
Active Power Cooperative Control for Wind Power Clusters with Multiple Temporal and Spatial Scales



Abstract
1. Introduction
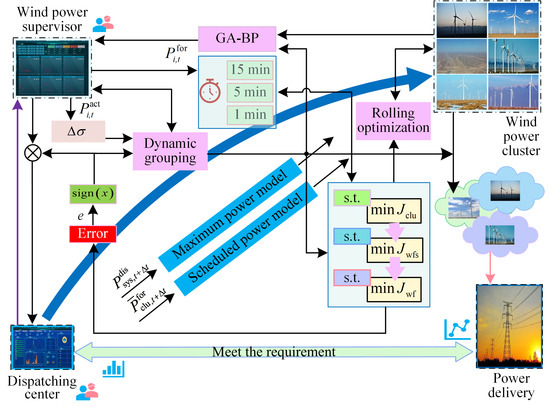
2. Active Power Hierarchical Predictive Control for Wind Power Clusters Based on MPC
3. Active Power Prediction for Wind Power Clusters Based on GA-BP
3.1. GA-BP Neural Network
3.2. Wind Power Dispatch Analysis on Temporal Scale
3.3. Ultra-Short-Term Active Power Prediction Based on GA-BP
4. Hierarchical Predictive Control Multi-Objective Rolling Optimization Model
4.1. Dynamic Clustering of Wind Farms
- (1)
- First uphill then downhill group.
- (2)
- First downhill then uphill group.
4.2. Cluster Layer Control Model
- (1)
- Wind power cluster output climbing limit.where n is the number of wind farms in each sub-cluster, is the climbing rate limit for the layer (15 min) and is the sum of the installed capacity of all wind farms within the wind cluster.
- (2)
- Wind farm output climbing limit.
- (3)
- Limitation of wind farm output.
- (4)
- Wind power cluster dispatch plan tracking constraints.where is the minimum output power of wind farm i in the j cluster, is the installed capacity of wind farm i in the j cluster and is the value of the wind power cluster power dispatch plan.
4.3. Sub-Cluster Coordination Layer Model
- (1)
- The amount of dispatching changes .This situation means that system dispatching requires the wind cluster to generate more power at the next moment. At this time, it is necessary to regulate the output of wind farms with an increasing trend in output power within the wind power cluster, giving priority to the uphill group and the first uphill then downhill group.
- (2)
- The amount of dispatching changes .This situation means that system dispatching requires the wind cluster to generate less power at the next moment. At this time, it is necessary to arrange the wind farm output in the wind power cluster with decreasing active power, giving priority to the downhill group and the first downhill cluster then uphill group.
- (3)
- The amount of dispatching changes .This situation means that system dispatching requires the wind cluster to maintain power stability at the next moment. At this time, it is necessary to regulate the output of wind farms with a smooth trend of output active power within the wind power cluster, giving priority to the smooth group.
- (1)
- Wind power cluster output climbing limit.where is the sub-cluster climbing rate limit.
- (2)
- Wind farm output climbing limit.where is the wind farm climbing rate limit (5 min), and is the installed capacity of wind farm i.
- (3)
- Limitation of wind farm output.
- (4)
- Wind farm cluster scheduling plan tracking constraints.where is the minimum output power of wind farm i, and is the installed capacity of wind farm i. The results obtained from the sub-cluster layer are sent down to the wind farms within the cluster to be used as tracking targets for the next layer.
4.4. Single Wind Farm Power Regulation Model
- (1)
- Wind farm output climbing limit.
- (2)
- Limitation of wind farm output.
- (3)
- Wind farm cluster scheduling plan tracking constraints.where is the dispatch plans issued from the sub-cluster coordination layer, is the predicted value of wind power (1 min) and is the single wind farm output climbing rate limit (1 min).
5. Simulation Study
5.1. GA-BP Neural Network Prediction Results
5.2. Analysis of Dynamic Grouping Results
5.3. Hierarchical Predictive Control Results
5.4. Industrial Field Verification
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| GA | Genetic Algorithm |
| BP | Back Propagation |
| MPC | Model Predictive Control |
| WF1 | Wind Farm 1 |
| WF2 | Wind Fram 2 |
| WF3 | Wind Fram 3 |
| WF4 | Wind Fram 4 |
| WF5 | Wind Fram 5 |
| WF6 | Wind Fram 6 |
References
- Du, G.; Zhao, D.M.; Liu, X. Research review on optimal scheduling considering wind power uncertainty. Proc. CSEE 2022, 10, 1–12. [Google Scholar]
- Feng, Y.; Lin, H.Y.; Ho, S.L. Overview of wind power generation in China: Status and development. Reviews 2015, 50, 847–858. [Google Scholar] [CrossRef]
- Zhang, B.M.; Chen, J.H.; Wu, W.C. A hierarchical model predictive control method of active power for accommodating large-scale wind power integration. Autom. Electr. Power Syst. 2014, 38, 6–14. [Google Scholar]
- Kang, C.Q.; Yao, L.Z. Key scientific issues and theoretical research framework for power systems with high proportion of renewable energy. Autom. Electr. Power Syst. 2017, 41, 2–11. [Google Scholar]
- Wang, Y.Q.; Gui, R.Z. A hybrid model for GRU ultra-short-term wind speed prediction based on tsfresh and sparse PCA. Energies 2017, 15, 7567. [Google Scholar] [CrossRef]
- Xue, Y.S.; Yu, C.; Zhao, J.H.; Li, K.; Wu, Q.W.; Yang, G.Y. A review on short-term and ultra-short-term wind power prediction. Autom. Electr. Power Syst. 2015, 39, 141–151. [Google Scholar]
- Li, Z.; Ye, L.; Zhao, Y.N. Short-term wind power prediction based on extreme learning machine with error correction. Prot. Control. Mod. Power Syst. 2016, 1, 1–8. [Google Scholar] [CrossRef]
- Tascikaraoglu, A.; Uzunoglu, M. A review of combined approaches for prediction of short-term wind speed and power. Prot. Control. Mod. Power Syst. 2014, 34, 243–254. [Google Scholar] [CrossRef]
- Ye, L.; Ren, C.; Zhao, Y.N.; Rao, R.S.; Teng, J.Z. Stratification analysis approach of numerical characteristics for ultra-short-term wind power forecasting error. Proc. CSEE 2016, 36, 692–700. [Google Scholar]
- Wang, W.S.; Wang, Z.; Dong, C.; Liang, Z.F.; Feng, S.L.; Wang, B. Status and error analysis of short-term forecasting technology wind power in China. Autom. Electr. Power Syst. 2021, 45, 17–27. [Google Scholar]
- Shahram, H.; Liu, X.L.; Lin, Z.; Saeid, L. A critical review of wind power forecasting methods—past, present and future. Energies 2020, 13, 3764. [Google Scholar]
- Yang, X.Y.; Zhang, Y.F.; Ye, T.Z.; Su, J. Prediction of combination probability interval of wind power based on naive bayes. Energies 2020, 46, 1099–1108. [Google Scholar]
- Li, Z.; Ye, L.; Dai, B.H.; Yu, Y.J.; Luo, Y.D.; Song, X.R. Ultra-short-term wind power prediction method based on IDSCNN-AM-LSTM combination neural network. High Volt. Eng. 2021, 46, 1–13. [Google Scholar]
- Cheng, K.; Peng, X.S.; Xu, Q.Y.; Wang, B.; Liu, C.; Che, J.F. Short-term wind power prediction based on feature selection and multi-level deep transfer learning. High Volt. Eng. 2022, 48, 497–503. [Google Scholar]
- Wang, B.; Liu, C.; Feng, S.L.; Qiu, G.; Meng, X.X.; Zhao, J.Y. Prediction method for short-term wind power based on wind farm clusters. High Volt. Eng. 2018, 44, 1254–1260. [Google Scholar]
- Yang, Z.M.; Peng, X.S.; Lang, J.X.; Wang, H.Y.; Wang, B.; Liu, C. Short-term wind power prediction based on dynamic cluster division and BLSTM deep Learning method. High Volt. Eng. 2021, 47, 1195–1203. [Google Scholar]
- Lu, P.; Ye, L.; Tang, Y.; Zhang, C.H.; Zhong, W.Z.; Sun, B.H.; Zhai, B.X.; Qu, Y.; Liu, X.Y. Multi-time scale active power optimal dispatch in wind power cluster based on model predictive control. Proc. CSEE 2019, 39, 6572–6582. [Google Scholar]
- Huang, Q.H.; Wang, X. A forecasting model of wind power based on IPSO–LSTM and classified fusion. Energies 2022, 15, 5531. [Google Scholar] [CrossRef]
- Ye, L.; Lu, P.; Zhao, Y.N.; Dai, B.H.; Tang, Y. Review of model predictive control for power system with large-scale wind power grid-connected. Proc. CSEE 2021, 41, 6181–6198. [Google Scholar]
- Tang, Y.; Wang, Q.; Chen, N.; Zhu, L.Z. A dispatching method of active power in wind farm clusters considering probability distribution of forecasting errors. Proc. CSEE 2013, 33, 27–32. [Google Scholar]
- Ye, L.; Zhang, C.H.; Tang, Y.; Sun, B.H.; Zhong, W.Z.; Lan, H.B.; Liu, H.; Li, P.; Huang, Y.H. Active power stratification predictive control approach for wind power cluster with multiple temporal and spatial scales coordination. Proc. CSEE 2018, 13, 3767–3780. [Google Scholar]
- Liu, Q.; Fang, J.J.; Zhao, J.; Zhang, S.F.; Liu, D.C.; Chen, Y. Wind power dispatching control strategy based on DSA power prediction model. Electr. Power Constr. 2019, 40, 63–70. [Google Scholar]
- Zheng, H.P.; Zeng, P.; Liu, X.Y.; Cheng, X.T.; Bo, L.M.; Yang, W.W.; Zhang, Y.F.; Cui, Y. Active power layered control strategy based on error feedforward prediction for multiple temporal and spatial scales wind power cluster. Electr. Power Constr. 2020, 41, 120–128. [Google Scholar]
- Zhao, H.R.; Wu, Q.W.; Guo, Q.L. Distributed model predictive control of a wind farm for optimal active power control Part I: Clustering-based wind turbine model linearization. IEEE Trans. Sustain. Energy 2015, 6, 831–839. [Google Scholar] [CrossRef]
- Ye, L.; Zhang, C.H.; Tang, Y. Hierarchical model predictive control strategy based on dynamic active power dispatch for wind power cluster integration. IEEE Trans. Power Syst. 2019, 6, 4617–4629. [Google Scholar] [CrossRef]
- Xu, Y.Y.; Liu, P.F.; Irene, P.; He, G.H.; Alireza, H.; Hassan, G. Energy generation efficiency and strength coupled design and optimization of wind turbine rotor blades. J. Energy Eng. 2019, 145, 04019004. [Google Scholar] [CrossRef]
- Zhao, H.R.; Wu, Q.W.; Wang, J.H. Combined active and reactive power control of wind farms based on model predictive control. IEEE Trans. Energy 2017, 32, 1177–1187. [Google Scholar] [CrossRef]
- Sultana, W.R.; Sahoo, S.K.; Sukchai, S. A review on state of art development of model predictive control for renewable energy applications. Renew. Sustain. Energy Rev. 2017, 76, 391–406. [Google Scholar] [CrossRef]
- Zhang, J.H.; Liu, Y.Q.; David, I. Optimal power dispatch within wind farm based on two approaches to wind turbine classification. Renew. Energy 2017, 102, 487–501. [Google Scholar]
- Cui, Y.; Zeng, P.; Wang, Z.; Wang, M.C.; Zhang, J.T.; Zhao, Y.T. Multiple time scales scheduling strategy of wind power accommodation considering energy transfer characteristics of carbon capture power plant. Proc. CSEE 2021, 41, 946–961. [Google Scholar]
- Zhang, X.S.; Yu, T.; Yang, B. A Random forest-assisted fast distributed auction-based algorithm for hierarchical coordinated power control in a large-scale PV power plant. IEEE Trans. Sustain. Energy 2021, 12, 2471–2481. [Google Scholar] [CrossRef]
- Liu, X.J.; Feng, L.; Kong, X.B. A comparative study of robust MPC and stochastic MPC of wind power generation system. Energies 2022, 15, 4814. [Google Scholar] [CrossRef]
- Ebrahimi, F.M.; Khayatiyan, A.; Farjah, E. A novel optimizing power control strategy for centralized wind farm control system. Renew. Energy 2016, 86, 399–408. [Google Scholar] [CrossRef]
- Khatamianfar, A.; Khalid, M.; Savkin, A.V. Improving wind farm dispatch in the Australian electricity market with battery energy storage using model predictive control. IEEE Trans. Sustain. Energy 2013, 4, 745–755. [Google Scholar] [CrossRef]
- Han, P.; Zhang, X.L.; Zhang, F.; Wang, Y.P. Ultra-short-term wind power prediction based on AM-LSTM model. IEEE Trans. Sustain. Energy 2020, 20, 8594–8600. [Google Scholar]
- Yu, H.; Lu, J.P.; Zeng, Y.T.; Duan, P.; Liu, J.L.; Gou, X. Nonlinear combined model for wind power forecasting based on different optimization criteria and generalized regression neural network. High Volt. Eng. 2019, 45, 1002–1008. [Google Scholar]
- Lu, P.; Ye, L.; Pei, M.; He, B.Y.; Tang, Y.; Zhai, B.X.; Qu, y.; Li, Z. Coordinated control strategy for active power of wind power cluster based on model predictive control. Proc. CSEE 2021, 41, 5887–5900. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Criteria | Group Type |
|---|---|---|
| 0 | or | Smooth group |
| 1 | Uphill group | |
| 2 | Downhill group | |
| 3 | First uphill then downhill group | |
| 4 | First downhill then uphill group | |
| 5 | Transitional fluctuation group |
| Group Type | Characterization |
|---|---|
| Smooth group | No change in output power trend |
| Uphill group | The output power shows an upward trend and is able to complete the increased power command |
| Downhill group | The output power shows a downward trend and is able to complete the power reduction command |
| Oscillating group | The output power shows a trend of rising then falling, falling then rising |
| Transitional fluctuation group | The output power fluctuates up and down, easily causing control errors |
| Wind Farm Number | Installed Capacity (MW) |
|---|---|
| WF1 | 201 |
| WF2 | 50 |
| WF3 | 94 |
| WF4 | 99 |
| WF5 | 96 |
| WF6 | 98.8 |
| Time | WF1 | WF2 | WF3 | WF4 | WF5 | WF6 |
|---|---|---|---|---|---|---|
| 00:00–00:45 | 2 | 3 | 4 | 2 | 2 | 2 |
| 00:45–01:30 | 2 | 2 | 2 | 3 | 3 | 2 |
| 01:30–02:15 | 2 | 1 | 2 | 1 | 4 | 4 |
| 02:15–03:00 | 2 | 1 | 2 | 1 | 0 | 4 |
| 03:00–03:45 | 2 | 0 | 3 | 3 | 0 | 1 |
| 03:45–04:30 | 4 | 3 | 3 | 2 | 0 | 1 |
| 04:30–05:15 | 1 | 0 | 4 | 3 | 0 | 1 |
| 05:15–06:00 | 4 | 2 | 1 | 4 | 0 | 2 |
| 06:00–06:45 | 1 | 0 | 4 | 1 | 4 | 3 |
| 06:45–07:30 | 4 | 1 | 3 | 1 | 1 | 4 |
| 07:30–08:15 | 1 | 2 | 2 | 1 | 3 | 1 |
| 08:15–09:00 | 2 | 1 | 1 | 3 | 4 | 2 |
| 09:00–09:45 | 4 | 1 | 2 | 2 | 1 | 2 |
| 09:45–10:30 | 2 | 1 | 1 | 2 | 1 | 5 |
| 10:30–11:15 | 4 | 2 | 1 | 1 | 4 | 2 |
| 11:15–12:00 | 2 | 2 | 2 | 3 | 2 | 1 |
| 12:00–12:45 | 4 | 5 | 3 | 2 | 4 | 4 |
| 12:45–13:30 | 1 | 5 | 4 | 1 | 4 | 1 |
| 13:30–14:15 | 1 | 2 | 3 | 3 | 3 | 1 |
| 14:15–15:00 | 4 | 4 | 4 | 2 | 3 | 4 |
| 15:00–15:45 | 2 | 4 | 4 | 4 | 4 | 1 |
| 15:45–16:30 | 2 | 1 | 3 | 4 | 3 | 1 |
| 16:30–17:15 | 4 | 1 | 3 | 2 | 4 | 5 |
| 17:15–18:00 | 1 | 1 | 1 | 1 | 4 | 1 |
| 18:00–18:45 | 1 | 1 | 1 | 1 | 1 | 2 |
| 18:45–19:30 | 1 | 1 | 4 | 1 | 3 | 2 |
| 19:30–20:15 | 1 | 3 | 3 | 1 | 1 | 2 |
| 20:15–21:00 | 1 | 4 | 1 | 2 | 2 | 2 |
| 21:00–21:45 | 1 | 2 | 1 | 3 | 4 | 2 |
| 21:45–22:30 | 1 | 2 | 2 | 3 | 2 | 2 |
| 22:30–23:15 | 1 | 1 | 1 | 1 | 2 | 2 |
| 23:15–24:00 | 1 | 3 | 2 | 1 | 4 | 2 |
| Mode | The Trend of Wind Power | Dispatch Directions | Dynamic Grouping of Output Power Priorities |
|---|---|---|---|
| Synchronous scheduling | Rise | Increase | 1 > 3 > 0 > 2 > 4 |
| Decline | Decrease | 2 > 4 > 0 > 3 > 1 | |
| Asynchronous scheduling | Rise | Increase | 2 > 4 > 3 > 1 > 0 |
| Decline | Decrease | 1 > 3 > 0 > 4 > 2 |
| Area Number | Fixed Proportion Strategy (%) | Active Hierarchical Predictive Control (%) |
|---|---|---|
| A | 7.43 | 5.23 |
| B | 6.54 | 5.08 |
| C | 8.49 | 6.03 |
| D | 5.80 | 3.37 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, M.; Wang, W.; Qiu, J.; Li, D.; Lei, L. Active Power Cooperative Control for Wind Power Clusters with Multiple Temporal and Spatial Scales. Energies 2022, 15, 9453. https://doi.org/10.3390/en15249453
Tang M, Wang W, Qiu J, Li D, Lei L. Active Power Cooperative Control for Wind Power Clusters with Multiple Temporal and Spatial Scales. Energies. 2022; 15(24):9453. https://doi.org/10.3390/en15249453
Chicago/Turabian StyleTang, Minan, Wenjuan Wang, Jiandong Qiu, Detao Li, and Linyuan Lei. 2022. "Active Power Cooperative Control for Wind Power Clusters with Multiple Temporal and Spatial Scales" Energies 15, no. 24: 9453. https://doi.org/10.3390/en15249453
APA StyleTang, M., Wang, W., Qiu, J., Li, D., & Lei, L. (2022). Active Power Cooperative Control for Wind Power Clusters with Multiple Temporal and Spatial Scales. Energies, 15(24), 9453. https://doi.org/10.3390/en15249453