
Flywheel Energy Storage System in Italian Regional Transport Railways: A Case Study



Abstract
1. Introduction
2. Mathematical Model
2.1. Train and Railway Parameters
2.2. Drive Cycle
2.3. Acceleration and Speed Plot
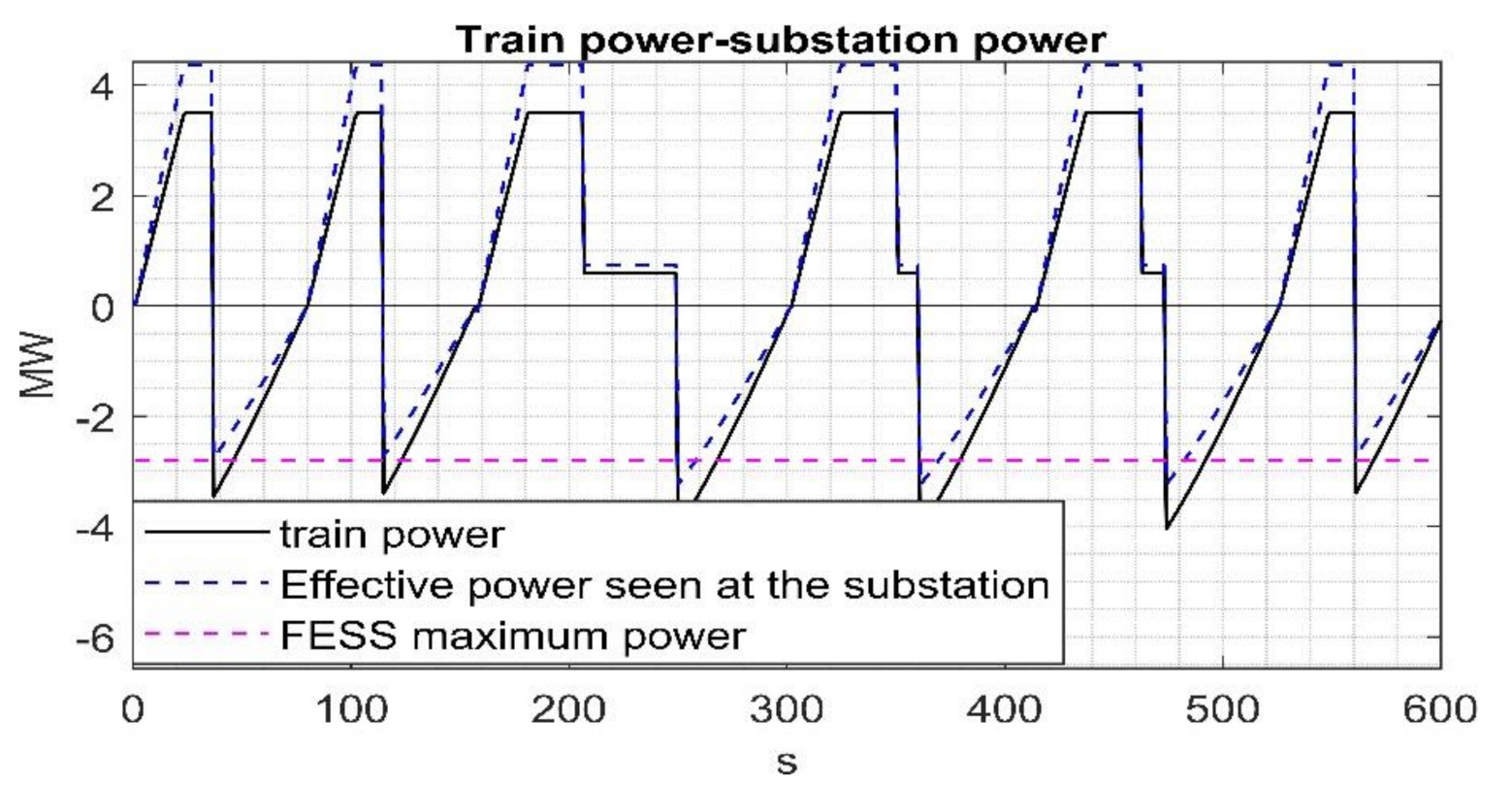
2.4. Energy Management
3. Energy Estimation and Results
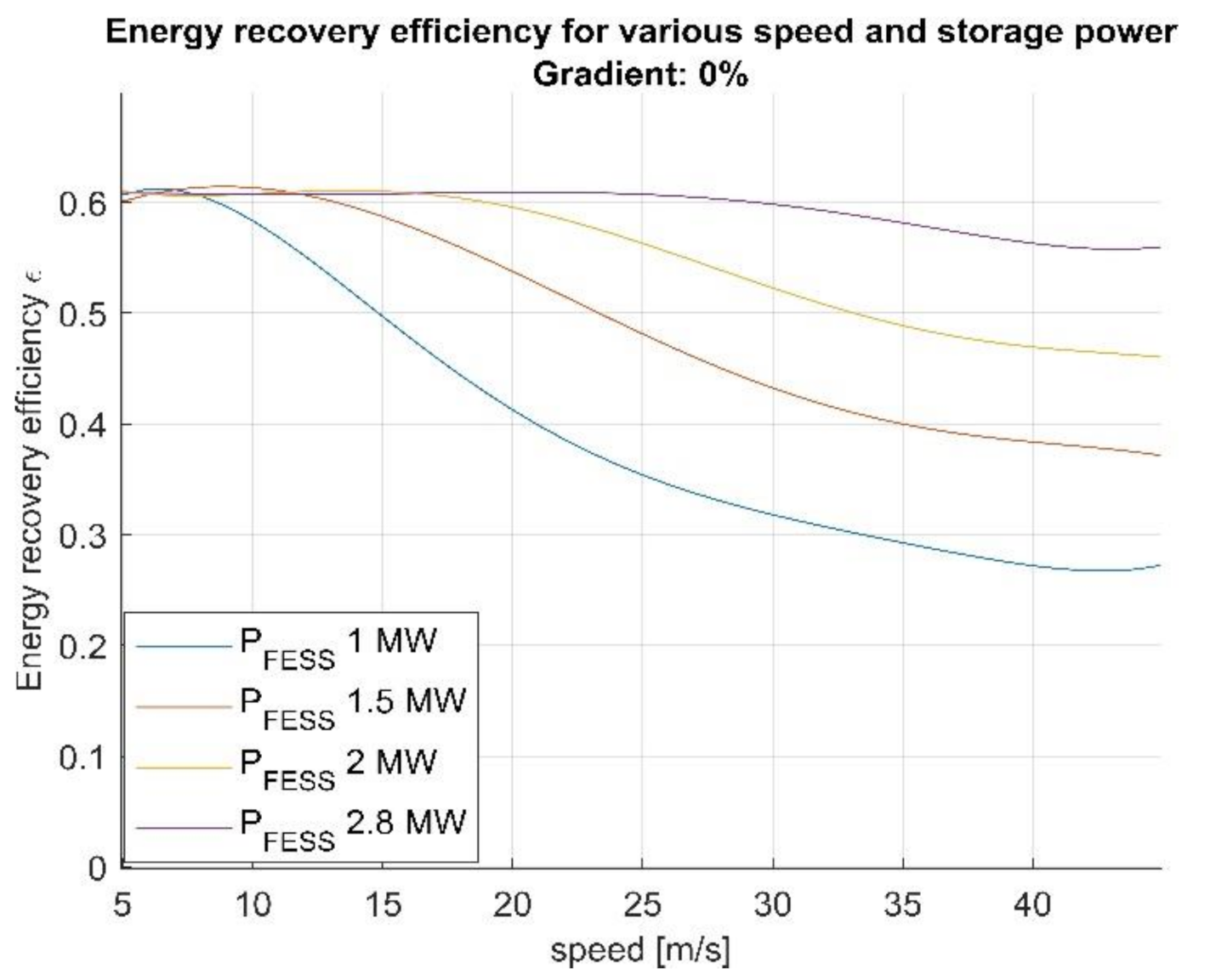
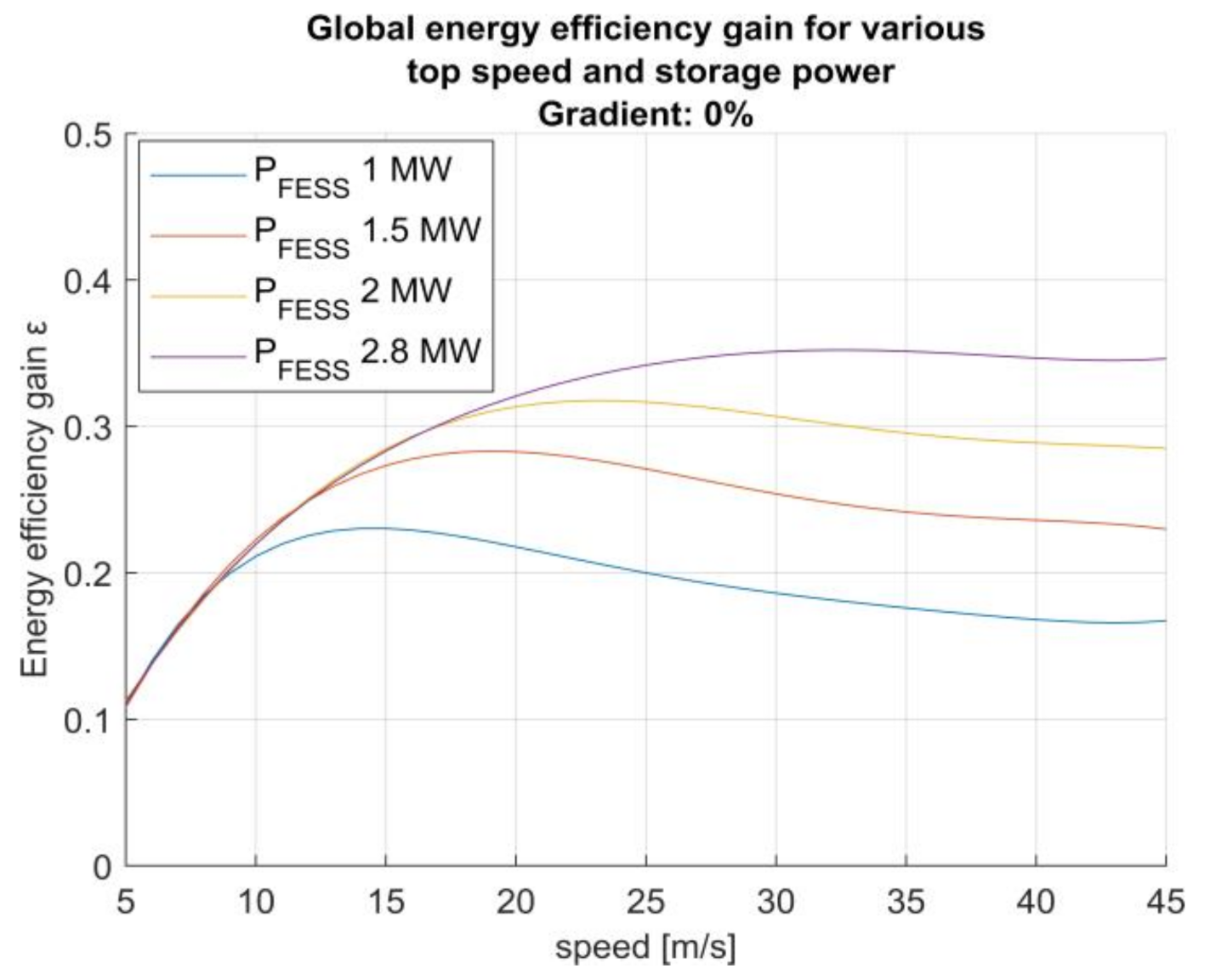
3.1. No Gradient Results
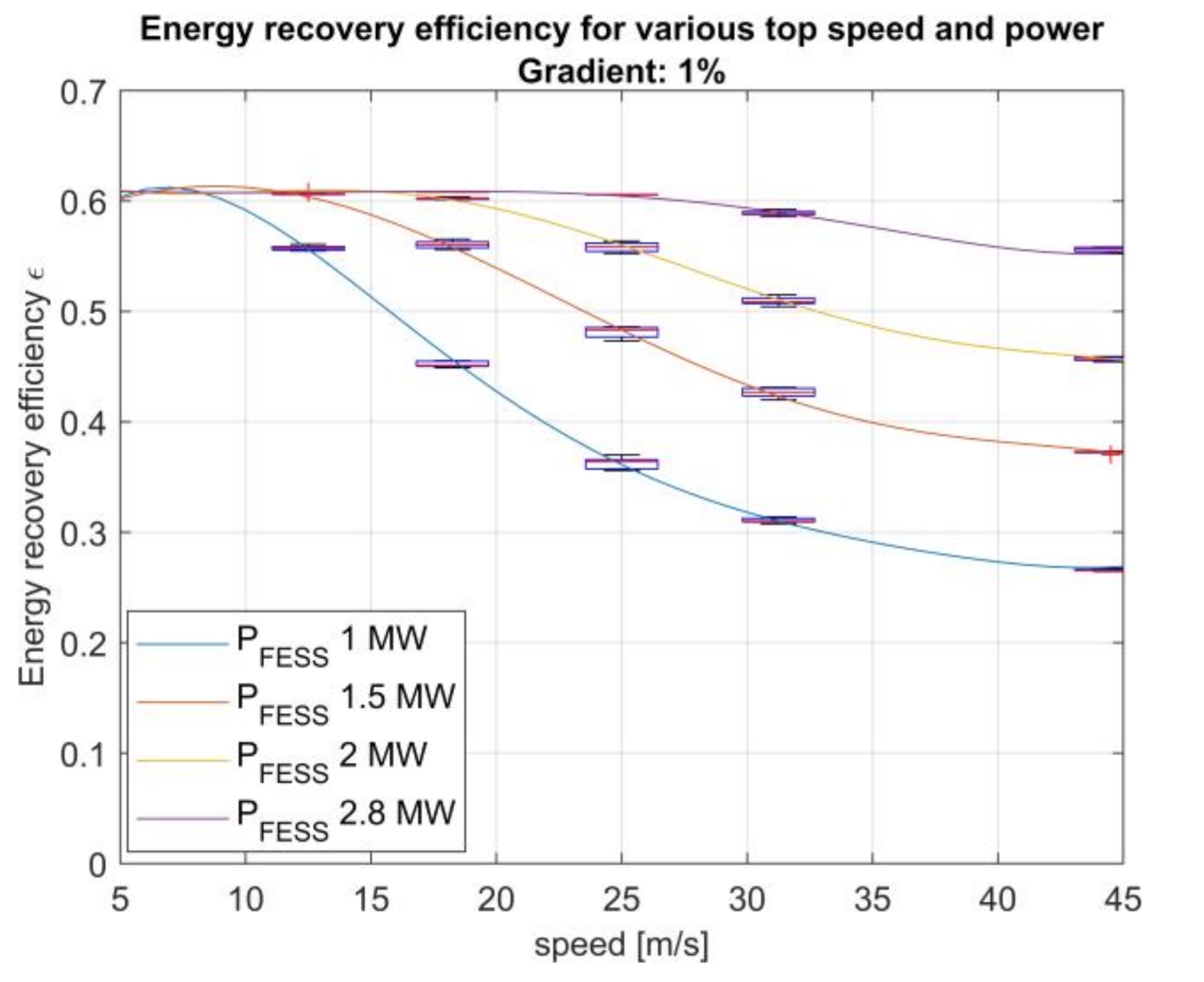
3.2. Gradient Results
3.3. Energy Savings
4. Discussion
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
References
- Khare, V.; Nema, S.; Baredar, P. Solar-wind Hybrid Renewable Energy System: A Review. Renew. Sustain. Energy Rev. 2016, 58, 23–33. [Google Scholar] [CrossRef]
- Elhadidy, M.A.; Shaahid, S.M. Parametric Study of Hybrid (Wind Solar Diesel) Power Generating Systems. Renew. Energy 2000, 21, 129–139. [Google Scholar] [CrossRef]
- Lior, N. Sustainable Energy Development: The Present (2009) Situation and Possible Paths to the Future. Energy 2010, 35, 3976–3994. [Google Scholar] [CrossRef]
- Ibrahim, H.; Ilinca, A.; Perron, J. Energy Storage Systems—Characteristics and Comparisons. Renew. Sustain. Energy Rev. 2008, 12, 1221–1250. [Google Scholar] [CrossRef]
- Ebrahim, T.; Zhang, B. CleanTX Analysis on Energy Storage; Cleanenergy Incubator, University of Texas at Austin: Austin, TX, USA, 2008. [Google Scholar]
- Palizban, O.; Kauhaniemi, K. Energy Storage Systems in Modern Grids—Matrix of Technologies and Applications. J. Energy Storage 2016, 6, 248–259. [Google Scholar] [CrossRef]
- U.S. Department of Energy. Grid Energy Storage; U.S. Department of Energy: Washington, DC, USA, 2013.
- Strzelecki, R.M.; Benysek, G. (Eds.) Power Electronics in Smart Electrical Energy Networks; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Zhao, H.; Wu, Q.; Hu, S.; Xu, H.; Rasmussen, C.N. Review of Energy Storage System for Wind Power Integration Support. Appl. Energy 2015, 137, 545–553. [Google Scholar] [CrossRef]
- Reihani, E.; Sepasi, S.; Roose, L.R.; Matsuura, M. Energy Management at the Distribution Grid Using a Battery Energy Storage System (BESS). Int. J. Electr. Power Energy Syst. 2016, 77, 337–344. [Google Scholar] [CrossRef]
- Oudalov, A.; Cherkaoui, R.; Beguin, A. Sizing and optimal operation of battery energy storage system for peak shaving application. In Proceedings of the 2007 IEEE Lausanne Power Tech, Lausanne, Switzerland, 1–5 July 2007. [Google Scholar]
- Riffonneau, Y.; Bacha, S.; Barruel, F.; Ploix, S. Optimal power flow management for grid connected PV systems with batteries. IEEE Trans. Sustain. Energy 2011, 2, 309–320. [Google Scholar] [CrossRef]
- Mehr, T.H.; Masoum, M.A.; Jabalameli, N. Grid-connected lithium-ion battery energy storage system for load leveling and peak shaving. In Proceedings of the 2013 Australasian Universities Power Engineering Conference (AUPEC), Hobart, Australia, 29 September–3 October 2013. [Google Scholar]
- Lee, H.; Shin, B.Y.; Han, S.; Jung, S.; Park, B.; Jang, G. Compensation for the power fluctuation of the large scale wind farm using hybrid energy storage applications. IEEE Trans. Appl. Supercond. 2011, 22, 5701904. [Google Scholar]
- Kailasan, A.; Dimond, T.; Allaire, P.; Sheffler, D. Design and Analysis of a Unique Energy Storage Flywheel System—An Integrated Flywheel, Motor/Generator, and Magnetic Bearing Configuration. ASME J. Eng. Gas Turbines Power 2015, 137, 042505. [Google Scholar] [CrossRef]
- Liu, H.; Jiang, J. Flywheel Energy Storage—An Upswing Technology for Energy Sustainability. Energy Build. 2007, 39, 599–604. [Google Scholar] [CrossRef]
- Genta, G. Kinetic Energy Storage Theory and Practice of Advanced Flywheel Systems; Butterworths: London, UK, 1985. [Google Scholar]
- Ahrens, M.; Kucera, L.; Larsonneur, R. Performance of a Magnetically Suspended Flywheel Energy Storage Device. IEEE Trans. Control Syst. Technol. 1996, 4, 494–502. [Google Scholar] [CrossRef]
- Bartłomiejczyk, M.; Połom, M. Multiaspect Measurement Analysis of Breaking Energy Recovery. Energy Convers. Manag. 2016, 127, 35–42. [Google Scholar] [CrossRef]
- Ferrovie Emilia Romagna, Immatricolazione E.464. 2009. Available online: https://www.fer.it/wp-content/uploads/2015/04/CIG-5004756C58-Allegato-1-al-Capitolato_documentazione-tecnica.pdf (accessed on 10 October 2021). (In Italian).
- Hillmansen, S. Sustainable Traction Drives. In Proceedings of the 7th IET Professional Development Course on Railway Electrification Infrastructure and Systems (REIS 2015), London, UK, 8–11 June 2015; p. 15. [Google Scholar] [CrossRef]
- Richardson, M.B. Flywheel Energy Storage System for Traction Applications. In Proceedings of the International Conference on Power Electronics Machines and Drives, Sante Fe, NM, USA, 4–7 June 2002; pp. 275–279. [Google Scholar] [CrossRef]
- Rupp, A.; Baier, H.; Mertiny, P.; Secanell, M. Analysis of a Flywheel Energy Storage System for Light Rail Transit. Energy 2016, 107, 625–638. [Google Scholar] [CrossRef]
- Barrero, R.; Tackoen, X.; Van Mierlo, J. Stationary or Onboard Energy Storage Systems for Energy Consumption Reduction in a Metro Network. Proc. Inst. Mech. Eng. F J. Rail Rapid Transit 2010, 224, 207–225. [Google Scholar] [CrossRef]
- Li, Y.L.; Zhang, X.Z.; Dai, X.J. Flywheel Energy Storage System for City Trains to Save Energy. Adv. Mater. Res. 2012, 512–515, 1045–1048. [Google Scholar] [CrossRef]
- Hillmansen, S.; Roberts, C. Energy Storage Devices in Hybrid Railway Vehicles: A Kinematic Analysis. Proc. Inst. Mech. Eng. F J. Rail Rapid Transit 2007, 221, 135–143. [Google Scholar] [CrossRef]
- Renfrew, A.C.; Chymera, M.; Barnes, M. Analysis of Energy Dissipation in an Electric Transit System. In Proceedings of the IEEE/ASME/ASCE 2008 Joint Rail Conference, Wilmington, DE, USA, 22–24 April 2008; pp. 321–326. [Google Scholar] [CrossRef]
- Wang, Z.; Palazzolo, A.; Park, J. Hybrid Train Power with Diesel Locomotive and Slug Car–Based Flywheels for NOx and Fuel Reduction. J. Energy Eng. 2012, 138, 215–236. [Google Scholar] [CrossRef]
- Frilli, A.; Meli, E.; Nocciolini, D.; Pugi, L.; Rindi, A. Energetic Optimization of Regenerative Braking for High Speed Railway Systems. Energy Convers. Manag. 2016, 129, 200–215. [Google Scholar] [CrossRef]
- Rochard, B.P.; Schmid, F. A Review of Methods to Measure and Calculate Train Resistances. Proc. Inst. Mech. Eng. F J. Rail Rapid Transit 2000, 214, 185–199. [Google Scholar] [CrossRef]
- Piller Power Systems. Piller UB-V Series. 2021. Online Datasheet. Available online: https://www.piller.com/en-GB/2777/critical-power-modules-cpm-with-flywheel (accessed on 10 September 2021).
- Sabihuddin, S.; Kiprakis, A.E.; Mueller, M. A Numerical and Graphical Review of Energy Storage Technologies. Energies 2015, 8, 172–216. [Google Scholar] [CrossRef]
- Bae, I.; Moon, J.; Seo, J. Toward a Comfortable Driving Experience for a Self-driving Shuttle Bus. Electronics 2019, 8, 943. [Google Scholar] [CrossRef]
- Quaglietta, E. A Microscopic Simulation Model for Supporting the Design of Railway Systems: Development and Applications. Ph.D. Thesis, University of Naples Federico II, Naples, Italy, 2011. [Google Scholar]
- Francis, H.; Dressel, D.E. Electric Railway Engineering; Franklin Classics Trade Press: New York, NY, USA, 2018. [Google Scholar]
- Mayrink, S., Jr.; Oliveira, J.G.; Dias, B.H.; Oliveira, L.W.; Ochoa, J.S.; Rosseti, G.S. Regenerative Braking for Energy Recovering in Diesel-Electric Freight Trains: A Technical and Economic Evaluation. Energies 2020, 13, 963. [Google Scholar] [CrossRef]
- Perez-Martinez, P.J.; Ivan, A.S. Energy consumption of passenger land transport modes. Energy Environ. 2010, 21, 577–600. [Google Scholar] [CrossRef]
- Khodaparastan, M.; Mohamed, A.A.; Brandauer, W. Recuperation of Regenerative Braking Energy in Electric Rail Transit Systems. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2831–2847. [Google Scholar] [CrossRef]
- Domínguez, M.; Cucala, A.; Fernández, A.; Pecharromán, R.; Blanquer, J. Energy efficiency on train control: Design of metro ATO driving and impact of energy accumulation devices. In Proceedings of the 9th World Congress on Railway Research, Lille, France, 22–26 May 2011. [Google Scholar]
- Barrero, R.; Van Mierlo, J.; Tackoen, X. Energy Savings in Public Transport. IEEE Veh. Technol. Mag. 2008, 3, 26–36. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Description | Unit | Values | Ref. |
|---|---|---|---|---|
| Mloco | Mass of the locomotive | kg | 72,000 | [20] |
| Mcarriage | Mass of the carriage | kg | 36,000 | - |
| Mpayload | Mass of the payload (50%) | kg | 16,000 | - |
| Ncarriage | Number of carriages | - | 4 | - |
| Nloco | Number of locomotives | - | 1 | - |
| Naxl | Cumulative number of axles | - | 20 | - |
| S | Front surface area | m2 | 12 | - |
| Ftrain | Maximum traction of locomotive | kN | 200 | [20] |
| Ptrain | Maximum power of locomotive | MW | 3.5 | [20] |
| Pstorage | Power limit of the FESS | MW | 1–1.5–2–2.8 | - |
| ηDC | Substation to wheel efficiency | - | 0.8 | [23] |
| ηFW | Flywheel total-total efficiency | - | 0.95 | [31,32] |
| pemp | Empirical mass factor | % | 8 | [23] |
| Maximum speed | m/s | 44.5 | - | |
| â | Maximum acceleration | m/s2 | 1.1 | [33] |
| d | Deceleration | m/s2 | 0.6 | [34,35] |
| Top Speed m/s | EFESS [kWh] | ε | ϵ | ||
|---|---|---|---|---|---|
| 12.5 | 856.5 | 290.1 | 275.6 | 0.257 | 0.608 |
| 18.25 | 1490 | 612 | 581.3 | 0.312 | 0.608 |
| 25 | 2308 | 1043 | 990.4 | 0.343 | 0.608 |
| 31.25 | 3122 | 1475 | 1371 | 0.358 | 0.605 |
| 44.5 | 4209 | 2083 | 1816 | 0.356 | 0.557 |
| Top Speed m/s | EFESS [kWh] | ε | ϵ | ||
|---|---|---|---|---|---|
| 12.5 | 1052 | 423 | 401.9 | 0.305 | 0.608 |
| 18.25 | 1600 | 678 | 644.1 | 0.322 | 0.608 |
| 25 | 2381 | 1088 | 1028 | 0.345 | 0.605 |
| 31.25 | 3131 | 1475 | 1371 | 0.349 | 0.592 |
| 44.5 | 4230 | 2097 | 1799 | 0.340 | 0.549 |
| Top Speed m/s | EFESS [kWh] | ε | ϵ | ||
|---|---|---|---|---|---|
| 12.5 | 1785 | 885.7 | 841.4 | 0.377 | 0.608 |
| 18.25 | 2160 | 1052 | 995.7 | 0.369 | 0.606 |
| 25 | 2785 | 1320 | 1223 | 0.351 | 0.593 |
| 31.25 | 3359 | 1611 | 1438 | 0.342 | 0.571 |
| 44.5 | 4445 | 2219 | 1743 | 0.314 | 0.503 |
| Gradient | ||
|---|---|---|
| 0% | 0.054 | 0.017 |
| 1% | 0.058 | 0.019 |
| 3% | 0.078 | 0.029 |
| Gradient | ||
|---|---|---|
| 0% | 0.112 | 0.041 |
| 1% | 0.112 | 0.040 |
| 3% | 0.122 | 0.042 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Canova, A.; Campanelli, F.; Quercio, M. Flywheel Energy Storage System in Italian Regional Transport Railways: A Case Study. Energies 2022, 15, 1096. https://doi.org/10.3390/en15031096
Canova A, Campanelli F, Quercio M. Flywheel Energy Storage System in Italian Regional Transport Railways: A Case Study. Energies. 2022; 15(3):1096. https://doi.org/10.3390/en15031096
Chicago/Turabian StyleCanova, Aldo, Federico Campanelli, and Michele Quercio. 2022. "Flywheel Energy Storage System in Italian Regional Transport Railways: A Case Study" Energies 15, no. 3: 1096. https://doi.org/10.3390/en15031096
APA StyleCanova, A., Campanelli, F., & Quercio, M. (2022). Flywheel Energy Storage System in Italian Regional Transport Railways: A Case Study. Energies, 15(3), 1096. https://doi.org/10.3390/en15031096