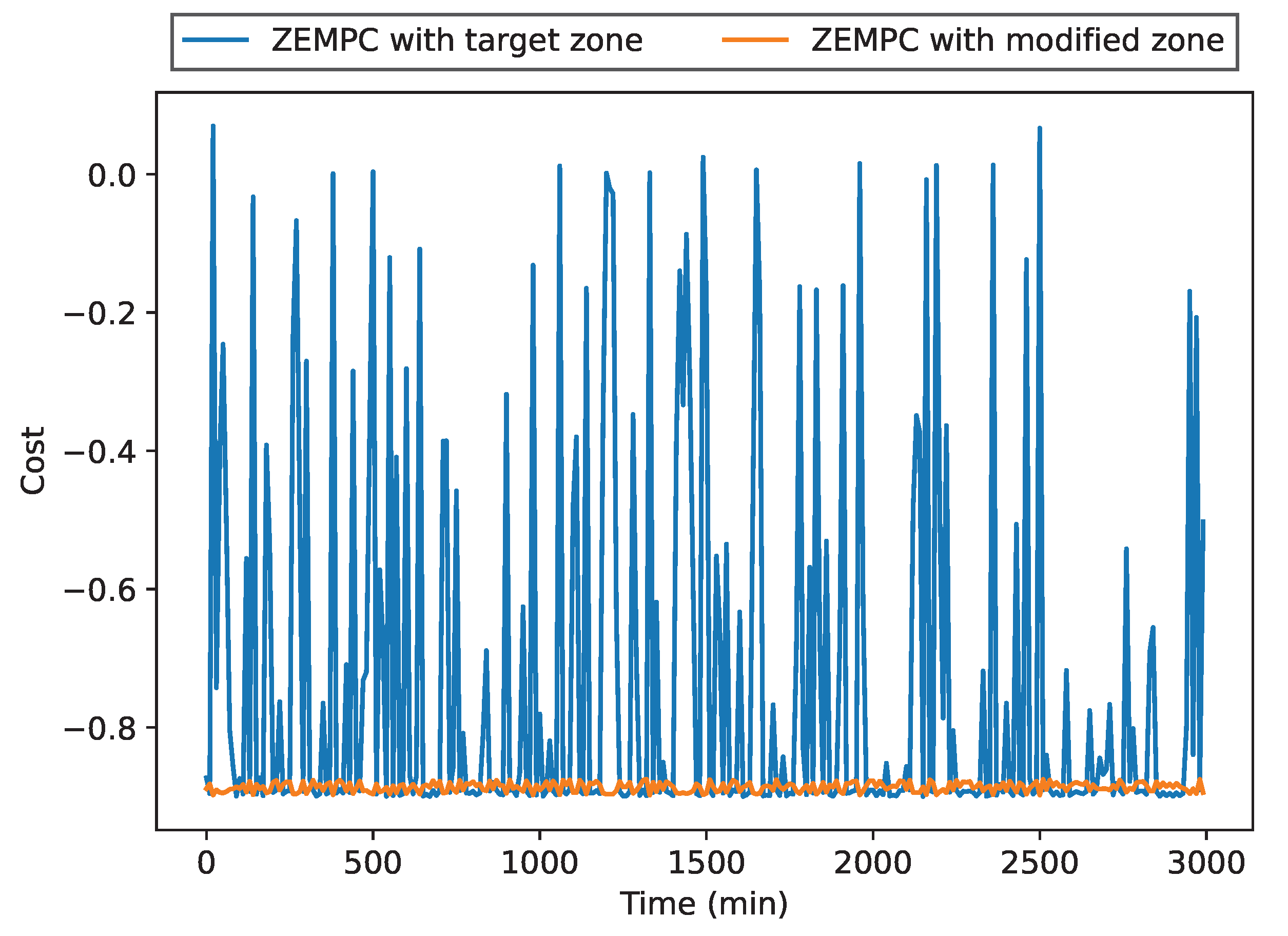
In this section, we present the economic model predictive control with zone tracking (ZEMPC) algorithm. Specifically, two variations of the ZEMPC algorithm are presented. The first control algorithm denoted as nominal ZEMPC (NZEMPC) is the economic model predictive control with target zone tracking. In this formulation, the disturbances are not considered in the design. This serves as a basis to compare the second variation of ZEMPC. In the second control algorithm denoted as robust ZEMPC (RZEMPC), the original target zone is modified to implicitly consider the effects of the uncertainty in the process system.
We begin this section by presenting the NZEMPC formulation. Thereafter, an algorithm to modify the original target zone is presented. Finally, we present the RZEMPC formulation.
3.1. Economic MPC with Target Zone Tracking
Given information about the current state
at sampling time
, the ZEMPC uses the nominal model of System (
9):
with the initial condition
to find a control sequence
and the associated state sequence
over the entire prediction horizon
N at a sampling time
to minimize the cost functional:
In Equations (
13) and (
14),
and
are the nominal state vector and computed control input vector, respectively. The stage cost
is defined as follows:
where
is the economic stage cost as introduced in (
12) and
is a zone tracking penalty term, which is defined as follows:
with
being a non-negative weight on the zone tracking term and
is a slack variable. The zone tracking stage cost reflects the distance of the system states from the target zone and is positive definite. The weights
must be appropriately selected such that the zone tracking cost is given a higher priority than the economic objective.
At each sampling time, the following dynamic optimization problem
is solved:
In the optimization problem described by Equations (
18)–(
25), Equation (
19) is the model constraint, Equation (
20) represents the output relationship, Equation (
21) is the initial state constraint, Equations (
22)–(
24) are the constraints on the state, input and output, respectively, and Equation (
25) is the zone constraint. As a result of the cost function employed, the optimization problem described by Equations (
18)–(
25) is a multi-objective optimization problem, which seeks to minimize the deviation of the absorption efficiency from the target zone
while at the same time maximizing the the efficiency within the target zone.
The solution of
denoted
gives an optimal value of the cost
and at the same time
is applied to the actual system (
9).
3.2. Modification of the Target Zone
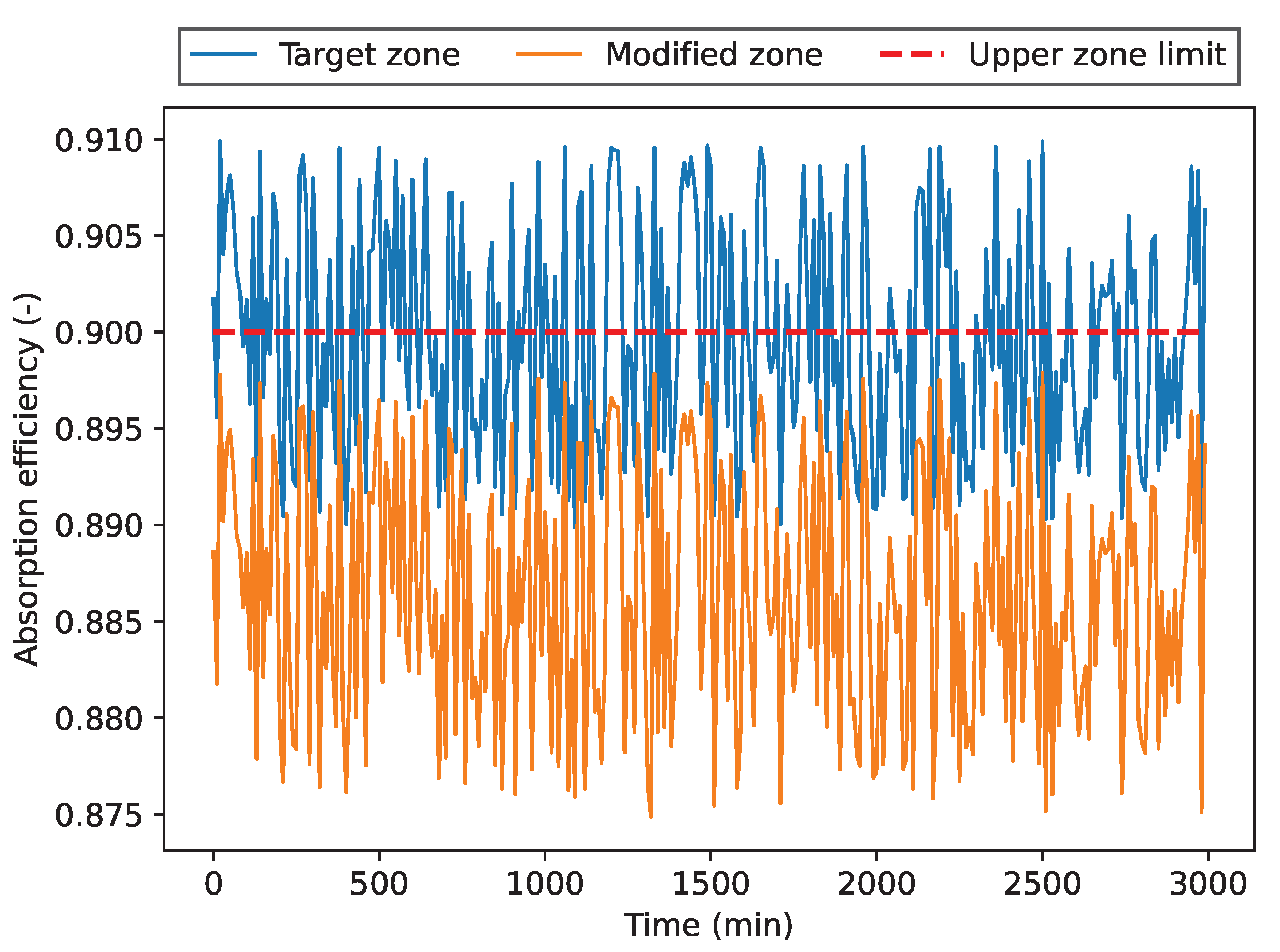
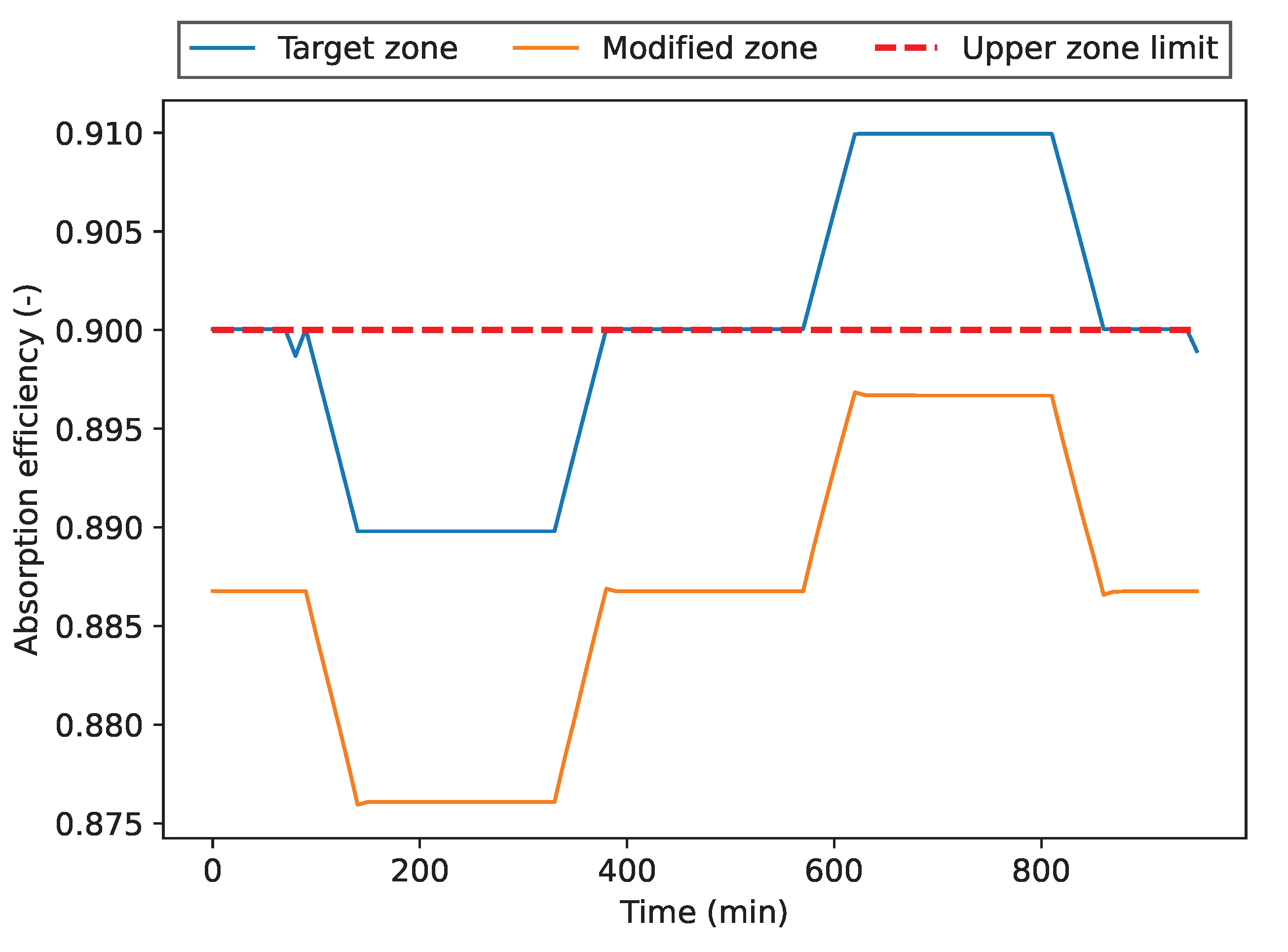
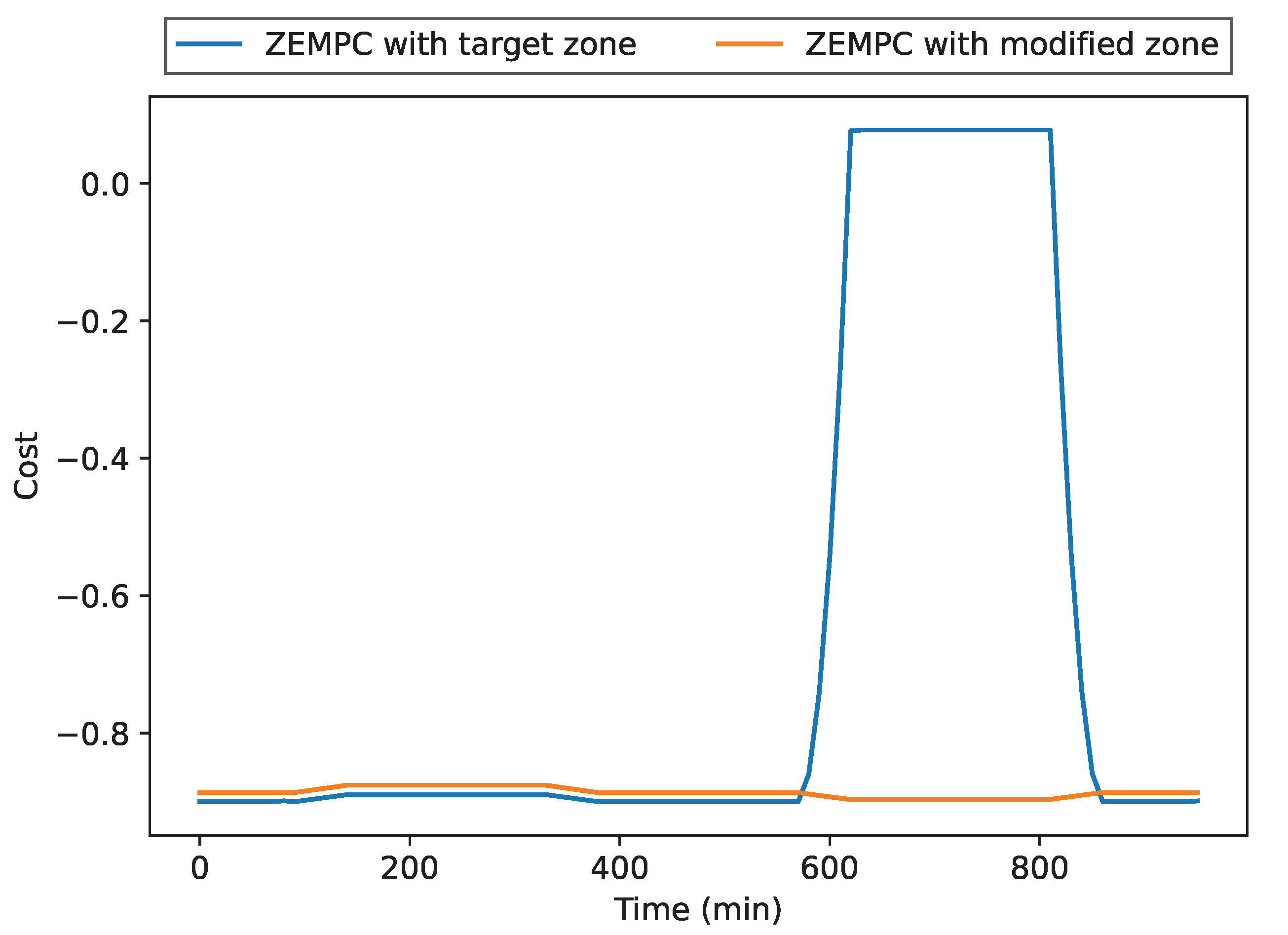
While the NZEMPC described in the earlier section ensures that the zone tracking objective is achieved for the absorption column without any uncertainty, the zone tracking objective may not be achieved in general for systems with uncertainty. This may be due to two reasons. First, the target zone may not necessarily be forward invariant for the closed-loop system. This means that it is possible for the uncertainty to drive the system’s states to a region outside the forward invariant set but within the target zone. Once the state is outside the forward invariant set, the target zone cannot be tracked anymore and will ultimately result in system instability. Second, the NZEMPC algorithm may cause the system output to operate very close to the boundary of the target zone due to the secondary economic objective employed; that is maximization of the absorption efficiency. While this may not be an issue in the nominal case, the presence of the uncertainty may drive the system states outside the target zone making it difficult to track the zone.
Therefore, to achieve the zone tracking objective in the presence of uncertainty, we modify the target zone used in the formulation of the EMPC with zone tracking algorithm. It is worth mentioning that modification of the target zone is not trivial. For example, merely tracking the center of the target zone may not be the best choice. This is demonstrated in the simulation section. The idea is to find a robust control invariant set within the target zone, which ensures that the target zone can still be tracked in the presence of the uncertainty. A robust control invariant set
R is a set of initial states in the target zone for which there exists a control action such that the trajectory of the system stays in
R for all future times irrespective of the disturbances. Ideally, the largest robust control invariant set within the target zone is desired [
24]; however, finding the largest robust control invariant sets for large scale systems is very difficult and the method proposed by Decardi-Nelson and coworkers [
24] cannot be applied to the absorption column due to the number of states involved. We therefore resort to using simpler ellipsoidal control invariant set techniques. Since the ellipsoidal control invariant set does not consider the presence of uncertainty in the control system, we use a back-off approach not only to account for the presence of disturbances but to also avoid operating close to the boundary of the target zone
.
Before we present the zone modification algorithm, let us first define the steady-state (SS) optimization problem with respect to the target zone as
In the optimization problem described by Equations (
26)–(
31), Equation (
27) is the system model defined in System (
9) without any uncertainty, and Equations (
28)–(
31) are the same as defined previously. The optimization problem described by Equations (
26)–(
31) returns the optimal economic cost
within the target zone
as well as the steady-state state
and input
. The
serves as a lower bound on the economic cost that can be achieved in the target zone
. In the proposed zone modification algorithm, this value is relaxed by multiplying it with the relaxation rate
r to obtain the relaxed optimal economic cost
. Here, relaxation of the optimal steady-state economic cost within the target zone means increasing the value of the economic cost above
such that
Relaxing the best economic cost within the target zone sacrifices some economic performance to implicitly account for the effects of the uncertainty in the control system. To achieve the relaxation, the following cost-relaxed steady-state (CRSS) optimization problem is solved
In the optimization problem described by Equations (
33)–(
38), Equation (
38) is the economic cost relaxation constraint, which needs to be achieved. It can be seen that the optimization problem described by Equations (
33)–(
38) is a feasibility problem since it does not seek to minimize any cost function. The CRSS problem returns the steady-state operating point (
,
) at the relaxed economic cost function value. This is used in the subsequent parts of the zone modification algorithm to obtain the ellipsoidal control invariant set.
To compute the ellipsoidal control invariant set, the nonlinear system is first linearized about the steady-state operating point (
,
) obtained from the optimization problem described by Equations (
33)–(
38) to obtain a linear system of differential equations of the form
where
and
are matrices of appropriate dimensions, and
and
denote the system states and input in deviation form, i.e.,
and
. Following the linearization, a semi-definite program (SDP) is formulated according to the work by Polyak and Shcherbakov [
28]. The SDP to be solved is presented in Optimization problem described by Equations (
40)–(
42).
where
P and
Y are matrices of appropriate dimension and
is the bound on the input, i.e.,
. By maximizing the trace of
P, the maximal ellipsoidal control invariant set under the constrained input can be obtained from the optimal solution of Equations (
40)–(42) as
It is worth mentioning that computing an ellipsoidal control invariant set for the case where System (
39) is stable (i.e., real part of the eigen values of
A are negative) is trivial. This is because the stability region spans the entire state space and the input is not necessary for stabilization. Thus, Optimization problem (
40)–(
42) will not return a solution since the maximal ellipsoidal control invariant set is unbounded. In such a situation, the Lyapunov equation
is solved with
Q being an identity matrix of appropriate dimension. In this case the ellipsoidal control invariant set is obtained as
where
is a scalar parameter which determines the size of the invariant set.
Remark 1. A linear system obtained by linearizing a nonlinear system might only be accurate within a very small region of the linearization point (origin). To avoid obtaining an ellipsoidal control invariant set that spans areas in the state space for which the linear model is inaccurate, the bound on the input should be reduced. The magnitude of the reduction ultimately depends on the properties of the system.
Once
is obtained, it is projected into the output space using the output equation to obtain the modified target zone
such that
Since the output equation in Equation (
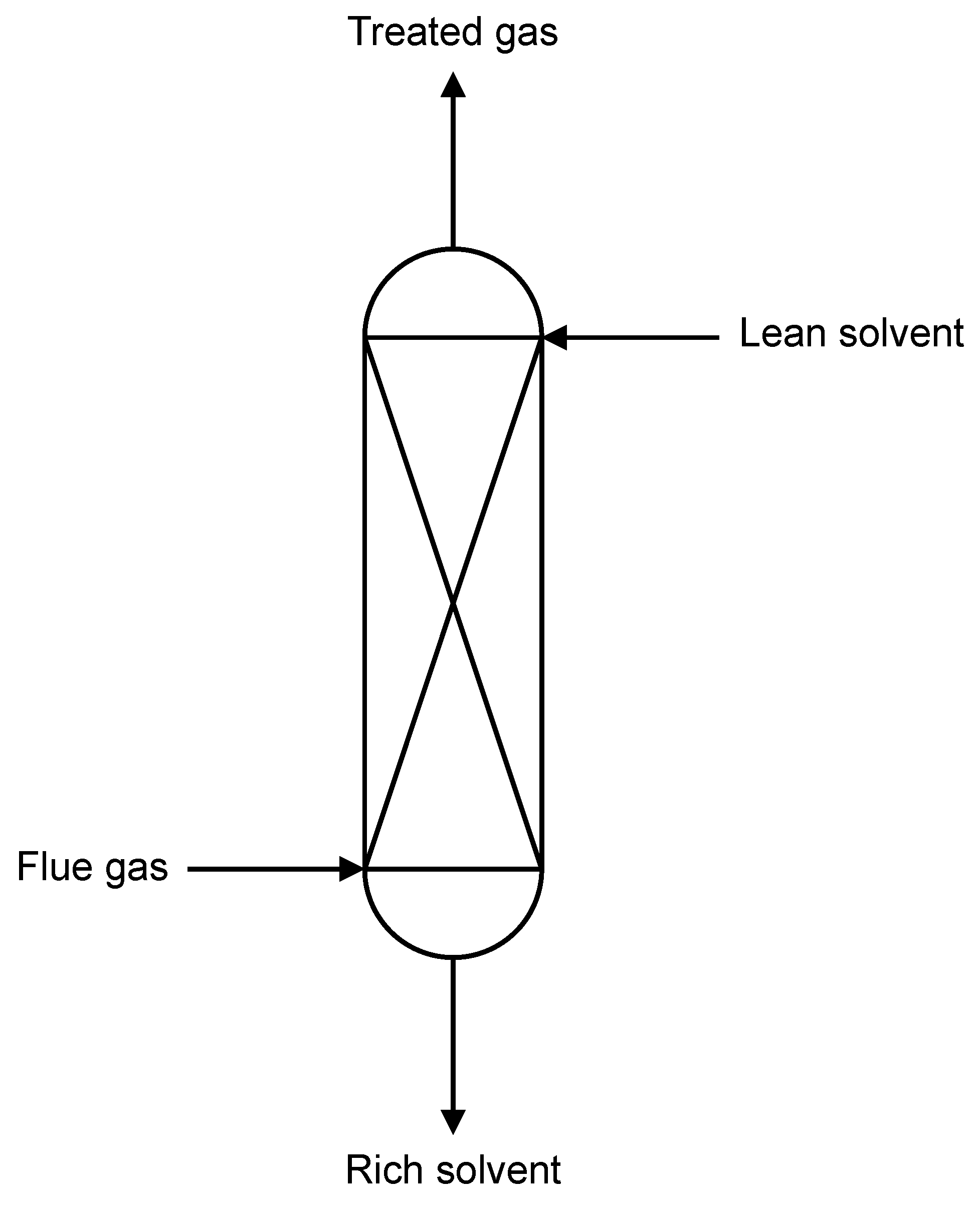
10) depends on only the concentration of CO
in the gas exiting the top of the absorption column (inlet CO
concentration in the gas phase is fixed), the minimum and the maximum state in
can be used to obtain
. For more general cases, a finite sample of states in
may be required. The modified output zone
is then enlarged by an
-ball. This is used as a stopping criterion by checking if the enlarged modified output target zone (
) does not intersect with any part of the output space outside the output target zone, that is
The procedure is run in a while loop until the stopping criterion in Equation (
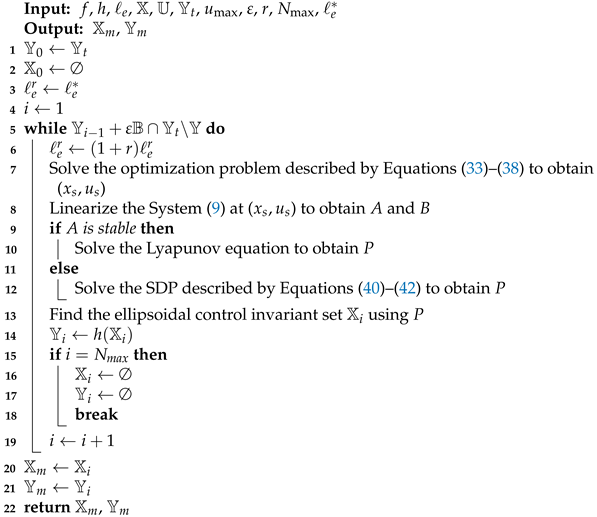
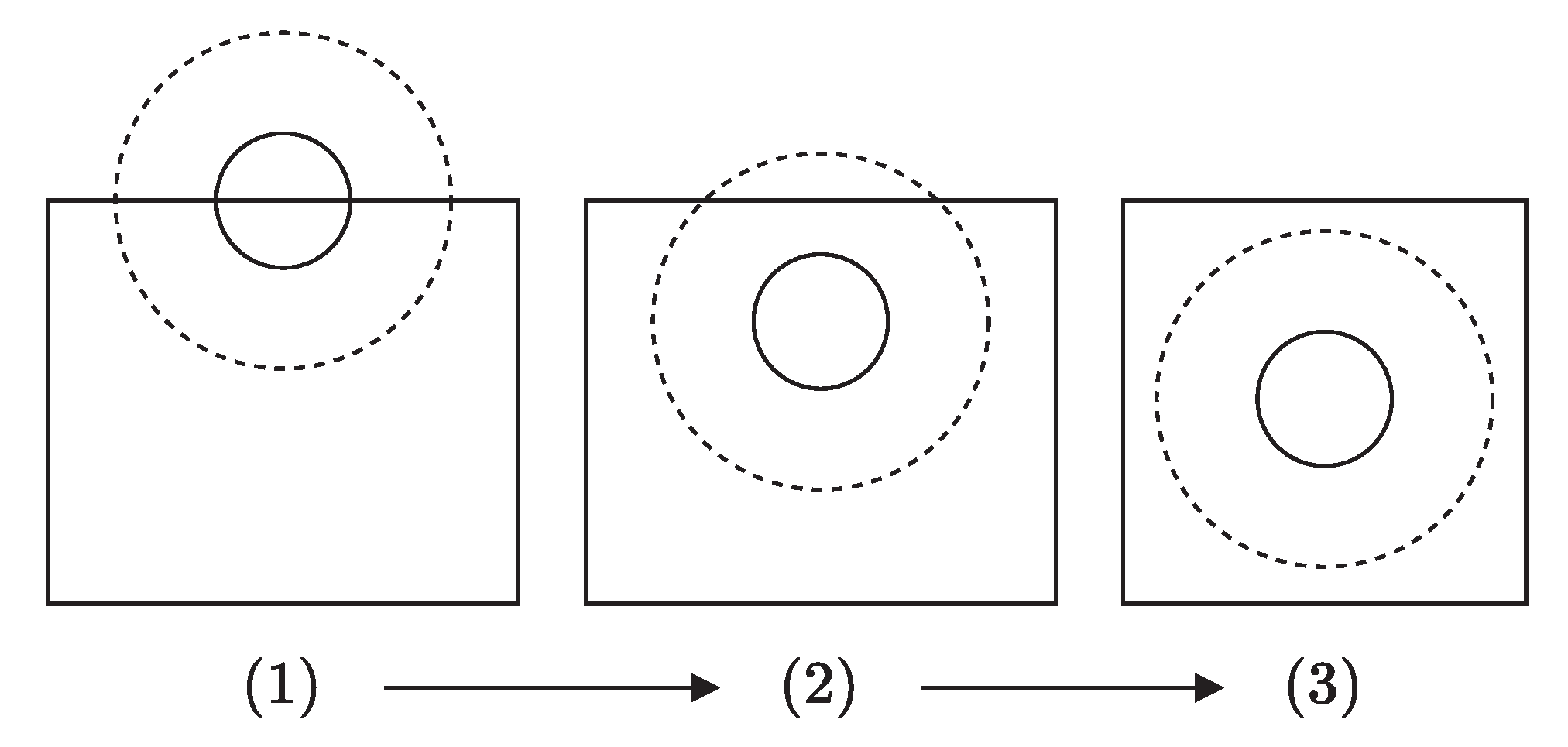
45) is met. The entire zone modification algorithm is summarized in Algorithm 1. A visual depiction of the algorithm is shown in
Figure 2.
| Algorithm 1: Modification of target zone. |
![Energies 15 01140 i001]() |
The algorithm takes as inputs the nominal system model f, the output equation h, the state and input constraints, the optimal economic cost within the target zone as well as the parameters , the cost relaxation rate r and the maximum number of iterations . is introduced in the algorithm to ensure that the while loop does not run indefinitely if a poor choice of the parameters are selected. The algorithm terminates with an empty set if the parameters are poorly chosen.
While the modified output zone
is in a form that can be used in the NZEMPC optimization problem described by Equations (
18)–(
25), this may not the best approach. This is because there is no guarantee that the set
obtained from the projection of the ellipsoidal control invariant set
is also control invariant; therefore, the ellipsoidal control invariant set
needs to be used the MPC algorithm; however, replacing the zone slack constraint (
25) will lead to having the number of slack variables equal to the dimension of the state of the system. Since in most control systems the dimension of the output is smaller than or equal to the dimension of the system states, the increased number of slack variables
will eventually increase the size of the optimization problem to be solved online. Thus to mitigate this problem, the zone constraint is modified to Equation (
53) and an additional positivity constraint (
54) is added. This results in only one slack variable with is independent of the input or the output dimension. Full details of the robust economic model predictive control with zone tracking (RZEMPC) algorithm is presented in the optimization problem described by Equations (
46)–(
54).
The constraints in the optimization problem described by Equations (
46)–(
54) are the same as previously defined.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}