1. Introduction
Considering the depletion of fossil fuels, the role of renewable energy sources is now seen as vital in shaping a more sustainable future. Photovoltaic (PV) energy has attracted considerable attention from both researchers and the industry as an alternative to the conventional fossil fuel-based electricity generation, due to lower manufacturing costs and higher efficiency [
1,
2]. High-efficiency operation is the major concern regarding the PV system, as energy generated from the PV array should always operate at optimum power in any conditions. The ability to harvest the full amount of energy would help to maximize the return of investment of PV installation [
3].
However, the challenge lies in the non-linear characteristics of PV, where the performance depends on the dynamic environmental conditions, i.e., irradiance and temperature. Consequently, the optimum power of the PV system should be extracted with the use of a power electronics converter [
4,
5]. In response to this, a dc-dc converter is integrated with a maximum power point tracking (MPPT) control to harvest the PV optimum power. As a result, various studies based on maximum power point tracking (MPPT) algorithms have been carried out [
6,
7]. The most popular techniques, such as perturb and observe (P&O) [
8,
9,
10] and incremental conductance (IC) [
11], are widely used in academia and practical applications [
12].
Generally, the shading phenomenon is unavoidable in PV generation [
10,
13]. The shadows of buildings, trees, and clouds lead to a non-uniform irradiance penetrating the PV array [
13,
14]. Once partial shading occurs, the conventional MPPT control is unable to distinguish the accurate operating point of the PV system [
11,
13,
15]. This idea has gained significant interest in addressing the these disadvantages. The implementation of the hardware method, which increases the complexity and cost of the PV installation, is also explored, but will not be discussed here [
1,
16]. The antiparallel bypass diode method is, therefore, the simplest solution to prevent the creation of a hot spot due to reverse currents flowing through the cell. This happens once the serially connected cell is in a reversed biased state that may cause heat dissipation in the cell. Dissipated heat can become severe if it is higher than the cell’s maximum power, potentially destroying the cell and causing the device to have an open circuit. Furthermore, the presence of the antiparallel diode creates multiple peaks in the P-V and I-V curves, where the global maximum power point (GMPP) is the highest peak [
11]. The rests of the peak are known as the local maximum power point (LMPP) [
1,
17].
Recently, studies have addressed the problem of partial shading conditions (PSC) in the PV system. Conventional MPPT techniques, such as perturb and observe (P&O) [
8,
18] and incremental conductance (IC) [
19], fail to search for the optimum point [
16,
20]. In the conventional method, the decision is made based on the gradient of the curve. It uses a fixed step size in the search with an easier climbing process towards the optimum point. A larger step size leads to a faster time to reach the optimum point, but comes with a high probability of overlooking the optimum point. Meanwhile, a small step size in the execution leads to a longer time to reach the optimum point, with lower chances to overlook the optimum point. In the conventional method, the next movement is based on the previous location, and no memory is employed; thus this method fails to identify the optimum point under shading conditions [
20,
21]. Therefore, soft computing techniques using particle swarm optimization (PSO) [
17,
18], cuckoo search [
22] differential evaluation (DE) [
23,
24], fuzzy logic control [
25], ant colony optimization (ACO) [
26], artificial bee colony (ABC) [
21,
27], musical chairs algorithm [
28], salp swarm algorithm (SSA) [
29,
30,
31], horse herd optimization algorithm [
13], and the grasshopper optimization algorithm (GOA) [
32] are used in the search for the global point. These techniques are more preferable due to their superiority in handling extreme conditions, such as shading and the dynamic change of irradiance [
33]. However, the challenge is to choose the right parameters, including initial state, control parameters, population sizes, and the acceptable search space [
34]. Mainly, the improper selection of the initial condition causes the convergence to fail at a certain value of power [
27,
34].
For example, the PSO algorithm, in which this method has intermittent performance under the shading condition. In PSO, the randomness selections of the initial value reduce the efficiency of searching significantly [
35,
36]. The small perturbation during the exploration process may lead to failure as the operating point is too far from the optimum value. Consequently, more iteration is required for the particle to reach the optimum point. On the other hand, if the perturbation is set too large, it might cause the search to overlook the optimum point and get trapped at a local point. Therefore, by increasing the number of particles, the chances to converge to a feasible solution would be higher [
36,
37]. However, this can only be performed at some period. If the time needed to track the optimum point is too long, the algorithm might not be practical to be implemented [
4,
38]. In the next subsection, a review of the algorithm inspired by swarm-based is presented.
Review on Swarm-Based Algorithm
Particle swarm optimization (PSO) is among the leading MPPT techniques used in MPPT applications [
18,
23].
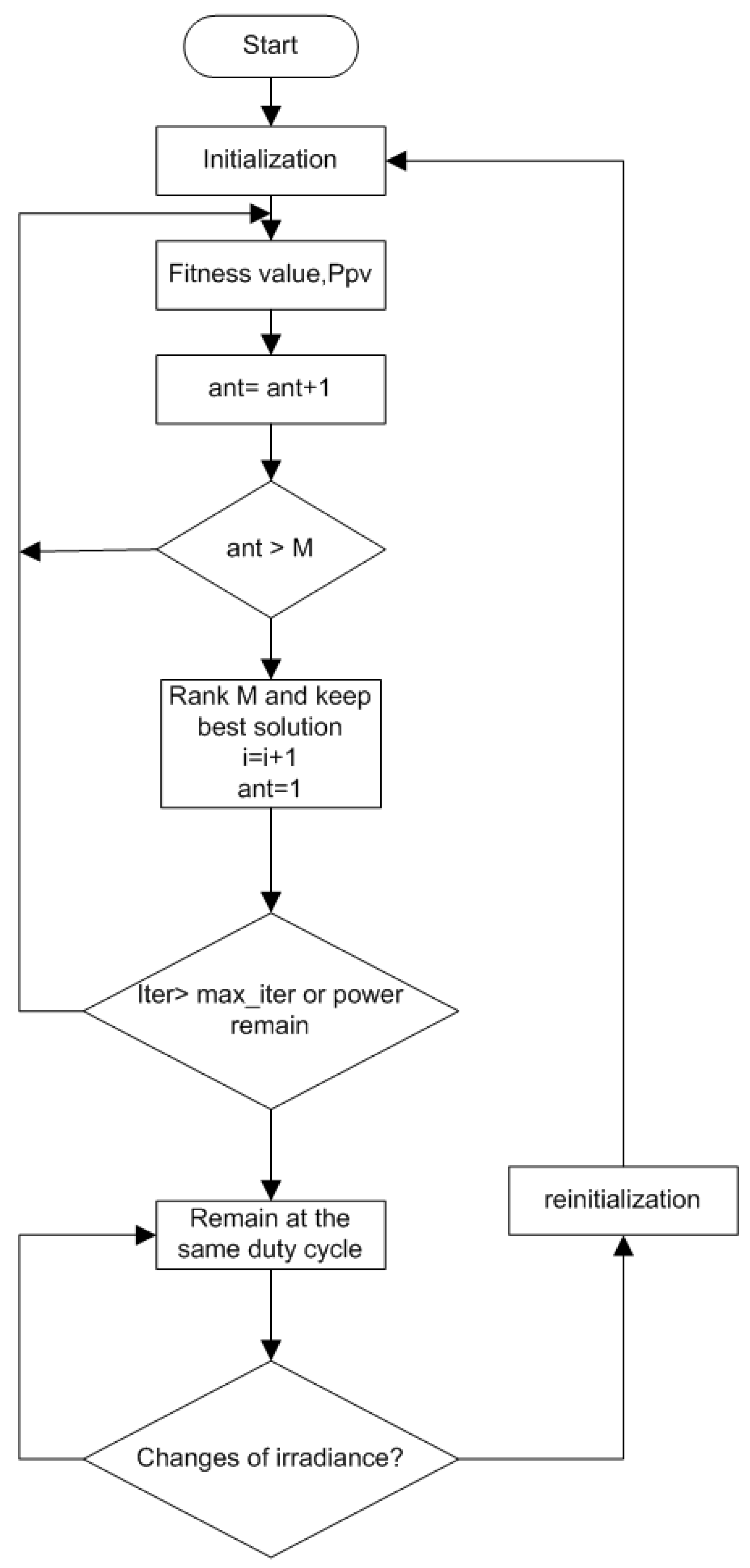
Figure 1 shows the flowchart of conventional PSO in the MPPT application. The great advantage of the PSO technique is that, once all the particles have reached the MPP, the velocity for all the particles becomes zero. This significantly allows zero steady-state oscillation once convergence is reached [
15]. This significantly reduces energy losses and improves the efficiency of the system. Another advantage of the PSO technique is that this technique has excellent performance under partial shading conditions [
18]. However, when compared with the conventional technique, this technique has a slow tracking speed compared to the gradient identification technique, as this technique involves an initialization process in the search [
7,
39].
Many single algorithms fail under partial shading conditions; thus a hybrid technique is proposed to harvest the global optimum power point to achieve better efficiency.
PSO has excellent performance under uniform irradiance but has inconsistent convergence under non-uniform irradiance. Improper selection of the initial state condition may lead to a convergence failure at a certain power [
13,
22,
34]. This problem is observed on the PSO algorithm, which has intermittent tracking under partial shading conditions [
4,
40]. The research also reveals that, once the PSO fails under certain conditions, massive steady-state oscillation occurred [
7,
41].
The authors, Ishaque and Salam proposed a deterministic PSO as a solution to the above-mentioned problem [
38]. In the proposed technique, the randomness of the PSO, which causes failure at a local optimum point, is replaced with deterministic behavior. During each search, the particle is following the deterministic behavior with a constant number of particles. The authors also assigned boundaries in their search to enhance the search under rapid changes in the environment. The proposed method utilized only one tuning parameter in their search, in which they reduced the complexity of the control parameter tuning. Comparison with the HC technique shows that the proposed technique has excellent performance to track both LMPP and GMPP with high speed and efficiency.
An adaptive PSO is introduced by Eltamaly et al. to solve the problem of the conventional PSO. In their technique, the initial duty cycle is assigned to the P-V curve instead of using random initialization as in the conventional PSO algorithm. The great finding of this technique is that in comparison to the conventional PSO, the proposed technique has reduced the premature convergence to 1.80% instead of 15.20% under shading conditions.
A dynamic particle cuckoo search is proposed by Zhao et.al.
Figure 2 shows a flowchart of the cuckoo search algorithm [
42]. The proposed technique is to address the sensitivity of the initial condition in the MPPT algorithm. In the proposed technique, the dynamic sampling time MPPT is used to deal with random shading patterns. Dynamic particles enhanced the searching process by expanding the area of the search into a wider search space. The proposed technique improved the convergence speed and efficiency of the PV system.
Ant colony optimization (ACO) is another swarm-based inspired algorithm. Normally, when searching for food, a single ant will leave a scent trail, which allows other ants to follow. The transition of knowledge shared between each other leads from poor to the best solution found [
26,
43].
Figure 3 shows a flowchart of the ACO in the MPPT application. ACO superiority performance is confirmed by few researchers over the conventional PSO in tracking the global optimum point [
26,
43]. It shows that its convergence is independent of its initial position and it has almost zero steady-state oscillations.
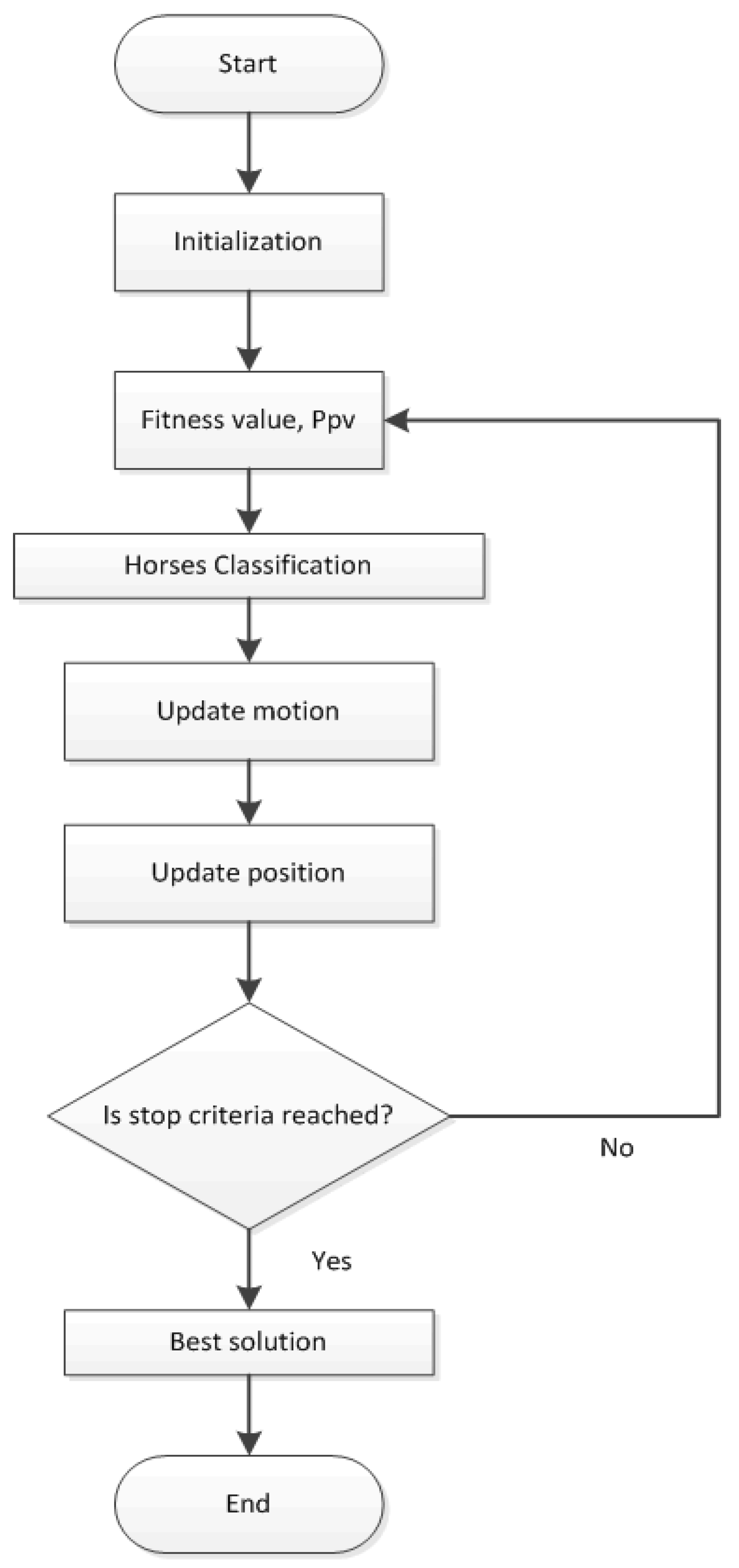
Another nature-inspired technique is horse herd optimization (HOA). This HOA technique is applied in the MPPT application by Sajid et. al. [
13].
Figure 4 shows the flowchart of the HOA. In their findings, it shows that this HOA has superior performance under local and global tracking. Additionally, this algorithm only utilizes one single parameter in the search, resulting in zero steady-state oscillation and a fast tracking time.
Salp swarm algorithm (SSA) is inspired by a family of salps called Salpidae [
16]. This family of salps have a transparent barrel-shaped body made of a tissue similar to that of a jellyfish. They move forward by pumping water similarly to jellyfishes. The exciting behavior of this family of salps is their ability to form a salp chain. The forming of a salps chain is still a mystery to researchers; however, it is believed that the formation of a chain is to coordinate changes in foraging [
16]. It found that the parallel formation of salps chains is used in the exploration and exploitation of aid to better search for an optimum solution [
16,
29,
30,
31].
Figure 5 shows a flowchart of SSA in the MPPT application. Few researchers utilize this SSA in MPPT application, and based on their findings, this SSA shows a remarkable performance over other algorithms, with a high accuracy of tracking and low steady-state oscillations [
16,
31].
Table 1 shows a comparison of the existing algorithms used in the MPPT application based on the control scheme, type of the converter, pattern complexity, convergence speed, and tracking efficiency. Given the findings from
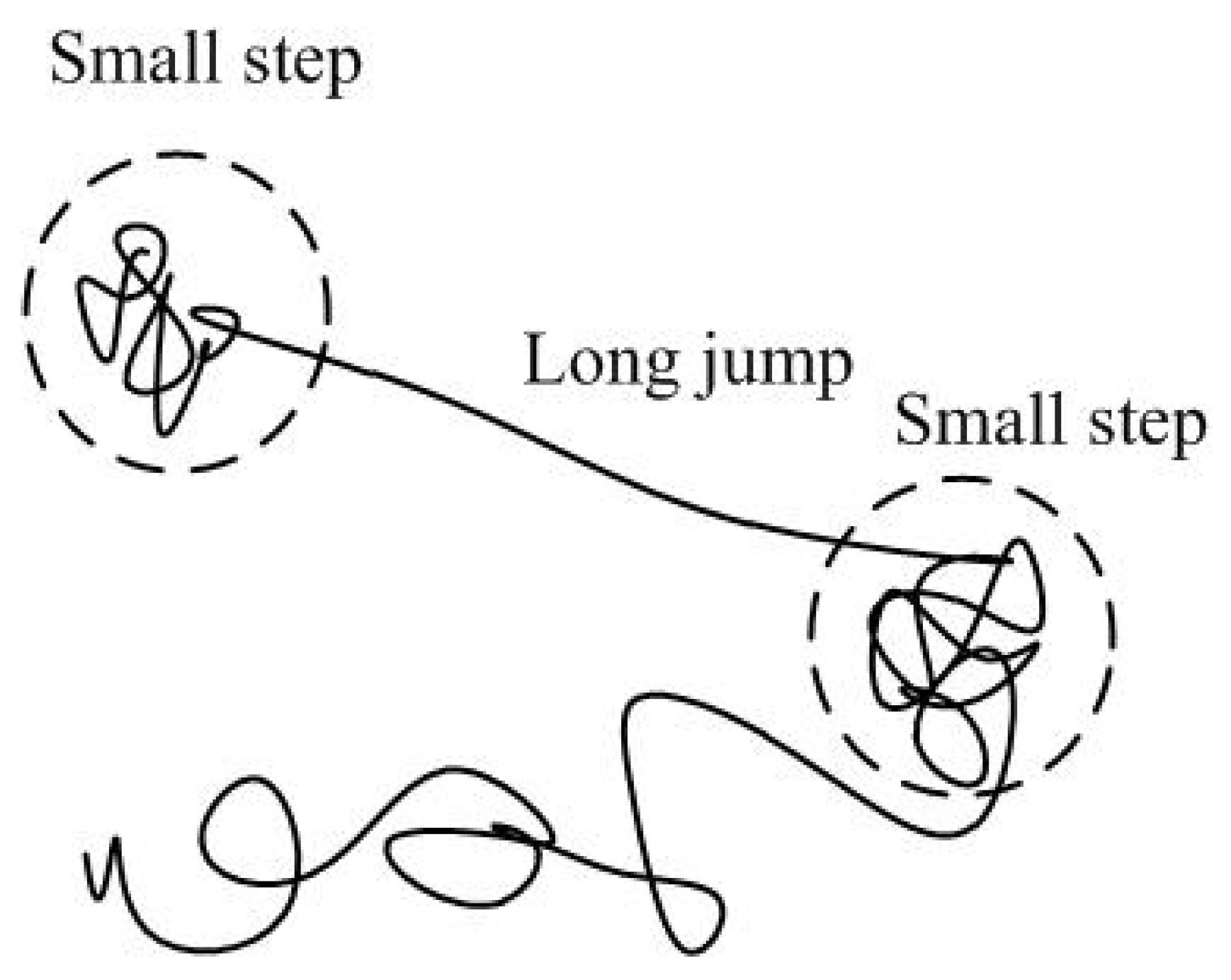
Table 1, it can be stated that Levy fight outperforms other nature-inspired algorithms in terms of tracking local and global optimum points with a high tracking speed and efficiency. Driven by the excellent performance of the Levy flight, shown in the table of comparison, the authors were inspired to propose a new modified Levy in the PV system. This paper discusses a modified Levy-PSO to improve the searching capability of the conventional PSO algorithm with a boost converter. The key concept here is to reduce the probability of getting trapped at the local point of the conventional PSO. Besides, the velocity is determined randomly based on the P-V characteristics. The proposed method provides few advantages, such as (a) the initial position of the particles are constant for each run and the solution depends on the randomness of the Levy flight search, (b) the merge and check process is added to increase the computational speed, (c) the boundary of the P-V curve is limited to D
max for improving the search during rapid environmental change.
This paper is the extension from the previous paper as presented in [
37]. In this paper, further evaluation on the effectiveness of the modified Levy flight-PSO with boost converter is studied more in-depth and is compared with the existing MPPT algorithms. Specifically, a detailed examination on the performance of the output boost converter, which has not been presented in [
37], is now included in this paper.
The major contributions of this paper are listed as below:
A modified Levy-based particle swarm optimization with a boost converter is introduced with small swarm population.
Simulation and experiment verification of the proposed modified Levy-based particle swarm optimization with a boost converter.
Evaluate the performance of the proposed modified Levy-based particle swarm optimization with existing MPPT algorithm.
The rest of the paper is structured as follows.
Section 2 discusses the analysis of the PV array under partial shading.
Section 3 describes the conventional PSO, while
Section 4 describes the Levy flight search.
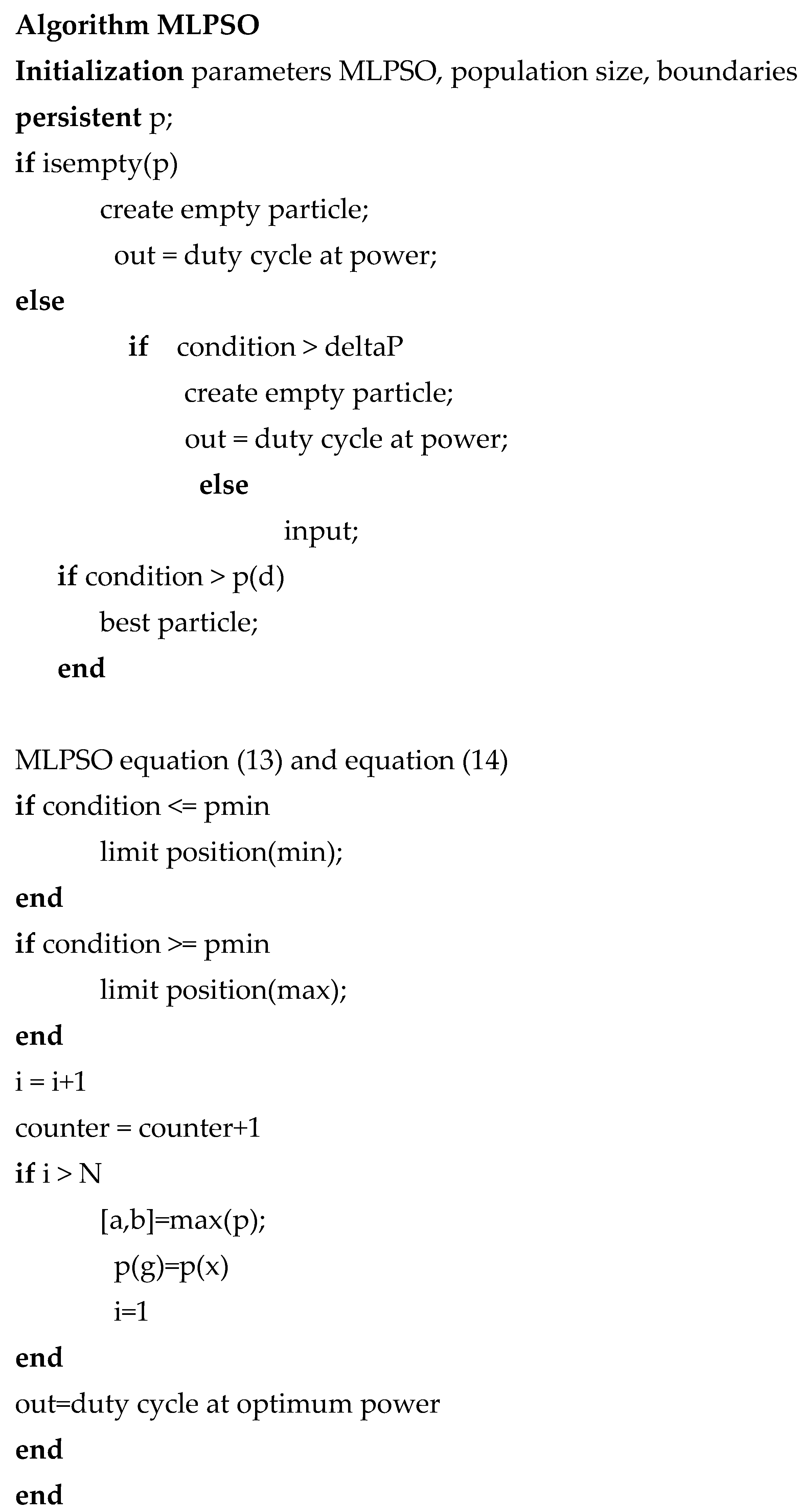
Section 5 discusses the proposed modified Levy-PSO (MLPSO). In
Section 6, the performance of the modified Levy-PSO is evaluated by a simulation, and
Section 8 shows the simulation and experimental results. Finally,
Section 9 provides the conclusion.




 ,
, 





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}