
Output-Feedback Multi-Loop Positioning Technique via Dual Motor Synchronization Approach for Elevator System Applications

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- The design of the speed observer makes it possible to derive the output-feedback multi-loop solution invoking the order reduction by the specially designed gain structure, independent from any model and load information;
- The observer-based order-reduction speed stabilization technique results in both the pivotal inner loop for the positioning system (master motor) and the speed synchronizer (slave motor) through the specially designed gain structure and the combination of the integrator and DOB;
- The proof of the exponential convergence property recovering the desired first-order positioning performance by specifying the admissible ranges of design factors.
2. System Model
3. Proposed Solution
3.1. Mission
3.2. Speed Observer
3.3. Master Motor Output-Feedback System (for Positioning)
3.3.1. Outer Loop
3.3.2. Inner Loop
3.4. Slave Motor Output-Feedback System (for Speed Synchronization)
4. Analysis
4.1. Auxiliary Systems for Master and Slave Motors
4.1.1. Observer
4.1.2. DOB
4.2. Multi-Loop Positioning System for Master Motor
4.2.1. Inner Loop
4.2.2. Entire Loop
4.3. Speed Synchronization System for Slave Motor
5. Experimental Results
5.1. Configuration
5.2. Case 1: Stair Reference Tracking
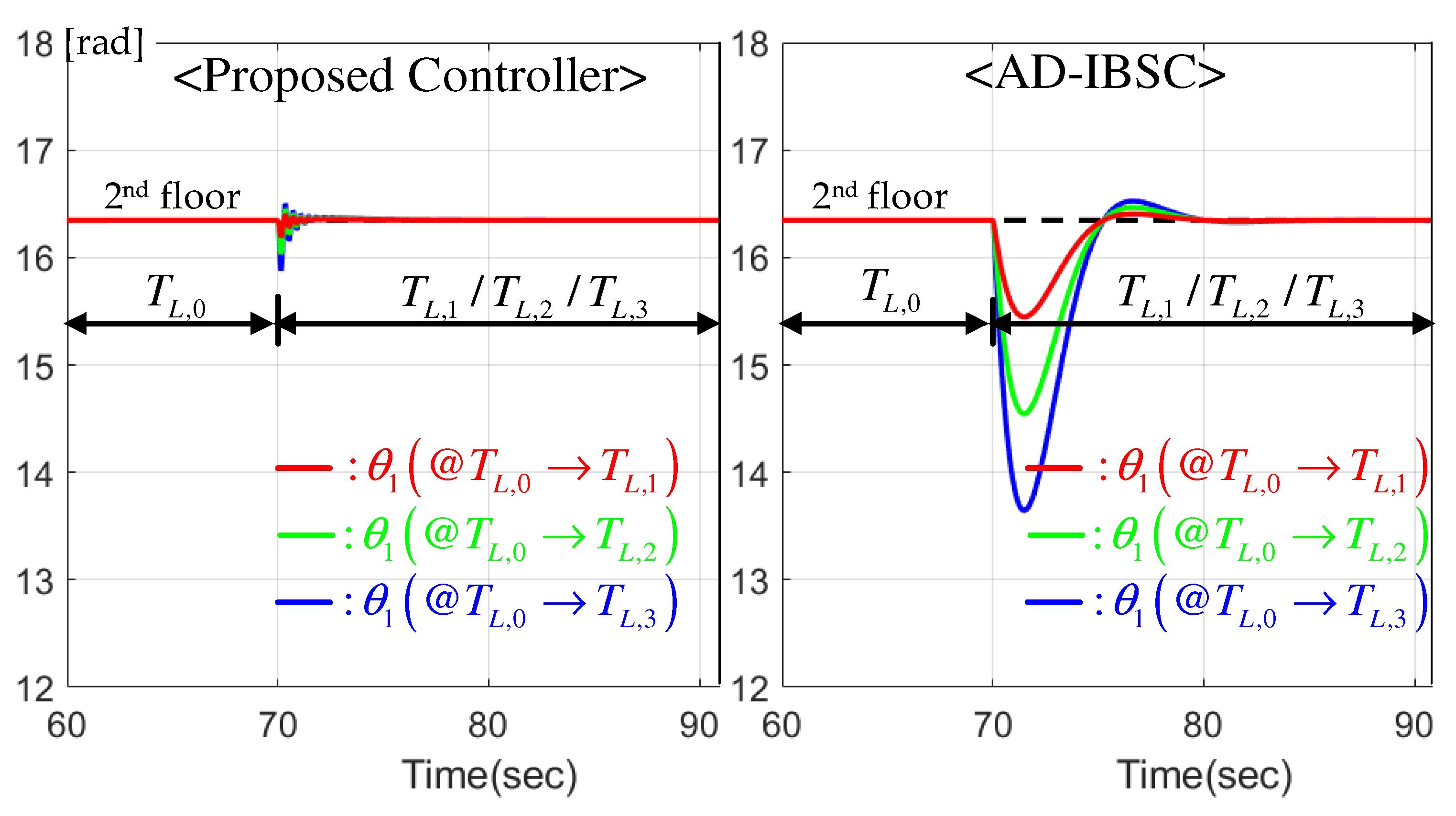
5.3. Case 2: Constant Reference Regulation
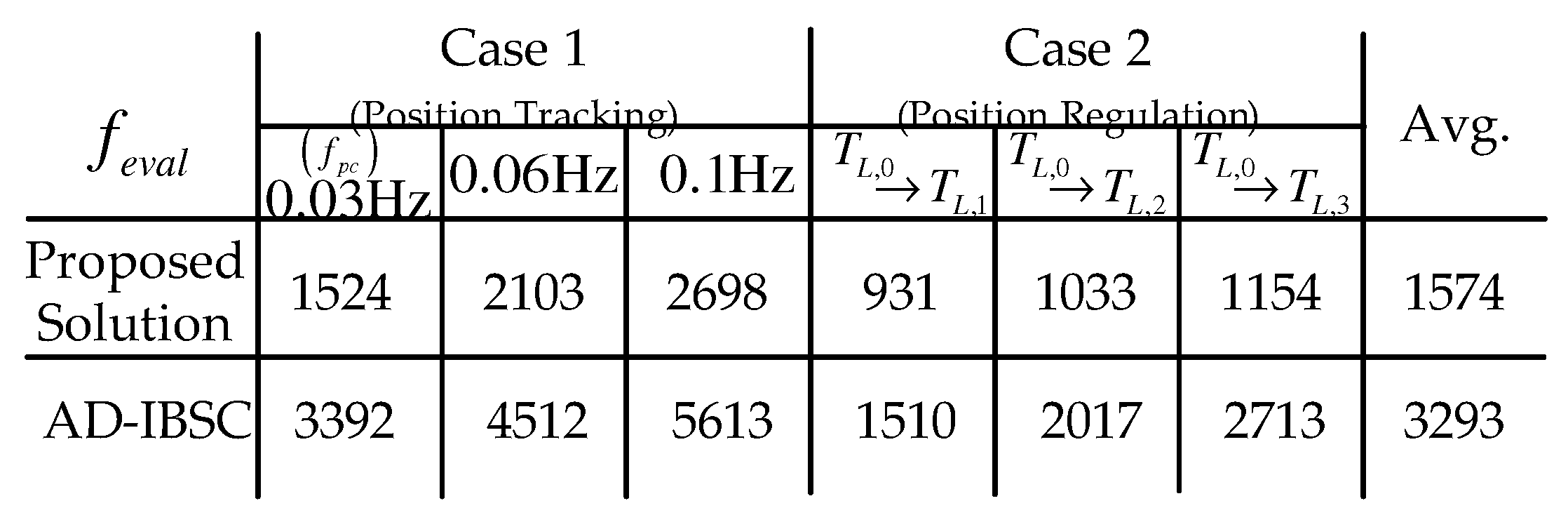
5.4. Numerical Comparison
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Chen, K.Y.; Huang, M.S.; Fung, R.F. Dynamic modelling and input-energy comparison for the elevator system. Appl. Math. Modell. 2014, 38, 2037–2050. [Google Scholar] [CrossRef]
- Wang, G.; Qi, J.; Xu, J.; Zhang, X.; Xu, D. Antirollback Control for Gearless Elevator Traction Machines Adopting Offset-Free Model Predictive Control Strategy. IEEE Trans. Ind. Electron. 2015, 62, 6194–6203. [Google Scholar] [CrossRef]
- Yoo, M.S.; Park, S.W.; Lee, H.J.; Yoon, Y.D. Offline Compensation Method for Current Scaling Gains in AC Motor Drive Systems with Three-Phase Current Sensors. IEEE Trans. Ind. Electron. 2021, 68, 4760–4768. [Google Scholar] [CrossRef]
- Benosman, M. Lyapunov-Based Control of the Sway Dynamics for Elevator Ropes. IEEE Trans. Control Syst. Technol. 2014, 22, 1855–1863. [Google Scholar] [CrossRef]
- Pisharam, S.M.; Agarwal, V. Novel High-Efficiency High Voltage Gain Topologies for AC–DC Conversion with Power Factor Correction for Elevator Systems. IEEE Trans. Ind. Appl. 2018, 54, 6234–6246. [Google Scholar] [CrossRef]
- Benevieri, A.; Carbone, L.; Cosso, S.; Kumar, K.; Marchesoni, M.; Passalacqua, M.; Vaccaro, L. Surface Permanent Magnet Synchronous Motors’ Passive Sensorless Control: A Review. Energies 2022, 15, 7747. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Z.; Liu, T. Anti-Disturbance Integrated Position Synchronous Control of a Dual Permanent Magnet Synchronous Motor System. Energies 2022, 15, 6697. [Google Scholar] [CrossRef]
- Chen, C.S.; Hu, N.T. Model Reference Adaptive Control and Fuzzy Neural Network Synchronous Motion Compensator for Gantry Robots. Energies 2022, 15, 123. [Google Scholar] [CrossRef]
- Lim, S.; Kim, S.K.; Kim, K.C. Model-Independent Observer-Based Current Sensorless Speed Servo Systems with Adaptive Feedback Gain. Actuators 2022, 11, 126. [Google Scholar] [CrossRef]
- Sul, S.K. Control of Electric Machine Drive Systems; Wiley-IEEE Press: Hoboken, NJ, USA, 2011. [Google Scholar]
- Olalla, C.; Leyva, R.; Queinnec, I.; Maksimovic, D. Robust Gain-Scheduled Control of Switched-Mode DC-DC Converters. IEEE Trans. Power Electron. 2012, 27, 3006–3019. [Google Scholar] [CrossRef]
- Su, J.T.; Liu, C.W. Gain scheduling control scheme for improved transient response of DC-DC converters. IET Power Electron. 2012, 5, 678–692. [Google Scholar] [CrossRef]
- Liu, X.; Guo, H.; Cheng, X.; Du, J.; Ma, J. A Robust Design of the Model-Free-Adaptive-Control-Based Energy Management for Plug-in Hybrid Electric Vehicle. Energies 2022, 15, 7467. [Google Scholar] [CrossRef]
- Zuo, S.; Zhang, Y.; Wang, Y. Adaptive Resilient Control of AC Microgrids under Unbounded Actuator Attacks. Energies 2022, 15, 7458. [Google Scholar] [CrossRef]
- Qu, W.; Chen, G.; Zhang, T. An Adaptive Noise Reduction Approach for Remaining Useful Life Prediction of Lithium-Ion Batteries. Energies 2022, 15, 7422. [Google Scholar] [CrossRef]
- Kim, S.K.; Lee, J.S.; Lee, K.B. Self-Tuning Adaptive Speed Controller for Permanent Magnet Synchronous Motor. IEEE Trans. Power Electron. 2017, 32, 1493–1506. [Google Scholar] [CrossRef]
- Kim, S.K. Robust adaptive speed regulator with self-tuning law for surfaced-mounted permanent magnet synchronous motor. Control Eng. Pract. 2017, 61, 55–71. [Google Scholar] [CrossRef]
- El-Sousy, F.F.M.; Abuhasel, K.A. Nonlinear Robust Optimal Control via Adaptive Dynamic Programming of Permanent-Magnet Linear Synchronous Motor Drive for Uncertain Two-Axis Motion Control System. IEEE Trans. Ind. Appl. 2020, 56, 1940–1952. [Google Scholar] [CrossRef]
- Kim, S.K.; Kim, Y.; Ahn, C.K. Energy-Shaping Speed Controller with Time-Varying Damping Injection for Permanent-Magnet Synchronous Motors. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 381–385. [Google Scholar] [CrossRef]
- Kim, S.K.; Ahn, C.K. Position Regulator with Variable Cut-Off Frequency Mechanism for Hybrid-Type Stepper Motors. IEEE Trans. Circuits Syst. I Regul. Pap. 2020, 67, 3533–3540. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, Z.; Wang, J.; Wang, S.; Chen, X.; Sun, H. ADRC Control System of PMLSM Based on Novel Non-Singular Terminal Sliding Mode Observer. Energies 2022, 15, 3720. [Google Scholar] [CrossRef]
- Zhou, X.; Wang, C.; Ma, Y. Vector Speed Regulation of an Asynchronous Motor Based on Improved First-Order Linear Active Disturbance Rejection Technology. Energies 2020, 13, 2168. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.C.; Lee, H.; Lee, J.K.; Choi, H.D.; Choi, K.; Kim, Y.; Kim, S.-K. Output-Feedback Multi-Loop Positioning Technique via Dual Motor Synchronization Approach for Elevator System Applications. Energies 2022, 15, 9147. https://doi.org/10.3390/en15239147
Lee HC, Lee H, Lee JK, Choi HD, Choi K, Kim Y, Kim S-K. Output-Feedback Multi-Loop Positioning Technique via Dual Motor Synchronization Approach for Elevator System Applications. Energies. 2022; 15(23):9147. https://doi.org/10.3390/en15239147
Chicago/Turabian StyleLee, Hyo Chan, Hyeoncheol Lee, Jae Kwang Lee, Hyun Duck Choi, Kyunghwan Choi, Yonghun Kim, and Seok-Kyoon Kim. 2022. "Output-Feedback Multi-Loop Positioning Technique via Dual Motor Synchronization Approach for Elevator System Applications" Energies 15, no. 23: 9147. https://doi.org/10.3390/en15239147
APA StyleLee, H. C., Lee, H., Lee, J. K., Choi, H. D., Choi, K., Kim, Y., & Kim, S.-K. (2022). Output-Feedback Multi-Loop Positioning Technique via Dual Motor Synchronization Approach for Elevator System Applications. Energies, 15(23), 9147. https://doi.org/10.3390/en15239147