
Optimized EMS and a Comparative Study of Hybrid Hydrogen Fuel Cell/Battery Vehicles



Abstract
:1. Introduction
2. Formulation of the Optimization Problem
2.1. Overall Multi-Criteria Optimization Formulation
2.2. The Constraints
2.3. The Optimization Criteria
2.4. Hydrogen Consumption and Overall Efficiency
2.5. Global Optimization
3. Modeling of the Hydrogen Fuel Cell/Battery Hybrid Vehicle
3.1. The Static Model of PEMFC
3.2. The Energy Storage Element
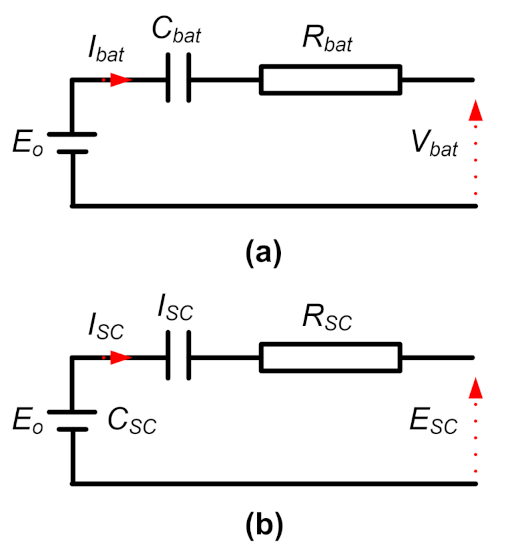
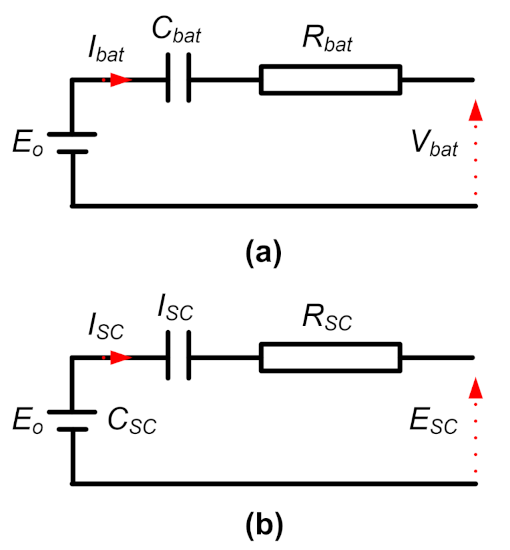
3.2.1. The Battery Model
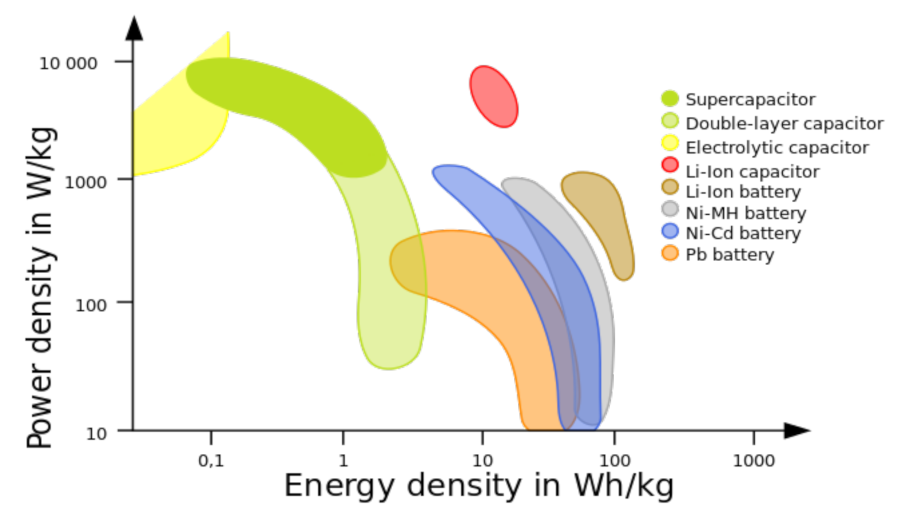
3.2.2. The Supercapacitor
3.3. DC/AC and DC/DC Converter Models
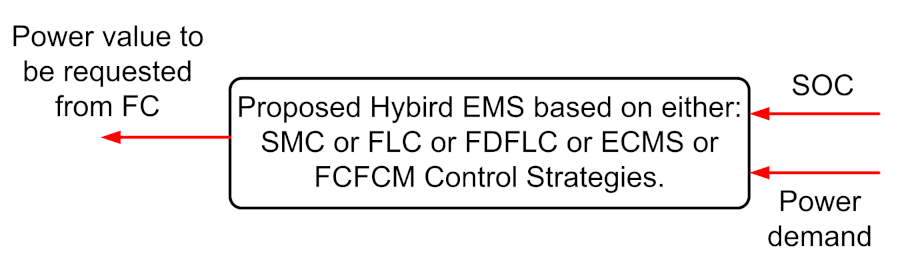
4. Hybrid System Energy Management Algorithms
4.1. EMS Based on the State Machine Strategy
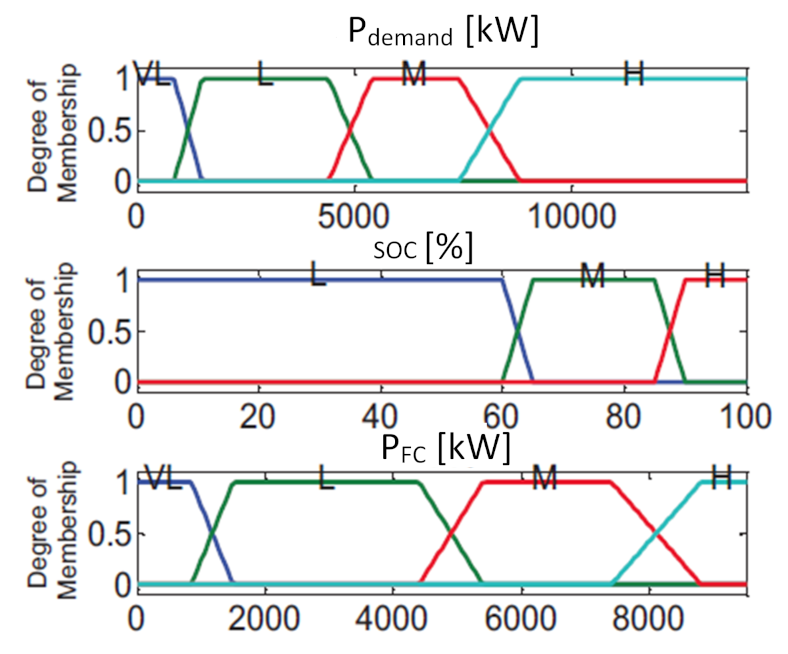
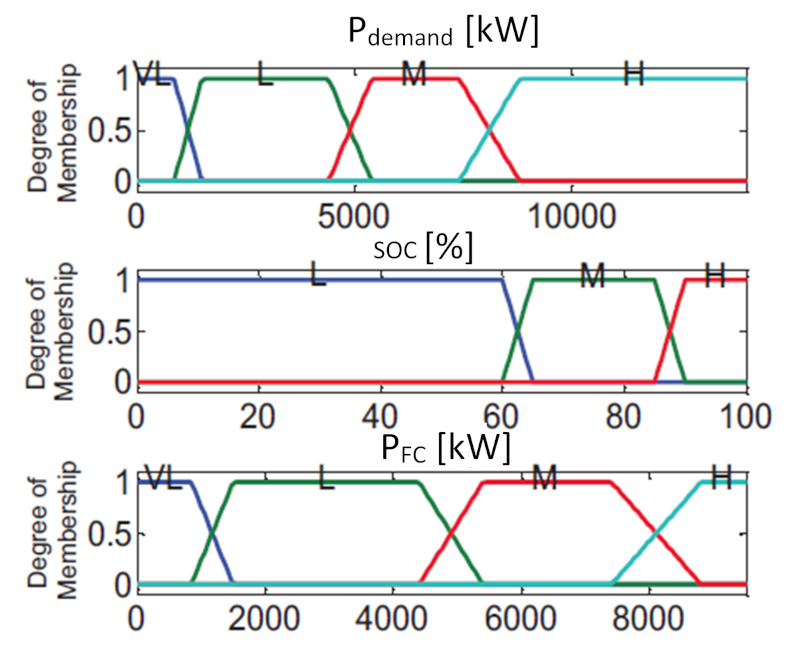
4.2. EMS Based on Fuzzy Logic Rules
4.3. Strategy Based on Frequency Decoupling and Fuzzy Logic Control
4.4. Strategy Based in the Minimization of the Equivalent Consumption
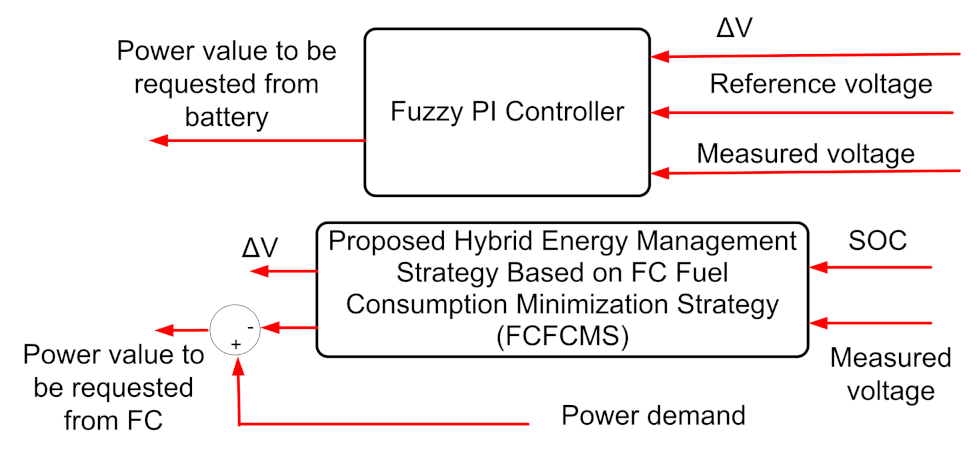
4.5. Proposed FC Fuel Consumption Minimization Strategy
4.6. FC Fuel Consumption Minimization Based on Offline Optimization
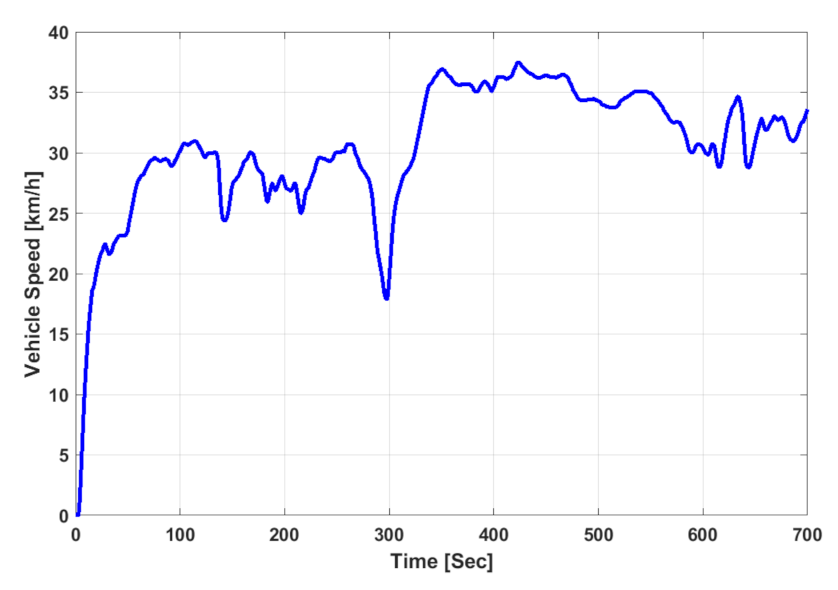
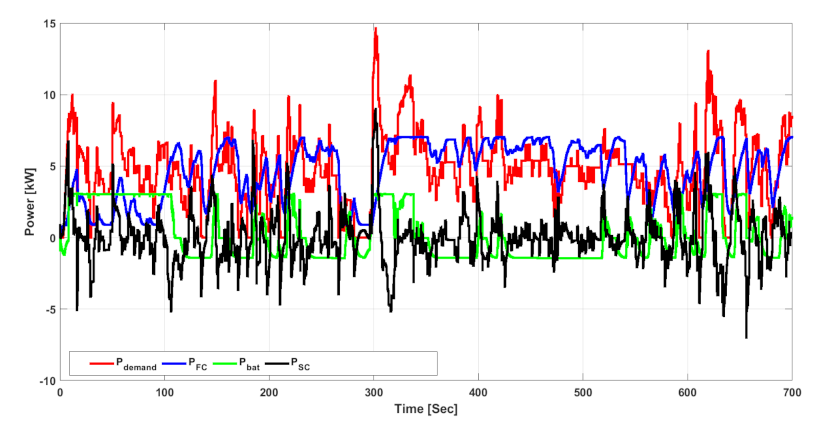
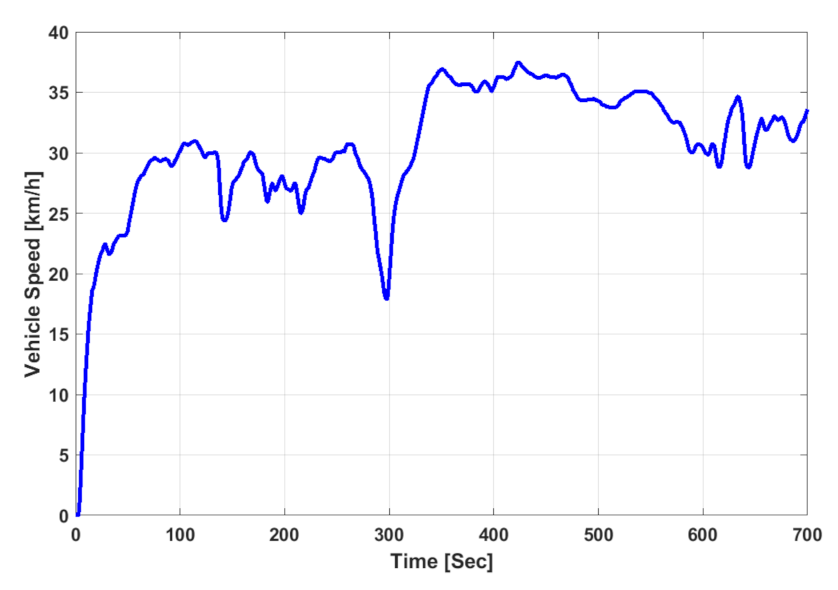
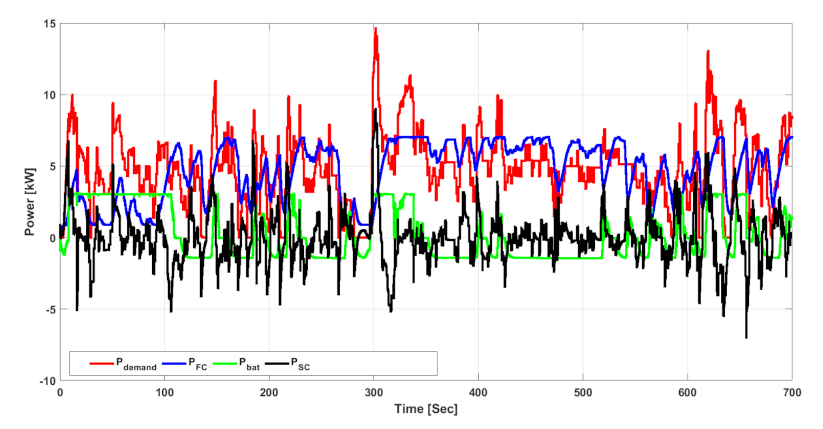
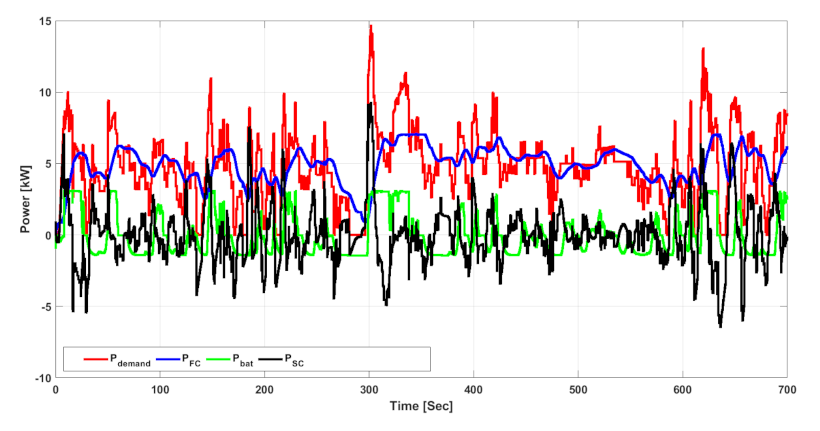
5. Simulation and Validation Results
Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| HFC | Hydrogen-powered Fuel Cell |
| FC | Fuel Cell |
| HEVs | Hybrid Electric Vehicles |
| ICE | Internal Combustion Engine |
| ESS | Energy Storage System |
| SOC | State Of Charge |
| CD/CS | Charge Depleting/Charge Sustaining |
| GIS | Geographical Information System |
| EMS | Energy Management Strategy |
| NN | Neural Network |
| MPC | Model Predictive Control |
| PMP | Pontryagin Minimum Principle |
| ECMS | Equivalent Fuel Consumption Minimization |
| SE | Storage Element |
| FCS | Fuel Cell System |
| EM | Electric Motor |
| PEMFC | Proton Exchange Membrane Fuel Cells |
| HP | Hydraulic Pump |
| HM | Hydraulic Motor |
| SMC | State Machine Strategy |
| FLC | Fuzzy Logic Control |
| FDFLC | Frequency Decoupling (FD) and FLC |
| FCFCMS | FC Fuel Consumption Minimization Strategy |
| UDDS | Urban Dynamometer Driving Schedule |
References
- Hwang, H.-Y. Developing Equivalent Consumption Minimization Strategy for Advanced Hybrid System-II Electric Vehicles. Energies 2020, 13, 2033. [Google Scholar] [CrossRef]
- Khan, M.J.; Iqbal, M.T. Dynamic Modelling and Simulation of a Fuel Cell Generator, Fuel Cells Special Issue: Modelling of Fuel Cell Systems. Fuel Cells 2005, 5, 97–104. [Google Scholar] [CrossRef]
- He, Y.; Miao, C.; Wu, J.; Zheng, X.; Liu, X.; Han, F. Research on the Power Distribution Method for Hybrid Power System in the Fuel Cell Vehicle. Energies 2021, 14, 734. [Google Scholar] [CrossRef]
- Fueling the Future Hydrogen Fuel Cell Vehicles in the 21st Century. Available online: http://serc.berkeley (accessed on 1 January 2021).
- Chan, C.C.; Bouscayrol, A.; Chen, C.K. Electric, hybrid and fuel cell vehicles: Architectures and modelling. IEEE Trans. Veh. Technol. 2010, 59, 589–598. [Google Scholar] [CrossRef]
- Neffati, A. Stratégies de Gestion de l. Énergie Électrique d’un Système Multi-Source: Décision Optimisée pour véHicule éLectrique Hybride. Ph.D. Thesis, Université de Toulouse III Paul Sabatier, Toulouse, France, 2013. [Google Scholar]
- Hajimiri, M.H.; Salmasi, F.R. A Fuzzy Energy Management Strategy for Series Hybrid Electric Vehicle with Predictive Control and Durability Extension of the Battery. In Proceedings of the IEEE Conference on Electric and Hybrid Vehicles, Pune, India, 18–20 December 2006; pp. 1–5. [Google Scholar]
- Stockar, S.; Marano, V.; Canova, M.; Rizzoni, G.; Guzzella, L. Energy-optimal control of plug-in hybrid electric vehicles for real-world driving cycles. IEEE Trans. Veh. Technol. 2011, 60, 2949–2962. [Google Scholar] [CrossRef]
- Wai, R.-J.; Jhung, S.-J.; Liaw, J.-J.; Chang, Y.-R. Intelligent Optimal Energy Management System for Hybrid Power Sources Including Fuel Cell and Battery. IEEE Trans. Power Electron. 2013, 28, 3231–3244. [Google Scholar] [CrossRef]
- Gonder, J.; Markel, T. Energy Management Strategies for Plug-In Hybrid Electric Vehicles. In Proceedings of the SAE World Congress, Detroit, MI, USA, 16–19 April 2007; pp. 1–5. [Google Scholar]
- Gong, Q.; Li, Y.; Peng, Z.-R. Trip-Based Optimal Power Management of Plug-in Hybrid Electric Vehicles. IEEE Trans. Veh. Technol. 2008, 57, 3393–3401. [Google Scholar] [CrossRef]
- Wu, G.; Boriboonsomsin, K.; Barth, M.J. Development and Evaluation of an Intelligent Energy-Management Strategy for Plug-in Hybrid Electric Vehicles. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1091–1100. [Google Scholar] [CrossRef]
- Silva, C.; Ross, M.; Farias, T. Evaluation of energy consumption, emissions and cost of plug-in hybrid vehicles. Energy Convers. Manag. 2009, 50, 1635–1643. [Google Scholar] [CrossRef]
- Lin, C.-C.; Peng, H.; Jeon, S.; Lee, J.M. Control of a Hybrid Electric Truck Based on Driving Pattern Recognition. In Proceedings of the 2002 Advanced Vehicle Control Conference, Hiroshima, Japan, 9–13 September 2002. [Google Scholar]
- Ravey, A.; Blunier, B.; Lukic, S.; Miraoui, A. Control strategy of fuel cell hybrid electric vehicle based on driving cycle recognition. In Proceedings of the 2012 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 18–20 June 2012; pp. 1–5. [Google Scholar]
- Recognition, R. Energy Management, and Plughybrid Electric Vehicles. Chalmers Publication Library Benefit of Route Recognition in Energy Management of Plug-In Hybrid Electric Vehicles. In Proceedings of the 2012 American Control Conference (ACC), Montréal, CA, USA, 27–29 June 2012. [Google Scholar]
- Johannesson, L.; Asbogard, M.; Egardt, B. Assessing the Potential of Predictive Control for Hybrid Vehicle Powertrains Using Stochastic Dynamic Programming. IEEE Trans. Intell. Transp. Syst. 2007, 8, 71–83. [Google Scholar] [CrossRef]
- Serrao, L.; Onori, S.; Rizzoni, G. A comparative analysis of energy management strategies for hybrid electric vehicles. J. Dyn. Syst. Meas. Control. 2011, 133, 031012. [Google Scholar] [CrossRef] [Green Version]
- Souffran, F.; Miegeville, L.; Guerin, P. Simulation of RealWorld Vehicle Missions Using a Stochastic Marcov Model for Optimal Design Purposes. In Proceedings of the IEEE Vehicular Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011; pp. 1–6. [Google Scholar]
- Martinez, C.M.; Hu, X.; Cao, D.; Velenis, E.; Gao, B.; Wellers, M. Energy Management in Plug-in Hybrid Electric Vehicles: Recent Progress and a Connected Vehicles Perspective. IEEE Trans. Veh. Technol. 2016, 66, 4534–4549. [Google Scholar] [CrossRef] [Green Version]
- Manzie, C.; Watson, H.; Halgamuge, S. Fuel economy improvements for urban driving: Hybrid vs. intelligent vehicles. Transp. Res. Part Emerg. Technol. 2007, 15, 1–16. [Google Scholar] [CrossRef]
- Murphey, Y.L. Intelligent Vehicle Power Management: An Overview. In Computational Intelligence in Automotive Applications; Springer: Berlin/Heidelberg, Germany, 2008; Volume 190, pp. 169–190. [Google Scholar]
- Zhang, P.; Yan, F.; Du, C. A comprehensive analysis of energy management strategies for hybrid electric vehicles based on bibliometrics. Renew. Sustain. Energy Rev. 2015, 48, 88–104. [Google Scholar] [CrossRef]
- Kamal, E.; Adouane, L. Intelligent Energy Management Strategy Based on Artificial Neural Fuzzy for Hybrid Vehicle. IEEE Trans. Intell. Veh. 2017, 3, 112–125. [Google Scholar] [CrossRef]
- Kamal, E.; Adouane, L. Hierarchical energy optimization strategy and its integrated reliable battery fault management for hybrid hydraulicelectric vehicle. IEEE Trans. Veh. Technol. 2018, 67, 3740–3754. [Google Scholar] [CrossRef]
- Philippe, C.; Adouane, L.; Thuilot, B.; Tsourdos, A.; Shin, H.-S. Safe and online MPC for managing safety and comfort of autonomous vehicles in urban environment. In Proceedings of the 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 300–306. [Google Scholar]
- Ouddah, N.; Adouane, L.; Abdrakhmanov, R.; Kamal, E. Optimal energy management strategy of plug-in hybrid electric bus in urban conditions. In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics, Madrid, Spain, 26–28 July 2017; pp. 304–311. [Google Scholar]
- Kim, K.; Jeong, J.; Min, S.; Yang, H.; Vijayagopal, R.; Rousseau, A.; Cha, S.W. A Component-Sizing Methodology for a Hybrid Electric Vehicle Using an Optimization Algorithm. Energies 2021, 14, 3147. [Google Scholar] [CrossRef]
- Ouddah, N.; Adouane, L.; Abdrakhmanov, R. From offline to adaptive online energy management strategy of hybrid vehicle using Pontryagin’s minimum principle. Int. J. Autom. Technol. 2018, 19, 571–584. [Google Scholar] [CrossRef]
- Volkan, S.; Metin, G.; Seta, B. A novel ECMS and combined cost map approach for high-efficiency series hybrid electric vehicles. IEEE Trans. Veh. Technol. 2011, 60, 3557–3570. [Google Scholar]
- García, P.; Torreglosa, J.P.; Fernandez, L.M.; Jurado, F. Viability study of a FC-battery-SC tramway controlled by equivalent consumption minimization strategy. Int. J. Hydrogen Energy 2012, 37, 9368–9382. [Google Scholar] [CrossRef]
- Torreglosa, J.P.; Jurado, F.; García, P.; Fernández, L.M. Hybrid fuel cell and battery tramway control based on an equivalent consumption minimization strategy. Control Eng. Pract. 2011, 19, 1182–1194. [Google Scholar] [CrossRef]
- Rodatz, P.; Paganelli, G.; Sciarretta, A.; Guzzella, L. Optimal power management of an experimental fuel cell/supercapacitor-powered hybrid vehicle. Control Eng. Pract. 2005, 13, 41–53. [Google Scholar] [CrossRef]
- Kwon, L.; Cho, D.-S.; Ahn, C. Degradation-Conscious Equivalent Consumption Minimization Strategy for a Fuel Cell Hybrid System. Energies 2021, 14, 3810. [Google Scholar] [CrossRef]
- Abdrakhmanov, R.; Adouane, L. Dynamic programming resolution and database knowledge for online predictive energy management of hybrid vehicles. In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics, Madrid, Spain, 26–28 July 2017; pp. 132–143. [Google Scholar]
- Govardhan, O.M. Fundamentals and Classification of Hybrid Electric Vehicles. Int. J. Eng. Tech. 2017, 3, 194–198. [Google Scholar]
- Zheng, C.H.; Oh, C.E.; Park, Y.I.; Lim, W.S.; Xu, G. PMP-Based Power Management Strategy of Fuel Cell Hybrid Vehicles Considering Multi-Objective Optimization. Int. J. Precis. Eng. Manuf. 2013, 14, 845–853. [Google Scholar] [CrossRef]
- Li, C.Y.; Liu, G.P. Optimal fuzzy power control and management of fuel cell/battery hybrid vehicles. J. Power Sources 2009, 192, 525–533. [Google Scholar] [CrossRef]
- Zheng, C.H.; Kim, N.W.; Park, Y.I.; Lim, W.S.; Xu, G. The effect of battery temperature on total fuel consumption of fuel cell hybrid vehicles. Int. J. Hydrogen Energy 2013, 38, 5192–5200. [Google Scholar] [CrossRef]
- Feroldi, D.; Serra, M.; Riera, J. Energy Management Strategies based on efficiency map for Fuel Cell Hybrid Vehicles. J. Power Sources 2009, 190, 387–401. [Google Scholar] [CrossRef] [Green Version]
- Hankache, W. Gestion Optimisée de l’Énergie Électrique d’un Groupe Électrogène Hybride à Pile à Combustible. Ph.D. Thesis, Université de Toulouse, Toulouse, France, 2008; pp. 36–41. [Google Scholar]
- Ouddah, N.; Boukhnifer, M.; Raisemche, A. Two Control Energy Management Schemes for Electrical Hybrid Vehicle. In Proceedings of the SSD Systems, Signals & Devices, Hammamet, Tunisia,, 18–21 March 2013. [Google Scholar]
- Wróblewski, P.; Drożdż, W.; Lewicki, W.; Miążek, P. Methodology for Assessing the Impact of Aperiodic Phenomena on the Energy Balance of Propulsion Engines in Vehicle Electromobility Systems for Given Areas. Energies 2021, 14, 2314. [Google Scholar] [CrossRef]
- Khan, N.J.; Iqbal, M.T. Dynamic modeling and simulation of a small wind-fuel cell hybrid energy system. Renew. Energy 2005, 30, 421–439. [Google Scholar] [CrossRef]
- Kishor, N.; Mohanty, S.R. Fuzzy modeling of fuel cell based on mutual information between variables. Int. J. Hydrogen Energy 2010, 35, 3620–3631. [Google Scholar] [CrossRef]
- Shan, Y.; Choe, S.Y. Modeling and simulation of a PEM fuel cell stack considering temperature effects. J. Power Sources 2006, 158, 274–286. [Google Scholar] [CrossRef]
- Kamal, E.; Aitouche, A. Fuzzy Observer-Based Fault Tolerant Control Against Sensor Faults for Proton Exchange Membrane Fuel Cells. Int. J. Hydrogen Energy 2020, 45, 11220–11232. [Google Scholar] [CrossRef]
- Becherif, M.; Saadi, A.; Hissel, D.; Aboubou, A.; Ayad, M.Y. Static and dynamic proton exchange membrane fuel cell models. J. Hydrocarb. Mines Environ. Res. 2011, 2, 1–9. [Google Scholar]
- Ham, S.-W.; Jo, S.-Y.; Dong, H.-W.; Jeongn, J.-W. A simplified PEM fuel cell model for building cogeneration applications. Energy Build. 2015, 107, 213–225. [Google Scholar] [CrossRef]
- Zhang, C.; Li, W.; Hu, M.; Cheng, X.; He, K.; Mao, L. A Comparative Study of Using Polarization Curve Models in Proton Exchange Membrane Fuel Cell Degradation Analysis. Energies 2020, 13, 3759. [Google Scholar] [CrossRef]
- Larminie, J.; Dicks, A. Fuel Cell Systems Explained, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2003. [Google Scholar]
- Available online: https://commons.wikimedia.org/wiki/File:Energiespeicher3.svg (accessed on 1 October 2021).
- Fernandez, L.M.; Garcia, P.; Garcia, C.A.; Jurado, F. Comparison of control schemes for a fuel cell hybrid tramway integrating two DC/DC converters. Int. J. Hydrogen Energy 2010, 35, 5731–5744. [Google Scholar] [CrossRef]
- Fernandez, L.M.; Garcia, P.; Garcia, C.A.; Jurado, F. Hybrid electric system based on fuel cell and battery and integrating a single DC/DC converter for a tramway. Energy Convers. Manag. 2011, 52, 2183–2192. [Google Scholar] [CrossRef]
- Kamal, E.; Adouane, L.; Abdrakhmanov, R.; Ouddah, N. Hierarchical and adaptive neuro-fuzzy control for intelligent energy management in hybrid electric vehicles. IFAC-PapersOnLine 2017, 50, 3014–3021. [Google Scholar] [CrossRef]
- Vural, B.; Boynuegri, A.R.; Nakirn, I.; Erdincn, O.; Balikci, A.; Uzunoglu, M.; Gorgun, H.; Dusmez, S. Fuel cell and ultra-capacitor hybridization: A prototype testbench based analysis of different energy management strategies for vehicular applications. Int. J. Hydrogen Energy 2010, 35, 11161–11171. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SOC | ||
|---|---|---|
| High | ||
| High | ||
| High | ||
| Normal | ||
| Normal | ||
| Normal | ||
| Low | ||
| Low |
| SOC | ||
|---|---|---|
| H | VL | VL |
| H | L | L |
| H | M | ML |
| H | H | H |
| M | VL | VL |
| M | L | L |
| M | M | M |
| M | H | H |
| L | VL | L |
| L | L | M |
| L | M | H |
| L | H | H |
| Design Requirements | Value |
|---|---|
| FC power [] (kW) | [1–10] |
| Energy power [] (kW) | [−1.2–4] |
| Energy SOC [] [%] | [60–90] |
| DC bus voltage [] (kW) | [250–280] |
| EMS Strategies | (%) | Consumption (g) | Overall Efficiency (%) |
|---|---|---|---|
| SMC | 59.10 | 59.10 | 85.20 |
| FLC | 62.01 | 60.92 | 84.93 |
| FDFLC | 62.50 | 61.50 | 84.09 |
| ECMS | 66.65 | 61.01 | 84.88 |
| ECMS (offline) | 66.65 | 58.20 | … |
| FCFCMS | 58.57 | 58.40 | 85.01 |
| FCFCMS (offline) | 58.57 | 57.90 | … |
| EMS Strategies | Imp | Setting | ET | Consumption | |
|---|---|---|---|---|---|
| SMC | simple | ER | L | not satisfied | M |
| FLC | DM | Comp | M | satisfied | M |
| FDFLC | DM | Comp | M | satisfied | The largest |
| ECMS | complex | DM | H | satisfied | M |
| FCFCMS | complex | DM | H | satisfied | The least |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kamal, E.; Adouane, L. Optimized EMS and a Comparative Study of Hybrid Hydrogen Fuel Cell/Battery Vehicles. Energies 2022, 15, 738. https://doi.org/10.3390/en15030738
Kamal E, Adouane L. Optimized EMS and a Comparative Study of Hybrid Hydrogen Fuel Cell/Battery Vehicles. Energies. 2022; 15(3):738. https://doi.org/10.3390/en15030738
Chicago/Turabian StyleKamal, Elkhatib, and Lounis Adouane. 2022. "Optimized EMS and a Comparative Study of Hybrid Hydrogen Fuel Cell/Battery Vehicles" Energies 15, no. 3: 738. https://doi.org/10.3390/en15030738
APA StyleKamal, E., & Adouane, L. (2022). Optimized EMS and a Comparative Study of Hybrid Hydrogen Fuel Cell/Battery Vehicles. Energies, 15(3), 738. https://doi.org/10.3390/en15030738