
A Review of Recent Best Practices in the Development of Real-Time Power System Simulators from a Simulator Manufacturer’s Perspective

Abstract
:1. Introduction
- The development of a universal converter model to overcome modeling challenges associated with real-time power electronics simulation and the HIL testing of converter controls;
- the addition of new features related to IEC 61850 Edition 2.0/2.1 and other developments related to the simulation and HIL testing of substation automation systems, and;
- graphical user interface updates that significantly improve the user experience.
2. Advances and Best Practices in Real-Time Simulation
2.1. Power Electronics Modelling and Testing
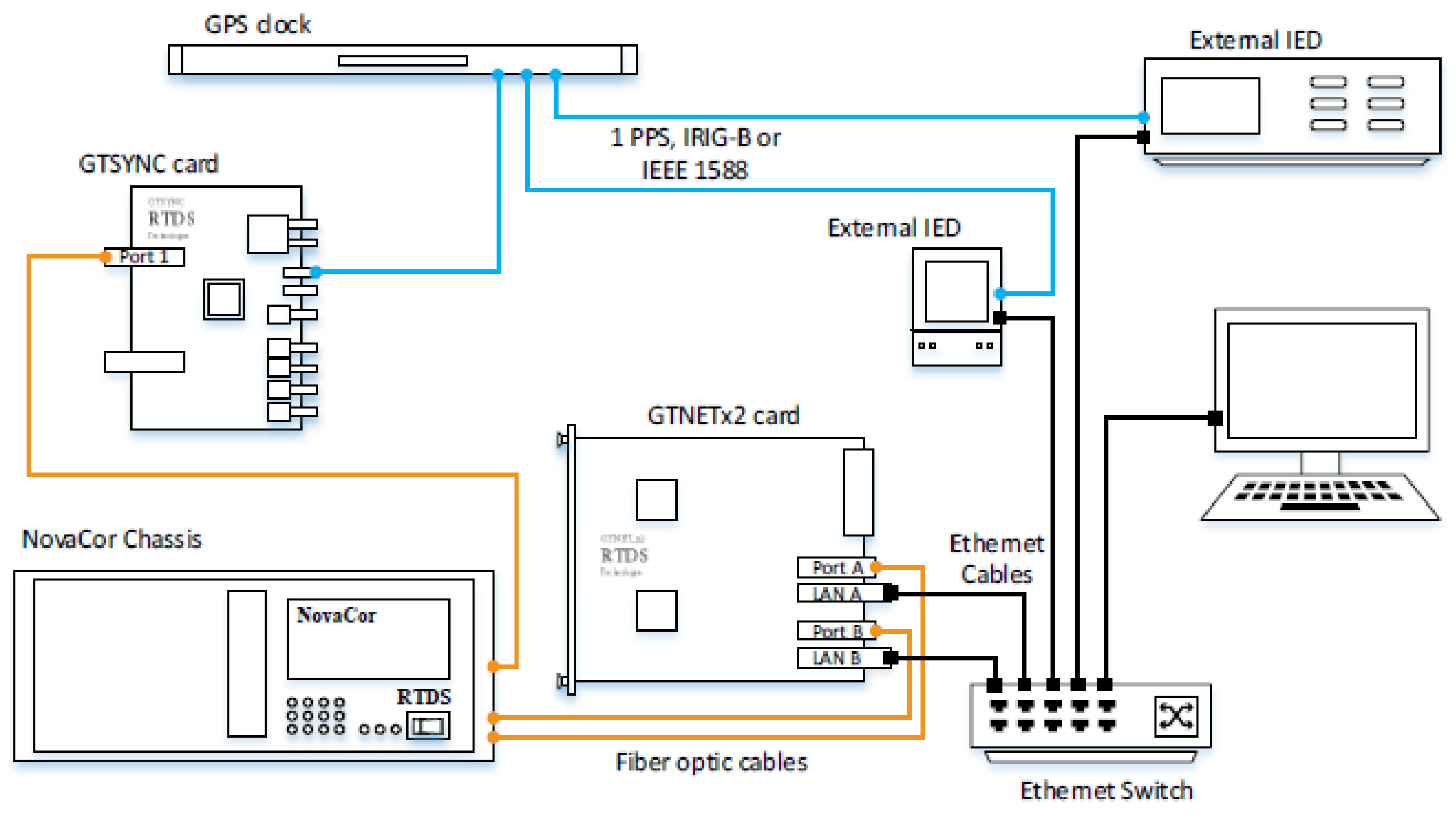
2.1.1. Hardware Integration
2.1.2. Line-Commutated Converter Simulation
2.1.3. Voltage-Source Converter Simulation via L/C Switching Models and Decoupled Resistively-Switched Models
- The L/C switching method causes artificial switching losses associated with abruptly switching from a small inductor (representing the ON state) to a small capacitor (representing the OFF state) model. Losses increase with switching frequency until they are generally deemed excessive in the 3–5 kHz range [12];
- The L/C representation can introduce current and voltage oscillation that appears as noise on the output waveforms;
- The impedance of the switch is frequency-dependent, which limits its operational bandwidth. This places a limitation on the timestep in order to ensure that the ON/OFF impedance ratio is sufficiently large.
- There was potential for the interface transmission line to contribute artificial series inductance and shunt capacitance to the system;
- Due to memory limitations, it was only possible to represent a limited number of switches this way.
2.1.4. Improved Multi-Rate Simulation Environment and Resistively-Switched Models
2.1.5. Average Value Models
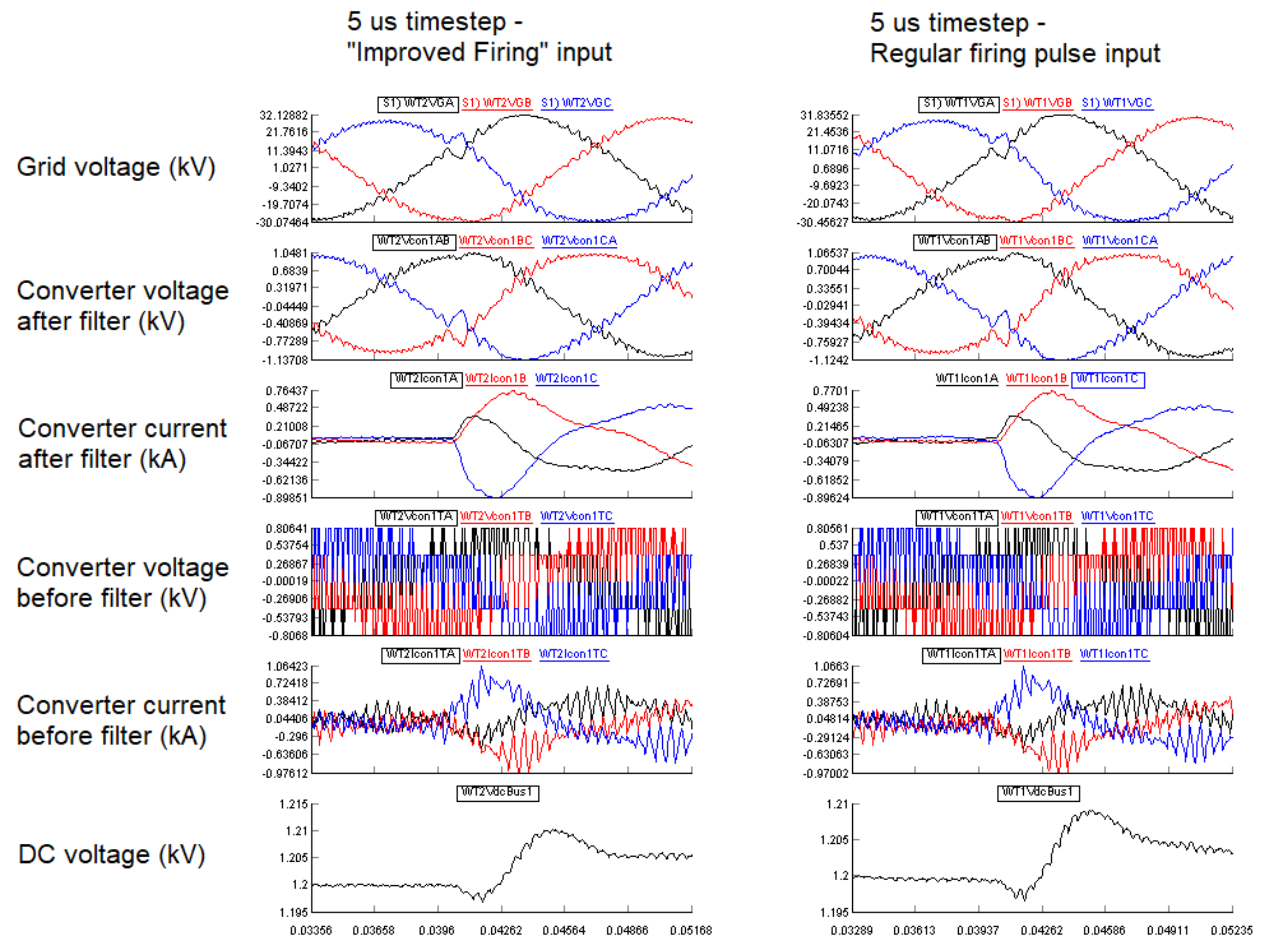
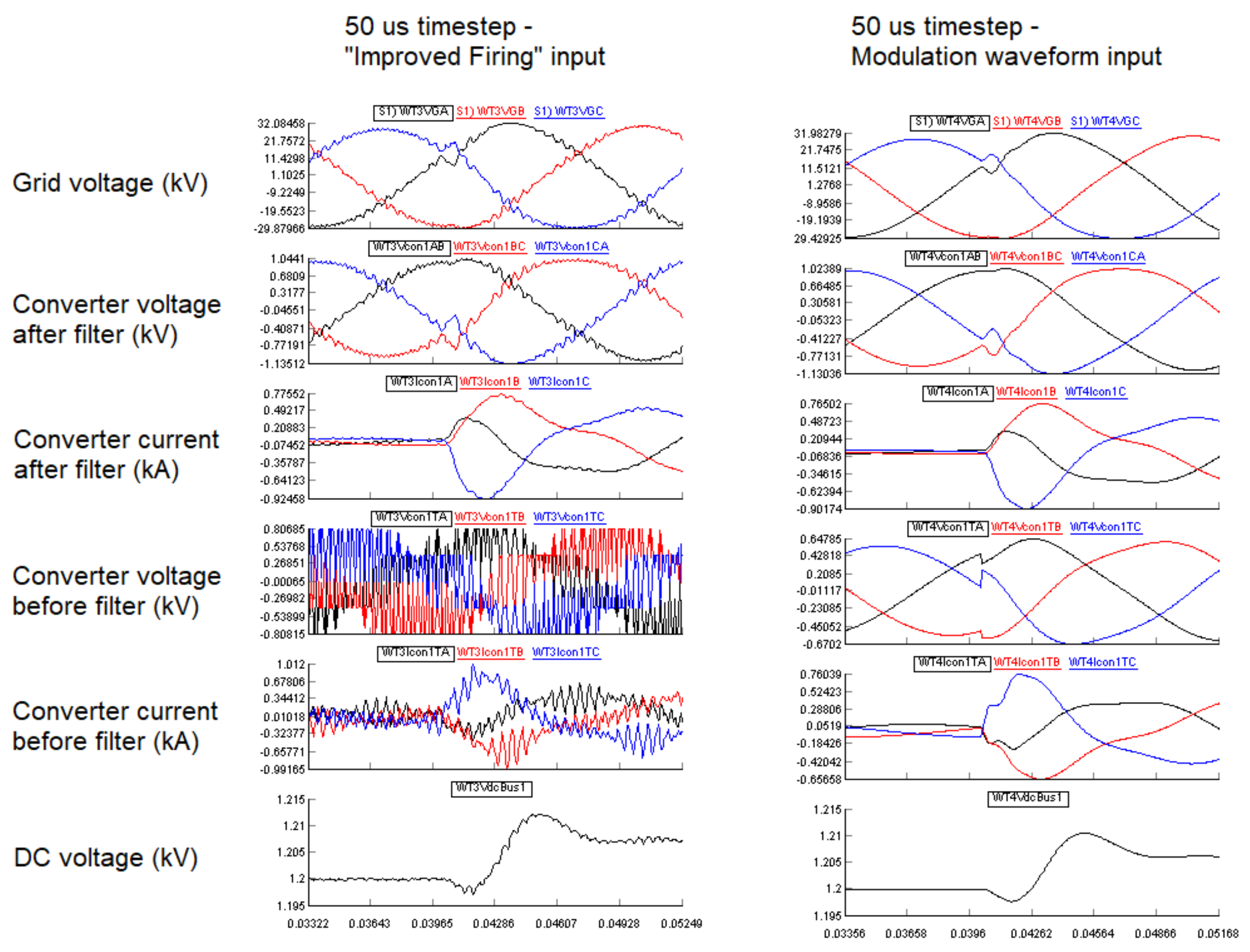
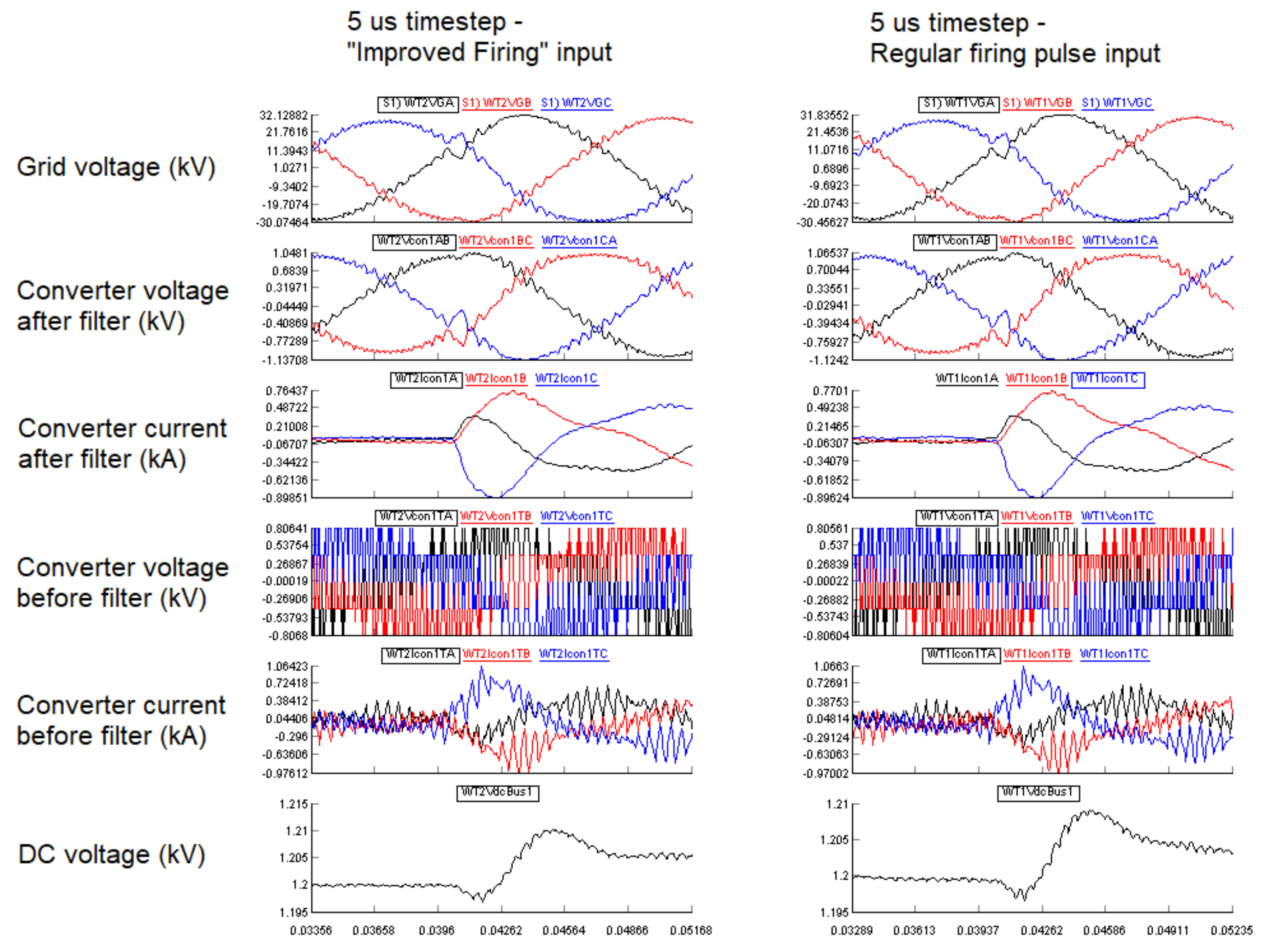
2.1.6. A Novel Universal Converter Model
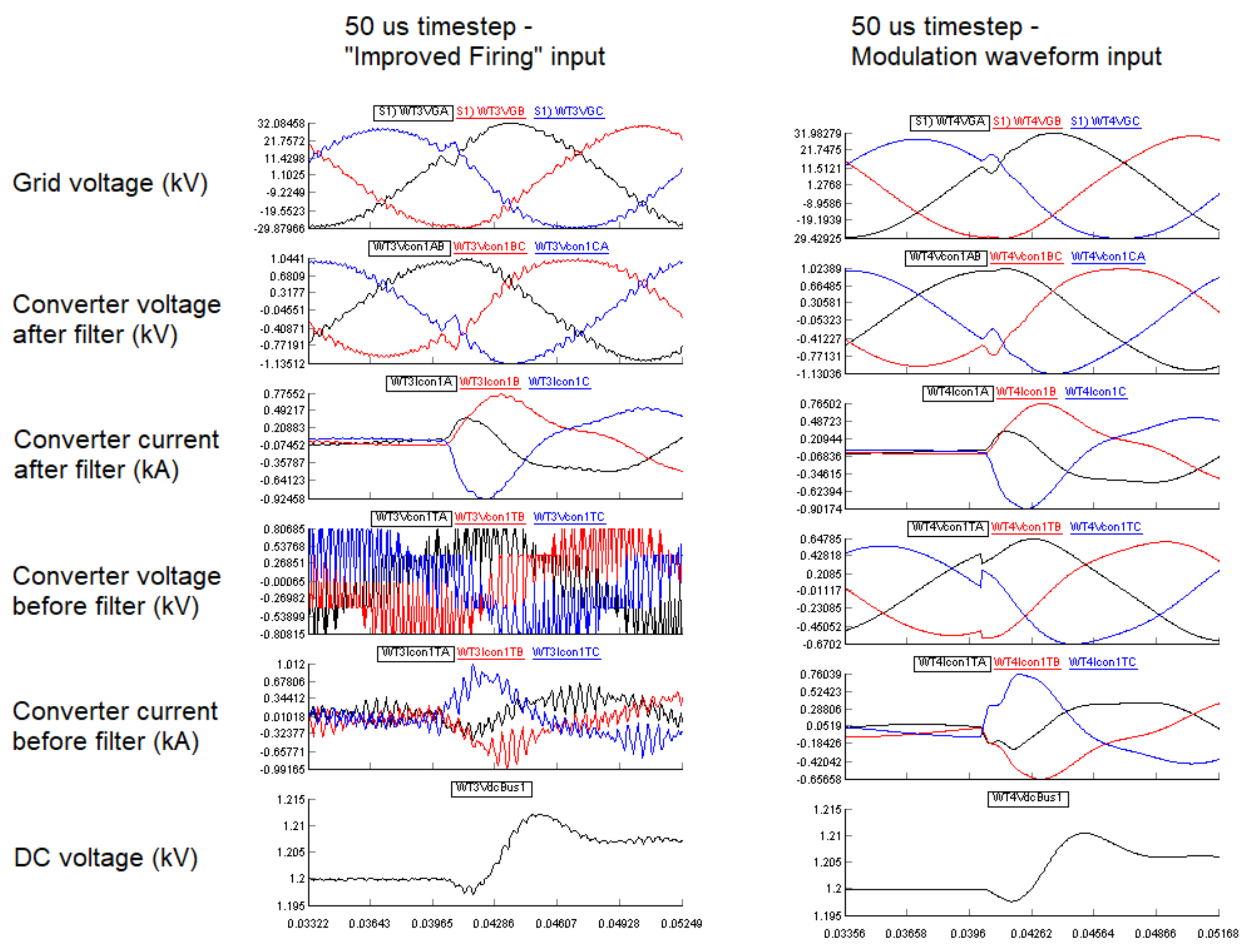
- The converter model receives a sin wave as a modulation waveform, and the result is similar to that of an average value model, with some performance improvements. This option is available for a wide range of timesteps, in the range of 1–50 μs.
- The converter model reads firing pulses (from an external controller or firing pulse generator within the real-time simulation) once per timestep, and the result is similar to the aforementioned resistively-switched converter models, covering switching frequencies in the 30–50 kHz range. This option is only available for subnetworks with a timestep of less than 10 μs.
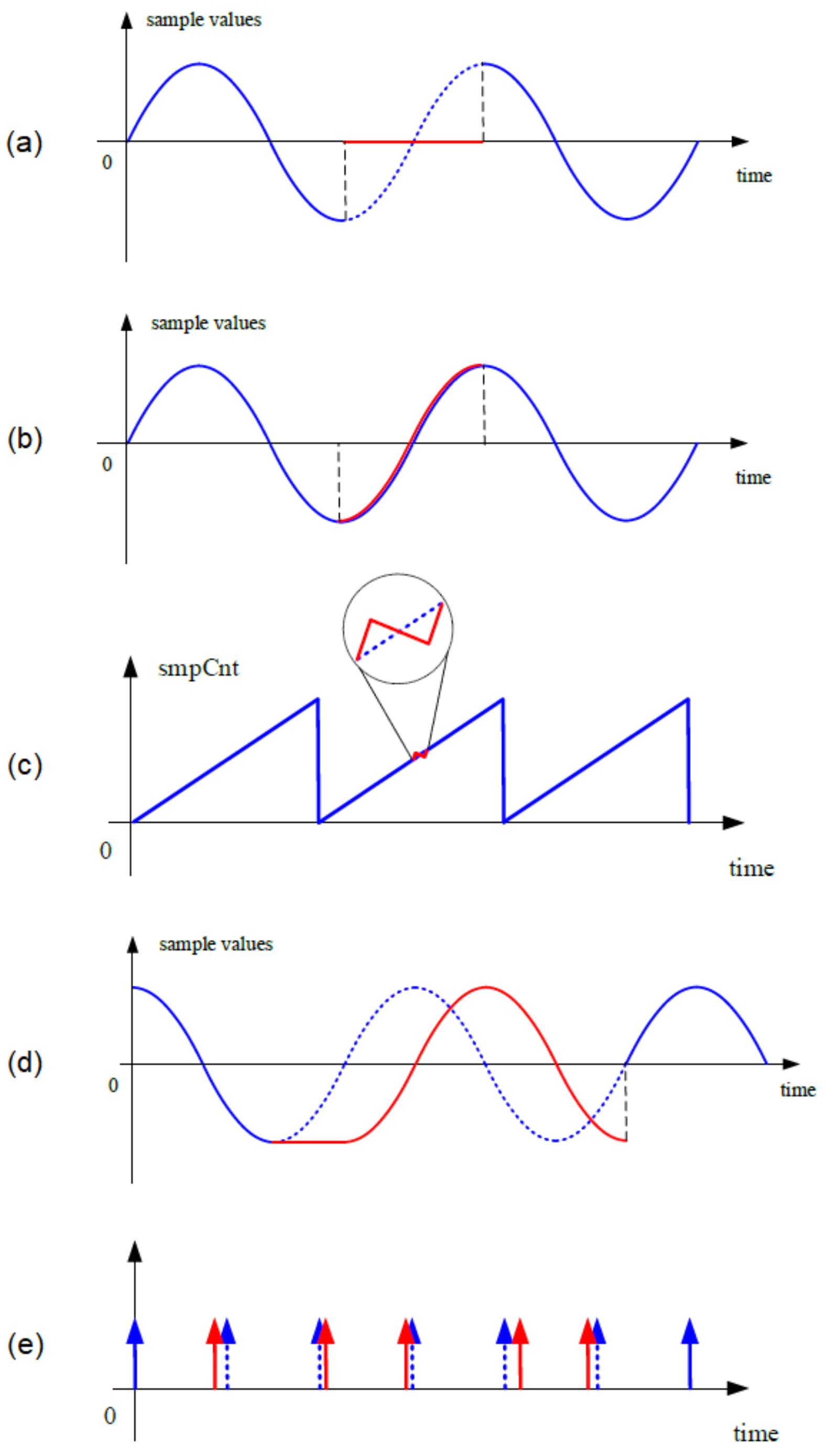
- The “Improved Firing” algorithm has been developed to enhance the performance of the UCM for a wide range of timesteps. In this case, the converter model captures firing pulses at a very high resolution and calculates the portion of each timestep that the valve’s switches should be ON. This effectively allows for multiple ON/OFF transitions within each timestep. This novel option increases the range of switching frequencies that can be covered by the converter model; in subnetworks with a timestep of less than 10 μs, frequencies of up to 150 kHz can be tested. Perhaps more significantly, this feature can also be used in standard simulations with a timestep of 30–50 μs. It allows for frequencies of 2–3 kHz to be represented in detail without requiring a smaller timestep. The computational burden is therefore significantly reduced compared to previous models; several detailed converted models can be placed in simulations running on a single core.
- It offers a non-decoupled, resistively-switched converter modeling option.
- It can be run with the typical EMT simulation timestep of 30–50 μs. This allows for many detailed converter models to be allocated to a smaller simulation hardware configuration than was previously possible (i.e., fewer licensed cores). The UCM, therefore, benefits users not only with its improved numerical stability and accuracy over a greater range of switching frequencies but also with its hardware efficiency [19].
- Switching frequencies of up to 150 kHz can be accurately tested without requiring timesteps in the nanosecond range.
- Switching frequencies of 2–3 kHz can be accurately tested with timesteps in the 30–50 μs range.
2.2. IEC 61850 Modelling, Configuration, and Testing
2.2.1. Sampled Values Manipulation
- Support for a wide range of SV sampling rates, including those defined in IEC 61869-9 and several retained for IEC 61850-9-2-LE backward compatibility [26]. This includes a sampling rate of 96 kHz as per IEC 61869-9, the preferred sampling rate for high-bandwidth DC instrument transformer applications.
- Support for an SV sampling rate of 250 kHz. This capability was developed based on the requirements of RTDS Simulator users with ultra-high-bandwidth applications such as HVDC control and protection testing [27].
- Support for SV stream and data manipulation options, which are summarized below and described in additional detail in [28].
- VLAN Priority;
- VLAN ID;
- Application ID;
- Length of SV packet;
- Reserved 1;
- Reserved 2;
- Number of ASDU;
- Configuration revision;
- Sample count;
- Destination MAC address;
- Source MAC address;
- Stream identification;
- Stop/resume: Simulates the loss of packets on the network by stopping and re-starting SV publishing from the operator’s console.
- Duplicate: Simulates a problematic network topology by duplicating SV packets.
- Swap: Simulates the non-sequential arrival of packets, due to problematic network routing, by swapping the order of two SV packets.
- Delay: Simulate undesirable network latency by delaying SV packets.
- Jitter: Simulate variable latency by adding positive/negative jitter to the stream. Jitter can be controlled with a resolution of 10 ns.
2.2.2. Support for PTP Synchronization Profiles
2.2.3. Capability Advancements and Support for IEC 61850-8-1 Edition 2.0/2.1
2.2.4. An Improved IED Configuration Tool
- Configure IEDs simulated by GSEv7 components.
- Carry out data binding (mapping input and output data to signals in the simulation).
- Generate a Configured IED Description (CID) files for every GSEv7 component, which contains Substation Configuration Language (SCL) files for each simulated IED within it.
- Import SCL files from external devices connected to the real-time simulator.
2.3. Graphical User Interface Improvements
2.3.1. Speed
2.3.2. Look and Feel
2.3.3. Automated Component Naming
2.3.4. Buswork Tool
3. Discussion
4. Conclusions
- A novel universal converter model for power electronics modeling that uses a proprietary algorithm to achieve high-resolution firing without requiring a reduced simulation timestep. The model overcomes several challenges associated with real-time power electronics modeling, including fictitious power losses, numerical stability issues due to decoupling/delay, and the typically high computational burden of detailed switching models.
- Enhancements to substation automation simulation facilities which reflect new features/requirements of IEC 61850 Edition 2.0/2.1 and other industry developments. This includes improved GOOSE Messaging capabilities, an IED Configuration Tool for enhanced configuration of GOOSE Messaging streams, Sampled Values manipulation options, and support for PTP synchronization profiles.
- An updated graphical user interface (GUI) with improved speed, look, and feel. The GUI includes new features such as automated component naming and an efficient buswork drawing tool.
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Duchen, H.; Lagerkvist, M.; Lovgren, N.; Kuffel, R. Validating the Real Time Digital Simulator for HVDC Dynamic Performance Studies. In Proceedings of the ICDS, Montreal, QC, Canada, 28–30 May 1997; pp. 245–250. [Google Scholar]
- Arendt, L.; Giesbrecht, J.; Kuffel, R.; Wang, X.; Wierckx, R.; Woodford, D. Enhanced performance of a conventional HVDC analogue simulator with a real-time digital simulator. In Proceedings of the Eleventh Power Systems Computation Conference, Avignon, France, 30 August–3 September 1993; Volume 1, pp. 663–669. [Google Scholar]
- Sidwall, K.; Zakonsjek, J. Experiences and future potential: Real-time simulation for de-risking converter-connected generation, HVDC interconnections, and modern protection. In Proceedings of the CIGRE SEERC Conference, Vienna, Austria, 30 November 2021. [Google Scholar]
- Badrzadeh, B.; Emin, Z. The Need for Enhanced Power System Modelling Techniques and Simulation Tools; Reference Papers; CIGRE Electra: Brisbane, Australia, 2020; No. 308; pp. 54–55. [Google Scholar]
- Dommel, H.W. Digital Computer Solution of Electromagnetic Transients in Single- and Multiphase Networks. IEEE Trans. Power Appar. Syst. 1969, 88, 388–399. [Google Scholar] [CrossRef]
- Kuffel, R.; Maguire, T.; Wierckx, R.; Yoon, Y.; Kim, T.; Cha, S. Overview & Comparison of Power System Analysis and Study Tools. In Proceedings of the IERE Workshop, Taejon, Korea, September 1999; pp. 63–69. [Google Scholar]
- Kuffel, R.; Giesbrecht, J.; Maguire, T.; Wierckx, R.P.; McLaren, P. RTDS—A Fully Digital Power System Simulator Operating in Real Time. In Proceedings of the International Conference on Energy Management and Power Delivery, Singapore, 21–23 November 1995. [Google Scholar]
- Friedrich, J.; Le, H.; Starke, W.; Stuechli, J.; Sinharoy, B.; Flurh, E.; Dreps, D.; Zyuban, V.; Still, G.; Gonzalez, C.; et al. The Power8TM Processor: Designed for Big Data, Analytics, and Cloud Environments. In Proceedings of the IEEE International Conference on IC Design & Technology, Austin, TX, USA, 28–30 May 2014. [Google Scholar]
- Maguire, T.; Giesbrecht, J. Small Time-Step (≤2 μs) VSC Model for the Real Time Digital Simulator. In Proceedings of the ICPST, Montreal, QC, Canada, 19–23 June 2005; pp. 1–6. [Google Scholar]
- RTDS Technologies Inc. RSCAD® Power System Components Manual; RTDS Technologies Inc.: Winnipeg, MB, Canada, September 2018; pp. 744–768. [Google Scholar]
- Wang, K.; Xu, J.; Tai, N.; Tong, A.; Hou, J. A Generalized Associated Discrete Circuit Model of Power Converters in Real-Time Simulation. IEEE Trans. Power Electron. 2019, 34, 2220–2233. [Google Scholar] [CrossRef]
- Qi, L.; Steurer, M.; Woodruff, S. Study of power loss of small time-step VSC model in RTDS. In Proceedings of the 2007 IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2007; pp. 1–7. [Google Scholar] [CrossRef]
- Forsyth, P.; Hasler, J.; Larsson, T.; Maguire, T. Voltage Source Converter modeled in RTDS—Experiences and comparison with field results. In Proceedings of the International Conference on Power Systems Transients, Lyon, France, 4–7 June 2007. [Google Scholar]
- Maguire, T.; Elimban, S.; Tara, E.; Zhang, Y. Predicting Switch ON/OFF Statuses in Real Time Electromagnetic Transients Simulations with Voltage Source Converters. In Proceedings of the IEEE Conference on Energy Internet and Energy System Integration, Beijing, China, 20–22 October 2018. [Google Scholar]
- RTDS Technologies Inc. Webinar and Demo: The New Universal Converter Model—A Revolution in Real-Time Power Electronics Simulation. June 2021. Available online: https://www.rtds.com/events/webinar-and-demo-ucm/ (accessed on 20 December 2021).
- RTDS Technologies Inc. RSCAD® Universal Converter Models Manual; RTDS Technologies Inc.: Winnipeg, MB, Canada, 4 March 2021. [Google Scholar]
- Dufour, C. Method and System for Reducing Power Losses and State-Overshoots in Simulators for Switched Power Electronic Circuit. U.S. Patent 9,665,672, 30 May 2017. [Google Scholar]
- Lian, K.L.; Lehn, P.W. Real-time simulation of voltage source converters based on time average method. IEEE Trans. Power Syst. 2005, 20, 110–118. [Google Scholar] [CrossRef]
- Cheng, Z.; Narayanan, S.; Holbach, J.; Stevens, J.; Cummings, M.; Rohde, R.; Guo, C.; Encarnacion, N. Investigating Inverter-Based Resources Impacts on the Transmission Line Protection via Hardware-in-the-loop Simulation. In Proceedings of the RTDS Technologies’ User Spotlight Series 2.0, Winnipeg, MB, Canada, 24 November 2021; Available online: https://onlinexperiences.com/scripts/Server.nxp?LASCmd=AI:4;F:QS!10100&ShowUUID=B4241EF5-805B-403B-B4C5-81DF97DB6AD6&AffiliateData=rtds&Referrer=https%3A%2F%2Fwww.rtds.com%2Fevents%2Fuss2%2F (accessed on 20 January 2021).
- Desjardine, M.; Forsyth, P.; Mackiewicz, R. Real Time Simulation Testing Using IEC61850. In Proceedings of the IPST 2007, Lyon, France, 4–7 June 2007. [Google Scholar]
- International Electrotechnical Commission. Communication Networks and Systems for Power Utility Automation—ALL PARTS. Available online: https://webstore.iec.ch/publication/602 (accessed on 23 November 2021).
- Sidwall, K.; Forsyth, P. Advancements in Real-Time Simulation for the Validation of Grid Modernization Technologies. Energies 2020, 13, 4036. [Google Scholar] [CrossRef]
- Rajkumar, V.S.; Tealane, M.; Ştefanov, A.; Palensky, P. Cyber Attacks on Protective Relays in Digital Substations and Impact Analysis. In Proceedings of the 2020 8th Workshop on Modeling and Simulation of Cyber-Physical Energy Systems, Sydney, Australia, 21 April 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Udren, E.A.; Vandiver, B.; Anderson, J.; Antonova, G.; Apostolov, A.; Beaumont, P.; Beresh, R.; Brunner, C.; Calero, F.; Chelmecki, C.; et al. Application of Ethernet Networking Devices Used for Protection and Control Applications in Electric Power Substations: Report of Working Group P6 of the Power System Communications and Cybersecurity Committee of the Power and Energy Society of IEEE. In Proceedings of the 2021 74th Conference for Protective Relay Engineers (CPRE), College Station, TX, USA, 22–25 March 2021; pp. 1–88. [Google Scholar] [CrossRef]
- RTDS Technologies Inc. Webinar and Demo: Enhanced IEC 61850 Sampled Values Streaming with the RTDS Simulator’s GTFPGA Unit. 29 September 2021. Available online: https://www.rtds.com/events/iec-61850-gtfpga/ (accessed on 20 December 2021).
- RTDS Technologies Inc. RSCAD® Control Library Manual: GTFPGA-SV-V3; RTDS Technologies Inc.: Winnipeg, MB, Canada, 2021; p. 1394. [Google Scholar]
- Jin, S.; Stott, T. Evaluate HVDC Protection and Control Schemes using High Speed Process Bus Technology. In Proceedings of the 17th International Conference on AC and DC Power Transmission, Online, 8 July–8 December 2021. [Google Scholar]
- Jin, S.; Gurusinghe, D.R.; Ouellette, D.S. Evaluating Ethernet based Protection with IEC 61850 SV Data and Stream Manipulation. In Proceedings of the Advanced Power System Automation and Protection (APAP), Jeju, Korea, 11–14 October 2021. [Google Scholar]
- IEC/IEEE 61850-9-3 Edition 1.0 2016-05Communication Networks and Systems for Power Utility Automation—Part 9-3: Precision Time Protocol Profile for Power Utility Automation, IEC/IEEE International Standard: Piscataway, NJ, USA, 31 May 2016; pp. 1–18.
- Junior, P.; Martins, C.M.; Bernardino, R.C.; Pereira, P.S. Analysis of PTP Synchronization Behavior with IEC 61850 Process Bus. In Proceedings of the 2019 IEEE PES Innovative Smart Grid Technologies Conference—Latin America (ISGT Latin America), Gramado, Brazil, 15–18 September 2019; pp. 1–6. [Google Scholar]
- Mackiewicz, R. Overview of IEC 61850 and Benefits. In Proceedings of the 2006 IEEE PES Power Systems Conference and Exposition, Atlanta, GA, USA, 29 October–1 November 2006; pp. 623–630. [Google Scholar]
- RTDS Technologies Inc. Webinar and Demo: Meet RSCAD FX! April 2021. Available online: https://www.rtds.com/events/meet-rscad-fx/ (accessed on 20 January 2022).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PWM Switching Frequency (Hz) | Power Losses for Resistively-Switched Model (via Predictive Switching) | Power Losses for L/C ADC Model 1 |
|---|---|---|
| 1260 | 0.18% | 3.0% |
| 3060 | 0.22% | 6.5% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sidwall, K.; Forsyth, P. A Review of Recent Best Practices in the Development of Real-Time Power System Simulators from a Simulator Manufacturer’s Perspective. Energies 2022, 15, 1111. https://doi.org/10.3390/en15031111
Sidwall K, Forsyth P. A Review of Recent Best Practices in the Development of Real-Time Power System Simulators from a Simulator Manufacturer’s Perspective. Energies. 2022; 15(3):1111. https://doi.org/10.3390/en15031111
Chicago/Turabian StyleSidwall, Kati, and Paul Forsyth. 2022. "A Review of Recent Best Practices in the Development of Real-Time Power System Simulators from a Simulator Manufacturer’s Perspective" Energies 15, no. 3: 1111. https://doi.org/10.3390/en15031111
APA StyleSidwall, K., & Forsyth, P. (2022). A Review of Recent Best Practices in the Development of Real-Time Power System Simulators from a Simulator Manufacturer’s Perspective. Energies, 15(3), 1111. https://doi.org/10.3390/en15031111