
Overview of Consensus Protocol and Its Application to Microgrid Control

 , , ,
, , ,  , and
, and 
Abstract
1. Introduction
2. Algebraic Analysis of Multi-Agent Systems
2.1. Graph Theory
Matrix Notation
- Adjacency matrixThe adjacency matrix attributes a real and positive number if there is an edge between nodes i and j (1 for simple graphs without weights) and zero otherwise. For directed graphs, means that i receives information from j, according to (1)
- Degree matrixThe degree matrix , also called in-degree matrix in the literature, is a diagonal matrix shown in (2), which is related to the adjacency matrix
- Laplacian matrixThe Laplacian matrix is based on the adjacency and degree matrices of a graph , as in (3)
- Perron matrixThe Perron matrix related to the graph [48] is described by the expression (4), where is the identity matrix and is a small value that is discussed in detail in the stability analysis for consensus in discrete-time presented in Section 3.3.All Laplacian matrices related to the communication topologies of the example given in Figure 7, as well as the related Perron matrices considering , are computed in (5)–(7)Undirected (und):Directed and balanced (dir/bal):Directed and unbalanced (dir/unb):
2.2. Properties of Laplacian and Perron Matrices
2.2.1. Properties of the Laplacian Matrix
- The Laplacian matrices also have a left eigenvector associated with the trivial eigenvalue , as described in (9)
- Another important property of the Laplacian matrix regarding stability of the system is its sign definiteness. That condition may be verified by evaluating the relation in (11) [50]where is called positive semi-definite if or negative semi-definite if . Recall that a generic square matrix is the sum of its symmetrical and its skew parts. If the Laplacian in (11) is not symmetric, the relation may also be analysed considering just its associated symmetrical part [55]. Note that just the Laplacian matrix regarding the undirected graph of Figure 7a, , is symmetric. Its sign definiteness is verified in (12)For the sake of generality, the relation above is the same as
2.2.2. Perron Matrix
- Note in (4) that the evaluation of the Perron matrix entries depends directly on the value chosen for , which until now is only bounded to be greater than zero. The range of for which the Perron matrix is non-negative is important for the analysis of consensus problems in discrete-time, analysed in Section 3.3.
- As in the previous property, to verify if the Perron matrix is primitive, it is also necessary to know the value chosen for .
3. Consensus Protocol
3.1. Historical Context
3.2. Formulation of the Consensus Protocol—An Overview
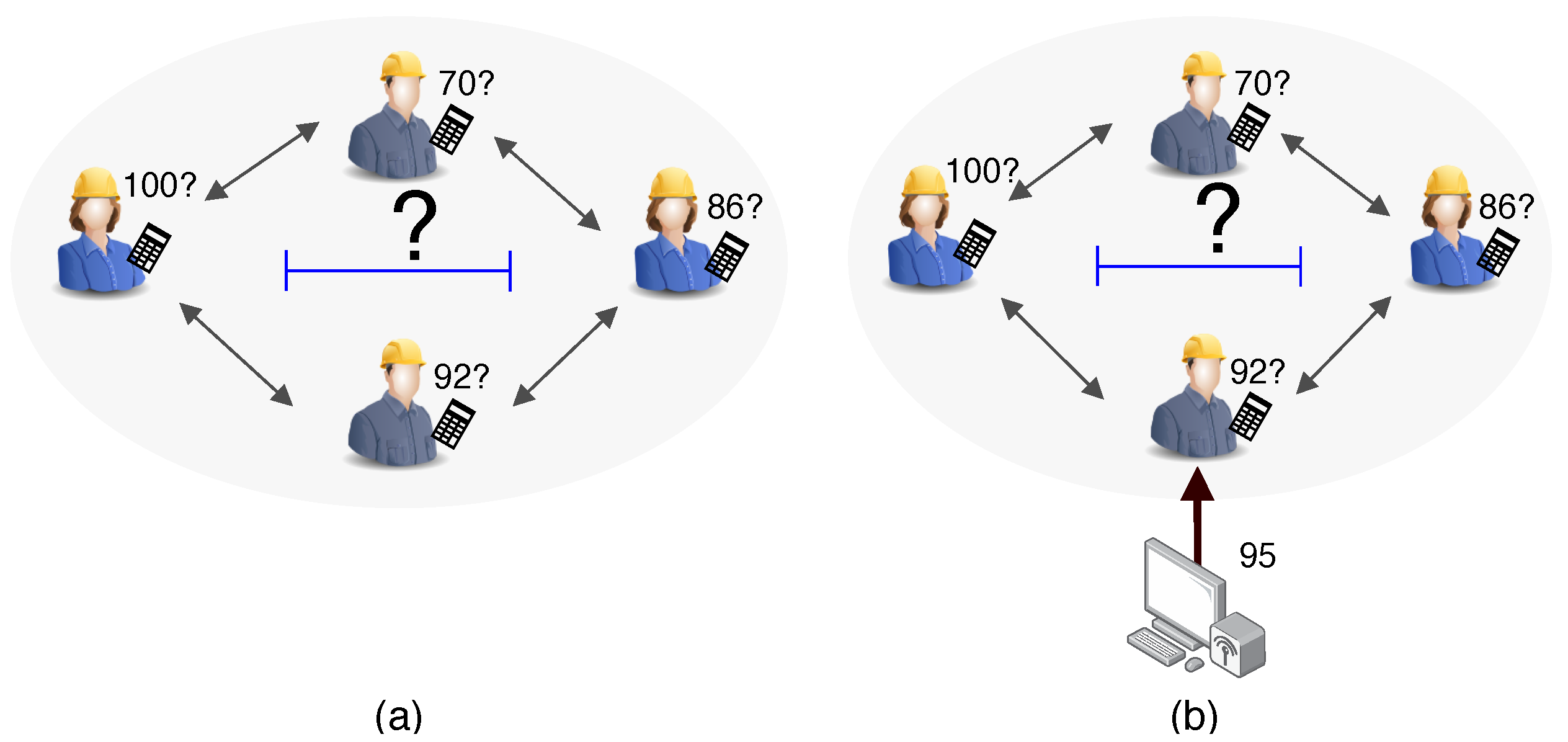
3.2.1. Leaderless Consensus Problem in Continuous-Time
3.2.2. Leader-Following Consensus Problem in Continuous-Time
3.2.3. Leaderless Consensus Problem in Discrete-Time
3.2.4. Leader-Following Consensus Problem in Discrete Time
3.3. Mathematical Proof
3.3.1. Review for the Analysis in Continuous-Time
3.3.2. Leaderless Consensus Problem in Continuous-Time
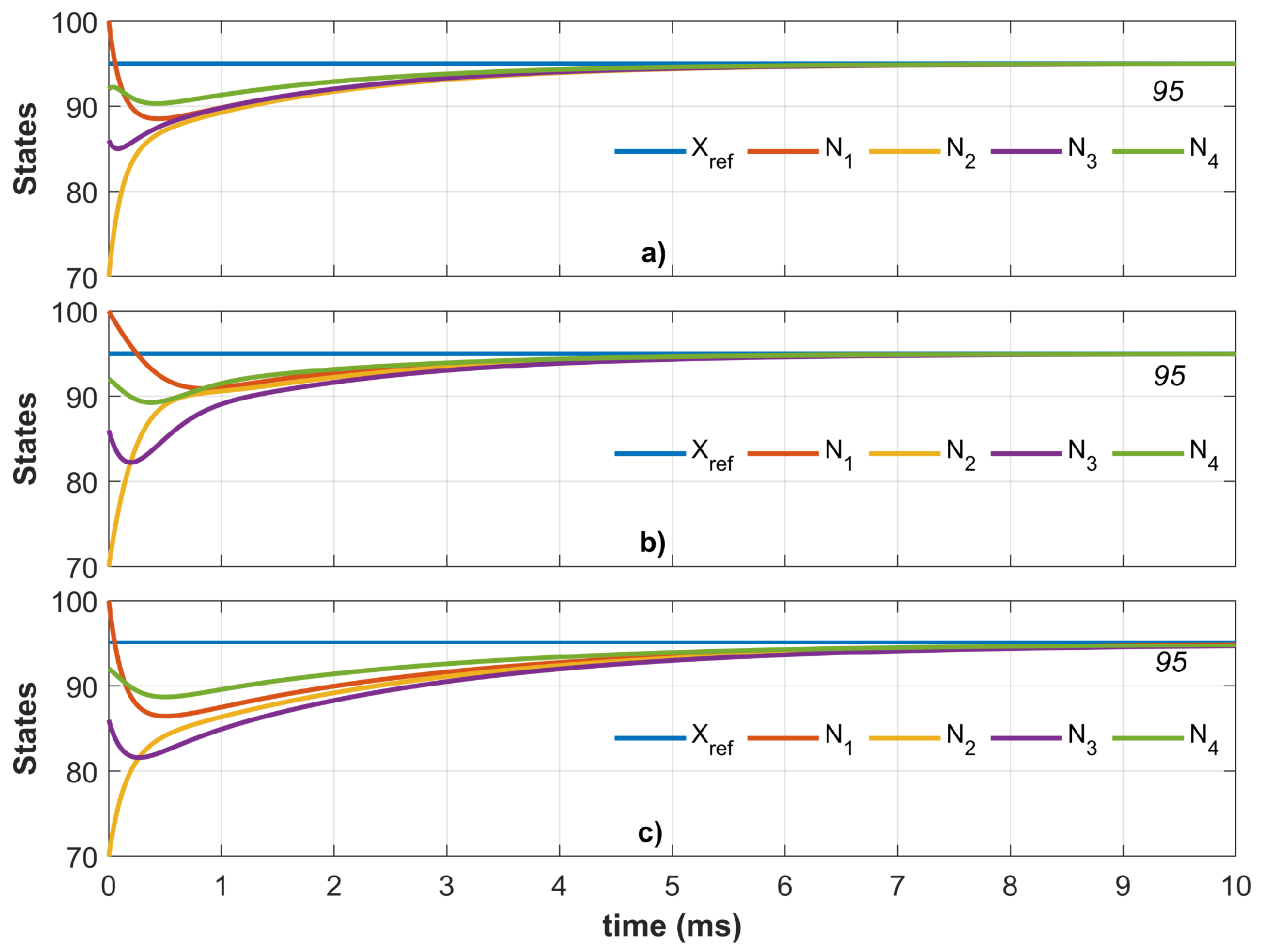
- Steady-State Analysis: to analyse the steady-state, the focus is on the equilibrium pointDue to the first property of the Laplacian () presented in (8), which holds for the three graph topologies covered herein, there is just a specific value of in which the equilibrium is achieved [39], as expressed in (36) and (37)To define the value of achieved in the convergence, let us consider the second Laplacian property discussed in Table 1which means that is an invariant quantity [39], in which the sum of the states at any time t has to be the same. Thus, as the initial states () are known, the equilibrium is found:Considering ,As summarised in Table 1, for undirected and direct balanced graphs, is an unitary vector since the sum of the columns elements of is also 0. It leads to [39] and thenwhich is the average of the agents’ initial states, as presented in (22).Note that, as expected, is not the average as the other cases, but a kind of weighted average value related to the left eigenvector, associated with the trivial eigenvalue.
- Stability Analysis: omitting t for the sake of simplicity, the consensus problem in (21) is rewritten in terms of in (41)Since (42) is quadratic and multiplied by negative sign, it complies with the third condition of the Lyapunov analysis if and only if is positive semi-definite, as shown in Table 1. Under this condition, it is ensured that the real part of eigenvalues in are non-positive for all , as desired. Due to the third property of Table 1, the stability is directly guaranteed for undirected and directed balanced graphs. However, for directed unbalanced graphs, this property has to be checked case by case, since it is not possible to generalise the positive semi-definiteness without knowing the system. As previously checked for the examples considered in Figure 7, all Laplacian matrices are positive semi-definite. Hence, according to Lyapunov theory, the three different topologies may be considered globally asymptotically stable.
3.3.3. Leader-Following Consensus Problem in Continuous-Time
- Steady-State Analysis: let us consider now (43)From the second Laplacian property (), (43) is multiplied by the Laplacian left eigenvector:For the sake of simplicity, let us consider that there is just one agent receiving the information directly from the leader, as in the example given in Figure 8. This means that just one term in the diagonal of the matrix is equal to one and the other elements are equal to zero, as in (26). Then, for undirected and directed graphs,Replacing then (44) in (43),which, due to the first Laplacian property (), leads to the same analysis as in (36) and (37). It shows that, to ensure (45), all states have to achieve the same value. If the agent associated with is equal to the value dictated by the leader node, all agents therefore have achieved the same value
- Stability Analysis: analogously to the analysis performed in Section 3.3.2, (25) is rewritten as per (46)Considering the point of interest as ,Applying the same Lyapunov function of (33), the first conditions for stability in the Lyapunov theory still hold. Thus, it is necessary to verify the expression in (35). Applying (48) and (34) in (35), one obtains:Similarly to the analysis conducted for the leaderless consensus, the stability depends on the sign definiteness of the sum . It is known that the sum of positive semi-definite matrices is a positive semi-definite matrix. is the diagonal matrix with ones and zeros; then, is positive semi-definite. Therefore, to guarantee , it is necessary to ensure that is also positive semi-definite, which leads to the same conditions already discussed for undirected, directed balanced and directed unbalanced graphs in the previous sections. Additionally, according to [68], since the row sums of the resulting matrix are no longer always zero, the trivial eigenvalue is no longer at zero. The eigenvalues of the related matrix are all greater than zero, which makes the resulting matrix not just positive semi-definite, but positive definite [68]. The formulations presented in continuous-time are summarised in Table 3.
3.3.4. Review for the Analysis in Discrete-Time
3.3.5. Leaderless Consensus Problem in Discrete-Time
- Steady-State Analysis: to analyse the steady-state conditions, it is considered that
- Stability Analysis: let us consider once more the consensus problem equated in (41), and that is approximated by (49)where and are the state at the iteration and , respectively, and is called step-size. Sinceone can rewrite (41) based on (49) and obtainwhere [48].To verify the stability according to Theorem 5, the properties summarized in Table 2 are here recalled and verified. To satisfy the Perron–Frobenius Theorem, has to be irreducible, non-negative and primitive. The Perron matrices of all graph topologies covered in this paper are irreducible, since all of them are strongly connected. To ensure that is also non-negative, the value has to be bounded, as indicated in (50)The matrix has non-negative entries, independently of the graph topology, and, consequently, since , is also a matrix with non-negative entries. Thus, the analysis is focused on the other terms of (50), asTo guarantee the second condition of Table 2, analysing element by element, it is necessary to consider the worst case condition of matrix , its maximum value, as shown in:Observe that the maximum step-sizes for the Laplacian and Perron matrices in (5)–(7) are: , , , which means that the value chosen to calculate the Perron matrices satisfies (53) for all topologies covered herein. Consequently, the Perron matrices obtained have all entries greater than zero. Just to exemplify, if is chosen for the undirected graph, the Perron matrix is no longer non-negative.Proceeding with Theorem 5, it is also necessary to ensure that is primitive (by checking if has only positive entries [73]). For the sake of simplicity, let us consider the undirected graph, with and the condition being attained.To show the relation of the property with the eigenvalues, the result obtained through Matlab is . Observe that, as expected, the eigenvalue with maximum modulus appears just once. However, whether it is chosen , exactly at the upper limit of (53), has no longer only positive entries, but also zeros. Consequently, the eigenvalues obtained are , and they do not satisfy the condition of the algebraic multiplicity equal to one for the maximum eigenvalue modulus (a single eigenvalue with maximum modulus). For this reason, the value of has to be bounded according to (54)Besides the properties already analysed, it is also necessary to ensure that the maximum modulus of the eigenvalues is equal to one, in order to guarantee that they lie inside the unit Gershgorin circle.Note that the fourth property highlighted for the Perron matrix, , gives information not only on one of the eigenvalues of the matrix, but also on its spectral radius [73]. According to Table 2, it is a characteristic of all topologies covered herein. Thus, it means that is row stochastic for all topologies, which implies that the trivial eigenvalue of the matrix is equal to one and, due to the Gershgorin circle, this is also the value of the spectral radius of the matrix. Going back to Perron–Frobenius Theorem, since the other conditions for this Theorem are already satisfied, it is known that all other eigenvalues have a smaller modulus than one.Finally, according to Theorem 5, all graph topologies covered in this paper are then stable in discrete-time as well as in continuous-time.
3.3.6. Leader-Following Consensus Problem in Discrete-Time
- Steady-State Analysis: for the steady-state analysis and the value of convergence, the relations in (55) are considered
- Stability Analysis: for the leader-following consensus problem in discrete-time considering the relation in (48), which is rewritten in discrete-time based on the approximation in (49), the following is obtained:where and . All the properties analysed for the leaderless consensus still hold for in (56). Considering that is a diagonal matrix with ones and zeros, the effect of the term on the eigenvalues of must be analysed. The expression (56) is rewritten asConsidering (57), an increase in the degree of matrix is observed, through the beta term B, according to the number of agents that receive information from the leader. Thus, the output matrix does not loose connectivity in comparison with the leaderless formulation, remaining still related to a strongly connected graph and, therefore, it is still irreducible.To ensure that is non-negative and primitive, analogously to the analysis carried out for the leaderless consensus problem in (51)–(53), the maximum value of the step-size is:which leads toThis is the same condition presented by [74] in different approaches for the purpose of stability analysis.The features analysed until now ensure that the properties of the Perron–Frobenius Theorem hold for the matrix . Now, it is necessary to evaluate if the new eigenvalues still lie inside the unit Gershgorin circle.Differently from the leaderless consensus, the fourth property of the Perron matrix is no longer valid for all rows in the matrix . However, due to the bounded value of , the is affected just on its diagonal. According to Gershgorin Theorem, this means that the term changes the centre of the Gershgorin disks related to , keeping the same radius of . For the example considered in Figure 8, the eigenvalues obtained in Matlab reinforce the features discussed . Observe that the maximum modulus of the related eigenvalues is less than one.Due to the features presented to ensure that the eigenvalues of the system are also within the unit circle, the leader-following consensus is also stable in discrete-time for all graph topologies. Different approaches for the stability analysis of leader-following consensus in discrete-time are found in [75,76]. The analysis presented for leader-following and leaderless consensus in discrete-time is summarised in Table 4.
4. Application to Microgrid Control
4.1. Features of the Microgrid
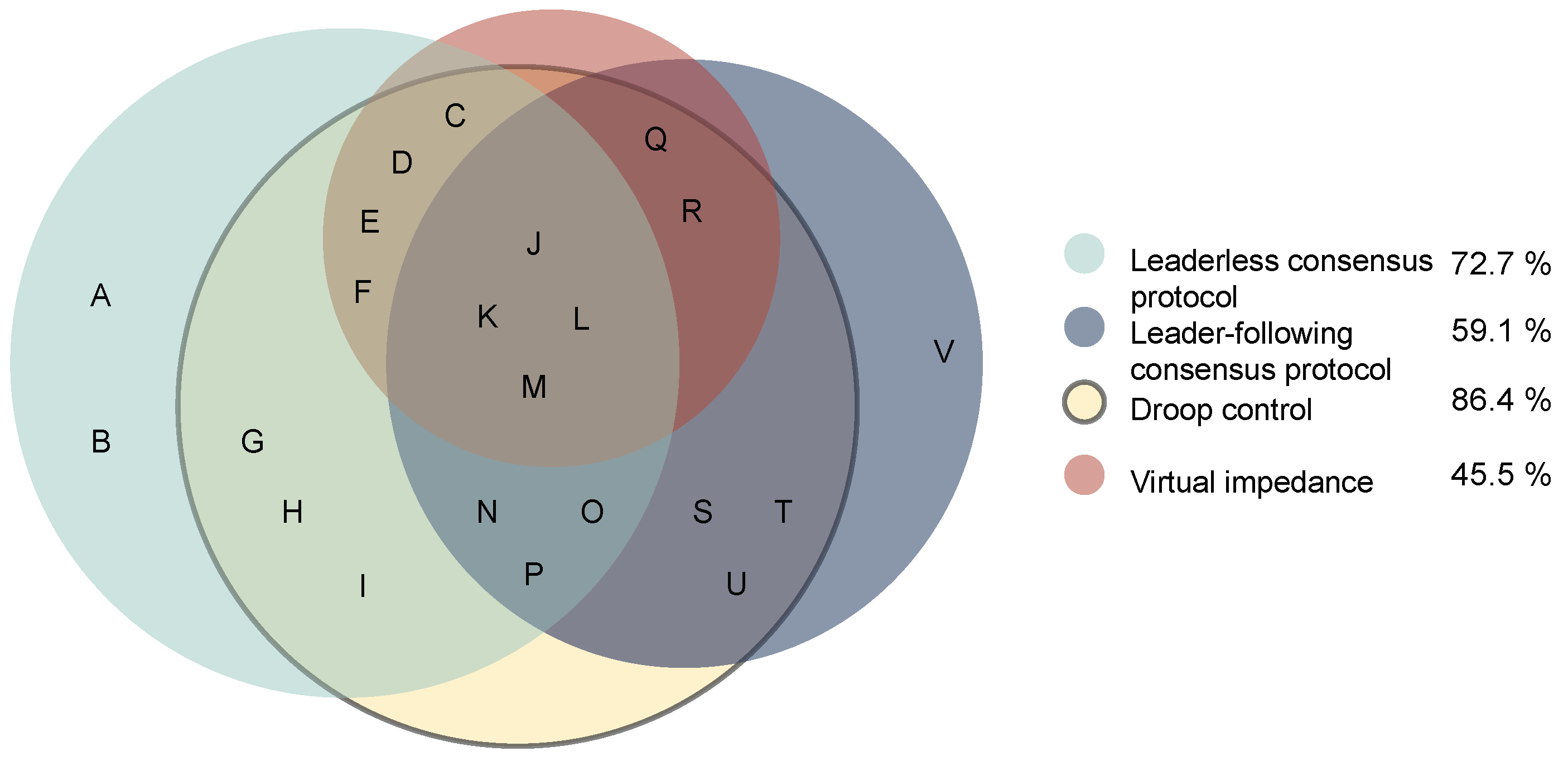
4.2. Contributions from the Literature

- if the system has at least two of the enumerated elements, the control is considered of high complexity; medium if one element is present, and low if none of the listed characteristics are observed;
- limitations regarding the reliability: the classification high is when the proposal does not present any tolerance or alternatives to deal with the conditions (1) and (2) or if the proposal depends on a specific agent or MC; medium if the strategy deals with the condition (1) or (2) or/and (3), and low if the control is able to deal with all scenarios considered and is not dependent on a leader or MC;
- the limitation to choose the communication NT is considered high in case of scenarios (1) or (2), medium if (3) and low for scenarios (4) or (5);
- the limitation for the project applicability is measured based on the diversity of elements from real applications considered in the simulations, so that the proposal is considered highly limited if only one or two of these elements are considered, medium if at least three are addressed, and low if more than three are considered in the scenarios or systems chosen. If the stability is not discussed in any scenario, the limitation is classified as high because the strategy may not be generalized.
4.3. Benefits and Challenges
4.3.1. Benefits
- Simplicity in the structure [36];
- High redundancy [36];
- High scalability [36];
- Independence of a master controller, although it could also be applied, if desired;
- Resilience in fault conditions due to the sharing of the attributions among the agents [25];
- Shorter communication NT in comparison with centralised structures;
- Deep development and maturity of the consensus technique in other areas of knowledge;
- Possibility to be applied at different control levels within the hierarchical configuration;
- Possibility to be combined with different control strategies;
- Flexibility to define the variable of interest (agent’s states).
4.3.2. Challenges
- Need of communication NT compared with fully decentralised structures [36];
- Influence of communication delays [36];
- Influence of topology changes [25].
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Adefarati, T.; Bansal, R.C. Integration of renewable distributed generators into the distribution system: A review. IET Renew. Power Gener. 2016, 10, 873–884. [Google Scholar] [CrossRef]
- Hooshyar, A.; Iravani, R. Microgrid Protection. Proc. IEEE 2017, 105, 1332–1353. [Google Scholar] [CrossRef]
- Zeng, Z.; Li, X.; Shao, W. Multi-functional grid-connected inverter: Upgrading distributed generator with ancillary services. IET Renew. Power Gener. 2018, 12, 797–805. [Google Scholar] [CrossRef]
- Bullich Massagué, E.; Díaz González, F.; Aragüés Peñalba, M.; Girbau-Llistuella, F.; Olivella Rosell, P.; Sumper, A. Microgrid clustering architectures. Appl. Energy 2018, 212, 340–361. [Google Scholar] [CrossRef]
- Hirsch, A.; Parag, Y.; Guerrero, J. Microgrids: A review of technologies, key drivers, and outstanding issues. Renew. Sustain. Energy Rev. 2018, 90, 402–411. [Google Scholar] [CrossRef]
- Madureira, A.G.; Pecas Lopes, J.A. Coordinated voltage support in distribution networks with distributed generation and microgrids. IET Renew. Power Gener. 2009, 3, 439. [Google Scholar] [CrossRef]
- Bevrani, H.; Ghosh, A.; Ledwich, G. Renewable energy sources and frequency regulation: Survey and new perspectives. IET Renew. Power Gener. 2010, 4, 438. [Google Scholar] [CrossRef]
- Lasseter, B. Microgrids [distributed power generation]. In Proceedings of the 2001 IEEE Power Engineering Society Winter Meeting, Conference Proceedings (Cat. No.01CH37194). Columbus, OH, USA, 28 January–1 February 2001; Volume 1, pp. 146–149. [Google Scholar]
- Olivares, D.E.; MehriziSani, A.; Etemadi, A.H.; Canizares, C.A.; Iravani, R.; Kazerani, M.; Hajimiragha, A.H.; Gomis-Bellmunt, O.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in Microgrid Control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodríguez, P. Control of Power Converters in AC Microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Han, Y.; Li, H.; Shen, P.; Coelho, E.A.A.; Guerrero, J.M. Review of Active and Reactive Power Sharing Strategies in Hierarchical Controlled Microgrids. IEEE Trans. Power Electron. 2017, 32, 2427–2451. [Google Scholar] [CrossRef]
- Yazdanian, M.; Mehrizi-Sani, A. Distributed Control Techniques in Microgrids. IEEE Trans. Smart Grid 2014, 5, 2901–2909. [Google Scholar] [CrossRef]
- Fagarasan, I.; Stamatescu, I.; Arghira, N.; Hossu, D.; Hossu, A.; Iliescu, S.S. Control Techniques and Strategies for Microgrids: Towards an Intelligent Control. In Proceedings of the 2017 21st International Conference on Control Systems and Computer Science (CSCS), Bucharest, Romania, 29–31 May 2017; pp. 630–635. [Google Scholar]
- Kaviri, S.M.; Pahlevani, M.; Jain, P.; Bakhshai, A. A review of AC microgrid control methods. In Proceedings of the 2017 IEEE 8th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Florianópolis, Brazil, 17–20 April 2017; pp. 1–8. [Google Scholar]
- Morstyn, T.; Hredzak, B.; Agelidis, V.G. Control Strategies for Microgrids with Distributed Energy Storage Systems: An Overview. IEEE Trans. Smart Grid 2018, 9, 3652–3666. [Google Scholar] [CrossRef]
- Bracale, A.; Angelino, R.; Carpinelli, G.; Mangoni, M.; Proto, D. Dispersed generation units providing system ancillary services in distribution networks by a centralised control. IET Renew. Power Gener. 2011, 5, 311. [Google Scholar] [CrossRef]
- Li, Y.W.; Kao, C.-N. An Accurate Power Control Strategy for Power-Electronics-Interfaced Distributed Generation Units Operating in a Low-Voltage Multibus Microgrid. IEEE Trans. Power Electron. 2009, 24, 2977–2988. [Google Scholar]
- Wang, X.; Zhang, H.; Li, C. Distributed finite-time cooperative control of droop-controlled microgrids under switching topology. IET Renew. Power Gener. 2017, 11, 707–714. [Google Scholar] [CrossRef]
- Chen, L.; Wang, Y.; Zheng, T.; Sun, Z. Consensus-Based Distributed Control with Communication Time Delays for Virtual Synchronous Generators in Isolate Microgrid. Energy Power Eng. 2017, 9, 102–111. [Google Scholar] [CrossRef]
- Dou, C.; Zhang, B.; Yue, D.; Zhang, Z.; Xu, S.; Hayat, T.; Alsaedi, A. A novel hierarchical control strategy combined with sliding mode control and consensus control for islanded micro-grid. IET Renew. Power Gener. 2018, 12, 1012–1024. [Google Scholar] [CrossRef]
- OlfatiSaber, R.; Murray, R.M. Consensus Problems in Networks of Agents with Switching Topology and Time-Delays. IEEE Trans. Autom. Control. 2004, 49, 1520–1533. [Google Scholar] [CrossRef]
- Olfati, R.; Richard, S. Consensus Protocols for Networks of Dynamic Agents. In Proceedings of the American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 951–956. [Google Scholar]
- Huang, N.; Duan, Z.; Zhao, Y. Leader-following consensus of second-order nonlinear multi-agent systems with directed intermittent communication. IET Control. Theory Appl. 2014, 8, 782–795. [Google Scholar] [CrossRef]
- Shang, Y. Fixed-time group consensus for multi-agent systems with nonlinear dynamics and uncertainties. IET Control Theory Appl. 2018, 12, 395–404. [Google Scholar] [CrossRef]
- Savino, H.J. New Methods for Consensus in Multiagent Systems; Universidade Federal de Minas Gerais: Belo Horizonte, Brazil, 2016. [Google Scholar]
- He, W.; Cao, J. Consensus control for high-order multi-agent systems. IET Control Theory Appl. 2011, 5, 231–238. [Google Scholar] [CrossRef]
- Jiang, X.; Xia, G.; Feng, Z. Output consensus of high-order linear multiagent systems with time-varying delays. IET Control Theory Appl. 2019, 13, 1084–1094. [Google Scholar] [CrossRef]
- Hu, J.; Lin, Y.S. Consensus control for multi-agent systems with double-integrator dynamics and time delays. IET Control Theory Appl. 2010, 4, 109–118. [Google Scholar] [CrossRef]
- Lin, P.; Li, Z.; Jia, Y.; Sun, M. High-order multi-agent consensus with dynamically changing topologies and time-delays. IET Control Theory Appl. 2011, 5, 976–981. [Google Scholar] [CrossRef]
- Li, Z. Distributed robust consensus of linear multi-agent systems with switching topologies. J. Eng. 2015, 2015, 17–24. [Google Scholar] [CrossRef]
- Ding, C.; Dong, X.; Shi, C.; Chen, Y.; Liu, Z. Leaderless output consensus of multi-agent systems with distinct relative degrees under switching directed topologies. IET Control Theory Appl. 2019, 13, 313–320. [Google Scholar] [CrossRef]
- Savino, H.J.; DosSantos, C.R.P.; Souza, F.O.; Pimenta, L.C.A.; DeOliveira, M.; Palhares, R.M. Conditions for Consensus of Multi-Agent Systems with Time-Delays and Uncertain Switching Topology. IEEE Trans. Ind. Electron. 2016, 63, 1258–1267. [Google Scholar] [CrossRef]
- Mc Namara, P.; Negenborn, R.R.; De Schutter, B.; Lightbody, G. Optimal Coordination of a Multiple HVDC Link System Using Centralized and Distributed Control. IEEE Trans. Control Syst. Technol. 2013, 21, 302–314. [Google Scholar] [CrossRef]
- Rahman, M.S.; Maung Than, O.A. Distributed Agent-Based Coordinated Control for Microgrid Management. In Sustainable Development in Energy Systems; Azzopardi, B., Ed.; Springer International Publishing: Cham, Switzerland, 2017; pp. vii–ix. [Google Scholar]
- Wooldridge, M.; Jennings, N.R. Intelligent agents: Theory and practice. Knowl. Eng. Rev. 1995, 10, 115–152. [Google Scholar] [CrossRef]
- Han, Y.; Zhang, K.; Li, H.; Coelho, E.A.A.; Guerrero, J.M. MAS-Based Distributed Coordinated Control and Optimization in Microgrid and Microgrid Clusters: A Comprehensive Overview. IEEE Trans. Power Electron. 2018, 33, 6488–6508. [Google Scholar] [CrossRef]
- Cao, Y.; Yu, W.; Ren, W.; Chen, G. An Overview of Recent Progress in the Study of Distributed Multi-Agent Coordination. IEEE Trans. Ind. Inf. 2013, 9, 427–438. [Google Scholar] [CrossRef]
- Ordoñez, B. Estratégia de Controle Cooperativo Baseado em Consenso Para um Grupo Multi-veículos; Universidade Federal de Santa Catarina: Florianópolis, Brazil, 2013. [Google Scholar]
- OlfatiSaber, R.; Fax, J.A.; Murray, R.M. Consensus and Cooperation in Networked Multi-Agent Systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef]
- Gross, J.L.; Yellen, J. Handbook of Graph Theory; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Nica, B. A brief introduction to Spectral Graph Theory. arXiv 2016, arXiv:1609.08072. [Google Scholar]
- Fax, J.A.; Murray, R.M. Graph Laplacians and Stabilization of Vehicle Formations. IFAC Proc. Vol. 2002, 35, 55–60. [Google Scholar] [CrossRef]
- Jadbabaie, A.; Lin, J.; Morse, A.S. Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Trans. Autom. Control. 2003, 48, 988–1001. [Google Scholar] [CrossRef]
- Vicsek, T.; Czirók, A.; BenJacob, E.; Cohen, I.; Shochet, O. Novel Type of Phase Transition in a System of Self-Driven Particles. Phys. Rev. Lett. 1995, 75, 1226–1229. [Google Scholar] [CrossRef]
- Godsil, C.; Royle, G. Algebraic Graph Theory, Volume 207 of Graduate Texts in Mathematics; Springer: New York, NY, USA, 2001. [Google Scholar]
- Rosen, K.H. Handbook of Discrete and Combinatorial Mathematics, 2nd ed.; Chapman & Hall/CRC: Boca Raton, FL, USA, 2018. [Google Scholar]
- Thulasiraman, K.K.; Arumugam, S.; Brstädt, A.; Nishizeki, T. Handbook of Graph Theory, Combinatorial Optimization, and Algorithms; Chapman & Hall/CRC: Boca Raton, FL, USA, 2016. [Google Scholar]
- Lewis, F.L.; Zhang, H.; Hengster, M.K.; Das, A. Cooperative Control of Multi-Agent Systems, Volume 9 of Communications and Control Engineering; Springer: London, UK, 2014. [Google Scholar]
- Chen, C.T. Linear System Theory and Design, 3rd ed.; Oxford University Press: New York, NY, USA, 1999. [Google Scholar]
- Hespanha, J.P. Linear Systems Theory; Princeton University Press: Princeton, NJ, USA, 2009. [Google Scholar]
- Varga, R.S. Gersgorin and His Circles, Volume 8 of Springer Series in Computational Mathematics; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Bapat, R.B.; Raghavan, T.E.S. Perron–Frobenius Theory and Matrix Games; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Serre, D. Matrices Theory and Applications, Volume 216 of Graduate Texts in Mathematics; Springer: New York, NY, USA, 2010. [Google Scholar]
- Mazumder, S.K. Wireless Networking Based Control, 1st ed.; Mazumder, S.K., Ed.; Springer: New York, NY, USA, 2011. [Google Scholar]
- Quarteroni, A.; Sacco, R.; Saleri, F. Numerical Mathematics Texts in Applied Mathematics; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Bai, H.; Arcak, M.; Wen, J. Cooperative Control Design. A systematic, Passivity-Based Approach, Volume 89 of Communications and Control Engineering; Springer: New York, NY, USA, 2011. [Google Scholar]
- Qu, Z. Cooperative Control of Dynamical Systems. Applications to Autonomous Vehicles; Springer: London, UK, 2009. [Google Scholar]
- Degroot, M.H. Reaching a Consensus. J. Am. Stat. Assoc. 1974, 69, 118–121. [Google Scholar] [CrossRef]
- Fuad, S.A. Consensus Based Distributed Control in Micro-Grid Clusters; Michigan Technological University: Houghton, MI, USA, 2017. [Google Scholar]
- Tsitsiklis, J.N. Problems in Decentralized Decision Making and Computation; Massachusetts Institute of Technology: Cambridge, MA, USA, 1984. [Google Scholar]
- Junior, C.R.P.d.S. Uma Abordagem LMI para Análise do Consenso em Sistemas Multi-Agentes Sujeitos a Atrasos no Tempo e Topologia Variável; Universidade Federal de Minas Gerais: Belo Horizonte, Brazil, 2014. [Google Scholar]
- Ren, W.; Beard, R.W. Distributed Consensus in Multi-vehicle Cooperative Control. In Communications and Control Engineering; Springer: London, UK, 2008. [Google Scholar]
- Yu, L.; Shi, D.; Xu, G.; Guo, X.; Jiang, Z.; Jing, C. Consensus Control of Distributed Energy Resources in a Multi-Bus Microgrid for Reactive Power Sharing and Voltage Control. Energies 2018, 11, 2710. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R.W.; Atkins, E.M. Information consensus in multivehicle cooperative control. IEEE Control Syst. 2007, 27, 71–82. [Google Scholar]
- Jalili, M. A simple consensus algorithm for distributed averaging in random geographical networks. Pramana J. Phys. 2012, 79, 493–499. [Google Scholar] [CrossRef]
- Gajic, Z.; Qureshi, M.T.J. Introduction. In Lyapunov Matrix Equation in System Stability and Control; Columbia University Press: New York, NY, USA, 1990; Volume 35, pp. 1–12. [Google Scholar]
- Khalil, H.K. Nonlinear Systems; Prentice Hall: Hoboken, NI, USA, 2002. [Google Scholar]
- Zhang, X.; Huang, Y.; Li, L.; Yeh, W.C. Power and capacity consensus tracking of distributed battery storage systems in modular microgrids. Energies 2018, 11, 1439. [Google Scholar] [CrossRef]
- Marsli, R.; Hall, F.J. On the location of eigenvalues of real matrices. Electron. J. Linear Algebra 2017, 32, 357–364. [Google Scholar] [CrossRef]
- Slučiak, O. Convergence Analysis of Distributed Consensus Algorithms; Technischen Universität Wien: Vienna, Austria, 2013. [Google Scholar]
- Fax, J.A.; Murray, R.M. Information Flow and Cooperative Control of Vehicle Formations. IEEE Trans. Autom. Control 2004, 49, 1465–1476. [Google Scholar] [CrossRef]
- Loebl, M.; Nešetřil, J.; Editors, R.T. A Journey Through Discrete Mathematics; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Horn, R.A.; Johnson, C.R. Matrix Analysis; Cambridge University Press: Cambridge, UK, 1985. [Google Scholar]
- Zheng, Y.; Li, S.; Tan, R. Distributed Model Predictive Control for On-Connected Microgrid Power Management. IEEE Trans. Control Syst. Technol. 2018, 26, 1028–1039. [Google Scholar] [CrossRef]
- Sodsee, S.; Komkhao, M.; Li, Z. On the Convergence of a Leader-Following Discrete-Time Consensus Protocol. IICS Int. Workshop Innov. Internet Comput. Syst. 2010, 165, 278–285. [Google Scholar]
- Huang, T.; Jiancheng, L.; Sun, C.; Tuzikov, A.V. Advances in Neural Networks—ISNN 2018; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Malek, S.; Gholipour, M. Robust scheme for voltage regulation and power sharing among DERs in DC microgrids. IET Renew. Power Gener. 2020, 14, 647–657. [Google Scholar] [CrossRef]
- Duan, J.; Wang, C.; Xu, H.; Liu, W.; Xue, Y.; Peng, J.C.; Jiang, H. Distributed Control of Inverter-Interfaced Microgrids Based on Consensus Algorithm With Improved Transient Performance. IEEE Trans. Smart Grid 2019, 10, 1303–1312. [Google Scholar] [CrossRef]
- Yoo, H.J.; Nguyen, T.T.; Kim, H.M. Consensus-Based Distributed Coordination Control of Hybrid AC/DC Microgrids. IEEE Trans. Sustain. Energy 2020, 11, 629–639. [Google Scholar] [CrossRef]
- Lewis, F.L.; Qu, Z.; Davoudi, A.; Bidram, A. Secondary control of microgrids based on distributed cooperative control of multi-agent systems. IET Gener. Transm. Distrib. 2013, 7, 822–831. [Google Scholar]
- Yuan, L.; Meng, K.; Dong, Z.Y. Hierarchical control scheme for coordinated reactive power regulation in clustered wind farms. IET Renew. Power Gener. 2018, 12, 1119–1126. [Google Scholar] [CrossRef]
- Wang, D.; Meng, K.; Luo, F.; Coates, C.; Gao, X.; Dong, Z.Y. Coordinated dispatch of networked energy storage systems for loading management in active distribution networks. IET Renew. Power Gener. 2016, 10, 1374–1381. [Google Scholar] [CrossRef]
- SimpsonPorco, J.W.; Shafiee, Q.; Dorfler, F.; Vasquez, J.C.; Guerrero, J.M.; Bullo, F. Secondary Frequency and Voltage Control of Islanded Microgrids via Distributed Averaging. IEEE Trans. Ind. Electron. 2015, 62, 7025–7038. [Google Scholar] [CrossRef]
- Schiffer, J.; Seel, T.; Raisch, J.; Sezi, T. Voltage Stability and Reactive Power Sharing in Inverter-Based Microgrids With Consensus-Based Distributed Voltage Control. IEEE Trans. Control Syst. Technol. 2016, 24, 96–109. [Google Scholar] [CrossRef]
- Parada Contzen, M. Analysis of consensus in hardware interconnected networks: An application to inverter-based AC microgrids. Eur. J. Control 2019, 46, 80–89. [Google Scholar] [CrossRef]
- Bidram, A.; Davoudi, A.; Lewis, F.L.; Guerrero, J.M. Distributed Cooperative Secondary Control of Microgrids Using Feedback Linearization. IEEE Trans. Power Syst. 2013, 28, 3462–3470. [Google Scholar] [CrossRef]
- Ma, J.; Ma, X.; Ilic, S. HVAC-based cooperative algorithms for demand side management in a microgrid. Energies 2019, 12, 4276. [Google Scholar] [CrossRef]
- Cai, H.; Hu, G. Consensus-based distributed nonlinear hierarchical control of AC microgrid under switching communication network. In Proceedings of the IEEE International Conference on Control and Automation, ICCA, Kathmandu, Nepal, 1–3 June 2016; pp. 571–576. [Google Scholar]
- Tavassoli, B.; Fereidunian, A.; Mehdi, S. Communication system effects on the secondary control performance in microgrids. IET Renew. Power Gener. 2020, 14, 2047–2057. [Google Scholar] [CrossRef]
- Yu, M.; Song, C.; Feng, S.; Tan, W. A consensus approach for economic dispatch problem in a microgrid with random delay effects. Int. J. Electr. Power Energy Syst. 2020, 118, 105794. [Google Scholar] [CrossRef]
- Cai, P.; Wen, C.; Song, C. Consensus-Based Secondary Frequency Control for Islanded Microgrid with Communication Delays. In Proceedings of the ICCAIS 2018—7th International Conference on Control, Automation and Information Sciences, Hangzhou, China, 24–27 October 2018; pp. 107–112. [Google Scholar]
- Wang, D.; Yu, M. Leader-following consensus for heterogeneous multi-agent systems with bounded communication delays. In Proceedings of the 14th International Conference on Control, Automation, Robotics and Vision, ICARCV 2016, Phuket, Thailand, 13–15 November 2016; pp. 1–6. [Google Scholar]
- Majumder, R.; Ghosh, A.; Ledwich, G.; Zare, F. Load sharing and power quality enhanced operation of a distributed microgrid. IET Renew. Power Gener. 2009, 3, 109. [Google Scholar] [CrossRef]
- Zhou, J.; Kim, S.; Zhang, H.; Sun, Q.; Han, R. Consensus-Based Distributed Control for Accurate Reactive, Harmonic, and Imbalance Power Sharing in Microgrids. IEEE Trans. Smart Grid 2018, 9, 2453–2467. [Google Scholar] [CrossRef]
- Chen, L.; Wang, Y.; Yang, L.; Si, Y.; Chen, T.; Mei, S. Consensus control strategy with state predictor for virtual synchronous generators in isolated microgrid. In Proceedings of the 2016 IEEE International Conference on Power System Technology (POWERCON), Wollongong, NSW, Australia, 28 September–1 October 2016; pp. 1–5. [Google Scholar]
- Wu, X.; Shen, C.; Iravani, R. A Distributed, Cooperative Frequency and Voltage Control for Microgrids. IEEE Trans. Smart Grid 2018, 9, 2764–2776. [Google Scholar] [CrossRef]
- Han, R.; Meng, L.; Trecate, G.F.; Coelho, E.A.A.; Vasquez, J.C.; Guerrero, J.M. Containment and consensus-based distributed coordination control for voltage bound and reactive power sharing in AC microgrid. In Proceedings of the 2017 IEEE Applied Power Electronics Conference and Exposition (APEC), Tampa, FL, USA, 26–30 March 2017; pp. 3549–3556. [Google Scholar]
- He, H.; Han, B.; Li, G.; Wang, K.; Liu, S. A novel control method based on consensus algorithm for microgrids. In Proceedings of the 2017 IEEE 3rd International Future Energy Electronics Conference and ECCE Asia (IFEEC 2017—ECCE Asia, Kaohsiung, Taiwan, 3–7 June 2017; pp. 2203–2207. [Google Scholar]
- Chen, L.; Wang, Y.; Lu, X.; Zheng, T.; Wang, J.; Mei, S. Resilient Active Power Sharing in Autonomous Microgrids Using Pinning-Consensus-Based Distributed Control. IEEE Trans. Smart Grid 2019, 10, 6802–6811. [Google Scholar] [CrossRef]
- Vergara, P.P.; Rey, J.M.; Shaker, H.R.; Guerrero, J.M.; Jorgensen, B.N.; da Silva, L.C.P. Distributed Strategy for Optimal Dispatch of Unbalanced Three-Phase Islanded Microgrids. IEEE Trans. Smart Grid 2019, 10, 3210–3225. [Google Scholar] [CrossRef]
- Yan, Y.; Shi, D.; Bian, D.; Huang, B.; Yi, Z.; Wang, Z. Small-signal Stability Analysis and Performance Evaluation of Microgrids under Distributed Control. IEEE Trans. Smart Grid 2018, 10, 4848–4858. [Google Scholar] [CrossRef]
- Shah, S.; Sun, H.; Nikovski, D.; Zhang, J. Consensus-based Synchronization of Microgrids at Multiple Points of Interconnection. In Proceedings of the 2018 IEEE Power & Energy Society General Meeting (PESGM), Portland, OR, USA, 5–9 August 2018; Volume 2018, pp. 1–5. [Google Scholar]
- Carvalho, H.T.d.M. Controle de Microrredes CA: Estudo da Regulação de Frequência e Tensões; Universidade Federal de Uberlândia: Uberlândia, Brazil, 2019. [Google Scholar]
- Shahab, M.A.; Mozafari, S.B.; Soleymani, S.; Mahdian, N.; Mohammadnezhad, H.; Guerrero, J.M. Stochastic Consensus-based Control of μGs with Communication Delays and Noises. IEEE Trans. Power Syst. 2019, 34, 3573–3581. [Google Scholar] [CrossRef]
- Chen, J.; Yan, S.; Yang, T.; Tan, S.C.; Hui, S.Y. Practical Evaluation of Droop and Consensus Control of Distributed Electric Springs for Both Voltage and Frequency Regulation in Microgrid. IEEE Trans. Power Electron. 2019, 34, 6947–6959. [Google Scholar] [CrossRef]
- Huang, C.; Weng, S.; Yue, D.; Deng, S.; Xie, J.; Ge, H. Distributed cooperative control of energy storage units in microgrid based on multi-agent consensus method. Electr. Power Syst. Res. 2017, 147, 213–223. [Google Scholar] [CrossRef]
- Liu, W.; Gu, W.; Xu, Y.; Xue, S.; Chen, M.; Zhao, B.; Fan, M. Improved average consensus algorithm based distributed cost optimization for loading shedding of autonomous microgrids. Int. J. Electr. Power Energy Syst. 2015, 73, 89–96. [Google Scholar] [CrossRef]
- Dou, C.; Li, Y.; Yue, D.; Zhang, Z.; Zhang, B. Distributed cooperative control method based on network topology optimisation in microgrid cluster. IET Renew. Power Gener. 2020, 14, 939–947. [Google Scholar] [CrossRef]
- Espina, E.; Cardenas-Dobson, R.; Simpson-Porco, J.W.; Saez, D.; Kazerani, M. A Consensus-Based Secondary Control Strategy for Hybrid AC/DC Microgrids With Experimental Validation. IEEE Trans. Power Electron. 2021, 36, 5971–5984. [Google Scholar] [CrossRef]
- Zhou, J.; Xu, Y.; Sun, H.; Li, Y.; Chow, M.-Y. Distributed Power Management for Networked AC–DC Microgrids With Unbalanced Microgrids. IEEE Trans. Ind. Inf. 2020, 16, 1655–1667. [Google Scholar] [CrossRef]
- Pham, M.D.; Lee, H.H. Consensus-based distributed control scheme for PCC voltage harmonic mitigation and enhanced power sharing in islanded microgrids. IET Gener. Transm. Distrib. 2021, 15, 2659–2672. [Google Scholar] [CrossRef]
- Burgos-Mellado, C.; Llanos, J.J.; Cardenas, R.; Saez, D.; Olivares, D.E.; Sumner, M.; Costabeber, A. Distributed Control Strategy Based on a Consensus Algorithm and on the Conservative Power Theory for Imbalance and Harmonic Sharing in 4-Wire Microgrids. IEEE Trans. Smart Grid 2020, 11, 1604–1619. [Google Scholar] [CrossRef]
- Xu, T.; Zhou, J.; Liang, L.; Wu, Y.; Cai, S.; Liu, Z.; Li, P.; Yu, L. Consensus active power sharing for islanded microgrids based on distributed angle droop control. IET Renew. Power Gener. 2021, 15, 2826–2839. [Google Scholar] [CrossRef]
- Zhou, J.; Xu, Y.; Sun, H.; Wang, L.; Chow, M.-Y. Distributed Event-Triggered H∞ Consensus Based Current Sharing Control of DC Microgrids Considering Uncertainties. IEEE Trans. Ind. Inf. 2019, 16, 7413–7425. [Google Scholar] [CrossRef]
- Keshavarz, M.; Doroudi, A.; Kazemi, M.H.; Dehkordi, M.N. A New Consensus-based Distributed Adaptive Control for Islanded Microgrids. Int. J. Eng. 2021, 34, 1725–1735. [Google Scholar]
- Wei, J.; Roche, R.; Koukam, A.; Lauri, F. Agent and Consensus Approaches to Microgrid Coordination for Resilience Improvement. In Proceedings of the 9th International Conference on Management of Digital EcoSystems—MEDES ’17, Bangkok, Thailand, 7–10 November 2017; ACM Press: New York, NY, USA, 2017; pp. 28–34. [Google Scholar]
- Burgos-Mellado, C.; Llanos, J.; Espina, E.; Sez, D.; Crdenas, R.; Sumner, M.; Watson, A. Single-phase consensus-based control for regulating voltage and sharing unbalanced currents in 3-wire isolated AC microgrids. IEEE Access 2020, 8, 164882–164898. [Google Scholar] [CrossRef]
- Hou, X.; Sun, Y.; Lu, J.; Zhang, X.; Koh, L.H.; Su, M.; Guerrero, J.M. Distributed hierarchical control of AC microgrid operating in grid-connected, islanded and their transition modes. IEEE Access 2018, 6, 77388–77401. [Google Scholar] [CrossRef]
- Ullah, S.; Khan, L.; Sami, I.; Ullah, N. Consensus-Based Delay-Tolerant Distributed Secondary Control Strategy for Droop Controlled AC Microgrids. IEEE Access 2021, 9, 6033–6049. [Google Scholar] [CrossRef]
- Tao, Y.; Lu, N. A distributed control strategy of microgrid based on multi-agent consensus algorithm. J. Comput. Methods Sci. Eng. 2020, 20, 785–806. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | Undirected | Directed Balanced | Directed Unbalanced |
|---|---|---|---|
| 1. Row sum = 0 | yes | yes | yes |
| 2. Column sum = 0 | yes | yes | no (but, ) |
| 3. Positive semidefinite | yes | yes | ? (has to be verified) |
| Features | Undirected | Directed Balanced | Directed Unbalanced |
|---|---|---|---|
| 1. Irreducible if SCG | yes (SCG) | yes (SCG) | yes (SCG) |
| 2. Non-negative | ? () | ? () | ? () |
| 3. Primitive | ? () | ? () | ? () |
| 4. Row stochastic (Row sum = 1) | yes | yes | yes |
| Problem | Formulation | Undirected | Directed Balanced | Directed Unbalanced |
|---|---|---|---|---|
| leaderless | ||||
| leader-following |
| Problem | Formulation | Undirected | Directed Balanced | Directed Unbalanced |
|---|---|---|---|---|
| leaderless | ||||
| leader-following | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ferreira, D.; Silva, S.; Silva, W.; Brandao, D.; Bergna, G.; Tedeschi, E. Overview of Consensus Protocol and Its Application to Microgrid Control. Energies 2022, 15, 8536. https://doi.org/10.3390/en15228536
Ferreira D, Silva S, Silva W, Brandao D, Bergna G, Tedeschi E. Overview of Consensus Protocol and Its Application to Microgrid Control. Energies. 2022; 15(22):8536. https://doi.org/10.3390/en15228536
Chicago/Turabian StyleFerreira, Daniele, Sidelmo Silva, Waner Silva, Danilo Brandao, Gilbert Bergna, and Elisabetta Tedeschi. 2022. "Overview of Consensus Protocol and Its Application to Microgrid Control" Energies 15, no. 22: 8536. https://doi.org/10.3390/en15228536
APA StyleFerreira, D., Silva, S., Silva, W., Brandao, D., Bergna, G., & Tedeschi, E. (2022). Overview of Consensus Protocol and Its Application to Microgrid Control. Energies, 15(22), 8536. https://doi.org/10.3390/en15228536