
Multi-Objective Optimization-Based Health-Conscious Predictive Energy Management Strategy for Fuel Cell Hybrid Electric Vehicles

 , ,
, ,  ,
,  ,
, 

Abstract
:1. Introduction
- A proposed objective function formulated within the MPC framework that minimizes the hydrogen cost, preserves FC dynamics, and extends the lithium-ion battery lifespan;
- A semi-active topology is proposed where the MPC deal with the severe nonlinearities and the time-varying property of a FCHEV;
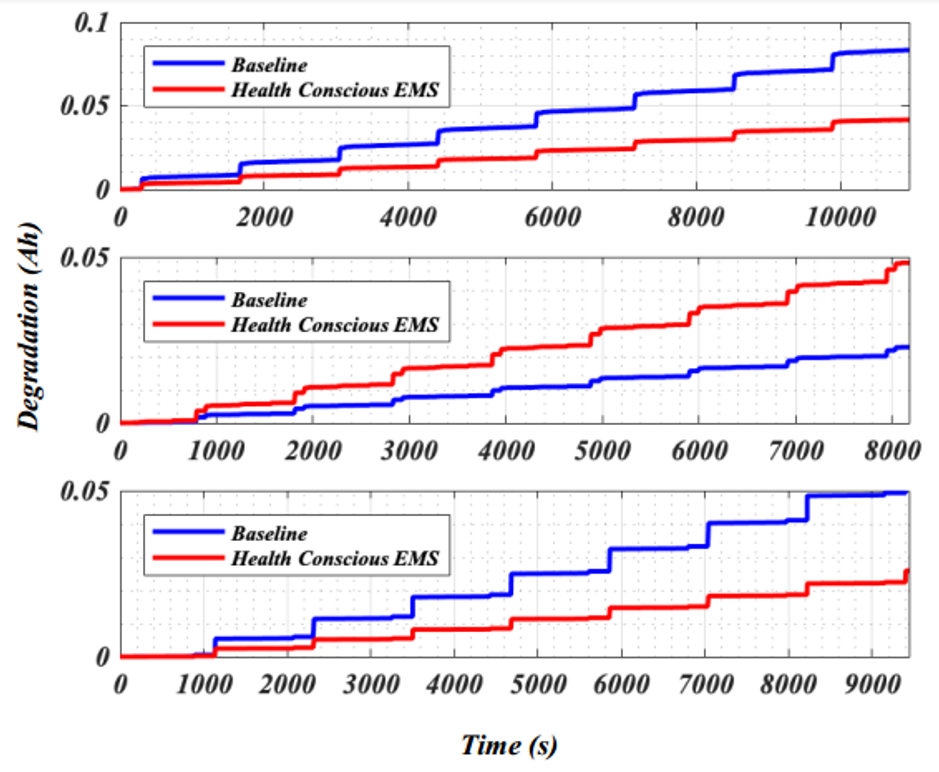
- A comparative study between the proposed method and a Fuzzy Logic (FL) method is conducted using three different driving cycles in simulation, followed by experimental validation using a test protocol.
2. FCHEV Modeling
2.1. PEMFC Model
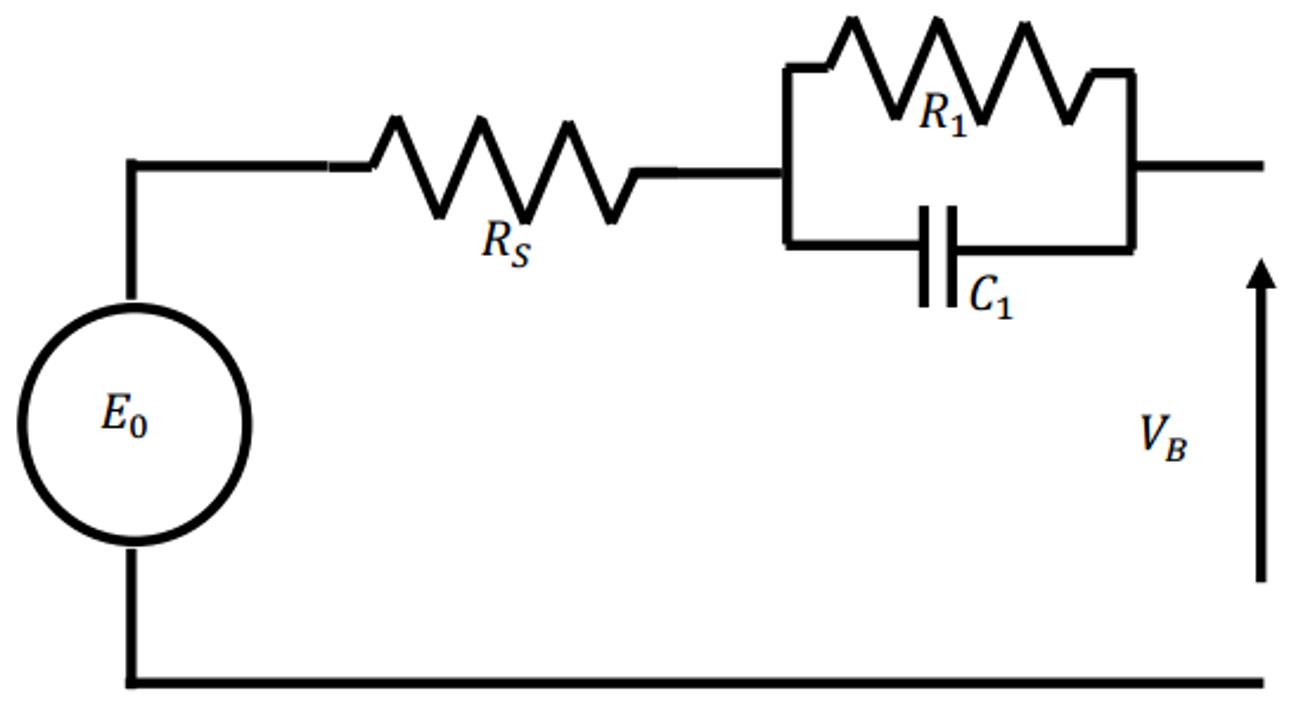
2.2. Lithium Ion Battery Model
2.3. Battery Degradation Model
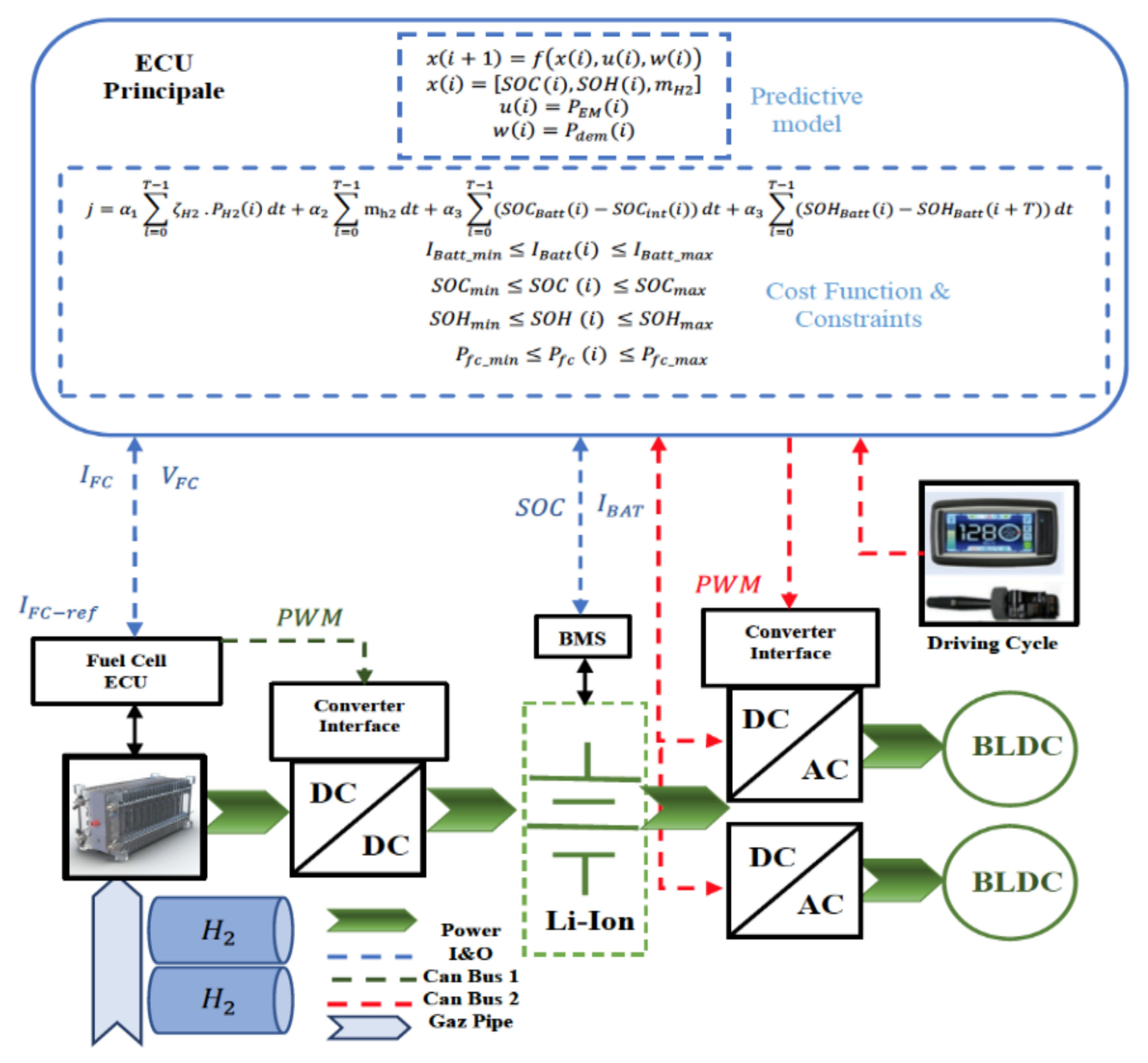
3. Health Conscious-Based EMS for FCHEV
- Minimize fuel consumption,
- Preserve the PEMFC dynamic,
- Keep the SOC of the lithium-ion battery at the same level as the initial value,
- Preserve the lithium-ion battery pack.
4. Simulation Results and Discussions
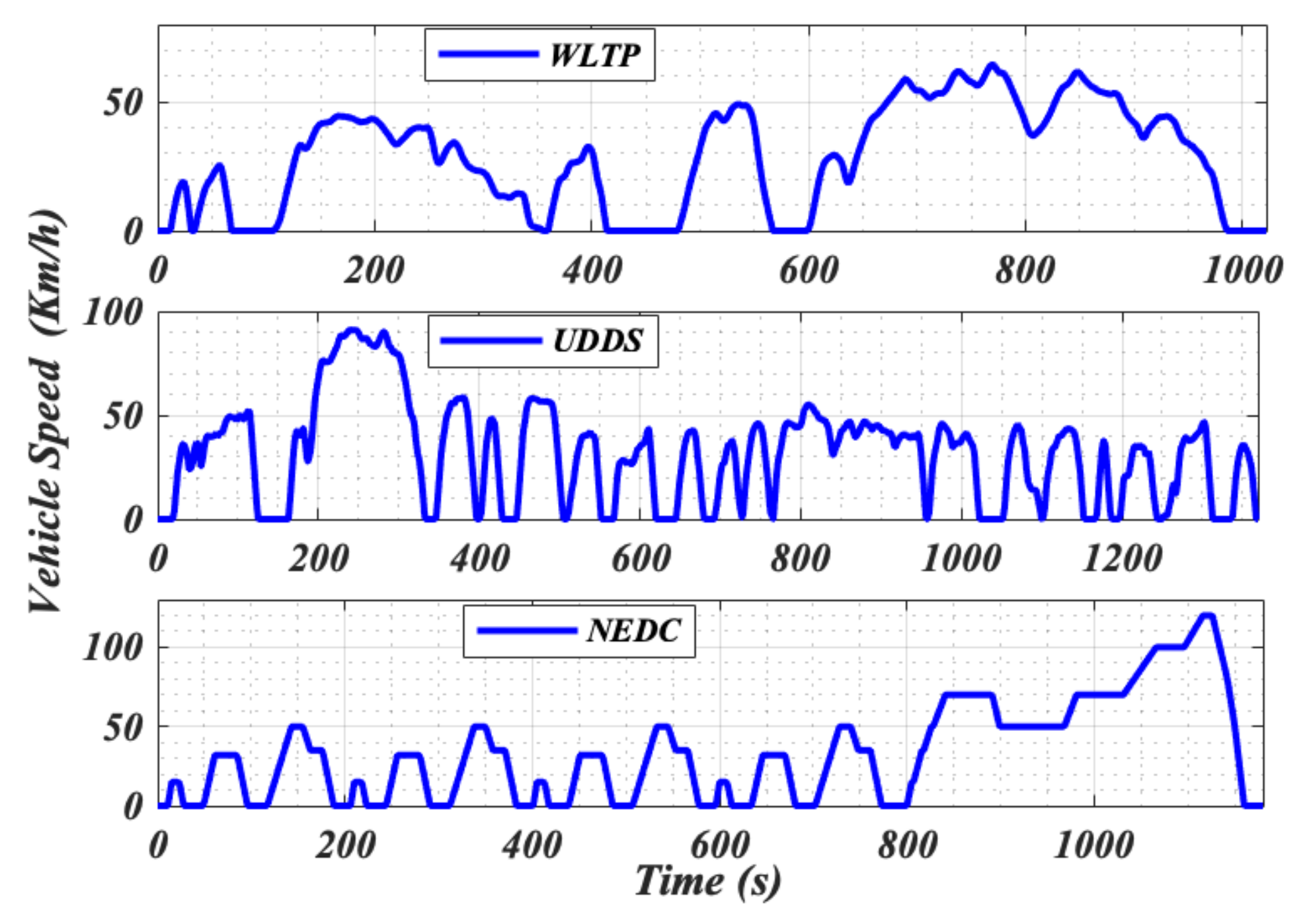
4.1. Driving Cycles
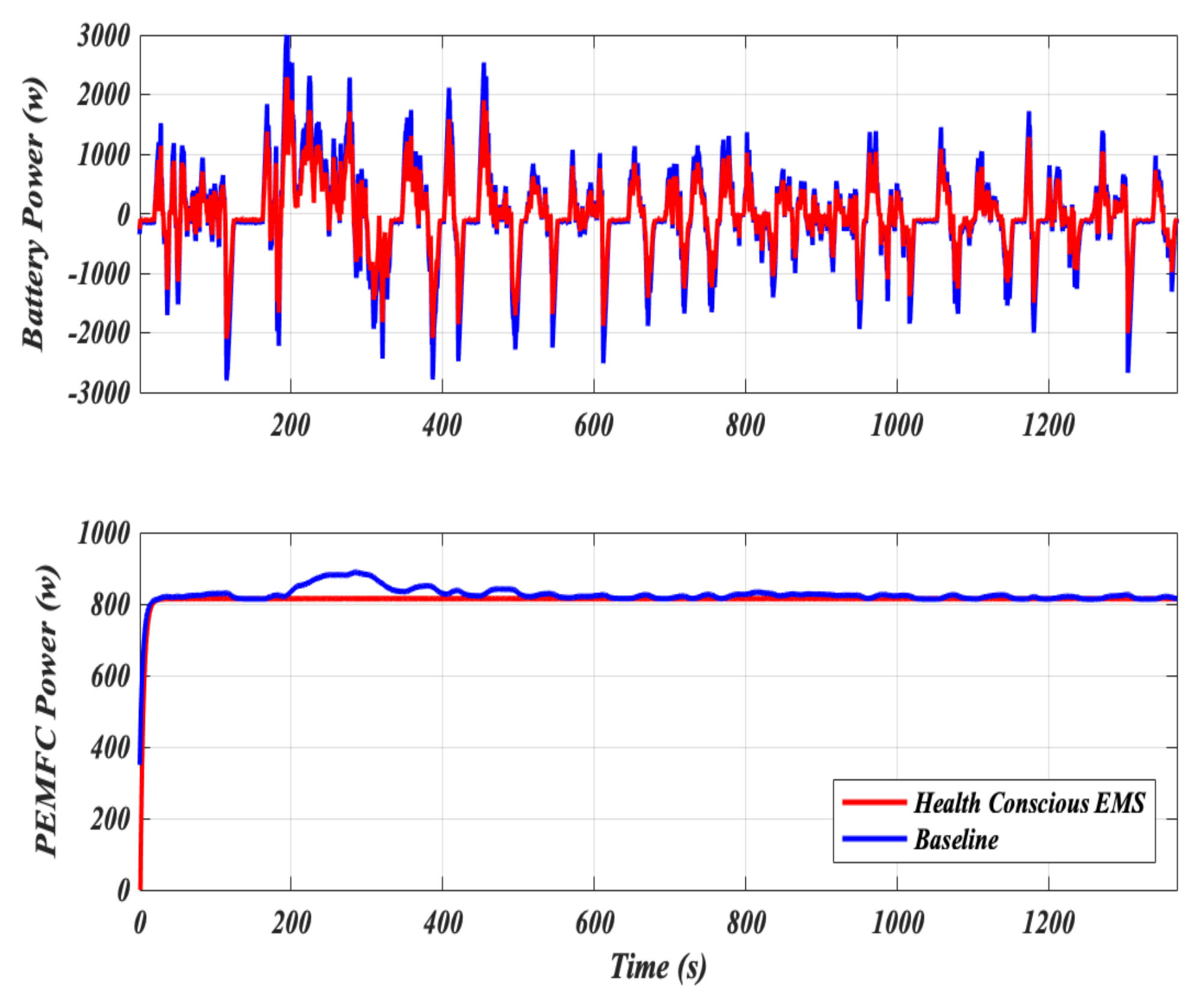
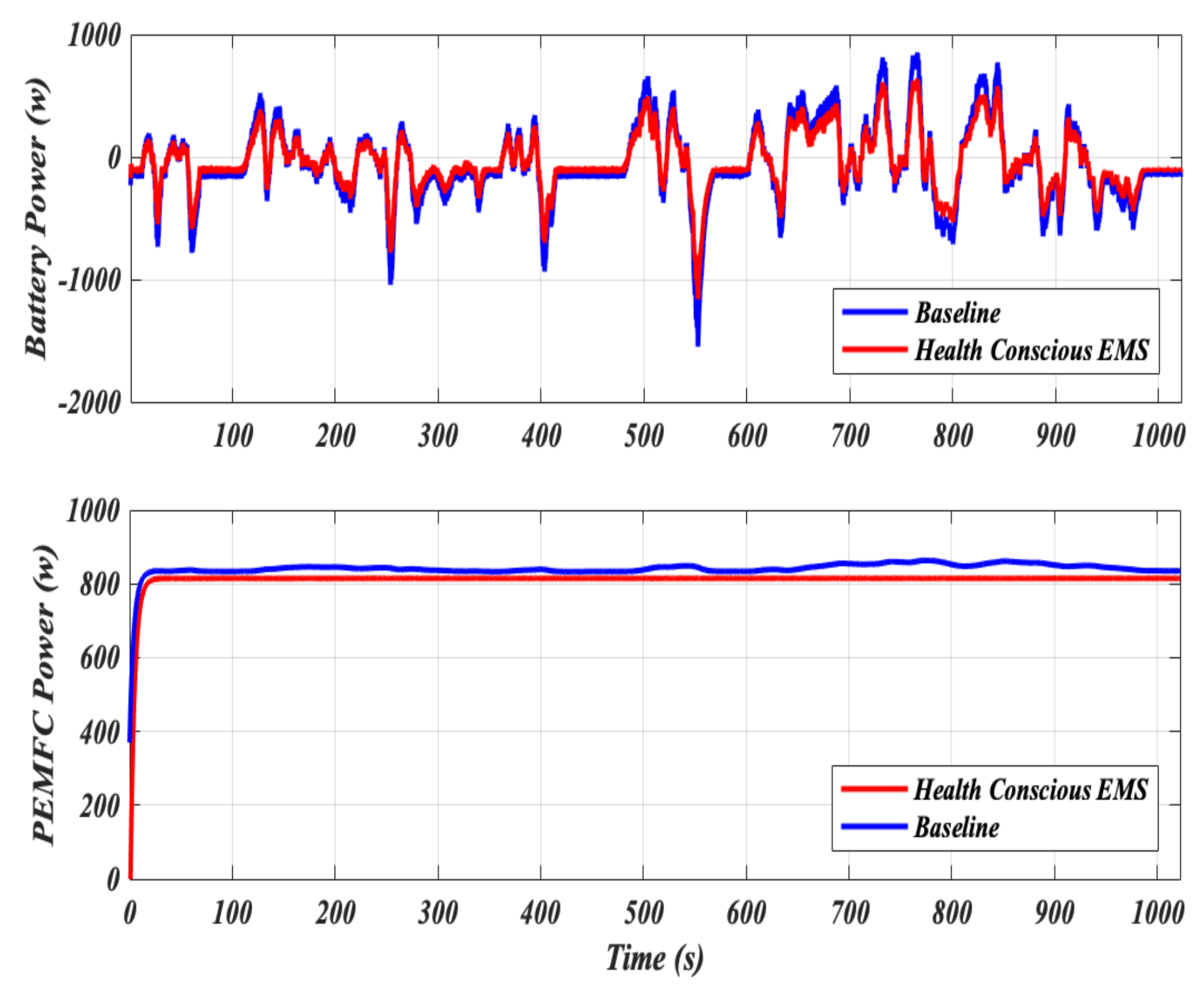
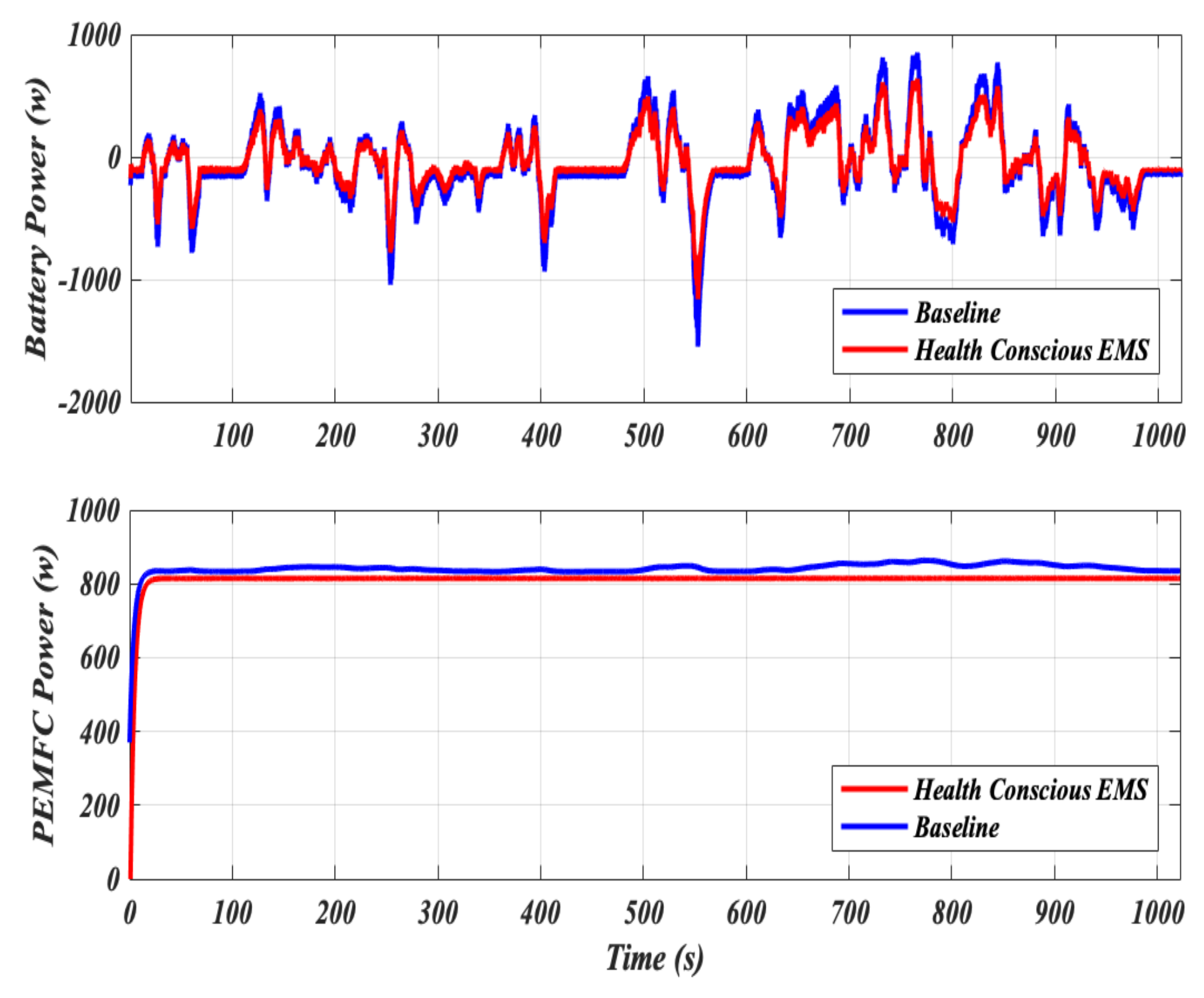
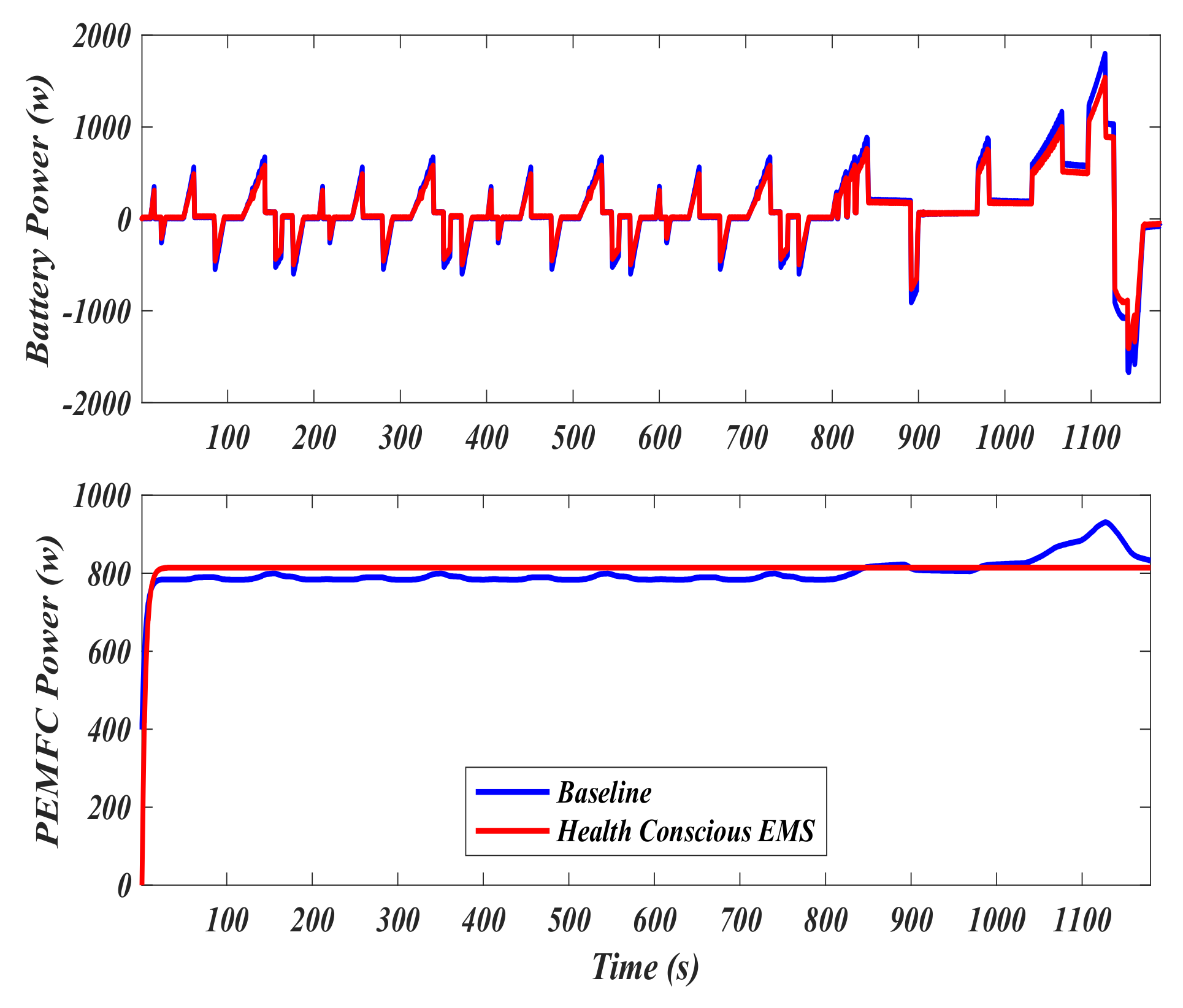
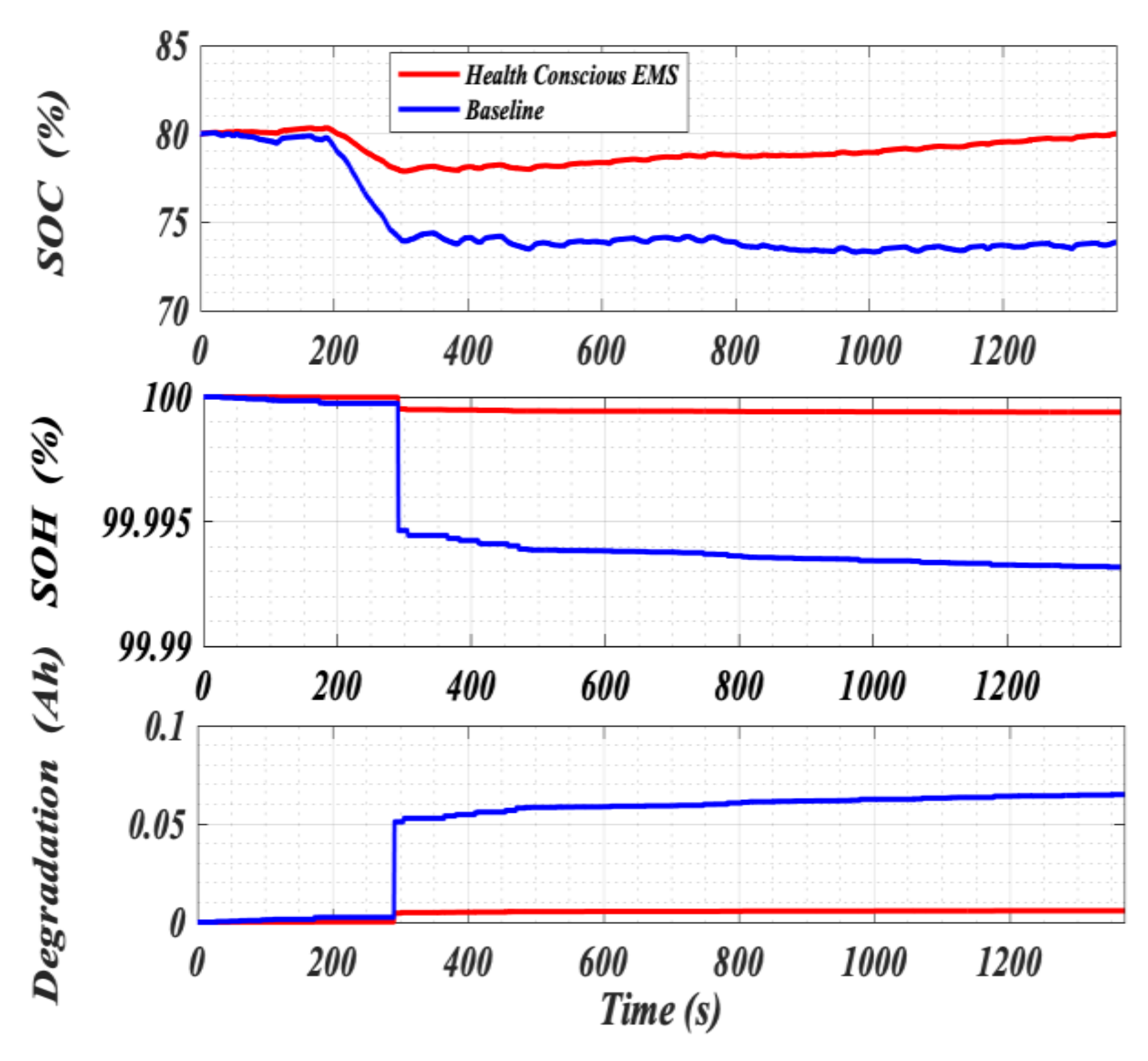
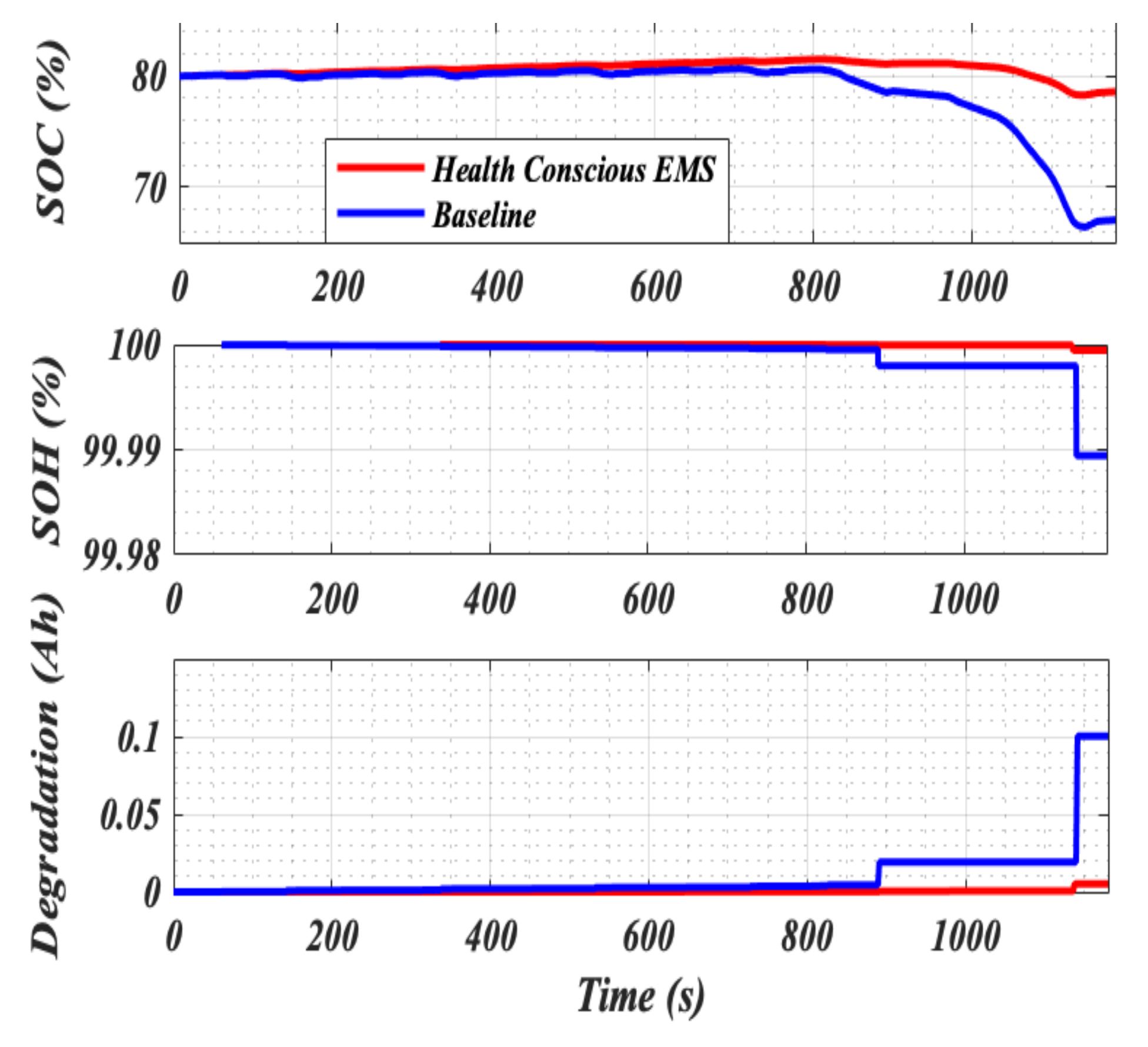
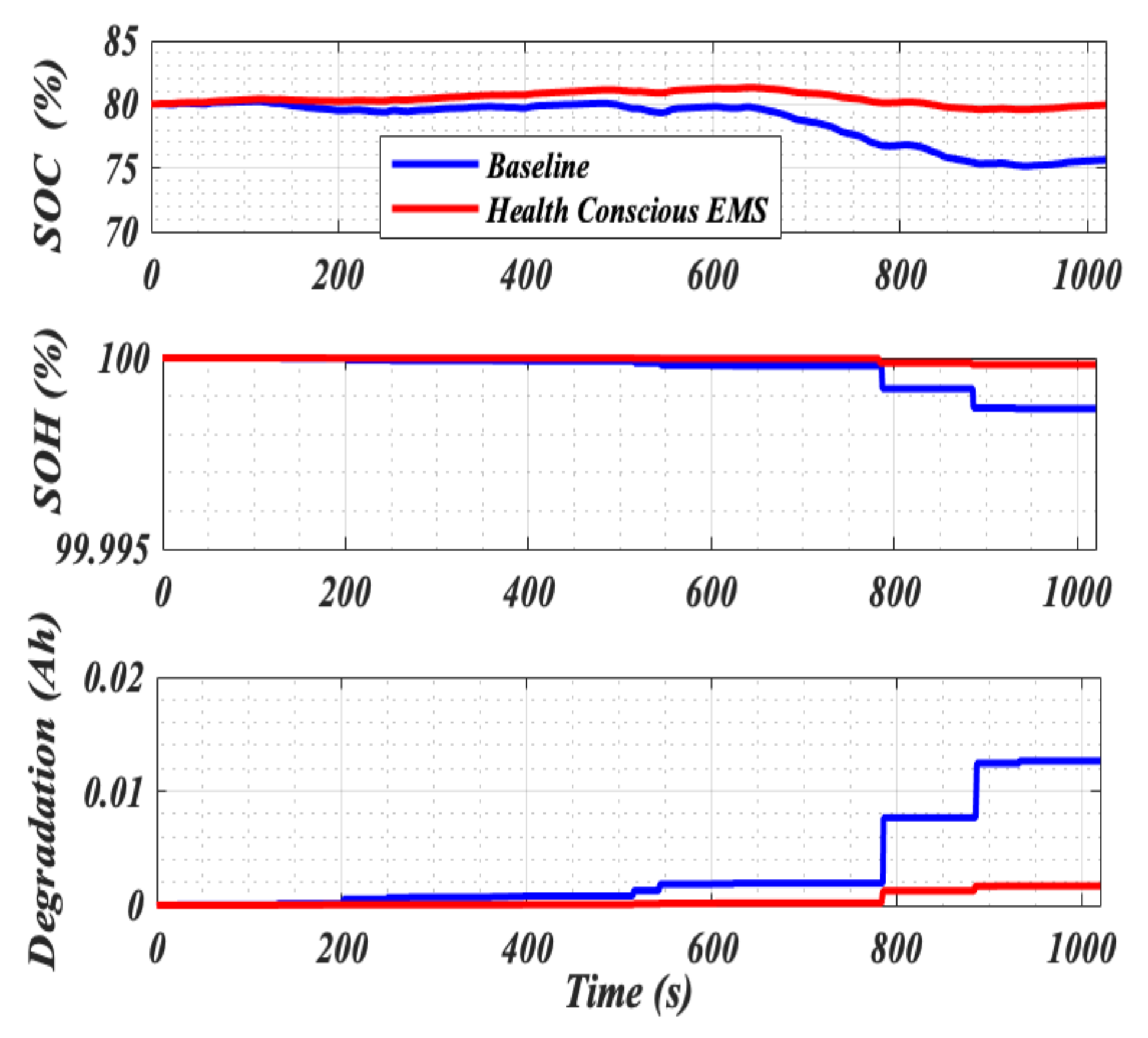
4.2. Comparison Results
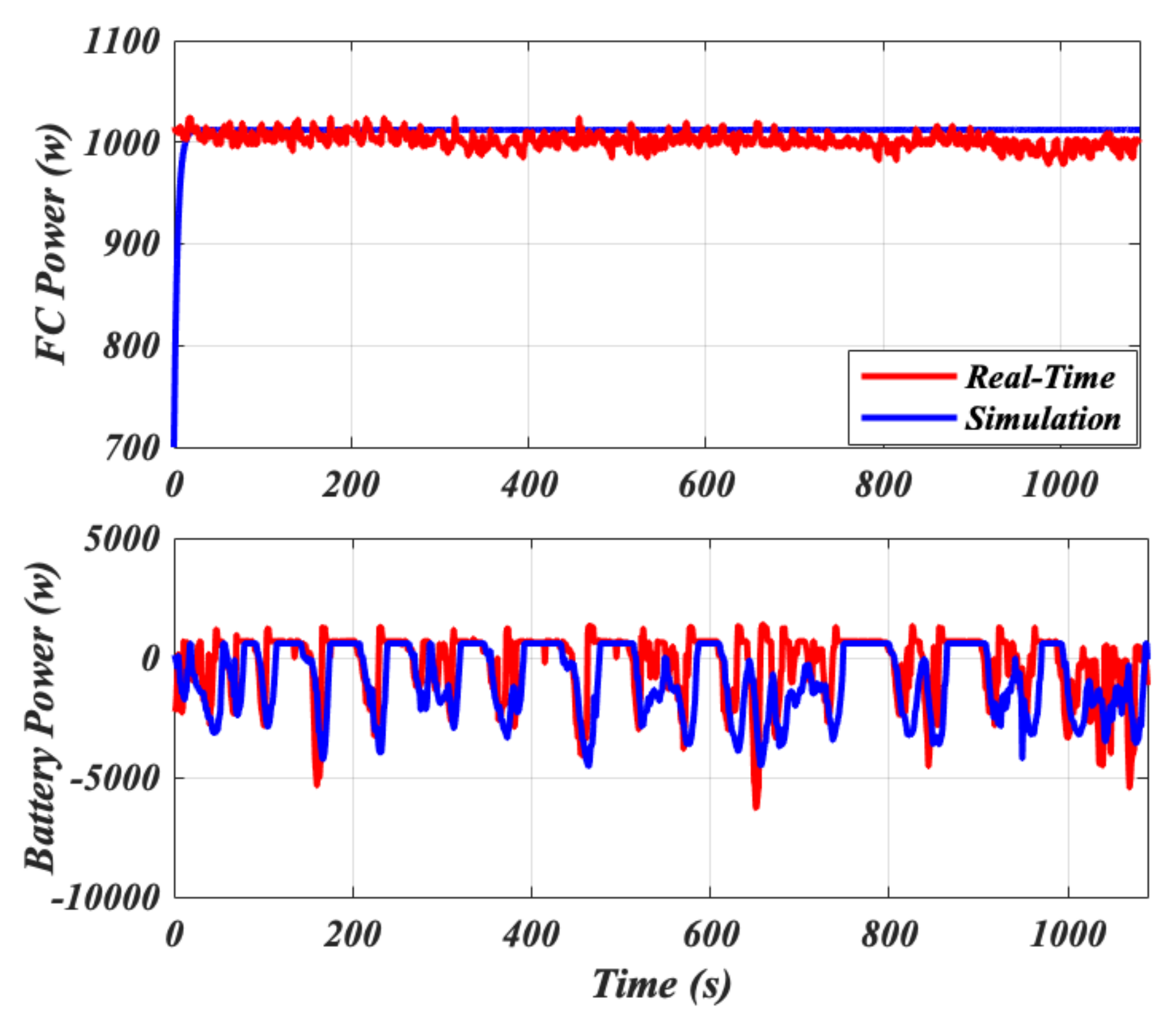
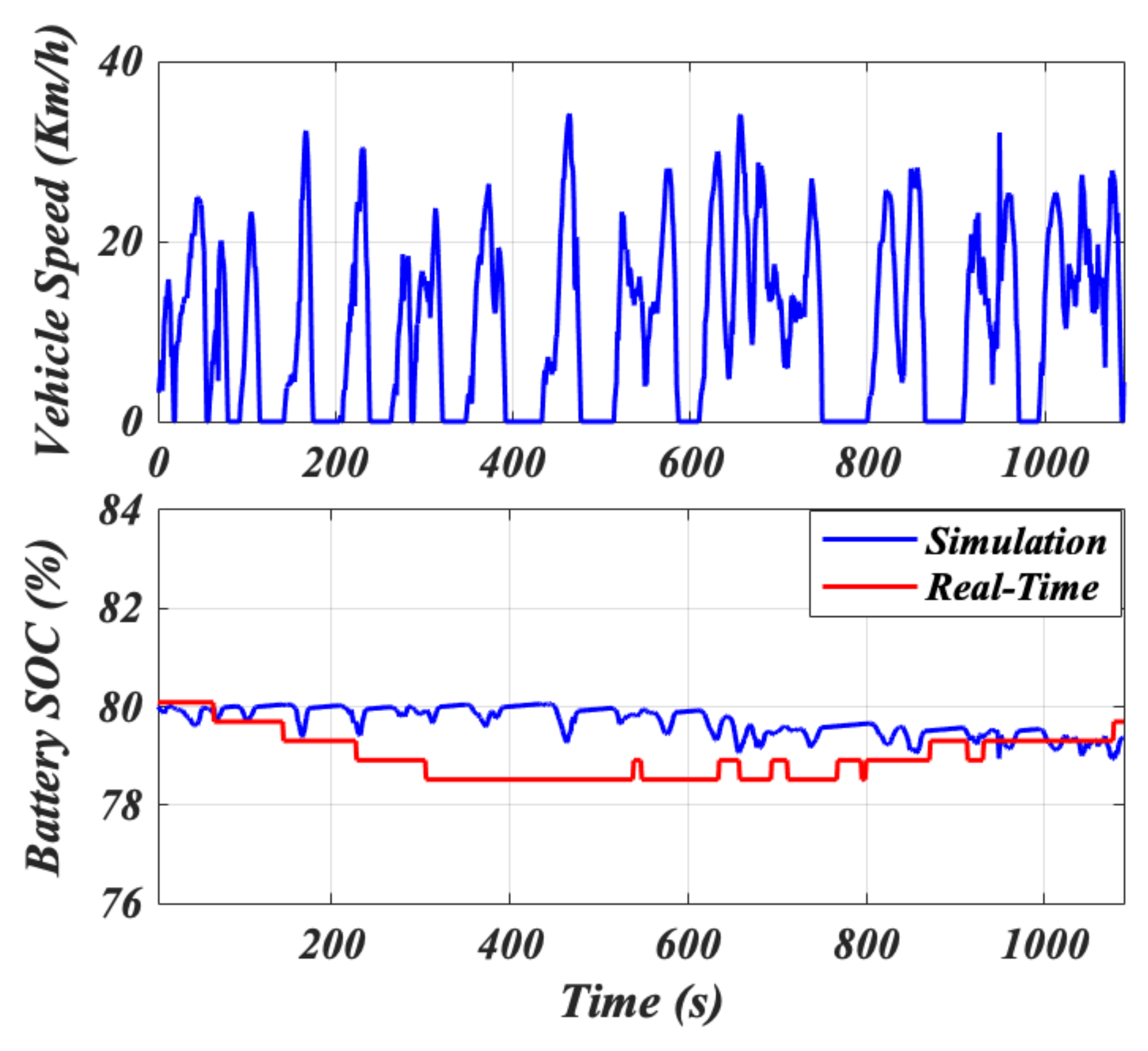
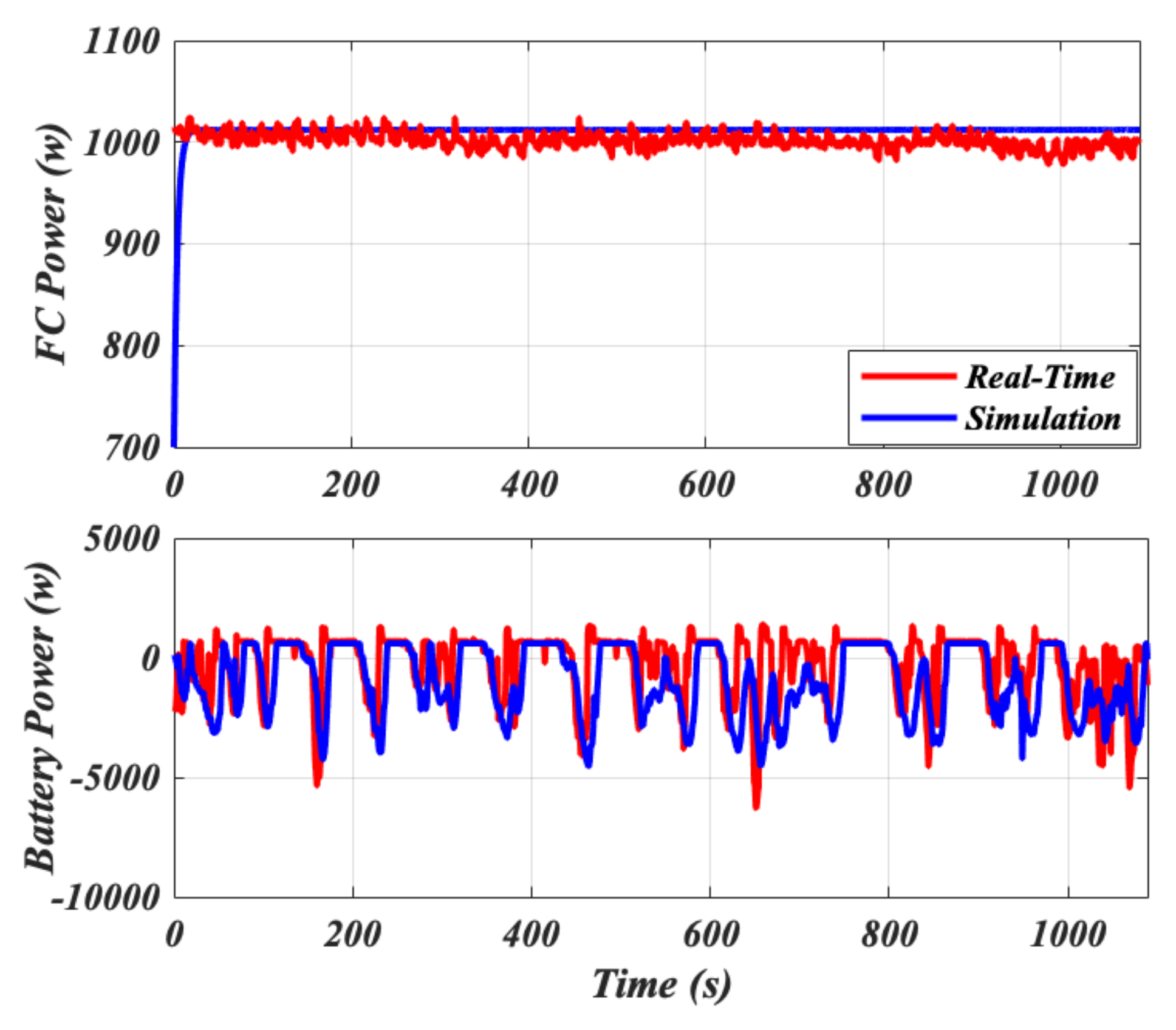
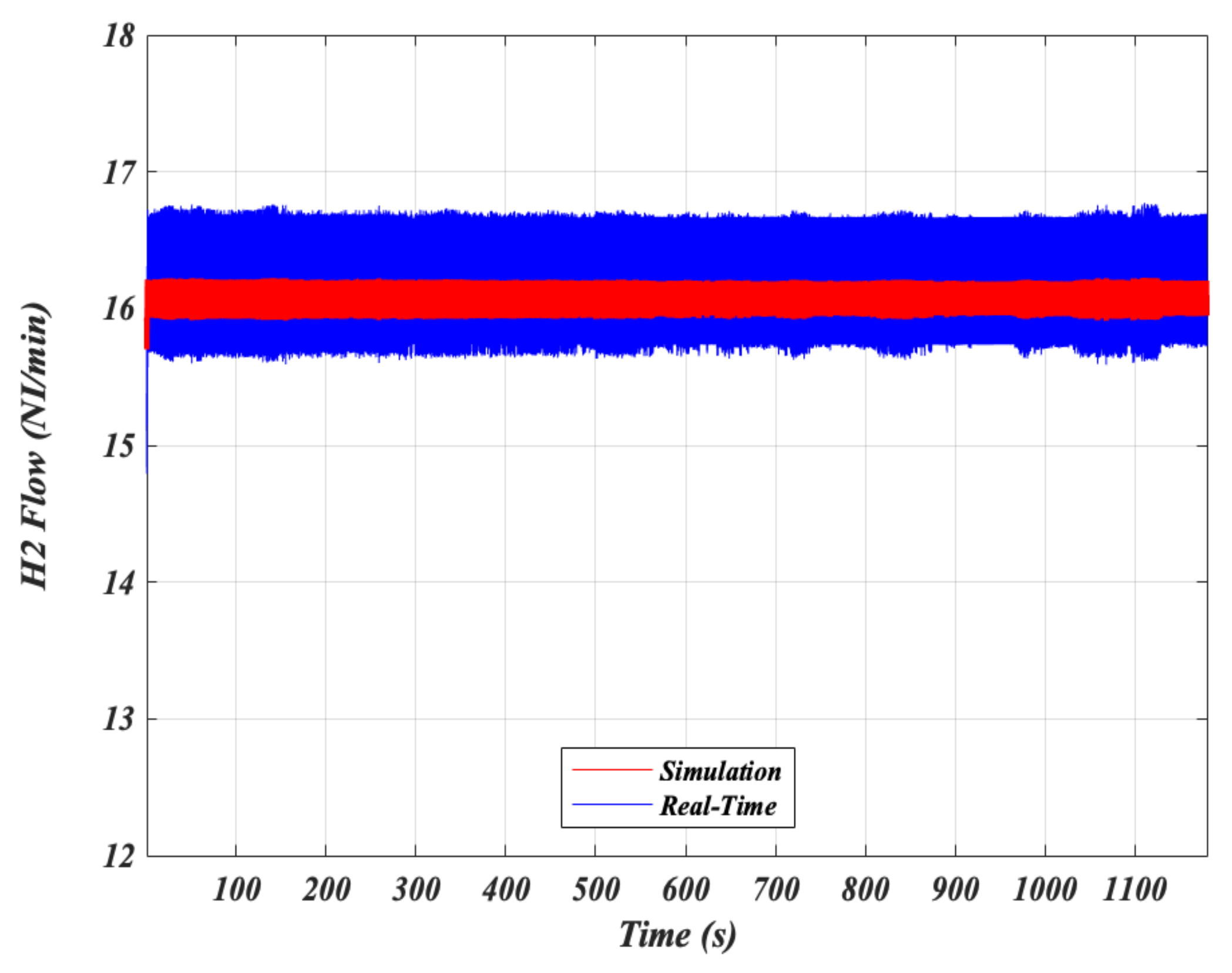
5. Real-Time Assessment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
- Total mass of the vehicle (kg) 530.
- Coefficient of rolling resistance 0.02.
- Aerodynamic drag coefficient 0.8.
- Frontal area of vehicle (m2) 2.56.
- Gravitational force (m/s2) 9.8.
- Air density (Kg/m3) 1.25.
References
- Lakshminarayanan, V.; Chemudupati, V.G.S.; Pramanick, S.K.; Rajashekara, K. Real-time optimal energy management controller for electric vehicle integration in workplace microgrid. IEEE Trans. Transp. Electrif. 2019, 5, 174–185. [Google Scholar] [CrossRef]
- Balali, Y.; Stegen, S. Review of energy storage systemsfor vehicles based on technology, environmental impacts, and costs. Renew. Sustain. Energy Rev. 2021, 135, 110185. [Google Scholar] [CrossRef]
- Snoussi, J.; Elghali, S.B.; Benbouzid, M.; Mimouni, M.F. Auto-adaptive filtering-based energy management strategy for fuel cell hybrid electric vehicles. Energies 2018, 11, 2118. [Google Scholar] [CrossRef] [Green Version]
- Das, H.S.; Tan, C.W.; Yatim, A.H.M. Fuel cell hybrid electric vehicles: A review on power conditioning units and topologies. Renew. Sustain. Energy Rev. 2017, 76, 268–291. [Google Scholar] [CrossRef]
- Fernandez, A.M.; Kandidayeni, M.; Boulon, L.; Chaoui, H. An adaptive state machine based energy management strategy for a multi-stack fuel cell hybrid electric vehicle. IEEE Trans. Veh. Technol. 2019, 69, 220–234. [Google Scholar] [CrossRef]
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M.; Donateo, T. Frequency separation-based power management strategy for a fuel cell-powered drone. In Proceedings of the 2020 2nd International Conference on Smart Power Internet Energy Systems (SPIES), Bangkok, Thailand, 15–18 September 2020; pp. 209–214. [Google Scholar]
- Sulaiman, N.; Hannan, M.A.; Mohamed, A.; Ker, P.J.; Majlan, E.H.; Daud, W.R.W. Optimization of energy management system for fuel-cell hybrid electric vehicles: Issues and recommendations. Appl. Energy 2018, 228, 2061–2079. [Google Scholar] [CrossRef]
- Sellali, M.; Betka, A.; Djerdir, A. Power management improvement of hybrid energy storage system based on h control. Math. Comput. Simul. 2020, 167, 478–494. [Google Scholar] [CrossRef]
- Li, Q.; Su, B.; Pu, Y.; Han, Y.; Wang, T.; Yin, L.; Chen, W. Astate machine control based on equivalent consumption minimization for fuel cell/ supercapacitor hybrid tramway. IEEE Trans. Transp. Electrif. 2019, 5, 552–564. [Google Scholar] [CrossRef]
- Sellali, M.; Abdeddaim, S.; Betka, A.; Djerdir, A.; Drid, S.; Tiar, M. Fuzzy-super twisting control implementation of battery/super capacitor for electric vehicles. ISA Trans. 2019, 95, 243–253. [Google Scholar] [CrossRef]
- Sellali, M.; Betka, A.; Drid, S.; Djerdir, A.; Allaoui, L.; Tiar, M. Novel control implementation for electric vehicles based on fuzzy-back stepping approach. Energy 2019, 178, 644–655. [Google Scholar] [CrossRef]
- Unger, J.; Kozek, M.; Jakubek, S. Nonlinear modelpredictive energy management controller with load and cycle prediction for non-road HEV. Control Eng. Pract. 2015, 36, 120–132. [Google Scholar] [CrossRef]
- Peng, J.; He, H.; Xiong, R. Rule based energy management strategy for a series–parallel plug-in hybrid electric bus optimized by dynamic programming. Appl. Energy 2017, 185, 1633–1643. [Google Scholar] [CrossRef]
- Sellali, M.; Betka, A.; Drid, S.; Djerdir, A.; Malik, O.P. Hardware implementation of an improved control strategy for battery–supercapacitor hybrid system in electric vehicles. IET Electr. Syst. Transp. 2020, 10, 204–212. [Google Scholar] [CrossRef]
- Mamun, A.; Liu, Z.; Rizzo, D.M.; Onori, S. An integrated designed control optimization framework for hybrid military vehicle using lithium-ion battery and supercapacitor as energy storage devices. IEEE Trans. Transp. Electrif. 2019, 5, 239–251. [Google Scholar] [CrossRef]
- Trovao, J.P.F.; Santos, V.D.N.; Antunes, C.H.; Pereirinha, P.G.; Jorge, H.M. A real-time energy manage-ment architecture for multisource electric vehicles. IEEE Trans. Ind. Electron. 2014, 62, 3223–3233. [Google Scholar] [CrossRef]
- Lü, X.; Wu, Y.; Lian, J.; Zhang, Y.; Chen, C.; Wang, P.; Meng, L. Energy management of hybrid electric vehicles: A review of energy optimization of fuel cell hybrid power system based on genetic algorithm. Energy Convers. Manag. 2020, 205, 112474. [Google Scholar] [CrossRef]
- Serrao, L.; Onori, S.; Rizzoni, G. Ecms as a realization of pontryagin’s minimum principle for HEV control. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009; IEEE: Manhattan, NY, USA, 2009; pp. 3964–3969. [Google Scholar]
- Yang, C.; You, S.; Wang, W.; Li, L.; Xiang, C. A stochastic predictive energy management strategy for plug-in hybrid electric vehicles based on fast rolling optimization. IEEE Trans. Ind. Electron. 2019, 67, 9659–9670. [Google Scholar] [CrossRef]
- Yan, Y.; Li, Q.; Chen, W.; Huang, W.; Liu, J. Hierarchical management control based on equivalent fitting circle and equivalent energy consumption method for multiple fuel cells hybrid power system. IEEE Trans. Ind. Electron. 2020, 67, 2786–2797. [Google Scholar] [CrossRef]
- Ravey, A.; Blunier, B.; Miraoui, A. Control strategies for fuel-cell-based hybrid electric vehicles: From offline to online and experimental results. IEEE Trans. Veh. Technol. 2012, 61, 2452–2457. [Google Scholar] [CrossRef]
- Zhang, S.; Xiong, R. Adaptive energy management of a plug-in hybrid electric vehicle based on driving pattern recognition and dynamic programming. Appl. Energy 2015, 155, 68–78. [Google Scholar] [CrossRef]
- Pereira, D.F.; Lopes, F.D.; Watanabe, E.H. Non-linear model predictive control for the energy management of fuel cell hybrid electric vehicles in real-time. IEEE Trans. Ind. Electron. 2020, 68, 3213–3223. [Google Scholar] [CrossRef]
- Zhou, D.; Al-Durra, A.; Matraji, I.; Ravey, A.; Gao, F. Online energy management strategy of fuel cell hybrid electric vehicles: A fractional-order extremum seeking method. IEEE Trans. Ind. Electron. 2018, 65, 6787–6799. [Google Scholar] [CrossRef]
- Liu, C.; Murphey, Y.L. Optimal power management based on q-learning and neuro-dynamic programming for plug-in hybrid electric vehicles. IEEE Trans. Neural Netw. Learn. Syst. 2019, 31, 1942–1954. [Google Scholar] [CrossRef] [PubMed]
- Sellali, M.; Betka, A.; Djerdir, A.; Yang, Y.; Bahri, I.; Drid, S. A novel energy management strategy in electric vehicle based on H∞ self-gain scheduled for linear parameter varying systems. IEEE Trans. Energy Convers. 2021, 36, 767–778. [Google Scholar] [CrossRef]
- Liu, T.; Hu, X.; Hu, W.; Zou, Y. A heuristic planning reinforcement learning-based energy management for power-split plug-in hybrid electric vehicles. IEEE Trans. Ind. Inform. 2019, 15, 6436–6445. [Google Scholar] [CrossRef]
- Hou, C.; Ouyang, M.; Xu, L.; Wang, H. Approximate Pontryagin’s minimum principle applied to the energy management of plug-in hybrid electric vehicles. Appl. Energy 2014, 115, 174–189. [Google Scholar] [CrossRef]
- Ebbesen, S.; Elbert, P.; Guzzella, L. Battery state-of-health perceptive energy management for hybrid electric vehicles. IEEE Trans. Veh. Technol. 2012, 61, 2893–2900. [Google Scholar] [CrossRef]
- Tang, L.; Rizzoni, G.; Onori, S. Energy management strategy for HEVs including battery life optimization. IEEE Trans. Transp. Electrif. 2015, 1, 211–222. [Google Scholar] [CrossRef]
- Zhang, S.; Hu, X.; Xie, S.; Song, Z.; Hu, L.; Hou, C. Adaptively coordinated optimization of battery aging and energy management in plug-in hybrid electric buses. Appl. Energy 2019, 256, 113891. [Google Scholar] [CrossRef]
- Cheng, M.; Chen, B. Nonlinear model predictive control of a power-split hybrid electric vehicle with consideration of battery aging. ASME J. Dyn. Syst. Meas. Control 2019, 141, 081008. [Google Scholar] [CrossRef] [Green Version]
- Guo, N.; Zhang, X.; Zou, Y.; Guo, L.; Du, G. Real-time predictive energy management of plug-in hybrid electric vehicles for coordination of fuel economy and battery degradation. Energy 2021, 214, 119070. [Google Scholar] [CrossRef]
- De Pascali, L.; Biral, F.; Onori, S. Aging-aware optimal energy management control for a parallel hybrid vehicle based on electrochemical-degradation dynamics. IEEE Trans. Veh. Technol. 2020, 69, 10868–10878. [Google Scholar] [CrossRef]
- Hu, X.; Zou, C.; Tang, X.; Liu, T.; Hu, L. Cost-optimal energy management of hybrid electric vehicles using fuel cell/battery health-aware predictive control. IEEE Trans. Power Electron. 2019, 35, 382–392. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Li, H.; Ravey, A.; Péra, M.-C. An integrated predictive energy management for light-duty range-extended plug-in fuel cell electric vehicle. J. Power Sources 2020, 451, 227780. [Google Scholar] [CrossRef]
- Pasricha, S.; Shaw, S.R. A dynamic pem fuel cell model. IEEE Trans. Energy Convers. 2006, 21, 484–490. [Google Scholar] [CrossRef]
- Chiu, L.; Diong, B.; Gemmen, R.S. An improved small-signal model of the dynamic behavior of pem fuel cells. IEEE Trans. Ind. Appl. 2004, 40, 970–977. [Google Scholar] [CrossRef]
- Lukas, M.D.; Lee, K.Y.; Ghezel-Ayagh, H. Development of a stack simulation model for control study on direct reformingmolten carbonate fuel cell power plant. IEEE Trans. Energy Convers. 1999, 14, 1651–1657. [Google Scholar] [CrossRef]
- Friede, W.; Raël, S.; Davat, B. Mathematical model and characterization of the transient behavior of a pem fuel cell. IEEE Trans. Power Electron. 2004, 19, 1234–1241. [Google Scholar] [CrossRef]
- Ravey, A.; Watrin, N.; Blunier, B.; Bouquain, D.; Miraoui, A. Energy-source-sizing methodology for hybrid fuel cell vehicles based on sta-tistical description of driving cycles. IEEE Trans. Veh. Technol. 2011, 60, 4164–4174. [Google Scholar] [CrossRef]
- Mehdi, S.; Achour, B.; Sabrina, A.; Ouchen, S. Implementation of a real-time energy management consisting of a battery and a supercapac-itor. In Proceedings of the 2017 5th International Conference on Electrical Engineering-Boumerdes (ICEE-B), Boumerdes, Algeria, 29–31 October 2017; pp. 1–6. [Google Scholar]
- Mehdi, S.; Betka, A.; Drid, S.; Djerdir, A.; Tiar, M.; Abdedaim, S. Implementation of new adaptive power-split management strategy in abattery-super capacitor electric vehicle. In Proceedings of the 2018 International Conference on Electrical Sciences and Technologies in Maghreb (CISTEM), Algiers, Algeria, 28–31 October 2018; pp. 1–6. [Google Scholar]
- Buller, S.; Thele, M.; de Doncker, R.W.; Karden, E. Impedance-based simulation models of supercapacitors andli-ion batteries for power electronic applications. IEEE Trans. Ind. Appl. 2005, 41, 742–747. [Google Scholar] [CrossRef]
- Wang, J.; Liu, P.; Hicks-Garner, J.; Sherman, E.; Soukiazian, S.; Verbrugge, M.; Tataria, H.; Musser, J.; Finamore, P. Cycle-life model for graphite-lifepo4 cells. J. Power Sources 2011, 196, 3942–3948. [Google Scholar] [CrossRef]
- Johannesson, L.; Murgovski, N.; Ebbesen, S.; Egardt, B.; Gelso, E.; Hellgren, J. Including a battery state of health model in the hev component sizing and optimal control problem. IFAC Proc. Vol. 2013, 46, 398–403. [Google Scholar] [CrossRef] [Green Version]
- He, J.; Wei, Z.; Bian, X.; Yan, F. State-of-health estimation of lithium-ion batteries using incremental capacity analysis based on volt-age–capacity model. IEEE Trans. Transp. Electrif. 2020, 6, 417–426. [Google Scholar]
- Perez, H.E.; Hu, X.; Dey, S.; Moura, S.J. Optimal charging of li-ion batteries with coupled electro-thermal-aging dynamics. IEEE Trans. Veh. Technol. 2017, 66, 7761–7770. [Google Scholar]
- Panigrahi, D.; Chiasserini, C.; Dey, S.; Rao, R.; Raghunathan, A.; Lahiri, K. Battery life estimation of mobile embedded systems. In Proceedings of the VLSI Design 2001. Fourteenth International Conference on VLSI Design, Bangalore, India, 7 January 2001; pp. 57–63. [Google Scholar]
- Marano, V.; Onori, S.; Guezennec, Y.; Rizzoni, G.; Madella, N. Lithium-ion batteries life estimation for plug-in hybrid electric vehicles. In Proceedings of the 2009 IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–10 September 2009; IEEE: Manhattan, NY, USA, 2009; pp. 536–543. [Google Scholar]
- Morales-Morales, J.; Cervantes, I.; Cano-Castillo, U. On the design of robust energy management strategies for fchev. IEEE Trans. Veh. Technol. 2014, 64, 1716–1728. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cycles | Fuel Consumption (Kg/8 Cycles) | Cost (3.75 €/Kg) | ||||
|---|---|---|---|---|---|---|
| Baseline | MPC | Improvement | Baseline | MPC | Benefit | |
| WLTP | 1.36 | 1.09 | 20.01% | 4.85 | 3.89 | 0.96 |
| UDDS | 2.07 | 1.56 | 24.50% | 7.38 | 5.56 | 1.82 |
| NEDC | 1.78 | 1.34 | 25% | 6.35 | 4.78 | 1.57 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sellali, M.; Ravey, A.; Betka, A.; Kouzou, A.; Benbouzid, M.; Djerdir, A.; Kennel, R.; Abdelrahem, M. Multi-Objective Optimization-Based Health-Conscious Predictive Energy Management Strategy for Fuel Cell Hybrid Electric Vehicles. Energies 2022, 15, 1318. https://doi.org/10.3390/en15041318
Sellali M, Ravey A, Betka A, Kouzou A, Benbouzid M, Djerdir A, Kennel R, Abdelrahem M. Multi-Objective Optimization-Based Health-Conscious Predictive Energy Management Strategy for Fuel Cell Hybrid Electric Vehicles. Energies. 2022; 15(4):1318. https://doi.org/10.3390/en15041318
Chicago/Turabian StyleSellali, Mehdi, Alexandre Ravey, Achour Betka, Abdellah Kouzou, Mohamed Benbouzid, Abdesslem Djerdir, Ralph Kennel, and Mohamed Abdelrahem. 2022. "Multi-Objective Optimization-Based Health-Conscious Predictive Energy Management Strategy for Fuel Cell Hybrid Electric Vehicles" Energies 15, no. 4: 1318. https://doi.org/10.3390/en15041318
APA StyleSellali, M., Ravey, A., Betka, A., Kouzou, A., Benbouzid, M., Djerdir, A., Kennel, R., & Abdelrahem, M. (2022). Multi-Objective Optimization-Based Health-Conscious Predictive Energy Management Strategy for Fuel Cell Hybrid Electric Vehicles. Energies, 15(4), 1318. https://doi.org/10.3390/en15041318