



General Modelling Method for the Active Distribution Network with Multiple Types of Renewable Distributed Generations


Abstract
1. Introduction
2. Detailed Models of the Renewable DGs
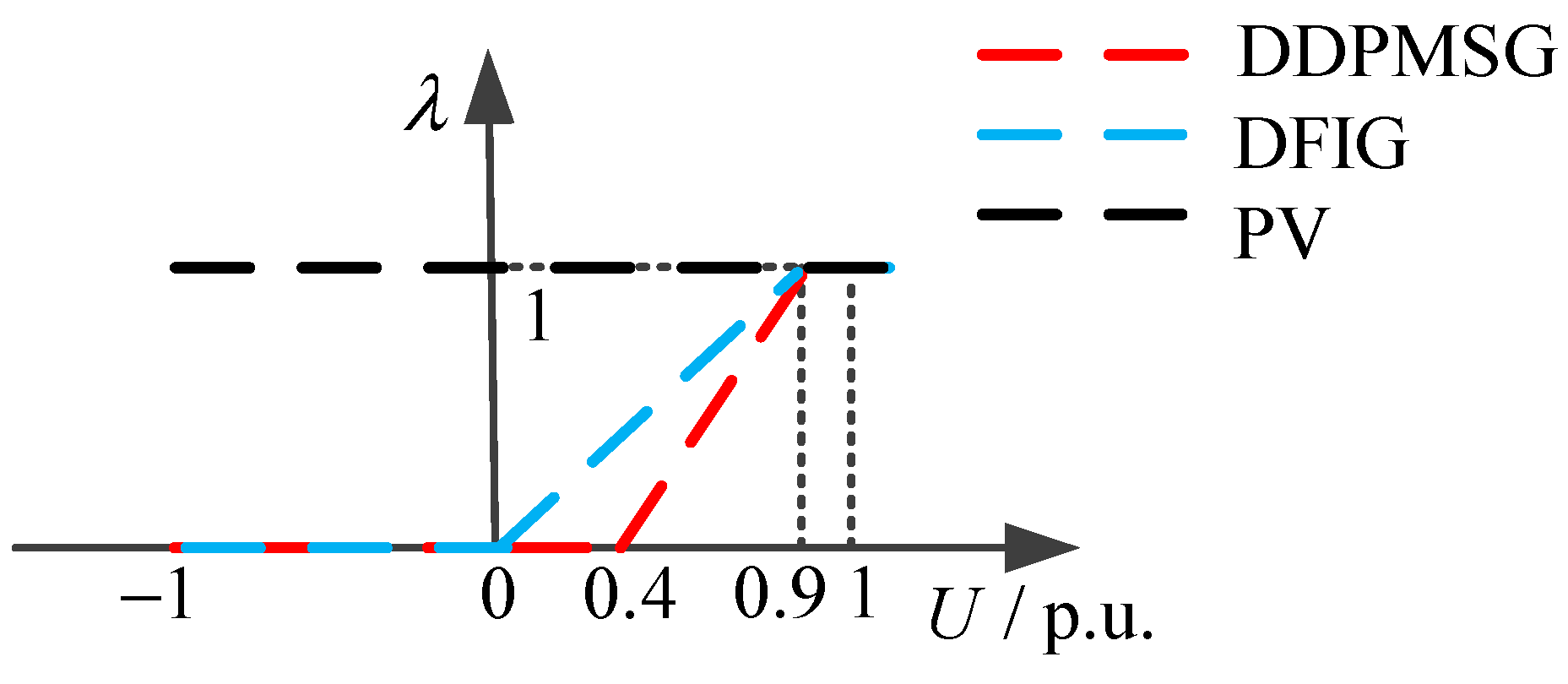
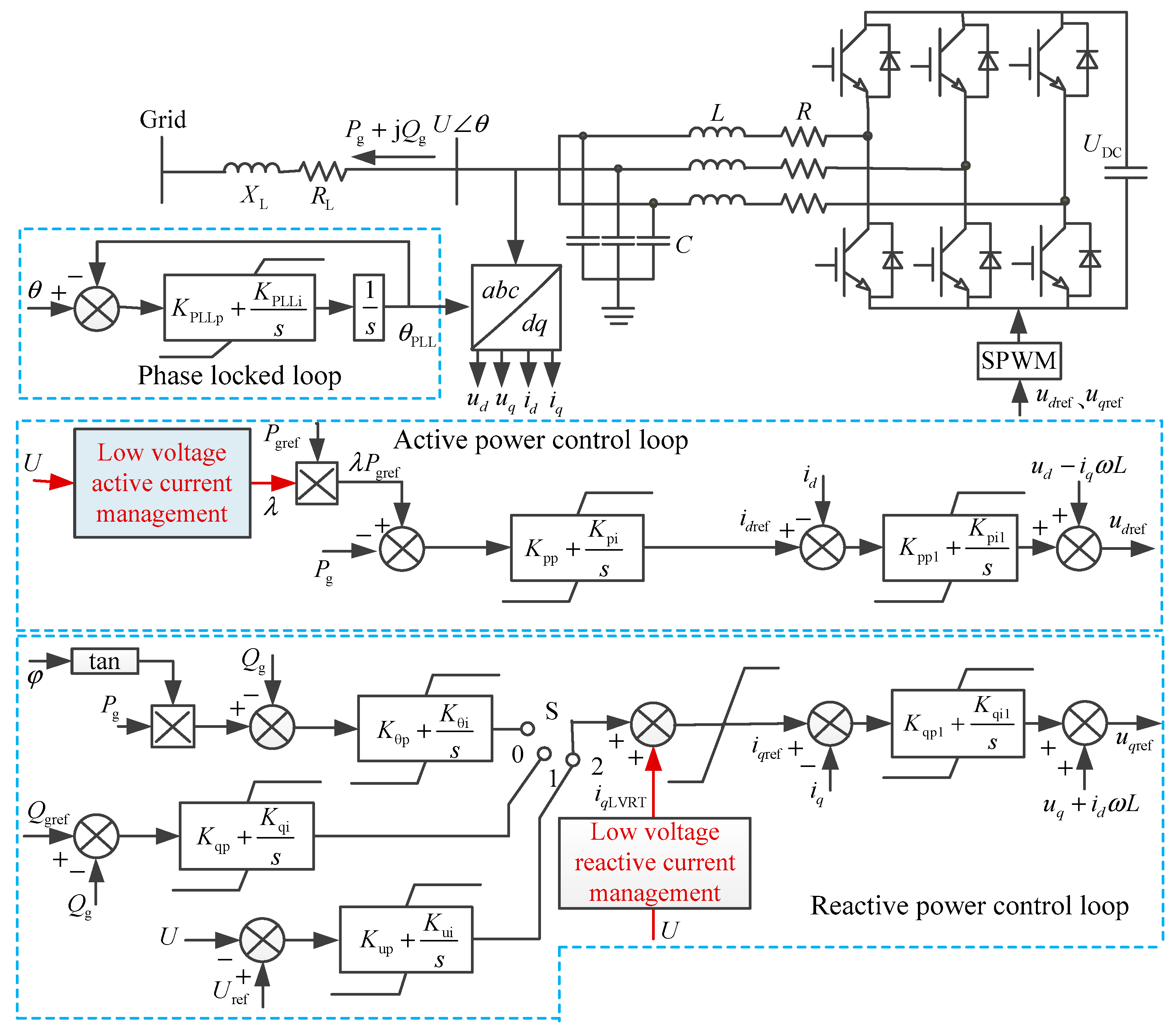
2.1. LVRT Control Strategy
2.2. Dynamic Responses of the DGs
3. A General Model of the Multiple Renewable DGs
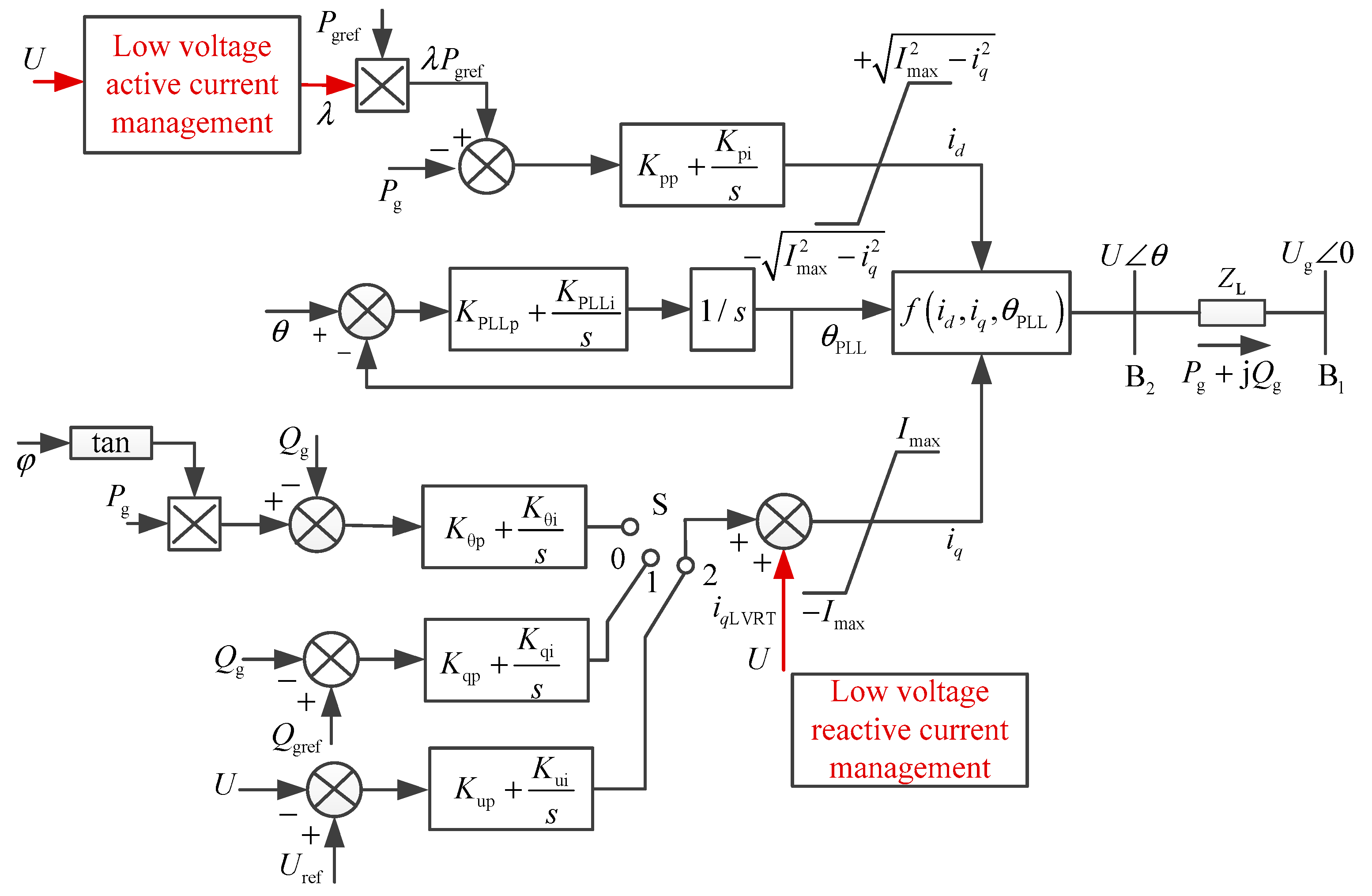
3.1. A Reduced Order Model for Renewable DGs
3.2. A General Model of the Multiple Renewable DGs
4. Model Aggregation for Multiple DGs
4.1. Aggregation of the LVACM and LVRCM
4.2. Determination of the Current Limit for the Equivalent Model
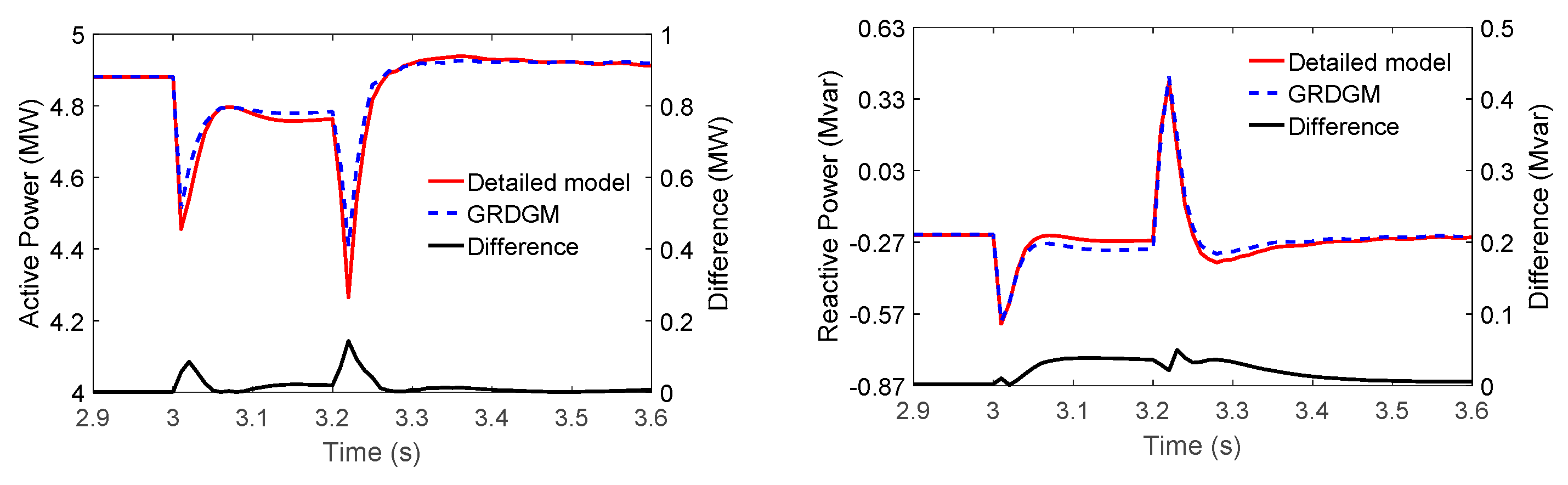
5. Effectiveness of the GRDGM for Describing Multiple Types of Renewable DGs
5.1. Parameter Estimation Results
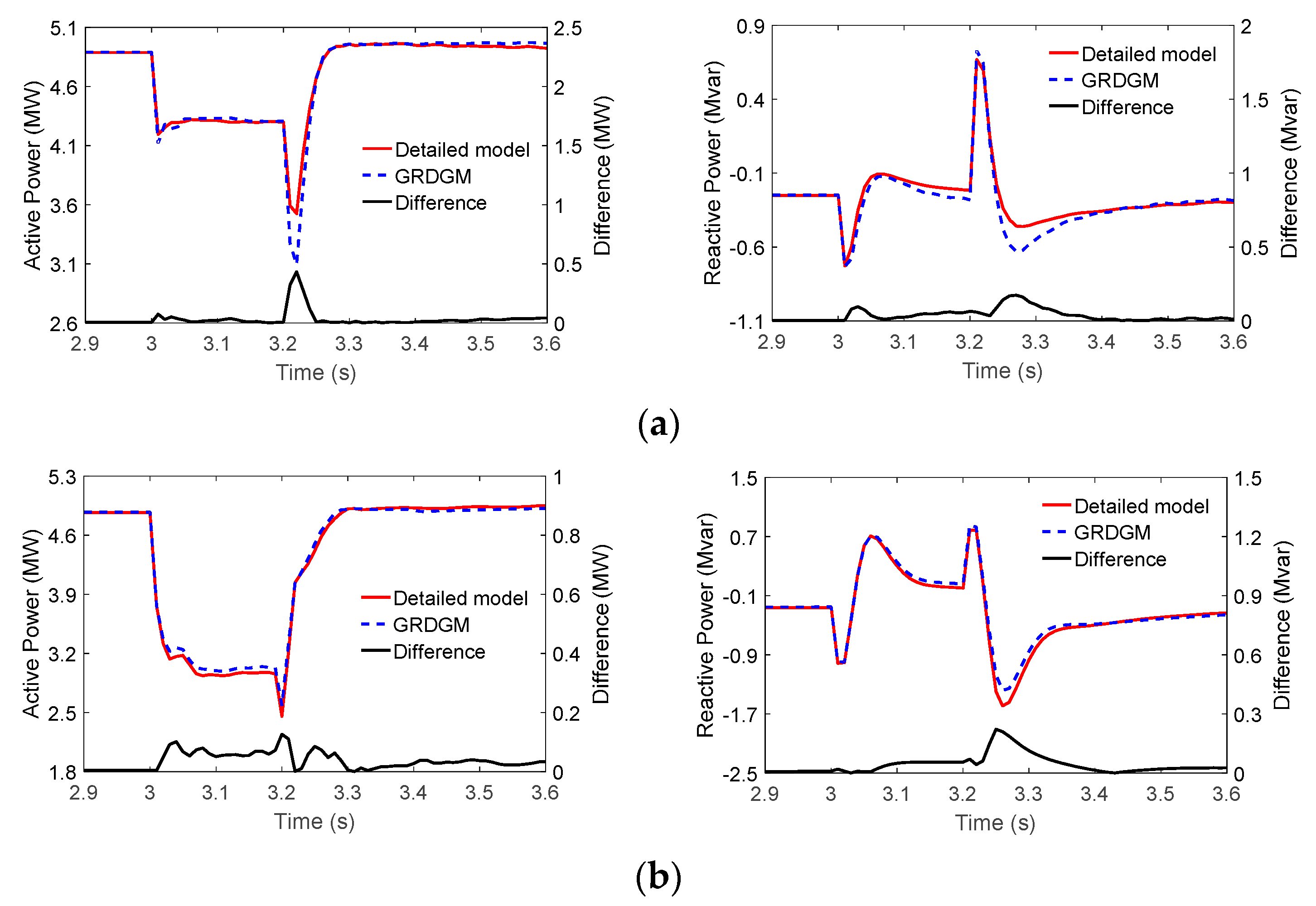
5.2. Adaptability of the GRDGM
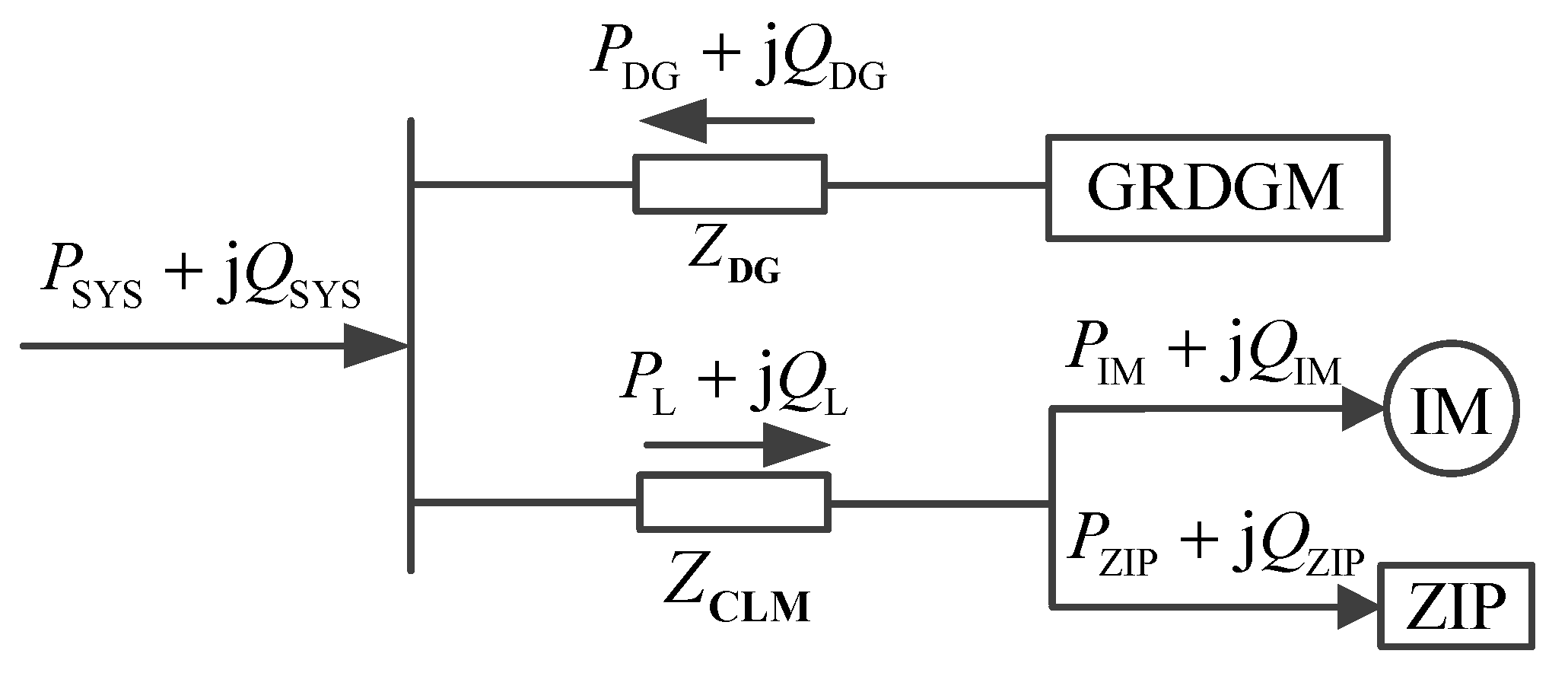
6. General Model of the ADN
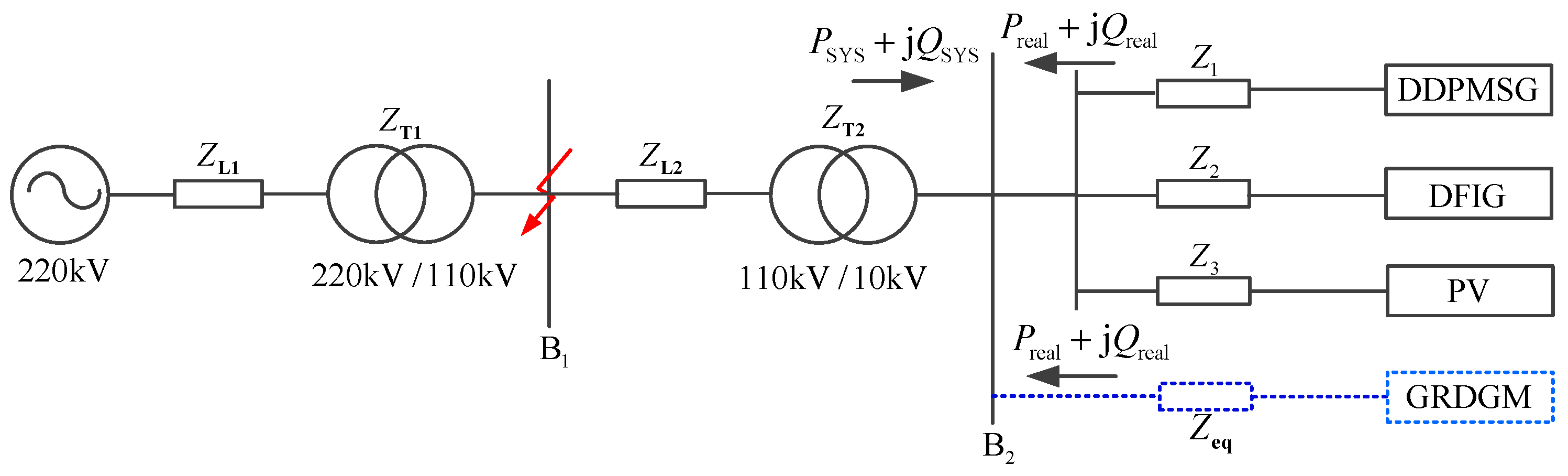
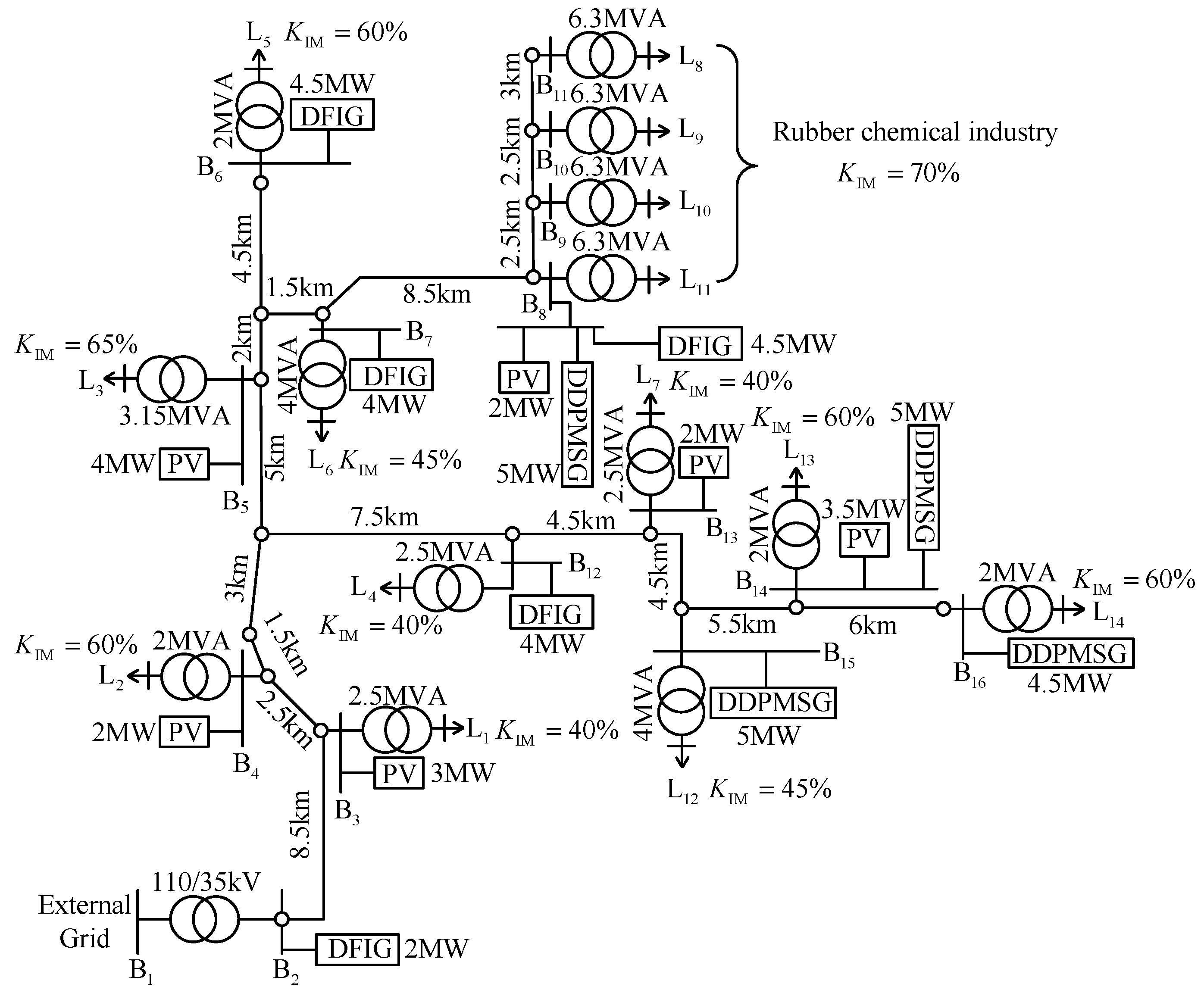
6.1. General ADN Model
6.2. Case Study
6.3. Adaptability Analysis
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| , , | Active power, reactive power, and terminal voltage of the DG |
| , | Voltage magnitude and phase of the DG |
| , | Resistance and reactance and capacitance of the transmission line |
| Voltage of the capacitor at the DC side | |
| Phase of the phase-locked loop | |
| , | d and q axis voltage |
| , | d and q axis voltage reference |
| , | d and q axis current |
| , | d and q axis current limit |
| , | d and q axis current reference |
| , , | Reference value of the active power, reactive power, and terminal voltage of the DG |
| , | Proportional and integral (PI) gains of the outer loop of the active power control |
| , | PI gains of the inner loop of the active power control |
| , | PI gains of PLL |
| , | PI gains of the constant power factor control |
| , | PI gains of the constant reactive power control |
| , | PI gains of the constant voltage power control |
| , | PI gains of the current inner loop for the reactive power control |
| Rotational angular frequency | |
| Power factor angle | |
| Additional active current of the LVRT control | |
| Rated voltage | |
| The converter’s current limit | |
| , | Active and reactive power consumed by the ZIP loads |
| , | Active and reactive power consumed by the motor load |
| , | The total active and reactive power consumed by ZIP and IM |
| , | The system’s total active and reactive power |
| , | Grid-connected impedances of the DG and CLM load |
| Equivalent impedance | |
| , | Real part and imaginary part of |
| , | Real part and imaginary part of |
| , | Real part and imaginary part of |
References
- Kosterev, D.N.; Taylor, C.W.; Mittelstadt, W.A. Model validation for the August 10, 1996 WSCC system outage. IEEE Trans. Power Syst. 1999, 14, 967–979. [Google Scholar] [CrossRef] [PubMed]
- Arif, A.; Wang, Z.; Wang, J.; Mather, B.; Bashualdo, H.; Zhao, D. Load modeling—A review. IEEE Trans. Smart Grid 2018, 9, 5986–5999. [Google Scholar] [CrossRef]
- Milanovic, J.V.; Yamashita, K.; Martínez Villanueva, S.; Djokic, S.Ž.; Korunović, L.M. International industry practice on power system load modeling. IEEE Trans. Power Syst. 2013, 28, 3038–3046. [Google Scholar] [CrossRef]
- Kosterev, D.; Meklin, A.; Undrill, J.; Lesieutre, B.; Price, W.; Chassin, D.; Bravo, R.; Yang, S. Load modeling in power system studies: WECC progress update. In Proceedings of the IEEE PES General Meeting, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–8. [Google Scholar]
- Paidi, E.S.N.R.; Nechifor, A.; Albu, M.M.; Yu, J.; Terzija, V. Development and validation of a new oscillatory component load model for real-time estimation of dynamic load model parameters. IEEE Trans. Power Deliv. 2020, 35, 618–629. [Google Scholar] [CrossRef]
- Chen, D.; Mohler, R.R. Neural-network-based load modeling and its use in voltage stability analysis. IEEE Trans. Control Syst. Technol. 2003, 11, 460–470. [Google Scholar] [CrossRef]
- Ma, Z.; Wang, Z.; Wang, Y.; Diao, R.; Shi, D. Mathematical representation of WECC composite load model. J. Mod. Power Syst. Clean Energy 2020, 8, 1015–1023. [Google Scholar] [CrossRef]
- Mat Zali, S.; Milanović, J.V. Generic model of active distribution network for large power system stability studies. IEEE Trans. Power Syst. 2013, 28, 3126–3133. [Google Scholar] [CrossRef]
- Zheng, C.; Wang, S.; Liu, Y.; Liu, C. A novel RNN based load modelling method with measurement data in active distribution system. Electr. Power Syst. Res. 2019, 166, 112–124. [Google Scholar] [CrossRef]
- Zaker, B.; Gharehpetian, G.B.; Karrari, M. A novel measurement-based dynamic equivalent model of grid-connected microgrids. IEEE Trans. Ind. Inf. 2019, 15, 2032–2043. [Google Scholar] [CrossRef]
- Wang, P.; Zhang, Z.; Huang, Q.; Tang, X.; Lee, W.-J. Robustness-improved method for measurement-based equivalent modeling of active distribution network. IEEE Trans. Ind. Appl. 2021, 57, 2146–2155. [Google Scholar] [CrossRef]
- Milanović, J.V.; Mat Zali, S. Validation of equivalent dynamic model of active distribution network cell. IEEE Trans. Power Syst. 2013, 28, 2101–2110. [Google Scholar] [CrossRef]
- Conte, F.; D’Agostino, F.; Silvestro, F. Operational constrained nonlinear modeling and identification of active distribution networks. Electr. Power Syst. Res. 2019, 168, 92–104. [Google Scholar] [CrossRef]
- Matevosyan, J.; Martínez Villanueva, S.; Djokic, S.Z.; Acosta, J.L.; Mat Zali, S.; Resende, F.O.; Milanovic, J.V. Aggregated models of wind-based generation and active distribution network cells for power system studies—Literature overview. In Proceedings of the 2011 IEEE Trondheim PowerTech, Trondheim, Norway, 19–23 June 2011; pp. 1–8. [Google Scholar]
- Ramasubramanian, D.; Yu, Z.; Ayyanar, R.; Vittal, V.; Undrill, J. Converter model for representing converter interfaced generation in large scale grid simulations. IEEE Trans. Power Syst. 2017, 32, 765–773. [Google Scholar] [CrossRef]
- Pourbeik, P. Proposal for the DER_A model. In Presentation WECC Meet. 2016. Available online: https://www.wecc.biz/Reliability/DER_A_Final.pdf (accessed on 20 July 2022).
- Takenobu, Y.; Akagi, S.; Ishii, H.; Hayashi, Y.; York, B.; Ramasubramanian, D.; Mitra, P.; Gaikwad, A.; York, B. Evaluation of dynamic voltage responses of distributed energy resources in distribution systems. In Proceedings of the 2018 IEEE Power & Energy Society General Meeting (PESGM), Portland, OR, USA, 5–10 August 2018; pp. 1–5. [Google Scholar]
- Li, Y.; Hu, S.; Zhang, X.; Tian, P. Dynamic equivalent of inverter-based distributed generations for large voltage disturbances. Energy Rep. 2022, 8, 14488–14497. [Google Scholar] [CrossRef]
- Ishchenko, A.; Jokic, A.; Myrzik, J.M.A.; Kling, W.L. Dynamic reduction of distribution networks with dispersed generation. In Proceedings of the 2005 International Conference on Future Power Systems, Amsterdam, The Netherlands, 18 November 2005; pp. 1–7. [Google Scholar]
- Ishchenko, A.; Myrzik, J.M.A.; Kling, W.L. Dynamic equivalencing of distribution networks with dispersed generation using Hankel norm approximation. IET Gen. Transm. Distrib. 2007, 1, 818–825. [Google Scholar] [CrossRef]
- Collin, A.J.; Tsagarakis, G.; Kiprakis, A.E.; McLaughlin, S. Development of Low-Voltage Load Models for the Residential Load Sector. IEEE Trans. Power Syst. 2014, 29, 2180–2188. [Google Scholar] [CrossRef]
- Yang, D.; Wang, B.; Cai, G.; Chen, Z.; Ma, J.; Sun, Z.; Wang, L. Data-driven estimation of inertia for multiarea interconnected power systems using dynamic mode decomposition. IEEE Trans. Ind. Inf. 2021, 17, 2686–2695. [Google Scholar] [CrossRef]
- Ku, B.-Y.; Thomas, R.J.; Chiou, C.-Y.; Lin, C.-J. Power system dynamic load modeling using artificial neural networks. IEEE Trans. Power Syst. 1994, 9, 1868–1874. [Google Scholar] [CrossRef]
- Keyhani, A.; Lu, W.; Heydt, G.T. Composite neural network load models for power system stability analysis. In Proceedings of the IEEE PES Power Systems Conference and Exposition, New York, NY, USA, 10–13 October 2004; pp. 1159–1163. [Google Scholar]
- Chávarro-Barrera, L.; Pérez-Londoño, S.; Mora-Flórez, J. An adaptive approach for dynamic load modeling in microgrids. IEEE Trans. Smart Grid 2021, 12, 2834–2843. [Google Scholar] [CrossRef]
- Li, W.; Chao, P.; Liang, X.; Xu, D.; Jin, W. An improved single-machine equivalent method of wind power plants by calibrating power recovery behaviors. IEEE Trans. Power Syst. 2018, 33, 4371–4381. [Google Scholar] [CrossRef]
- Chao, P.; Li, W.; Peng, S.; Liang, X.; Zhang, L.; Shuai, Y. Fault ride-through behaviors correction-based single-unit equivalent method for large photovoltaic power plants. IEEE Trans. Sustain. Energy 2021, 12, 715–726. [Google Scholar] [CrossRef]
- Manitoba Hydro International Ltd., Winnipeg, Manitoba, Canada, 2019. Simple Solar Farm 2019, Revision 2. Available online: https://www.pscad.com/knowledge-base/article/521 (accessed on 20 July 2022).
- Manitoba Hydro International Ltd., Winnipeg, Manitoba, Canada, 2018a. Type 3 Wind Turbine Model, Revision 3. Available online: https://www.pscad.com/knowledge-base/article/496 (accessed on 20 July 2022).
- Manitoba Hydro International Ltd., Winnipeg, Manitoba, Canada, 2018b. Type 4 Wind Turbine Model, Revision 3. Available online: https://www.pscad.com/knowledge-base/article/227 (accessed on 20 July 2022).
- Pourbeik, P.; Sanchez-Gasca, J.J.; Senthil, J.; Weber, J.D.; Zadehkhost, P.S.; Kazachkov, Y.; Tacke, S.; Wen, J.; Ellis, A. Generic dynamic models for modeling wind power plants and other renewable technologies in large-scale power system studies. IEEE Trans. Energy Convers. 2017, 32, 1108–1116. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.M. Conventional synchronous reference frame phase-locked loop is an adaptive complex filter. IEEE Trans. Ind. Electron. 2015, 62, 1679–1682. [Google Scholar] [CrossRef]
- Zhao, M.; Yuan, X.; Hu, J.; Yan, Y. Voltage dynamics of current control time-scale in a VSC-connected weak grid. IEEE Trans. Power Syst. 2016, 31, 2925–2937. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Estimation | Parameter | Estimation |
|---|---|---|---|
| (Ω) | 3.5117 | (Ω) | 5.4950 |
| 8.5231 | 0.07509 | ||
| 1.3200 | 0.1177 | ||
| 68.9987 | 2500.3433 |
| Parameter | Estimation | Parameter | Estimation |
|---|---|---|---|
| (Ω) | 3.4221 | (Ω) | 4.3953 |
| 2.8821 | 0.1291 | ||
| 1.1114 | 0.3437 | ||
| 114.1579 | 2791.2335 | ||
| (Ω) | 5.7222 | (Ω) | 6.5241 |
| (p.u.) | 0.0599 | (s) | 1.0812 |
| (%) | 1.6774 | \ | \ |
| (%) | 64.1446 | (%) | 102.3873 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Pan, X.; Sun, X.; Cheng, X. General Modelling Method for the Active Distribution Network with Multiple Types of Renewable Distributed Generations. Energies 2022, 15, 8931. https://doi.org/10.3390/en15238931
Chen H, Pan X, Sun X, Cheng X. General Modelling Method for the Active Distribution Network with Multiple Types of Renewable Distributed Generations. Energies. 2022; 15(23):8931. https://doi.org/10.3390/en15238931
Chicago/Turabian StyleChen, Haidong, Xueping Pan, Xiaorong Sun, and Xiaomei Cheng. 2022. "General Modelling Method for the Active Distribution Network with Multiple Types of Renewable Distributed Generations" Energies 15, no. 23: 8931. https://doi.org/10.3390/en15238931
APA StyleChen, H., Pan, X., Sun, X., & Cheng, X. (2022). General Modelling Method for the Active Distribution Network with Multiple Types of Renewable Distributed Generations. Energies, 15(23), 8931. https://doi.org/10.3390/en15238931