
An Improved Frequency-Adaptive Virtual Variable Sampling-Based Repetitive Control for an Active Power Filter

Abstract
1. Introduction
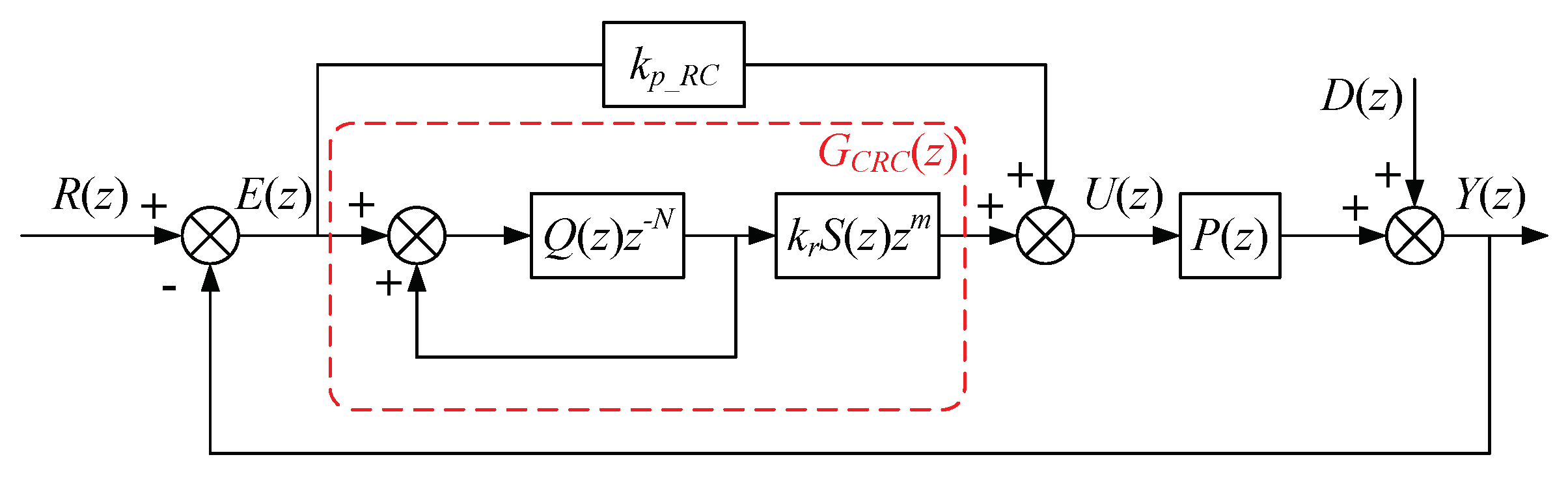
2. Conventional Repetitive Controller
3. Improved Frequency-Adaptive Repetitive Controller
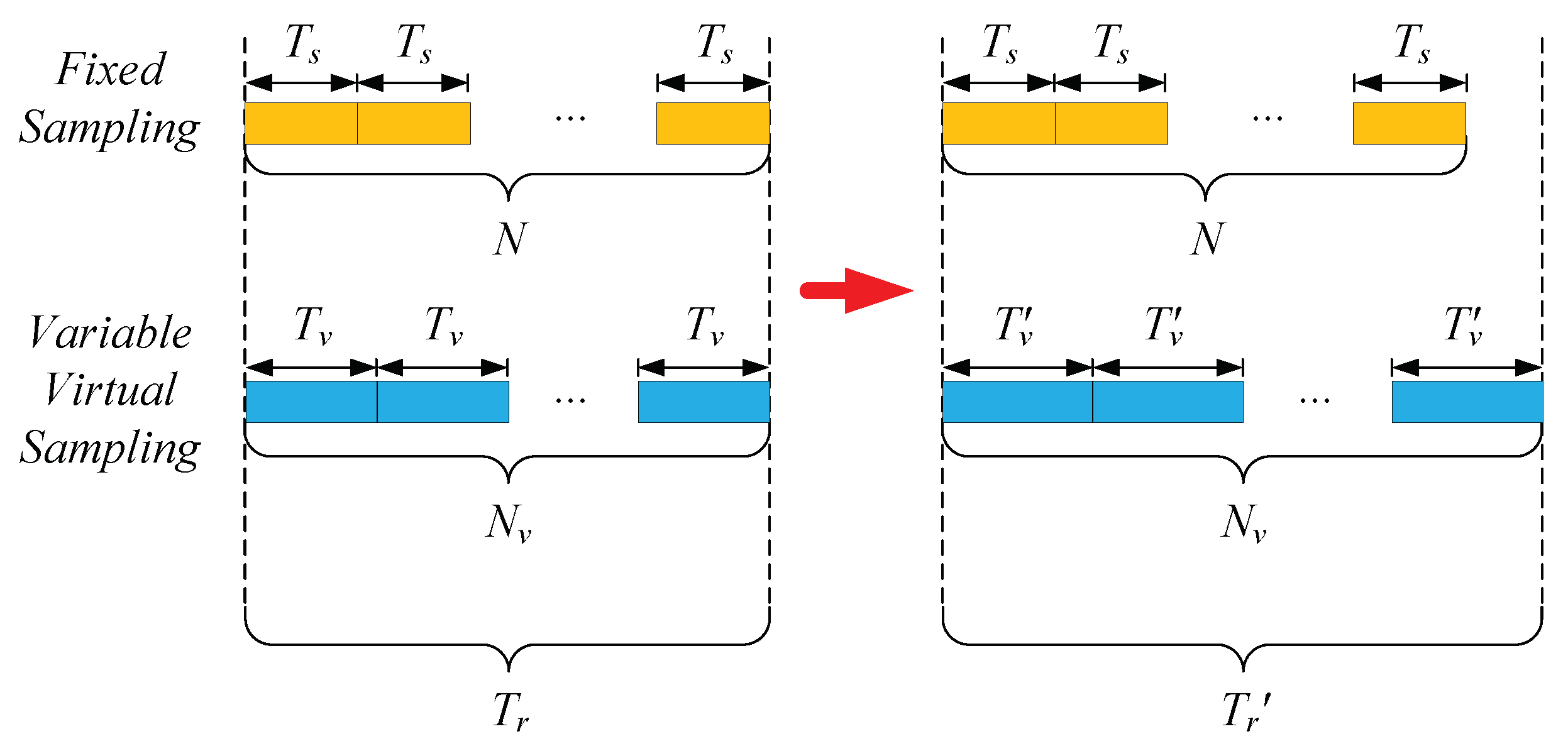
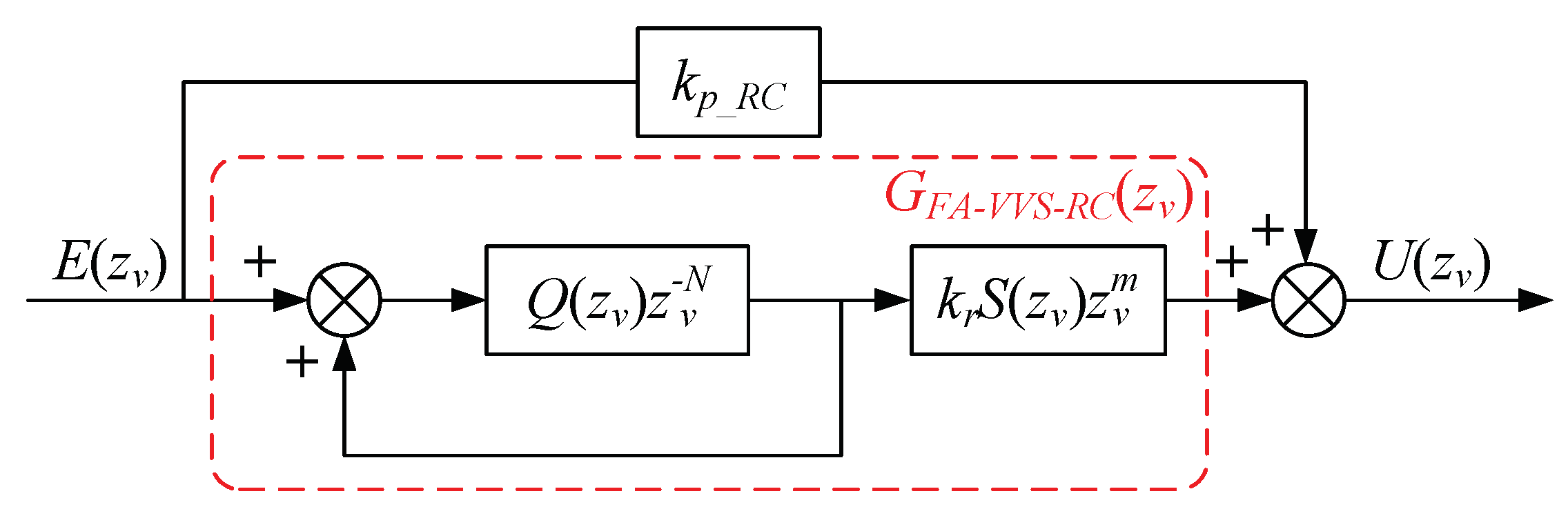
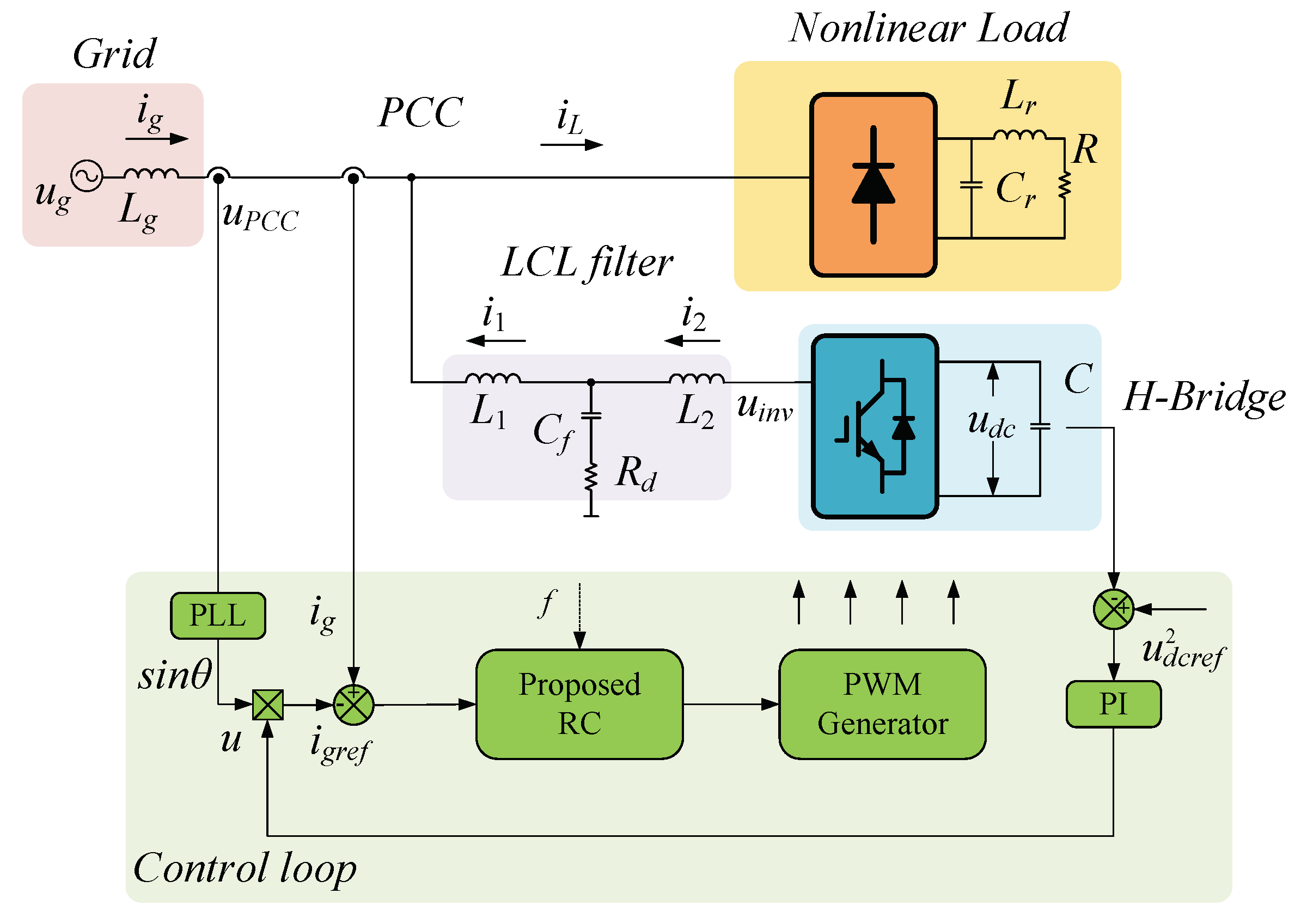
3.1. Description of Control Scheme
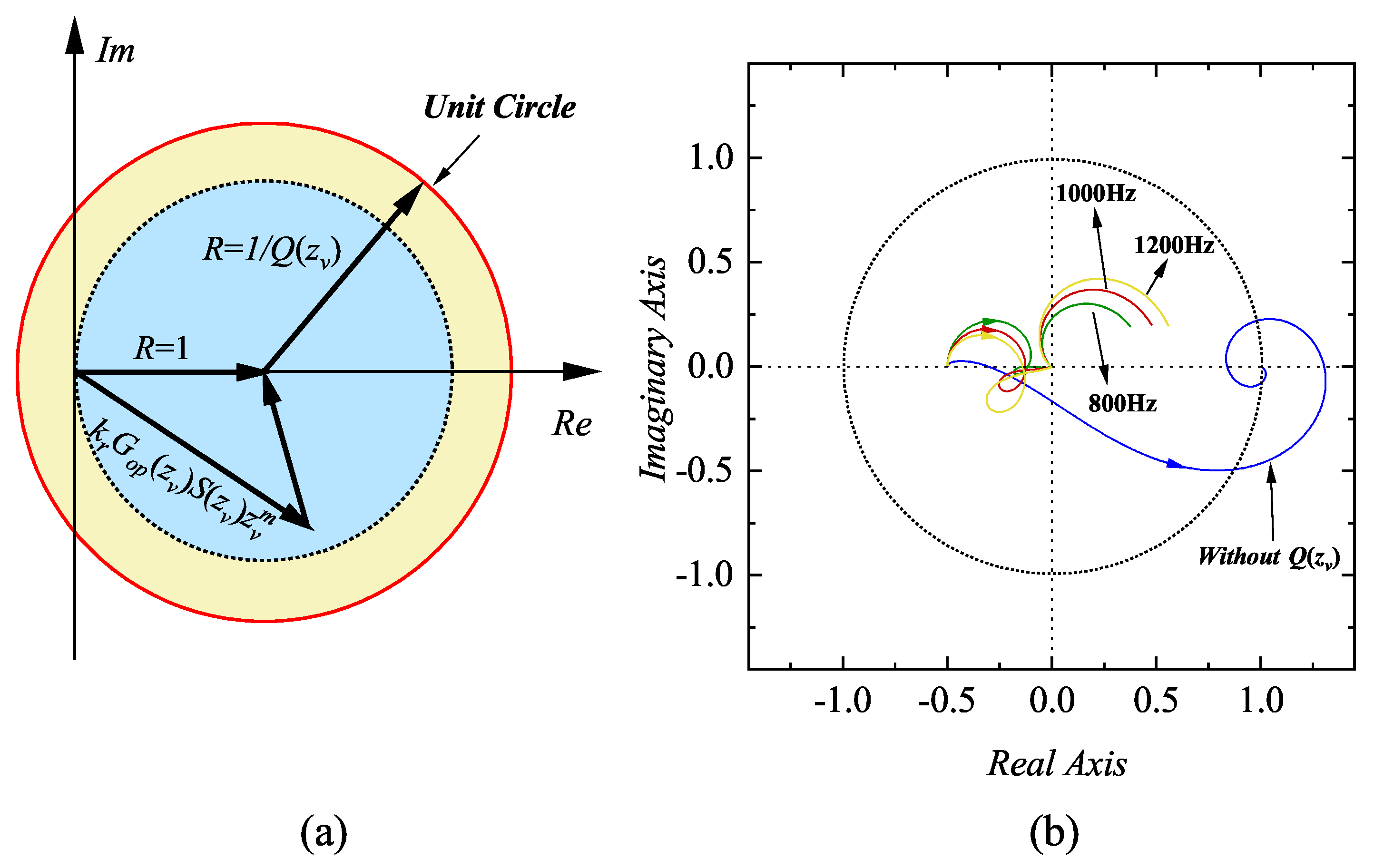
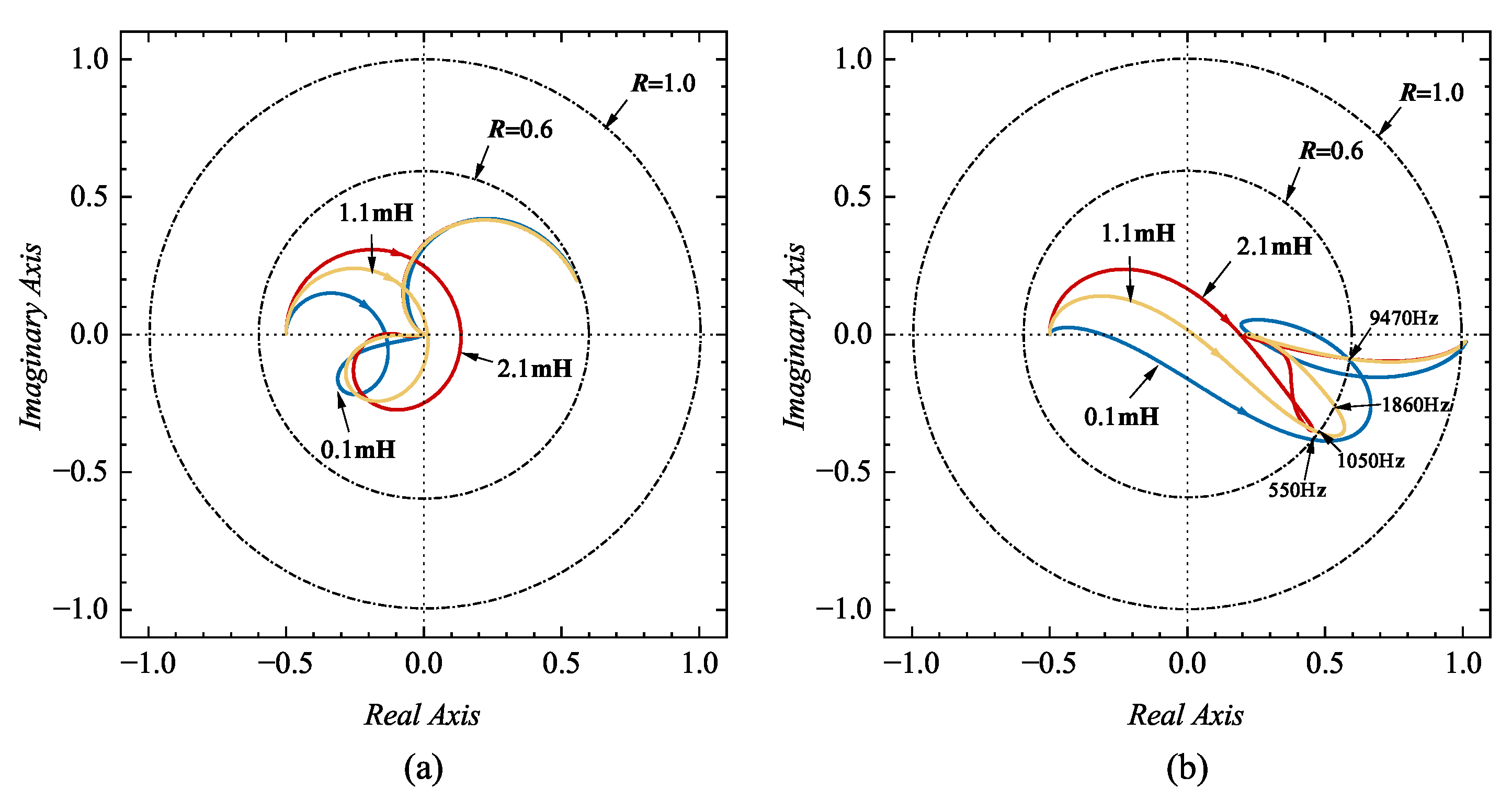
3.2. Stability Analysis
- .
- The roots of are all inside the unit circle.
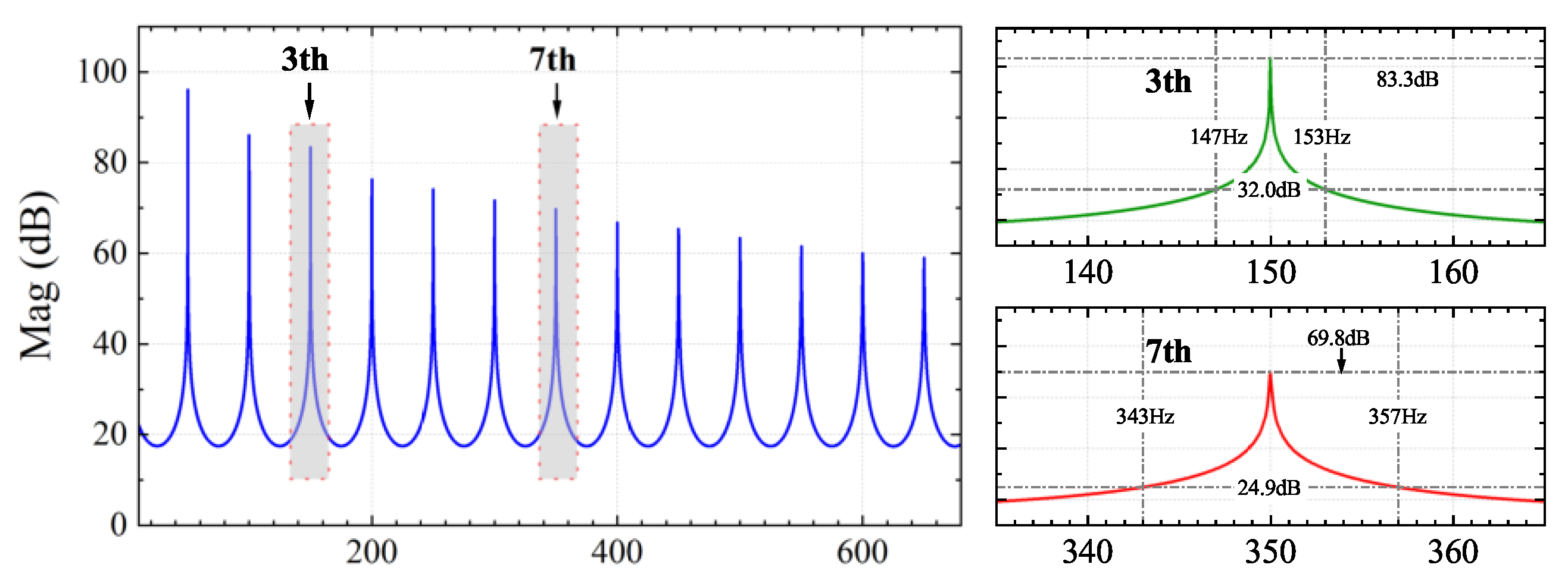
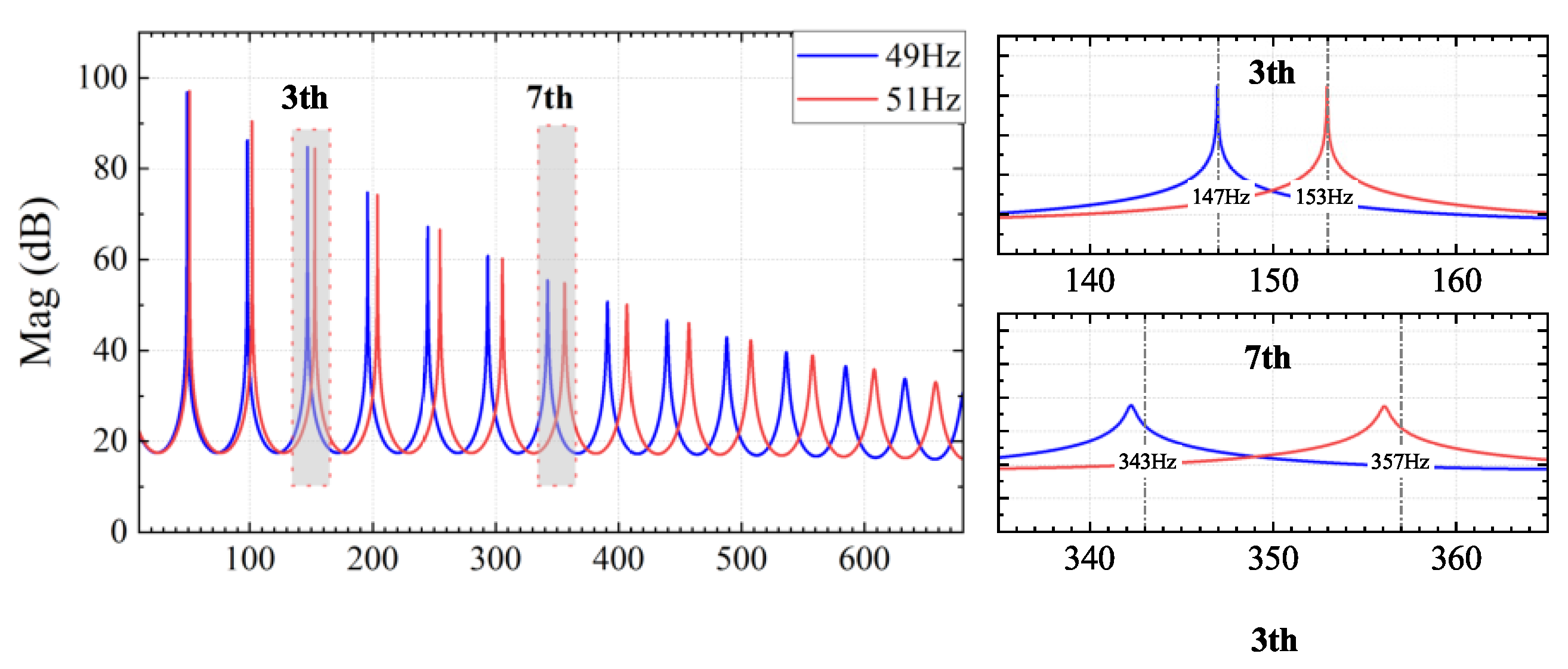
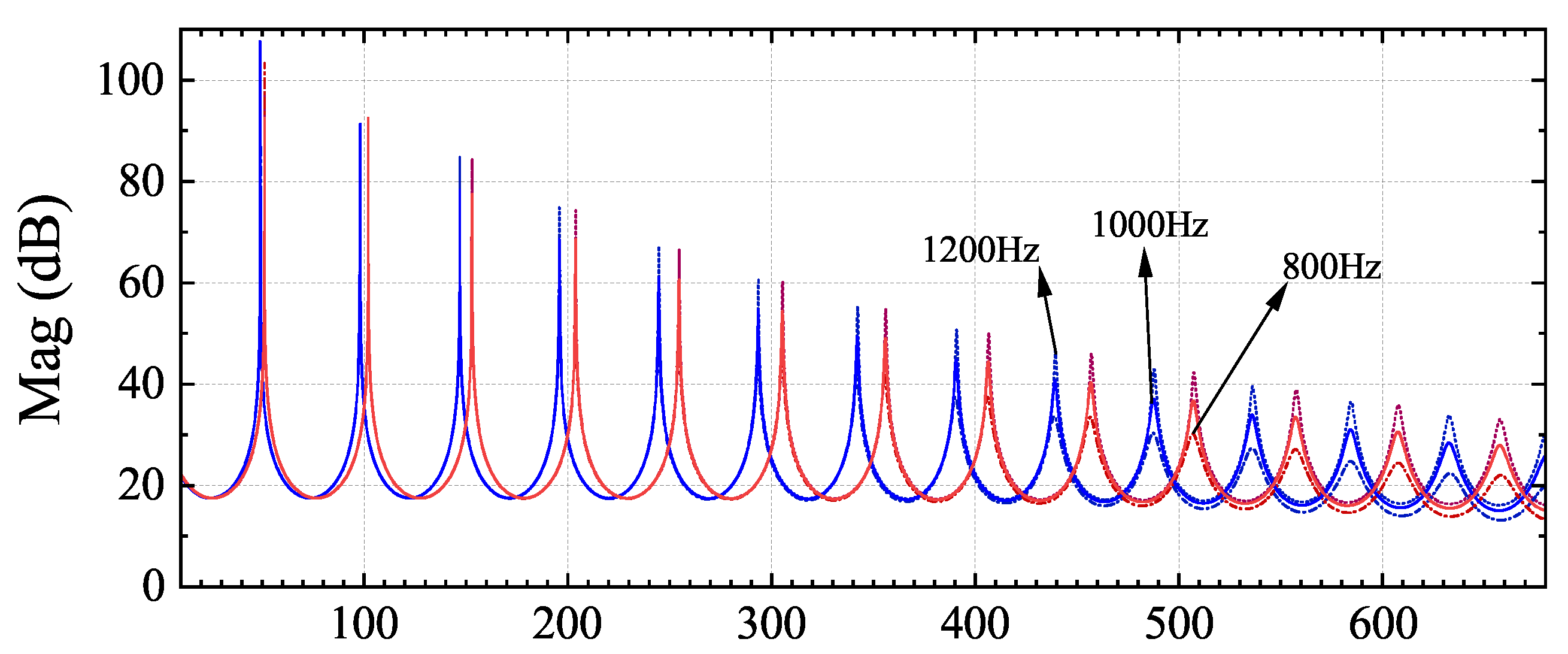
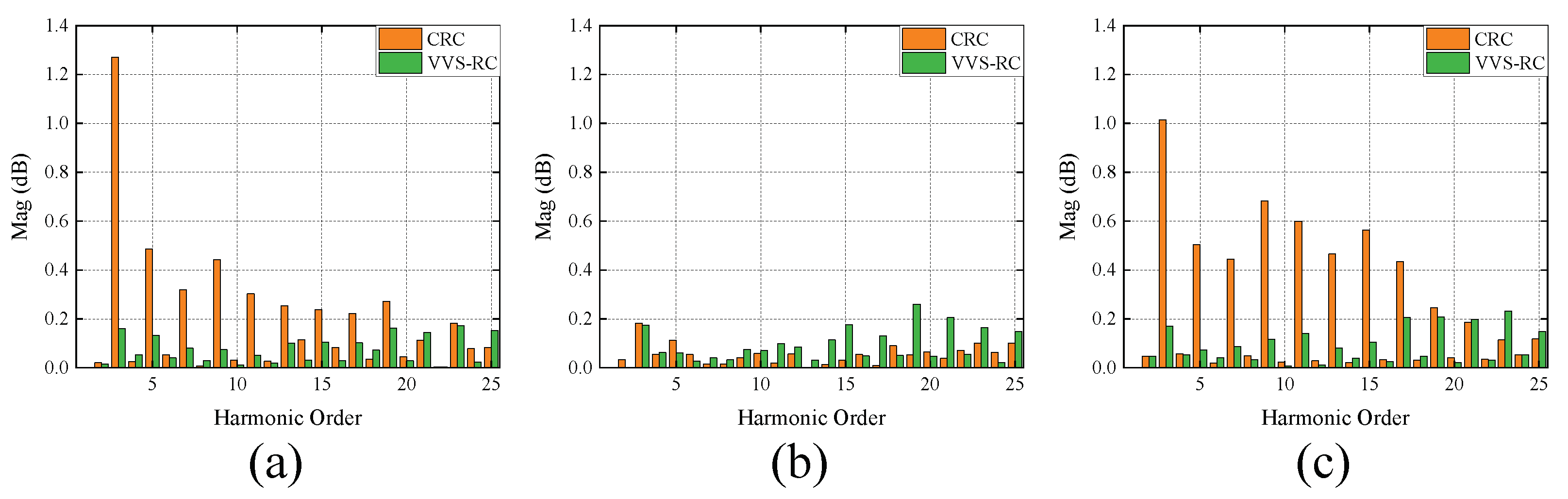
3.3. Harmonic Suppression Analysis
4. Parameter Design
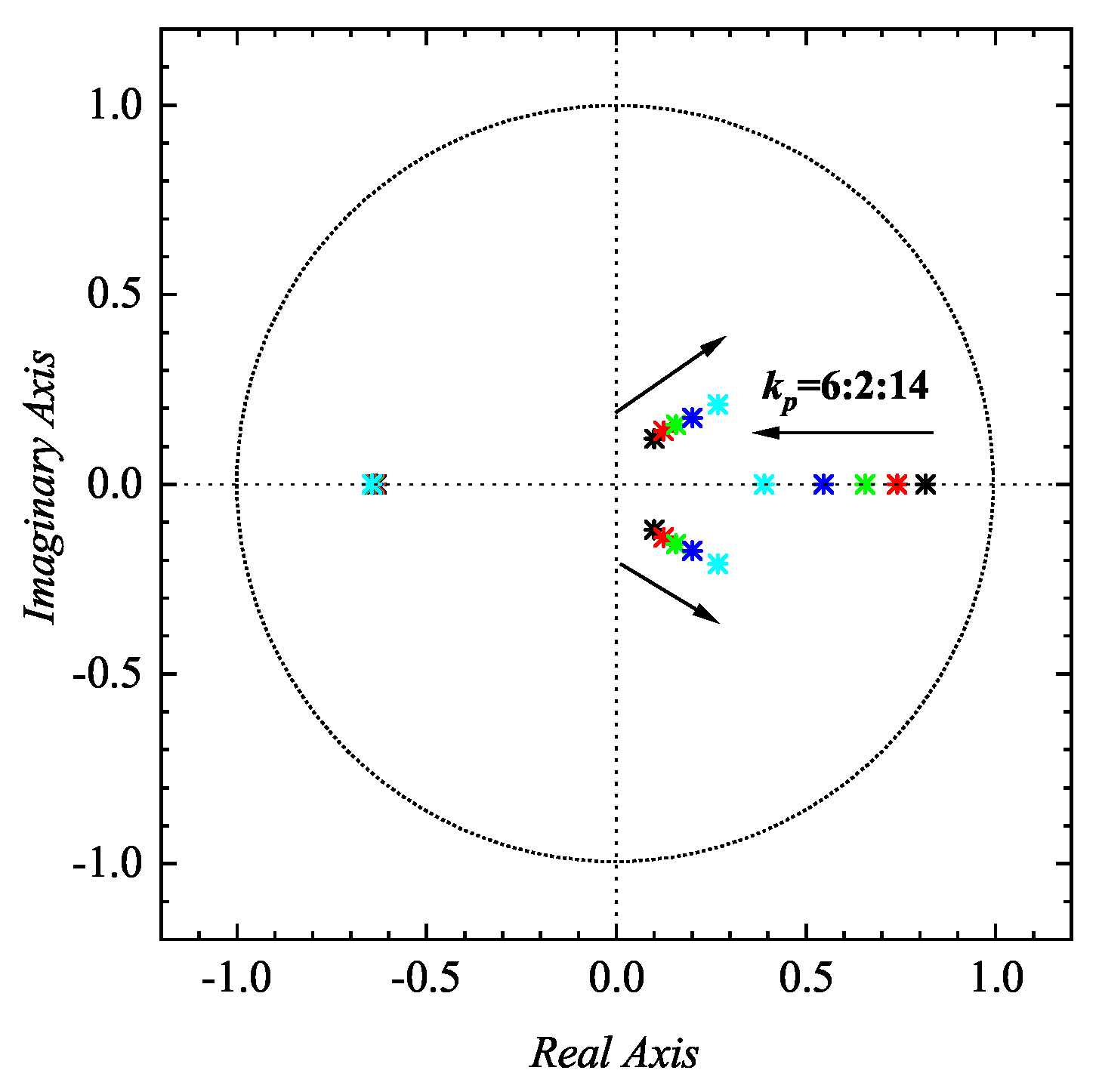
4.1. Design of
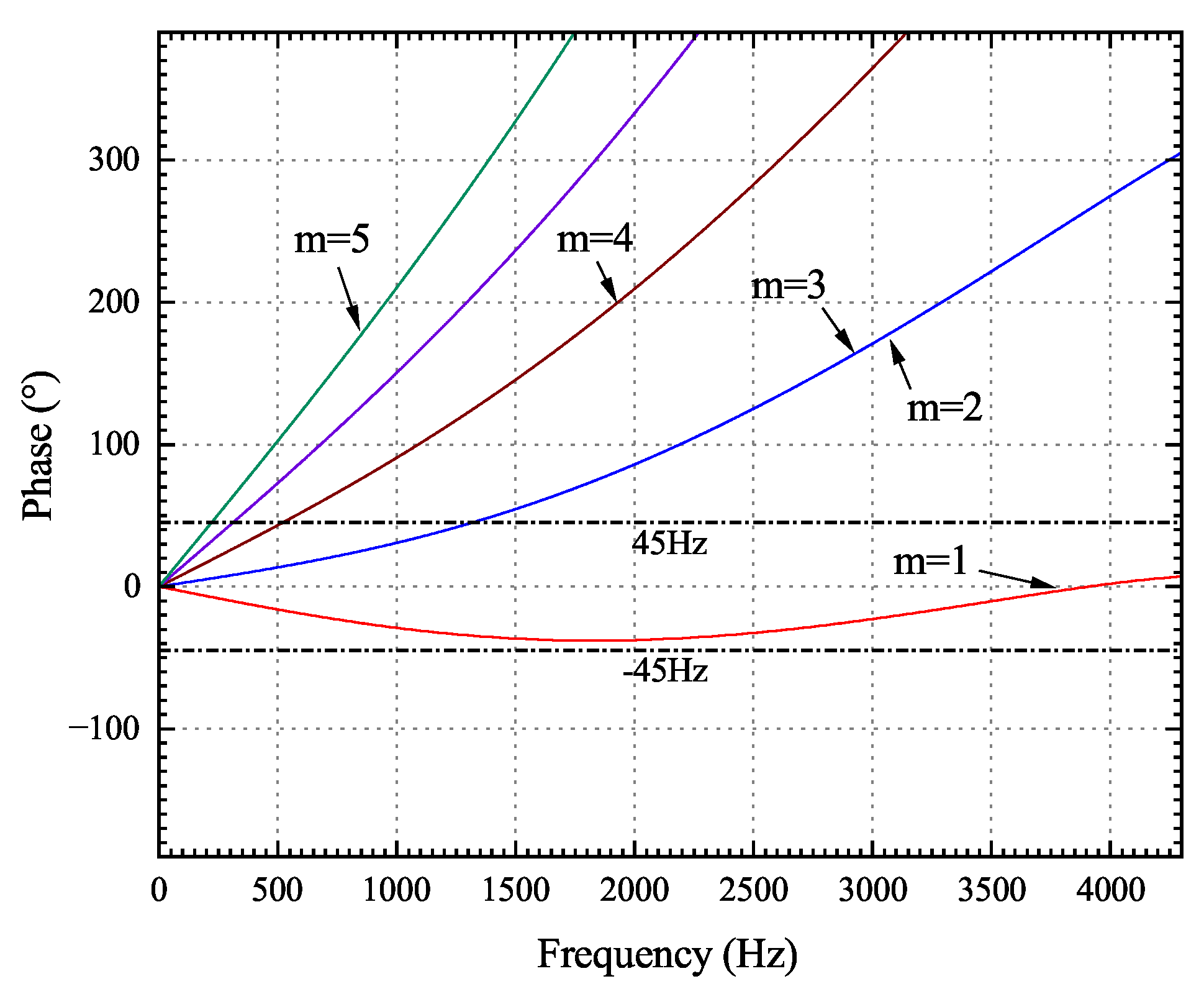
4.2. Design of m
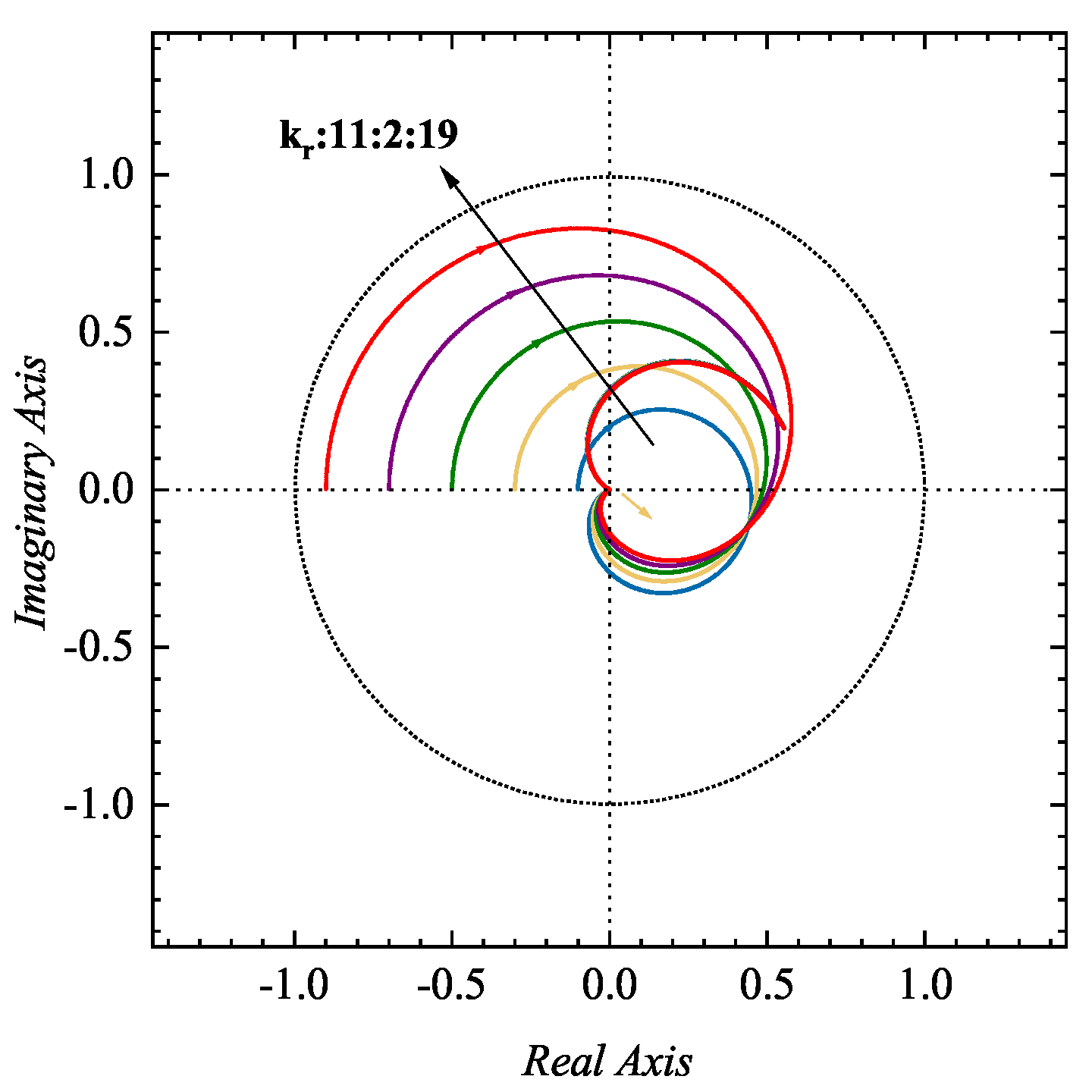
4.3. Design of
4.4. Design of Cutoff Frequency
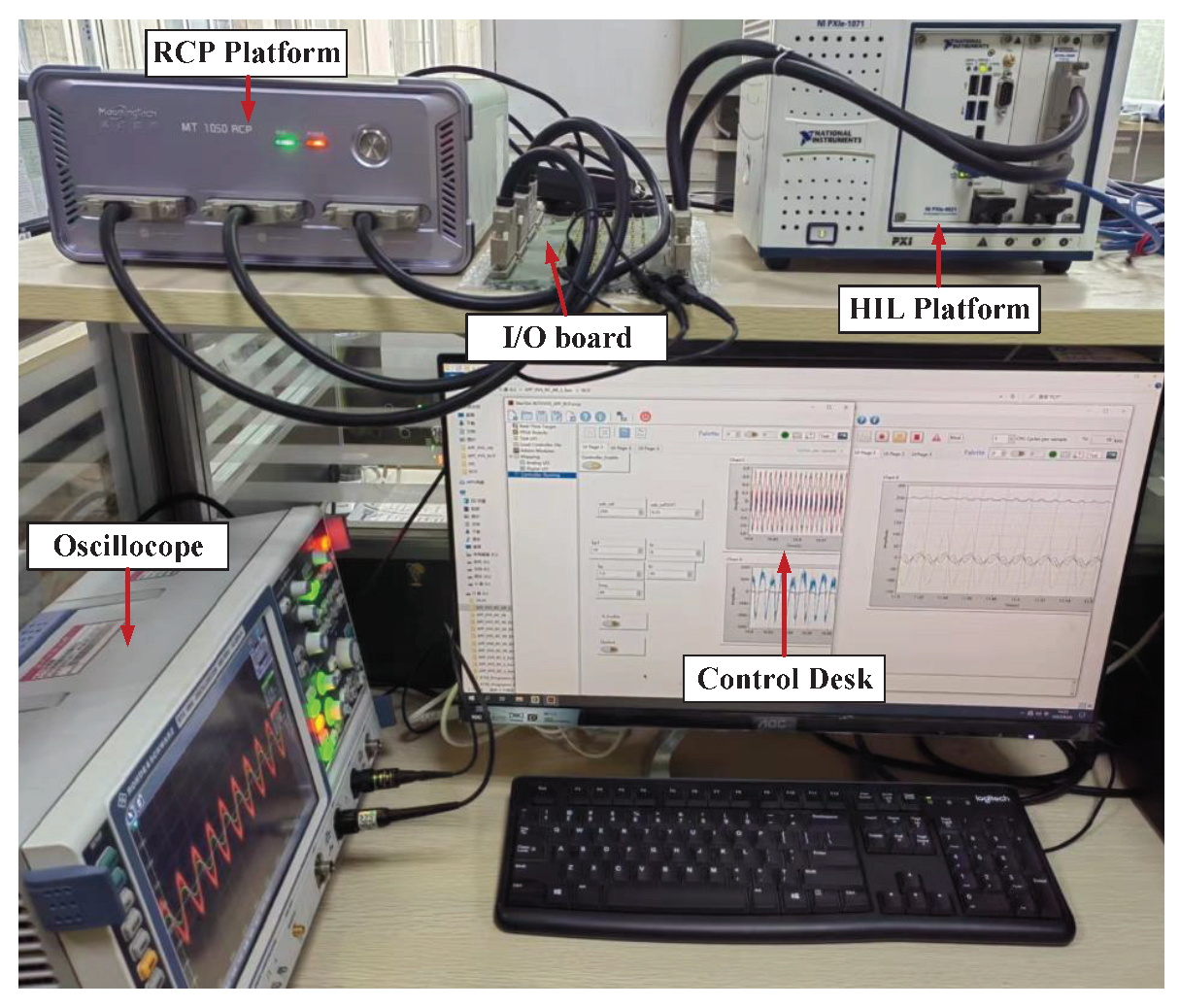
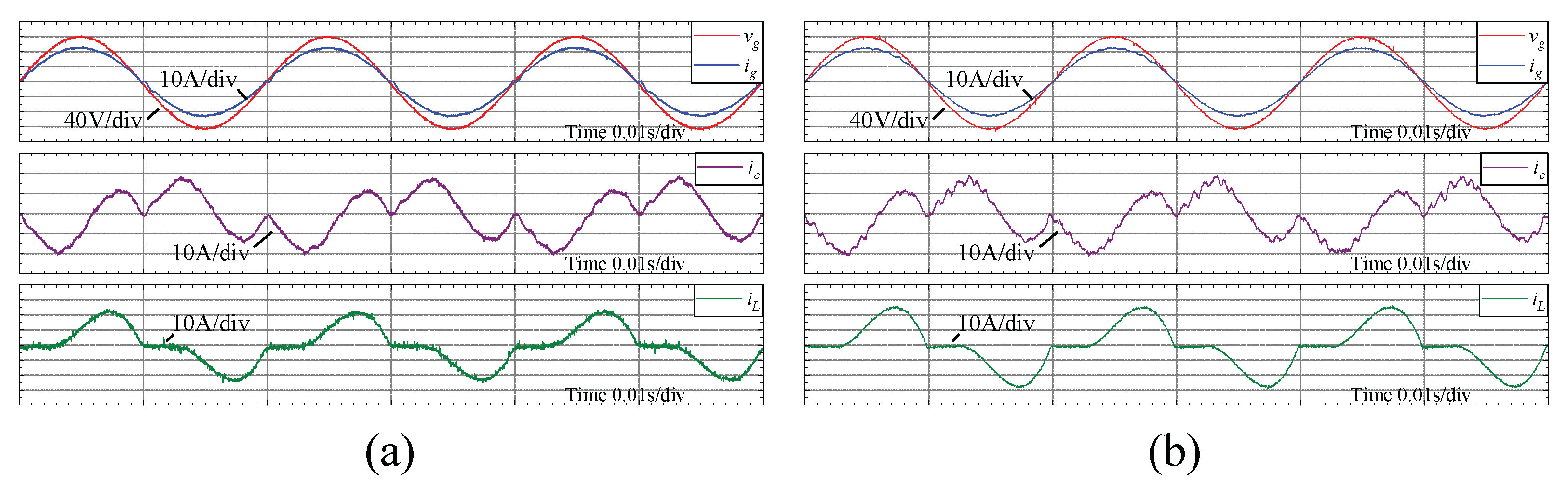
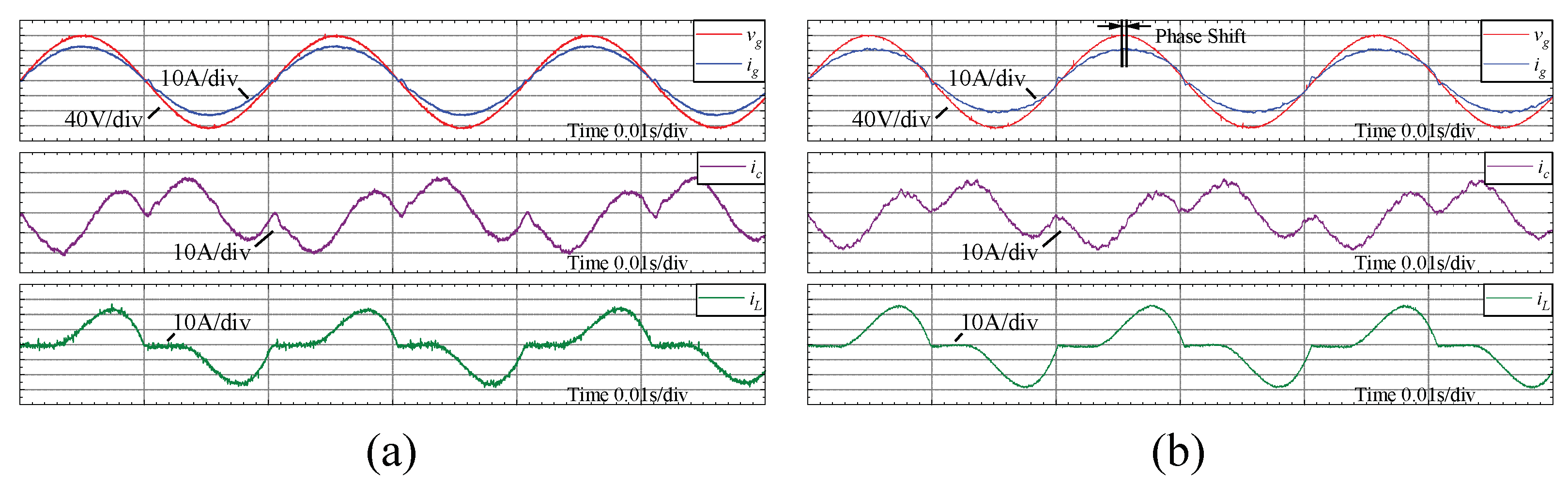
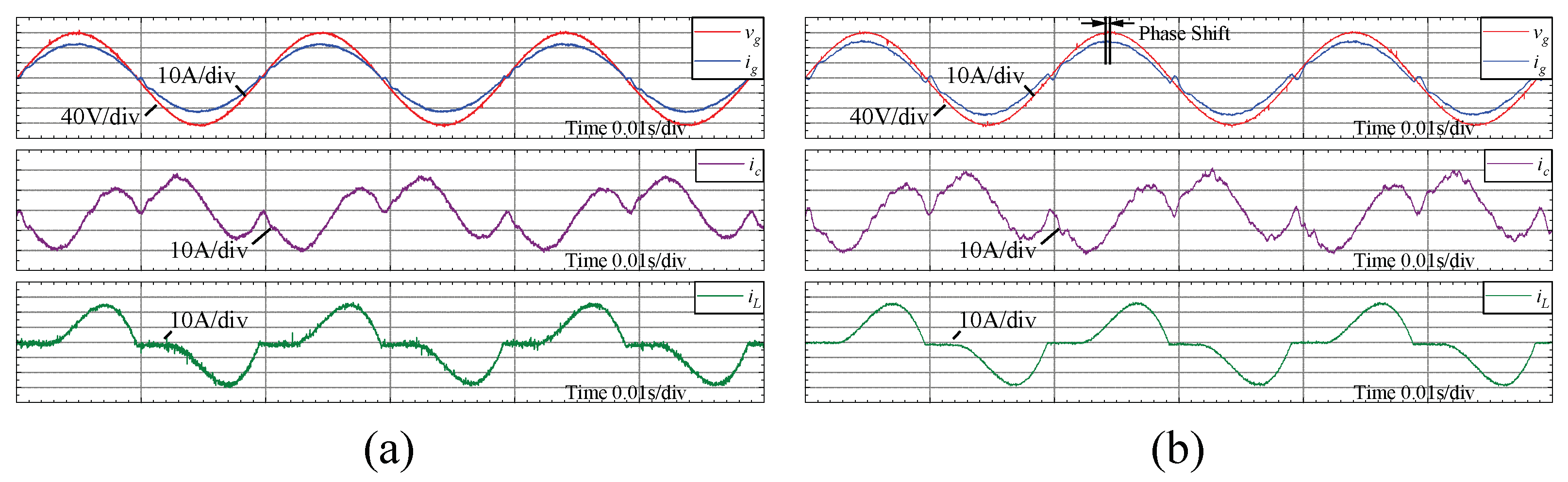
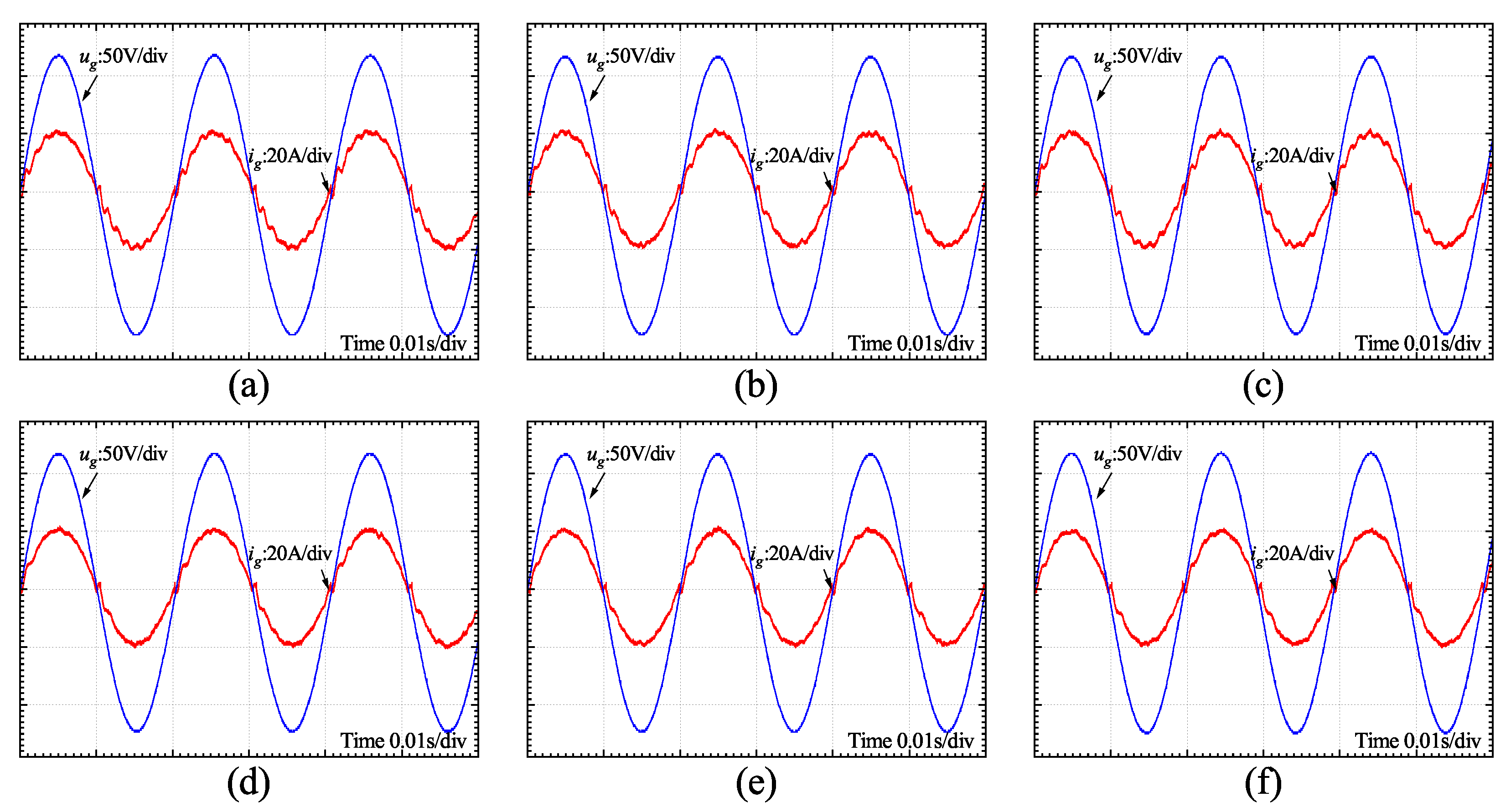
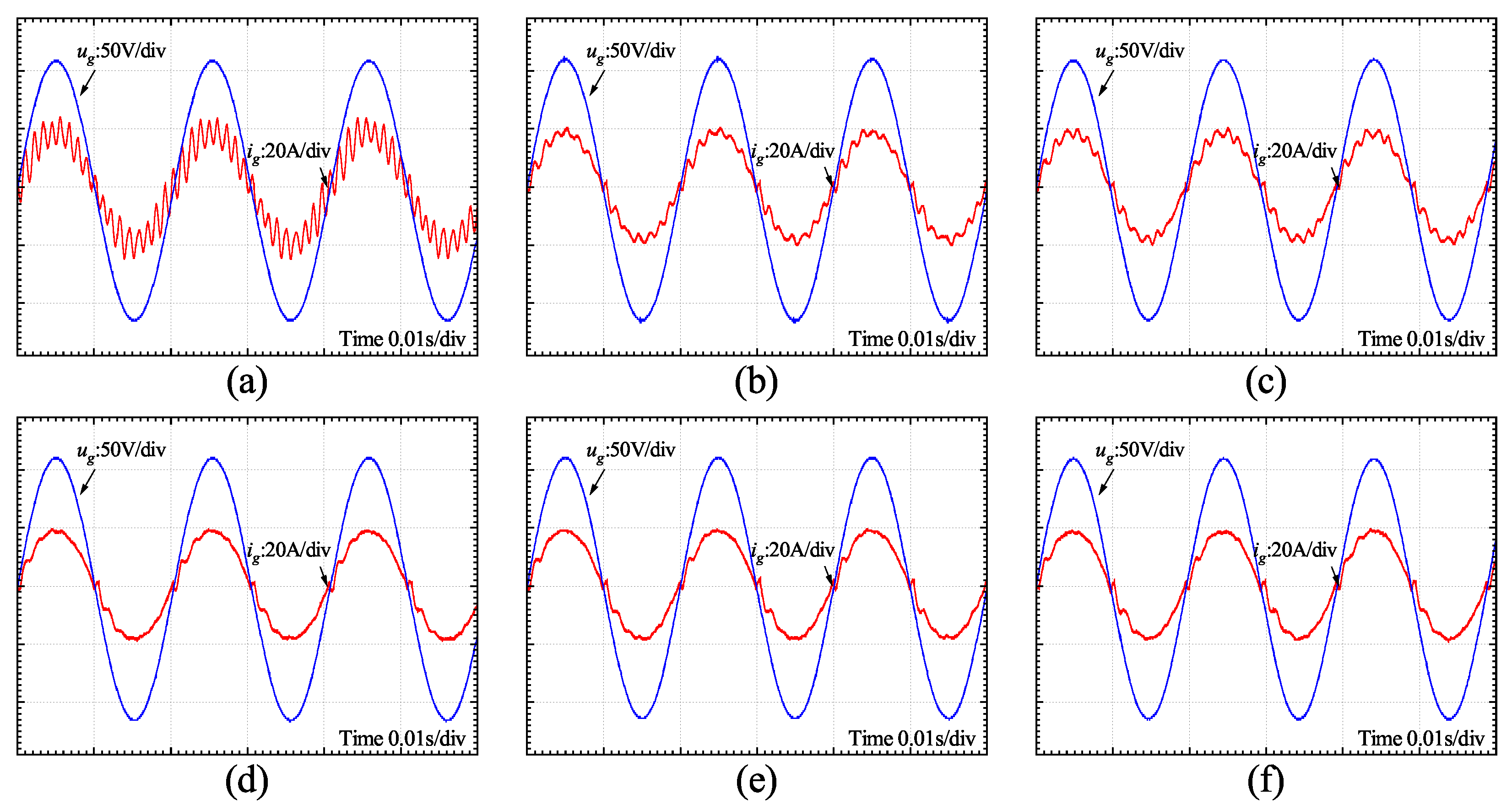
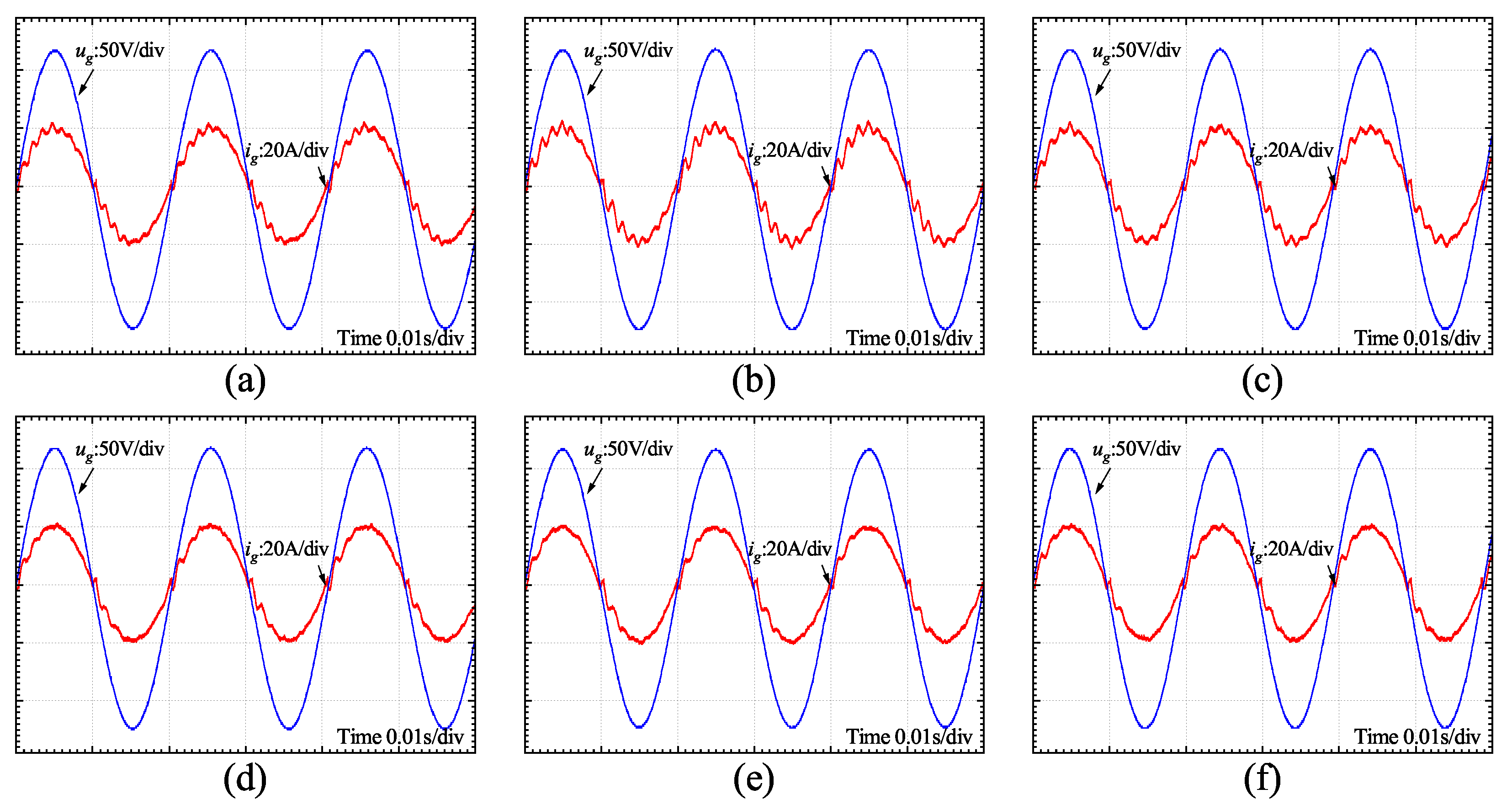
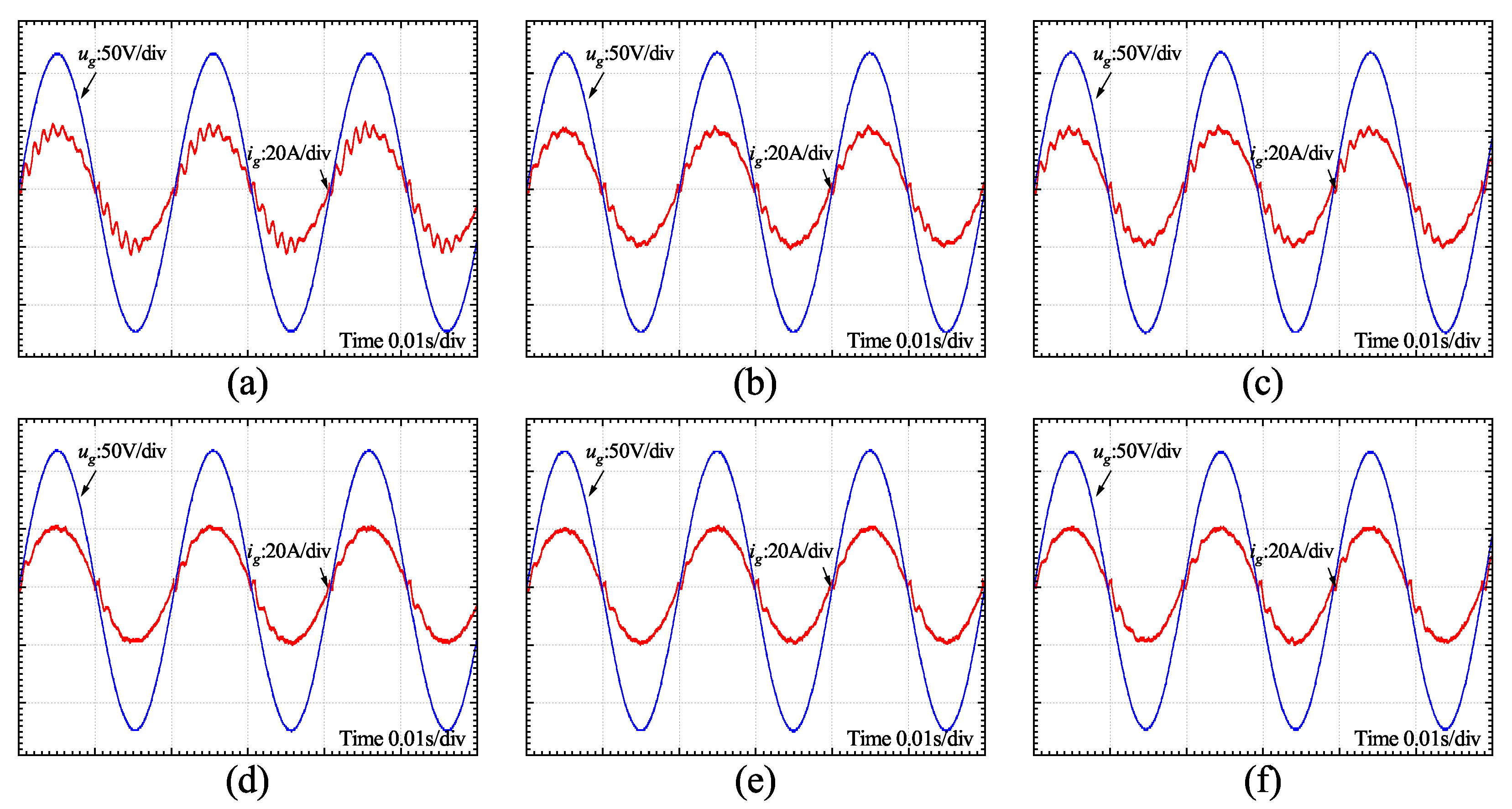
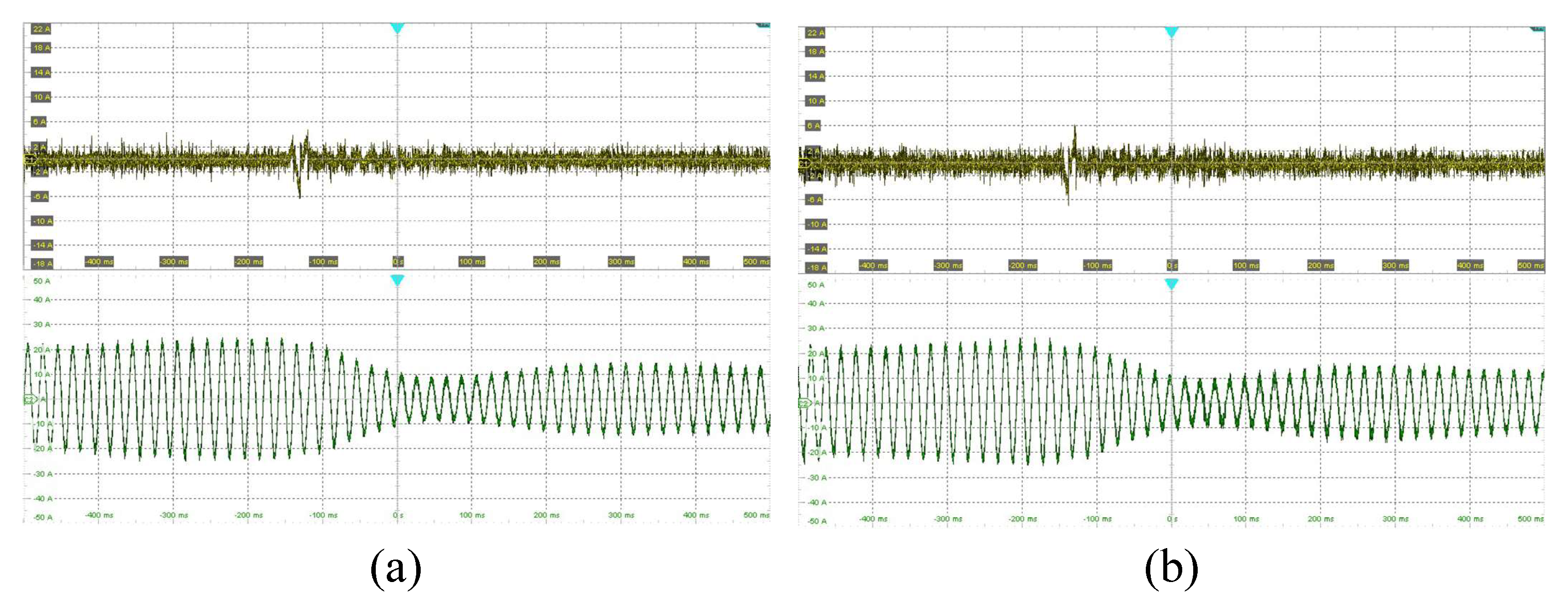
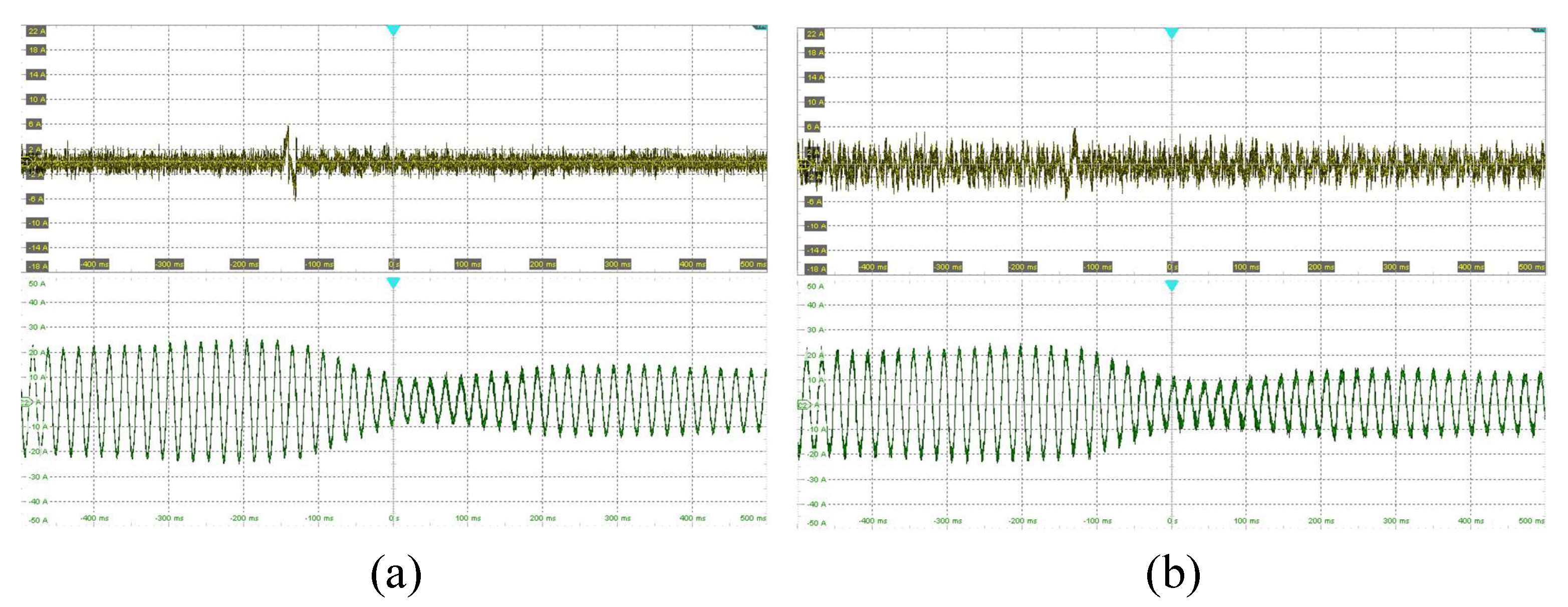
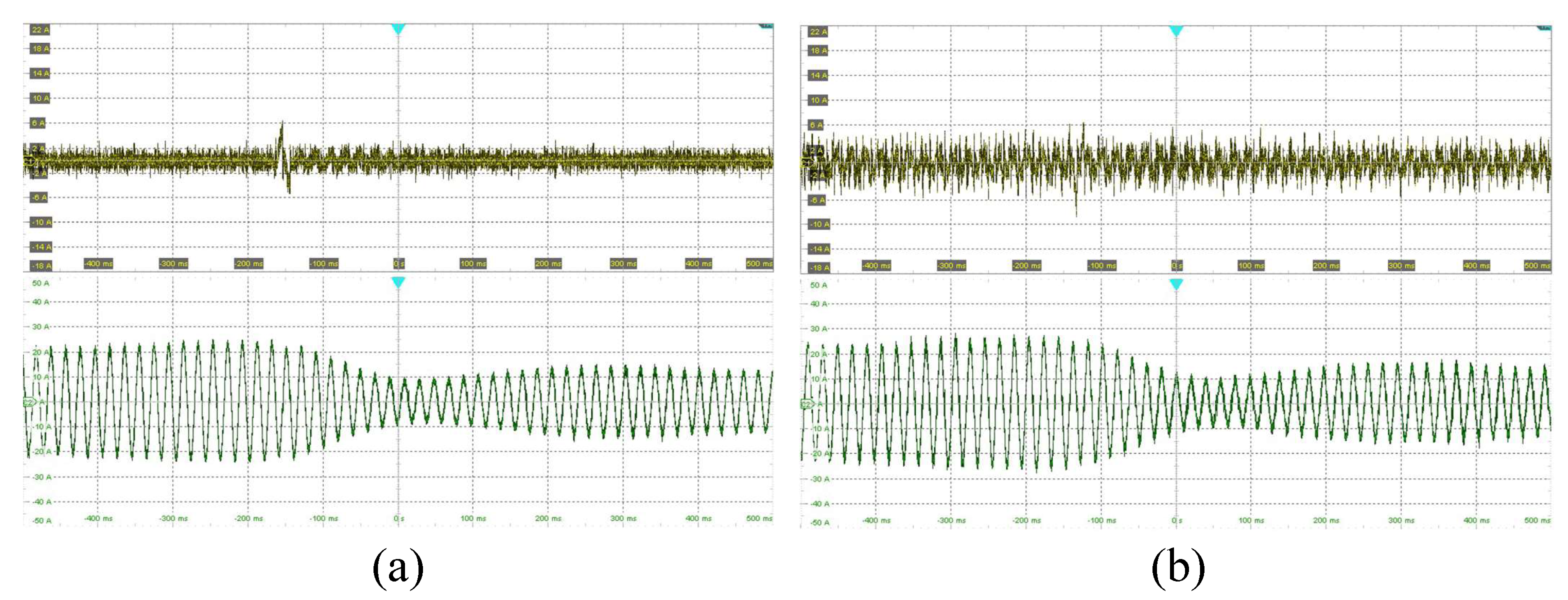
5. Experiment
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mishra, A.K.; Das, S.R.; Ray, P.K.; Mallick, R.K.; Mohanty, A.; Mishra, D.K. PSO-GWO optimized fractional order PID based hybrid shunt active power filter for power quality improvements. IEEE Access 2020, 8, 74497–74512. [Google Scholar] [CrossRef]
- Chen, D.; Xiao, L.; Yan, W.; Li, Y.; Guo, Y. A heat dissipation design strategy based on computational fluid dynamics analysis method for shunt active power filter. Energy Rep. 2022, 10, 229–238. [Google Scholar] [CrossRef]
- Fang, J.; Xiao, G.; Yang, X.; Tang, Y. Parameter design of a novel series-parallel-resonant LCL filter for single-phase half-bridge active power filters. IEEE Trans. Power Electron. 2017, 32, 200–217. [Google Scholar] [CrossRef]
- Franca, B.W.; Aredes, M.; da Silva, L.F.; Gontijo, G.F.; Tricarico, T.C.; Posada, J. An Enhanced Shunt Active Filter Based on Synchronverter Concept. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 494–505. [Google Scholar] [CrossRef]
- Echalih, S.; Abouloifa, A.; Lachkar, I.; Hekss, Z.; El Aroudi, A.; Giri, F.; Al-Numay, M.S. Nonlinear Control Design and Stability Analysis of Single Phase Half Bridge Interleaved Buck Shunt Active Power Filter. IEEE Trans. Circuits Syst. I-Regul. Pap. 2022, 69, 2117–2128. [Google Scholar] [CrossRef]
- Kumar, R.; Bansal, H.O.; Gautam, A.R.; Mahela, O.P.; Khan, B. Experimental Investigations on Particle Swarm Optimization Based Control Algorithm for Shunt Active Power Filter to Enhance Electric Power Quality. IEEE Access 2022, 10, 54878–54890. [Google Scholar] [CrossRef]
- Frifita, K.; Boussak, M. A novel strategy for high performance fault tolerant control of shunt active power filter. IEEE Electr. Eng. 2022, 104, 2531–2541. [Google Scholar] [CrossRef]
- De souza, L.L.; Rocha, N.; Fernandes, D.A.; De Sousa, R.P.R.; Jacobina, C.B. Grid Harmonic Current Correction Based on Parallel Three-Phase Shunt Active Power Filter. IEEE Trans. Power Electron. 2022, 37, 1422–1434. [Google Scholar]
- De Roover, D.; Bosgra, O.H.; Steinbuch, M. Internal-model-based design of repetitive and iterative learning controllers for linear multivariable systems. Int. J. Control 2000, 73, 914–929. [Google Scholar] [CrossRef]
- Chen, D.; Chen, H.; Hu, Y.; Chen, G. A novel serial structure repetitive control strategy for shunt active power filter. Compel-Int. J. Comp. Math. Electr. Electron. Eng. 2019, 38, 199–215. [Google Scholar] [CrossRef]
- Pandove, G.; Singh, M. Robust Repetitive Control Design for a Three-Phase Four Wire Shunt Active Power Filter. IEEE Trans. Ind. Inform. 2019, 15, 2810–2818. [Google Scholar] [CrossRef]
- Neto, R.C.; Neves, F.A.S.; de Souza, H.E.P. Complex nk + m repetitive controller applied to space vectors: Advantages and stability analysis. IEEE Trans. Power Electron. 2021, 9, 3573–3590. [Google Scholar] [CrossRef]
- Geng, H.; Zheng, Z.; Zou, T.; Chu, B.; Chandra, A. Fast Repetitive Control with Harmonic Correction Loops for Shunt Active Power Filter Applied in Weak Grid. IEEE Trans. Ind. Appl. 2019, 55, 3198–3206. [Google Scholar] [CrossRef]
- Chen, Z.; Zha, H.; Peng, K.; Yang, J.; Yan, J. A design method of optimal PID-based repetitive control systems. IEEE Access 2020, 8, 139625–139633. [Google Scholar] [CrossRef]
- Pan, G.; Gong, F.; Jin, L.; Wu, H.; Chen, S. LCL APF based on fractional-order fast repetitive control strategy. J. Power Electron. 2021, 21, 1508–1519. [Google Scholar] [CrossRef]
- Jian, L.; Li, X.; Zhu, J.; Hao, Z.; Li, F. Dual closed-loops current controller for a 4-leg shunt APF based on repetitive control. Int. J. Electron. 2019, 106, 349–364. [Google Scholar] [CrossRef]
- Escobar, G.; Hernandez-Gomez, M.; Valdez-Fernandez, A.A.; Lopez-Sanchez, M.J.; Catzin-Contreras, G.A. Implementation of a 6n ± 1 repetitive controller subject to fractional delays. IEEE Trans. Ind. Electron. 2015, 62, 444–452. [Google Scholar] [CrossRef]
- Yang, Y.; Zhou, K.; Blaabjerg, F. Enhancing the frequency adaptability of periodic current controllers with a fixed sampling rate for grid-connected power converters. IEEE Trans. Power Electron. 2016, 31, 7273–7285. [Google Scholar] [CrossRef]
- Zhao, Q.; Ye, Y. Fractional phase lead compensation RC for an inverter: Analysis, design, and verification. IEEE Trans. Ind. Electron. 2017, 64, 3127–3136. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, B.; Zhou, K. Universal fractional-order design of linear phase lead compensation multirate repetitive control for PWM inverters. IEEE Trans. Ind. Electron. 2017, 64, 7132–7140. [Google Scholar] [CrossRef]
- Zhao, Q.; Chen, S.; Wen, S.; Qu, B.; Ye, Y. A frequency adaptive PIMR-type repetitive control for a grid-tied inverter. IEEE Access 2018, 6, 65418–65428. [Google Scholar] [CrossRef]
- Zhu, M.; Ye, Y.; Xiong, Y.; Zhao, Q. Parameter robustness improvement for repetitive control in grid-tied inverters using an IIR filter. IEEE Trans. Power Electron. 2021, 36, 8454–8463. [Google Scholar] [CrossRef]
- Liu, T.; Wang, D.; Zhou, K. High-performance grid simulator using parallel structure fractional repetitive control. IEEE Trans. Power Electron. 2016, 31, 2669–2679. [Google Scholar] [CrossRef]
- Liu, T.; Wang, D. Parallel structure fractional repetitive control for PWM inverters. IEEE Trans. Ind. Electron. 2015, 62, 5045–5054. [Google Scholar] [CrossRef]
- Kolluri, S.; Gorla, N.B.Y.; Panda, S.K. Capacitor voltage ripple suppression in a modular multilevel converter using frequency-adaptive spatial repetitive-based circulating current controller. IEEE Trans. Power Electron. 2020, 35, 9839–9849. [Google Scholar] [CrossRef]
- Huo, X.; Wang, M.; Liu, K.-Z.; Tong, X. Attenuation of position-dependent periodic disturbance for rotary machines by improved spatial repetitive control with frequency alignment. IEEE-ASME Trans. Mechatron. 2020, 25, 339–348. [Google Scholar] [CrossRef]
- Kolluri, S.; Gorla, N.B.Y.; Sapkota, R.; Panda, S.K. A new control architecture with spatial comb filter and spatial repetitive controller for circulating current harmonics elimination in a droop-regulated modular multilevel converter for wind farm application. IEEE Trans. Power Electron. 2019, 34, 10509–10523. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, B.; Zhou, K.; Wang, J. Virtual variable sampling discrete fourier transform based selective odd-order harmonic repetitive control of DC/AC converters. IEEE Trans. Power Electron. 2018, 33, 6444–6452. [Google Scholar] [CrossRef]
- Liu, Z.; Zhou, K.; Yang, Y.; Wang, J.; Zhang, B. Frequency-adaptive virtual variable sampling-based selective harmonic repetitive control of power inverters. IEEE Trans. Ind. Electron. 2021, 68, 11339–11347. [Google Scholar] [CrossRef]
- Zhao, Q.; Ye, Y. A PIMR-Type Repetitive Control for a Grid-Tied Inverter: Structure, Analysis, and Design. IEEE Trans. Power Electron. 2018, 33, 2730–2739. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Values |
|---|---|---|
| Nonlinear load inductor | 4 mH | |
| Nonlinear load capacitor | 4400 F | |
| Nonlinear load resistance | R | 8 |
| Grid Voltage | V | |
| Equivalent grid-side inductance | 0.1 mH | |
| Inverter-side inductance | 3.5 mH | |
| Filter capacitor | 7 F | |
| Passive damping | 10 | |
| Sampling frequency | 10 kHz | |
| Grid frequency | 50 Hz | |
| DC bus capacitor | C | 2200 F |
| DC bus voltage | 250 V |
| 49 Hz | 49.5 Hz | |
|---|---|---|
| CRC | 7.53% | 4.73% |
| IMFA-VVS-RC | 2.43% | 2.51% |
| 50 Hz | ||
| CRC | 2.02% | |
| IMFA-VVS-RC | 2.81% | |
| 50.5 Hz | 51 Hz | |
| CRC | 4.51% | 7.72% |
| IMFA-VVS-RC | 2.50% | 2.84% |
| 49 Hz | 49.5 Hz | 50 Hz | 50.5 Hz | 51 Hz |
|---|---|---|---|---|
| 41.05% | 40.8% | 40.62% | 40.41% | 40.2% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, D.; Li, B.; Huang, S.; Liu, L.; Wang, H.; Huang, Y. An Improved Frequency-Adaptive Virtual Variable Sampling-Based Repetitive Control for an Active Power Filter. Energies 2022, 15, 7227. https://doi.org/10.3390/en15197227
Liu D, Li B, Huang S, Liu L, Wang H, Huang Y. An Improved Frequency-Adaptive Virtual Variable Sampling-Based Repetitive Control for an Active Power Filter. Energies. 2022; 15(19):7227. https://doi.org/10.3390/en15197227
Chicago/Turabian StyleLiu, Dong, Baojin Li, Songtao Huang, Linguo Liu, Haozhe Wang, and Yukai Huang. 2022. "An Improved Frequency-Adaptive Virtual Variable Sampling-Based Repetitive Control for an Active Power Filter" Energies 15, no. 19: 7227. https://doi.org/10.3390/en15197227
APA StyleLiu, D., Li, B., Huang, S., Liu, L., Wang, H., & Huang, Y. (2022). An Improved Frequency-Adaptive Virtual Variable Sampling-Based Repetitive Control for an Active Power Filter. Energies, 15(19), 7227. https://doi.org/10.3390/en15197227