
Energy Savings in Hydraulic Hybrid Transmissions through Digital Hydraulics Technology




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Existing Hydraulic Hybrid Transmission Configurations
2.1. Parallel Hydraulic Hybrid Configuration
2.2. Series Hydraulic Hybrid Configuration
2.3. Series-Parallel Hydraulic Hybrid Configuration
3. Summary of Notable Mobile Applications Using Hydraulic Hybrid Drivetrains
4. Inadequacies of the Existing Hydraulic Hybrid Drivetrains
5. Digital Hydraulics
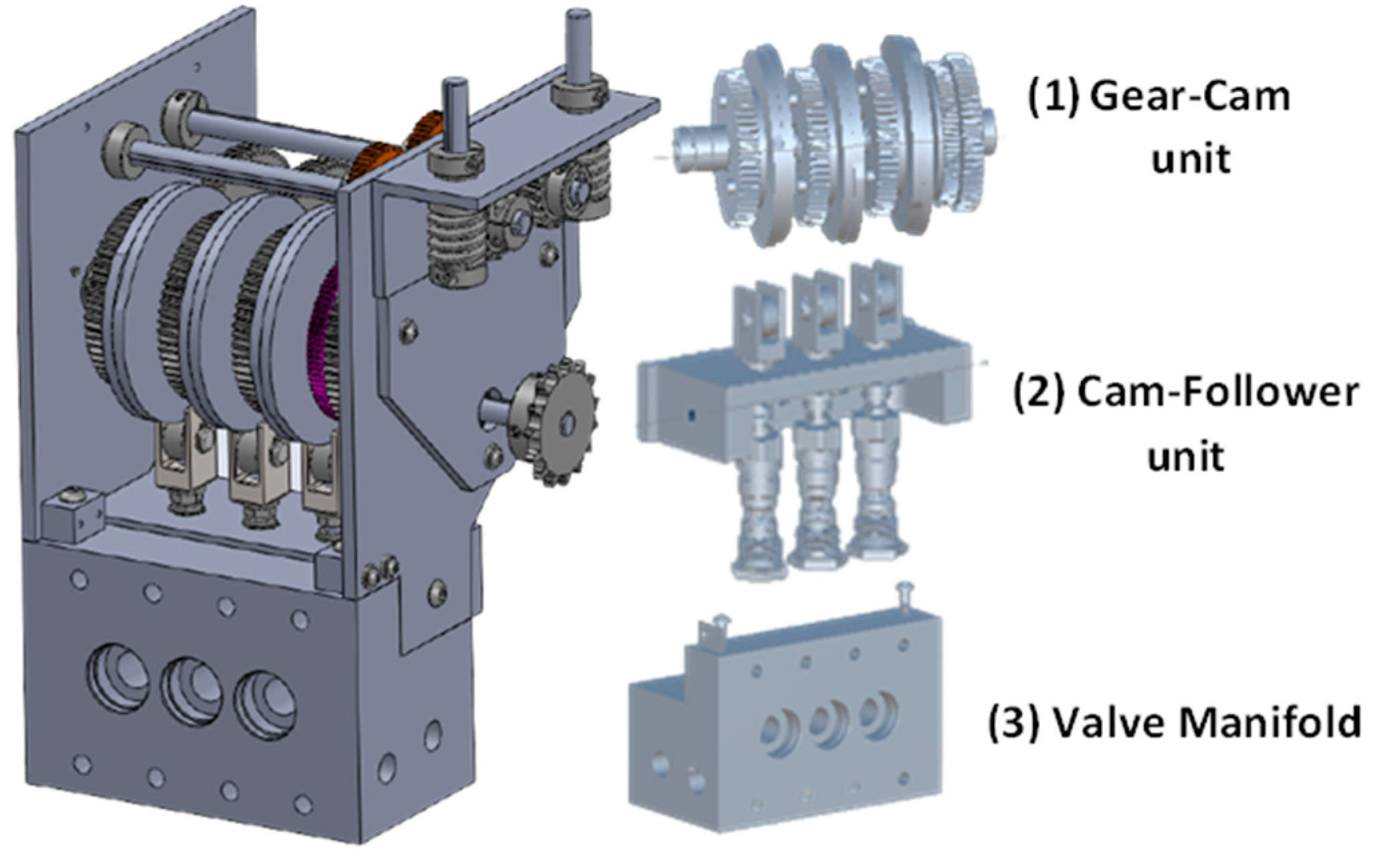
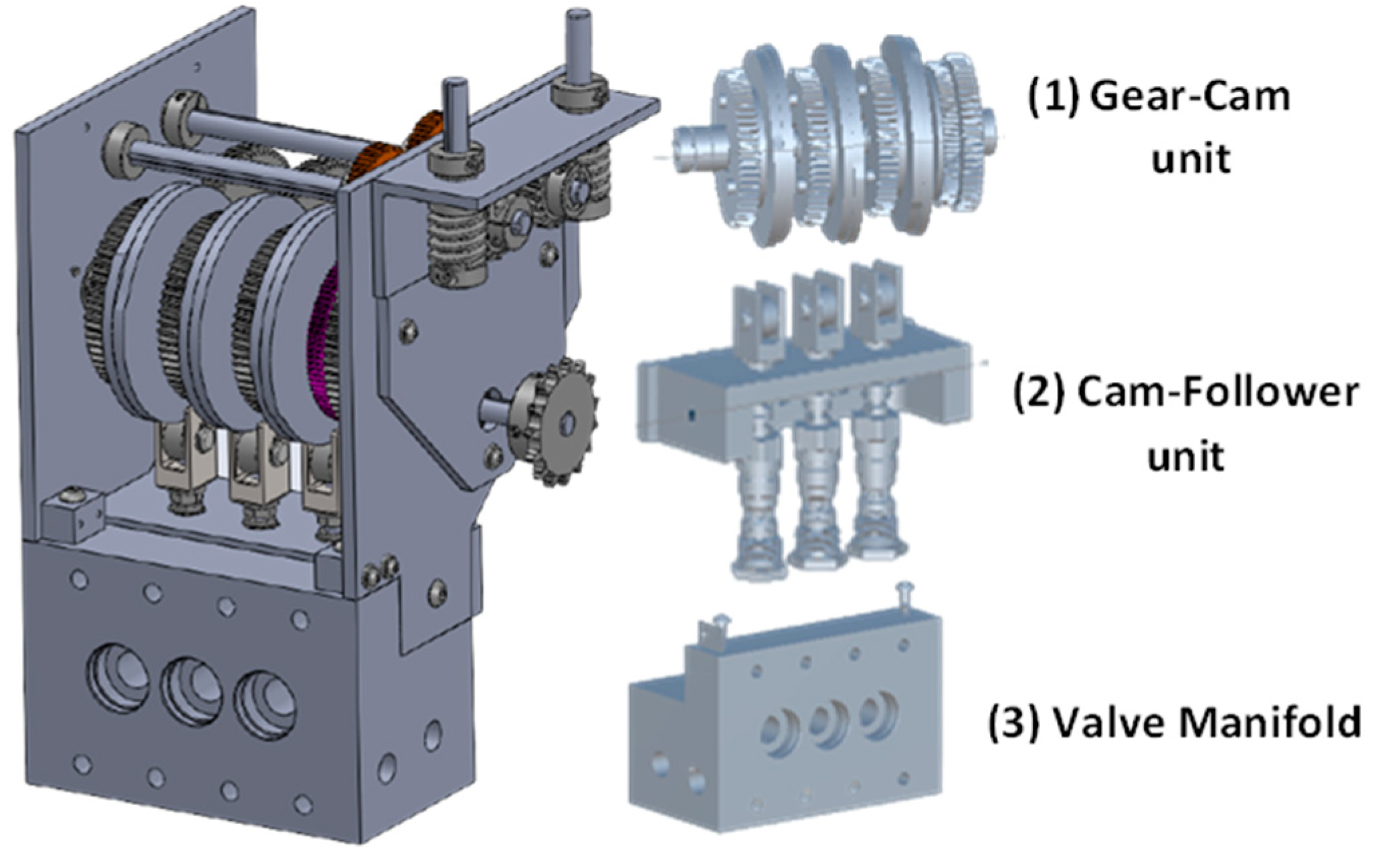
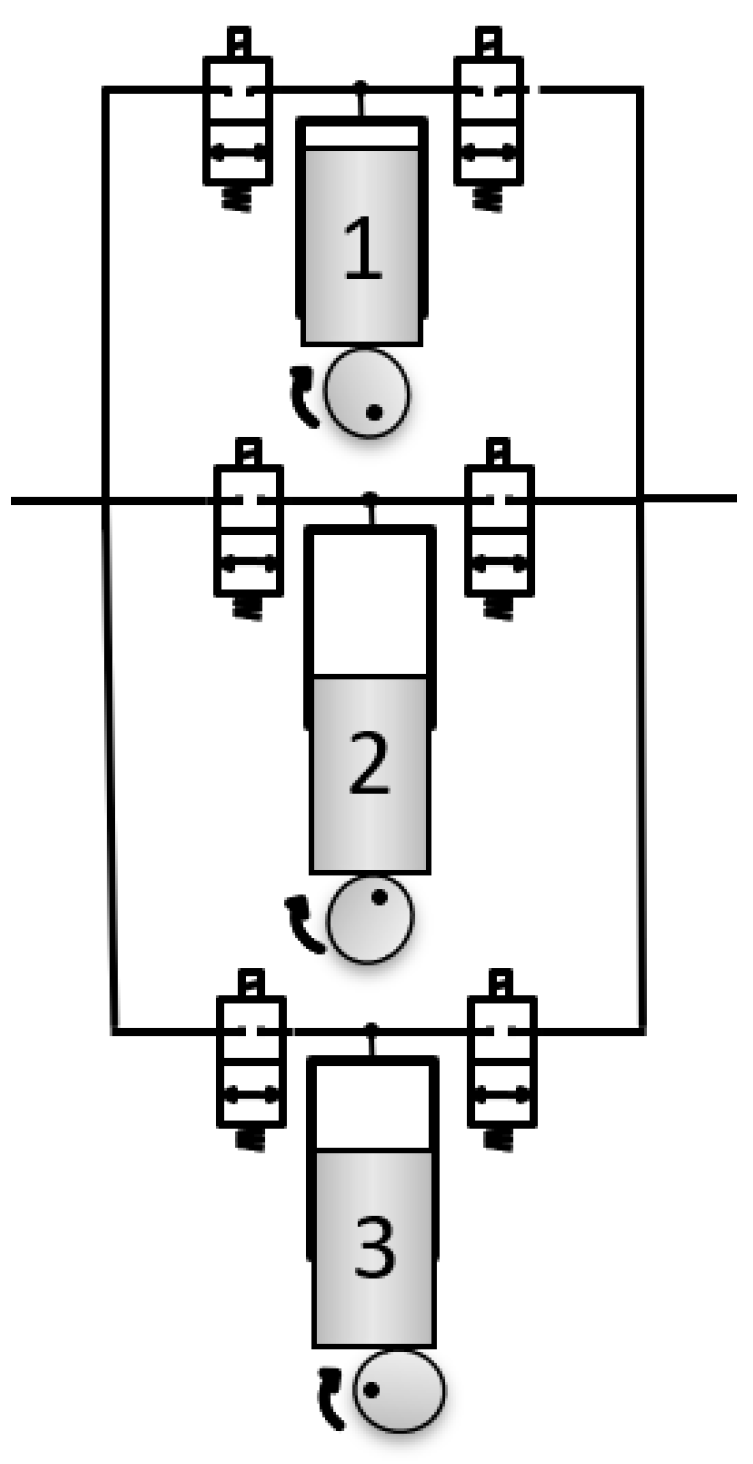
5.1. Internal Mechanical Structure of the Mechanically Actuated Digital Pump
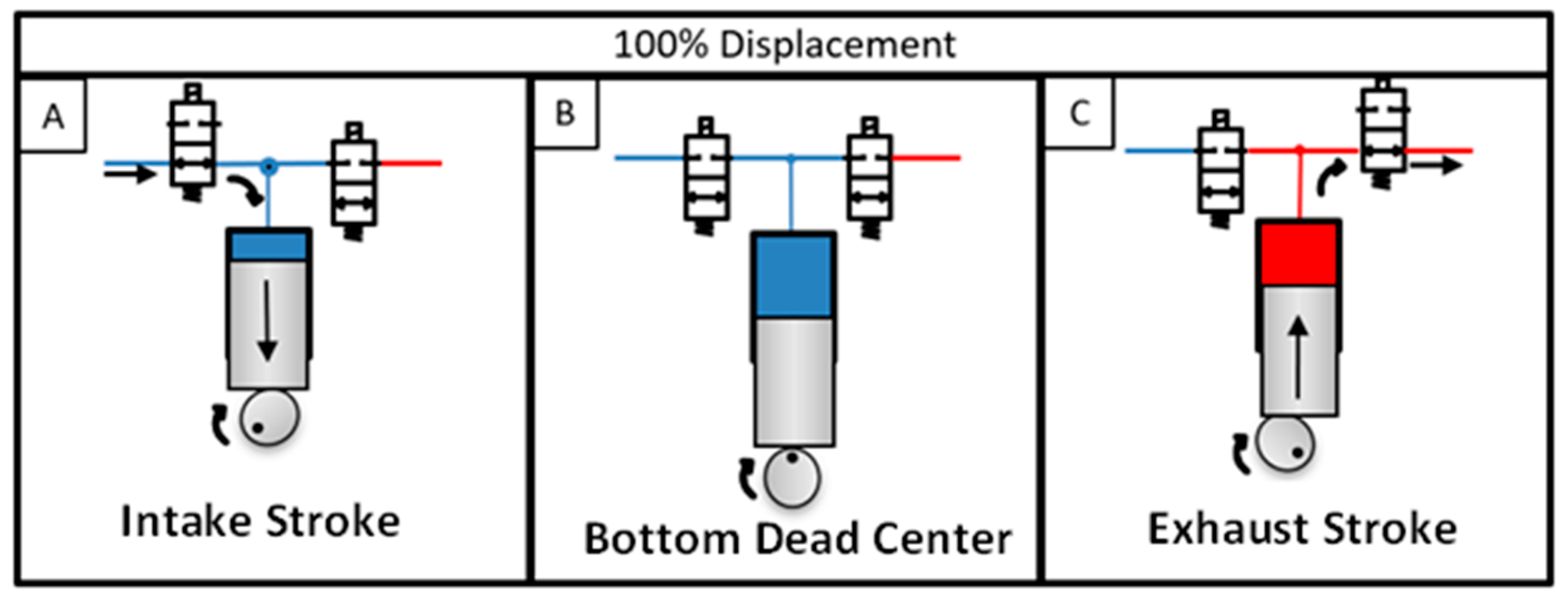
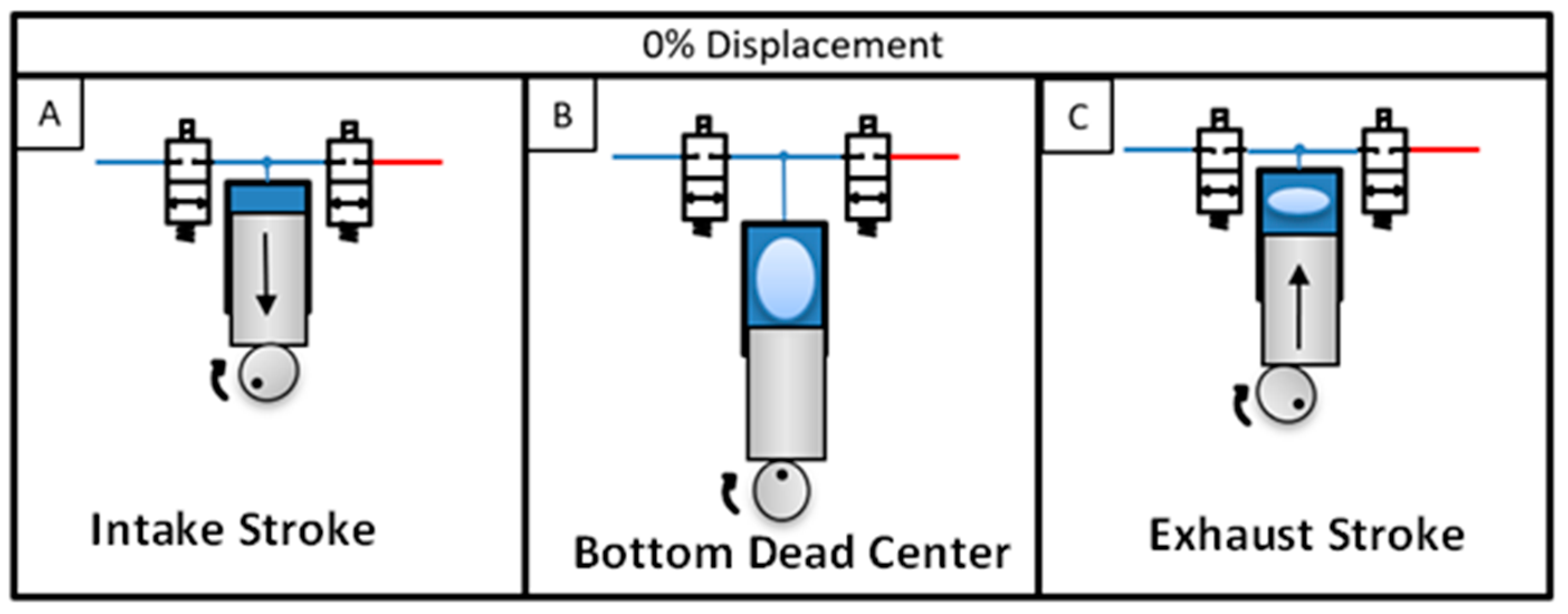
5.2. Operating Strategies of the State-of-the-Art Electrically Actuated Digital Pump
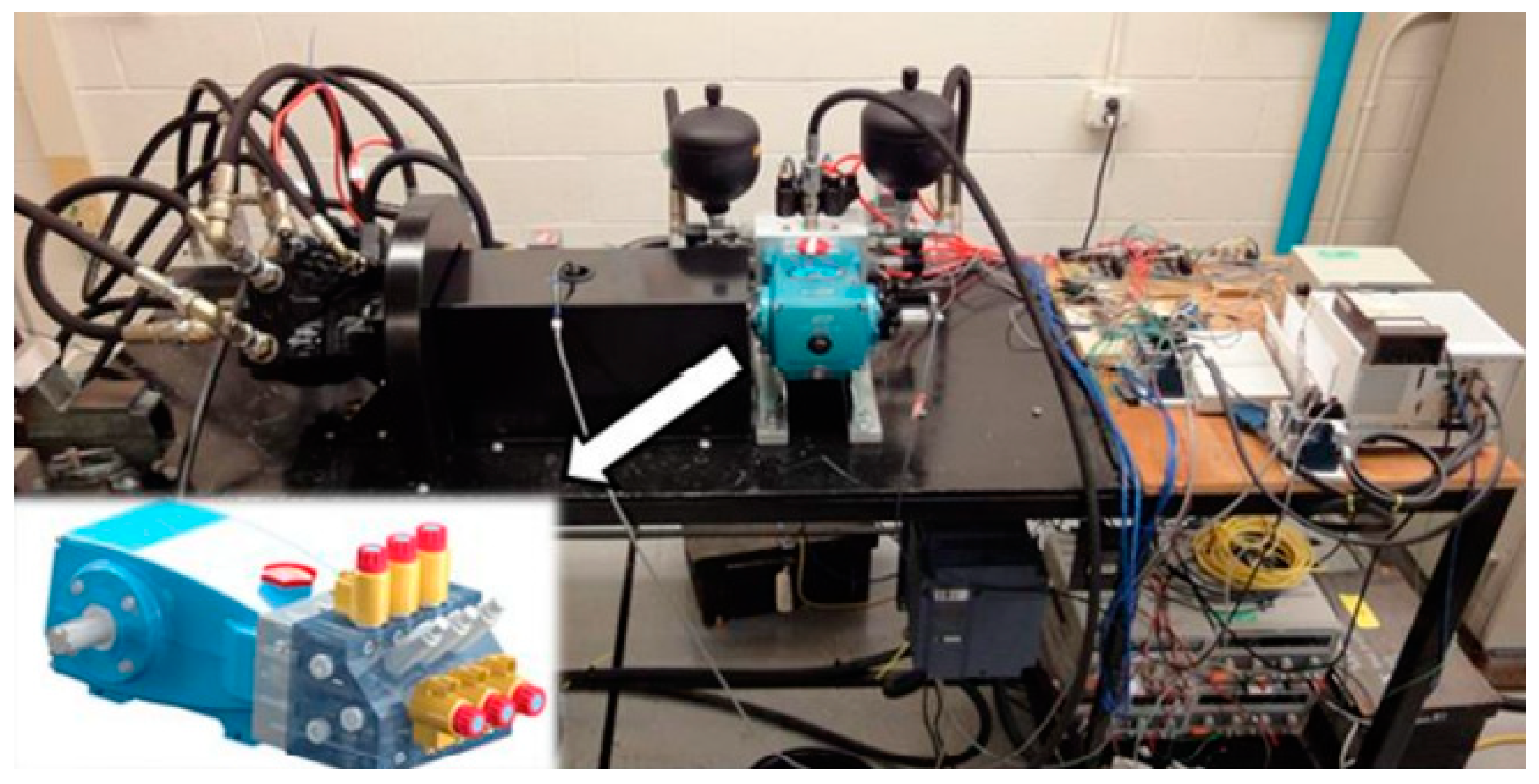
5.3. Experimental Validation of the Electrically Actuated Digital Pump/Motor
6. Simulation Model: Hydraulic Hybrid Drivetrains Utilizing Digital Pump/Motors
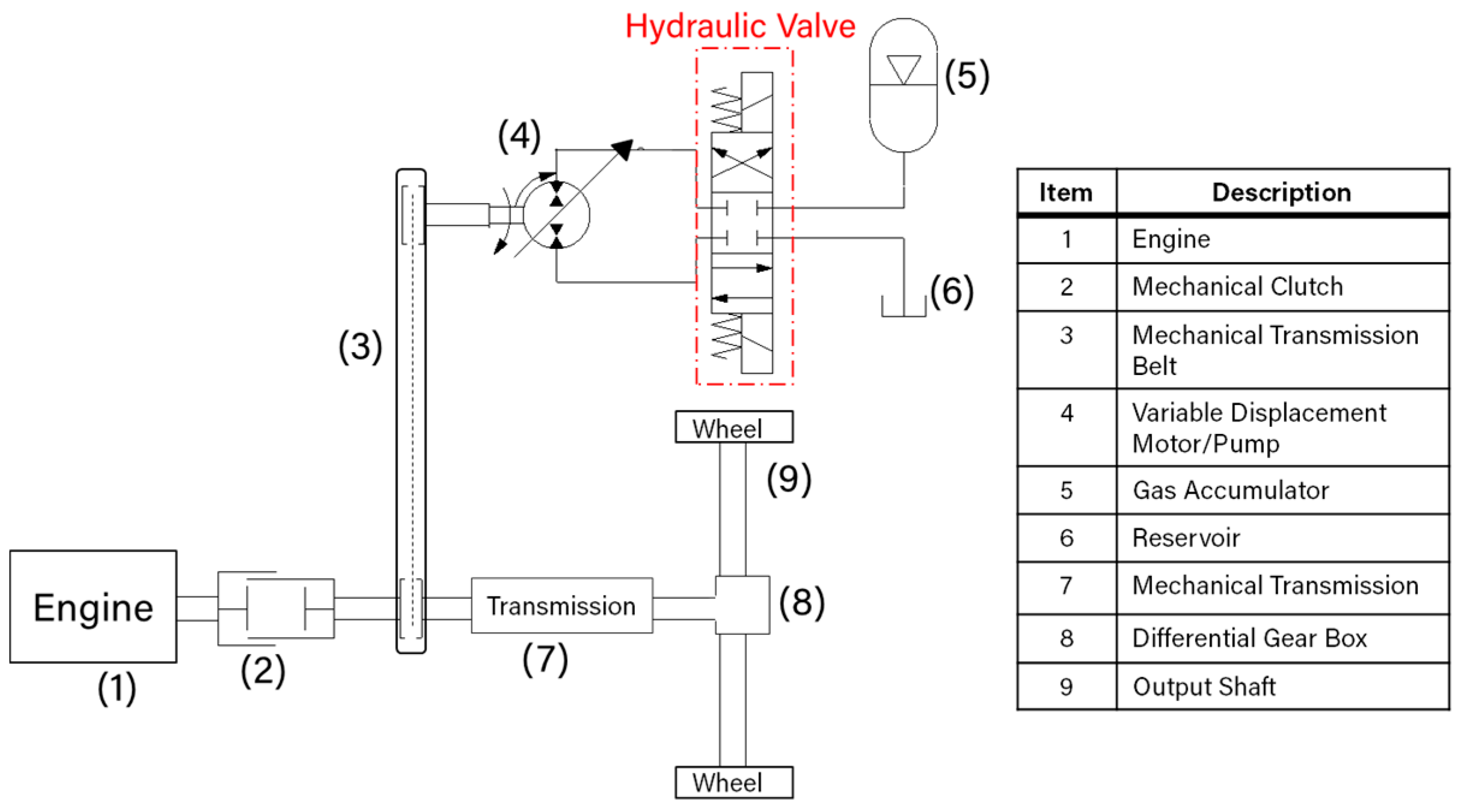
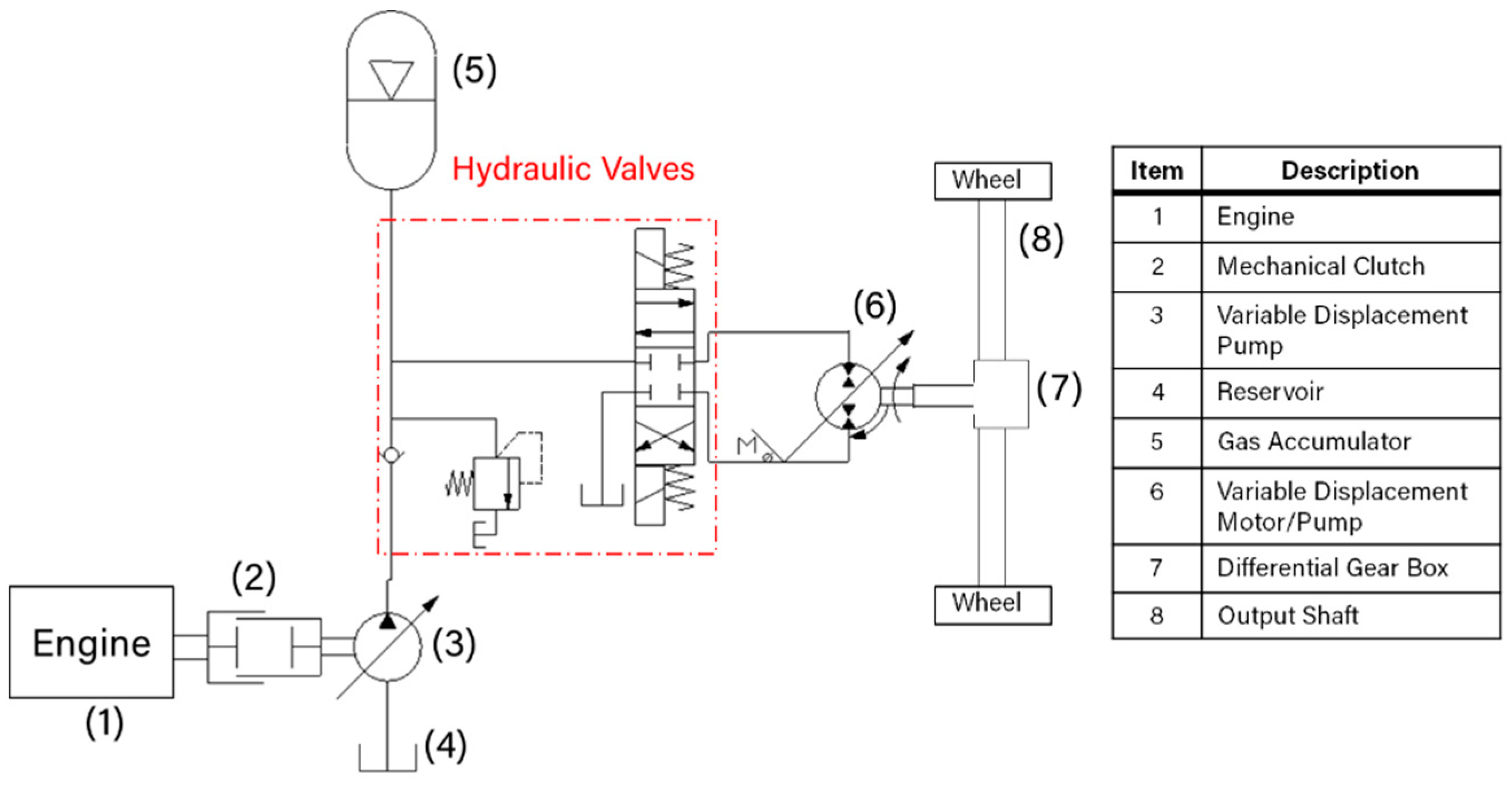
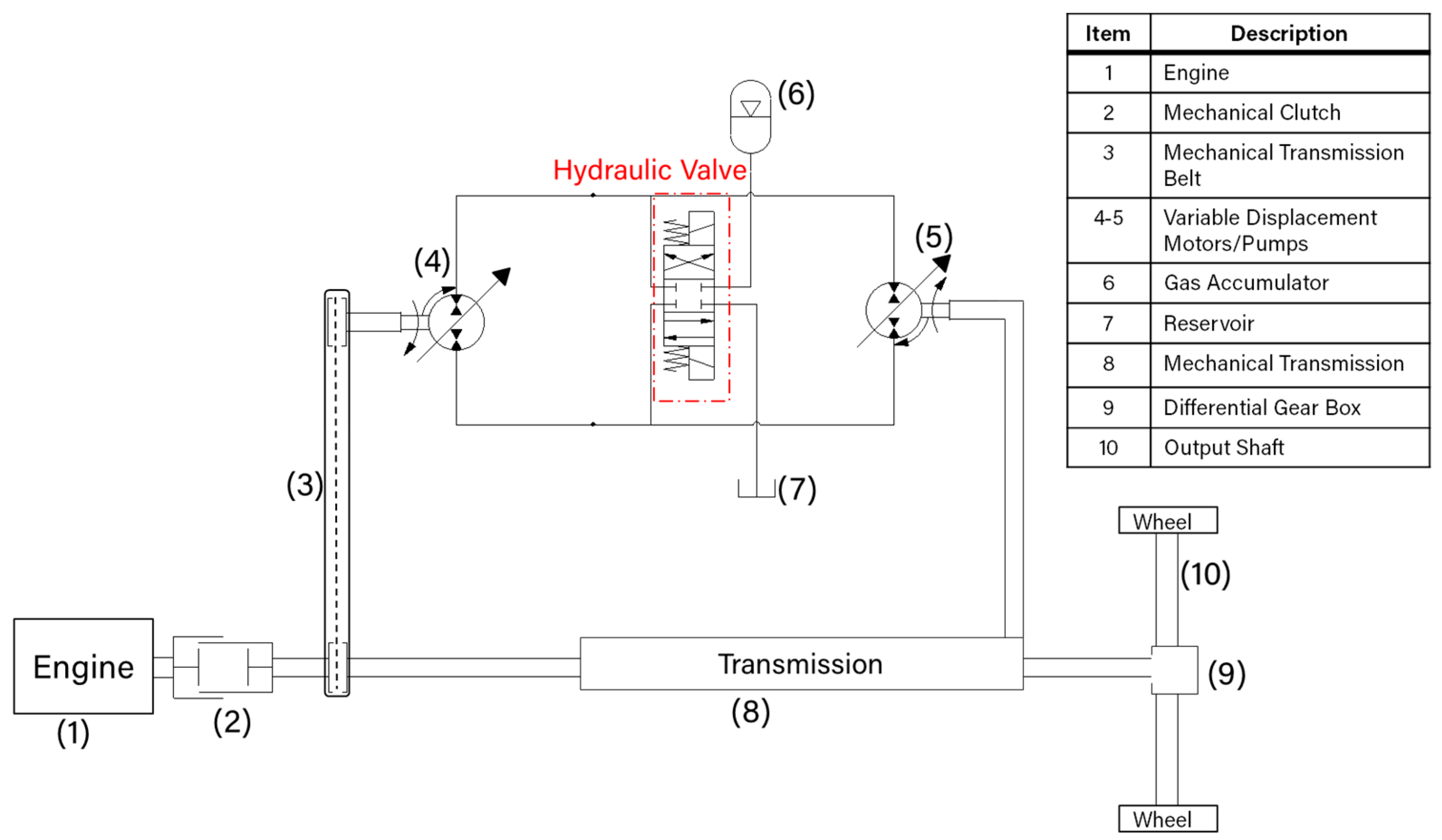
6.1. Circuit Schematics
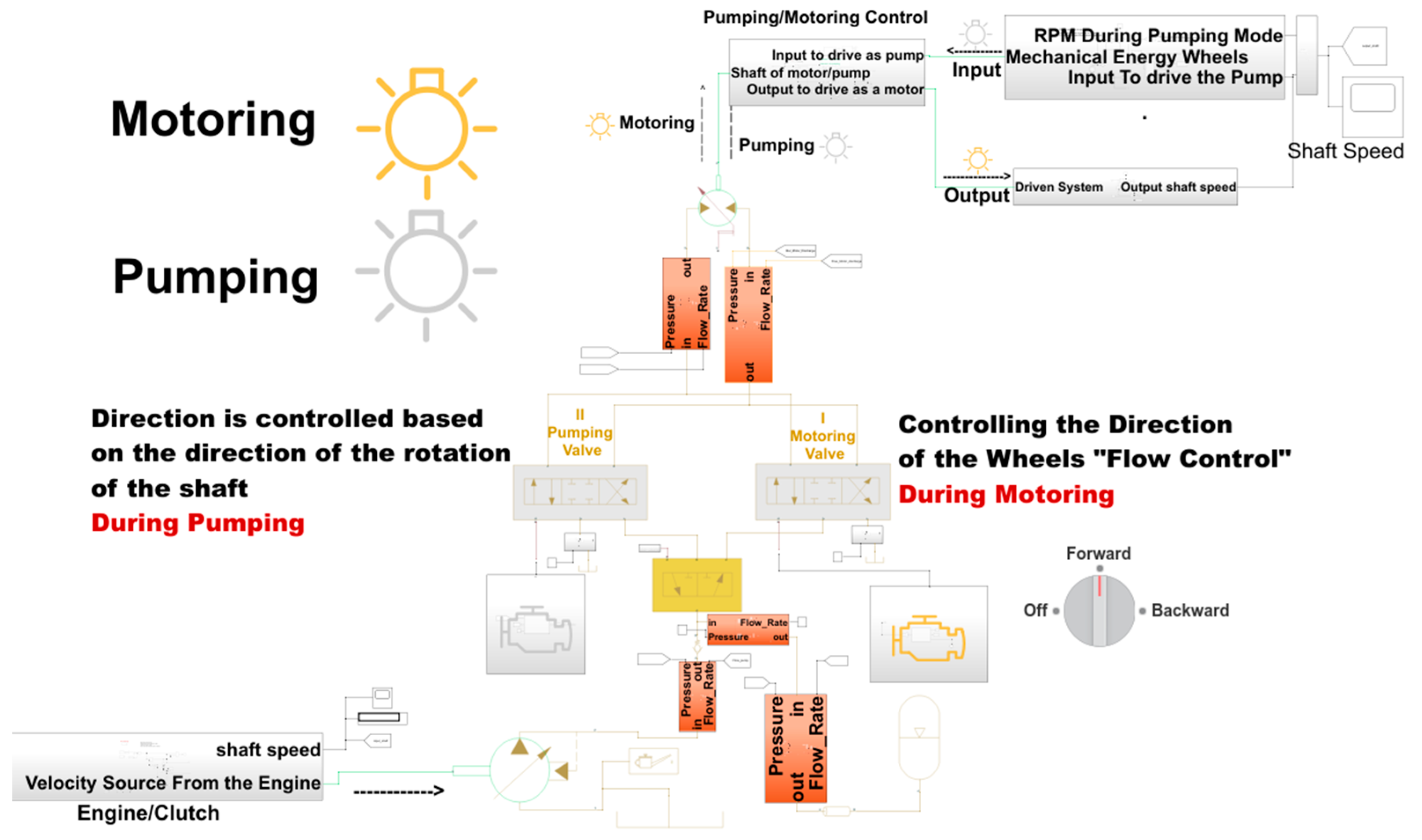
6.2. Simulation Model, Design, and Operation
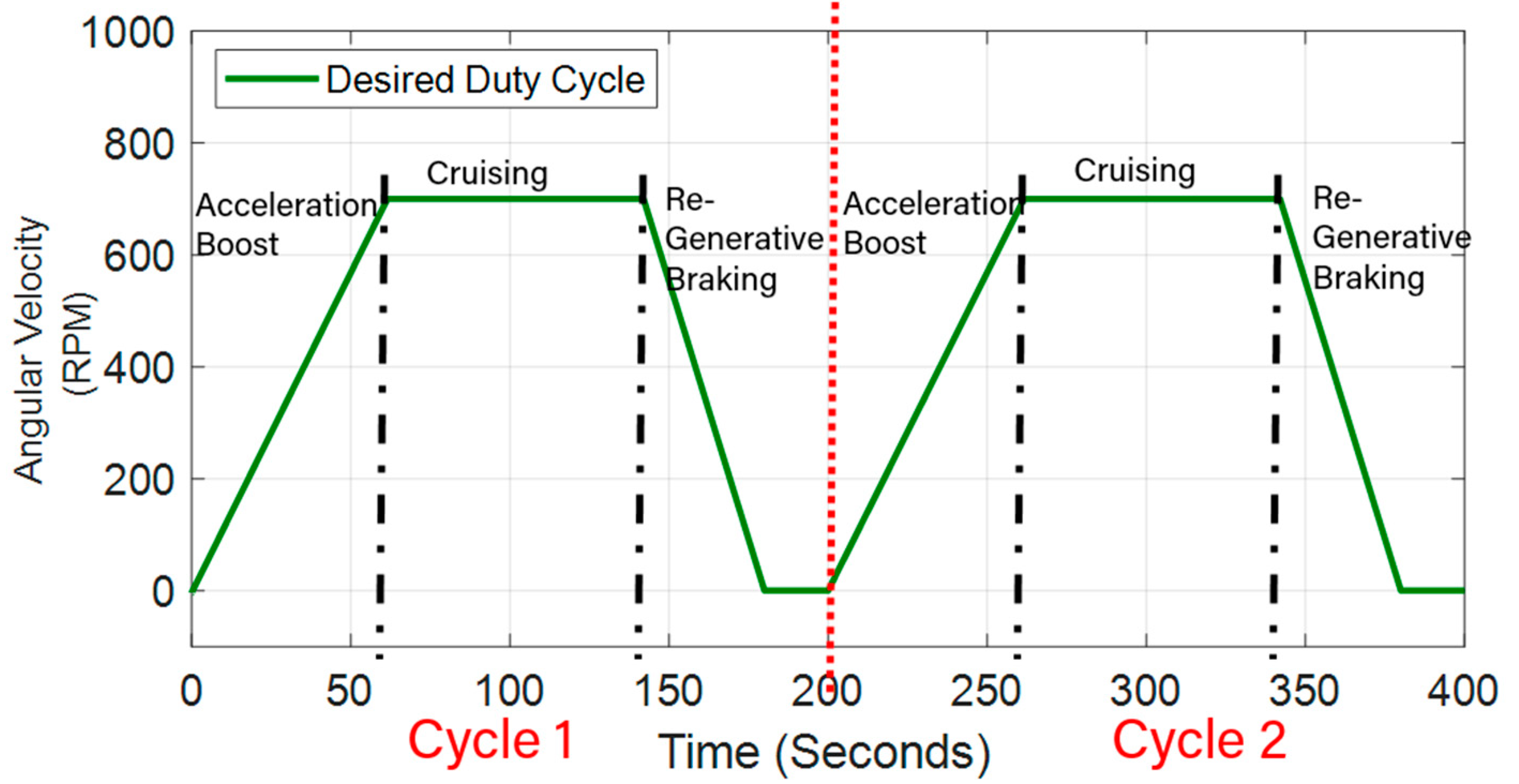
6.2.1. Acceleration
6.2.2. Cruising
6.2.3. Braking
7. Resulting Outcomes
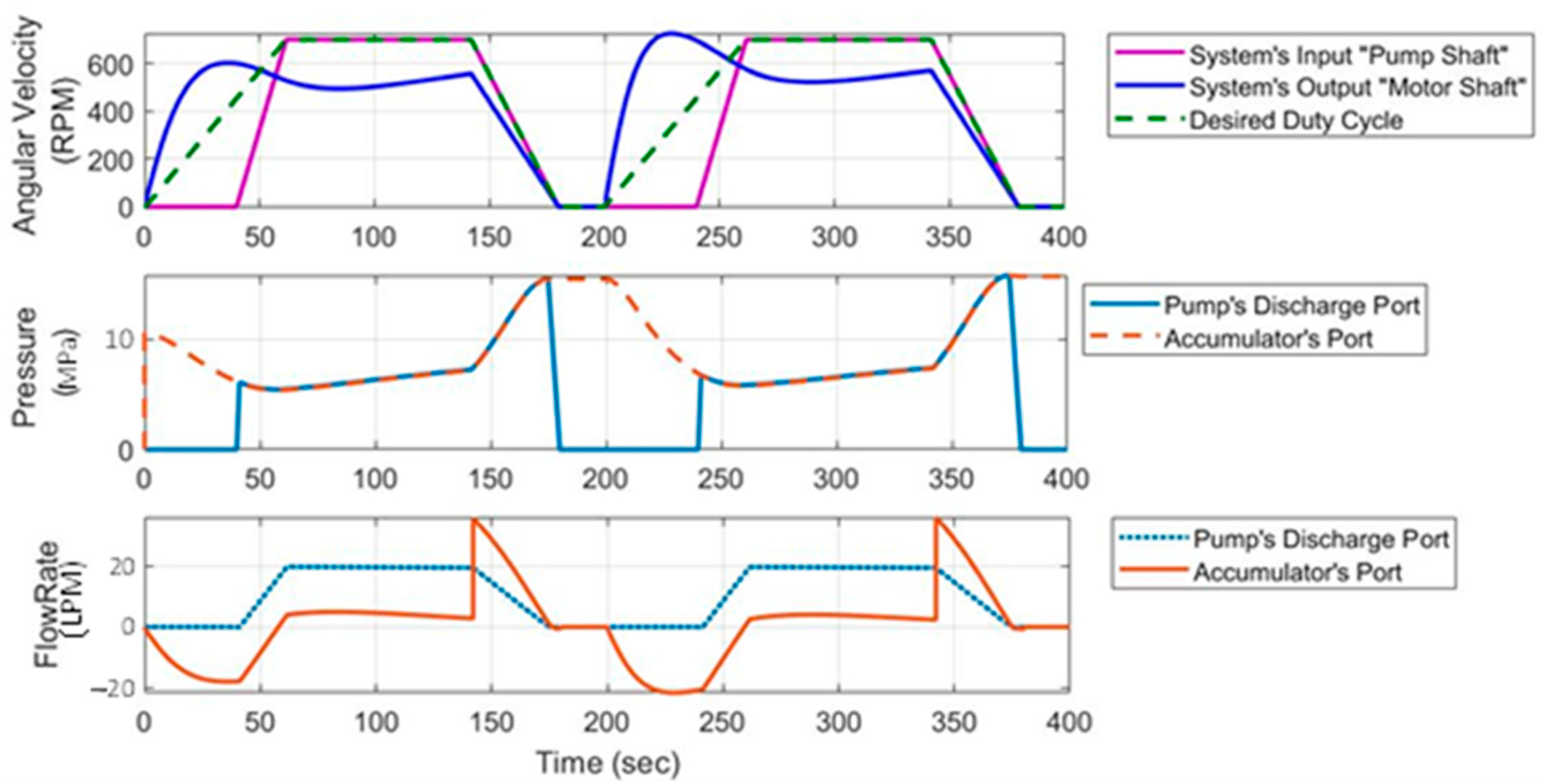
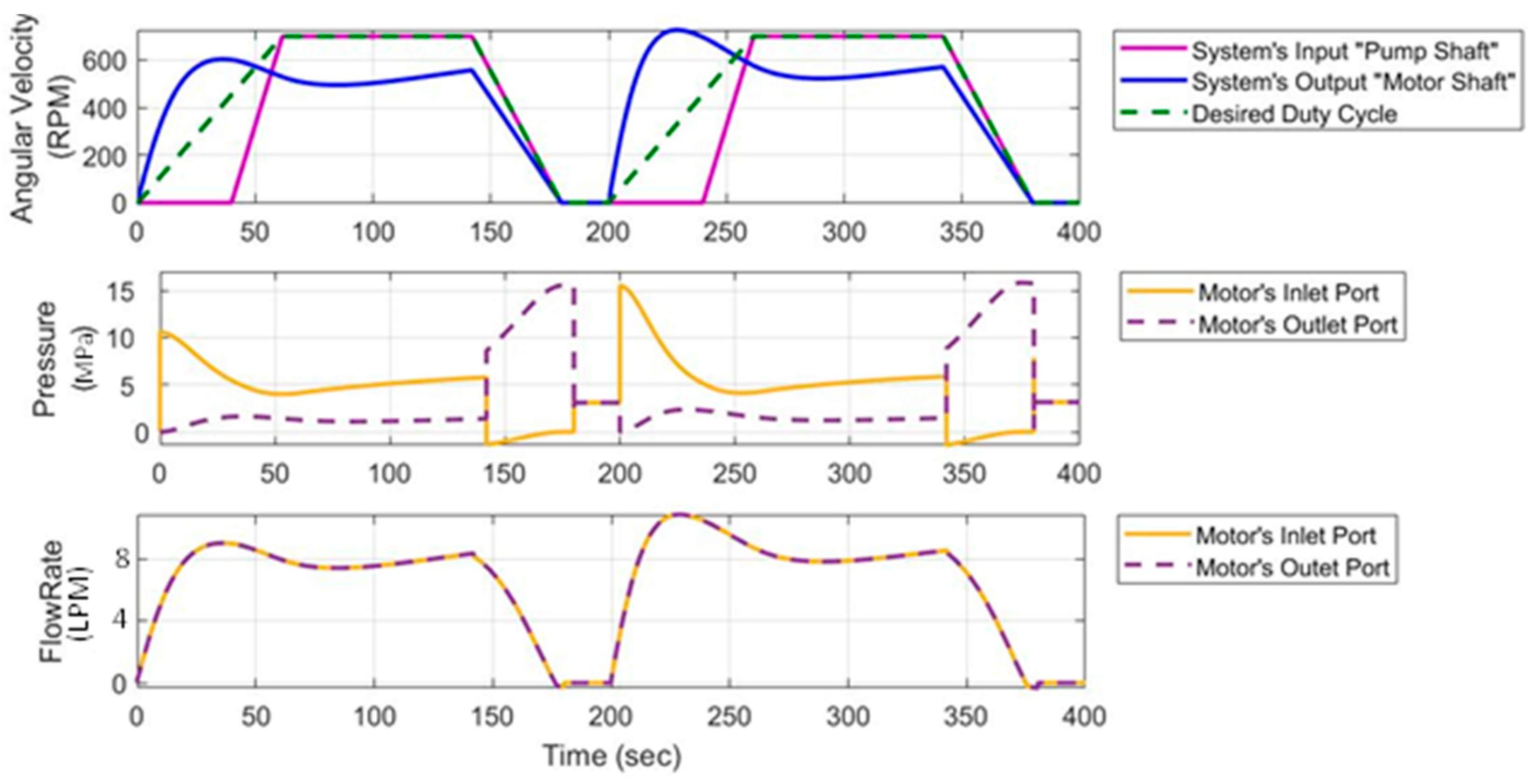
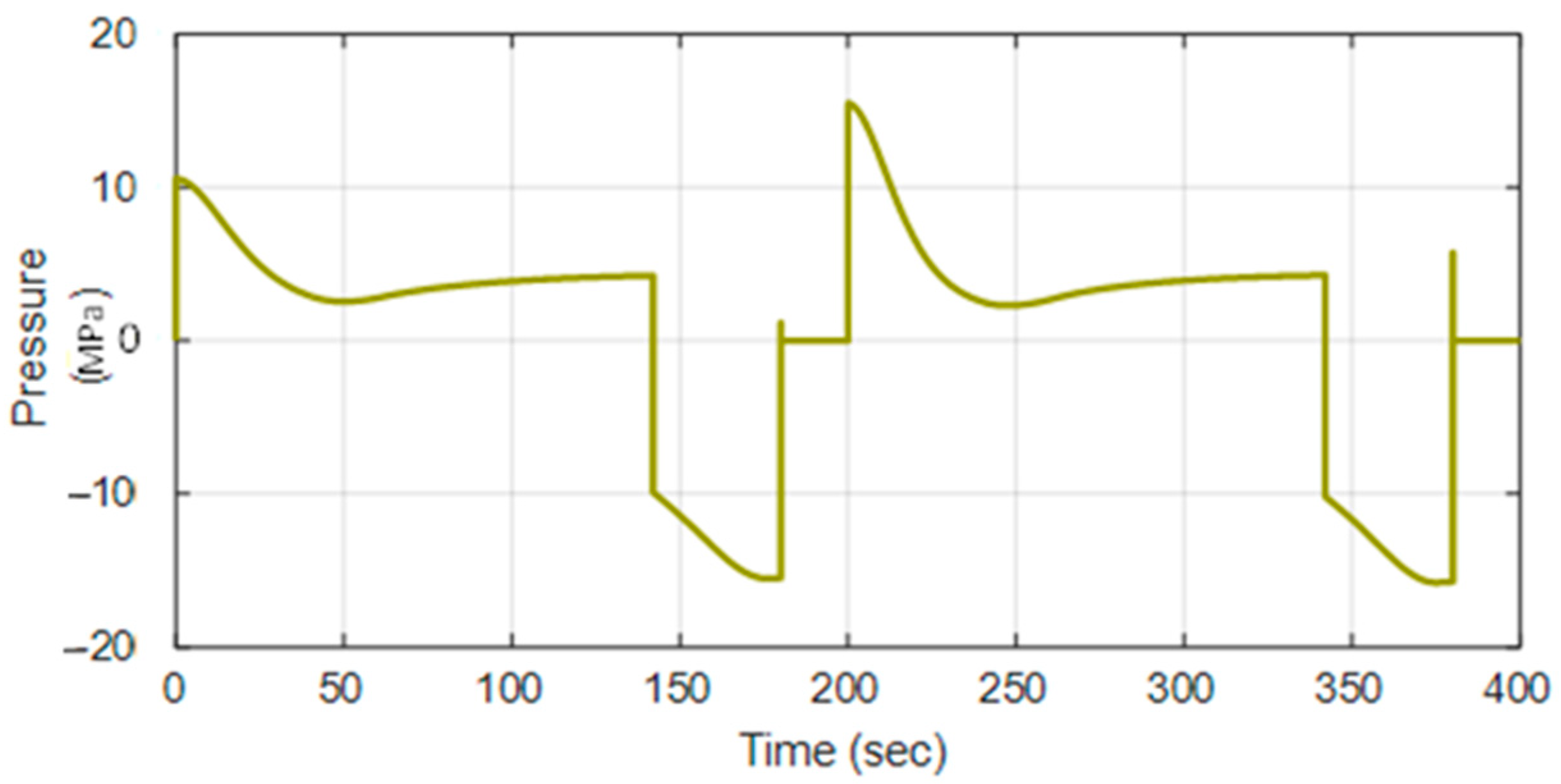
7.1. Pressure-Flow Outcomes
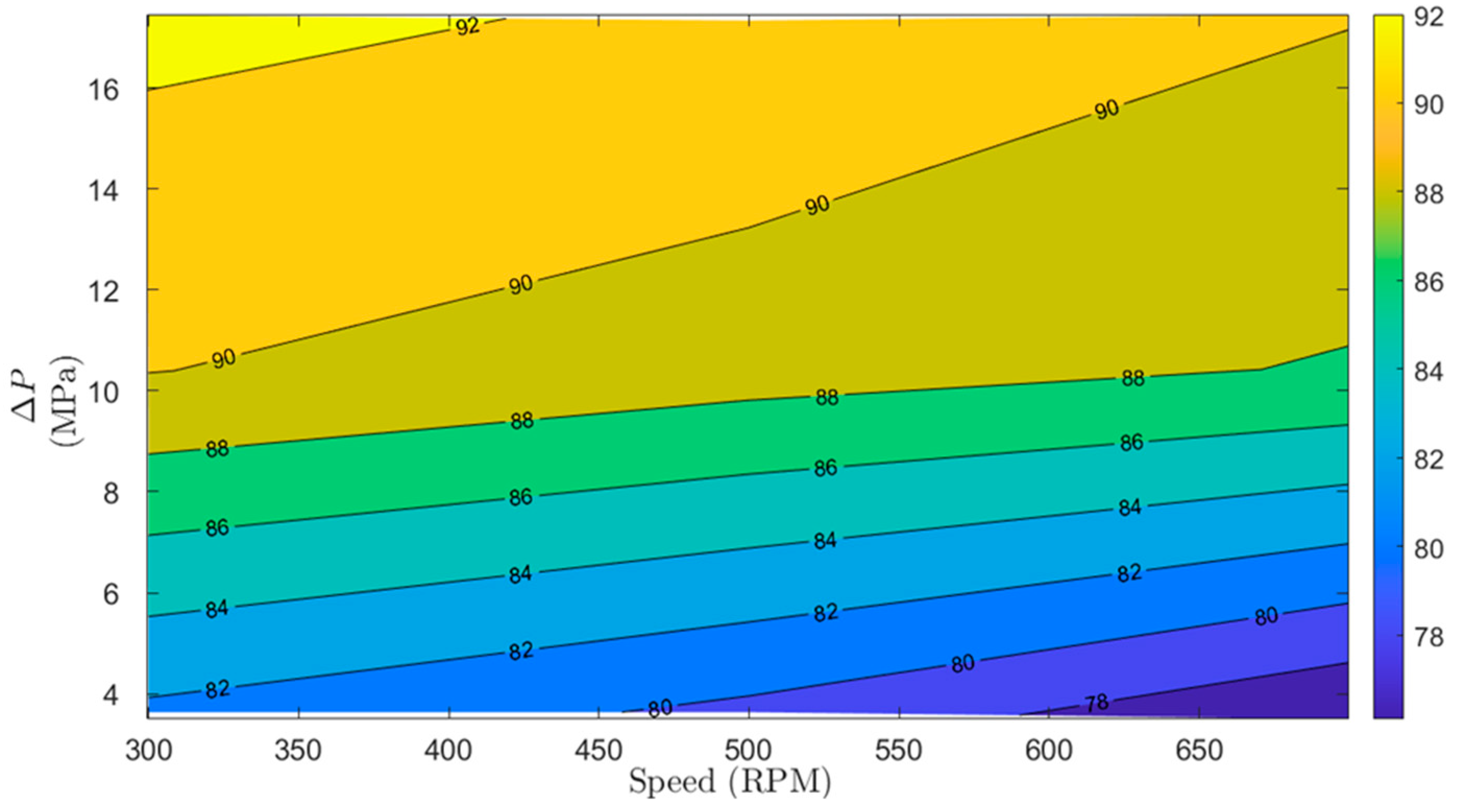
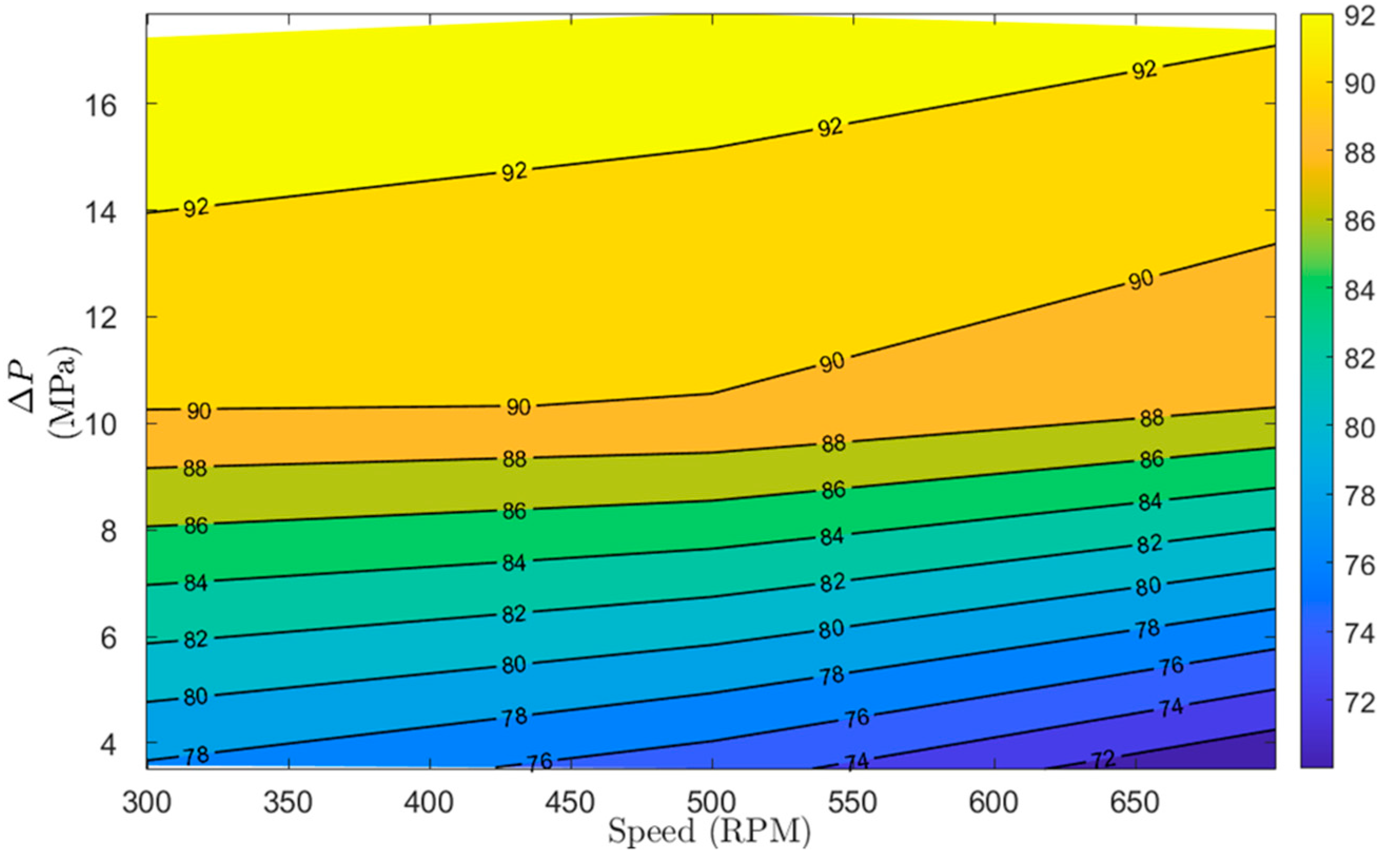
7.2. Power-Efficiency Outcomes
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- McCloy, D.; Martin, H.R. Control of Fluid Power: Analysis and Design, 2nd ed.; Ehlh: Chichester, UK, 1980; Available online: https://ui.adsabs.harvard.edu/abs/1980ehlh.book.....M/abstract (accessed on 10 October 2021).
- Durfee, W.; Sun, Z. Fluid Power System; A National Science Foundation Engineering Research Center: Minneapolis, MN, USA, 2009; pp. 1–48.
- Vacca, A. Energy Efficiency and Controllability of Fluid Power Systems. Energies 2018, 11, 1169. [Google Scholar] [CrossRef] [Green Version]
- Konami, S.; Nishiumi, T. Hydraulic Control Systems; John Wiley & Sons: Singapore, 2016; pp. 187–299. [Google Scholar] [CrossRef]
- Fabis-Domagala, J.; Domagala, M.; Momeni, H. A Concept of Risk Prioritization in FMEA Analysis for Fluid Power Systems. Energies 2021, 14, 6482. [Google Scholar] [CrossRef]
- What is Fluid Power? National Fluid Power Association. 2021. Available online: https://www.nfpa.com/home/AboutNFPA/What-is-Fluid-Power.htm (accessed on 1 December 2021).
- U.S. Fluid Power Industry Brief. 2021. Available online: https://www.nfpa.com/home/industry-stats/Industry-Brief.htm (accessed on 1 December 2021).
- Love, L.; Lanke, E.; Alles, P. Estimating the Impact (Energy, Emissions and Economics) of the US Fluid Power Industry. In Oak Ridge National Laboratory (Issue December). 2012. Available online: http://www.osti.gov/servlets/purl/1061537/ (accessed on 1 December 2021).
- Kwon, H.; Sprengel, M.; Ivantysynova, M. Thermal modeling of a hydraulic hybrid vehicle transmission based on thermodynamic analysis. Energy 2016, 116, 650–660. [Google Scholar] [CrossRef]
- Stelson, K.A.; Meyer, J.J.; Alleyne, A.G.; Hencey, B. Optimization of a passenger hydraulic hybrid vehicle to improve fuel economy. Proc. JFPS Int. Symp. Fluid Power 2008, 2008, 143–148. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.-S. Energy Efficiency Comparison between Hydraulic Hybrid and Hybrid Electric Vehicles. Energies 2015, 8, 4697–4723. [Google Scholar] [CrossRef] [Green Version]
- Gary, J. Hydrid Transmission. Acad. Manag. Rev. 2006, 31, 386–408. [Google Scholar]
- Zhang, Z.; Chen, J.; Wu, B. The control strategy of optimal brake energy recovery for a parallel hydraulic hybrid vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2012, 226, 1445–1453. [Google Scholar] [CrossRef]
- Rydberg, K.-E. Energy Efficient Hydraulic Hybrid Drives. In Proceedings of the 11th Scandinavian International Conference on Fluid Power, SICFP’09, Linköping, Sweden, 2–4 June 2009. [Google Scholar]
- Tvrdić, V.; Podrug, S.; Šuljić, I.; Matić, B. Hydraulic hybrid vehicle configurations and comparison with hybrid electric vehicle. In Proceedings of the Comtemporary Issues in Economy & Technology—CIET 2018, Split, Croatia, 1–2 June 2018; pp. 548–556. [Google Scholar]
- Florida, N.; López, C.; Pocomucha, V. CORE View metadata, citation and similar papers at core. ac. uk. J. Dedik. Pendidik. 2012, 2, 35–43. [Google Scholar]
- Shan, M. Modeling and Control Strategy for Series Hydraulic Hybrid Vehicles. Ph.D. Thesis, The University of Toledo, Toledo, OH, USA, December 2009. [Google Scholar]
- Tavares, F.; Johri, R.; Salvi, A.; Baseley, S.; Filipi, Z. Hydraulic Hybrid Powertrain-In-the-Loop Integration for Analyzing Real-World Fuel Economy and Emissions Improvements. SAE Technical Paper. 2011. Available online: https://doi.org/10.4271/2011-01-2275 (accessed on 20 October 2021).
- Midgley, W.; Cebon, D. Comparison of regenerative braking technologies for heavy goods vehicles in urban environments. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2012, 226, 957–970. [Google Scholar] [CrossRef]
- Li, C.-T.; Peng, H. Optimal configuration design for hydraulic split hybrid vehicles. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 5812–5817. [Google Scholar] [CrossRef]
- Kim, N.; Rousseau, A. A Comparative Study of Hydraulic Hybrid Systems for Class 6 Trucks. SAE Tech. Pap. 2013, 2. [Google Scholar] [CrossRef]
- Sprengel, M.; Bleazard, T.; Haria, H.; Ivantysynova, M. Implementation of a Novel Hydraulic Hybrid Powertrain in a Sports Utility Vehicle. IFAC-PapersOnLine 2015, 48, 187–194. [Google Scholar] [CrossRef]
- Bottiglione, F.; Mantriota, G.; Valle, M. Power-Split Hydrostatic Transmissions for Wind Energy Systems. Energies 2018, 11, 3369. [Google Scholar] [CrossRef] [Green Version]
- Jae, Y.; Filipi, Z.; Kim, Y.J.; Filipi, Z. Simulation Study of a Series Hydraulic Hybrid Prop System for a Light Truck. SAE Trans. 2021, 116, 147–161. [Google Scholar]
- Hui, S.; Junqing, J. Research on the system configuration and energy control strategy for parallel hydraulic hybrid loader. Autom. Constr. 2010, 19, 213–220. [Google Scholar] [CrossRef]
- Zhou, S.; Walker, P.; Tian, Y.; Zhang, N. Mode switching analysis and control for a parallel hydraulic hybrid vehicle. Veh. Syst. Dyn. 2020, 59, 928–948. [Google Scholar] [CrossRef]
- Sim, T.P.; Li, P.Y. Analysis and Control Design of a Hydro-Mechanical Hydraulic Hybrid Passenger Vehicle. In Proceedings of the Dynamic Systems and Control Conference, Hollywood, CA, USA, 12–14 October 2009; pp. 667–674. [Google Scholar] [CrossRef] [Green Version]
- Cheong, K.L. Design and Analysis of Hydraulic Hybrid Passenger Vehicles. Ph.D. Thesis, University of Minnesota, Minneapolis, MN, USA, 2015. [Google Scholar]
- Ramdan, M.I.; A Stelson, K. Optimal design of a power-split hybrid hydraulic bus. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2016, 230, 1699–1718. [Google Scholar] [CrossRef]
- Sprengel, M.; Ivantysynova, M. Recent Developments in a Novel Blended Hydraulic Hybrid Transmission. SAE Tech. Pap. 2014, 2014. [Google Scholar] [CrossRef]
- Stecki, J.; Matheson, P. Advances In Automotive Hydraulic Hybrid Drives. Proc. JFPS Int. Symp. Fluid Power 2005, 2005, 664–669. [Google Scholar] [CrossRef] [Green Version]
- Matheson, P.; Stecki, J. Development and simulation of a hydraulic-hybrid powertrain for use in commercial heavy vehicles. SAE Tech. Pap. 2003, 112, 114–123. [Google Scholar] [CrossRef]
- Wu, B.; Lin, C.-C.; Filipi, Z.; Peng, H.; Assanis, D. Optimal Power Management for a Hydraulic Hybrid Delivery Truck. Veh. Syst. Dyn. 2004, 42, 23–40. [Google Scholar] [CrossRef]
- Van Batavia, B.L. Hydraulic Hybrid Vehicle Energy Management System; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2009. [Google Scholar] [CrossRef]
- Achten, P.A.J.; Schellekens, M.P.A.; Murrenhoff, H.; Deeken, M. Efficiency and Low Speed Behavior of the Floating Cup Pump. J. Commer. Veh. 2004, 113, 366–376. [Google Scholar] [CrossRef]
- Buchwald, P.; Christensen, G.; Larsen, H.; Sunn Pedersen, P. Improvement of citybus fuel economy using a hydraulic hybrid propulsion system—A theoretical and experimental study. SAE Tech. Pap. 1979, 88, 1042–1056. [Google Scholar] [CrossRef]
- Hydraulic Launch Assist. 2013. Available online: https://www.eaton.com/SEAsia/ProductsSolutions/Hydraulics/ProductsServices/HydraulicLaunchAssist/index.htm (accessed on 1 October 2021).
- Tollefson, S.; Beachley, N.H.; Fronczak, F.J. Studies of an Accumulator Energy-Storage Automobile Design with a Single Pump/Motor Unit. SAE Trans. 1985. [Google Scholar] [CrossRef]
- Kepner, R.P. Hydraulic power assist—A demonstration of Hydraulic Hybrid Vehicle regenerative braking in a road vehicle application. SAE Tech. Pap. 2002, 111, 826–833. [Google Scholar] [CrossRef]
- Bozic, A. Introducing Hydraulic-Electric Synergy into Hybrid Transmission Using the Free-piston Engine Technology. In Proceedings of the Commercial Vehicle Engineering Congress and Exhibition and Powertrain & Fluid Systems Conference, Rosemont, IL, USA, 29 October–1 November 2007. [Google Scholar] [CrossRef]
- Breidi, F.; Garrity, J.; Lumkes, J. Design and Testing of Novel Hydraulic Pump/Motors to Improve the Efficiency of Agricultural Equipment. Trans. ASABE 2017, 60, 1809–1817. [Google Scholar] [CrossRef]
- El-Breidi, F. Investigation of digital pump/motor control strategies. Ph.D. Thesis, Purdue University, West Lafayette, IN, USA, 2016. [Google Scholar]
- Yang, H.-Y.; Pan, M. Engineering research in fluid power: A review. J. Zhejiang Univ. A 2015, 16, 427–442. [Google Scholar] [CrossRef] [Green Version]
- Merrill, K.J.; Breidi, F.Y.; Lumkes, J. Simulation based design and optimization of digital pump/motors. In Fluid Power Systems Technology; American Society of Mechanical Engineers: New York, NY, USA, 2013. [Google Scholar]
- Li, M.; Foss, R.; Stelson, K.A.; Van De Ven, J.D.; Barth, E.J. Design, Dynamic Modeling, and Experimental Validation of A Novel Alternating Flow Variable Displacement Hydraulic Pump. IEEE/ASME Trans. Mechatron. 2019, 24, 1294–1305. [Google Scholar] [CrossRef]
- Wilhelm, S.R.; Van De Ven, J.D. Synthesis of a Variable Displacement Linkage for a Hydraulic Transformer. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Washington, DC, USA, 28–31 August 2011. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.L.; Liu, S.A.; Jiang, J.H.; Shang, T.; Zhang, Y.K.; Wei, W. Dynamic analysis of energy storage unit of the hydraulic hybrid vehicle. Int. J. Automot. Technol. 2013, 14, 101–112. [Google Scholar] [CrossRef]
- Ivantysynova, M. Innovations in pump design-what are future directions? Proc. JFPS Int. Symp. Fluid Power 2008, 2008, 59–64. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Huang, S.; Du, J.; Wang, X.; Wang, S.; Zhang, H. A new dynamic seven-stage model for thickness prediction of the film between valve plate and cylinder block in axial piston pumps. Adv. Mech. Eng. 2016, 8. [Google Scholar] [CrossRef] [Green Version]
- Shang, L.; Ivantysynova, M. A temperature adaptive piston design for swash plate type axial piston machines. Int. J. Fluid Power 2016, 18, 38–48. [Google Scholar] [CrossRef]
- Rizzo, G.; Massarotti, G.; Bonanno, A.; Paoluzzi, R.; Raimondo, M.; Blosi, M.; Veronesi, F.; Caldarelli, A.; Guarini, G. Axial piston pumps slippers with nanocoated surfaces to reduce friction. Int. J. Fluid Power 2015, 16, 1–10. [Google Scholar] [CrossRef]
- Inaguma, Y.; Hibi, A. Reduction of friction torque in vane pump by smoothing cam ring surface. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2007, 221, 527–534. [Google Scholar] [CrossRef]
- Wieczorek, U.; Ivantysynova, M. Computer Aided Optimization of Bearing and Sealing Gaps in Hydrostatic Machines—The Simulation Tool Caspar. Int. J. Fluid Power 2002, 3, 7–20. [Google Scholar] [CrossRef]
- Sazonov, Y.A.; Mokhov, M.A.; Gryaznova, I.V.; Voronova, V.V.; Tumanyan, K.A.; Frankov, M.A.; Balaka, N.N. Development and Prototyping of Jet Systems for Advanced Turbomachinery with Mesh Rotor. Emerg. Sci. J. 2021, 5, 775–801. [Google Scholar] [CrossRef]
- Kostikov, Y.A.; Romanenkov, A.M. Approximation of the Multidimensional Optimal Control Problem for the Heat Equation (Applicable to Computational Fluid Dynamics (CFD)). Civ. Eng. J. 2020, 6, 743–768. [Google Scholar] [CrossRef]
- Manring, N.D. Valve-Plate Design for an Axial Piston Pump Operating at Low Displacements. J. Mech. Des. 2003, 125, 200–205. [Google Scholar] [CrossRef]
- Helmus, T.; Breidi, F.; Lumkes, J. Simulation of a variable displacement mechanically actuated digital pump unit. In Proceedings of the Eight Workshop on Digital Fluid Power, Tampere, Finland, 24–25 May 2016; pp. 95–106. [Google Scholar]
- Chehade, A.; Breidi, F.; Pate, K.S.; Lumkes, J. Data-driven Adaptive Thresholding Model for Real-time Valve Delay Estimation in Digital Pump/Motors. Int. J. Fluid Power 2019, 20, 271–294. [Google Scholar] [CrossRef]
- Winkler, B. Recent Advances in Digital Hydraulic Components and Applications. In Proceedings of the The Ninth Workshop on Digital Fluid Power, Aalborg, Denmark, 7–8 September 2017; Available online: https://www.et.aau.dk/digitalAssets/377/377525_id117-recent-advances-in-digital-hydraulic-components-and-applications.pdf (accessed on 1 December 2021).
- Brandstetter, R.; Deubel, T.; Scheidl, R.; Winkler, B.; Zeman, K. Digital hydraulics and “Industrie 4.0”. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2016, 231, 82–93. [Google Scholar] [CrossRef]
- Peng, S.; Branson Iii, D.T.; Guglielmino, E.; Boaventura, T.; Caldwell, D.G. Performance Assessment of Digital Hydraulics in a Quadruped Robot Leg. 2012. Available online: http://asmedigitalcollection.asme.org/ESDA/proceedings-pdf/ESDA2012/44861/227/4451304/227_1.pdf?casa_token=fWco0NtKGfUAAAAA:9c3YrOxP0rRp-PmWLcv8DUFtas4Qe6HnyCq02vGig-lSARq94FAcQnGOpL9W-XpcM-sdwGk (accessed on 5 November 2021).
- Pinto, L.P.G.; Belan, H.C.; Locateli, C.C.; Krus, P.; De Negri, V.J.; Lantto, B. New perspectives on digital hydraulics for aerospace applications. In Proceedings of the Aerospace Technology Congress, Solna, Stockholm, 11–12 October 2016. [Google Scholar]
- Breidi, F.; Helmus, T.; Lumkes, J. The impact of peak-and-hold and reverse current solenoid driving strategies on the dynamic performance of commercial cartridge valves in a digital pump/motor. Int. J. Fluid Power 2015, 17, 37–47. [Google Scholar] [CrossRef]
- Breidi, F.; Chehade, A.; Lumkes, J. Monitoring Digital Technologies in Hydraulic Systems Using CUSUM Control Charts. In Fluid Power Systems Technology; American Society of Mechanical Engineers: New York, NY, USA, 2019. [Google Scholar]
- Helmus, T. Investigation and Implementation of Mechanically Actuated Valves for Digital Hydraulic Units. Ph.D. Thesis, Purdue University, West Lafayette, IN, USA, 2017. [Google Scholar]
- Holland, M.A. Design of Digital Pump/Motors and Experimental Validation of Operating Strategies Doctor of Philosophy. 2012. Available online: http://www.purdue.edu/policies/pages/teach_res_outreach/c_22.html (accessed on 1 December 2021).
- Breidi, F.; Garrity, J.; Lumkes, J., Jr. Investigation of a real-time pressure based valve timing correction algorithm. In Fluid Power Systems Technology; American Society of Mechanical Engineers: New York, NY, USA, 2017. [Google Scholar]
- Simscape—MATLAB & Simulink. 2021. Available online: https://www.mathworks.com/products/simscape.html (accessed on 6 October 2021).
- Sizing Tool—Reasontek Corp. 2021. Available online: https://www.reasontek.com/sizing-tool/ (accessed on 23 November 2021).
- Cheema, J. Air and Oil Do Mix: Selecting the Right Accumulator Is Critical for Wind Farm Applications. Hydraulics and Pneumatic. 2013. Available online: http://ezproxy.derby.ac.uk/login?url=http://search.ebscohost.com/login.aspx?direct=true&db=edsbl&AN=RN332050940&site=eds-live (accessed on 28 November 2021).
- Xu, Z.; Li, W.; Liu, X.; Chen, Z. Dynamic characteristics of coupling model of valve-controlled cylinder parallel accumulator. Mech. Ind. 2019, 20, 306. [Google Scholar] [CrossRef]
- Valeski, B. Average Tire Weight (With 10 Examples)—Survival Tech Shop. 2021. Available online: https://www.survivaltechshop.com/tire-weight/ (accessed on 1 December 2021).





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Azzam, I.; Pate, K.; Garcia-Bravo, J.; Breidi, F. Energy Savings in Hydraulic Hybrid Transmissions through Digital Hydraulics Technology. Energies 2022, 15, 1348. https://doi.org/10.3390/en15041348
Azzam I, Pate K, Garcia-Bravo J, Breidi F. Energy Savings in Hydraulic Hybrid Transmissions through Digital Hydraulics Technology. Energies. 2022; 15(4):1348. https://doi.org/10.3390/en15041348
Chicago/Turabian StyleAzzam, Israa, Keith Pate, Jose Garcia-Bravo, and Farid Breidi. 2022. "Energy Savings in Hydraulic Hybrid Transmissions through Digital Hydraulics Technology" Energies 15, no. 4: 1348. https://doi.org/10.3390/en15041348
APA StyleAzzam, I., Pate, K., Garcia-Bravo, J., & Breidi, F. (2022). Energy Savings in Hydraulic Hybrid Transmissions through Digital Hydraulics Technology. Energies, 15(4), 1348. https://doi.org/10.3390/en15041348