
Optimal Design of Permanent Magnet Synchronous Machine Based on Random Walk Method and Semi 3D Magnetic Equivalent Circuit Considering Overhang Effect

 , , , and
, , , and
Abstract
:1. Introduction
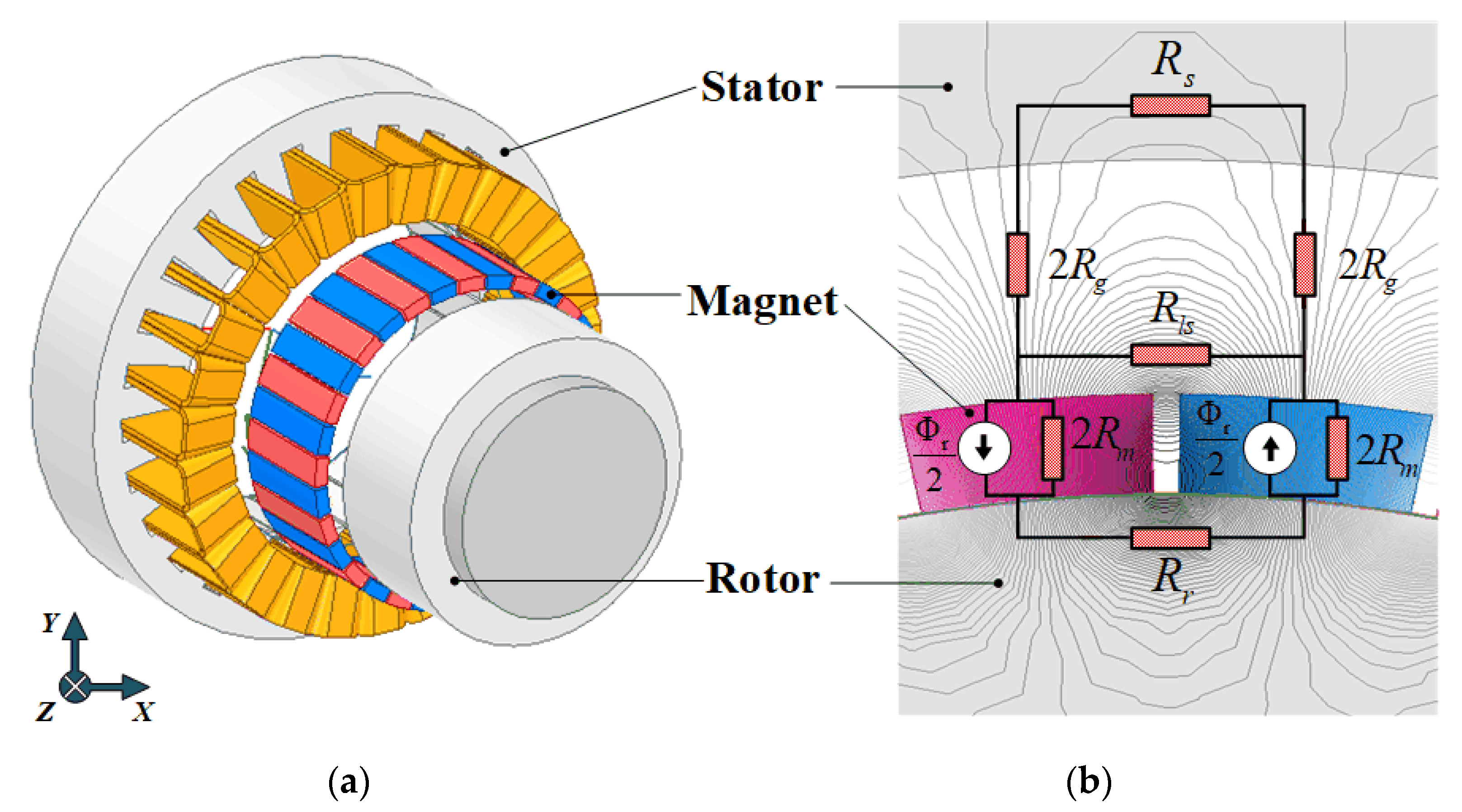
2. Magnetic Equivalent Circuit Model of PMSM
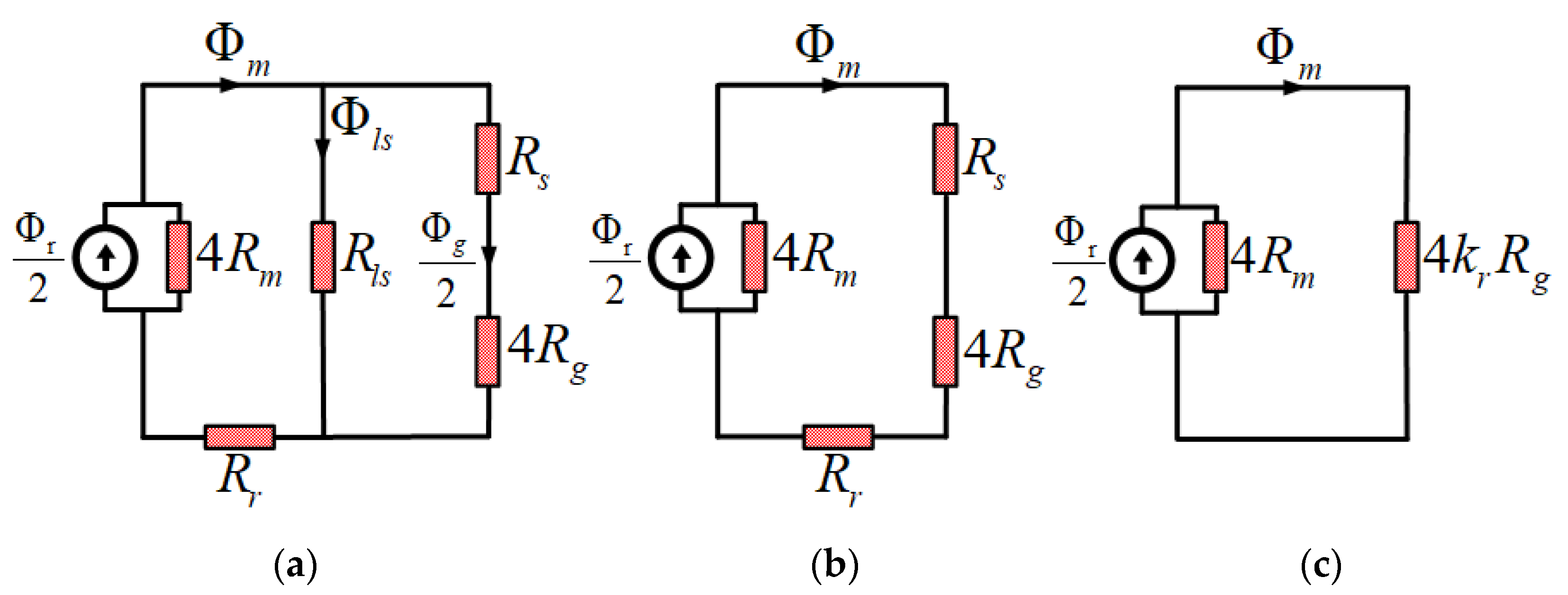
2.1. Simplification of MEC
2.2. Slotting Effect Using Carter’s Coefficient
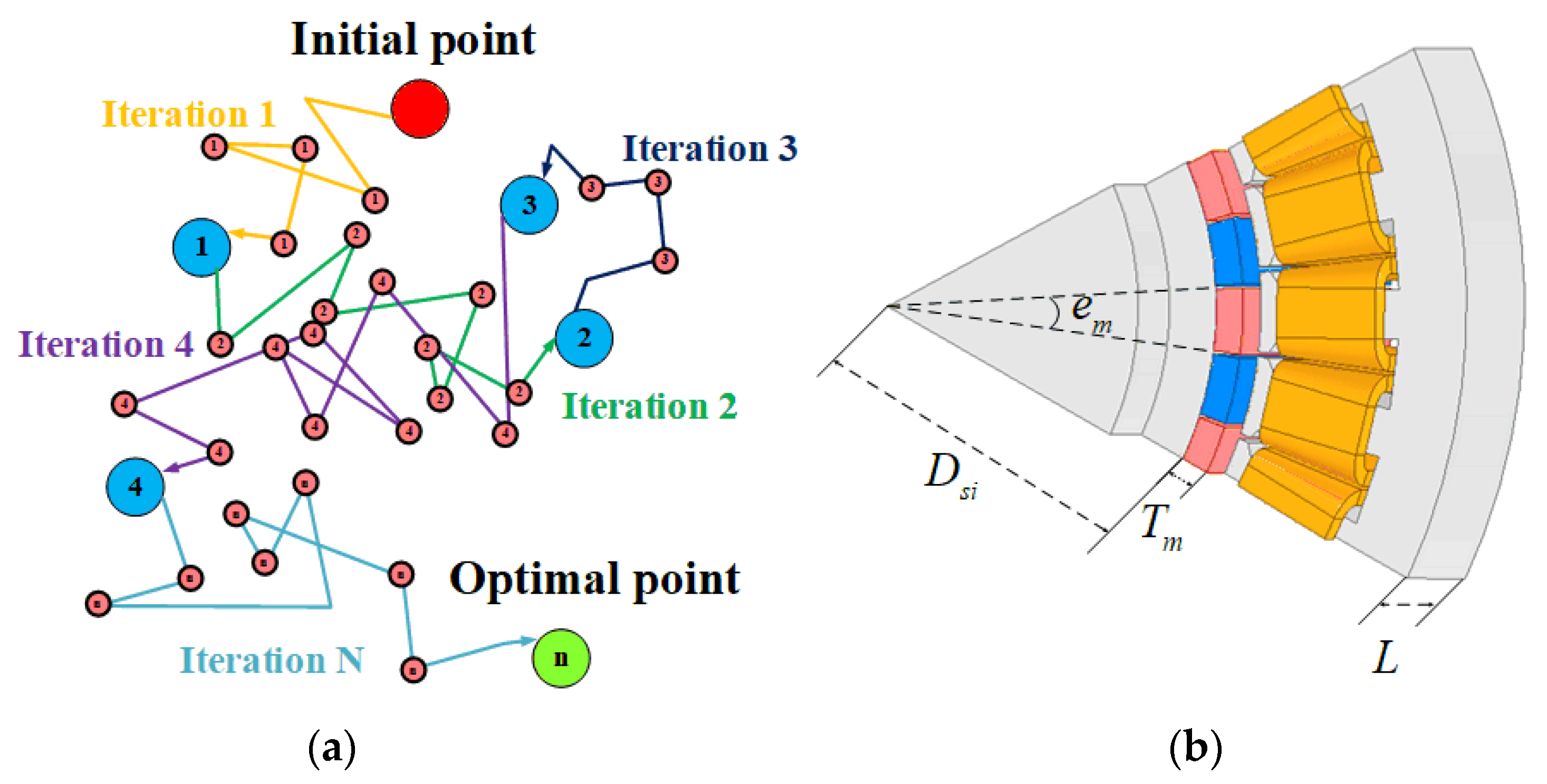
2.3. D MEC Considering Overhang Structure
2.4. Electromagnetic Analysis Based on MEC
3. Optimal Design of PMSM Using RWA
3.1. Random Walk Algorithm’s Method
- Zn: variable value
- Walk: search range
- Radom: A random number between −1 and 1
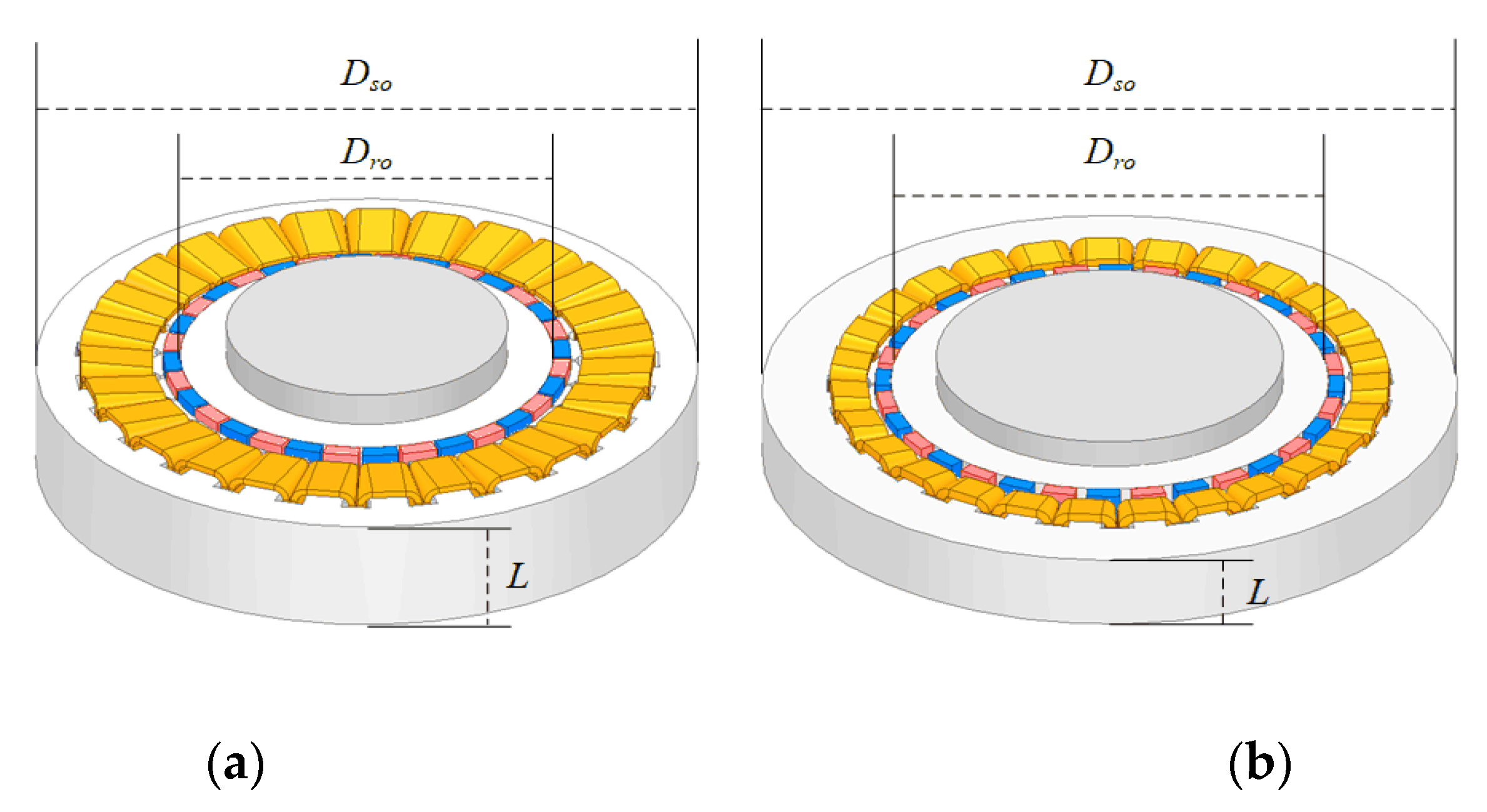
3.2. Optimal Design Application of PMSM
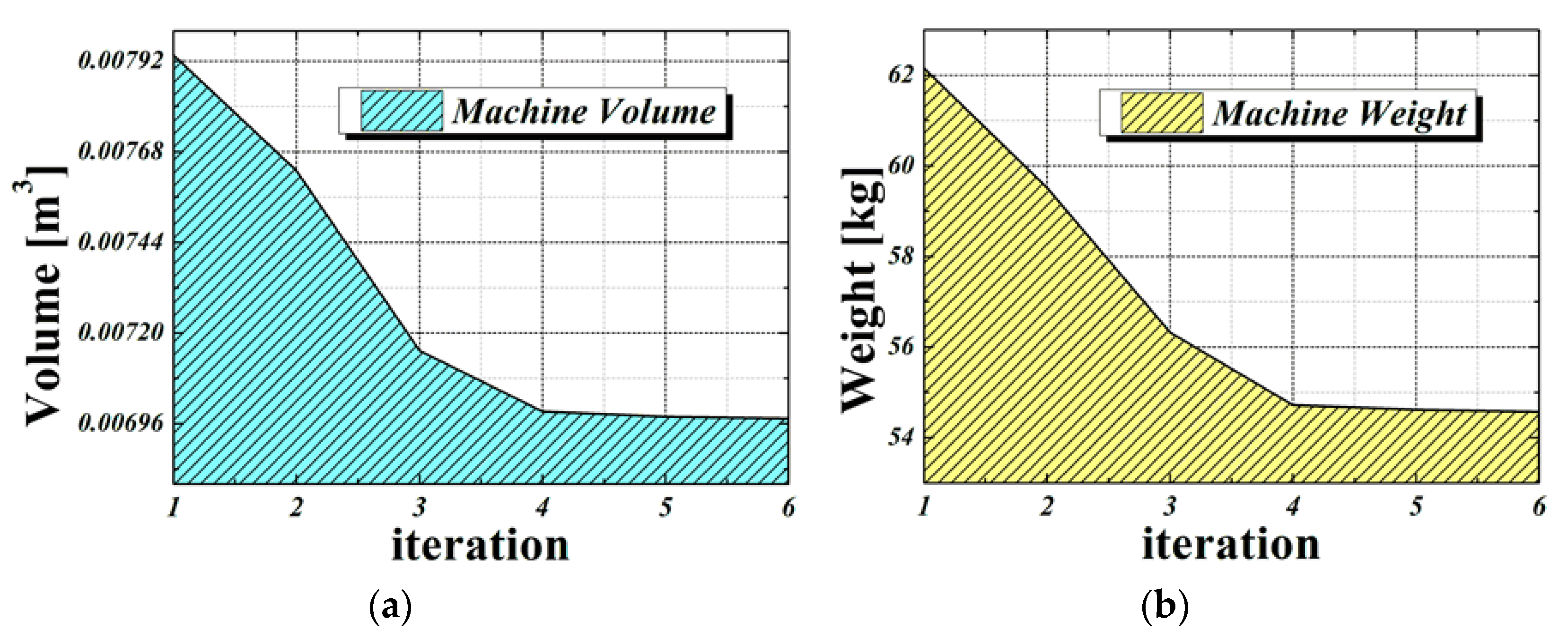
3.3. PMSM Optimal Design Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Woo, D.-K.; Lim, D.-K.; Yeo, H.-K.; Ro, J.-S.; Jung, H.-K. A 2-D Finite-Element Analysis for a Permanent Magnet Synchronous Motor Taking an Overhang Effect into Consideration. IEEE Trans. Magn. 2013, 49, 4894–4899. [Google Scholar] [CrossRef]
- Kim, K.-C.; Koo, D.-H.; Lee, J. The Study on the Overhang Coefficient for Permanent Magnet Machine by Experimental Design Method. IEEE Trans. Magn 2007, 43, 2483–2485. [Google Scholar] [CrossRef]
- Hendershot, J.R., Jr.; Miller, J.R.E. Design of Brushless Permanent-Magnet Motors; MagnaPhysics: Hillsboro, OH, USA; Oxford, UK, 1994; pp. 150–160. [Google Scholar]
- Yeo, H.-K.; Lim, D.-K.; Woo, D.-K.; Ro, J.-S.; Jung, H.-K. Magnetic Equivalent Circuit Model Considering Overhang Structure of a Surface-Mounted Permanent-Magnet Motor. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar]
- Boldea, I.; Nasar, S.A. The Induction Machine Handbook; CRC express: Boca Raton, FL, USA, 2001; pp. 143–150. [Google Scholar]
- Hanselman, D.C. Brushless Permanent Magnet Motor Design; MagnaPhysics: Hillsboro, OR, USA; Oxford, MS, USA, 2003; pp. 16–38. [Google Scholar]
- Yeo, H.-K.; Ro, J.-S. Novel Analytical Method for Overhang Effects in Surface-Mounted Permanent-Magnet Machines. IEEE Trans. Magn. 2019, 7, 148453–148461. [Google Scholar] [CrossRef]
- Pluk, K.J.W.; Jansen, J.W.; Lomonova, E.A. 3-D Hybrid Analytical Modeling: 3-D Fourier Modeling Combined with Mesh-Based 3-D Magnetic Equivalent Circuits. IEEE Trans. Magn. 2015, 51, 11–13. [Google Scholar]
- Song, J.-Y.; Lee, J.H.; Kim, Y.-J.; Jung, S.-Y. Computational Method of Effective Remanence Flux Density to Consider PM Overhang Effect for Spoke-Type PM Motor With 2-D Analysis Using Magnetic Energy. IEEE Trans. Magn. 2016, 52, 2–4. [Google Scholar] [CrossRef]
- Shin, H.-S.; Shin, K.-H.; Jang, G.-H.; Cho, S.-K.; Jung, K.-H.; Choi, J.-Y. Experimental Verification and 2D Equivalent Analysis Techniques of BLDC Motor with Permanent Magnet Overhang and Housing-Integrated Rotor Core. IEEE TAS 2020, 30, 2–3. [Google Scholar] [CrossRef]
- Busch, T.J.; Lax, J.D.; Lipo, T.A. Magnetic circuit modeling of the field regulated reluctance machine Part II: Saturation modeling and results. IEEE Trans. Energy Convers 1996, 11, 57–59. [Google Scholar] [CrossRef]
- Hsieh, M.-F.; Hsu, Y.-C. A Generalized Magnetic Circuit Modeling Approach for Design of Surface Permanent-Magnet Machines. IEEE Trans. Industr. Electron. 2012, 59, 782–787. [Google Scholar] [CrossRef]
- Wen, X.; Lin, I. A Multi-Objective Community Detection Algorithm for Directed Network Based on Random Walk. IEEE Trans. Magn. 2019, 7, 162656–162659. [Google Scholar] [CrossRef]
- Hwang, C.-C.; Lyu, L.-Y.; Liu, C.-T.; Lun, P.-L. Optimal Design of an SPM Motor Using Genetic Algorithms and Taguchi Method. IEEE Trans. Magn. 2008, 44, 4325–4328. [Google Scholar] [CrossRef]
- Kim, W.-H.; Kim, C.-W.; Shin, H.-S.; Jeong, S.-S.; Choi, J.-Y. Optimal Design of Short-Stroke Linear Oscillating Actuator for Minimization of Side Force Using Response Surface Methodology. IEEE Trans. Magn. 2022, 58, 1–3. [Google Scholar] [CrossRef]
- Shin, K.-H.; Park, H.-Y.; Cho, H.-W.; Choi, J.-Y. Semi-Three-Dimensional Analytical Torque Calculation and Experimental Testing of an Eddy Current Brake with Permanent Magnets. IEEE TAS 2018, 28, 2–3. [Google Scholar] [CrossRef]
- Forstner, G.; Kugi, A.; Kemmetmüller, W. Magnetic Equivalent Circuit Model of a Dual Three-Phase PMSM with Winding Short Circuit. IEEE Trans. Magn. 2019, 57, 2–3. [Google Scholar]
- Duan, Y.; Harley, R.L.; Habetler, T.G. Multi-objective Design Optimization of Surface Mount Permanent Magnet Machine with Particle Swarm Intelligence. In Proceedings of the 2008 IEEE Swarm Intelligence Symposium, Saint Louis, MO, USA, 21–23 September 2008; pp. 1–3. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Slot Model FEM | MEC | Error | |
|---|---|---|---|
| Br | 1.407 [T] | 1.392 [T] | 1 [%] |
| Slotless Model FEM | Error | ||
| Br | 1.415 [T] | 1.6 [%] |
| 3D Overhang Model | 2D Equivalent Model | Unit | ||
|---|---|---|---|---|
| Br_3D | 1.2 | Br_2D | 1.267 | [T] |
| Hc_2D | −954,984 | Hc_2D | −1,008,724 | [A/m] |
| Bm_3D | 1.13T | Bm_2D | 1.19T | [T] |
| Hm_3D | −54,576 | Hm_2D | −57,648 | [A/m] |
| Parameter | Initial Model | Optimal Model | Unit |
|---|---|---|---|
| Stator outer/inner dia. | 319.4/197 | 369.2/249.4 | (mm) |
| Rotor outer/inner dia. | 196/135.8 | 248.4/184.4 | (mm) |
| Air gap | 2 | 2 | (mm) |
| Pole/Slot | 32/27 | 32/27 | − |
| PM thickness | 8 | 8 | (mm) |
| PM ratio | 0.9 | 0.73 | (%) |
| Stator/rotor stack | 120/130 | 86.4/96.4 | (mm) |
| Weight | 62.15 | 54.59 | (kg) |
| Volume | 7900 | 7000 | (m3) |
| Efficiency | 93 | 93 | (%) |
| Parameter | FEM | MEC | Unit |
|---|---|---|---|
| CPU utilization (Clock: 3.7 GHz) | 80–90 | 45–60 | (%) |
| Analysis time (Count: 4000) | 133 | 10 | (hour) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.-m.; Jung, W.-S.; Kim, W.-H.; Bang, T.-K.; Lee, D.-H.; Kim, Y.-J.; Choi, J.-Y. Optimal Design of Permanent Magnet Synchronous Machine Based on Random Walk Method and Semi 3D Magnetic Equivalent Circuit Considering Overhang Effect. Energies 2022, 15, 7852. https://doi.org/10.3390/en15217852
Kim S-m, Jung W-S, Kim W-H, Bang T-K, Lee D-H, Kim Y-J, Choi J-Y. Optimal Design of Permanent Magnet Synchronous Machine Based on Random Walk Method and Semi 3D Magnetic Equivalent Circuit Considering Overhang Effect. Energies. 2022; 15(21):7852. https://doi.org/10.3390/en15217852
Chicago/Turabian StyleKim, Su-min, Woo-Sung Jung, Woo-Hyeon Kim, Tae-Kyoung Bang, Dae-Hyun Lee, Yong-Joo Kim, and Jang-Young Choi. 2022. "Optimal Design of Permanent Magnet Synchronous Machine Based on Random Walk Method and Semi 3D Magnetic Equivalent Circuit Considering Overhang Effect" Energies 15, no. 21: 7852. https://doi.org/10.3390/en15217852
APA StyleKim, S.-m., Jung, W.-S., Kim, W.-H., Bang, T.-K., Lee, D.-H., Kim, Y.-J., & Choi, J.-Y. (2022). Optimal Design of Permanent Magnet Synchronous Machine Based on Random Walk Method and Semi 3D Magnetic Equivalent Circuit Considering Overhang Effect. Energies, 15(21), 7852. https://doi.org/10.3390/en15217852