
Generator Fault Classification Method Based on Multi-Source Information Fusion Naive Bayes Classification Algorithm



Abstract
:1. Introduction
2. Materials and Methods
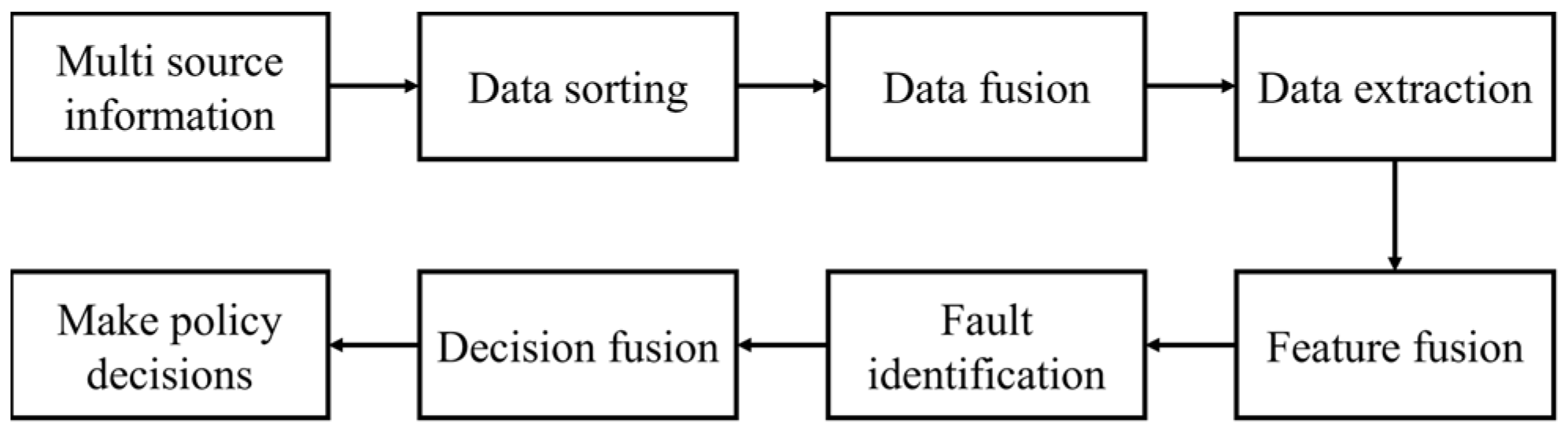
2.1. Multi-Source Information Fusion Process
- (1)
- In addition to the fault diagnosis process, many state and type evaluation processes often need to use thousands or even millions of features in order to improve the accuracy of classification and evaluation, which will not only slow the training, but also make it difficult to find the optimal solution. This problem is called dimensional disaster;
- (2)
- Data processing takes up a lot of memory. The dimension of data is too high, and the space for storing data is very large, which makes the data processing process very slow;
- (3)
- Unable to visualize decision results.
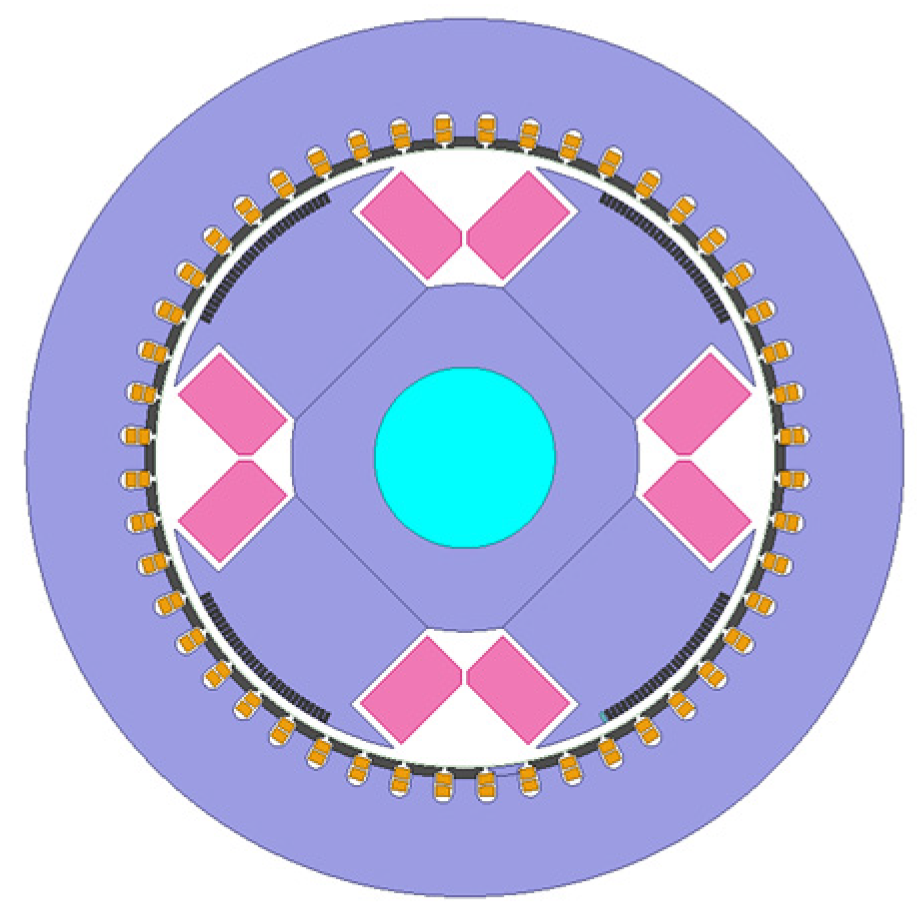
2.1.1. Characteristic Signals
2.1.2. Fuzzy Process
2.1.3. Dimensionality Reduction Process of Characteristic Signal Using PCA
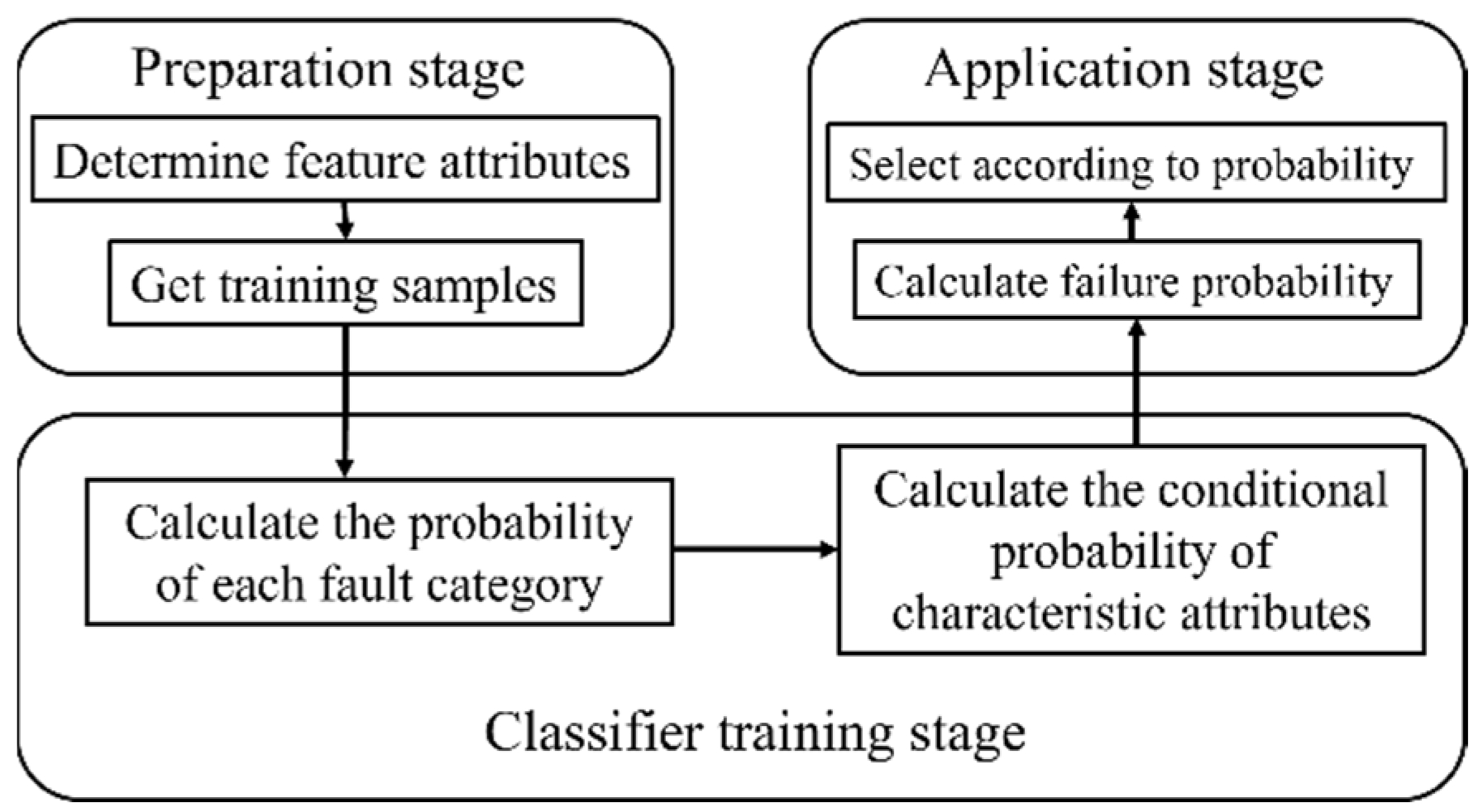
2.2. Bernoulli Naive Bayes Classification Method
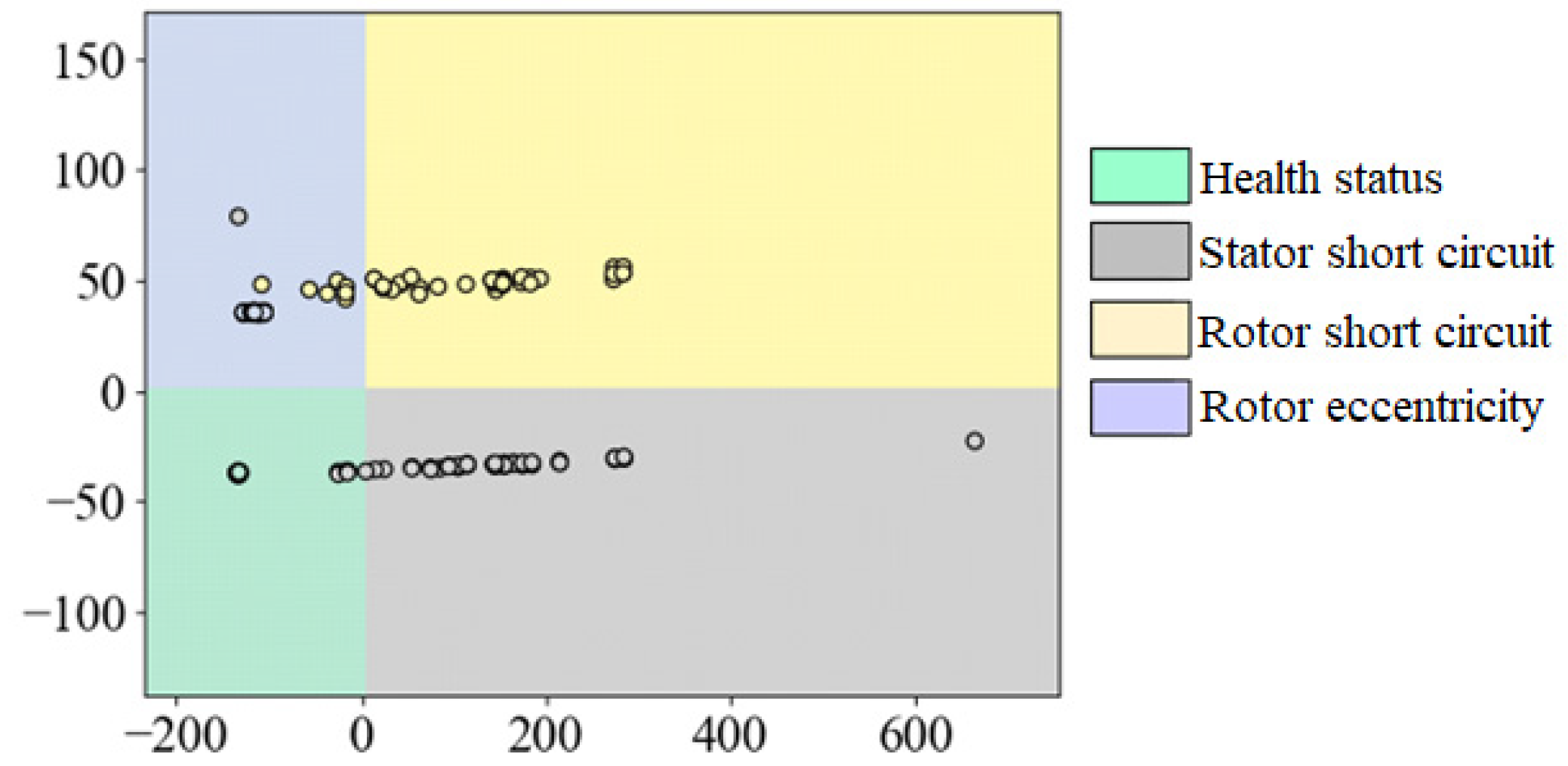
3. Results
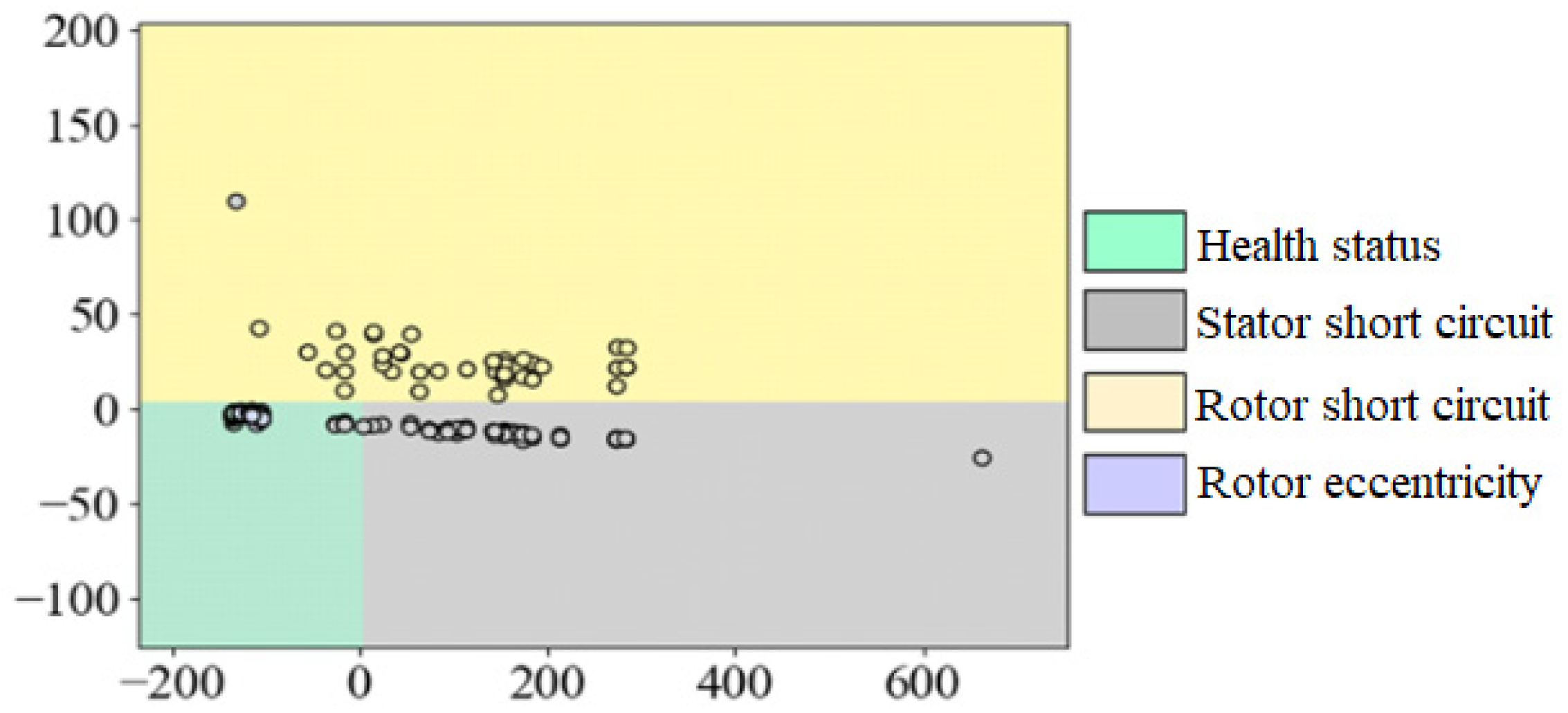
3.1. Result without the Fuzzy Process
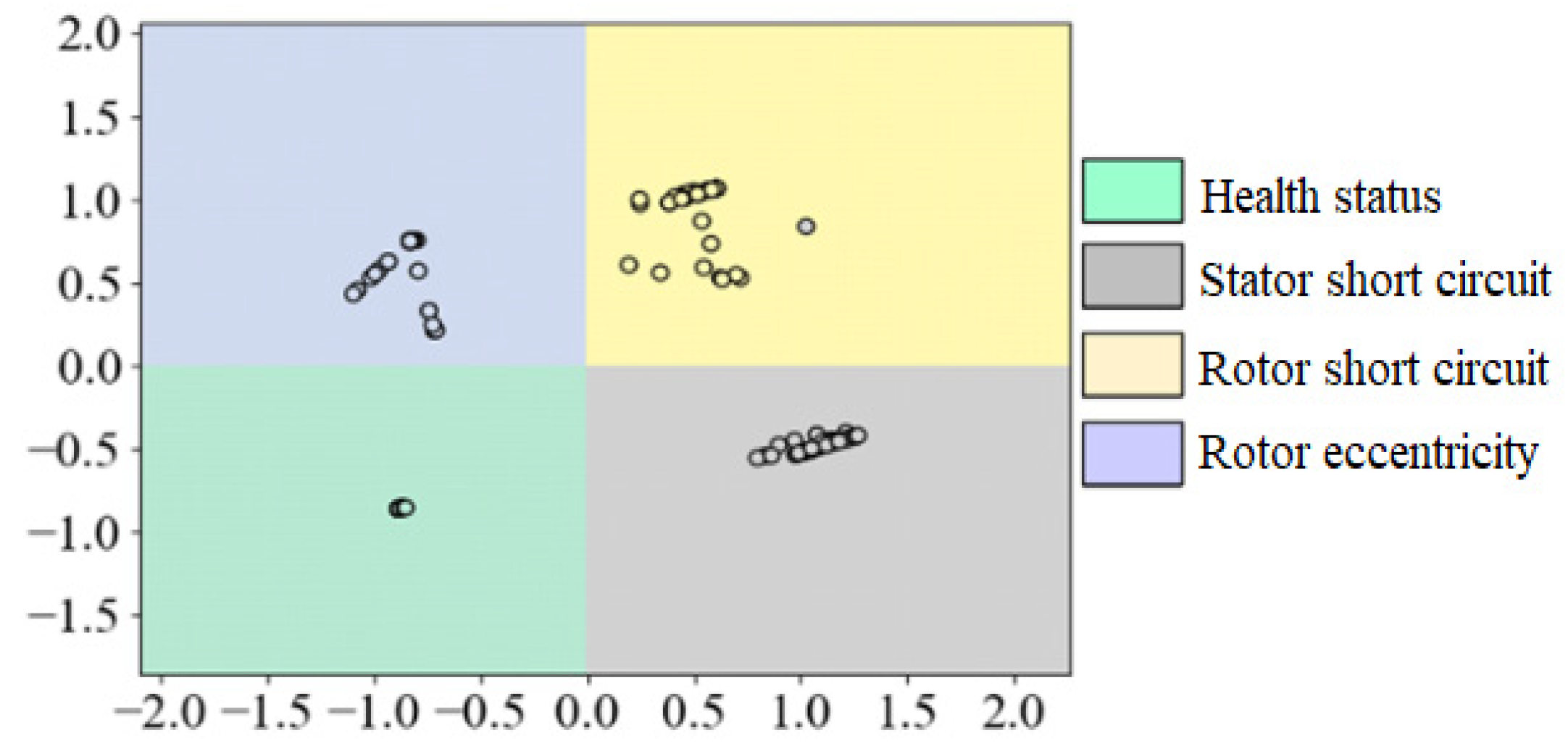
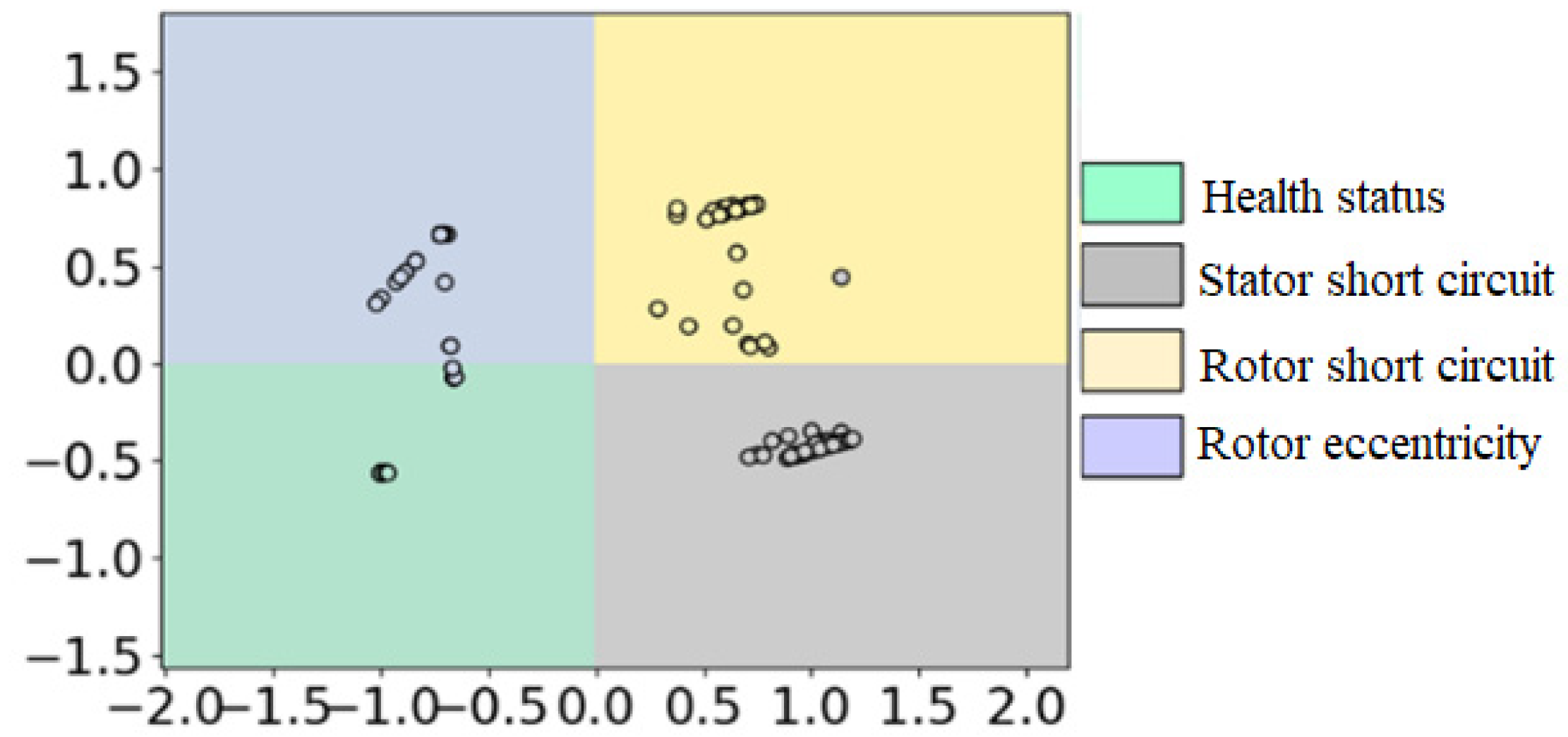
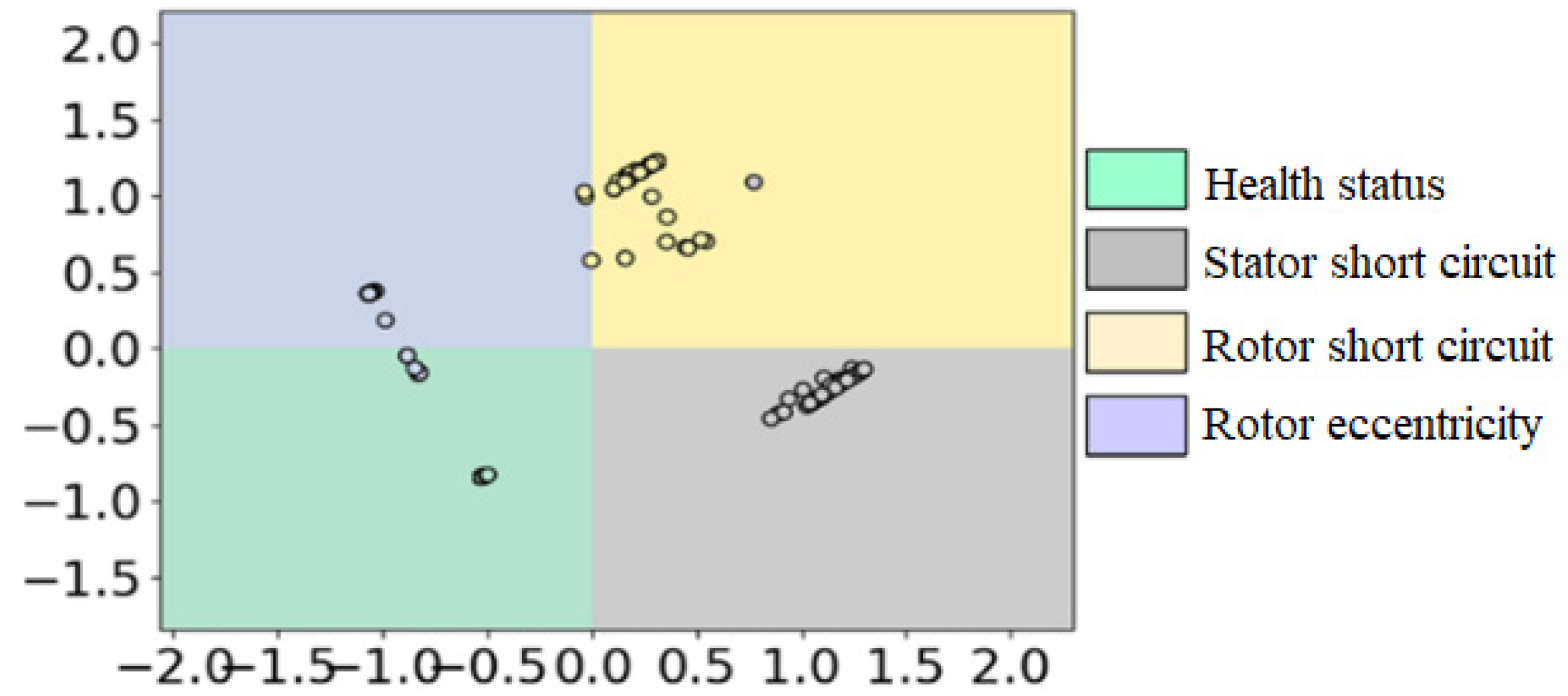
3.2. Result with the Fuzzy Process
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, G. Basic Research on Machinery Fault Diagnosis—What is the Prescription. Chin. J. Mech. Eng. 2013, 49, 63–72. [Google Scholar] [CrossRef]
- Wang, J.F.; Li, F.-C. Signal Processing Methods in Fault Diagnosis of Machinery—Analyses in Frequency Doman. Noise Vib. Control 2013, 33, 173–180. [Google Scholar]
- Rodriguez, P.; Belahcen, A.; Arkkio, A. Signatures of electrical faults in the force distribution and vibration pattern of induction motors. IEE Proc.-Electr. Power Appl. 2006, 153, 523–529. [Google Scholar] [CrossRef]
- Filippetti, F.; Franceschini, G.; Tassoni, C.; Vas, P. AI techniques in induction machines diagnosis including the speed ripple effect. IEEE Trans. Ind. Appl. 1998, 34, 98–108. [Google Scholar] [CrossRef]
- Rosero, J.; Ortega, J.; Urresty, J.; Cardenas, J.; Romeral, L. Stator Short Circuits Detection in PMSM by means of Higher Order Spectral Analysis (HOSA). In Proceedings of the 2009 Twenty-Fourth Annual IEEE Applied Power Electronics Conference and Exposition, Washington, DC, USA, 15–19 February 2009; pp. 964–969. [Google Scholar]
- Moosavi, S.S.; Djerdir, A.; Amirat, Y.A.; Khaburi, D.A. Demagnetization fault diagnosis in permanent magnet synchronous motors: A review of the state-of-the-art. J. Magn. Magn. Mater. 2015, 391, 203–212. [Google Scholar] [CrossRef]
- Leboeuf, N.; Boileau, T.; Nahid-Mobarakeh, B.; Clerc, G.; Meibody-Tabar, F. Real-Time Detection of Interturn Faults in PM Drives Using Back-EMF Estimation and Residual Analysis. IEEE Trans. Ind. Appl. 2011, 47, 2402–2412. [Google Scholar] [CrossRef]
- Mohagheghi, S.; Harley, R.G.; Habetler, T.G.; Divan, D. Condition Monitoring of Power Electronic Circuits Using Artificial Neural Networks. IEEE Trans. Power Electron. 2009, 24, 2363–2367. [Google Scholar] [CrossRef]
- Riba Ruiz, J.-R.; Rosero, J.A.; Espinosa, A.G.; Romeral, L. Detection of Demagnetization Faults in Permanent-Magnet Synchronous Motors Under Nonstationary Conditions. IEEE Trans. Magn. 2009, 45, 2961–2969. [Google Scholar] [CrossRef]
- Wu, K.; Huang, Z.; Wang, Z.; Hu, X. A kind of fault diagnosis research based on improved SOM-BP composite neural network. In Proceedings of the 2014 IEEE 5th International Conference on Software Engineering and Service Science, Beijing, China, 27–29 June 2014; pp. 465–467. [Google Scholar]
- Betta, G.; Liguori, C.; Pietrosanto, A. An advanced neural-network-based instrument fault detection and isolation scheme. IEEE Trans. Instrum. Meas. 1998, 47, 507–512. [Google Scholar] [CrossRef]
- Moosavi, S.S.; Djerdir, A.; Ait-Amirat, Y.; Khaburi, D.A. ANN based fault diagnosis of permanent magnet synchronous motor under stator winding shorted turn. Electr. Power Syst. Res. 2015, 125, 67–82. [Google Scholar] [CrossRef]
- Quiroga, J.; Li, L.; Cartes, D.A. Fuzzy logic based fault detection of PMSM stator winding short under load fluctuation using negative sequence analysis. In Proceedings of the 2008 American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 4262–4267. [Google Scholar]
- Liu, L.; Liu, W.; Cartes, D.A. Permanent Magnet Synchronous Motor Parameter Identification using Particle Swarm Optimization. Int. J. Comput. Intell. Res. 2008, 4, 211–218. [Google Scholar] [CrossRef]
- Pandarakone, S.E.; Gunasekaran, S.; Mizuno, Y.; Nakamura, H. Application of Naive Bayes Classifier Theorem in Detecting Induction Motor Bearing Failure. In Proceedings of the 2018 XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018; pp. 1761–1767. [Google Scholar] [CrossRef]
- Hajnayeb, A.; Ghasemloonia, A.; Khadem, S.; Moradi, M. Application and comparison of an ANN-based feature selection method and the genetic algorithm in gearbox fault diagnosis. Expert Syst. Appl. 2011, 38, 10205–10209. [Google Scholar] [CrossRef]
- Desheng, L.; Beibei, Y.; Yu, Z.; Jinping, S. Time-frequency analysis based on BLDC motor fault detection using Hermite S-method. In Proceedings of the 2012 IEEE International Conference on Computer Science and Automation Engineering (CSAE), Zhangjiajie, China, 25–27 May 2012; pp. 592–596. [Google Scholar] [CrossRef]
- Sonje, D.M.; Kundu, P.; Chowdhury, A. Detection and discrimination of simultaneous stator inter-turn and broken rotor bar faults in induction motor. In Proceedings of the 2015 International Conference on Condition Assessment Techniques in Electrical Systems (CATCON), Bangalore, India, 10–12 December 2015; pp. 133–138. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Physical Quality | Value |
|---|---|
| Rated capacity | 15.539 MVA |
| Rated voltage | 6300 V |
| Rated current | 1424 A |
| Rated rpm | 1500 rpm |
| Rated frequency | 50 Hz |
| Rated power factor | 0.8 |
| Poles | 4 |
| Slot number | 48 |
| Effective length | 850 mm |
| Stator outer diameter | 3400 mm |
| Stator inner diameter | 2410 mm |
| Gap length | 24 mm |
| Status | Voltage RMS | Voltage THD | Max Stator Temperature | Max Rotor Temperature | Vibration of Shaft (25 Hz) | Unbalanced Force Direction Period | Average Unbalance Force |
|---|---|---|---|---|---|---|---|
| Normal | A:3.73 kV B:3.73 kV C:3.73 kV | 2.8% | 78.7 °C | 94.7 °C | 0 | 10 ms | 4.8 kN |
| Stator turn to turn short circuit | A:3.68 kV B:3.76 kV C:3.76 kV | 3.3% | 360 °C | 95.0 °C | 0 | 10 ms | 33 kN |
| Rotor turn to turn short circuit | A:3.73 kV B:3.73 kV C:3.73 kV | 2.9% | 78.8 °C | 110.6 °C | 0.06 mm/s | 40 ms | 314 kN |
| Rotor static eccentricity | A:3.74 kV B:3.74 kV C:3.74 kV | 2.8% | 78.7 °C | 94.7 °C | 0.007 mm/s | 40 ms | 455 kN |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Huang, Y.; Yang, K.; Chen, Z.; Luo, C. Generator Fault Classification Method Based on Multi-Source Information Fusion Naive Bayes Classification Algorithm. Energies 2022, 15, 9635. https://doi.org/10.3390/en15249635
Wang Y, Huang Y, Yang K, Chen Z, Luo C. Generator Fault Classification Method Based on Multi-Source Information Fusion Naive Bayes Classification Algorithm. Energies. 2022; 15(24):9635. https://doi.org/10.3390/en15249635
Chicago/Turabian StyleWang, Yi, Yuhao Huang, Kai Yang, Zhihan Chen, and Cheng Luo. 2022. "Generator Fault Classification Method Based on Multi-Source Information Fusion Naive Bayes Classification Algorithm" Energies 15, no. 24: 9635. https://doi.org/10.3390/en15249635
APA StyleWang, Y., Huang, Y., Yang, K., Chen, Z., & Luo, C. (2022). Generator Fault Classification Method Based on Multi-Source Information Fusion Naive Bayes Classification Algorithm. Energies, 15(24), 9635. https://doi.org/10.3390/en15249635