
A Novel Dynamic Event-Triggered Mechanism for Distributed Secondary Control in Islanded AC Microgrids



Abstract
:1. Introduction
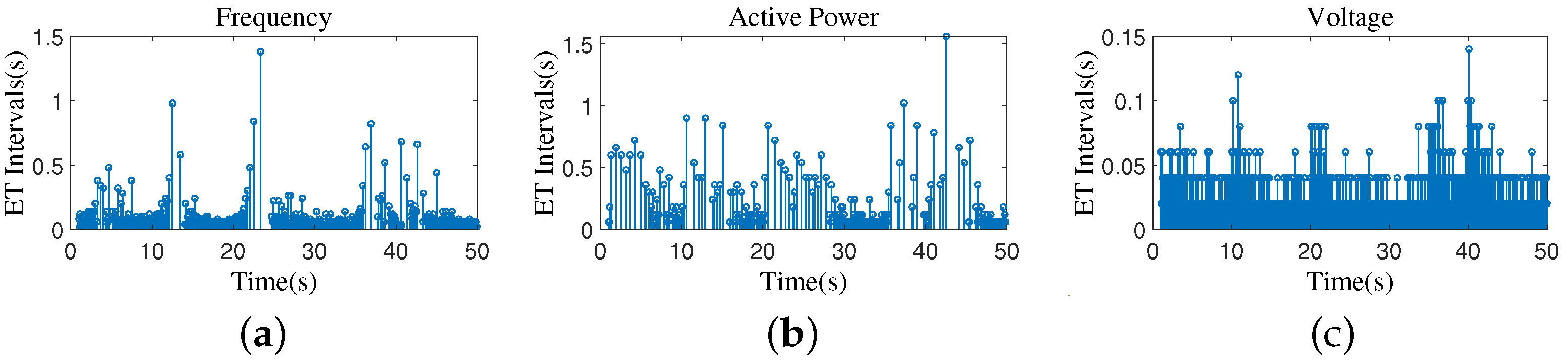
- The secondary control problem is addressed under the DPET control structure, which further reduces the communication burden, and fundamentally avoids Zeno behavior and the continuous monitoring of ETCs.
- By introducing adaptive coefficients related to system deviation, the proposed control scheme can take into account both the communication burden and the control performance.
2. Preliminaries and Problem Formulation
2.1. Graph Theory
2.2. AC MG System and Primary Droop Control
2.3. Problem Formulation
3. Distributed DPET Secondary Control Design
3.1. Distributed DPET Frequency and Active Power Controllers
3.2. Distributed DPET Voltage and Reactive Power Controllers
4. Simulation Results
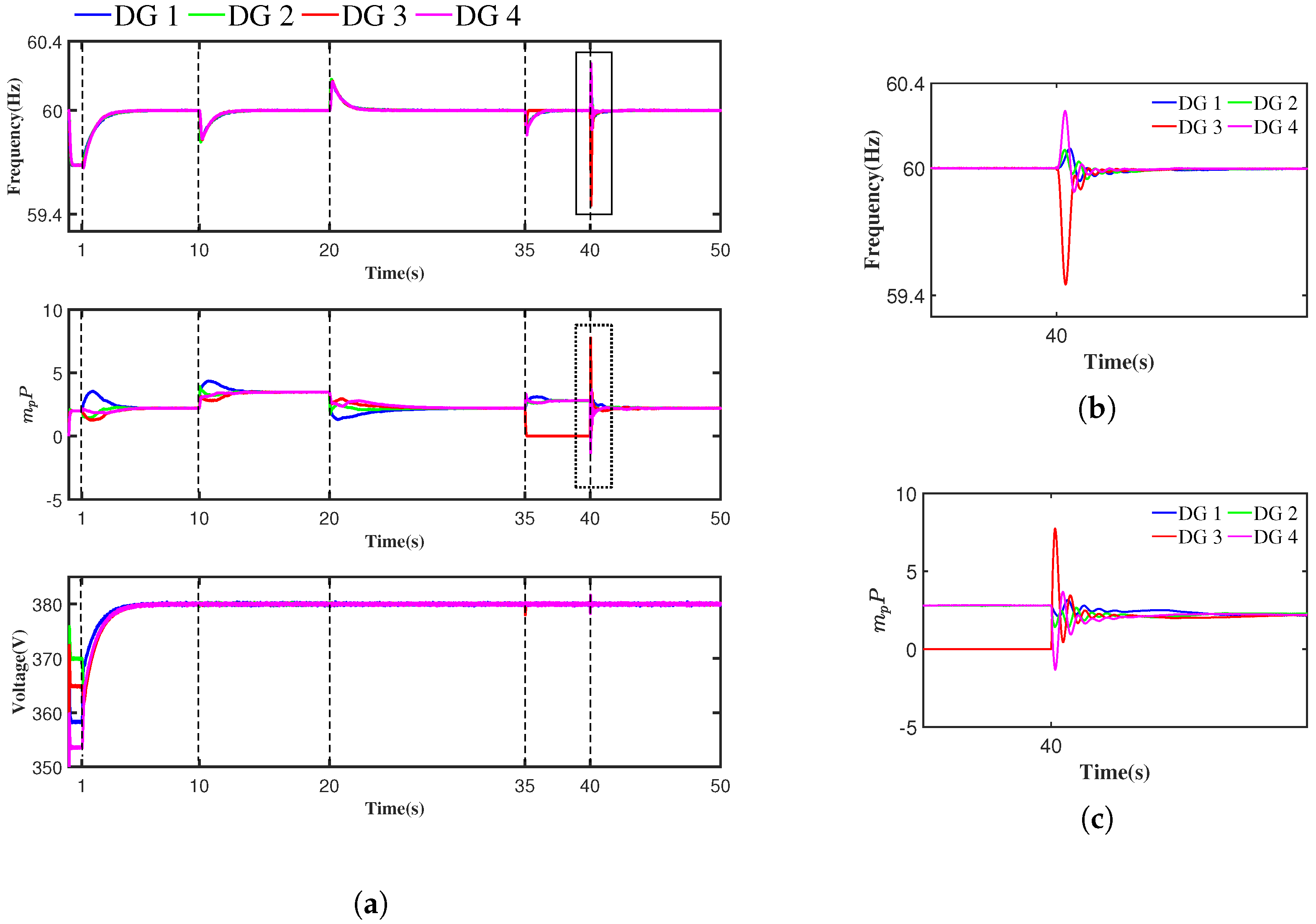
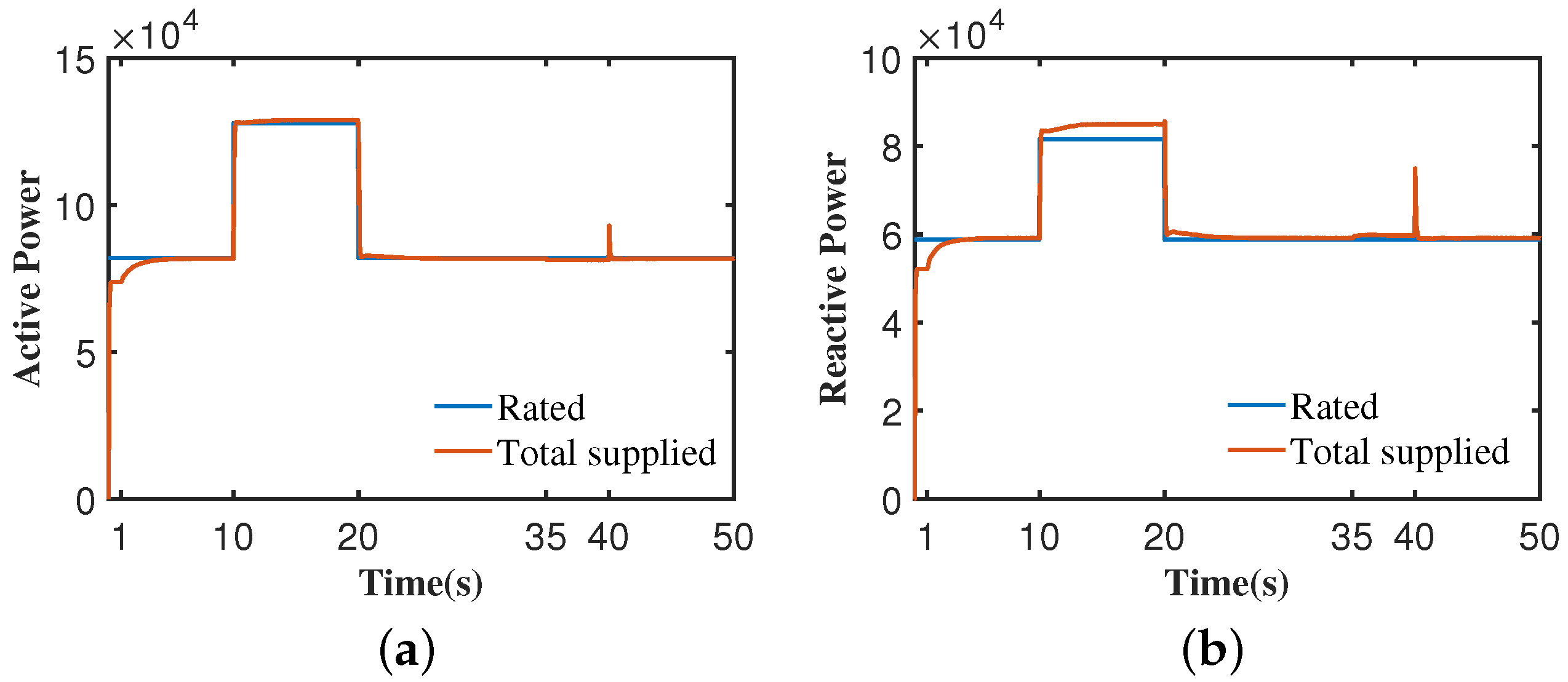
4.1. Case Studies
- Case 1: At s, the secondary control is activated.
- Case 2: At s, load 3 is connected to the MG.
- Case 3: At s, load 3 is disconnected. The communication link between DG 1 and DG 4 fails at s and restores at s.
- Case 4: At s, DG 3 is disconnected from the MG.
- Case 5: At s, DG 3 is connected to the MG.
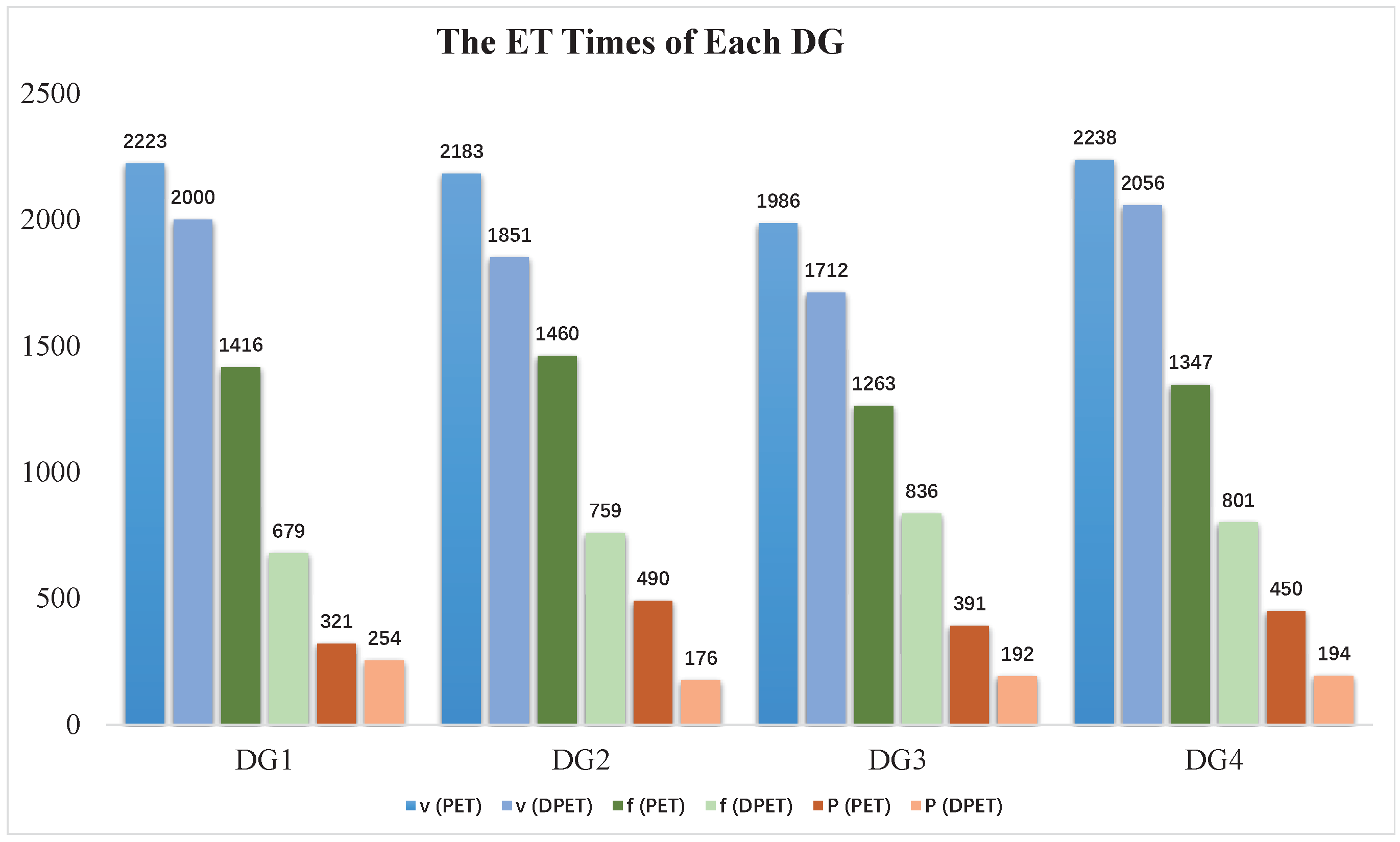
4.2. Comparisons
4.3. Performance under Communication Delay
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hatziargyriou, N.; Asano, H.; Iravani, R.; Marnay, C. Microgrids. IEEE Power Energy Mag. 2007, 5, 78–94. [Google Scholar] [CrossRef]
- Razmi, D.; Lu, T. A Literature Review of the Control Challenges of Distributed Energy Resources Based on Microgrids (MGs): Past, Present and Future. Energies 2022, 15, 4676. [Google Scholar] [CrossRef]
- Kim, B.Y.; Oh, K.K.; Moore, K.L.; Ahn, H.S. Distributed coordination and control of multiple photovoltaic generators for power distribution in a microgrid. Automatica 2016, 73, 193–199. [Google Scholar] [CrossRef]
- Bidram, A.; Davoudi, A. Hierarchical Structure of Microgrids Control System. IEEE Trans. Smart Grid 2012, 3, 1963–1976. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Fax, J.A.; Murray, R.M. Consensus and Cooperation in Networked Multi-Agent Systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef]
- Bidram, A.; Davoudi, A.; Lewis, F.L.; Guerrero, J.M. Distributed Cooperative Secondary Control of Microgrids Using Feedback Linearization. IEEE Trans. Power Syst. 2013, 28, 3462–3470. [Google Scholar] [CrossRef]
- Bidram, A.; Davoudi, A.; Lewis, F.L.; Qu, Z. Secondary control of microgrids based on distributed cooperative control of multi-agent systems. IET Gener. Transm. Distrib. 2013, 7, 822–831. [Google Scholar] [CrossRef]
- Ullah, S.; Khan, L.; Sami, I.; Ullah, N. Consensus-Based Delay-Tolerant Distributed Secondary Control Strategy for Droop Controlled AC Microgrids. IEEE Access 2021, 9, 6033–6049. [Google Scholar] [CrossRef]
- Lu, X.; Xia, S.; Sun, G.; Hu, J.; Zou, W.; Zhou, Q.; Shahidehpour, M.; Chan, K.W. Hierarchical distributed control approach for multiple on-site DERs coordinated operation in microgrid. Int. J. Electr. Power Energy Syst. 2021, 129, 106864. [Google Scholar] [CrossRef]
- Pullaguram, D.; Rana, R.; Mishra, S.; Senroy, N. Fully distributed hierarchical control strategy for multi-inverter-based AC microgrids. IET Renew. Power Gener. 2020, 14, 2468–2476. [Google Scholar] [CrossRef]
- Nguyen, T.L.; Wang, Y.; Tran, Q.T.; Caire, R.; Xu, Y.; Gavriluta, C. A Distributed Hierarchical Control Framework in Islanded Microgrids and Its Agent-Based Design for Cyber–Physical Implementations. IEEE Trans. Ind. Electron. 2021, 68, 9685–9695. [Google Scholar] [CrossRef]
- Girard, A. Dynamic Triggering Mechanisms for Event-Triggered Control. IEEE Trans. Autom. Control 2015, 60, 1992–1997. [Google Scholar] [CrossRef]
- Ge, X.; Han, Q.L.; Ding, L.; Wang, Y.L.; Zhang, X.M. Dynamic Event-Triggered Distributed Coordination Control and its Applications: A Survey of Trends and Techniques. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 3112–3125. [Google Scholar] [CrossRef]
- Dimarogonas, D.V.; Frazzoli, E.; Johansson, K.H. Distributed Event-Triggered Control for Multi-Agent Systems. IEEE Trans. Autom. Control 2012, 57, 1291–1297. [Google Scholar] [CrossRef]
- Yang, C.; Yao, W.; Fang, J.; Ai, X.; Chen, Z.; Wen, J.; He, H. Dynamic event-triggered robust secondary frequency control for islanded AC microgrid. Appl. Energy 2019, 242, 821–836. [Google Scholar] [CrossRef]
- Qian, Y.Y.; Premakumar, A.V.P.; Wan, Y.; Lin, Z.; Shamash, Y.A.; Davoudi, A. Dynamic Event-Triggered Distributed Secondary Control of DC Microgrids. IEEE Trans. Power Electron. 2022, 37, 10226–10238. [Google Scholar] [CrossRef]
- Han, F.; Lao, X.; Li, J.; Wang, M.; Dong, H. Dynamic event-triggered protocol-based distributed secondary control for islanded microgrids. Int. J. Electr. Power Energy Syst. 2022, 137, 107723. [Google Scholar] [CrossRef]
- Heemels, W.P.M.H.; Donkers, M.C.F.; Teel, A.R. Periodic Event-Triggered Control for Linear Systems. IEEE Trans. Autom. Control 2013, 58, 847–861. [Google Scholar] [CrossRef]
- Deng, C.; Che, W.W.; Wu, Z.G. A Dynamic Periodic Event-Triggered Approach to Consensus of Heterogeneous Linear Multiagent Systems with Time-Varying Communication Delays. IEEE Trans. Cybern. 2021, 51, 1812–1821. [Google Scholar] [CrossRef]
- Geng, Y.; Ji, J.; Hu, B. The Output Consensus Problem of DC Microgrids With Dynamic Event-Triggered Control Scheme. Front. Energy Res. 2021, 9, 446. [Google Scholar] [CrossRef]
- Lian, Z.; Deng, C.; Wen, C.; Guo, F.; Lin, P.; Jiang, W. Distributed Event-Triggered Control for Frequency Restoration and Active Power Allocation in Microgrids With Varying Communication Time Delays. IEEE Trans. Ind. Electron. 2021, 68, 8367–8378. [Google Scholar] [CrossRef]
- Barooah, P.; Hespanha, J.P. Graph Effective Resistance and Distributed Control: Spectral Properties and Applications. In Proceedings of the Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 3479–3485. [Google Scholar] [CrossRef]
- Li, Z.; Cheng, Z.; Si, J.; Li, S. Distributed Event-Triggered Hierarchical Control to Improve Economic Operation of Hybrid AC/DC Microgrids. IEEE Trans. Power Syst. 2022, 37, 3653–3668. [Google Scholar] [CrossRef]
- Ullah, S.; Khan, L.; Sami, I.; Ro, J.S. Voltage/Frequency Regulation With Optimal Load Dispatch in Microgrids Using SMC Based Distributed Cooperative Control. IEEE Access 2022, 10, 64873–64889. [Google Scholar] [CrossRef]
- Li, Z.; Cheng, Z.; Liang, J.; Si, J.; Dong, L.; Li, S. Distributed Event-Triggered Secondary Control for Economic Dispatch and Frequency Restoration Control of Droop-Controlled AC Microgrids. IEEE Trans. Sustain. Energy 2020, 11, 1938–1950. [Google Scholar] [CrossRef]
- Ullah, S.; Khan, L.; Sami, I.; Hafeez, G.; Albogamy, F.R. A Distributed Hierarchical Control Framework for Economic Dispatch and Frequency Regulation of Autonomous AC Microgrids. Energies 2021, 14, 8408. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DGs | Mp | Np | Rf () | Lf (mH) | Cf (F) |
|---|---|---|---|---|---|
| DG1 and 2 | 50 | ||||
| DG3 and 4 | 50 | ||||
| Lines | Lines 12 and 34 | line 23 | Loads | Loads 1 and 3 | Load 2 |
| Rt () | P (kW) | 36 | |||
| Lt (mH) | Q (kVar) | 36 | |||
| Controller | |||||
| Frequency | 5 | 1 | |||
| Voltage | 5 | 1 | |||
| Active power | 1 | - | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, B.; Xiao, Y.; Jin, X.; Feng, J.; Li, X.; Ding, L. A Novel Dynamic Event-Triggered Mechanism for Distributed Secondary Control in Islanded AC Microgrids. Energies 2022, 15, 6883. https://doi.org/10.3390/en15196883
Huang B, Xiao Y, Jin X, Feng J, Li X, Ding L. A Novel Dynamic Event-Triggered Mechanism for Distributed Secondary Control in Islanded AC Microgrids. Energies. 2022; 15(19):6883. https://doi.org/10.3390/en15196883
Chicago/Turabian StyleHuang, Boyang, Yong Xiao, Xin Jin, Junhao Feng, Xin Li, and Li Ding. 2022. "A Novel Dynamic Event-Triggered Mechanism for Distributed Secondary Control in Islanded AC Microgrids" Energies 15, no. 19: 6883. https://doi.org/10.3390/en15196883
APA StyleHuang, B., Xiao, Y., Jin, X., Feng, J., Li, X., & Ding, L. (2022). A Novel Dynamic Event-Triggered Mechanism for Distributed Secondary Control in Islanded AC Microgrids. Energies, 15(19), 6883. https://doi.org/10.3390/en15196883