
Yaw Stability Research of the Distributed Drive Electric Bus by Adaptive Fuzzy Sliding Mode Control



Abstract
:1. Introduction
2. Bus Dynamic Models
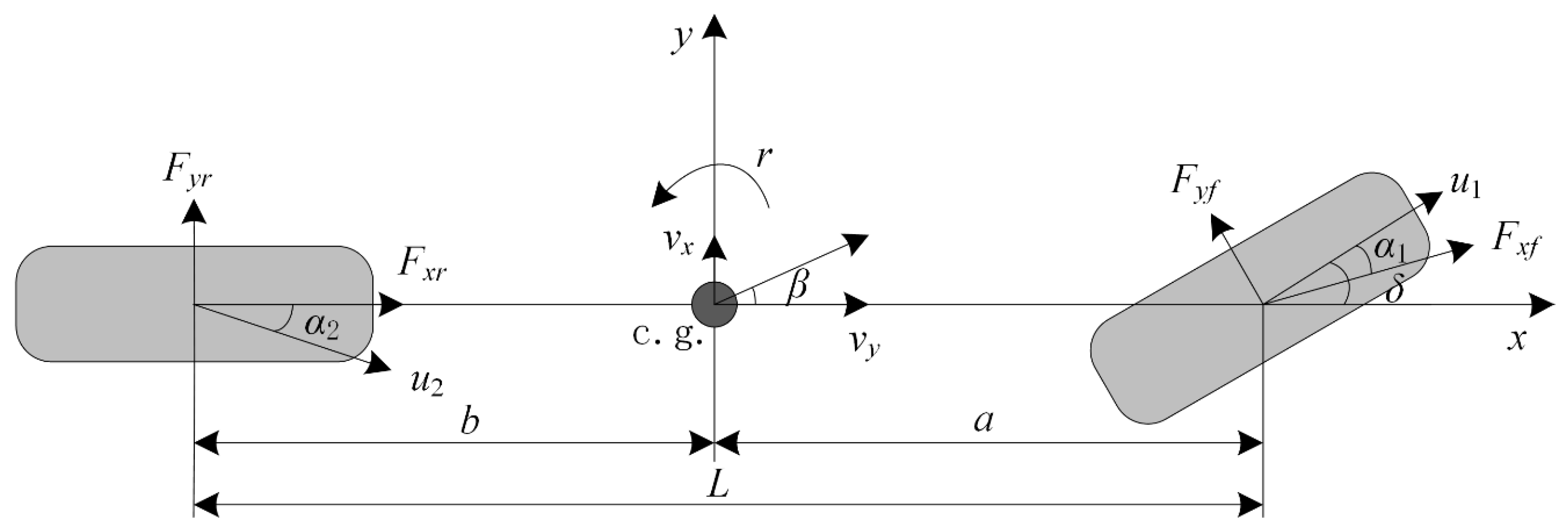
2.1. Two Degrees of Freedom Bus Model
- (1)
- The vehicle only makes plane motion.
- (2)
- The roll angle, pitch angle, and vertical displacement are all zero.
- (3)
- The longitudinal speed is constant.
- (4)
- Only the lateral and yaw motions are considered, so the influence of the shift of the longitudinal axle load is ignored.
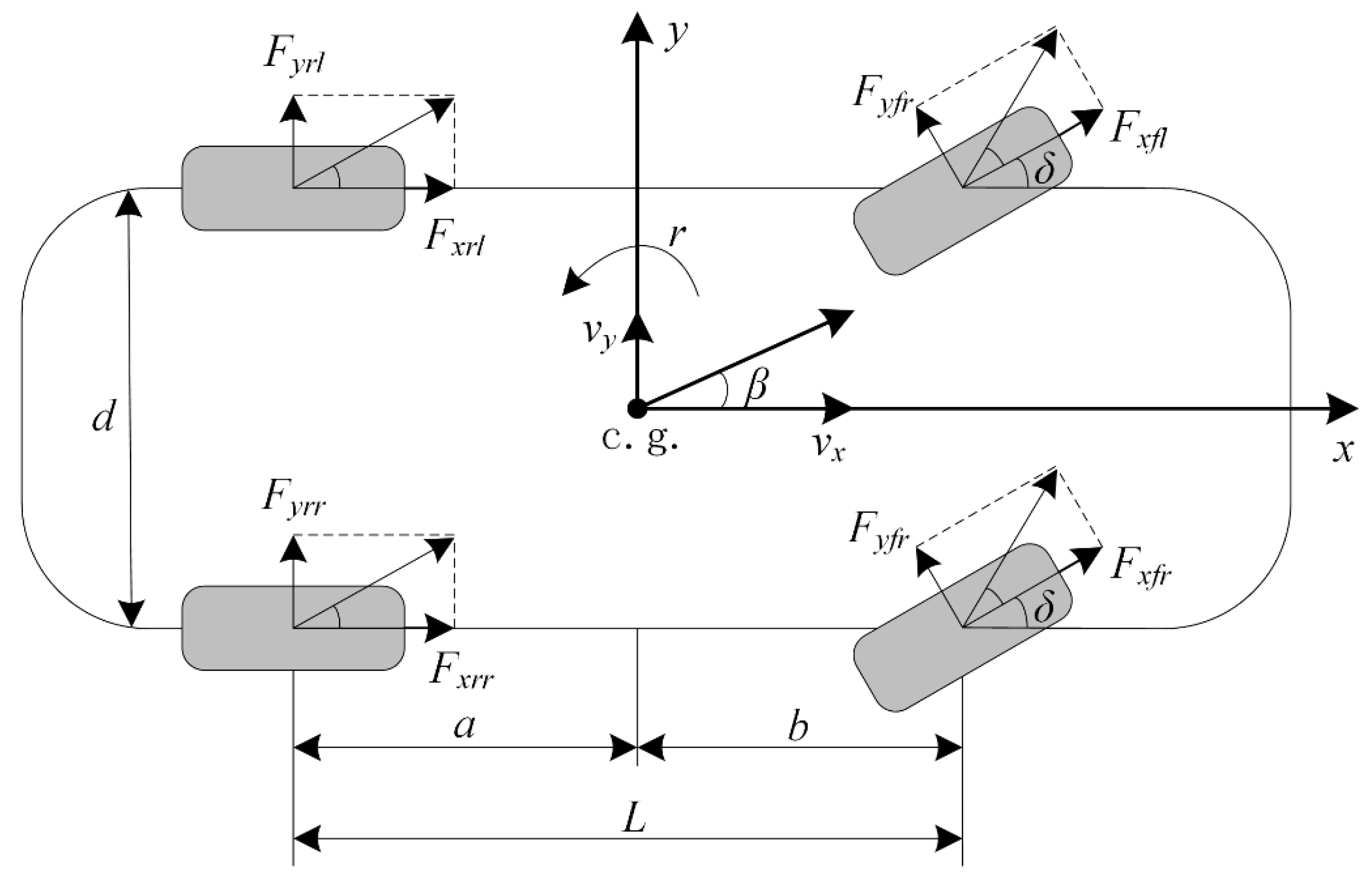
2.2. Seven Degrees of the Freedom Bus Model
- (1)
- The front and rear tires are identical.
- (2)
- The front steering wheel angles of both sides are the same when the vehicle is turning.
- (3)
- The influence of elastic damping on the transmission system is not considered.
- (4)
- The influence of factors such as torsional vibration and shimmy vibration are not considered.
- (5)
- The influence of the road slope is not considered.
- (6)
- The road surface is flat and has no influence on the vertical movement of the wheels. The wheel movement caused by the dynamic load on the road surface is ignored.
3. Controller Design
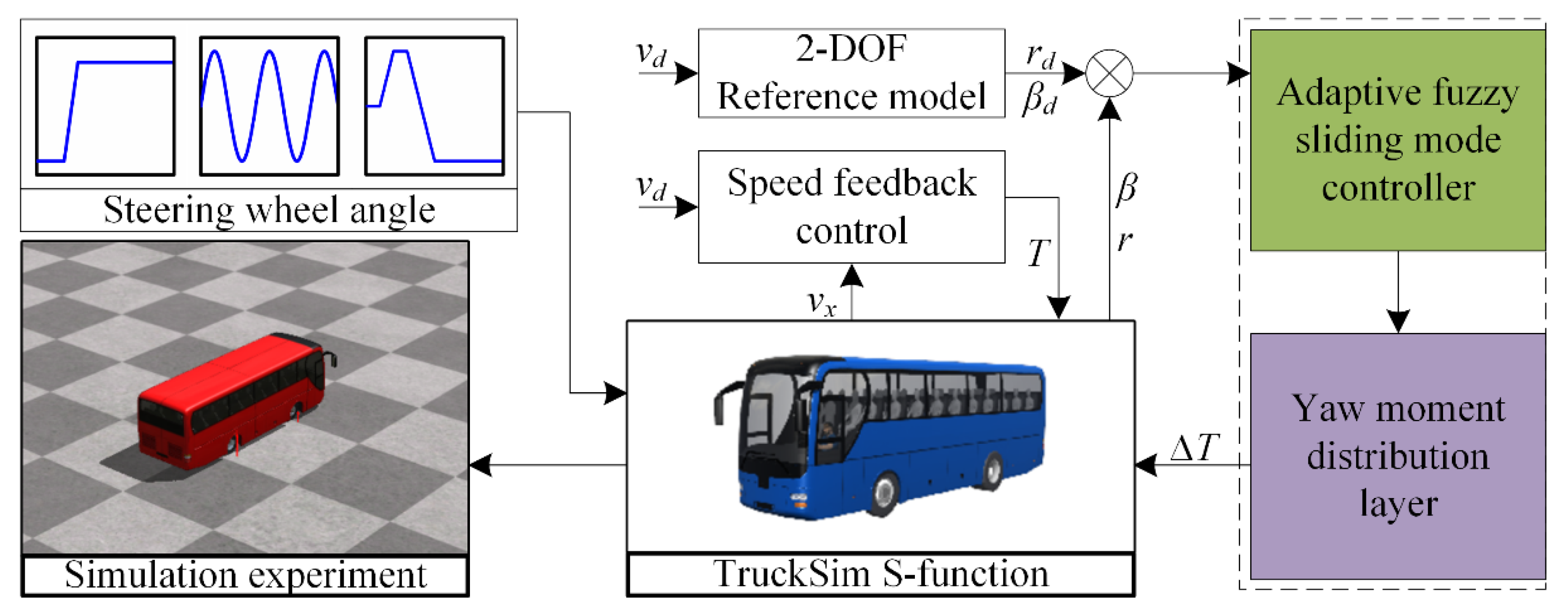
3.1. The Direct Yaw Control Structure of the Bus
3.2. Adaptive Fuzzy Sliding Mode Controller
3.2.1. Sliding Mode Controller
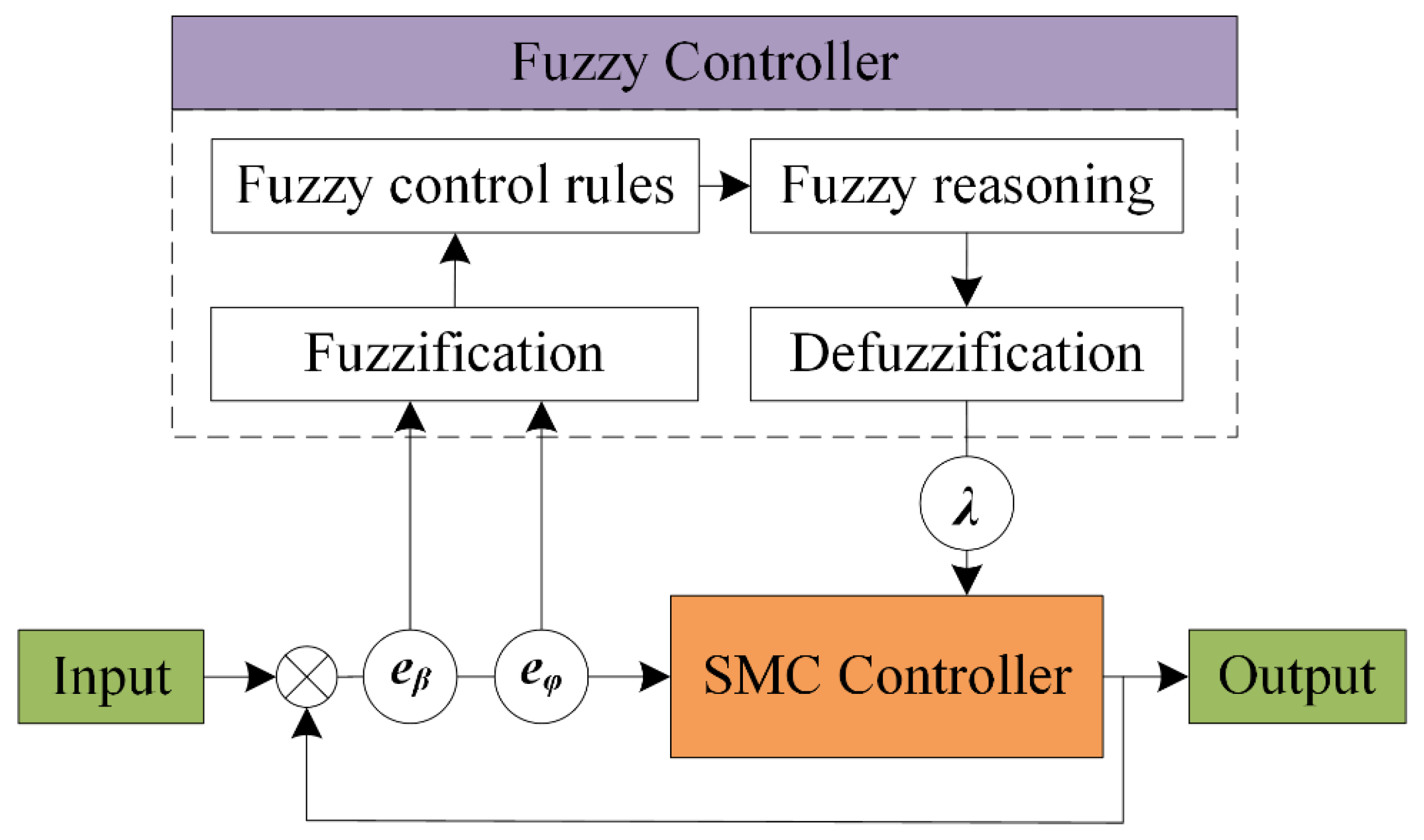
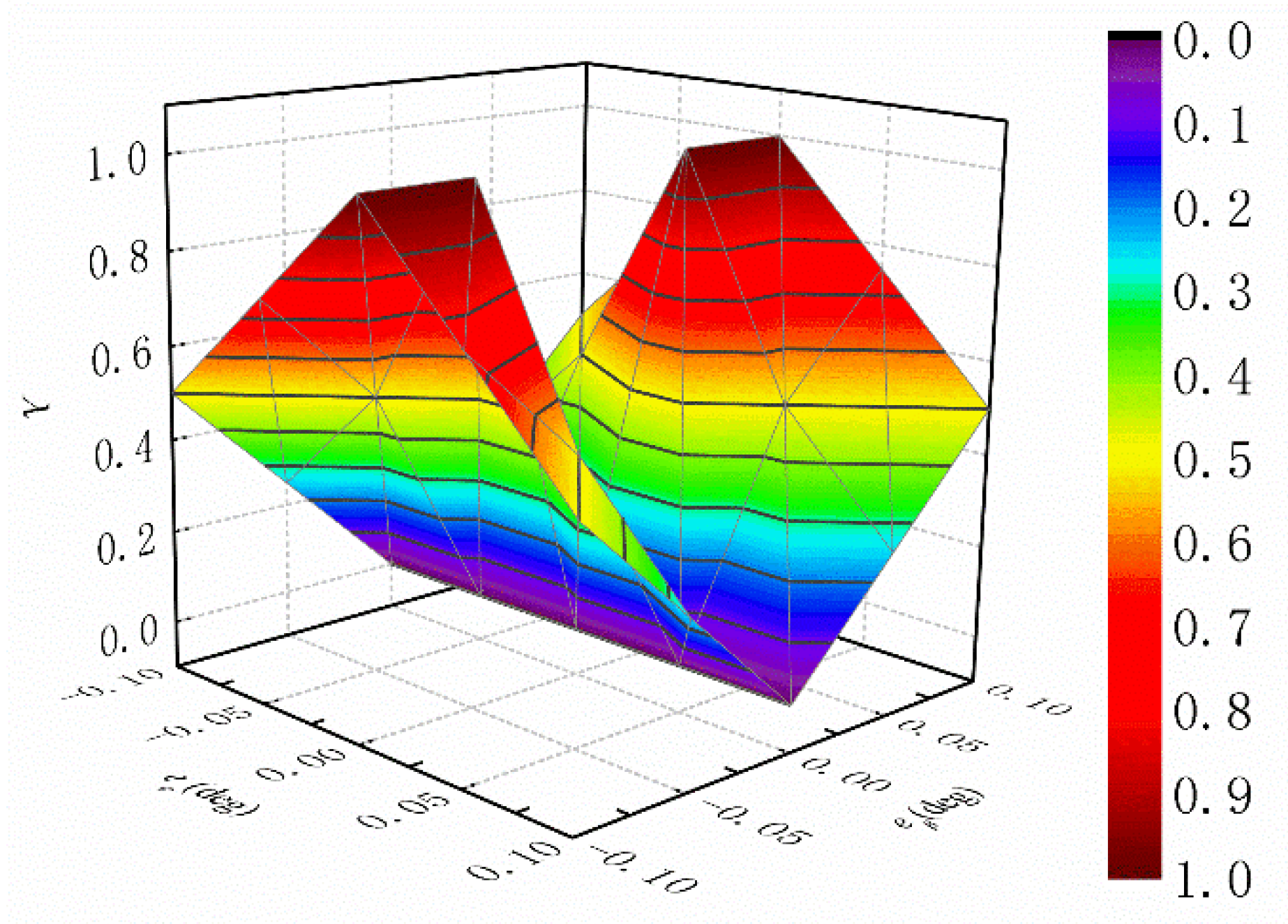
3.2.2. Fuzzy Controller
- (1)
- The quantitative domain of the tracking error of the sideslip angle is eβ = {−0.1, −0.05, 0, 0.05, 0.1}.
- (2)
- The quantitative domain of the tracking error of the yaw angle is eφ = {−0.1, −0.05, 0, 0.05, 0.1}.
- (3)
- The quantitative domain of the weight coefficient is λ = {0, 0.25, 0.5, 0.75, 1}.
3.3. Torque Distribution Controller
4. Simulation Results and Discussions
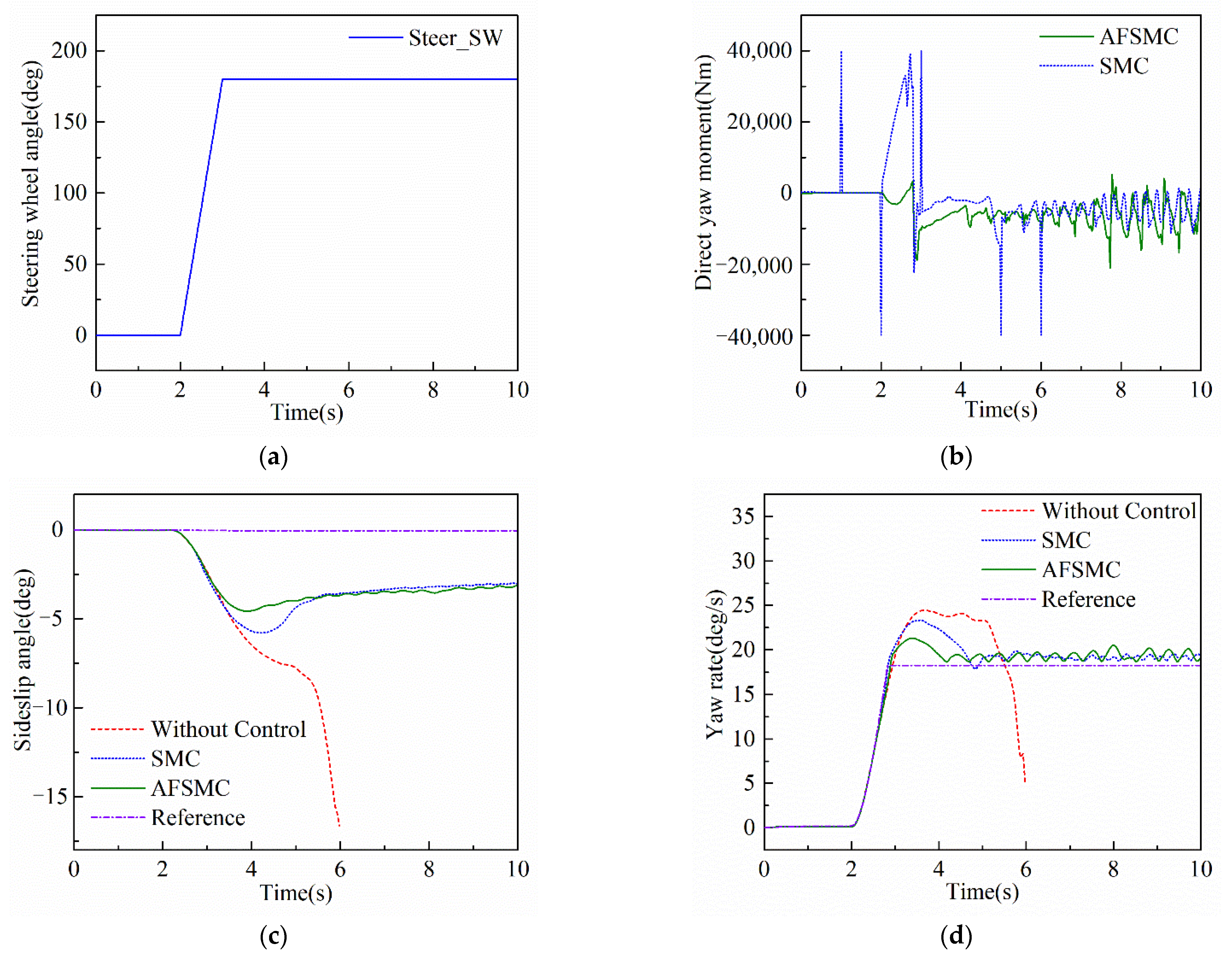
4.1. Step Response Test
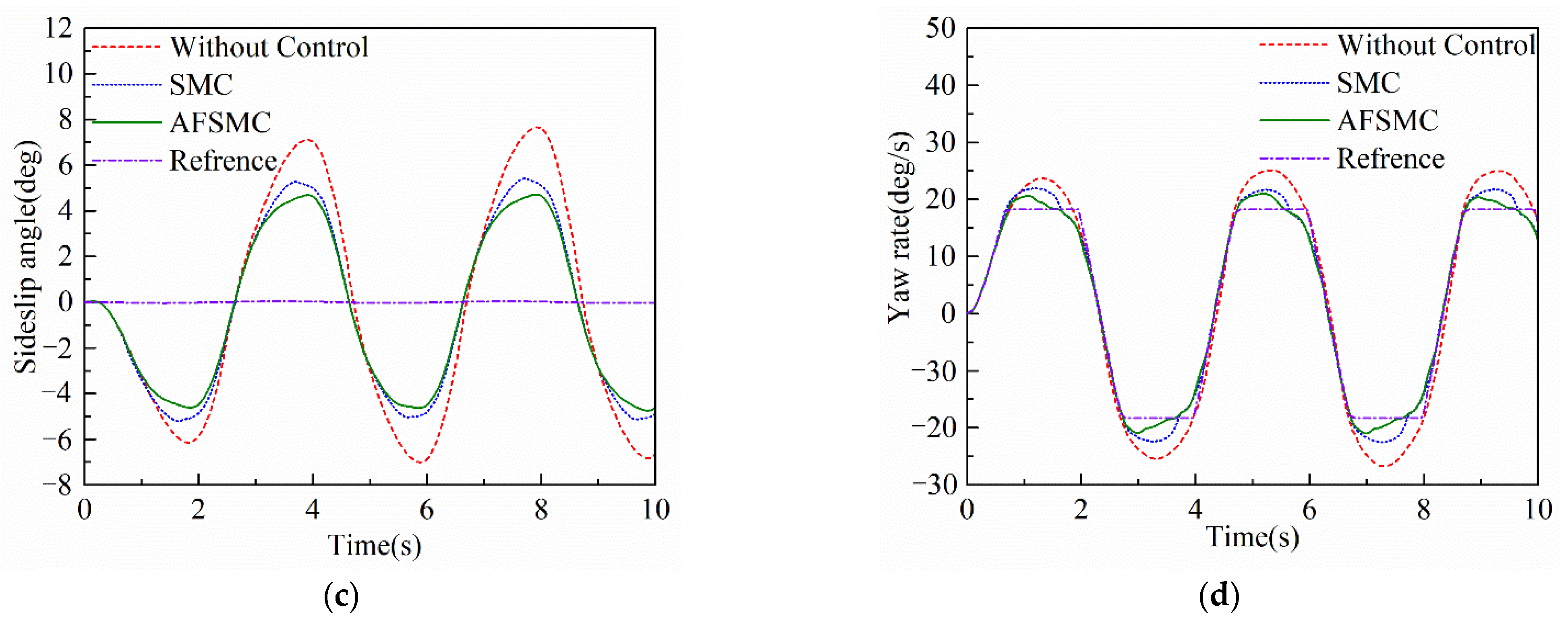
4.2. Sine Wave Response Test
4.3. Fishhook Response Test
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lin, C.-L.; Hung, H.-C.; Li, J.-C. Active control of regenerative brake for electric vehicles. Actuators 2018, 7, 84. [Google Scholar] [CrossRef] [Green Version]
- Sun, P.; Stensson Trigell, A.; Drugge, L.; Jerrelind, J. Energy-efficient direct yaw moment control for in-wheel motor electric vehicles utilising motor efficiency maps. Energies 2020, 13, 593. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Sun, Y.; Gao, Z.; Chen, L. Extension coordinated multi-objective adaptive cruise control integrated with direct yaw moment control. Actuators 2021, 10, 295. [Google Scholar] [CrossRef]
- Ahmadian, N.; Khosravi, A.; Sarhadi, P. Driver assistant yaw stability control via integration of AFS and DYC. Veh. Syst. Dyn. 2021, 1–21. [Google Scholar] [CrossRef]
- Chen, T.; Chen, L.; Xu, X.; Cai, Y.; Jiang, H.; Sun, X. Passive fault-tolerant path following control of autonomous distributed drive electric vehicle considering steering system fault. Mech. Syst. Signal Processing 2019, 123, 298–315. [Google Scholar] [CrossRef]
- Chen, T.; Xu, X.; Chen, L.; Jiang, H.; Cai, Y.; Li, Y. Estimation of longitudinal force, lateral vehicle speed and yaw rate for four-wheel independent driven electric vehicles. Mech. Syst. Signal Processing 2018, 101, 377–388. [Google Scholar] [CrossRef]
- Guo, J.; Luo, Y.; Li, K.; Dai, Y. Coordinated path-following and direct yaw-moment control of autonomous electric vehicles with sideslip angle estimation. Mech. Syst. Signal Processing 2018, 105, 183–199. [Google Scholar] [CrossRef]
- Zhang, J.; Zhou, S.; Li, F.; Zhao, J. Integrated nonlinear robust adaptive control for active front steering and direct yaw moment control systems with uncertainty observer. Trans. Inst. Meas. Control. 2020, 42, 3267–3280. [Google Scholar] [CrossRef]
- Liu, W.; Khajepour, A.; He, H.; Wang, H.; Huang, Y. Integrated torque vectoring control for a three-axle electric bus based on holistic cornering control method. IEEE Trans. Veh. Technol. 2018, 67, 2921–2933. [Google Scholar] [CrossRef]
- Zhu, H.; Li, L.; Jin, M.; Li, H.; Song, J. Real-time yaw rate prediction based on a non-linear model and feedback compensation for vehicle dynamics control. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2013, 227, 1431–1445. [Google Scholar] [CrossRef]
- Yu, Z.; Leng, B.; Xiong, L.; Feng, Y.; Shi, F. Direct yaw moment control for distributed drive electric vehicle handling performance improvement. Chin. J. Mech. Eng. 2016, 29, 486–497. [Google Scholar] [CrossRef]
- Huang, W.; Wong, P.K.; Wong, K.I.; Vong, C.M.; Zhao, J. Adaptive neural control of vehicle yaw stability with active front steering using an improved random projection neural network. Veh. Syst. Dyn. 2019, 59, 396–414. [Google Scholar] [CrossRef]
- Swain, S.K.; Rath, J.J.; Veluvolu, K.C. Neural network based robust lateral control for an autonomous vehicle. Electronics 2021, 10, 510. [Google Scholar] [CrossRef]
- Li, B.; Du, H.; Li, W.; Zhang, B. Non-linear tyre model–based non-singular terminal sliding mode observer for vehicle velocity and side-slip angle estimation. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2018, 233, 38–54. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Wang, P.; Liu, H.; Hu, Y.; Chen, H. Coordinated longitudinal and lateral vehicle stability control based on the combined-slip tire model in the MPC framework. Mech. Syst. Signal Processing 2021, 161, 107947. [Google Scholar] [CrossRef]
- Liu, H.; Yan, S.; Shen, Y.; Li, C.; Zhang, Y.; Hussain, F. Model predictive control system based on direct yaw moment control for 4WID self-steering agriculture vehicle. Int. J. Agric. Biol. Eng. 2021, 14, 175–181. [Google Scholar] [CrossRef]
- Shi, K.; Yuan, X.; Huang, G.; He, Q. MPC-based compensation control system for the yaw stability of distributed drive electric vehicle. Int. J. Syst. Sci. 2018, 49, 1795–1808. [Google Scholar] [CrossRef]
- Hou, R.; Zhai, L.; Sun, T.; Hou, Y.; Hu, G. Steering stability control of a four in-wheel motor drive electric vehicle on a road with varying adhesion coefficient. IEEE Access 2019, 7, 32617–32627. [Google Scholar] [CrossRef]
- Kim, J.; Park, C.; Hwang, S.; Hori, Y.; Kim, H. Control algorithm for an independent motor-drive vehicle. IEEE Trans. Veh. Technol. 2010, 59, 3213–3222. [Google Scholar] [CrossRef]
- Ding, S.; Liu, L.; Zheng, W.X. Sliding mode direct yaw-moment control design for in-wheel electric vehicles. IEEE Trans. Ind. Electron. 2017, 64, 6752–6762. [Google Scholar] [CrossRef]
- Tota, A.; Lenzo, B.; Lu, Q. On the experimental analysis of integral sliding modes for yaw rate and sideslip control of an electric vehicle with multiple motors. Int. J. Automot. Technol. 2018, 19, 811–823. [Google Scholar] [CrossRef]
- Guo, N.; Zhang, X.; Zou, Y.; Lenzo, B.; Du, G.; Zhang, T. A supervisory control strategy of distributed drive electric vehicles for coordinating handling, lateral stability, and energy efficiency. IEEE Trans. Transp. Electrif. 2021, 7, 2488–2504. [Google Scholar] [CrossRef]
- Mousavinejad, E.; Han, Q.-L.; Yang, F.; Zhu, Y.; Vlacic, L. Integrated control of ground vehicles dynamics via advanced terminal sliding mode control. Veh. Syst. Dyn. 2016, 55, 268–294. [Google Scholar] [CrossRef]
- Du, L.; Ji, J.; Zhang, D.; Zheng, H.; Chen, W. A fuzzy drive strategy for an intelligent vehicle controller unit integrated with connected data. Machines 2021, 9, 215. [Google Scholar] [CrossRef]
- Zhang, S.; Chen, Y.; Zhang, W. Spatiotemporal fuzzy-graph convolutional network model with dynamic feature encoding for traffic forecasting. Knowl. Based Syst. 2021, 231, 107403. [Google Scholar] [CrossRef]
- Pu, Z.; Cui, Z.; Tang, J.; Wang, S.; Wang, Y. Multi-modal traffic speed monitoring: A real-time system based on passive Wi-Fi and bluetooth sensing technology. IEEE Internet Things J. 2021, 1-1. [Google Scholar] [CrossRef]
- Qi, W.; Maseleno, A.; Yuan, X.; Balas, V.E. Fuzzy control strategy of pure electric vehicle based on driving intention recognition. J. Intell. Fuzzy Syst. 2020, 39, 5131–5139. [Google Scholar] [CrossRef]
- Sun, X.; Wang, Y.; Cai, Y.; Wong, P.K.; Chen, L. An adaptive nonsingular fast terminal sliding mode control for yaw stability control of bus based on STI tire model. Chin. J. Mech. Eng. 2021, 34, 1–14. [Google Scholar] [CrossRef]
- Asiabar, A.N.; Kazemi, R. A direct yaw moment controller for a four in-wheel motor drive electric vehicle using adaptive sliding mode control. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2019, 233, 549–567. [Google Scholar] [CrossRef]
- Fu, C.; Hoseinnezhad, R.; Li, K.; Hu, M. A novel adaptive sliding mode control approach for electric vehicle direct yaw-moment control. Adv. Mech. Eng. 2018, 10, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Liang, J.; Jiang, H.; Cai, Y.; Xu, X. Stability research of distributed drive electric vehicle by adaptive direct yaw moment control. IEEE Access 2019, 7, 106225–106237. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbols | Values |
|---|---|---|
| Bus mass | m | 7620 kg |
| Distance from the center of mass to the front axle | a | 3105 mm |
| Distance from the center of mass to the rear axle | b | 1385 mm |
| Cornering stiffness of the front tire | k1 | −140,550 N/rad |
| Cornering stiffness of the rear tire | k2 | −140,550 N/rad |
| Yaw moment of inertia | IZ | 30,782.4 kg·m2 |
| Wheelbase | d | 2030 mm |
| Height of the center of mass | hg | 1200 mm |
| Wheel radius | Re | 510 mm |
| λ | eβ | |||||
|---|---|---|---|---|---|---|
| NB | NS | ZO | PS | PB | ||
| eφ | NB | ZO | PS | PB | PS | ZO |
| NS | NS | ZO | PB | ZO | NS | |
| ZO | NB | NB | NB | NB | NB | |
| PS | NS | ZO | PB | ZO | NS | |
| PB | ZO | PS | PB | PS | ZO | |
| Parameter | Simulation Test | SMC | AFSMC | Reduce |
|---|---|---|---|---|
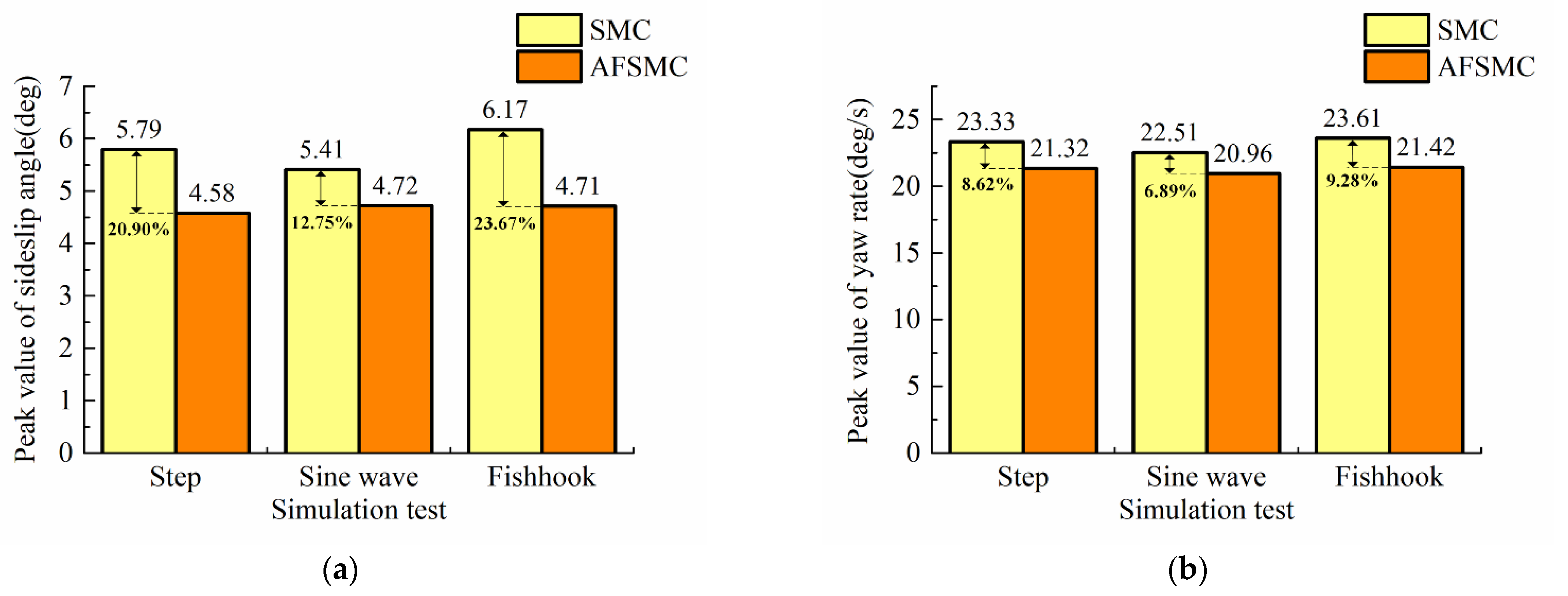
| Sideslip angle (deg) | Step | 5.79 | 4.58 | 20.90% |
| Sine wave | 5.41 | 4.72 | 12.75% | |
| Fishhook | 6.17 | 4.71 | 23.67% | |
| Yaw rate (deg/s) | Step | 23.33 | 21.32 | 8.62% |
| Sine wave | 22.51 | 20.96 | 6.89% | |
| Fishhook | 23.61 | 21.42 | 9.28% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, J.; Zou, T.; Zhang, F.; Zhang, Y. Yaw Stability Research of the Distributed Drive Electric Bus by Adaptive Fuzzy Sliding Mode Control. Energies 2022, 15, 1280. https://doi.org/10.3390/en15041280
Lin J, Zou T, Zhang F, Zhang Y. Yaw Stability Research of the Distributed Drive Electric Bus by Adaptive Fuzzy Sliding Mode Control. Energies. 2022; 15(4):1280. https://doi.org/10.3390/en15041280
Chicago/Turabian StyleLin, Jiming, Teng Zou, Feng Zhang, and Yong Zhang. 2022. "Yaw Stability Research of the Distributed Drive Electric Bus by Adaptive Fuzzy Sliding Mode Control" Energies 15, no. 4: 1280. https://doi.org/10.3390/en15041280
APA StyleLin, J., Zou, T., Zhang, F., & Zhang, Y. (2022). Yaw Stability Research of the Distributed Drive Electric Bus by Adaptive Fuzzy Sliding Mode Control. Energies, 15(4), 1280. https://doi.org/10.3390/en15041280