
Finite Control Set Model-Free Predictive Current Control of a Permanent Magnet Synchronous Motor


Abstract
:1. Introduction
2. PMSM System Model Description
2.1. Mathematical Model of Permanent Magnet Synchronous Motor
2.2. PMSM Hyperlocal Model
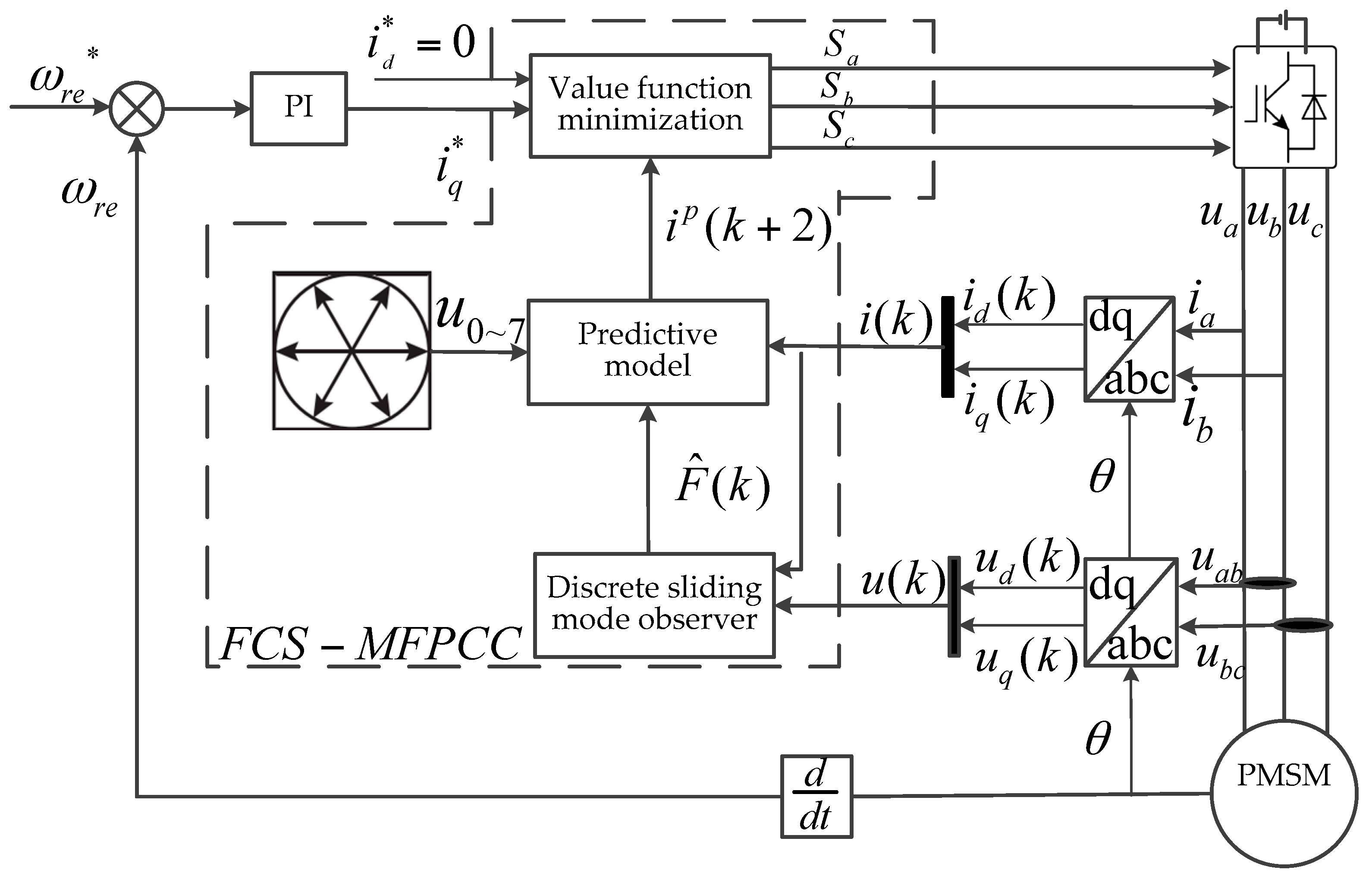
3. PMSM Model-Free Predictive Current Control
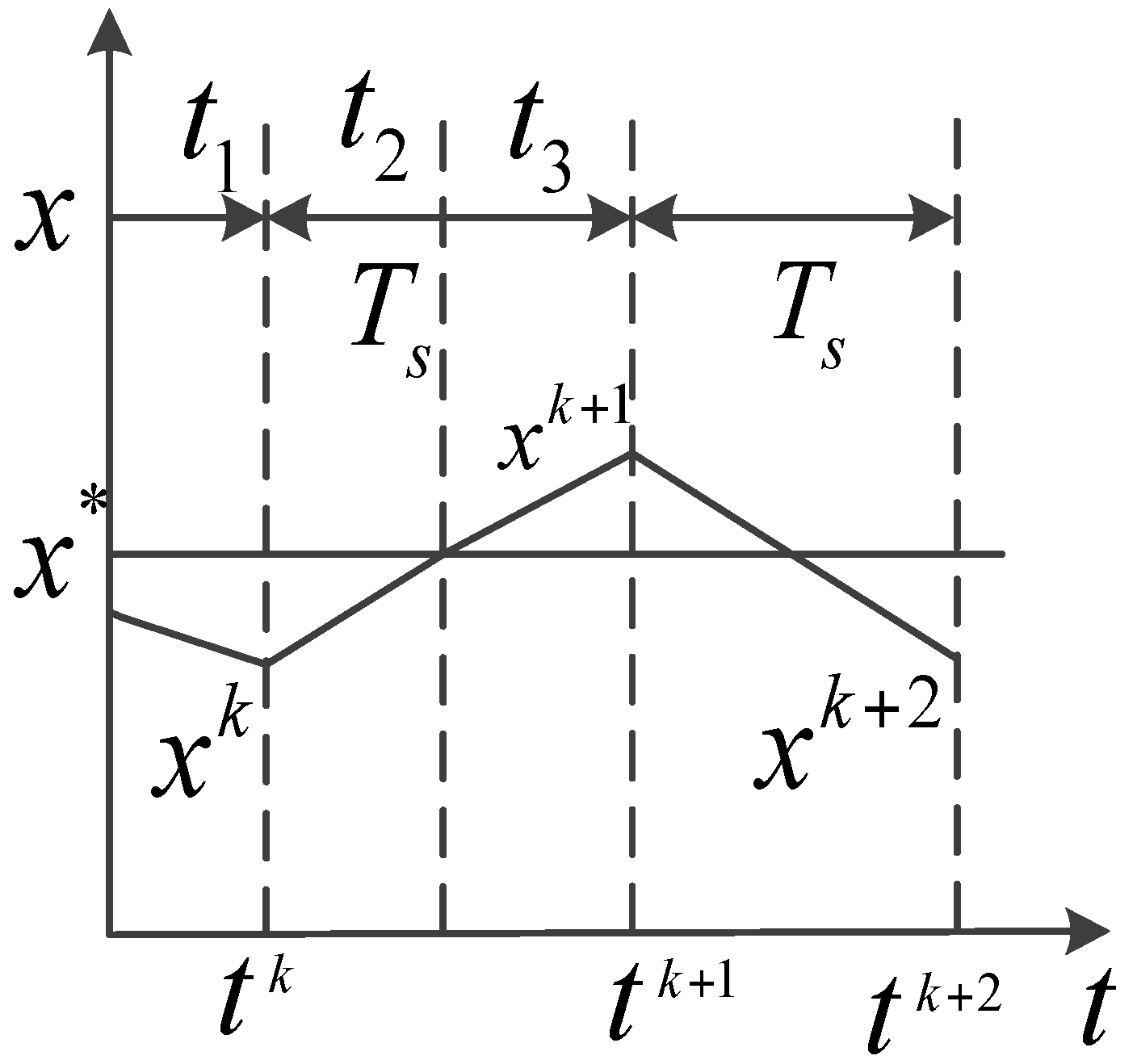
3.1. Model-Free Deadbeat Prediction Current Control Algorithm
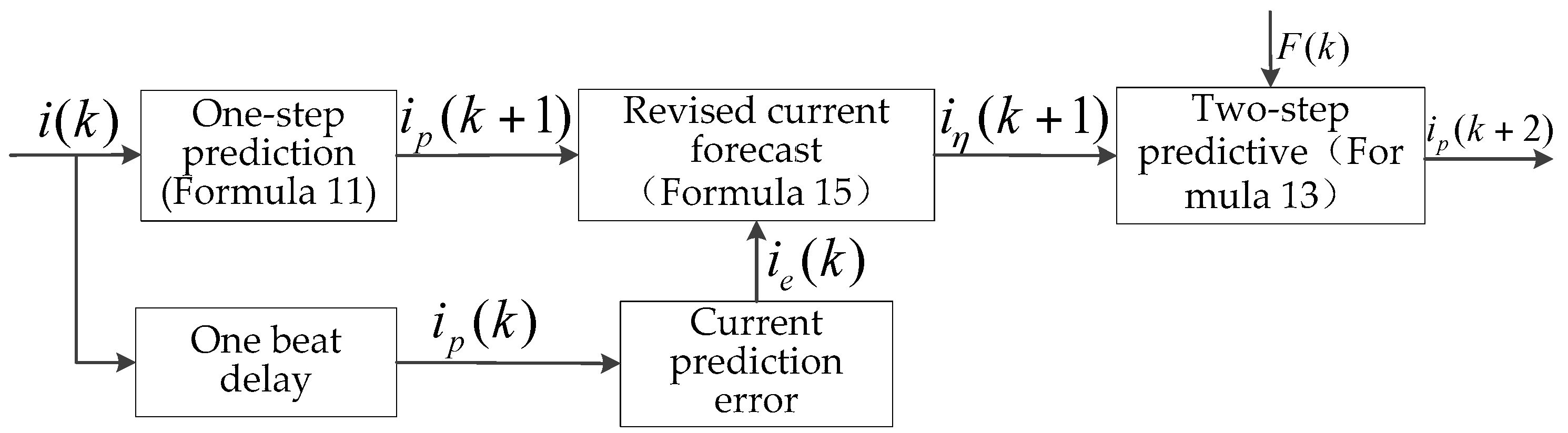
3.2. Predicted Current Error Feedback Compensation
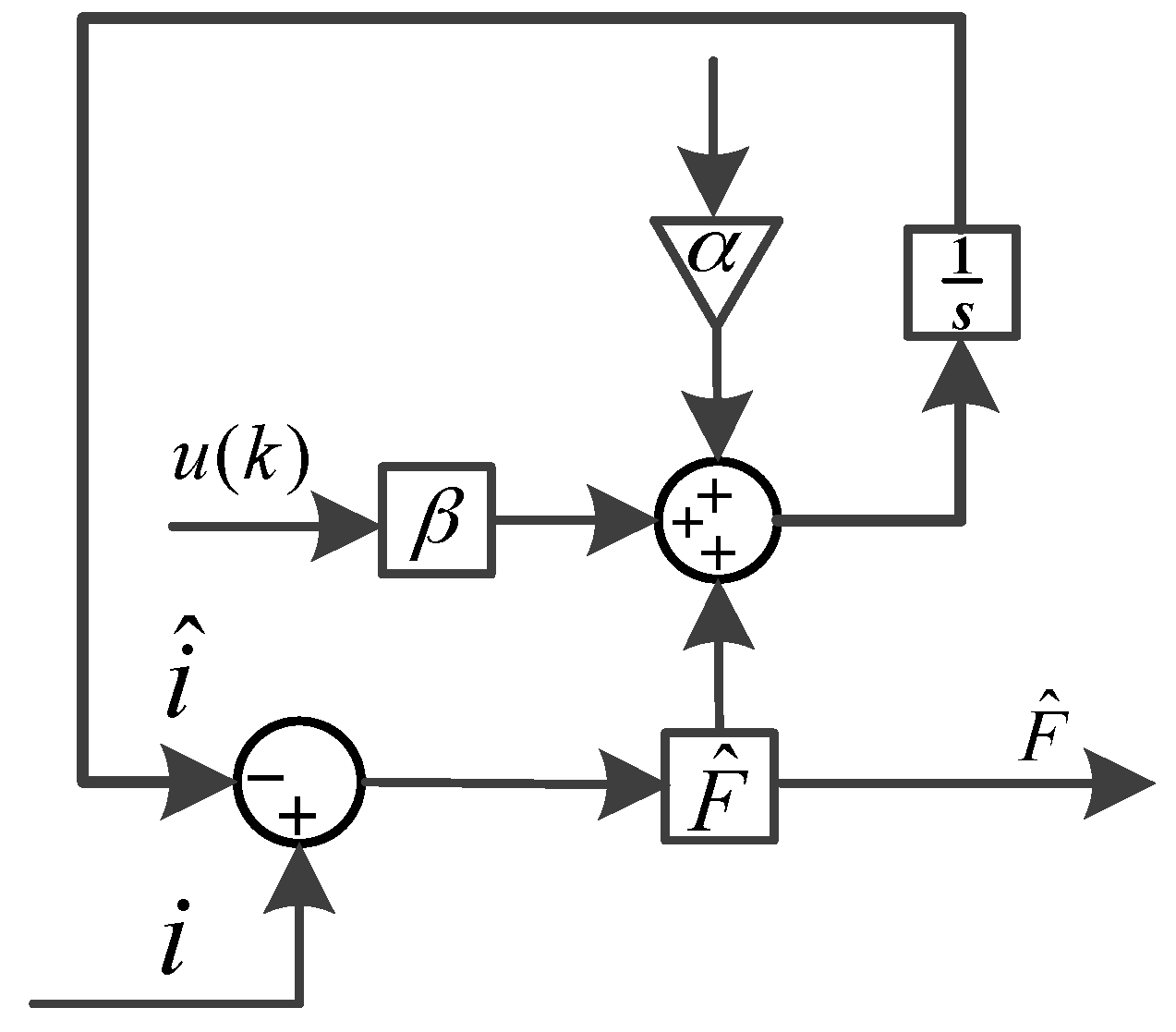
4. Design of the Extended Sliding Mode Observer
4.1. Design of the Sliding Mode Observer
4.2. Discretization of Sliding Mode Observer
- According to Equations (17) and (18), the current error variable is solved at time ;
- The unknown quantity is observed through the sliding mode observer (Equation (25));
- The current value of the present period is predicted through the voltage value and actual current value at time ;
- The predicted current value is corrected according to Equation (15) to obtain , ;
- The observed is substituted into Equations (11) and (13) to obtain the predicted current values and at time ;
- According to the principle of the minimum value of the value function, the optimal voltage vector corresponding to the minimum value of Equation (16) is selected to be used in the inverter.
5. Simulation Results and Discussion
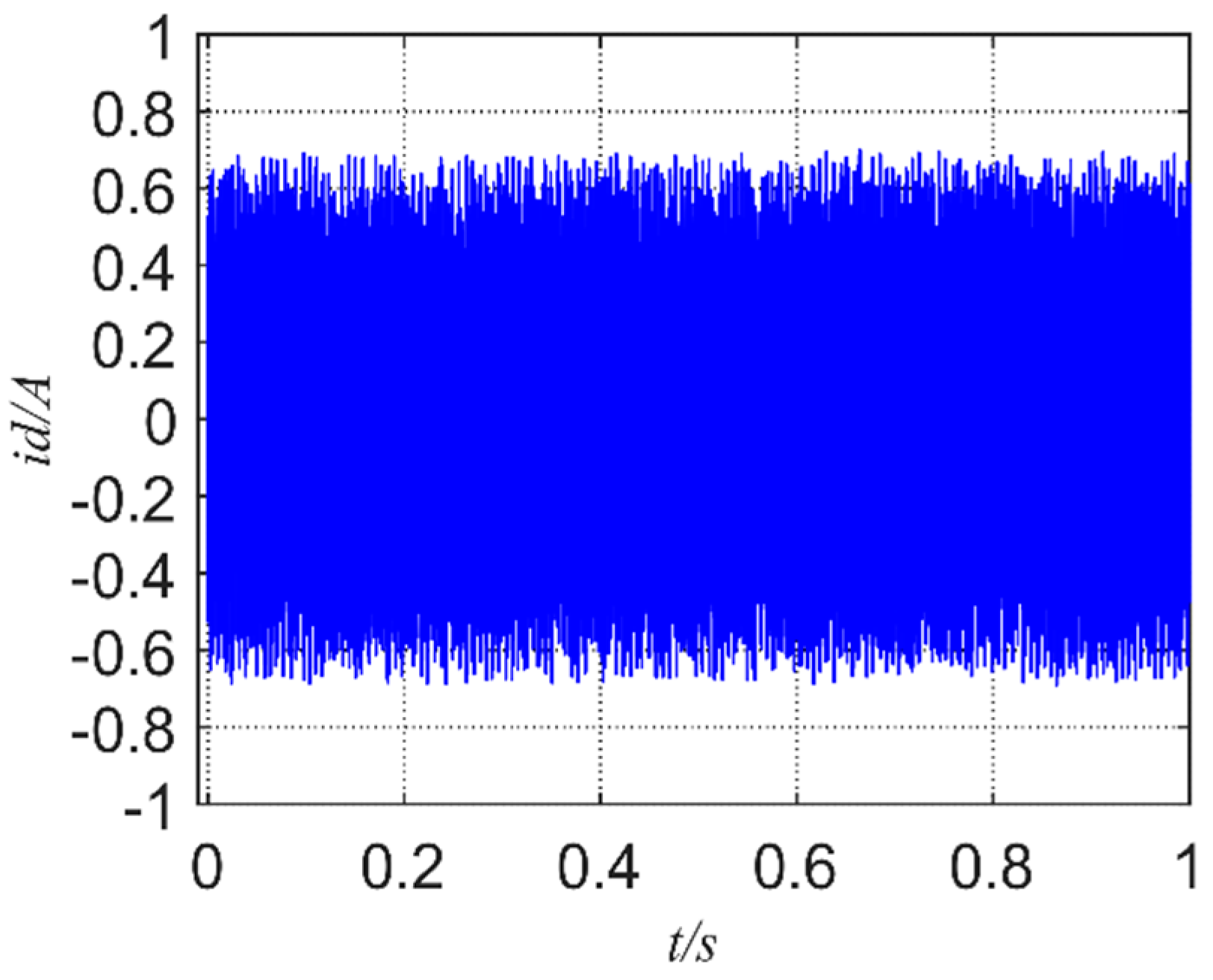
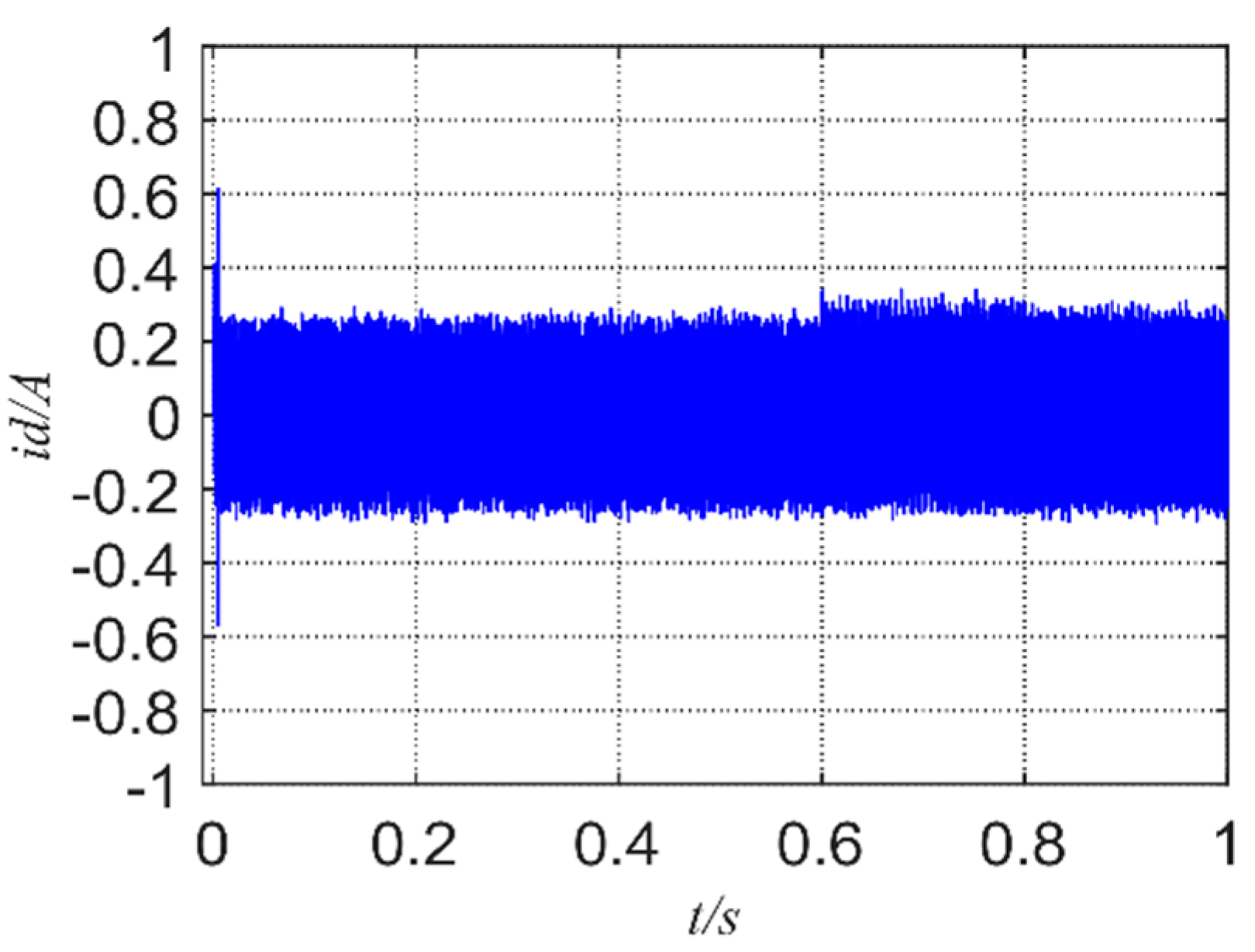
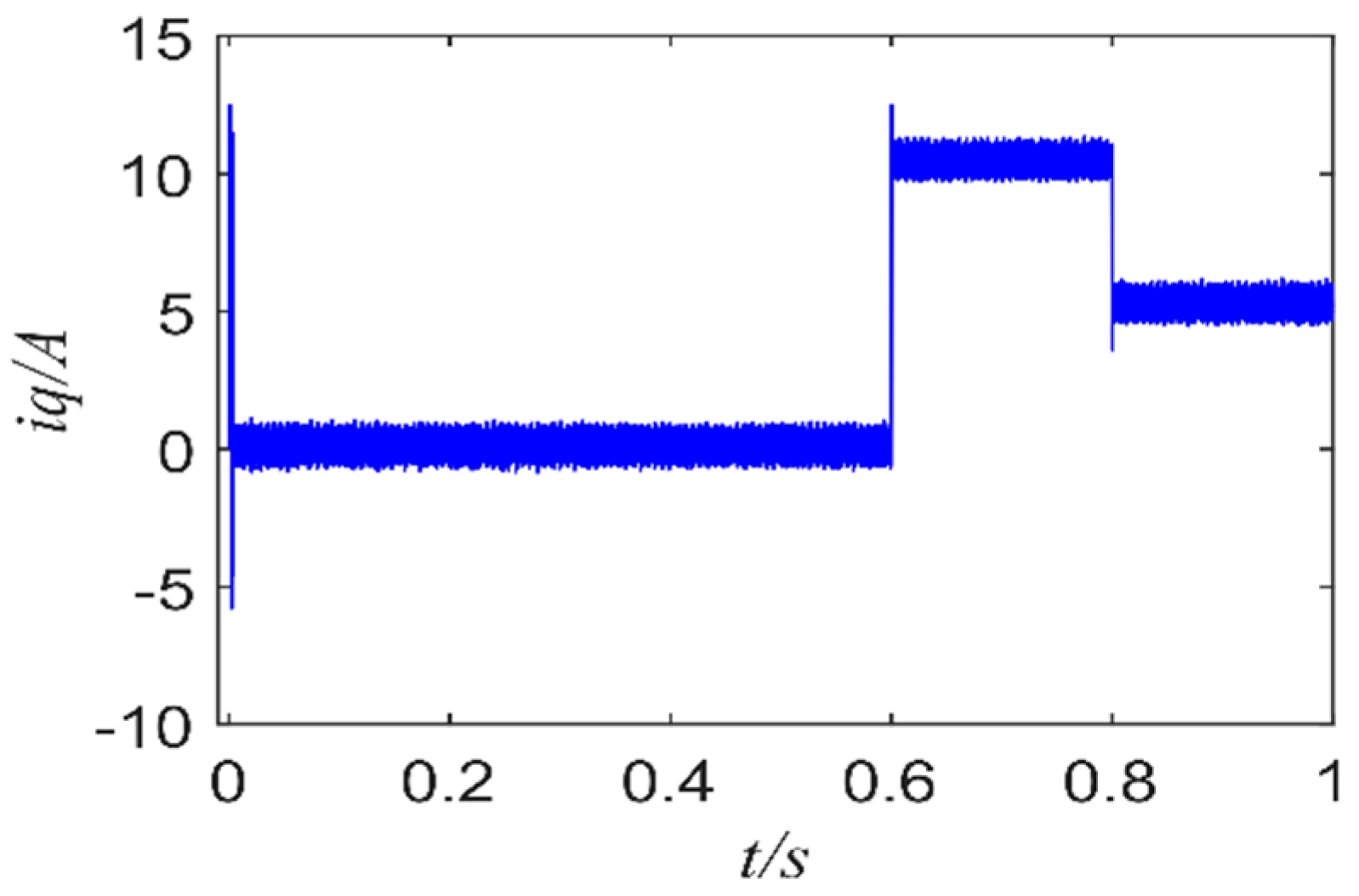
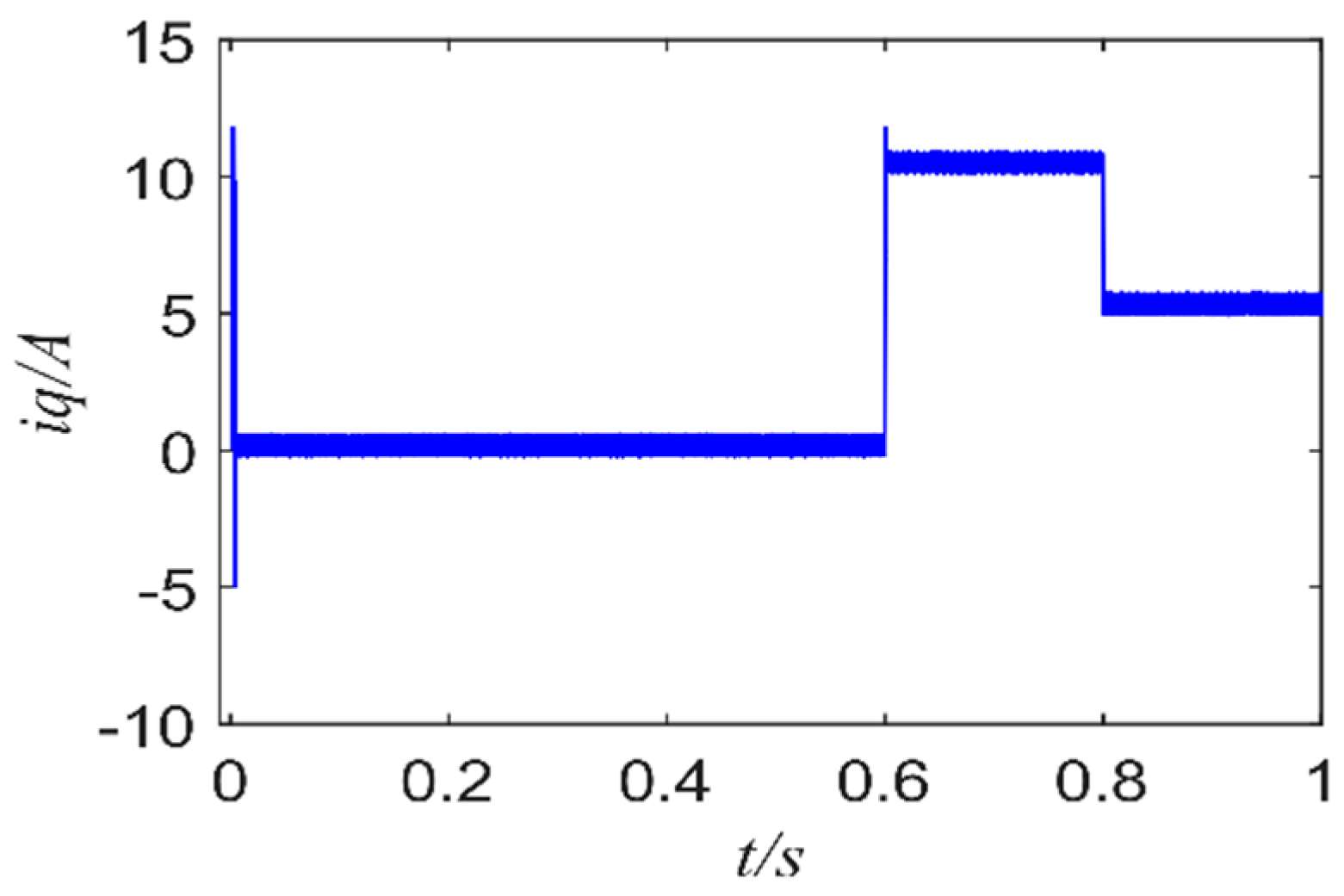
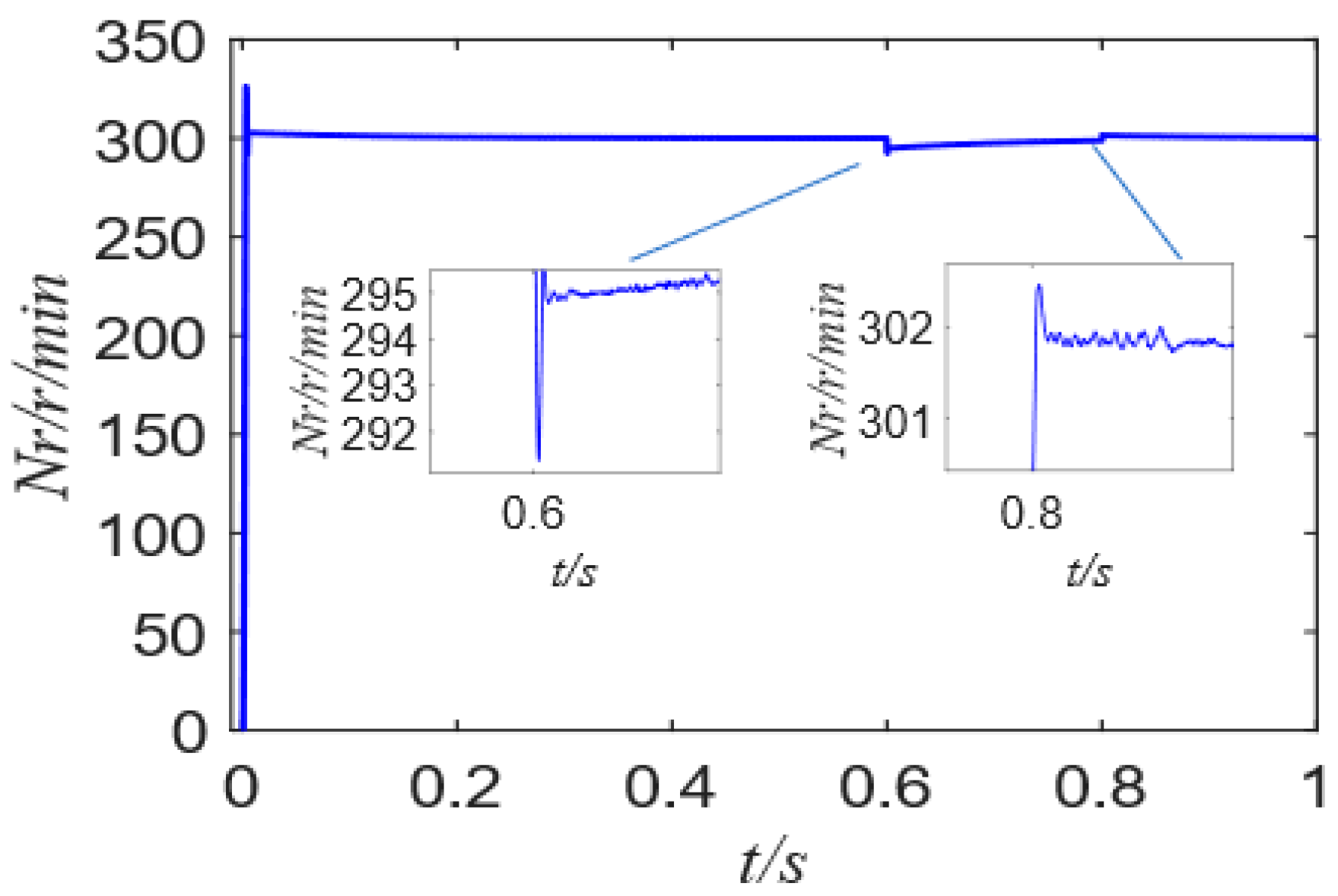
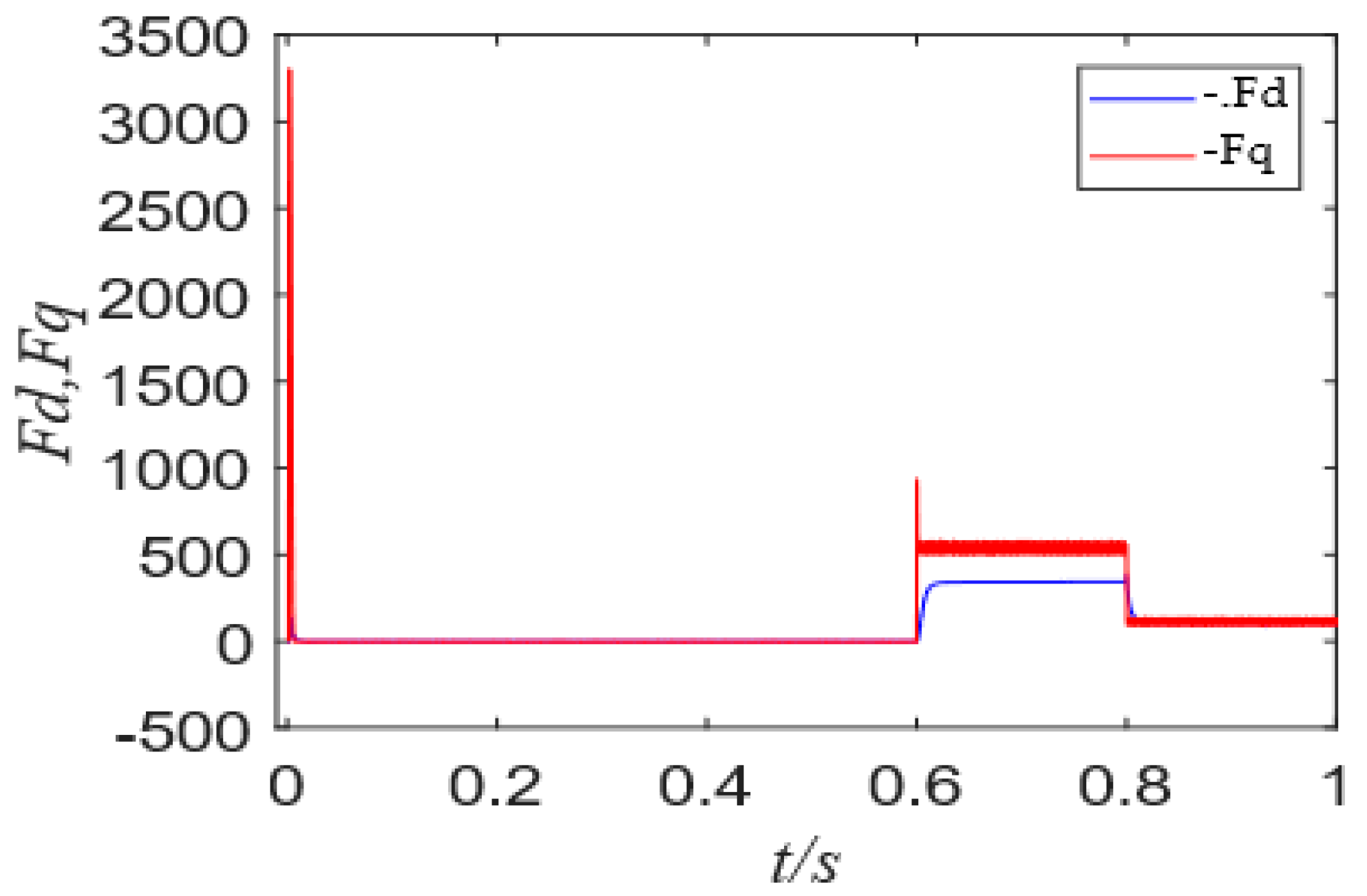
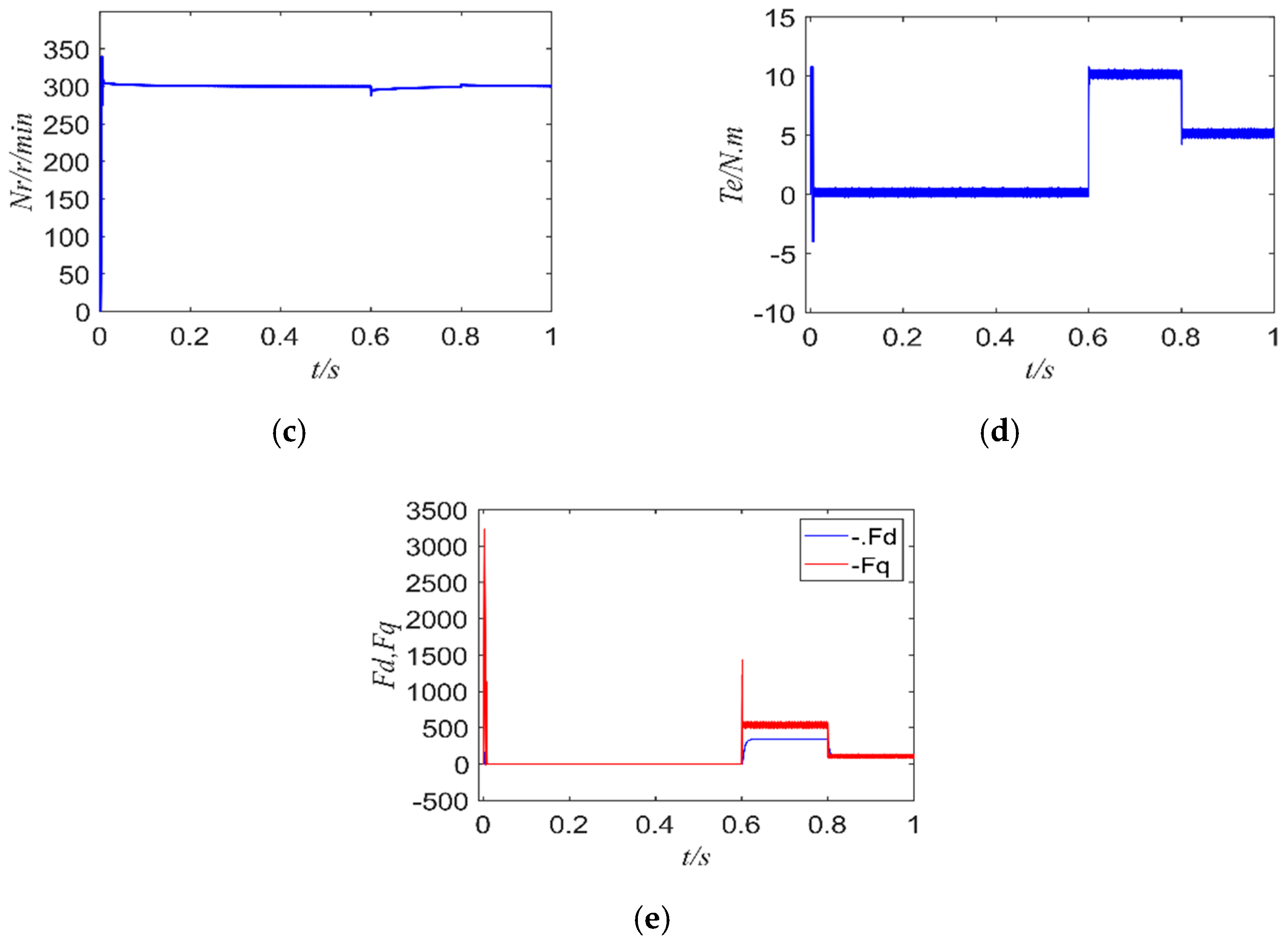
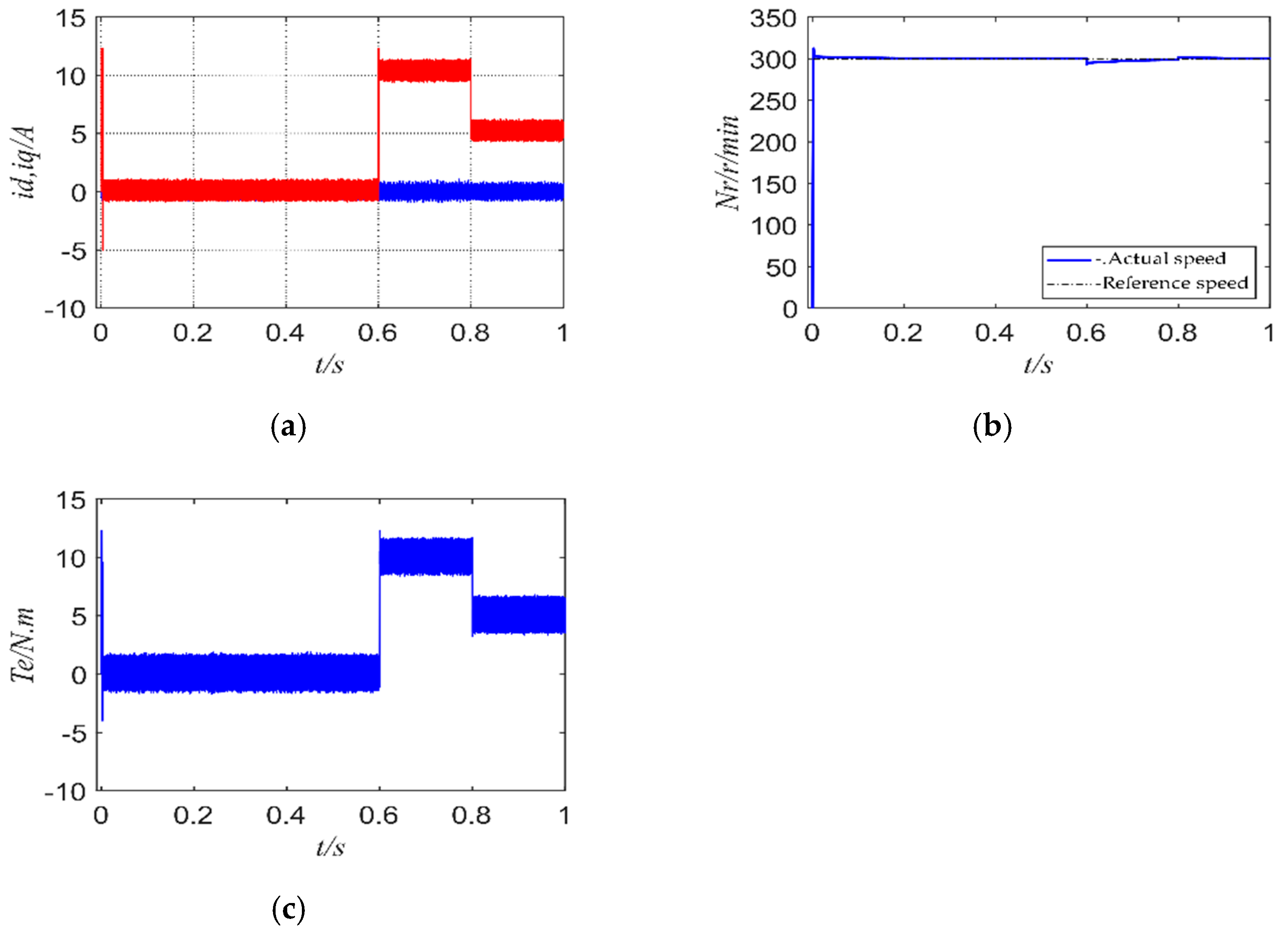
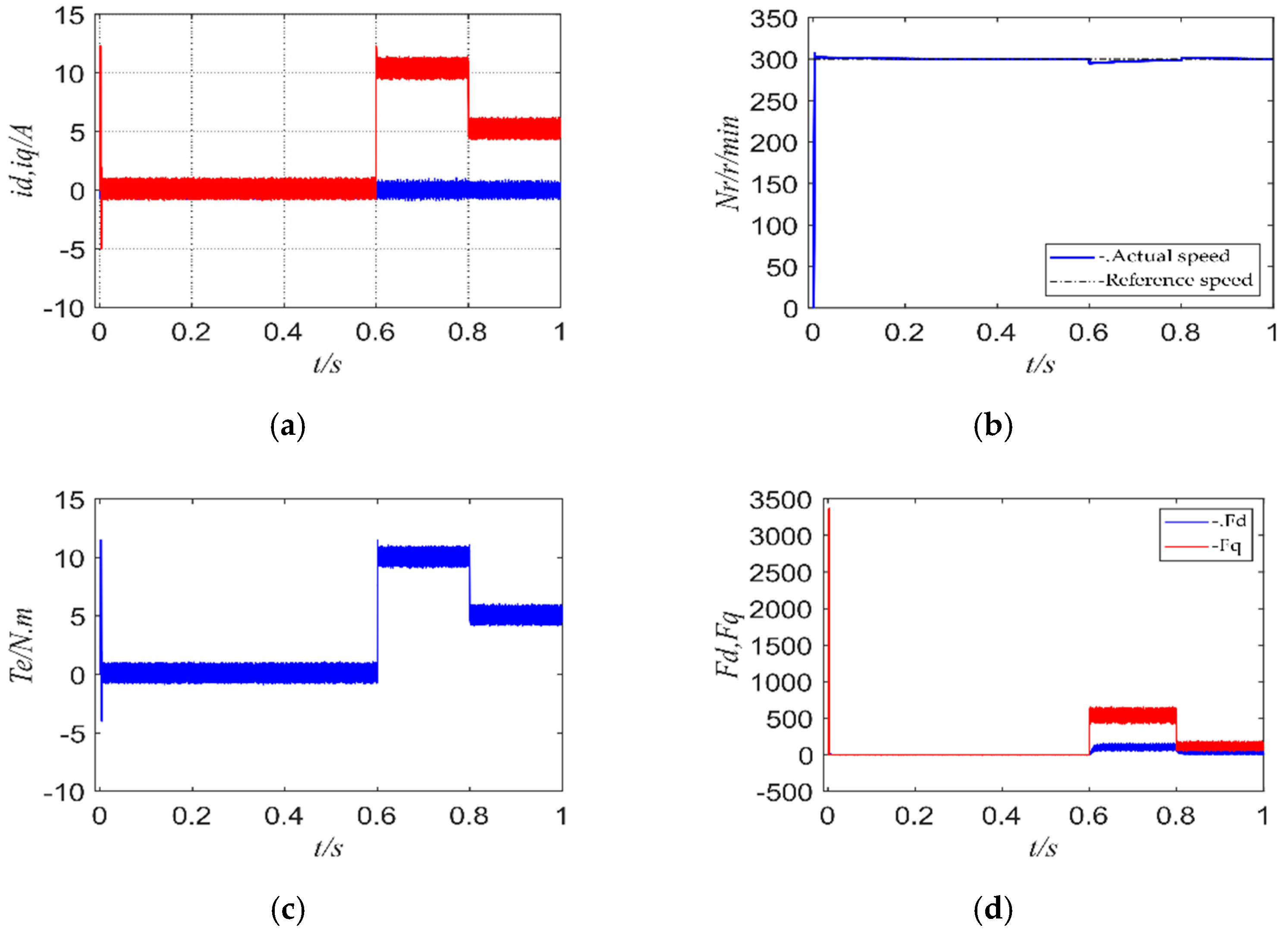
5.1. Simulation Results and Discussion of PMSM under Normal Parameters
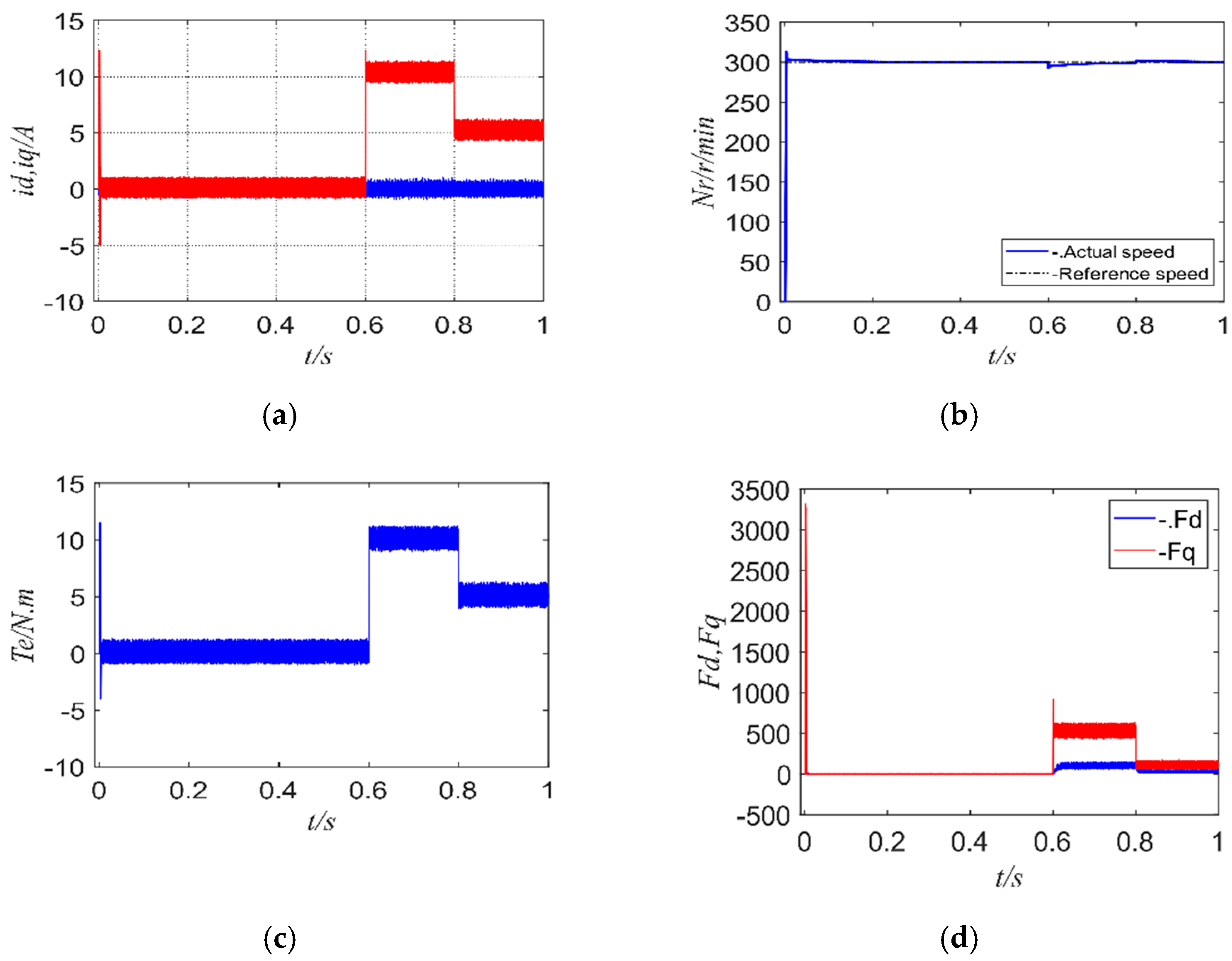
5.2. Simulation Results and Discussion of PMSM under Parameter Perturbation
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ismagilov, F.; Vavilov, V.; Gusakov, D.; Uzhegov, N. Topology Selection of the High-speed High-voltage PMSM for Aerospace Application. In Proceedings of the IECON 2017—43RD Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; Volume 10, pp. 2219–2224. [Google Scholar]
- Yuan, G.G.; Guo, R.S.; Sun, J.Y. The Application of PMSM in Motor Drive Control System of patrol Robot. Int. J. Control Automation. 2016, 9, 303–308. [Google Scholar] [CrossRef]
- Li, X.Q.; Meng, D.Z.; Yang, J.Q. Research on Decoupling Technology of Permanent Magnet Synchronous Motor Braking Current of Electric Vehicle Based on Identity Matrix. Large Electr. Mach. Hydraul. Turbine 2021, 4, 19–23+34. [Google Scholar]
- Zhao, K.H.; Li, P.; Zhang, C.F.; Li, X.F.; He, J.; Lin, Y.L. Sliding mode observer-based current sensor fault reconstruction and unknown load disturbance estimation for PMSM driven system (Article). Sensors 2017, 17, 2833. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhu, L.; Wen, X.H.; Zhao, F.; Kong, L. Control policies to prevent PMSMs from losing control under field-weakening operation. Proc. Chin. Soc. Electr. Eng. 2011, 31, 67–72. [Google Scholar]
- Li, Y.; Huang, H.B.; Cheng, S.Q.; Zhao, Y.; Wu, W.L. Design of MTPA control system for permanent magnet synchronous motor. J. Hubei Automot. Ind. Inst. 2021, 35, 65–70. [Google Scholar]
- Nasr, A.; Gu, C.; Bozhko, S.; Gerada, C. Performance Enhancement of Direct Torque-Controlled Permanent Magnet Synchronous Motor with a Flexible Switching Table. Energies 2020, 13, 1907. [Google Scholar] [CrossRef] [Green Version]
- Karlovsky, P.; Lettl, J. Induction Motor Drive Direct Torque Control and Predictive Torque Control Comparison Based on Switching Pattern Analysis. Energies 2018, 11, 1793. [Google Scholar] [CrossRef] [Green Version]
- Bouguenna, I.F.; Tahour, A.; Kennel, R.; Abdelrahem, M. Multiple-Vector Model Predictive Control with Fuzzy Logic for PMSM Electric Drive Systems. Energies 2021, 14, 1727. [Google Scholar] [CrossRef]
- Shi, J.X.; Xie, Z.X.; Chen, Z.Y.; Qiu, J.Q. Parameter-free hyperlocal model predictive control of permanent magnet synchronous motors. J. Electric Mach. Control 2021, 25, 1–8. [Google Scholar]
- Yang, F.; Hu, M.M.; Chen, X. Improved dual vector model predictive current control for permanent magnet synchronous motors. Mot. Control Appl. 2021, 48, 21–26. [Google Scholar]
- Zhang, Y.Q.; Yin, Z.G.; Li, W.; Liu, J.; Zhang, Y.P. Adaptive Sliding-Mode-Based Speed Control in Finite Control Set Model Predictive Torque Control for Induction Motors. IEEE Trans. Power Electron. 2021, 36, 8076–8087. [Google Scholar] [CrossRef]
- Guo, Z.H.; Zhu, J.G. Sliding mode control of six-phase permanent magnet synchronous motor based on a new approaching law. Large Electr. Mach. Hydraul. Turbine 2020, 2, 1–6. [Google Scholar]
- Pedapenki, K.K.; Kumar, J.; Anumeha. Fuzzy Logic Controller-Based BLDC Motor Drive. In Recent Advances in Power Electronics and Drives; Springer: Singapore, 2020; Volume 707, pp. 379–388. [Google Scholar]
- Jin, F.Z.; Wan, H.; Huang, Z.F.; Gu, M.X. PMSM Vector Control Based on Fuzzy PID Controller. J. Phys. Conf. Ser. 2020, 1617, 012016. [Google Scholar] [CrossRef]
- Yang, X.W.; Deng, W.X.; Yao, J.Y. Neural network based output feedback control for DC motors with asymptotic stability. Mech. Syst. Signal Processing 2022, 164, 108288. [Google Scholar] [CrossRef]
- Xu, Y.Z.; Yang, J.B.; Fang, L. Permanent magnet synchronous motor power supply imbalance and phase loss fault diagnosis based on artificial neural network. Large Electr. Mach. Hydraul. Turbine 2016, 4, 1–5+9. [Google Scholar]
- Zhong, Z.Z. Research on Predictive Current Control of Permanent Magnet Synchronous Motor with Finite Set Model; Guangdong University of Technology: Guangdong, China, 2020. [Google Scholar]
- Bao, G.Q.; Qi, W.G.; He, T. Direct Torque Control of PMSM with Modified Finite Set Model Predictive Control. Energies 2020, 13, 234. [Google Scholar] [CrossRef] [Green Version]
- Yao, X.L.; Ma, C.W.; Wang, J.F.; Huang, C.Q. Robust permanent magnet synchronous motor model predictive current control based on prediction error compensation. Proc. Chin. Soc. Electr. Eng. 2021, 41, 6071–6081. [Google Scholar]
- Liu, J.Q.; Hao, W.J.; Chen, A.F.; Tian, J.H. Research on deadbeat predictive current control strategy of permanent magnet synchronous motors. J. China Railw. Soc. 2021, 43, 62–72. [Google Scholar]
- He, C. Permanent Magnet Synchronous Motor Model Predictive Current Control Based on Finite Control Set; Harbin Institute of Technology: Harbin, China, 2019. [Google Scholar]
- You, Z.C.; Huang, C.H.; Yang, S.M. Online Current Loop Tuning for Permanent Magnet Synchronous Servo Motor Drives with Deadbeat Current Control. Energies 2019, 12, 3555. [Google Scholar] [CrossRef] [Green Version]
- Bozorgi, A.M.; Farasat, M.; Jafarishiadeh, S. Model predictive current control of surfacemounted permanent magnet synchronous motor with low torque and current ripple. IET Power Electron. 2017, 10, 1120–1128. [Google Scholar] [CrossRef]
- Luo, X.; Shen, A.; Tang, Q.P.; Liu, J.C.; Xu, J.B. Two-Step Continuous-Control Set Model Predictive Current Control Strategy for SPMSM Sensorless Drives. In Proceedings of the IEEE Transactions on Energy Conversion, Trieste, Italy, 5 August 2020; pp. 1110–1120. [Google Scholar]
- Fliess, M.; Join, C. Model-free control. Int. J. Control 2013, 86, 2228–2252. [Google Scholar] [CrossRef] [Green Version]
- Zhao, K.H.; Dai, W.K.; Zhou, R.R.; Leng, A.J.; Liu, W.C.; Qiu, P.Q.; Huang, G.; Wu, G.P. New model-free sliding mode control of permanent magnet synchronous motor based on extended sliding mode disturbance observer. Proc. Chin. Soc. Electr. Eng. 2021, 59, 1–13. Available online: http://kns.cnki.net/kcms/detail/11.2107.TM.20210824.1016.002.html (accessed on 27 November 2021).
- Zhao, K.H.; Zhou, R.R.; Leng, A.J.; Dai, W.K.; Huang, G. A finite set model-free fault-tolerant predictive control algorithm for permanent magnet synchronous motors. Trans. China Electrotech. Soc. 2021, 36, 27–38. [Google Scholar]
- Su, G.J.; Li, H.M.; Li, Z.; Zhou, Y.N. Model-free current control of permanent magnet synchronous linear motors. Trans. China Electrotech. Soc. 2021, 36, 3182–3190. [Google Scholar]
- Wang, Y.Q.; Zhu, Y.C.; Feng, Y.T.; Tian, B. A new approaching law sliding mode control strategy for permanent magnet synchronous motors. Electr. Power Autom. Equip. 2021, 41, 192–198. [Google Scholar]
- Hou, L.M.; He, P.Y.; Wang, W.; Yan, X.; Tu, N.W. Research on PMSM model-free adaptive sliding mode control based on ESO. Control Eng. China 2021, 28, 1–8. [Google Scholar]
- Shao, M.; Deng, Y.; Li, H.; Liu, J.; Fei, Q. Sliding Mode Observer-Based Parameter Identification and Disturbance Compensation for Optimizing the Mode Predictive Control of PMSM. Energies 2019, 12, 1857. [Google Scholar] [CrossRef] [Green Version]
- Lyu, M.; Wu, G.; Luo, D.; Rong, F.; Huang, S. Robust Nonlinear Predictive Current Control Techniques for PMSM. Energies 2019, 12, 443. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.C.; Jin, J.L.; Huang, L.L. Model-Free Predictive Current Control of PMSM Drives Based on Extended State Observer Using Ultralocal Model. IEEE Trans. Ind. Electron. 2021, 68, 993–1003. [Google Scholar] [CrossRef]
- Zhang, X.G.; Zhang, L.; Zhang, Y.C. Model Predictive Current Control for PMSM Drives with Parameter Robustness Improvement. IEEE Trans. Power Electron. 2019, 34, 1645–1657. [Google Scholar] [CrossRef]
- Yuan, L.; Hu, B.X.; Wei, K.Y.; Chen, S. Modern Permanent Magnet Synchronous Motor Control Principle and Matlab Simulation; Beijing University of Aeronautics and Astronautics Press: Beijing, China, 2016. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Numerical Value |
|---|---|
| Flux induced by magnets Ψf/Wb | 0.129 |
| Stator inductance Ls/mH | 2.4 |
| d-axis inductance Ld/mH | 2.4 |
| q-axis inductance Lq/mH | 2.4 |
| Motor stator resistance Rs/Ω | 0.369 |
| Number of poles np | 5 |
| Rotor inertia J/kgm2 | 0.001916 |
| Damping coefficient Bm/Nm·rad/s | 0.00464 |
| Parameters | Ts (us) | Error (Standard Deviation) | |||
|---|---|---|---|---|---|
| No Load (0 s~0.6 s) | Load (0.6 s~0.8 s) | Load (0.8 s~1 s) | |||
| id (A) | FCS-MPCC | 10 | 0.2619 | 0.2726 | 0.2848 |
| FCS-MFPCC | 10 | 0.1283 | 0.1255 | 0.1264 | |
| FCS-MFPCC | 50 | 0.1471 | 0.1458 | 0.1442 | |
| iq (A) | FCS-MPCC | 10 | 0.8521 | 0.4387 | 0.3135 |
| FCS-MFPCC | 10 | 0.8111 | 0.2970 | 0.1900 | |
| FCS-MFPCC | 50 | 0.9054 | 0.3827 | 0.1921 | |
| Te (N·m) | FCS-MPCC | 10 | 0.7954 | 0.4244 | 0.3033 |
| FCS-MFPCC | 10 | 0.7443 | 0.2874 | 0.1838 | |
| FCS-MFPCC | 50 | 0.8302 | 0.3703 | 0.1859 | |
| Nr (r/min) | FCS-MPCC | 10 | 11.4357 | 1.1430 | 0.3226 |
| FCS-MFPCC | 10 | 12.4856 | 1.1408 | 0.3188 | |
| FCS-MFPCC | 50 | 13.5178 | 1.3176 | 0.4598 | |
| Parameters | Ts (s) | Error (Standard Deviation) | |||
|---|---|---|---|---|---|
| No Load (0 s~0.6 s) | Load (0.6 s~0.8 s) | Load (0.8 s~1 s) | |||
| id (A) | FCS-MPCC | 10 | 0.7288 | 0.7304 | 0.7218 |
| FCS-MFPCC | 10 | 0.4465 | 0.4471 | 0.4373 | |
| FCS-MFPCC | 50 | 0.2964 | 0.3208 | 0.3215 | |
| iq (A) | FCS-MPCC | 10 | 1.0583 | 0.7536 | 0.7332 |
| FCS-MFPCC | 10 | 0.8622 | 0.4474 | 0.4299 | |
| FCS-MFPCC | 50 | 0.8558 | 0.4289 | 0.3552 | |
| Te (N·m) | FCS-MPCC | 10 | 1.0273 | 0.7291 | 0.7094 |
| FCS-MFPCC | 10 | 0.8126 | 0.4328 | 0.4160 | |
| FCS-MFPCC | 50 | 0.8044 | 0.4150 | 0.3437 | |
| Nr (r/min) | FCS-MPCC | 10 | 10.9208 | 1.2563 | 0.4608 |
| FCS-MFPCC | 10 | 11.5466 | 1.2491 | 0.4588 | |
| FCS-MFPCC | 50 | 12.1640 | 1.2579 | 0.4589 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, M.; Yang, F.; Liu, Y.; Wu, L. Finite Control Set Model-Free Predictive Current Control of a Permanent Magnet Synchronous Motor. Energies 2022, 15, 1045. https://doi.org/10.3390/en15031045
Hu M, Yang F, Liu Y, Wu L. Finite Control Set Model-Free Predictive Current Control of a Permanent Magnet Synchronous Motor. Energies. 2022; 15(3):1045. https://doi.org/10.3390/en15031045
Chicago/Turabian StyleHu, Mingmao, Feng Yang, Yi Liu, and Liang Wu. 2022. "Finite Control Set Model-Free Predictive Current Control of a Permanent Magnet Synchronous Motor" Energies 15, no. 3: 1045. https://doi.org/10.3390/en15031045
APA StyleHu, M., Yang, F., Liu, Y., & Wu, L. (2022). Finite Control Set Model-Free Predictive Current Control of a Permanent Magnet Synchronous Motor. Energies, 15(3), 1045. https://doi.org/10.3390/en15031045