L.; Liang, W.; Zheng, X. Eco-Driving for Public Transit in Cyber-Physical Systems Using V2I Communication. Int. J. Intell. Transp. Syst. Res. 2018, 16, 79–89. [Google Scholar] [CrossRef]
- Bagherian, M.; Mesbah, M.; Ferreira, L. Using Vehicle to Infrastructure Communication to Reduce Bus Fuel Consumption at Intersections. In Proceedings of the 95th Annual Meeting Transportation Research Board, Washington, DC, USA, 10–14 January 2016. [Google Scholar]
- Chen, H.; Rakha, H.A.; Almanna, M.; Loulizi, A.; El-Shawarby, I. Field Implementation of an Eco-cooperative Adaptive Cruise System at Signalized Intersections. In Proceedings of the 96th Annual Meeting Transportation Research Board, Washington, DC, USA, 8–12 January 2017. [Google Scholar]
- Rakha, H.A.; Chen, H.; Almanna, M.; Kamalanathsharma, R.K.; Loulizi, A.; El-Shawarby, I. Field Testing of Eco-Speed Control Using V2I Communication: Report No. 54-6001805, Connected Vehicle/Infrastructure University Transportation Center, U.S. Department of Transportation (CVI-UTC). 2016. Available online: https://cvi-utc.org/wp-content/uploads/2015/10/Rakha_Field-Testing-of-Eco-Speed-Control-Using-V2I-Communication_Final.pdf (accessed on 8 December 2021).
- Almannaa, M.H.; Chen, H.; Rakha, H.A.; Loulizi, A.; El-Shawarby, I. Reducing Vehicle Fuel Consumption and Delay at Signalized Intersections: Controlled-Field Evaluation of Effectiveness of Infrastructure-to-Vehicle Communication. Transp. Res. Rec. J. Transp. Res. Board 2017, 2621, 10–20. [Google Scholar] [CrossRef]
- Qi, X.; Wu, G.; Barth, M.J.; Boriboonsomsin, K.; Wang, P. Energy Impact of Connected Eco-driving on Electric Vehicles. In Road Vehicle Automation 4, 2nd ed.; Beiker, S., Gereon, M., Eds.; Springer: New York, NY, USA, 2017; Volume 4, pp. 97–111. [Google Scholar]
- Katsaros, K.; Kernchen, R.; Dianati, M.; Rieck, D. Performance study of a Green Light Optimized Speed Advisory (GLOSA) application using an integrated cooperative ITS simulation platform. In Proceedings of the 2011 7th International Wireless Communications and Mobile Computing Conference, Istanbul, Turkey, 4–8 July 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 918–923. [Google Scholar]
- Wang, J.; Rakha, H.A. Fuel consumption model for conventional diesel buses. Appl. Energy 2016, 170, 394–402. [Google Scholar] [CrossRef]
- Wang, J.; Rakha, H.A. Convex Fuel Consumption Model for Diesel and Hybrid Buses. Transp. Res. Rec. J. Transp. Res. Board 2017, 2647, 50–60. [Google Scholar] [CrossRef]
- Xia, H. Eco-Approach and Departure Techniques for Connected Vehicles at Signalized Traffic Intersections. Doctoral Dissertation, University of California, Oakland, CA, USA, 2014. Riverside. Available online: https://escholarship.org/uc/item/5xz408r4 (accessed on 8 December 2021).
- Kamalanathsharma, R.K. Eco-Driving in the Vicinity of Roadway Intersections-Algorithmic Development, Modeling, and Testing. Doctoral Dissertation, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2014. Available online: https://vtechworks.lib.vt.edu/handle/10919/56987 (accessed on 8 December 2021).
- Yu, K.; Yang, J.; Yamaguchi, D. Model predictive control for hybrid vehicle ecological driving using traffic signal and road slope information. Control Theory Technol. 2015, 13, 17–28. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhao, Z. A Multiple Mobile Robots Path planning Algorithm Based on A-star and Dijkstra Algorithm. Int. J. Smart Home 2014, 8, 75–86. [Google Scholar] [CrossRef] [Green Version]
- Feng, C. Transit Bus Load-Based Modal Emission Rate Model Development. Science Inventory. Doctoral Dissertation, Georgia Institute of Technology, Atlanta, GA, USA, 2007. Available online: https://smartech.gatech.edu/handle/1853/14583 (accessed on 8 December 2021).
- Young, K.; Lenné, M.G. Driver engagement in distracting activities and the strategies used to minimise risk. Saf. Sci. 2010, 48, 326–332. [Google Scholar] [CrossRef]
- Stutts, J.; Feaganes, J.; Reinfurt, D.; Rodgman, E.A.; Hamlet, C.; Gish, K.; Staplin, L. Driver’s exposure to distractions in their natural driving environment. Accid. Anal. Prev. 2005, 37, 1093–1101. [Google Scholar] [CrossRef]
- Jones, B.; Nachtsheim, C.J. Split-plot designs: What, why, and how. J. Qual. Technol. 2009, 41, 340–361. [Google Scholar] [CrossRef]
- Abdi, H. Guttman scaling. Encycl. Res. Des. 2010, 2, 1–5. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Response Variable | Source | DF | DFDen | F Ratio | p Value |
|---|---|---|---|---|---|
| Fuel Consumption | Scenario | 2 | 146 | 83.004 | <0.0001 |
| Red offset | 3 | 1255 | 1182.769 | <0.0001 | |
| Grade | 1 | 175 | 7355.448 | <0.0001 | |
| Scenario*Grade | 2 | 175 | 10.658 | 0.1872 | |
| Scenario*Red offset | 6 | 1255 | 12.449 | 0.0685 | |
| Red offset*Grade | 3 | 1255 | 30.084 | <0.0001 | |
| Scenario*Red offset*Grade | 6 | 1255 | 8.796 | 0.1236 | |
| Travel Time | Scenario | 2 | 146 | 660.503 | <0.0001 |
| Red offset | 3 | 1255 | 8623.917 | <0.0001 | |
| Grade | 1 | 175 | 131.278 | 0.0853 | |
| Scenario*Grade | 2 | 175 | 13.477 | 0.0762 | |
| Scenario*Red offset | 6 | 1255 | 53.352 | 0.1082 | |
| Red offset*Grade | 3 | 1255 | 0.900 | 0.4849 | |
| Scenario*Red offset*Grade | 6 | 1255 | 3.029 | 0.6215 |
| Direction | Red Offset (Sec) | Scenario 1 FC (Liter) | Scenario 2 FC (Liter) | Scenario 3 FC (Liter) | Difference between S2 and S1 (%) | Difference between S3 and S1 (%) |
|---|---|---|---|---|---|---|
| Downhill | 10 | 0.102 | 0.072 | 0.056 | −29.7% | −44.9% |
| 15 | 0.179 | 0.151 | 0.091 | −15.3% | −49.1% | |
| 20 | 0.217 | 0.202 | 0.161 | −6.7% | −25.8% | |
| 25 | 0.229 | 0.224 | 0.190 | −2.1% | −16.8% | |
| Uphill | 10 | 0.369 | 0.356 | 0.354 | −3.5% | −4.2% |
| 15 | 0.424 | 0.390 | 0.360 | −8.0% | −15.1% | |
| 20 | 0.451 | 0.419 | 0.399 | −7.1% | −11.6% | |
| 25 | 0.462 | 0.438 | 0.419 | −5.3% | −9.3% | |
| Downhill Average | 0.182 | 0.162 | 0.125 | −13.4% | −34.2% | |
| Uphill Average | 0.427 | 0.401 | 0.383 | −6.0% | −10.1% | |
| Total Average | 0.304 | 0.282 | 0.254 | −9.7% | −22.1% | |
| Direction | Red Offset (Sec) | Scenario 1 TT (Sec) | Scenario 2 TT (Sec) | Scenario 3 TT (Sec) | Difference between S2 and S1 (%) | Difference between S3 and S1 (%) |
|---|---|---|---|---|---|---|
| Downhill | 10 | 30.4 | 29.6 | 29.4 | −2.9% | −3.3% |
| 15 | 34.1 | 33.1 | 30.6 | −2.8% | −10.1% | |
| 20 | 40.1 | 39.0 | 36.7 | −2.9% | −8.5% | |
| 25 | 45.7 | 45.1 | 43.1 | −1.4% | −5.6% | |
| Uphill | 10 | 31.1 | 30.2 | 30.0 | −2.9% | −3.5% |
| 15 | 35.5 | 34.3 | 32.0 | −3.3% | −9.7% | |
| 20 | 42.0 | 40.3 | 39.9 | −3.9% | −5.0% | |
| 25 | 47.3 | 46.4 | 46.0 | −2.0% | −2.7% | |
| Downhill Average | 37.6 | 36.7 | 35.0 | −2.5% | −6.9% | |
| Uphill Average | 39.0 | 37.8 | 37.0 | −3.0% | −5.3% | |
| Total Average | 38.3 | 37.2 | 36.0 | −2.8% | −6.1% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Rakha, H.A. Developing and Field Testing a Green Light Optimal Speed Advisory System for Buses. Energies 2022, 15, 1491. https://doi.org/10.3390/en15041491
Chen H, Rakha HA. Developing and Field Testing a Green Light Optimal Speed Advisory System for Buses. Energies. 2022; 15(4):1491. https://doi.org/10.3390/en15041491
Chicago/Turabian StyleChen, Hao, and Hesham A. Rakha. 2022. "Developing and Field Testing a Green Light Optimal Speed Advisory System for Buses" Energies 15, no. 4: 1491. https://doi.org/10.3390/en15041491
APA StyleChen, H., & Rakha, H. A. (2022). Developing and Field Testing a Green Light Optimal Speed Advisory System for Buses. Energies, 15(4), 1491. https://doi.org/10.3390/en15041491