
Characteristics Evaluation of a Segmental Rotor Type Switched Reluctance Motor with Concentrated Winding for Torque Density and Efficiency Improvement



Abstract
1. Introduction
2. Structure of Traditional and Proposed SRMs
2.1. Structure of Traditional SRM
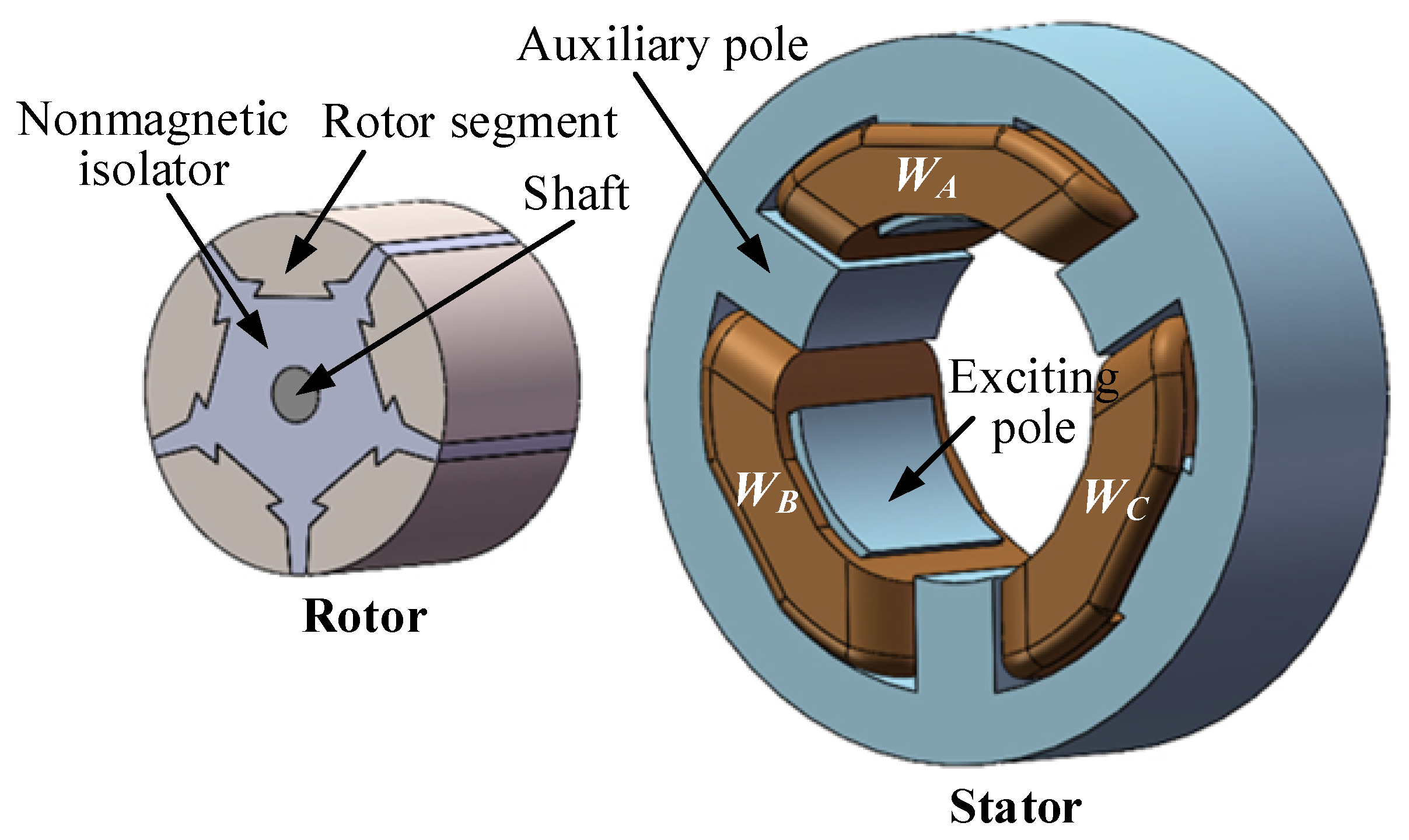
2.2. Structure of Proposed SRM
3. Characteristics Analysis and Comparison of Traditional and Proposed SRMs
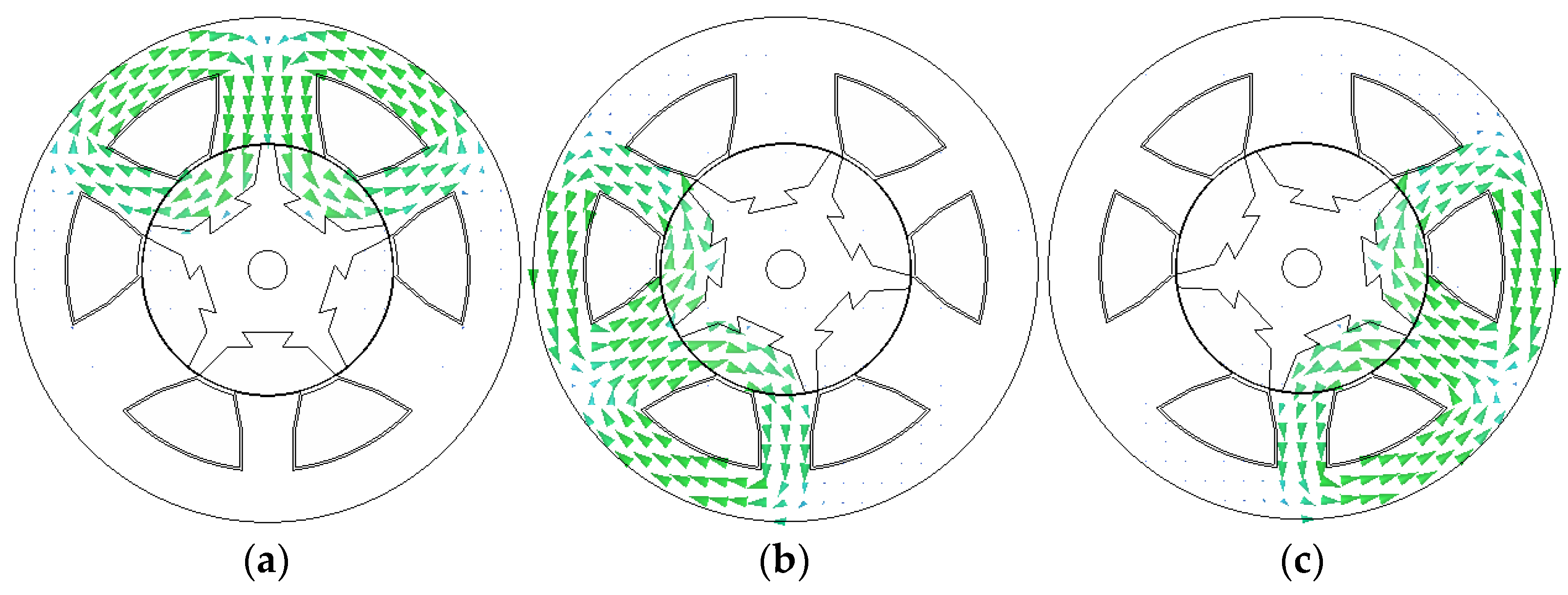
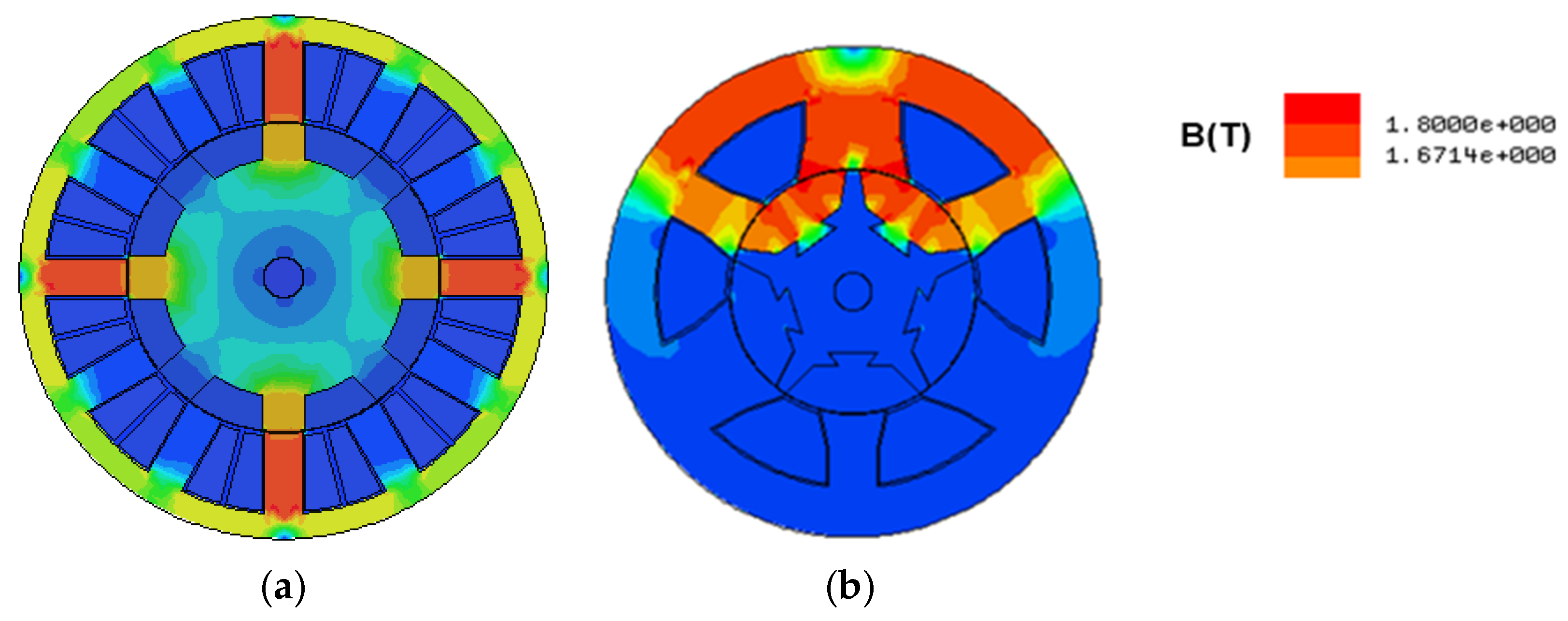
3.1. Magnetic Flux Density Comparison
3.2. Inductance Comparison
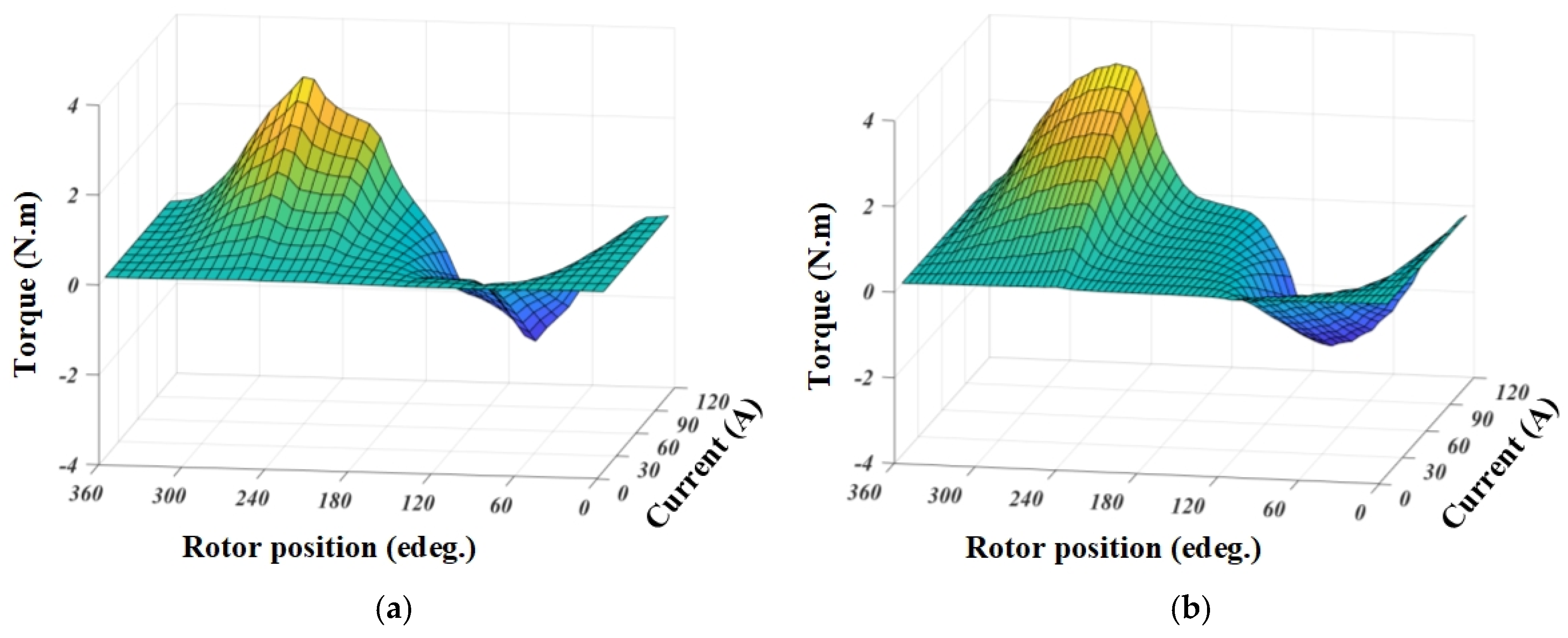
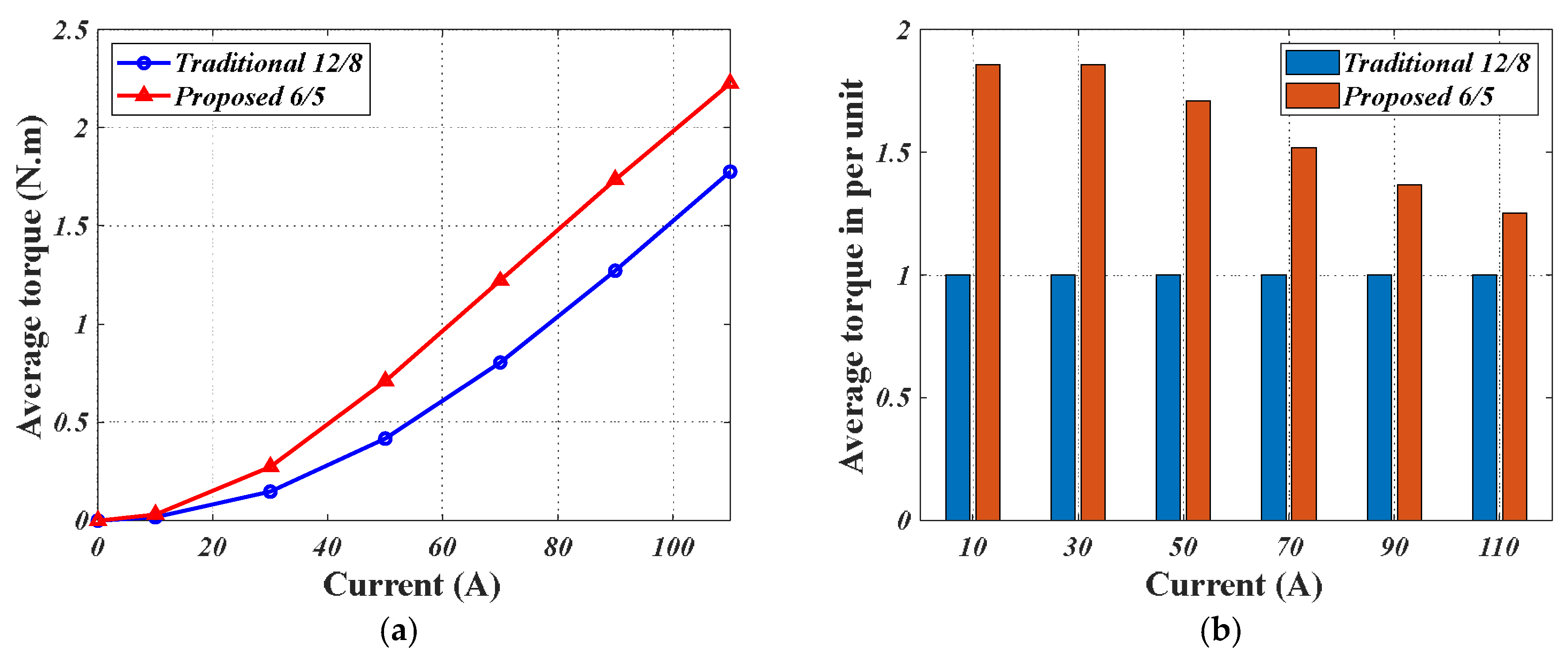
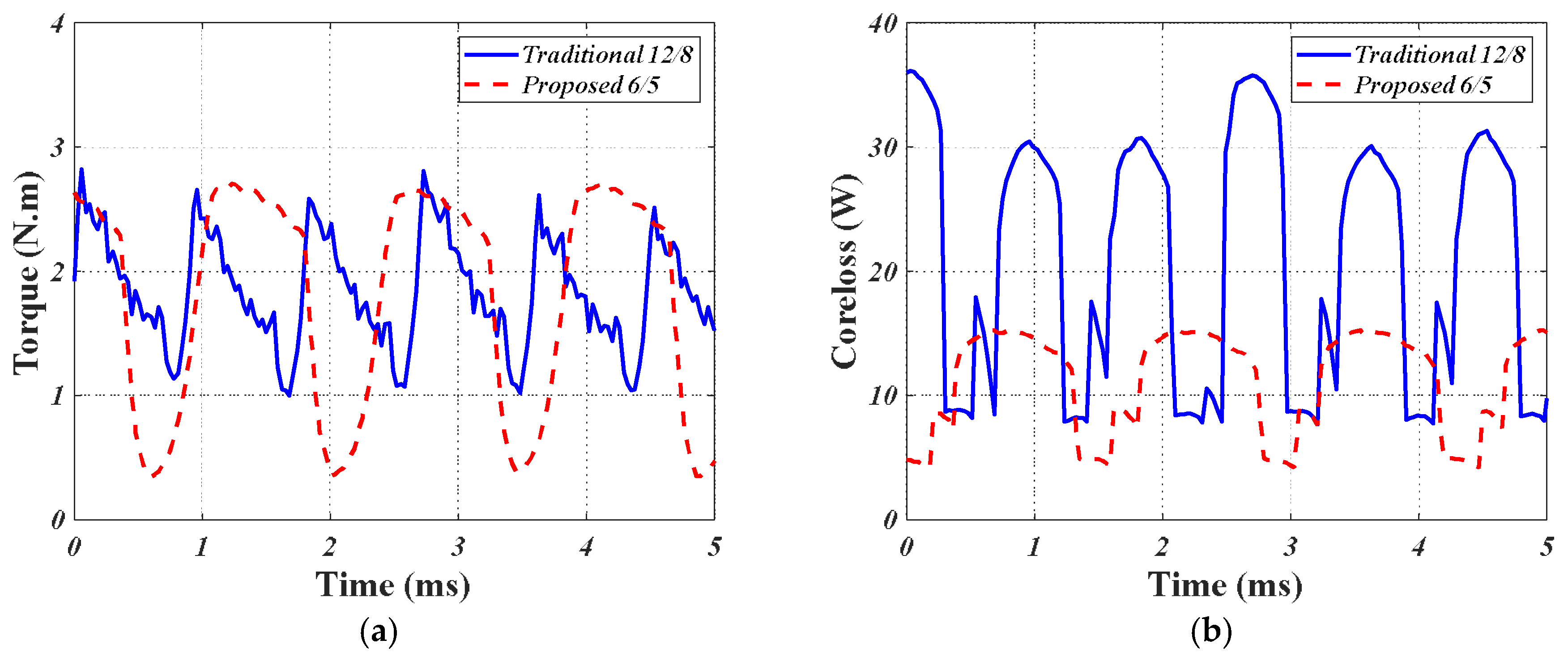
3.3. Torque Comparison
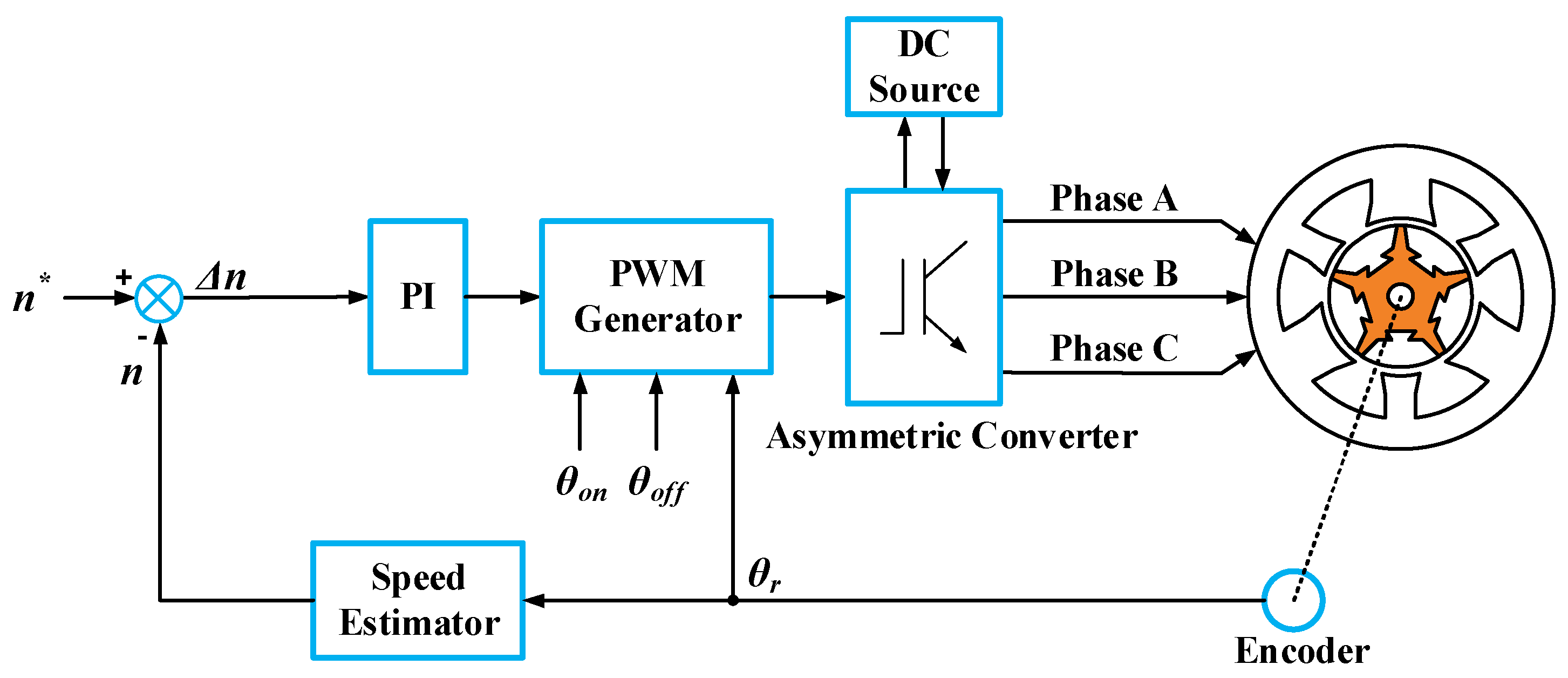
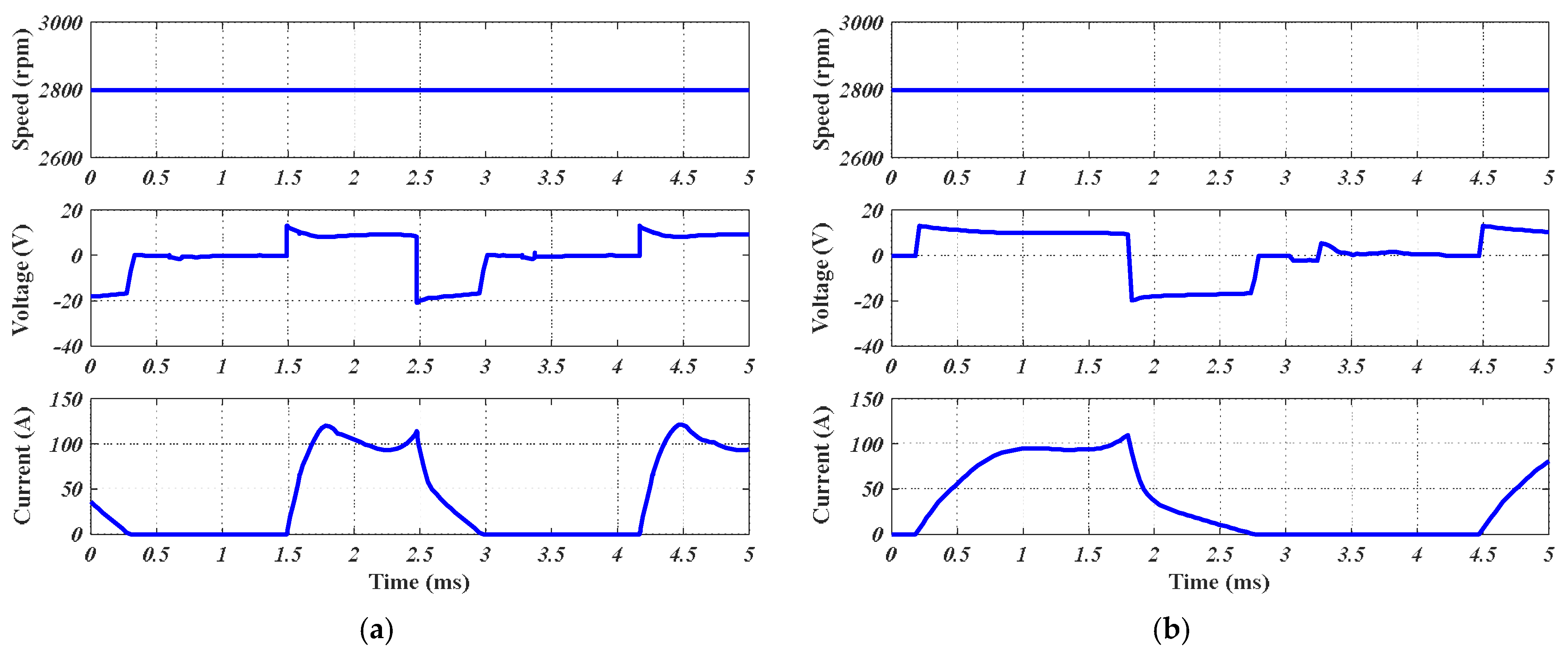
3.4. Steady-State Characteristics Comparison
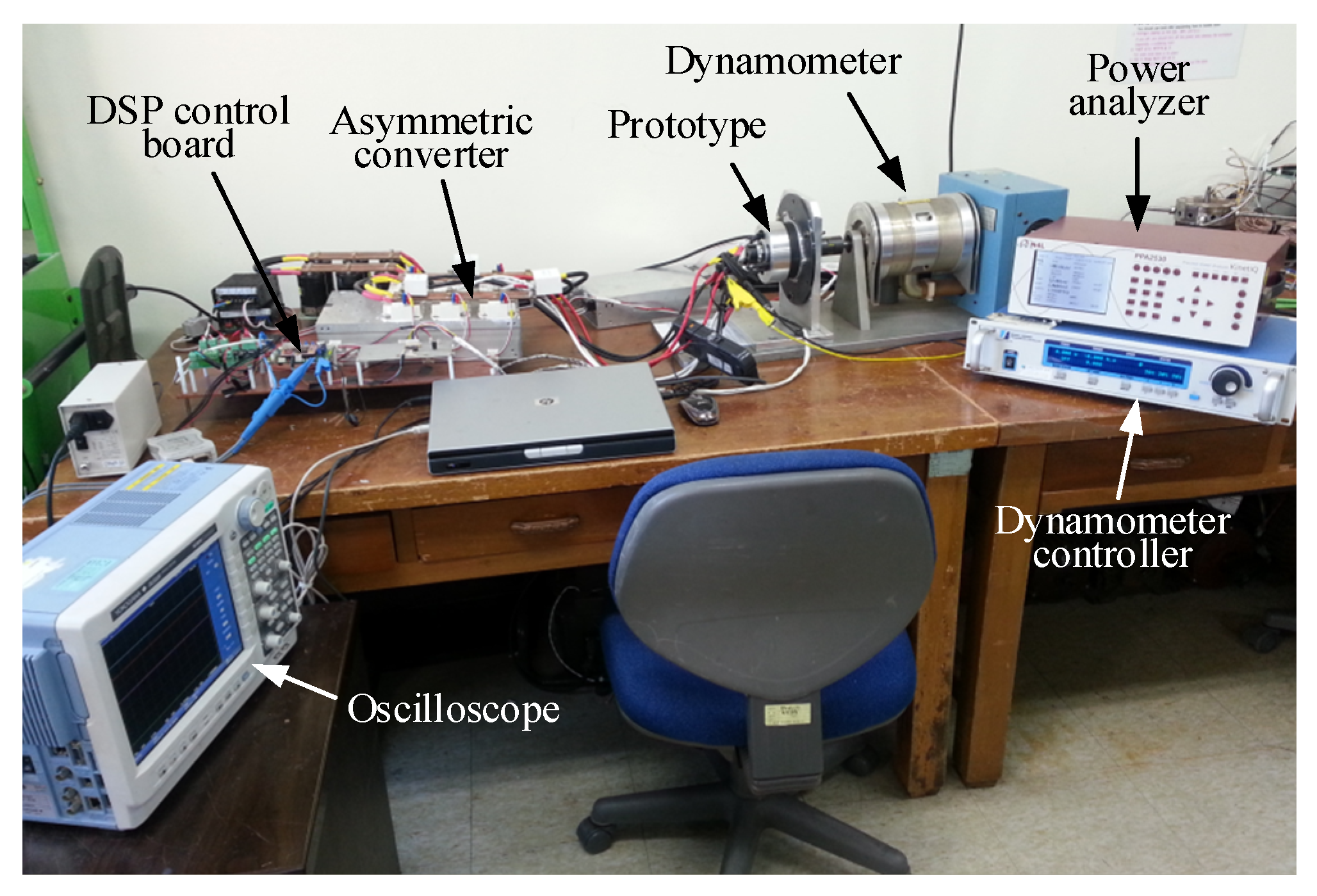
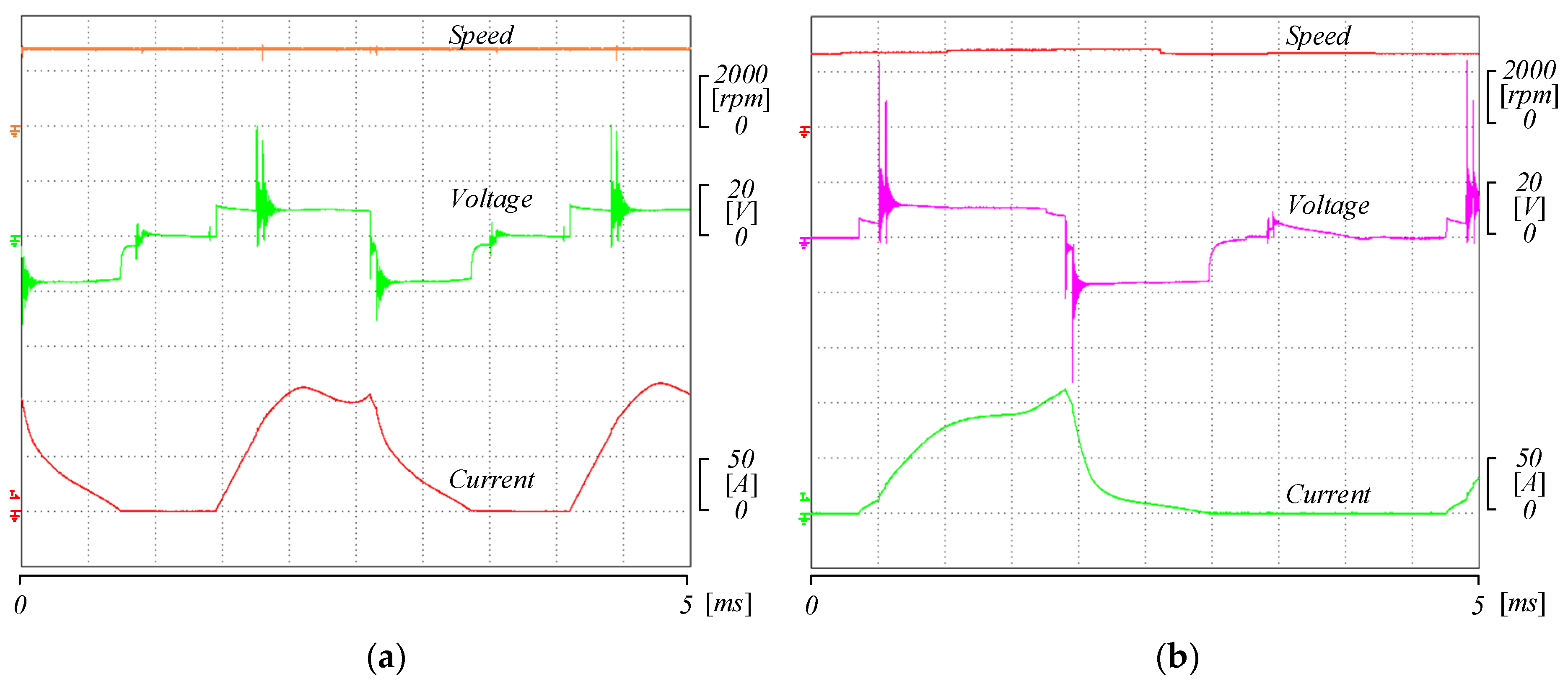
4. Experimental Verification
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mecrow, B.C.; Finch, J.W.; I-Kharashi, E.A.E.; Jack, A.G. Switched reluctance motors with segmental rotors. IEEE Proc. Electr. Power Appl. 2002, 149, 245–254. [Google Scholar] [CrossRef]
- Oyama, J.; Higuchi, T.; Abe, T.; Tanaka, K. The fundamental characteristics of novel switched reluctance motor with segment core embedded in aluminum rotor block. J. Electr. Eng. Technol. 2006, 1, 58–62. [Google Scholar] [CrossRef][Green Version]
- Higuchi, T.; Suenaga, K.; Abe, T. Torque ripple reduction of novel segment type switched reluctance motor by increasing phase number. In Proceedings of the 2009 International Conference on Electrical Machine and Systems (ICEMS 2009), Tokyo, Japan, 15–18 November 2009. [Google Scholar]
- Higuchi, T.; Nakao, Y.; Abe, T. Characteristics of a novel segment type SRM with 2-step slide rotor. In Proceedings of the 2009 International Conference on Electrical Machine and Systems (ICEMS 2009), Tokyo, Japan, 15–18 November 2009. [Google Scholar]
- Chen, X.Y.; Deng, Z.Q.; Wang, X.L.; Peng, J.J.; Li, X.S. New designs of switched reluctance motors with segmental rotors. In Proceedings of the 5th IET International Conference on Power Electronics, Machines and Drives (PEMD 2010), Brighton, UK, 19–21 April 2010. [Google Scholar]
- Lan, Y.; Peng, W.; Aksoz, A.; Benomar, Y.; Bossche, P.V.; Baghdadi, M.E.; Hegazy, O. Design and modelling of 12/4 fully-pitched segmental switched reluctance motors. In Proceedings of the 2020 Fifteenth International Conference on Ecological Vehicles and Renewable Energies (EVER 2020), Monte-Carlo, Monaco, 10–12 September 2020. [Google Scholar]
- Vandana, R.; Vattikuti, N.; Fernandes, B.G. A novel high power density segmented switched reluctance machine. In Proceedings of the 2008 IEEE Industry Applications Society Annual Meeting, Edmonton, AB, Canada, 5–9 October 2008. [Google Scholar]
- Mecrow, B.C.; I-Kharashi, E.A.E.; Finch, J.W.; Jack, A.G. Segmental rotor switched reluctance motors with single-tooth windings. IEEE Proc. Electr. Power Appl. 2003, 150, 591–599. [Google Scholar] [CrossRef]
- Mecrow, B.C.; I-Kharashi, E.A.E.; Finch, J.W.; Jack, A.G. Preliminary performance evaluation of switched reluctance motors with segmental rotors. IEEE Trans. Energy Convers. 2004, 19, 679–686. [Google Scholar] [CrossRef]
- Widmer, J.D.; Martin, R.; Mecrow, B.C. Optimization of an 80-kW segmental rotor switched reluctance machine for automotive traction. IEEE Trans. Ind. Appl. 2015, 51, 2990–2999. [Google Scholar] [CrossRef]
- Xu, Z.; Liu, J.; Kim, M.J.; Lee, D.H.; Ahn, J.W. Characteristics analysis and comparison of conventional and segmental rotor type 12/8 switched reluctance motors. IEEE Trans. Ind. Appl. 2019, 55, 3129–3137. [Google Scholar] [CrossRef]
- Sun, X.; Diao, K.; Lei, G.; Guo, Y.; Zhu, J. Real-time HIL emulation for a segmented-rotor switched reluctance motor using a new magnetic equivalent circuit. IEEE Trans. Power Electron. 2020, 35, 3841–3849. [Google Scholar] [CrossRef]
- Sun, X.; Diao, K.; Lei, G.; Guo, Y.; Zhu, J. Study on segmented-rotor switched reluctance motors with different rotor pole numbers for BSG system of hybrid Electric vehicles. IEEE Trans. Veh. Technol. 2019, 68, 5537–5547. [Google Scholar] [CrossRef]
- Sun, W.; Li, Q.; Sun, L.; Zhu, L.; Li, L. Electromagnetic analysis on novel rotor-segmented axial-field SRM based on dynamic magnetic equivalent circuit. IEEE Trans. Magn. 2019, 55, 1–5. [Google Scholar] [CrossRef]
- Sun, X.; Shen, Y.; Wang, S.; Lei, G.; Yang, Z.; Han, S. Core losses analysis of a novel 16/10 segmented rotor switched reluctance BSG motor for HEVs using nonlinear lumped parameter equivalent circuit model. IEEE/ASME Trans. Mechatron. 2018, 23, 747–757. [Google Scholar] [CrossRef]
- Al-Amyal, F.; Hamouda, M.; Száme, L. Performance improvement based on adaptive commutation strategy for switched reluctance motors using direct torque control. Alex. Eng. J. 2022, 61, 9219–9233. [Google Scholar] [CrossRef]
- Al-Amyal, F.; Számel, L. Research on novel hybrid torque sharing function for switched reluctance motors. IEEE Access 2022, 10, 91306–91315. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Traditional 12/8 SRM | Proposed 6/5 SRM |
|---|---|---|
| Stator outer radius (mm) | 52.5 | 52.5 |
| Stator inner radius (mm) | 31.25 | 26.25 |
| Rotor inner radius (mm) | 24 | N/A |
| Shaft radius (mm) | 4 | 4 |
| Air gap (mm) | 0.25 | 0.25 |
| Stator yoke thickness (mm) | 5 | 10 |
| Stator pole arc (deg.) | 14 | 54/30 |
| Rotor pole arc (deg.) | 16 | 66 |
| Stack length (mm) | 35 | 35 |
| Turns number of windings per phase | 20 | 14 |
| Resistance per phase (mΩ) | 7.0 | 6.9 |
| Parameter | Traditional 12/8 SRM | Proposed 6/5 SRM |
|---|---|---|
| Rated speed (r/min) | 2800 | 2800 |
| Rated torque (N.m) | 1.7 | 1.7 |
| Switch-on angle (deg.) | 23.3 | 33.8 |
| Switch-off angle (deg.) | 40.9 | 61.0 |
| Torque ripple (%) | 97.0 | 126.4 |
| RMS value of phase current (A) | 62.5 | 53.9 |
| Copper loss (W) | 82.5 | 59.4 |
| Core loss (W) | 20.3 | 10.5 |
| Mechanical loss (W) | 12.5 | 12.5 |
| Stary loss (W) | 7.3 | 5.3 |
| Output power (W) | 498.5 | 498.5 |
| Input power (W) | 621.1 | 586.2 |
| Efficiency (%) | 80.3 | 85.0 |
| Parameter | Traditional 12/8 SRM | Proposed 6/5 SRM | ||
|---|---|---|---|---|
| Simulation | Test | Simulation | Test | |
| Rated speed (r/min) | 2800 | 2800 | 2800 | 2800 |
| Rated torque (N.m) | 1.7 | 1.7 | 1.7 | 1.7 |
| RMS value of phase current (A) | 62.5 | 64.9 | 53.9 | 55.1 |
| Copper loss (W) | 82.5 | 88.4 | 59.4 | 62.8 |
| Core loss (W) | 20.3 | 27.1 | 10.5 | 17.9 |
| Mechanical loss (W) | 12.5 | 14.3 | 12.5 | 13.4 |
| Stary loss (W) | 7.3 | 8.3 | 5.3 | 6.0 |
| Output power (W) | 498.5 | 498.1 | 498.5 | 498.1 |
| Input power (W) | 621.1 | 636.2 | 586.2 | 598.2 |
| Efficiency (%) | 80.3 | 78.3 | 85.0 | 83.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Z.; Li, T.; Zhang, F.; Wang, H.; Lee, D.-H.; Ahn, J.-W. Characteristics Evaluation of a Segmental Rotor Type Switched Reluctance Motor with Concentrated Winding for Torque Density and Efficiency Improvement. Energies 2022, 15, 8915. https://doi.org/10.3390/en15238915
Xu Z, Li T, Zhang F, Wang H, Lee D-H, Ahn J-W. Characteristics Evaluation of a Segmental Rotor Type Switched Reluctance Motor with Concentrated Winding for Torque Density and Efficiency Improvement. Energies. 2022; 15(23):8915. https://doi.org/10.3390/en15238915
Chicago/Turabian StyleXu, Zhenyao, Tao Li, Fengge Zhang, Huijun Wang, Dong-Hee Lee, and Jin-Woo Ahn. 2022. "Characteristics Evaluation of a Segmental Rotor Type Switched Reluctance Motor with Concentrated Winding for Torque Density and Efficiency Improvement" Energies 15, no. 23: 8915. https://doi.org/10.3390/en15238915
APA StyleXu, Z., Li, T., Zhang, F., Wang, H., Lee, D.-H., & Ahn, J.-W. (2022). Characteristics Evaluation of a Segmental Rotor Type Switched Reluctance Motor with Concentrated Winding for Torque Density and Efficiency Improvement. Energies, 15(23), 8915. https://doi.org/10.3390/en15238915