
A Study on Reduction of Cogging Torque and Magnet Usage through Intersect Magnet Consequent Pole Structure


Abstract
:1. Introduction
2. Consequent Pole Applied to Reduce Magnet Usage
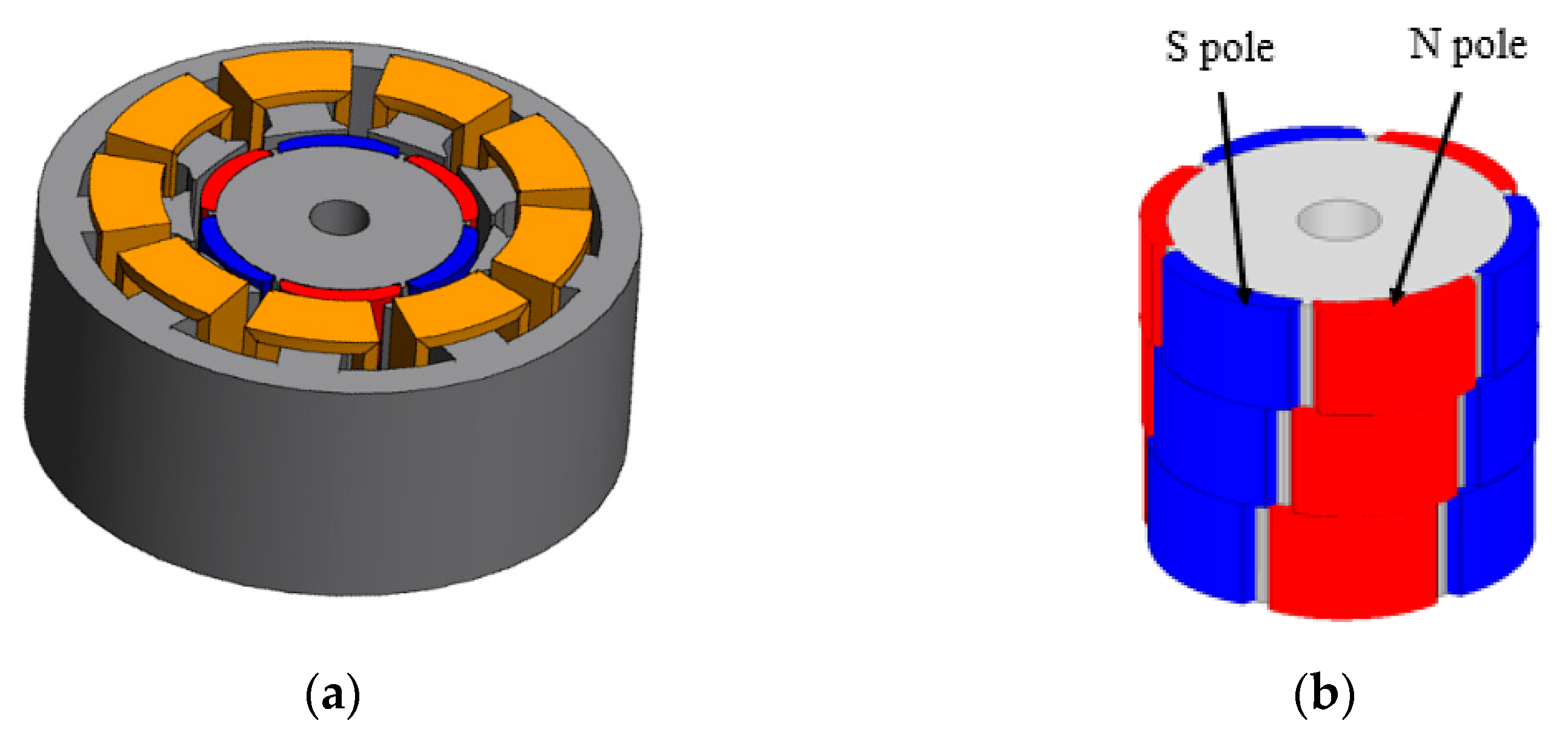
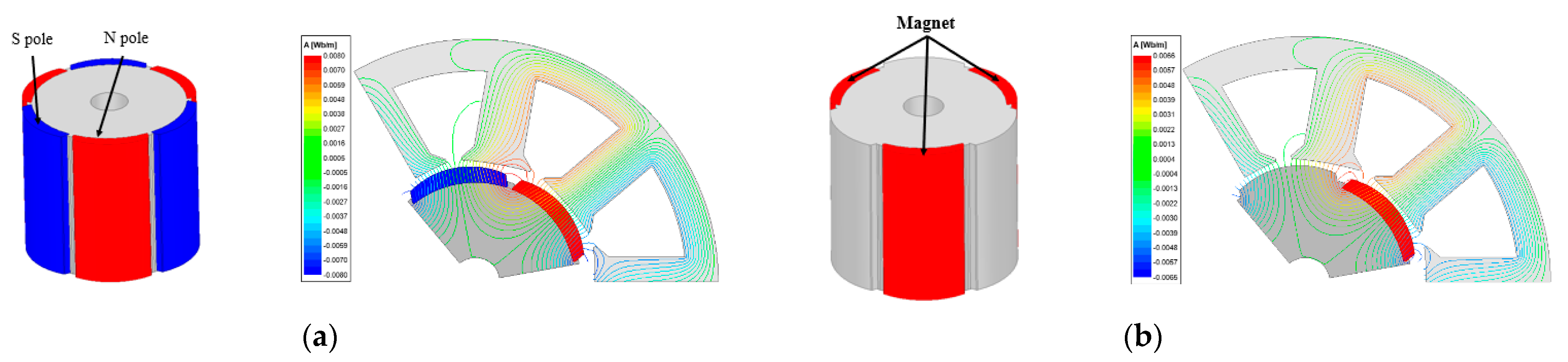
2.1. Existing Model Analysis
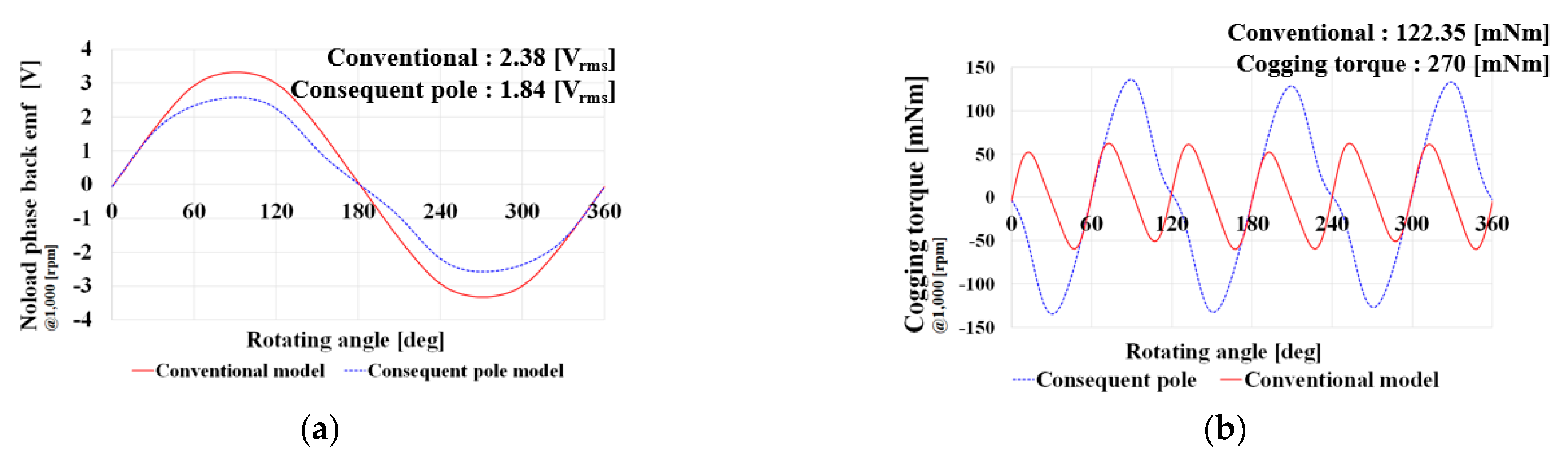
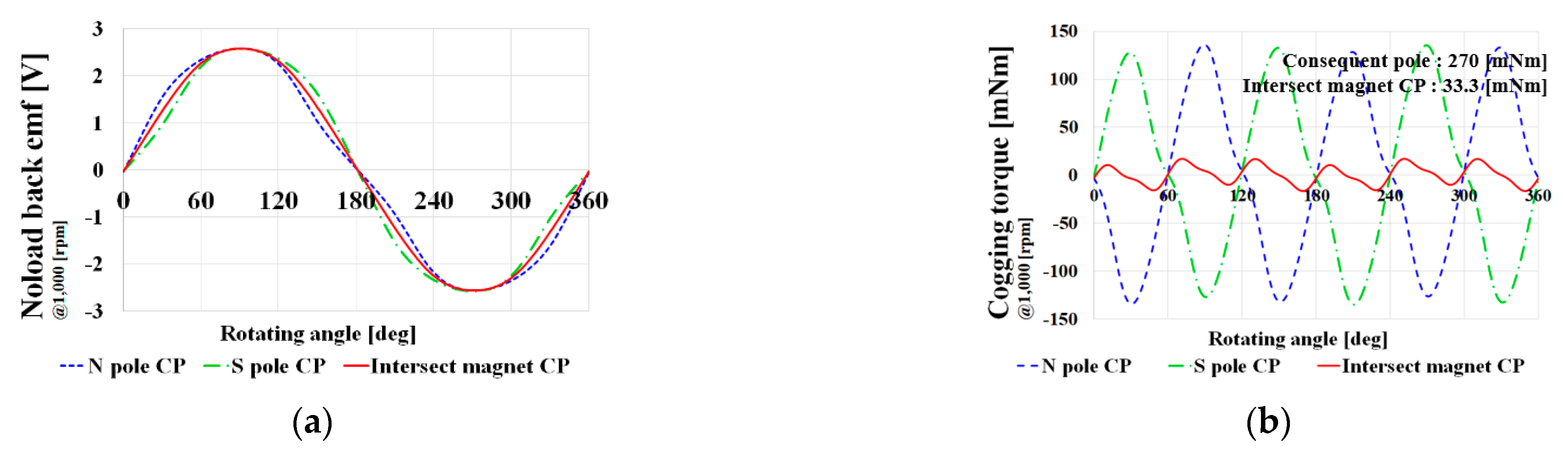
2.2. Consequent Pole
3. Application of Intersect Magnet Consequent Pole for Performance Improvement
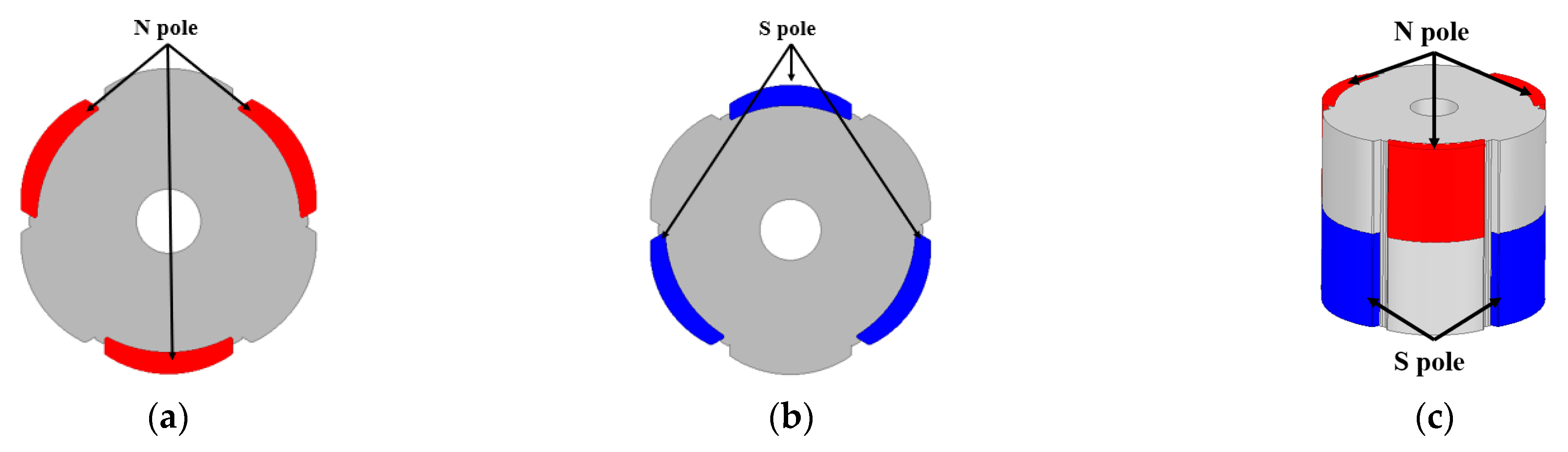
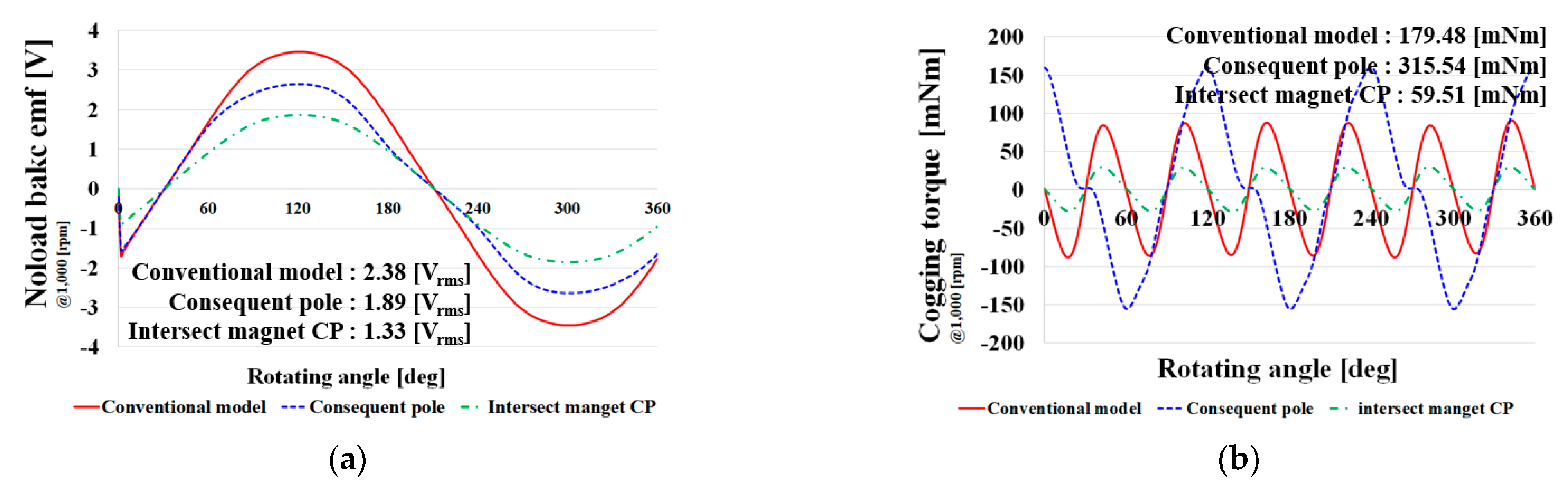
3.1. Intersect Magnet Consequent Pole
3.2. Intersect Magnet Consequent Pole Applied with Rotor Gap
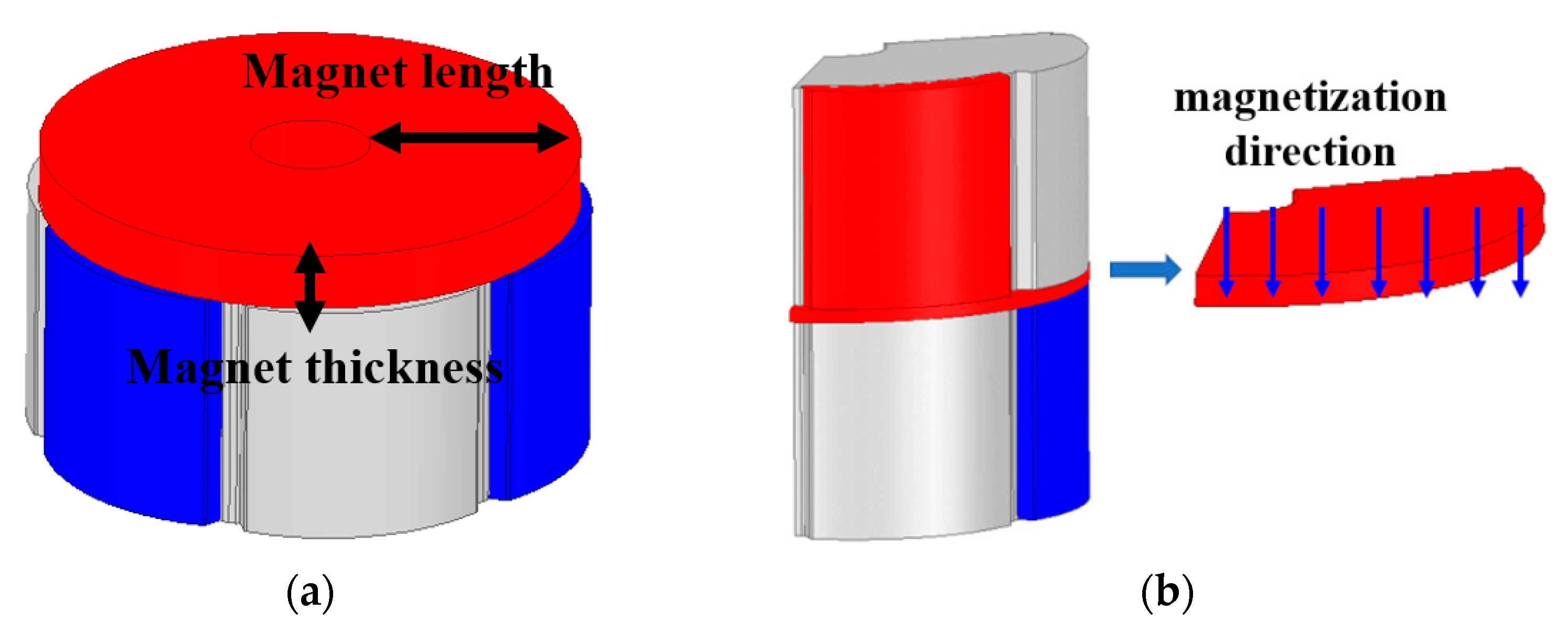
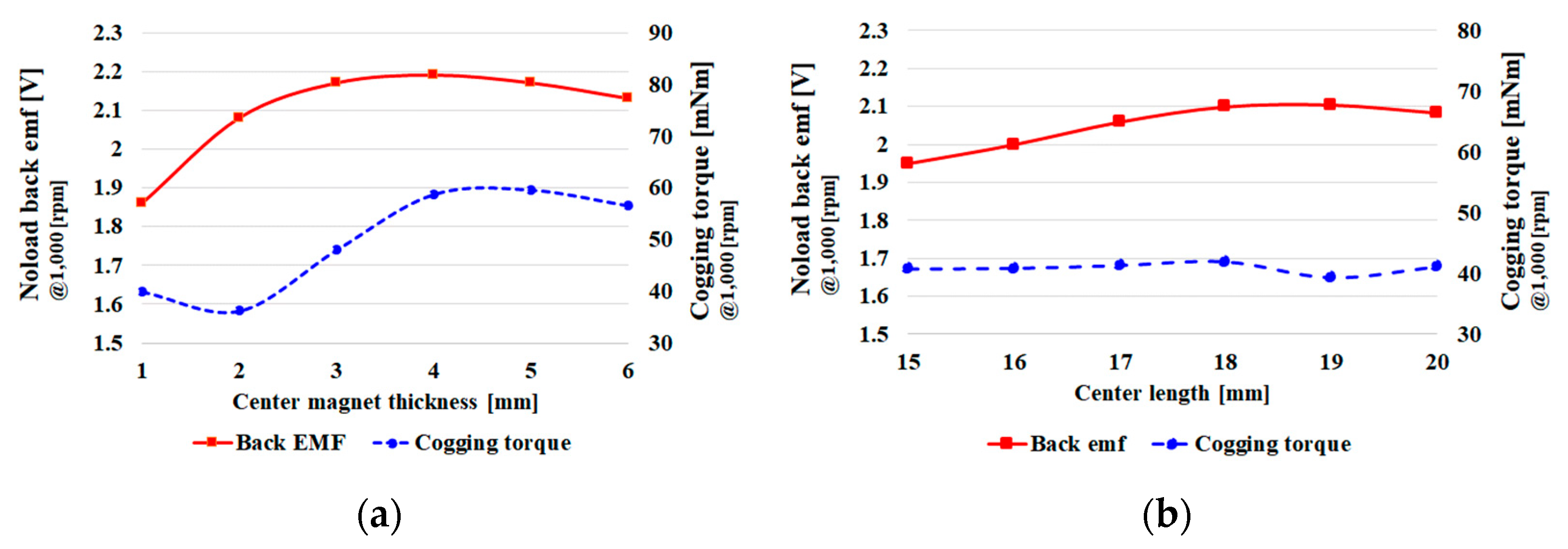
3.3. Center Magnet Applied to Intersect Magnet Consequent Pole
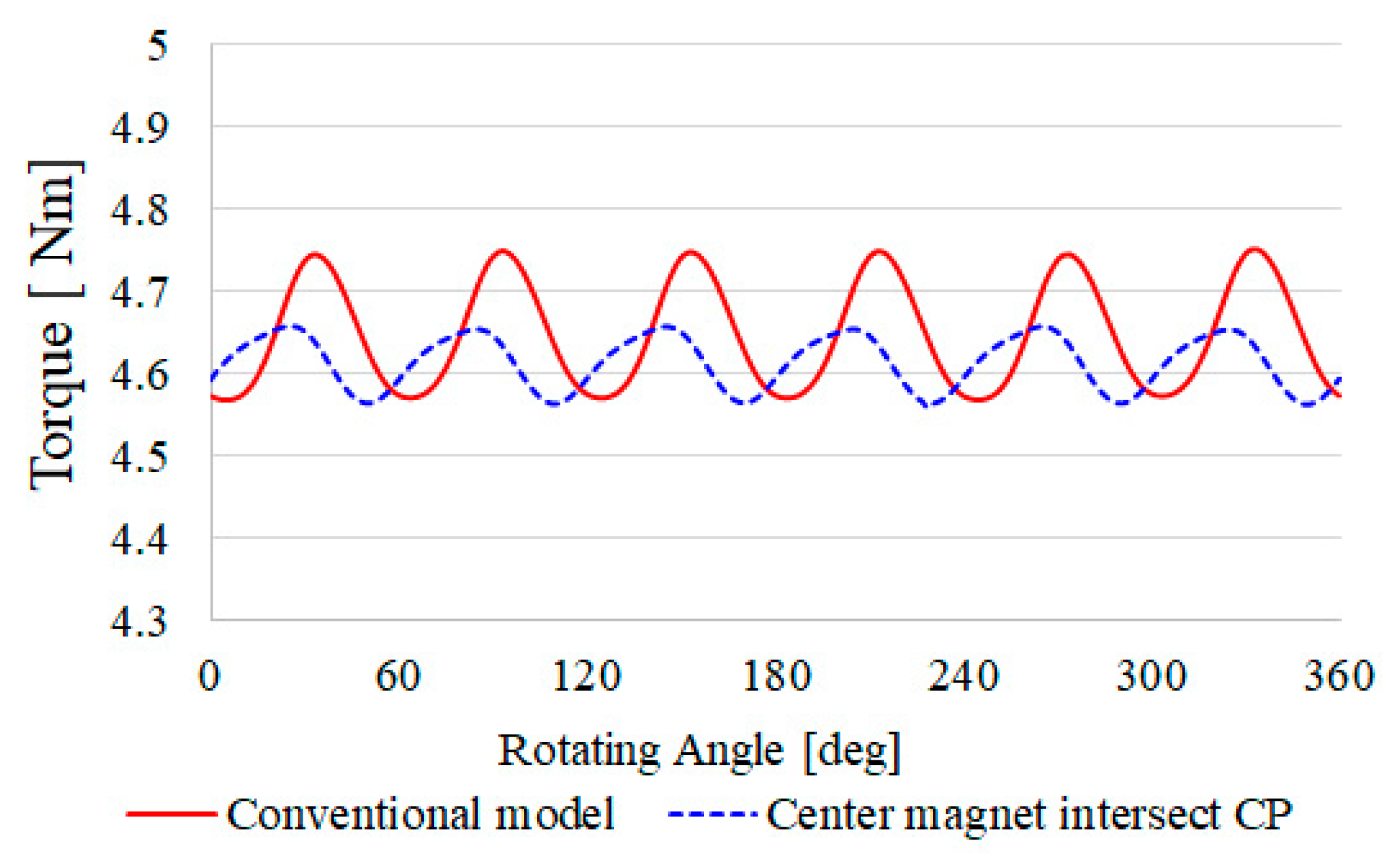
3.4. Center Magnet Intersect Consequent Pole
3.5. Mechanical Stiffness Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Du, G.; Hu, C.; Zhou, Q.; Gao, W.; Zhang, Q. Multi-Objective Optimization for Outer Rotor Low-Speed Permanent Magnet Motor. Appl. Sci. 2022, 12, 8113. [Google Scholar] [CrossRef]
- Sirimanna, S.; Balachandran, T.; Haran, K. A Review on Magnet Loss Analysis, Validation, Design Considerations, and Reduction Strategies in Permanent Magnet Synchronous Motors. Energies 2022, 15, 6116. [Google Scholar] [CrossRef]
- Shou, J.; Ma, J.; Zhang, Z.; Qiu, L.; Xu, B.; Luo, C.; Li, B.; Fang, Y. Vibration and Noise Optimization of Variable-Frequency-Driven SPMSM Used in Compressor Based on Electromagnetic Analysis and Modal Characteristics. Energies 2022, 15, 7474. [Google Scholar] [CrossRef]
- Song, S.W.; Jeong, M.J.; Kim, K.S.; Lee, J.; Kim, W.H. A study on reducing eddy current loss of sleeve and improving torque density using ferrofluid of a surface permanent magnet synchronous motor. IET Electr. Power Appl. 2022, 16, 463–471. [Google Scholar] [CrossRef]
- Hayashi, S.; Kubota, Y.; Soma, S.; Ohtani, M.; Igarashi, H. Topology Optimization of Permanent Magnet Synchronous Motor Considering the Control System. IEEE Trans. Magn. 2022, 58, 8205605. [Google Scholar] [CrossRef]
- Liu, C.; Xu, Y.; Zou, J.; Yu, G.; Zhuo, L. Permanent magnet shape optimization method for PMSM air gap flux density harmonics reduction. CES Trans. Electr. Mach. Syst. 2021, 5, 284–290. [Google Scholar] [CrossRef]
- Feng, D.Y.; Liu, Z.W.; Zheng, Z.G.; Zhong, X.C.; Zhang, G.Q. Hard Magnetic Properties and Thermal Stability for TbCu7-Type SmCo6.4Si0.3Zr0.3 Alloys with Sm Substituted by Various Rare-Earth Elements. IEEE Trans. Magn. 2015, 51, 2100604. [Google Scholar] [CrossRef]
- Taskaev, S.V.; Skokov, K.P.; Khovaylo, V.V.; Gorshenkov, M.V.; Vasiliev, A.N.; Volkova, O.S.; Bataev, D.S.; Pellenen, A.P.; Gutfleisch, O. Magnetic Properties of Nd and Sm Rare-Earth Metals After Severe Plastic Deformation. IEEE Magn. Lett. 2016, 7, 5203104. [Google Scholar] [CrossRef]
- Saito, F.; Miura, D.; Sakuma, A. Theoretical Study of Gilbert Damping in Rare-Earth Permanent Magnets. IEEE Trans. Magn. 2019, 55, 2101604. [Google Scholar] [CrossRef]
- Kwon, J.-W.; Kwon, B.-I. Torque Enhancement Principle of Stator PM Vernier Machine by Consequent Pole Structure. Energies 2022, 15, 2993. [Google Scholar] [CrossRef]
- Song, S.-W.; Yang, I.-J.; Lee, S.-H.; Kim, D.-H.; Kim, K.S.; Kim, W.-H. A Study on New High-Speed Motor That Has Stator Decreased in Weight and Coreloss. IEEE Trans. Magn. 2021, 57, 8201105. [Google Scholar] [CrossRef]
- Ueda, Y.; Takahashi, H.; Akiba, T.; Yoshida, M. Fundamental Design of a Consequent-Pole Transverse-Flux Motor for Direct-Drive Systems. IEEE Trans. Magn. 2013, 49, 4096–4099. [Google Scholar] [CrossRef]
- Hattori, A.; Noguchi, T.; Murakami, K. Mathematical Model Derivation and Experimental Verification of Novel Consequent-Pole Adjustable Speed PM Motor. Energies 2022, 15, 6147. [Google Scholar] [CrossRef]
- Li, F.; Wang, K.; Li, J.; Sun, H.Y. Electromagnetic Performance Analysis of Consequent-Pole PM Machine with Asymmetric Magnetic Pole. IEEE Trans. Magn. 2019, 55, 8103205. [Google Scholar] [CrossRef]
- Li, F.; Wang, K.; Li, J.; Zhang, H.J. Suppression of Even-Order Harmonics and Torque Ripple in Outer Rotor Consequent-Pole PM Machine by Multilayer Winding. IEEE Trans. Magn. 2018, 54, 8108605. [Google Scholar] [CrossRef]
- Hemeida, A.; Sergeant, P. Analytical Modeling of Surface PMSM Using a Combined Solution of Maxwell–s Equations and Magnetic Equivalent Circuit. IEEE Trans. Magn. 2014, 50, 7027913. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Pole/Slot | 6/9 | - |
| Stator diameter | 84 | mm |
| Rotor diameter | 41.4 | mm |
| Air gap | 0.7 | mm |
| Stack length | 34.5 | mm |
| Skew multi-stage/angle | 3/7.5 | step/DegM |
| Current density | 17.3 | A/mm2 |
| Torque | 5 | Nm |
| Cogging torque | 90 | mNm |
| Rated speed | 1000 | rpm |
| Magnet material | N48H | |
| Core material | 50pn470 | |
| Conventional Model (Skew Model) | Final Model | Unit | |
|---|---|---|---|
| Noload back EMF | 2.2 | 2.18 | Vrms |
| Cogging torque | 90 | 49.1 | mNm |
| Torque ripple | 182.94 | 99.52 | mNm |
| Magnet volume | 9211.5 | 6529 | mm3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, S.-W.; Hong, M.-K.; Lee, J.; Kim, W.-H. A Study on Reduction of Cogging Torque and Magnet Usage through Intersect Magnet Consequent Pole Structure. Energies 2022, 15, 9255. https://doi.org/10.3390/en15239255
Song S-W, Hong M-K, Lee J, Kim W-H. A Study on Reduction of Cogging Torque and Magnet Usage through Intersect Magnet Consequent Pole Structure. Energies. 2022; 15(23):9255. https://doi.org/10.3390/en15239255
Chicago/Turabian StyleSong, Si-Woo, Min-Ki Hong, Ju Lee, and Won-Ho Kim. 2022. "A Study on Reduction of Cogging Torque and Magnet Usage through Intersect Magnet Consequent Pole Structure" Energies 15, no. 23: 9255. https://doi.org/10.3390/en15239255
APA StyleSong, S.-W., Hong, M.-K., Lee, J., & Kim, W.-H. (2022). A Study on Reduction of Cogging Torque and Magnet Usage through Intersect Magnet Consequent Pole Structure. Energies, 15(23), 9255. https://doi.org/10.3390/en15239255