
A Fuzzy Logic-Based Emulated Inertia Control to a Supercapacitor System to Improve Inertia in a Low Inertia Grid with Renewables


Abstract
:1. Introduction
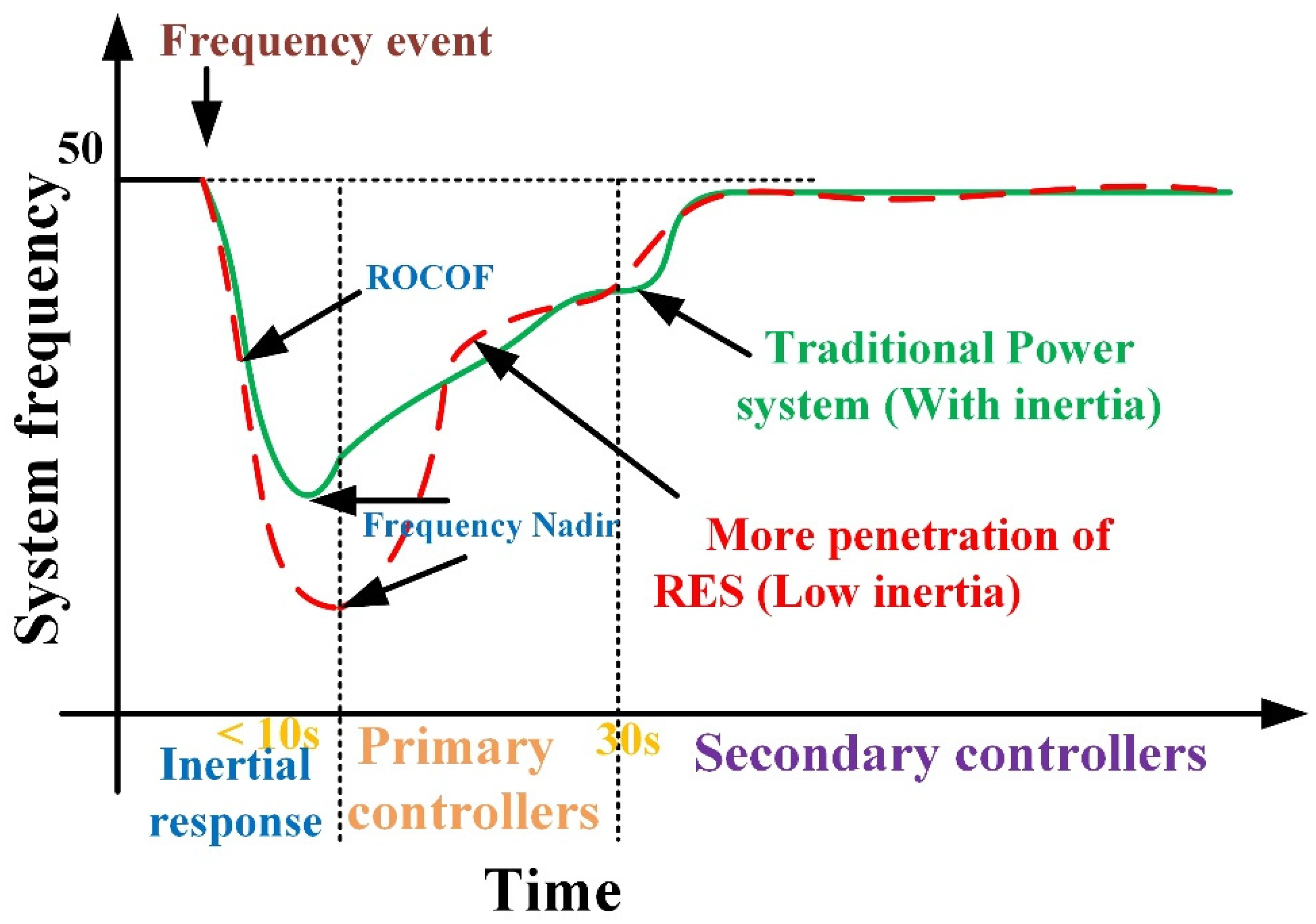
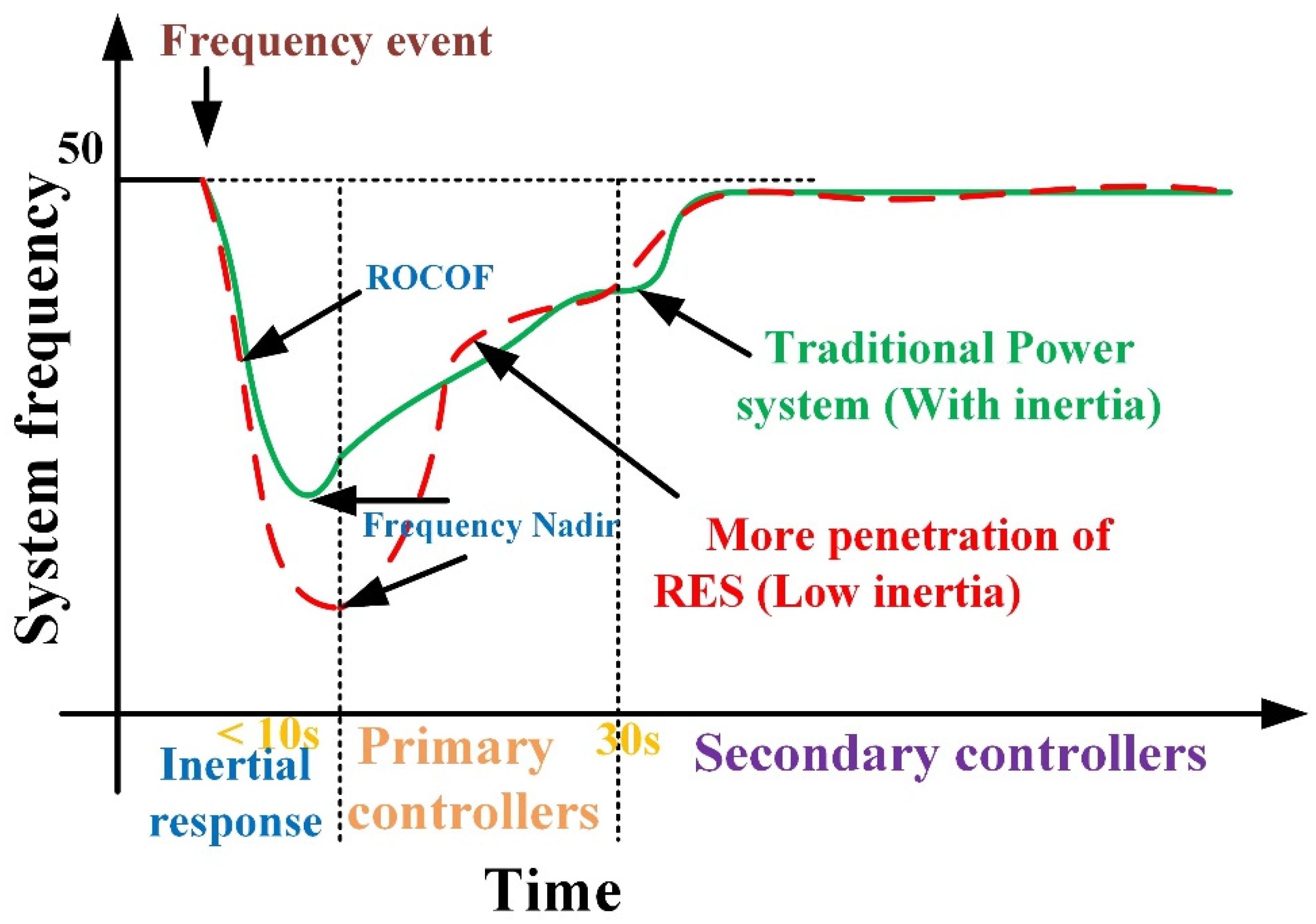
- Initially, an underlying behavior called inertial frequency response derives energy from the spinning masses to oppose the frequency deviation from nominal frequency.
- In the next step, governor systems are triggered to hold the frequency variance at an appropriate level (primary control).
- Finally, a secondary control system is carried out to restore the frequency to its nominal value.
- The inertia emulator is formed based on SC.
- The emulated inertia control technique is designed based on a fuzzy logic control system.
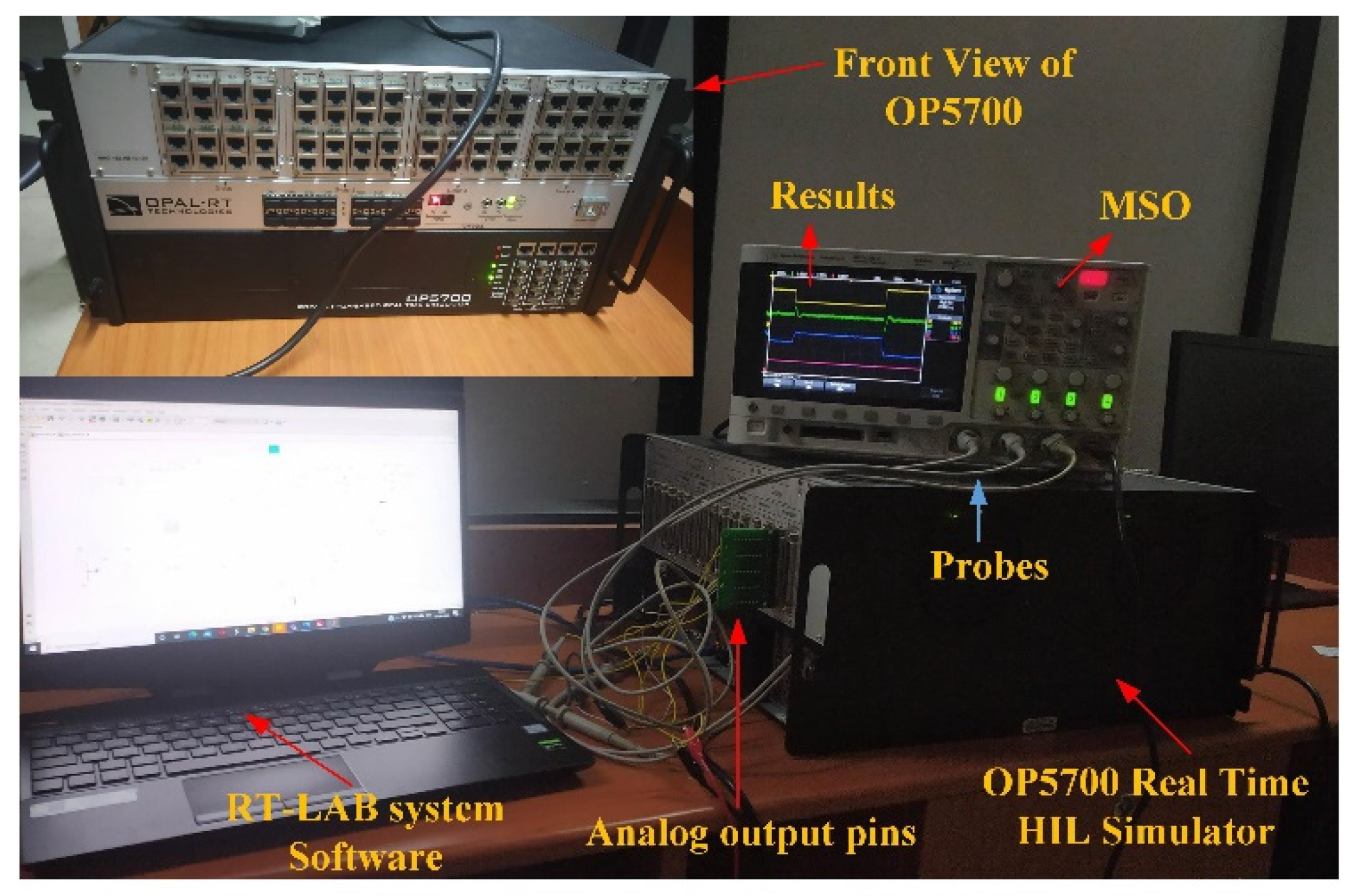
- To validate the proposed system in real-time simulations with OPAL RT-based real-time simulators are presented.
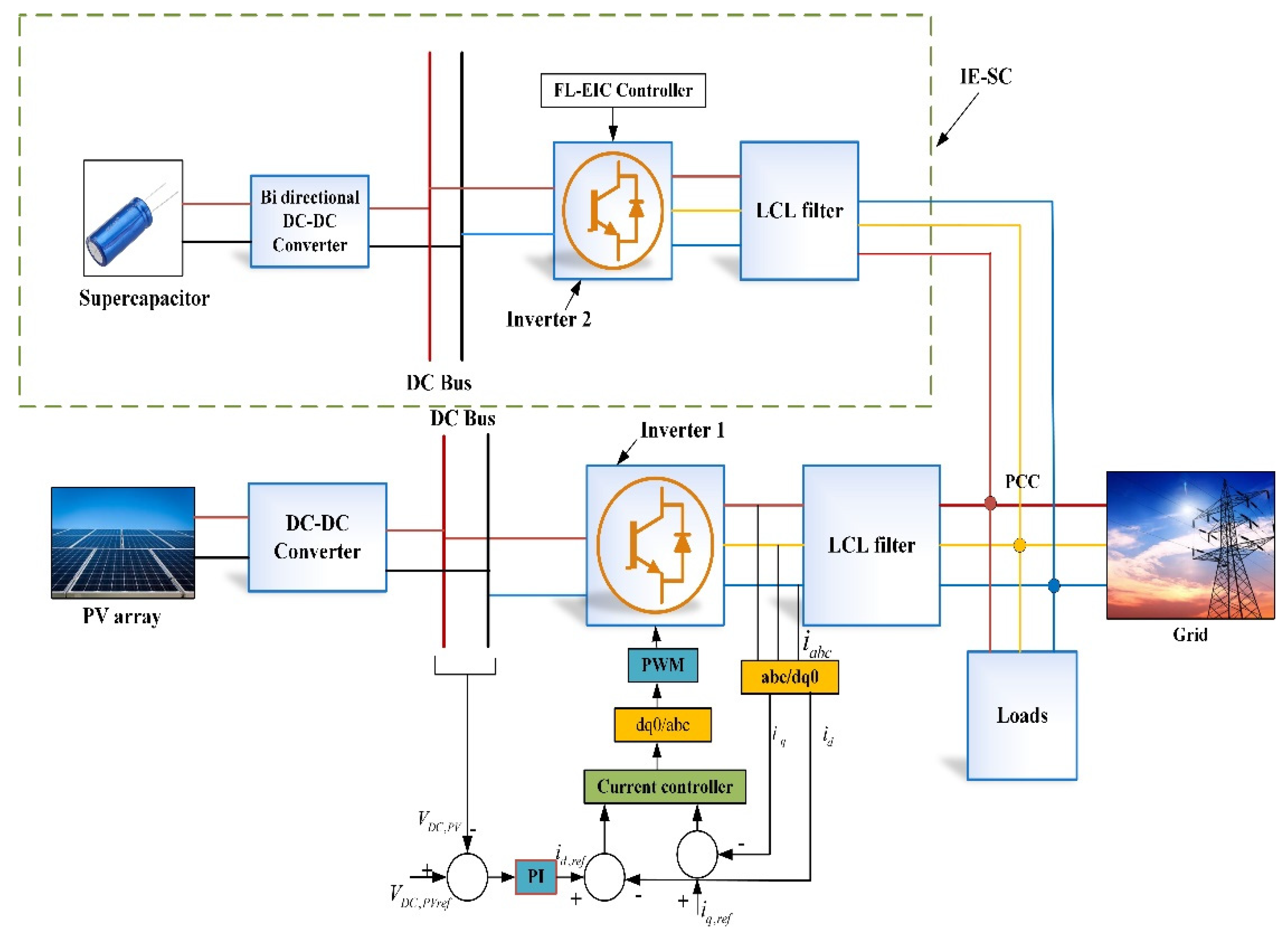
2. System Configuration
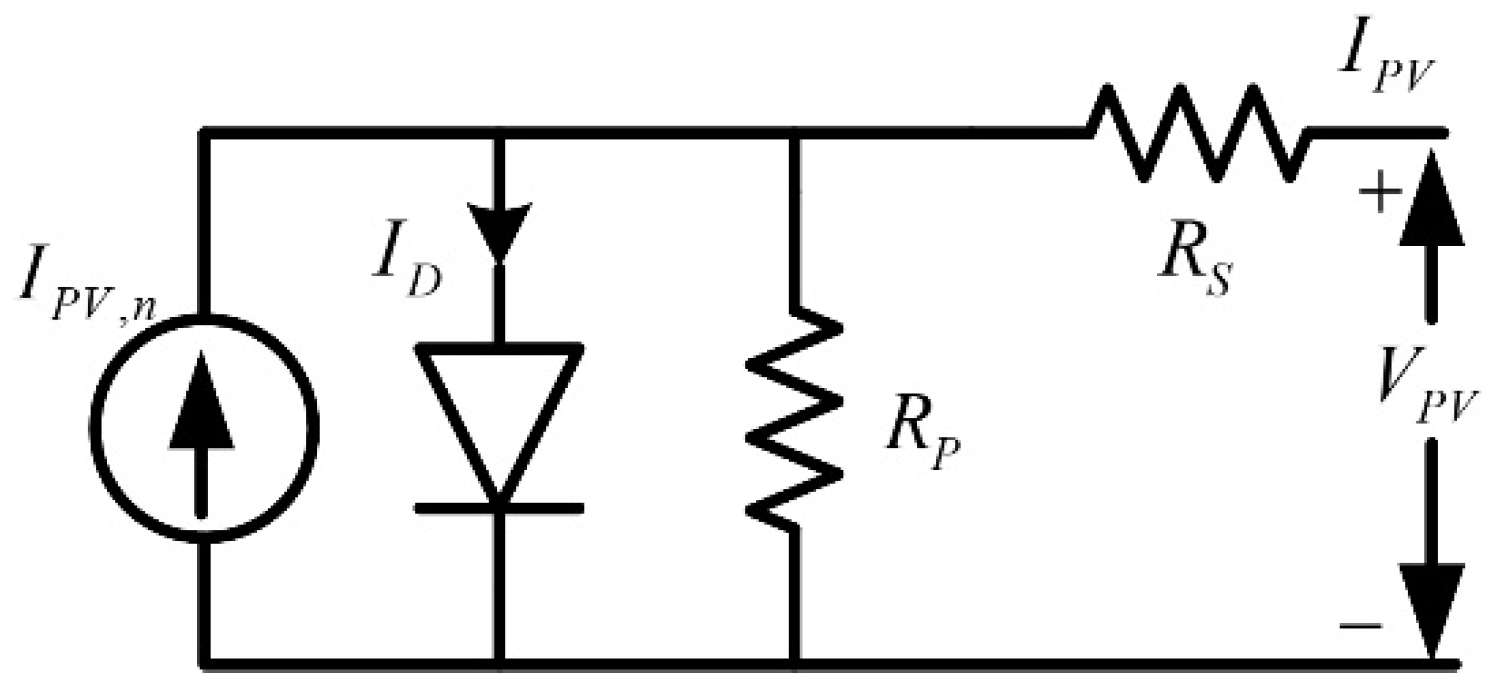
2.1. Modelling of PV System
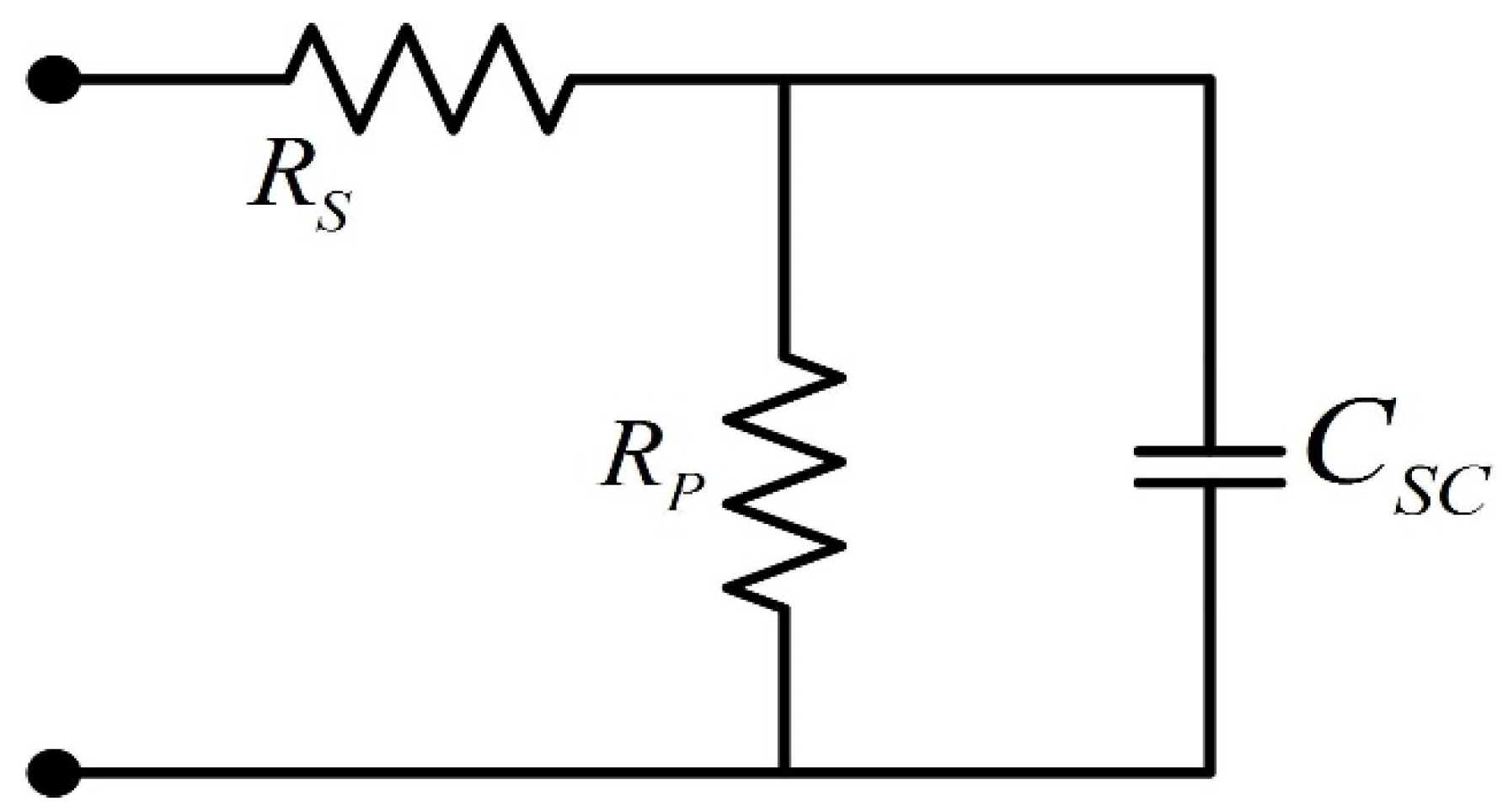
2.2. Supercapacitor in Inertia Emulation
Selection of Supercapacitor
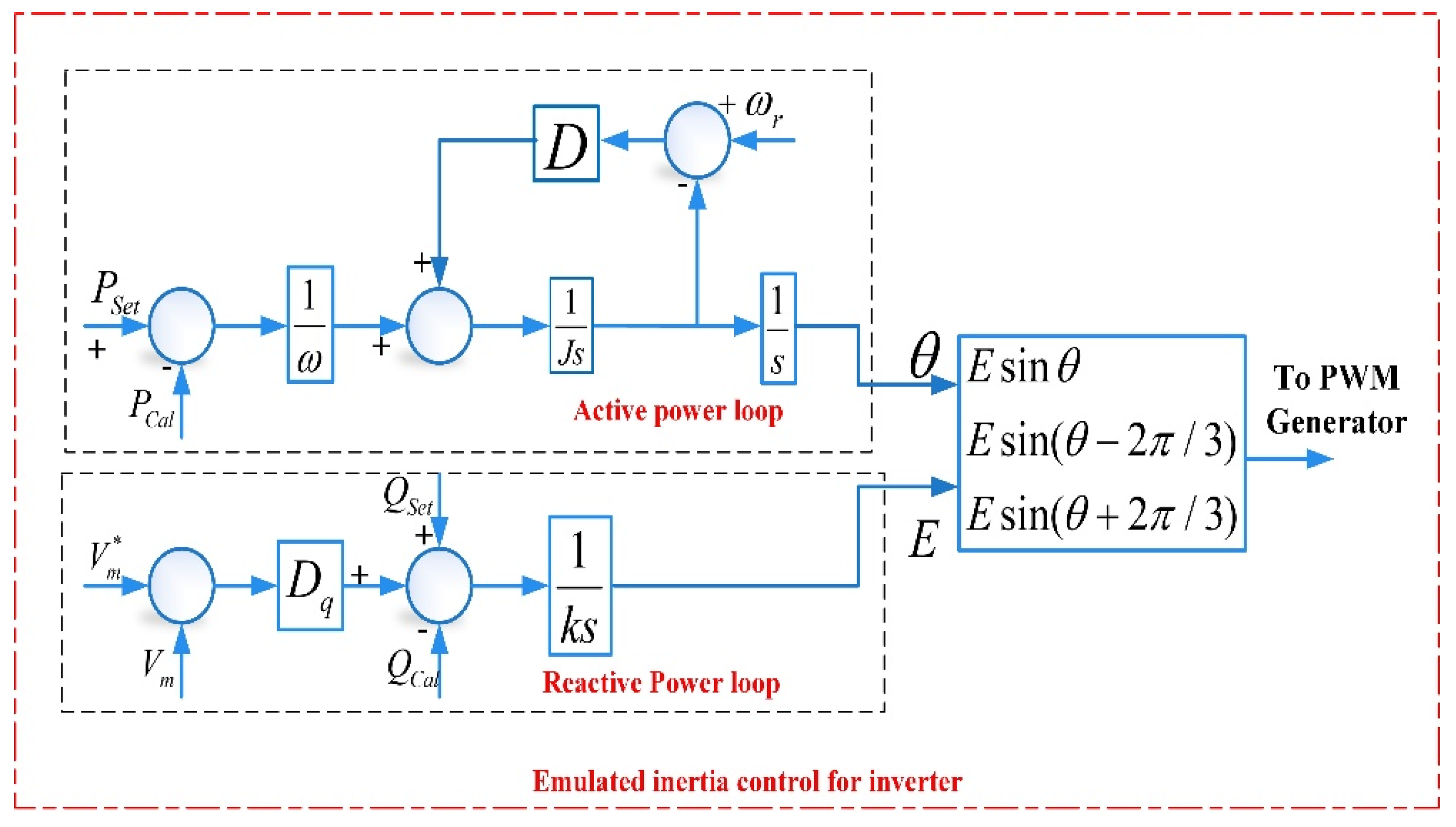
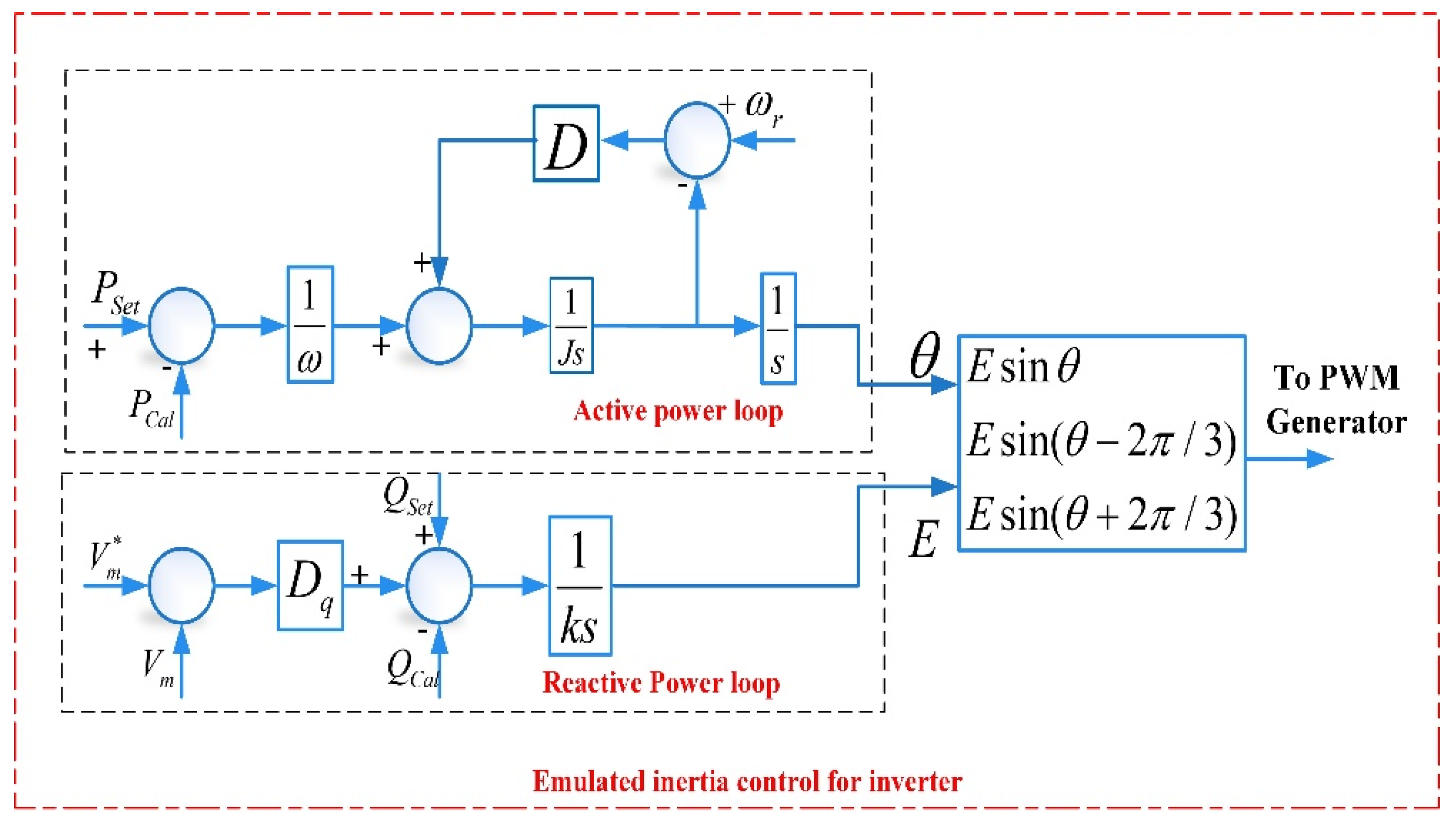
3. Conventional Inertia Emulation Control
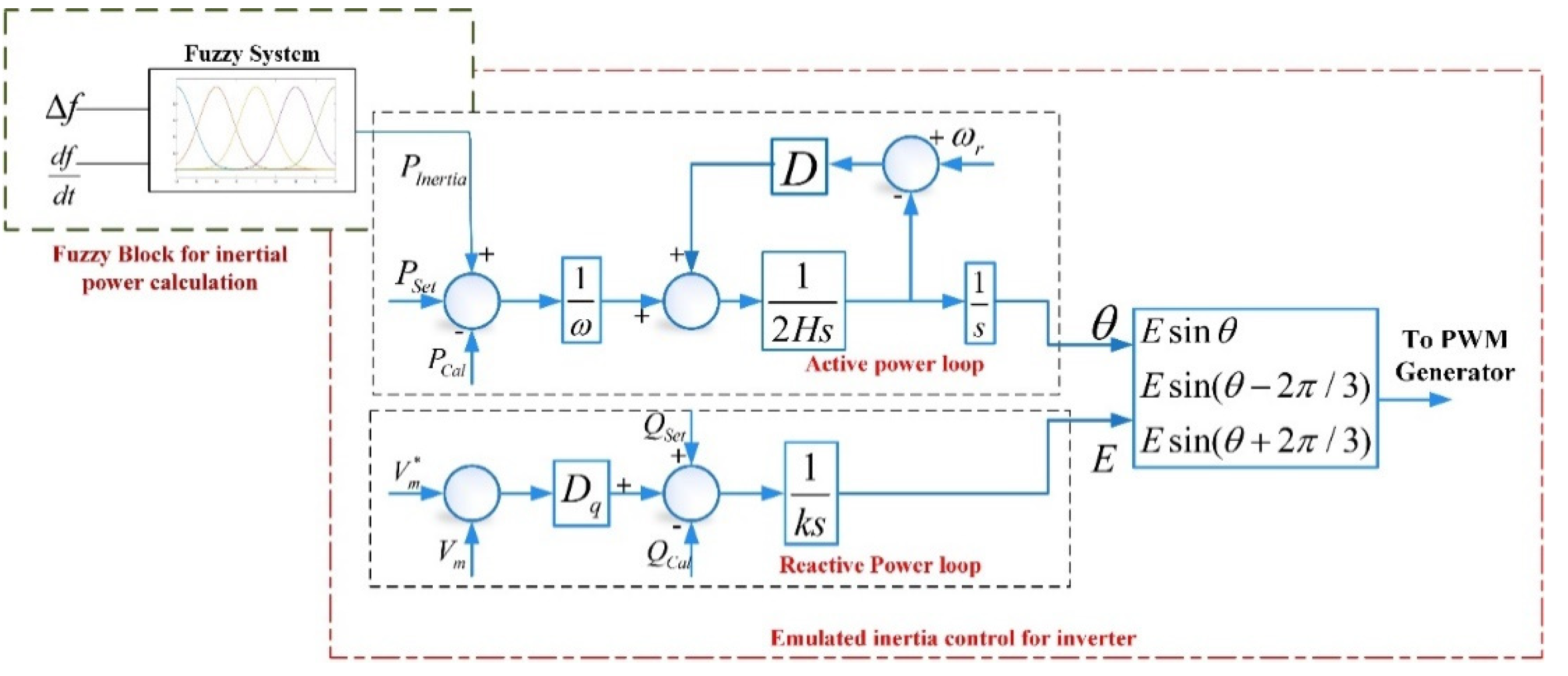
4. Fuzzy Controller for Inertia Enhancement
4.1. Fuzzy Logic Control
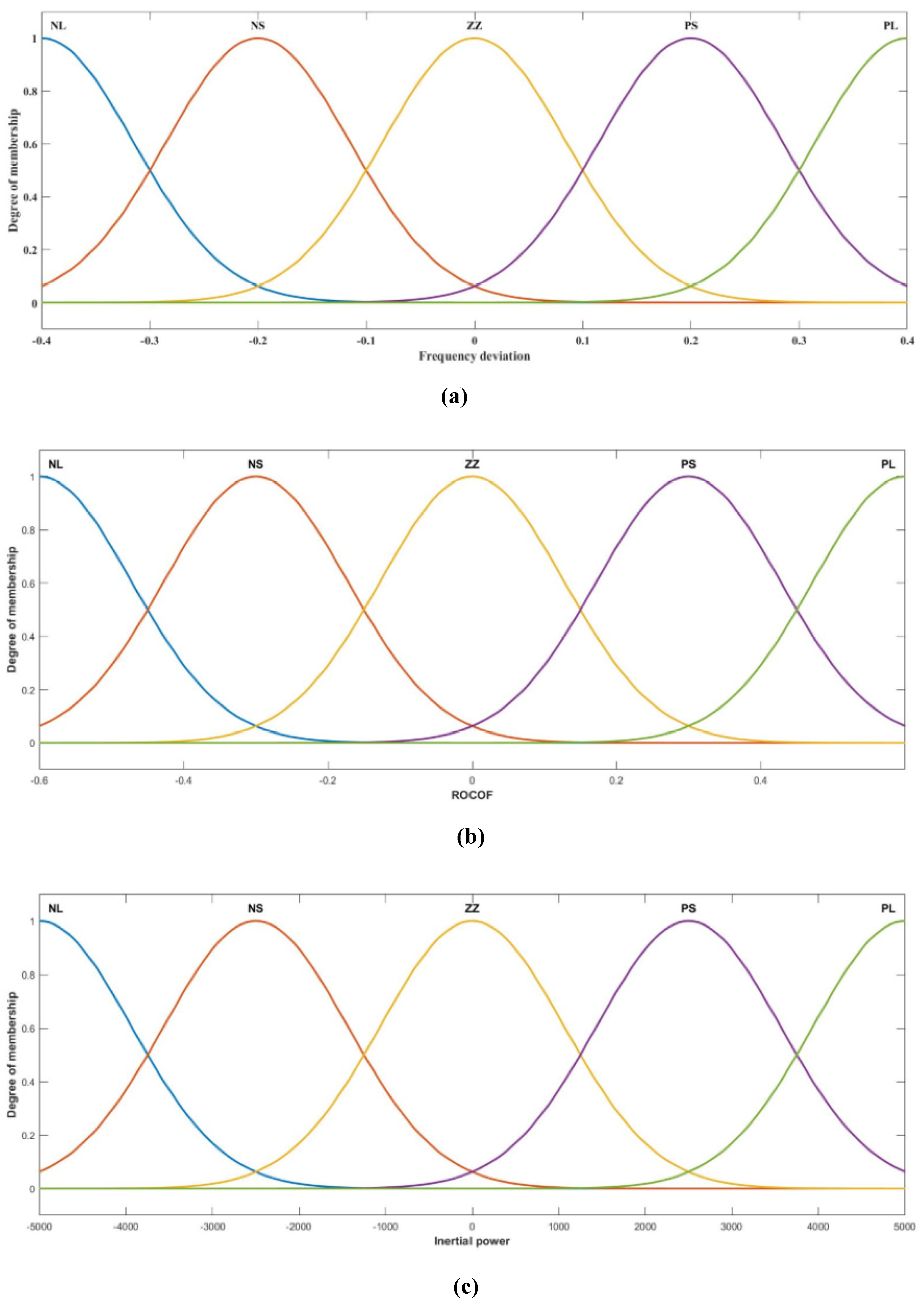
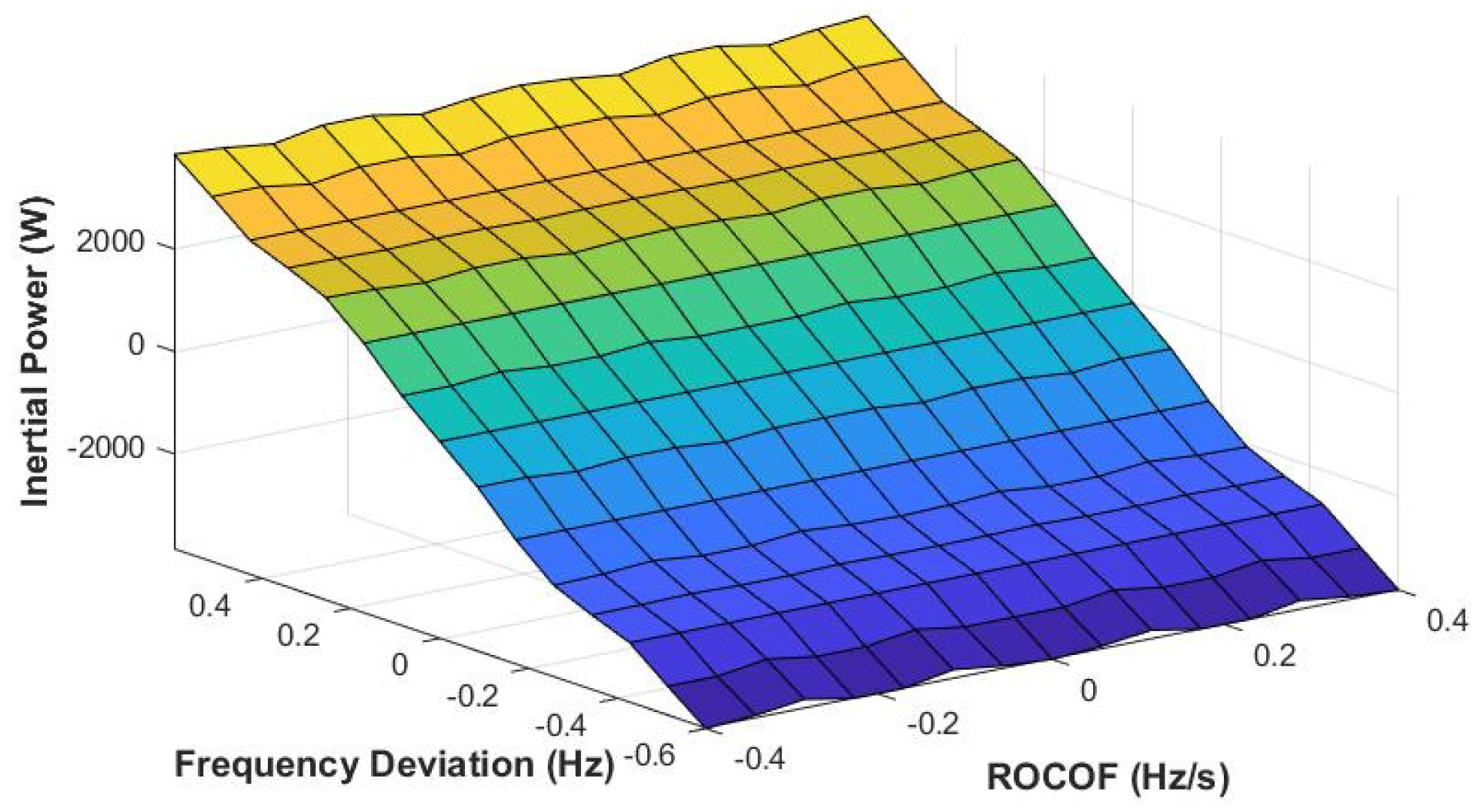
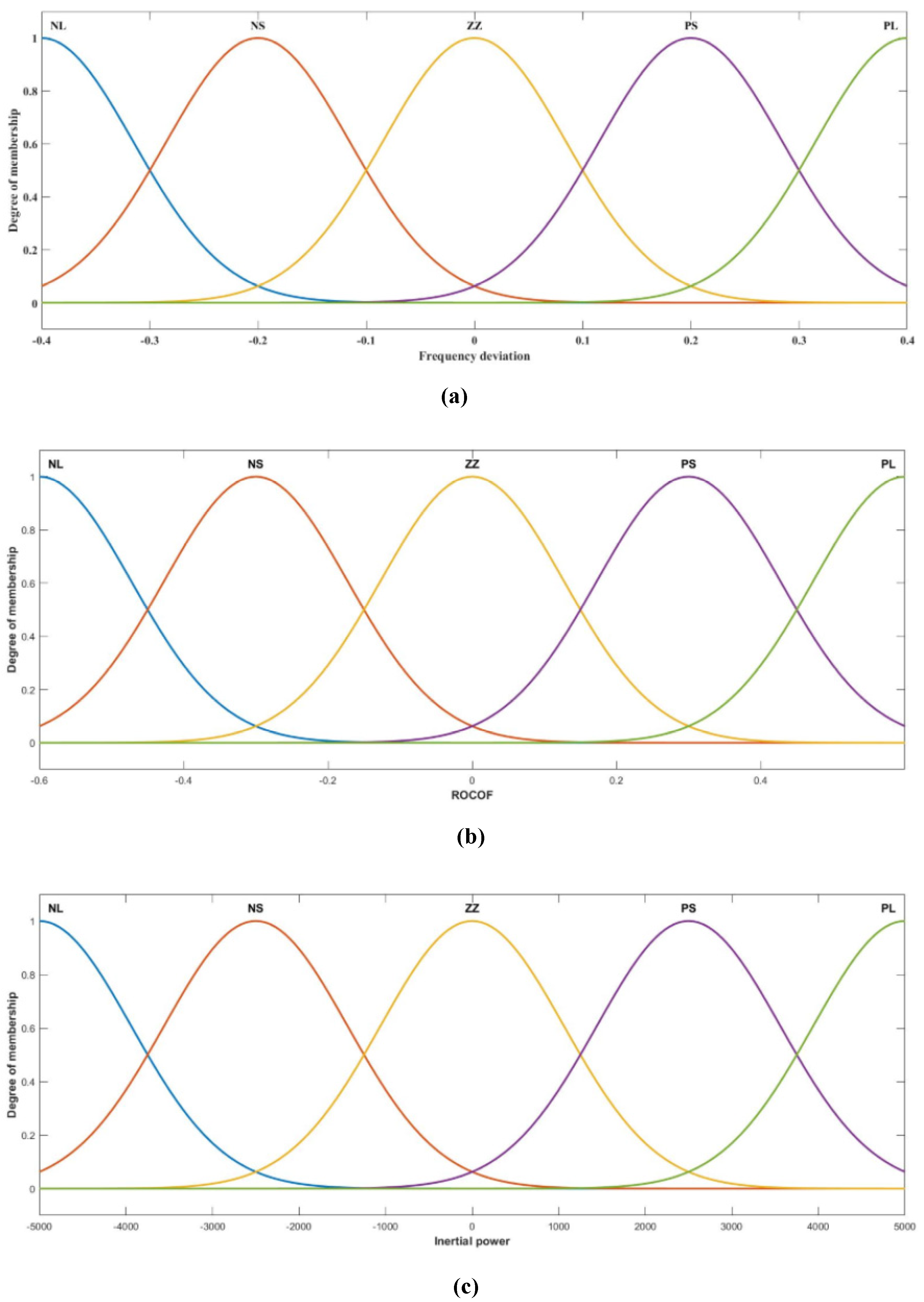
4.2. Fuzzy Inputs and Outputs
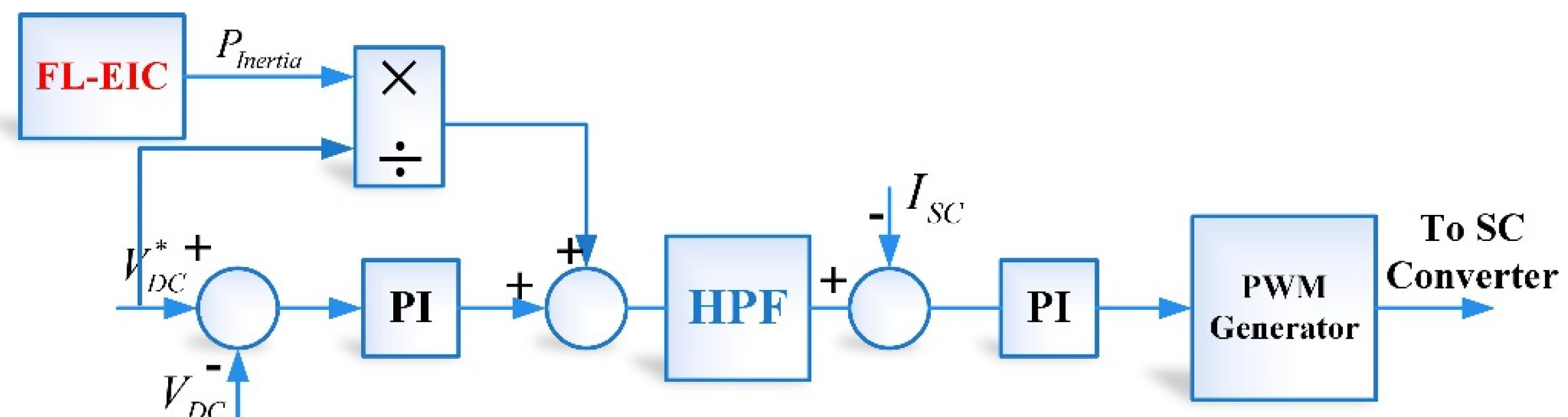
4.3. FL-EIC for Inertia Enhancement
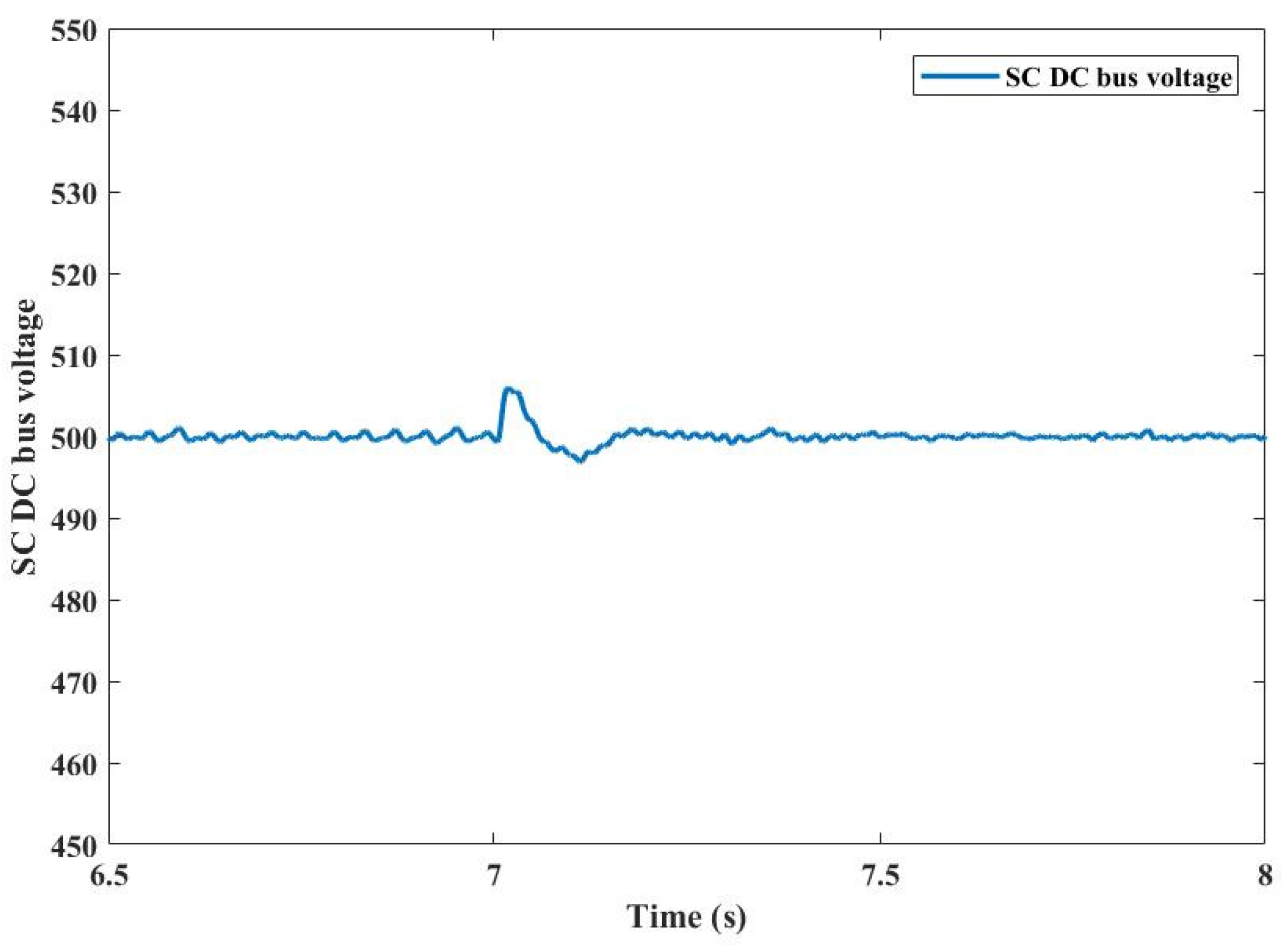
4.4. DC Voltage Controller at SC Bi-Directional Converter
5. Simulation Results
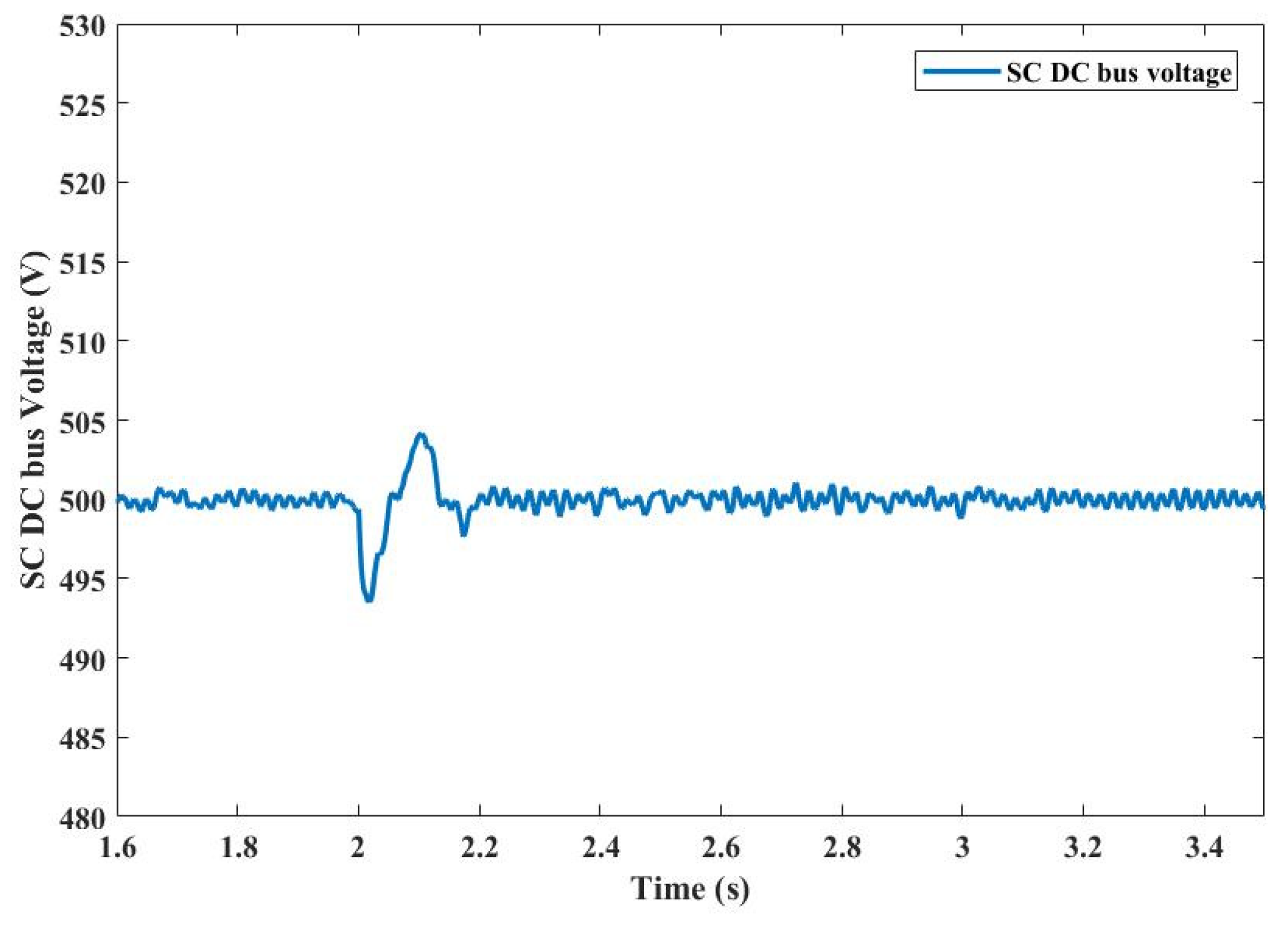
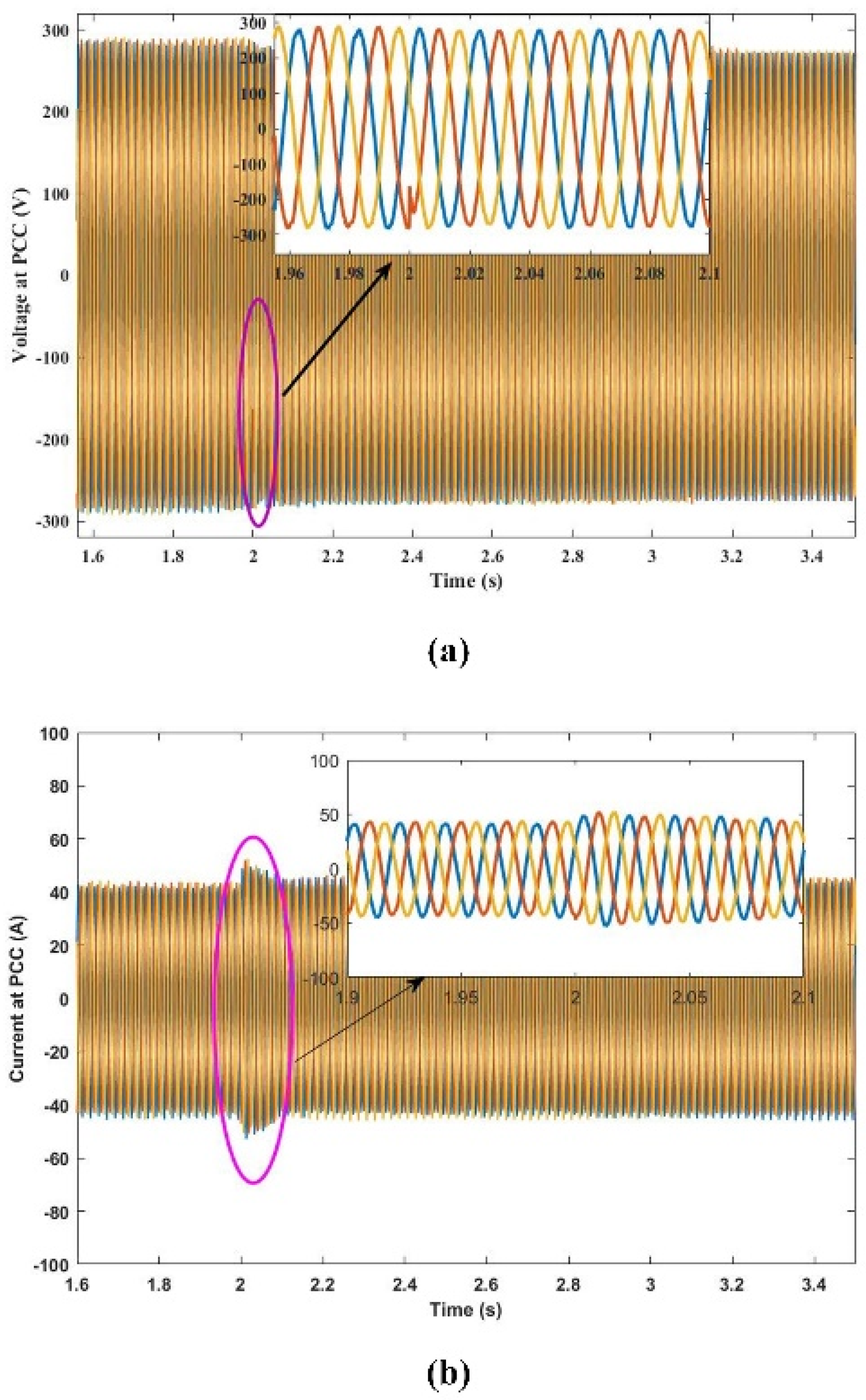
5.1. Frequency Output Analysis under Sudden Load Change
- Case 0: System without inertia control
- Case 1: System with conventional EIC as per the reference [36].
- Case 2: System with IE–SC system based on FL-EIC.
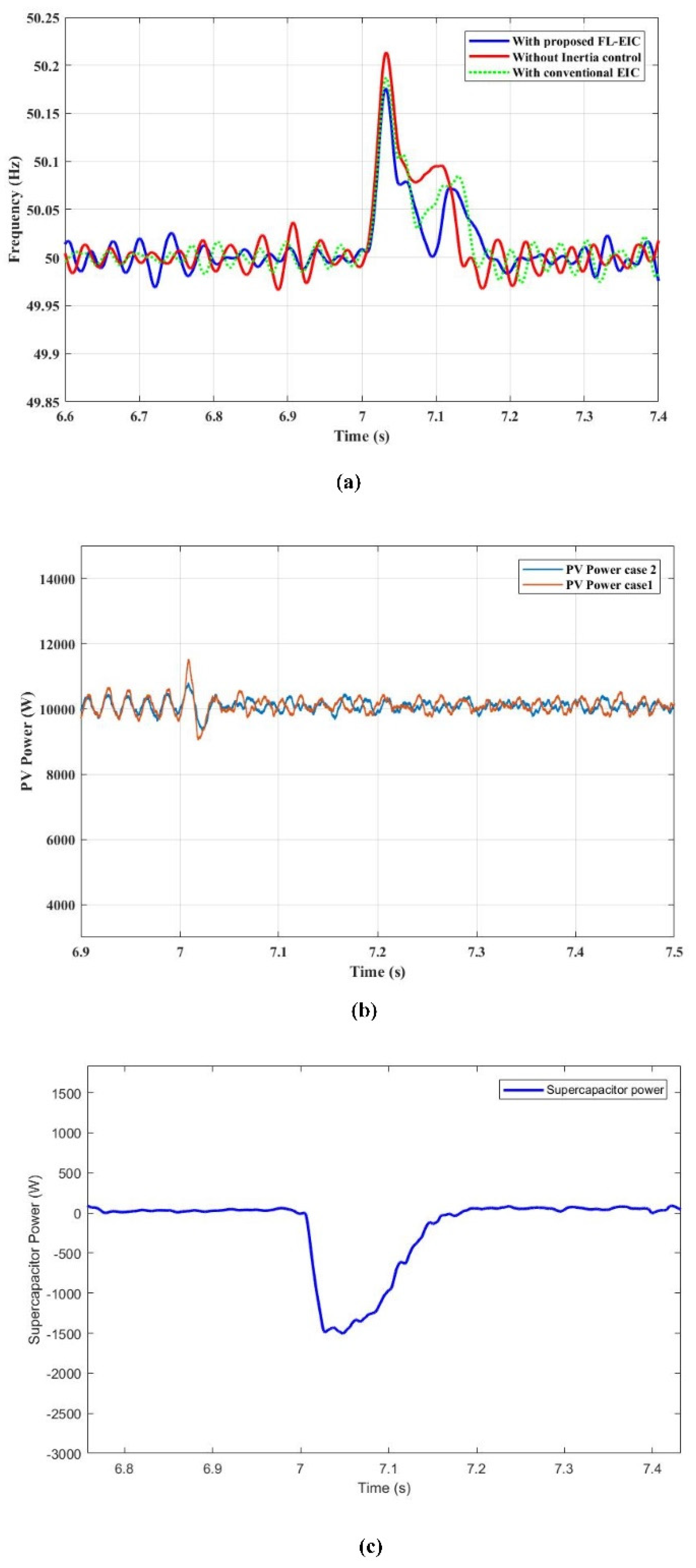
5.2. Inertia Responses for PV Irradiation Variations
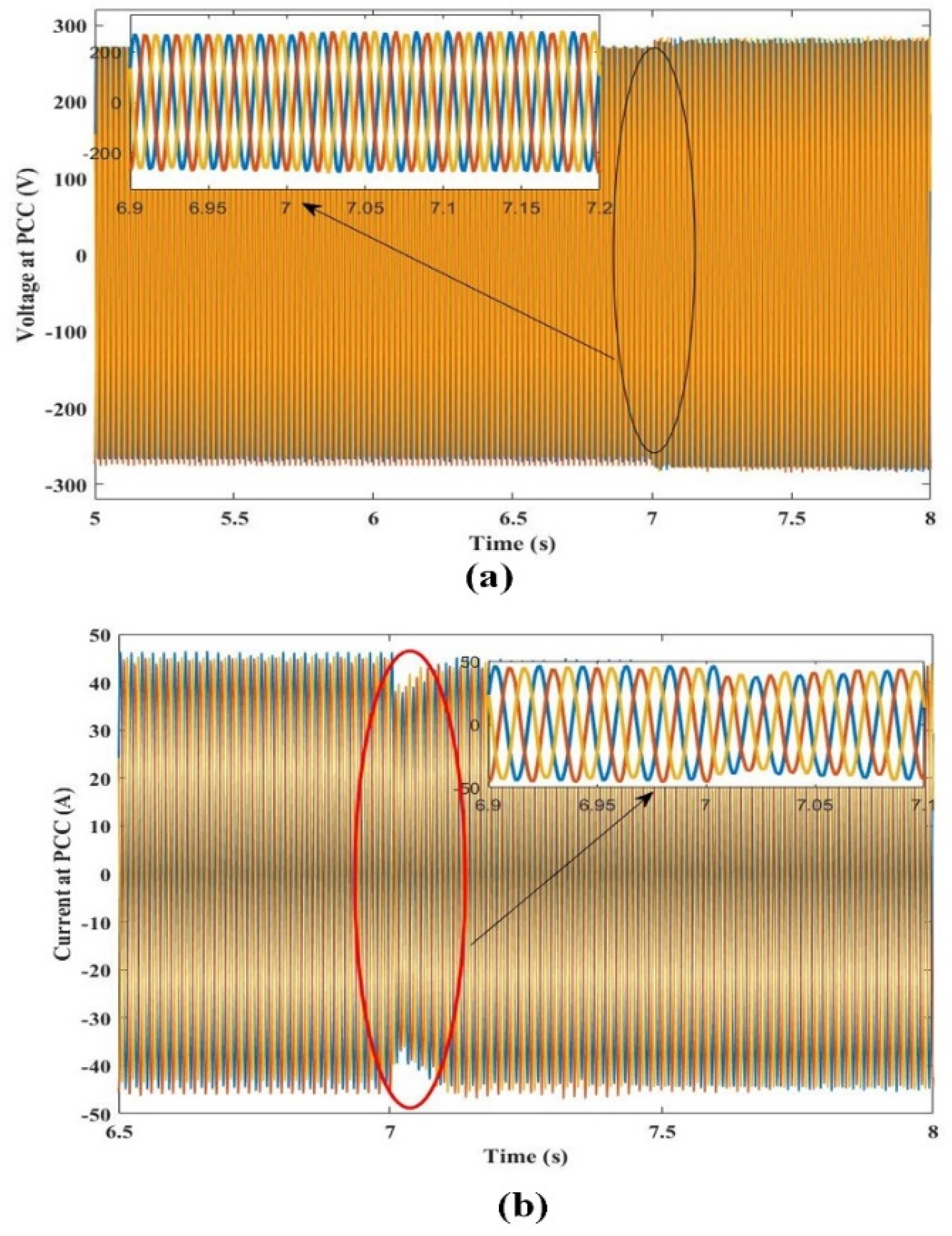
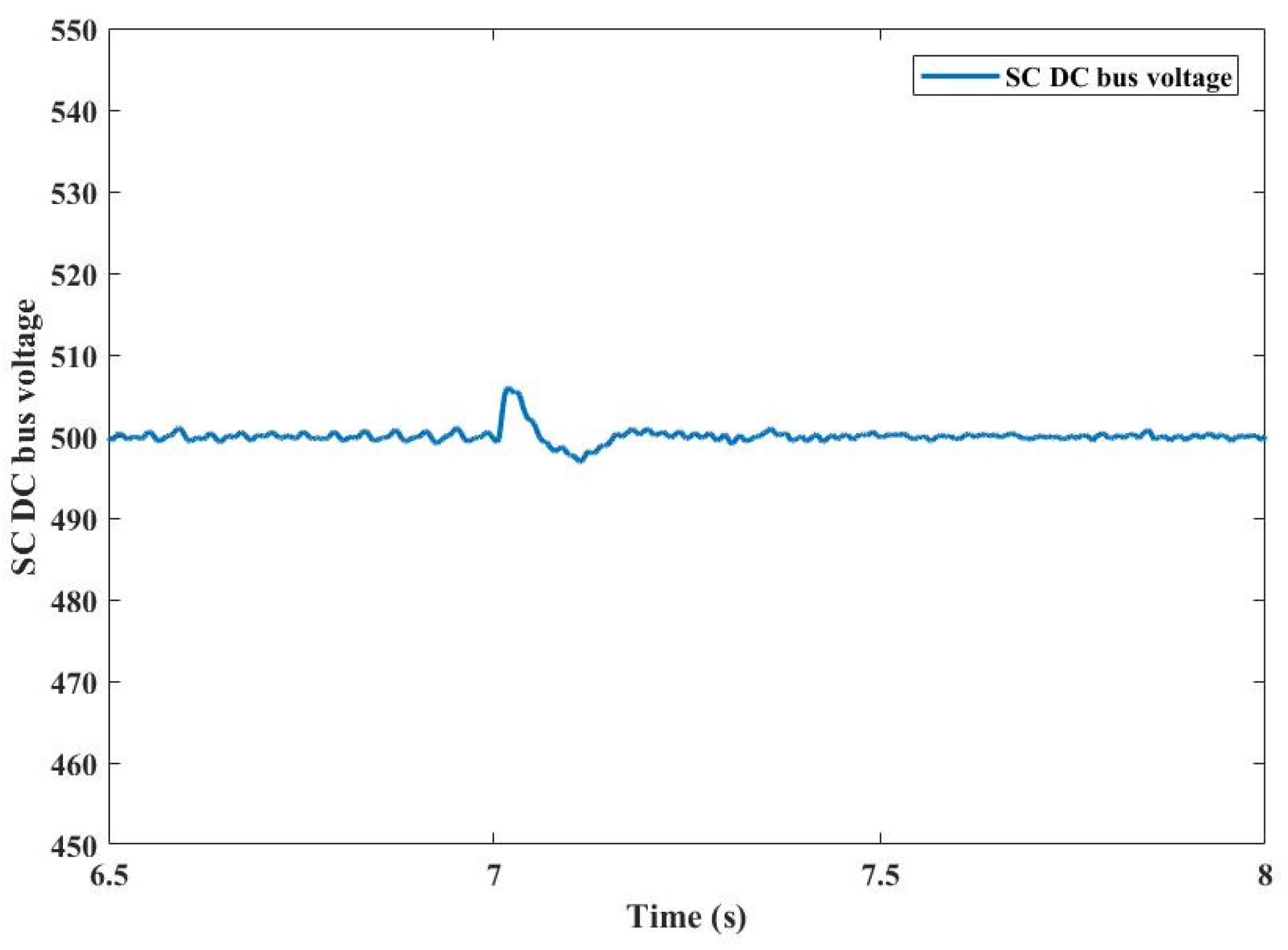
6. HIL Results
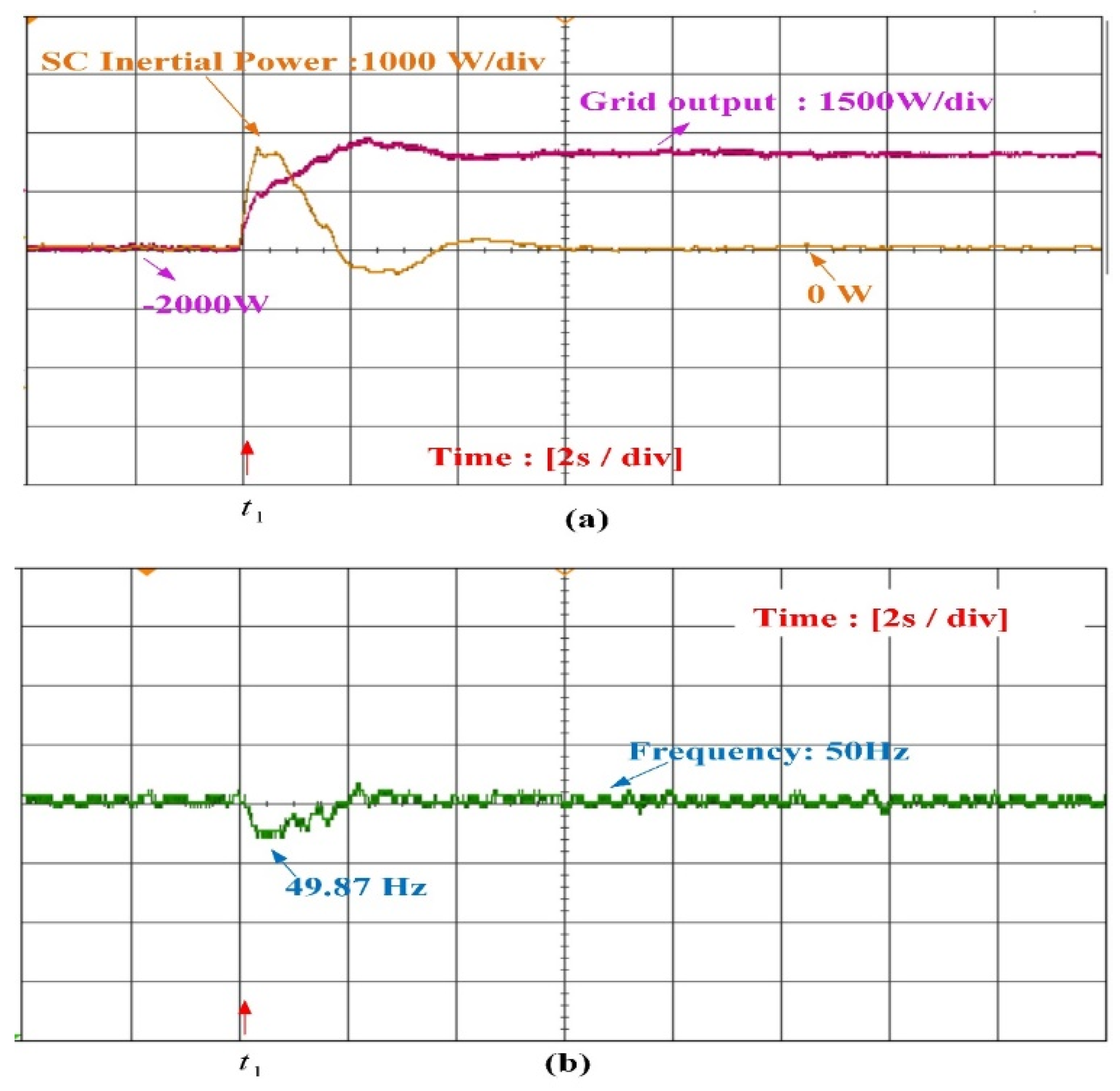
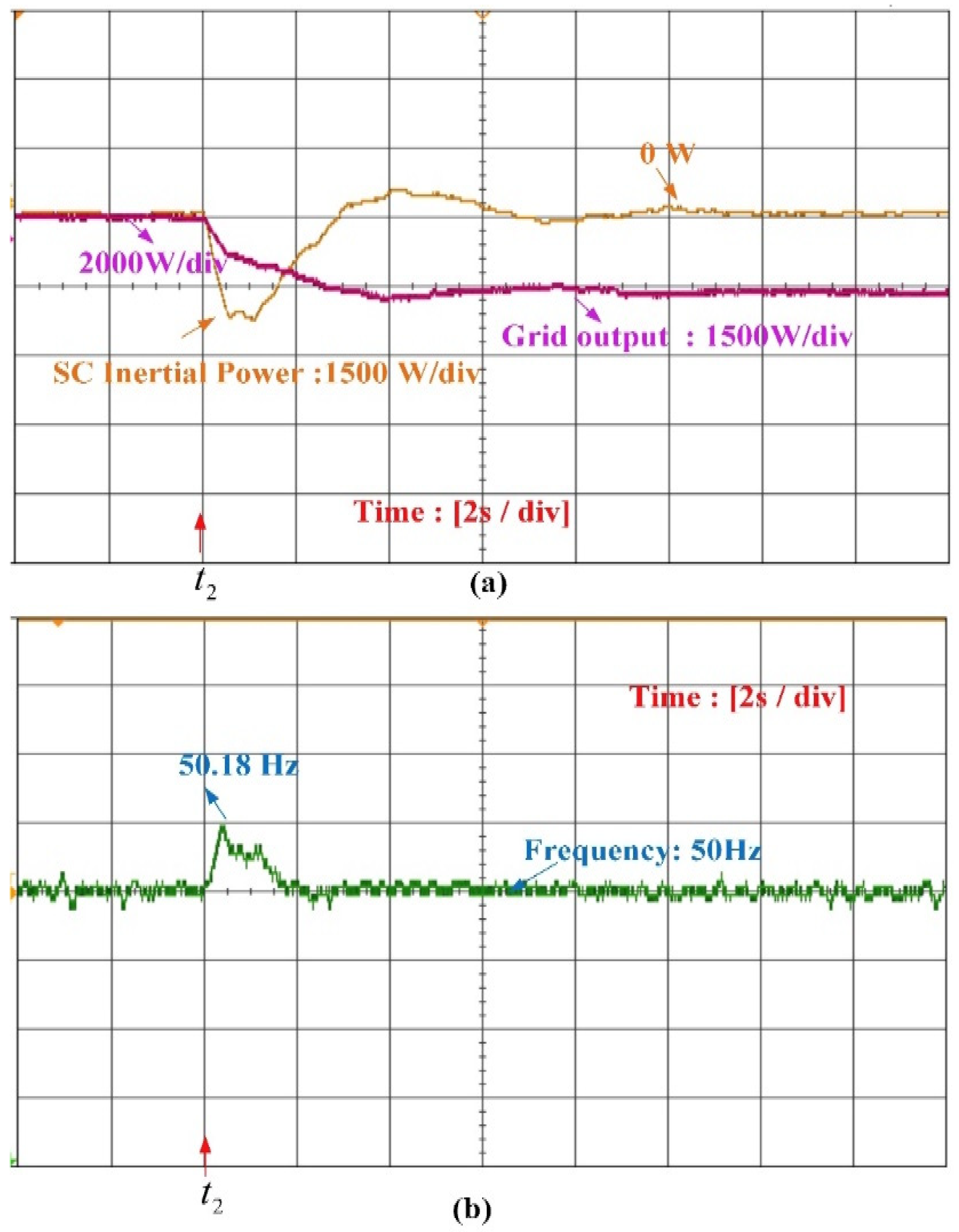
6.1. Step Change in Load
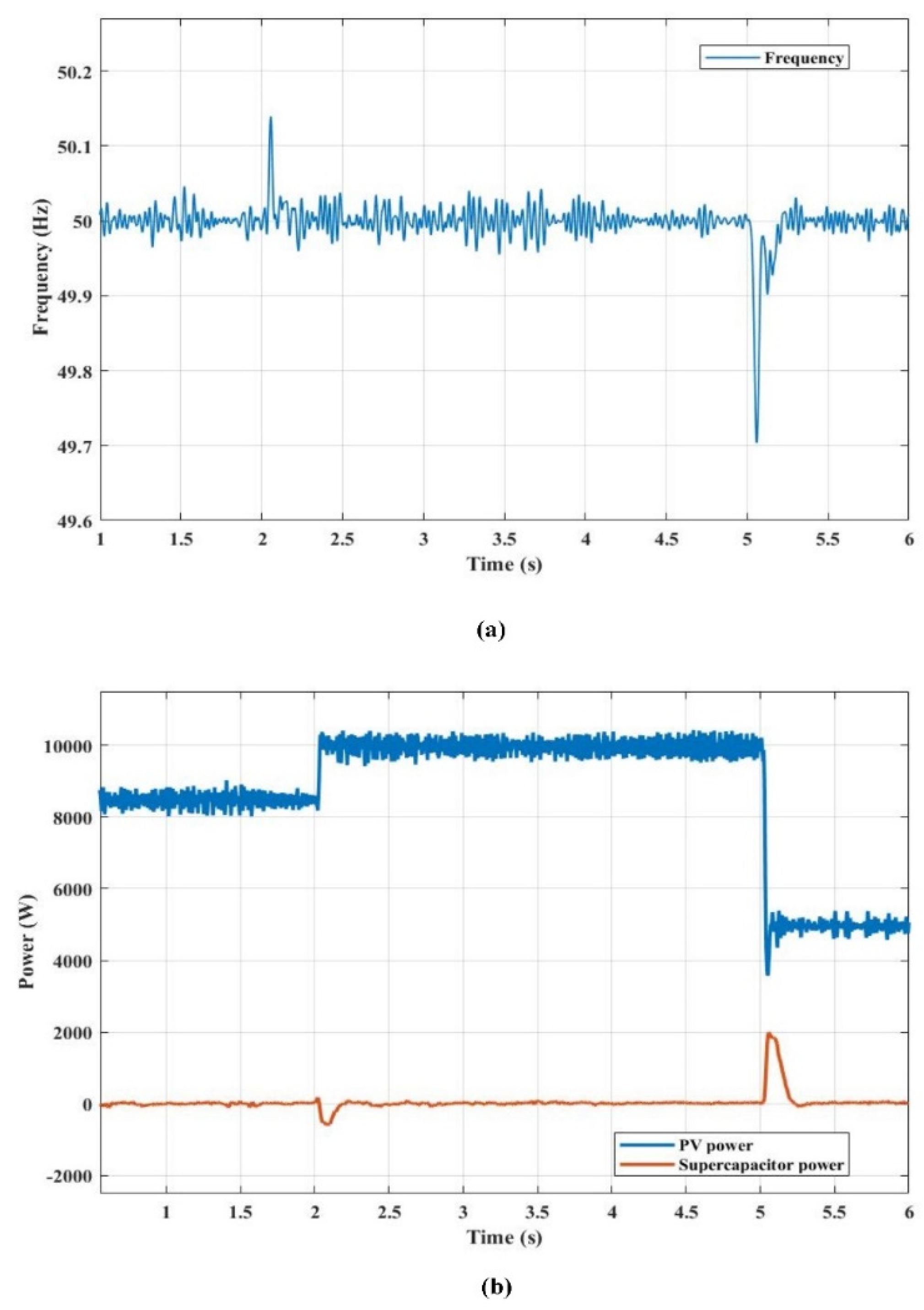
6.2. Step Change in PV Irradiation
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zervos, A. Renewables 2018 Global Status Report; Ren21: Paris, France, 2018. [Google Scholar]
- Tamrakar, U.; Shrestha, D.; Maharjan, M.; Bhattarai, B.P.; Hansen, T.M.; Tonkoski, R. Virtual Inertia: Current Trends and Future Directions. Appl. Sci. 2017, 7, 654. [Google Scholar] [CrossRef]
- Zhong, Q.-C.; Weiss, G. Synchronverters: Inverters That Mimic Synchronous Generators. IEEE Trans. Ind. Electron. 2011, 58, 1259–1267. [Google Scholar] [CrossRef]
- Ratnam, K.; Palanisamy, K.; Yang, G. Future low-inertia power systems: Requirements, issues, and solutions—A review. Renew. Sustain. Energy Rev. 2020, 124, 109773. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Yang, G.; Nielsen, A.H.; Jensen, P.H. Frequency stability enhancement for low inertia systems using synthetic inertia of wind power. In Proceedings of the 2017 IEEE Power & Energy Society General Meeting, Chicago, IL, USA, 16–20 July 2017; pp. 1–5. [Google Scholar]
- Sarojini, R.K.; Palanisamy, K. Emulated Inertia Control for the Stand-Alone Microgrid with High Penetration of Renewable Energy Sources. Int. J. Renew. Energy Res. 2020, 10, 831–842. [Google Scholar]
- Bose, U.; Chattopadhyay, S.K.; Chakraborty, C.; Pal, B. A Novel Method of Frequency Regulation in Microgrid. IEEE Trans. Ind. Appl. 2019, 55, 111–121. [Google Scholar] [CrossRef]
- Ashabani, M.; Freijedo, F.D.; Golestan, S.; Guerrero, J. Inducverters: PLL-Less Converters With Auto-Synchronization and Emulated Inertia Capability. IEEE Trans. Smart Grid 2016, 7, 1660–1674. [Google Scholar] [CrossRef]
- Xiong, L.; Zhuo, F.; Wang, F.; Liu, X.; Chen, Y.; Zhu, M.; Yi, H. Static Synchronous Generator Model: A New Perspective to Investigate Dynamic Characteristics and Stability Issues of Grid-Tied PWM Inverter. IEEE Trans. Power Electron. 2016, 31, 6264–6280. [Google Scholar] [CrossRef]
- Peng, Q.; Fang, J.; Yang, Y.; Liu, T.; Blaabjerg, F. Maximum Virtual Inertia from DC-Link Ca-pacitors Considering System Stability at Voltage Control Timescale. IEEE J. Emerg. Sel. Top. Circuits Syst. 2021, 11, 79–89. [Google Scholar] [CrossRef]
- Fang, J.; Li, H.; Tang, Y.; Blaabjerg, F. Distributed Power System Virtual Inertia Implemented by Grid-Connected Power Converters. IEEE Trans. Power Electron. 2018, 33, 8488–8499. [Google Scholar] [CrossRef] [Green Version]
- Dreidy, M.; Mokhlis, H.; Mekhilef, S. Inertia response and frequency control techniques for renewable energy sources: A review. Renew. Sustain. Energy Rev. 2017, 69, 144–155. [Google Scholar] [CrossRef]
- Su, Y.; Li, H.; Cui, Y.; You, S.; Ma, Y.; Wang, J.; Liu, Y. An Adaptive PV Frequency Control Strategy Based on Real-Time Inertia Estimation. IEEE Trans. Smart Grid 2021, 12, 2355–2364. [Google Scholar] [CrossRef]
- Subramaniam, U.; Vavilapalli, S.; Padmanaban, S.; Blaabjerg, F.; Holm-Nielsen, J.B.; Almakhles, D. A Hybrid PV-Battery System for ON-Grid and OFF-Grid Applications—Controller-In-Loop Simulation Validation. Energies 2020, 13, 755. [Google Scholar] [CrossRef] [Green Version]
- Delille, G.; François, B.; Malarange, G. Dynamic frequency control support by energy storage to reduce the impact of wind and solar genera- tion on isolated power system’s inertia. IEEE Trans. Sustain. Energy 2012, 3, 931–939. [Google Scholar] [CrossRef]
- Rakhshani, E.; Rodriguez, P. Inertia Emulation in AC/DC Interconnected Power Systems using Derivative Tech-nique considering Frequency Measurement Effects. IEEE Trans. Power Syst. 2017, 32, 3338–3351. [Google Scholar] [CrossRef]
- Sarojini, R.K.; Palanisamy, K.; Sanjeevikumar, P.; Nielsen, J.B.H. Inertia emulation control technique based fre- quency control of grid-connected single-phase rooftop photovoltaic system with battery and supercapacitor. IET Renew. Power Gener. 2020, 14, 1156–1163. [Google Scholar] [CrossRef]
- Fang, J.; Tang, Y.; Li, H.; Li, X. A Bat- tery/Ultracapacitor Hybrid Energy Storage System for Im-plementing the Power Management of Virtual Synchronous Generators. IEEE Trans. Power Electron. 2018, 33, 2820–2824. [Google Scholar] [CrossRef]
- Sharma, S.; Varshney, L.; Elavarasan, R.M.; Vardhan, A.S.S.; Vardhan, A.S.S.; Saket, R.K.; Subramaniam, U.; Hossain, E. Performance Enhance- ment of PV System Configurations under Partial Shading Conditions Using MS Method. IEEE Access 2021, 9, 56630–56644. [Google Scholar] [CrossRef]
- Gonzalez-Longatt, F.M.; Alhejaj, S. Enabling inertial response in utility-scale battery energy storage system. In Proceedings of the 2016 IEEE Innovative Smart Grid Technologies—Asia (ISGT-Asia), Melbourne, VIC, Australia, 28 November–1 December 2016; pp. 605–610. [Google Scholar] [CrossRef] [Green Version]
- Brogan, P.V.; Best, R.J.; Morrow, D.J.; McKinley, K.; Kubik, M.L. Effect of BESS Response on Frequency and RoCoF During Underfrequency Transients. IEEE Trans. Power Syst. 2019, 34, 575–583. [Google Scholar] [CrossRef] [Green Version]
- Hosseinipour, A.; Hojabri, H. Virtual inertia control of PV systems for dynamic performance and damping en-hancement of DC microgrids with constant power loads. IET Renew. Power Gener. 2018, 12, 430–438. [Google Scholar] [CrossRef]
- Ratnam, K.S.; Palanisamy, K.; Teekaraman, Y.; Nikolovski, S.; Baghaee, H.R. An enhanced emulated inertia control for Grid-connected PV system with HESS in a weak grid. Energies 2021, 14, 1721. [Google Scholar]
- Zhu, J.; Hu, J.; Hung, W.; Wang, C.; Zhang, X.; Bu, S.; Li, Q.; Urdal, H.; Booth, C.D. Synthetic Inertia Control Strategy for Doubly Fed Induction Generator Wind Turbine Generators Using Lithium-Ion Supercapacitors. IEEE Trans. Energy Convers. 2018, 33, 773–783. [Google Scholar] [CrossRef]
- Zhang, R.; Fang, J.; Tang, Y. Inertia Emulation through Supercapacitor Energy Storage Systems. In Proceedings of the 10th International Conference on Power Electronics and ECCE Asia (ICPE 2019-ECCE Asia), Busan, Korea, 27–30 May 2019; Volume 3, pp. 1365–1370. [Google Scholar]
- Sarojini, R.K.; Palanisamy, K. Inertia emulation through supercapacitor for a weak grid. IEEE Access 2021, 9, 30793–30802. [Google Scholar] [CrossRef]
- Fang, J.; Yu, J.; Zhang, Y.; Goetz, S.M. An Estimation-Based Solution to Weak-Grid-Induced Small-Signal Stability Problems of Power Converters. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 4558–4572. [Google Scholar] [CrossRef]
- Dozein, M.G.; Mancarella, P.; Saha, T.K.; Yan, R. System strength and weak grids: Fun-damentals, challenges, and mitigation strategies. In Proceedings of the Australasian Universities Power Engineering Conference, AUPEC 2018, Auckland, New Zealand, 27–30 November 2018. [Google Scholar]
- Cao, X.; Han, M.; Khan, Z.W.; Zhang, L. Design and analysation of DC voltage synchronisation control for a VSC-MTDC based on virtual synchronous generator. IET Gener. Transm. Distrib. 2020, 14, 449–459. [Google Scholar] [CrossRef]
- Yap, K.Y.; Sarimuthu, C.R.; Lim, J.M.-Y. Grid Integration of Solar Photovoltaic System Using Machine Learning-Based Virtual Inertia Synthetization in Synchronverter. IEEE Access 2020, 8, 49961–49976. [Google Scholar] [CrossRef]
- Chen, Y.-K.; Wu, Y.-C.; Song, C.-C.; Chen, Y.-S. Design and Implementation of Energy Management System With Fuzzy Control for DC Microgrid Systems. IEEE Trans. Power Electron. 2012, 28, 1563–1570. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Salmasi, F.R. Power management of an isolated hybrid AC/DC micro-grid with fuzzy control of battery banks. IET Renew. Power Gener. 2015, 9, 484–493. [Google Scholar] [CrossRef]
- Kim, J.-Y.; Kim, H.-M.; Kim, S.-K.; Jeon, J.-H.; Choi, H.-K. Designing an Energy Storage System Fuzzy PID Controller for Microgrid Islanded Operation. Energies 2011, 4, 1443–1460. [Google Scholar] [CrossRef] [Green Version]
- Balasubramani, G.; Thangavelu, V.; Chinnusamy, M.; Subramaniam, U.; Pad-manaban, S.; Mihet-Popa, L. Infrared thermography based defects testing of solar pho- tovoltaic panel with fuzzy rule-based evaluation. Energies 2020, 13, 1343. [Google Scholar] [CrossRef] [Green Version]
- Bhattacharjee, C.; Roy, B.K. Fuzzy-supervisory control of a hybrid system to improve contractual grid support with fuzzy proportional-derivative and integral control for power quality improvement. IET Gener. Transm. Sion Distrib. 2018, 12, 1455–1465. [Google Scholar] [CrossRef]
- Talaq, J.; Al-Basri, F. Adaptive fuzzy gain scheduling for load frequency control. IEEE Trans. Power Syst. 1999, 14, 145–150. [Google Scholar] [CrossRef]
- Bevrani, H.; Daneshmand, P.R. Fuzzy Logic-Based Load-Frequency Control Concerning High Penetration of Wind Turbines. IEEE Syst. J. 2012, 6, 173–180. [Google Scholar] [CrossRef]
- Ying, H. Introduction to Fuzzy Control and Modeling. In Fuzzy Control and Modeling; Wiley: Hoboken, NJ, USA, 2010; p. 342. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | Value | Unit |
|---|---|---|
| Nominal voltage | 220 | [V] |
| Maximum operating voltage | 230 | [V] |
| Nominal Capacitance | 9.29 | [F] |
| Internal Series resistance | 0.18 | [Ω] |
| Membership Functions | Frequency | ROCOF | ||||
|---|---|---|---|---|---|---|
| NL | 0.08496 | −0.6 | 0.1274 | −0.4 | 1062 | −5000 |
| NS | −0.3 | −0.2 | −2500 | |||
| ZZ | 0 | 0 | 0 | |||
| PS | 0.3 | 0.2 | 2500 | |||
| PL | 0.6 | 0.4 | 5000 | |||
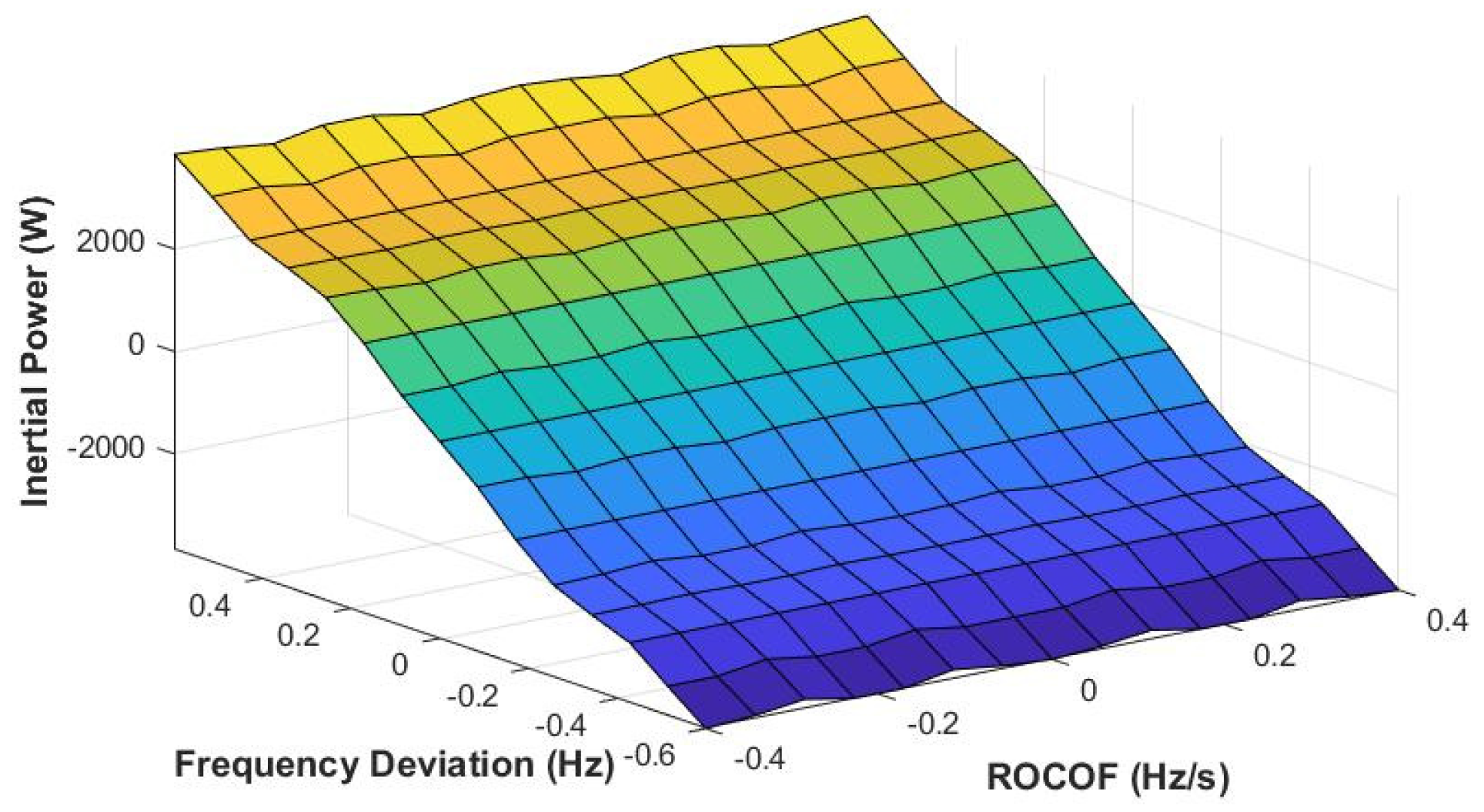
| ROCOF | Frequency Deviation | ||||
|---|---|---|---|---|---|
| NL | NS | ZZ | PS | PL | |
| NL | NL | NL | NS | PL | PL |
| NS | NL | NS | NS | PS | PL |
| ZZ | NL | NS | ZZ | PS | PL |
| PS | NL | NS | PS | PS | PL |
| PL | NL | NS | PS | PL | PL |
| Parameter | Value |
|---|---|
| Nominal frequency (f) Nominal Voltage (V*) Rated DC bus voltage () PV cell for both PV arrays PV cell for both PV arrays DC bus Capacitor Inverter side inductance () Load side inductance () Filter capacitance (C) Frequency Drooping Coefficient () Voltage drooping coefficient () Gain (k) Inertia coefficient () | 50 Hz 220 V 500 V VOC = 37.3 V, ISC = 8.2 A Vm = 30.3 V, Im = 7.5 A NS = 10, NP = 5 9.29 F, 220 V 3300 µF 2.1 mH, 5 mH 12 µF 50 120 1000 A.s 2.8 |
| Case 0 | Case 1 | Case 2 | |
|---|---|---|---|
| Frequency nadir (Hz) | 49.77 | 49.79 | 49.86 |
| ROCOF (Hz/s) | 0.27 | 0.242 | 0.202 |
| DC bus voltage at SC (V) | - | 487.9 | 497 |
| SC power (kW) | - | 1.61 | 1.821 |
| Case 0 | Case 1 | Case 2 | |
|---|---|---|---|
| Frequency nadir (Hz) | 50.23 | 50.195 | 50.176 |
| ROCOF (Hz/s) | 0.265 | 0.242 | 0.202 |
| DC bus voltage at SC (V) | - | 510.2 | 507 |
| SC power (kW) | - | −1.35 | −1.579 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sarojini, R.K.; Palanisamy, K.; De Tuglie, E. A Fuzzy Logic-Based Emulated Inertia Control to a Supercapacitor System to Improve Inertia in a Low Inertia Grid with Renewables. Energies 2022, 15, 1333. https://doi.org/10.3390/en15041333
Sarojini RK, Palanisamy K, De Tuglie E. A Fuzzy Logic-Based Emulated Inertia Control to a Supercapacitor System to Improve Inertia in a Low Inertia Grid with Renewables. Energies. 2022; 15(4):1333. https://doi.org/10.3390/en15041333
Chicago/Turabian StyleSarojini, Ratnam Kamala, Kaliannan Palanisamy, and Enrico De Tuglie. 2022. "A Fuzzy Logic-Based Emulated Inertia Control to a Supercapacitor System to Improve Inertia in a Low Inertia Grid with Renewables" Energies 15, no. 4: 1333. https://doi.org/10.3390/en15041333
APA StyleSarojini, R. K., Palanisamy, K., & De Tuglie, E. (2022). A Fuzzy Logic-Based Emulated Inertia Control to a Supercapacitor System to Improve Inertia in a Low Inertia Grid with Renewables. Energies, 15(4), 1333. https://doi.org/10.3390/en15041333