


Electrical Generators for Large Wind Turbine: Trends and Challenges


Abstract
:1. Introduction
2. Historical Background and Wind Turbine Technologies
2.1. Wind Power
- Region I: when the wind speed is less than the threshold speed, the torque is insufficient to overcome the power loss (i.e., losses due to drag at the blade, friction losses in the gearbox and in bearings, electrical losses with the generator); as a consequence, no power is generated below the cut-in speed.
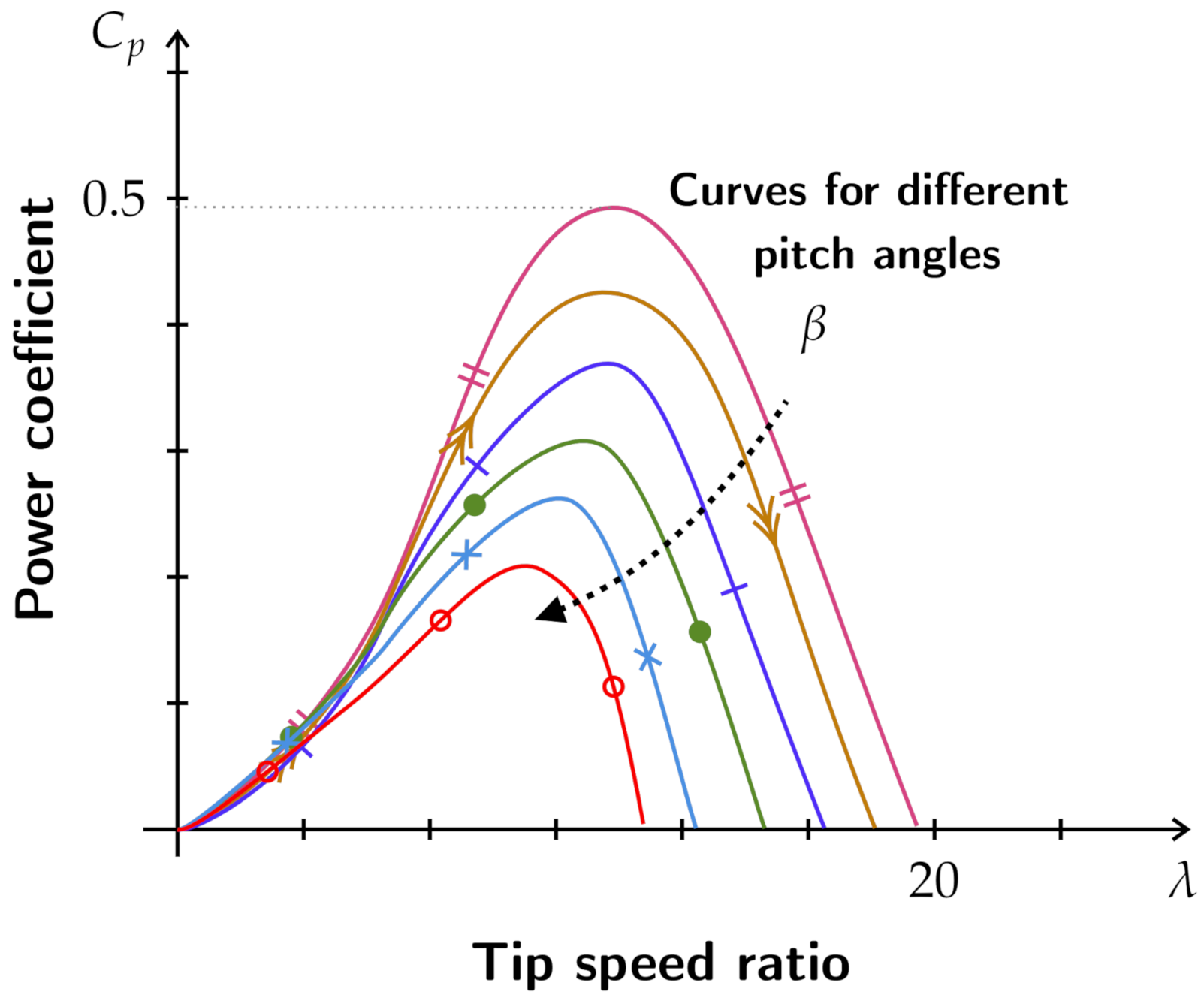
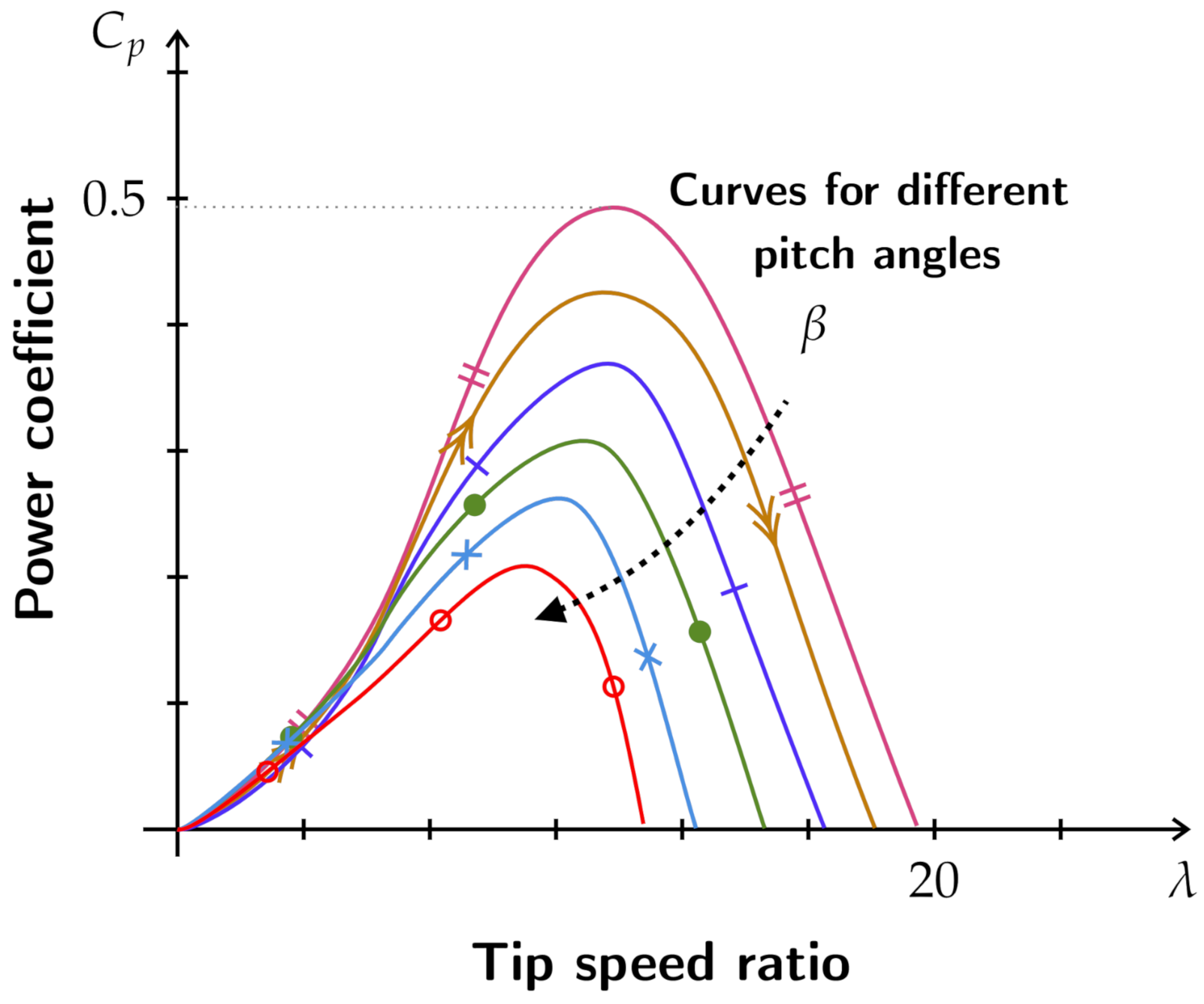
- Region II: (variable speed region) when the wind speed exceeds the cut-in speed (around 3–5 m/s depending the turbine design), there is a sufficient torque for rotation; thus, the turbine starts to generate electricity. In this operational mode, which accounted for more than 50% of the yearly energy capture for a typical modern wind turbine [24], the power produced by the wind turbine increases proportionally to the cubic power of the wind speed (as is expected from (1)). The power curve reaches a peak around the so-called rated output speed (12–14 m/s). Above the rated output speed, the power generated remains unchanged at its permanently permissible maximum (known as rated power); it is kept almost constant by different control options. The pitch angle is usually controlled to keep the wind turbine operating at the peak of the –TSR–pitch surface [24] and to limit the power when the speed exceeded the rated wind speed to avoid structural failure [25].
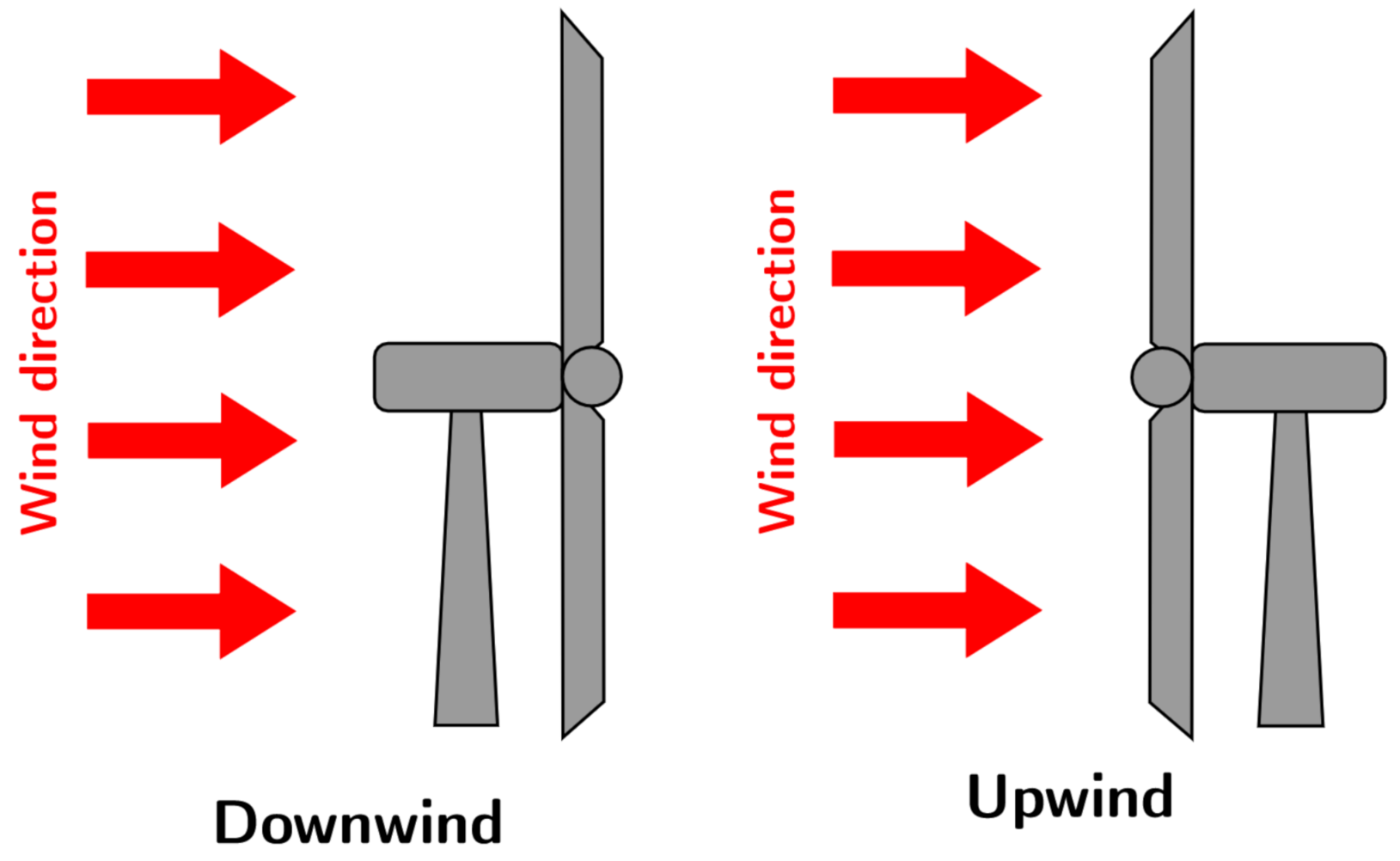
- Region III: (constant speed region) at which the wind speed is between rated speed and cut out speed (around 25 m/s). The rotor speed is held constant above the rated speed by the regulation of the angle of attack (See Figure 2). This ensures limited aerodynamic power in this region despite much more available wind energy.
- Region VI: When the wind speed exceeds the cut-out speed, the wind turbine is shut down.
2.2. Historical Background
3. Global Wind Energy Development
3.1. Global Market Status
3.2. Offshore Wind Turbine Technology
3.3. Large Wind Turbine
3.3.1. Motivation for Large Wind Turbine
3.3.2. Global Market Status
3.3.3. Challenges for Large Wind Turbines (Key Issues in Design of Large Wind Turbine)
- INNWIND (Alumni), vision: High-performance innovative design of a beyond-state-of-the-art 10–20 MW offshore wind turbine and hardware demonstrators of some of the critical components [63].
- SUMR (Segmented Ultralight Morphing Rotor), mission: to conceptualize, design and demonstrate morphing technologies for 50 megawatt wind turbines that can reduce the offshore levelized cost of energy by as much as 50% by 2025 [66].
- HiPRWind (High Power, High Reliability Offshore Wind Technology), the project aims to unlock new deep-water areas for wind power by enabling research on floating systems (megawatt scale) [67].
- COREWIND, the project aims to achieve significant cost reductions and enhance the performance of floating wind technology through the optimization of mooring/anchoring systems and dynamic cables [68].
- FLOTANT aims to develop an innovative and integrated Floating Offshore Wind solution optimized for deep waters (100–600 m) capable of hosting a 10 MW wind turbine generator [69].
3.3.4. Manufactures of Operational Large Wind Turbine
3.4. Large Wind Turbine Drive Train Technology
4. Indirect Drive Wind Turbine (High-Speed Generators)
4.1. Single Fed SFIG
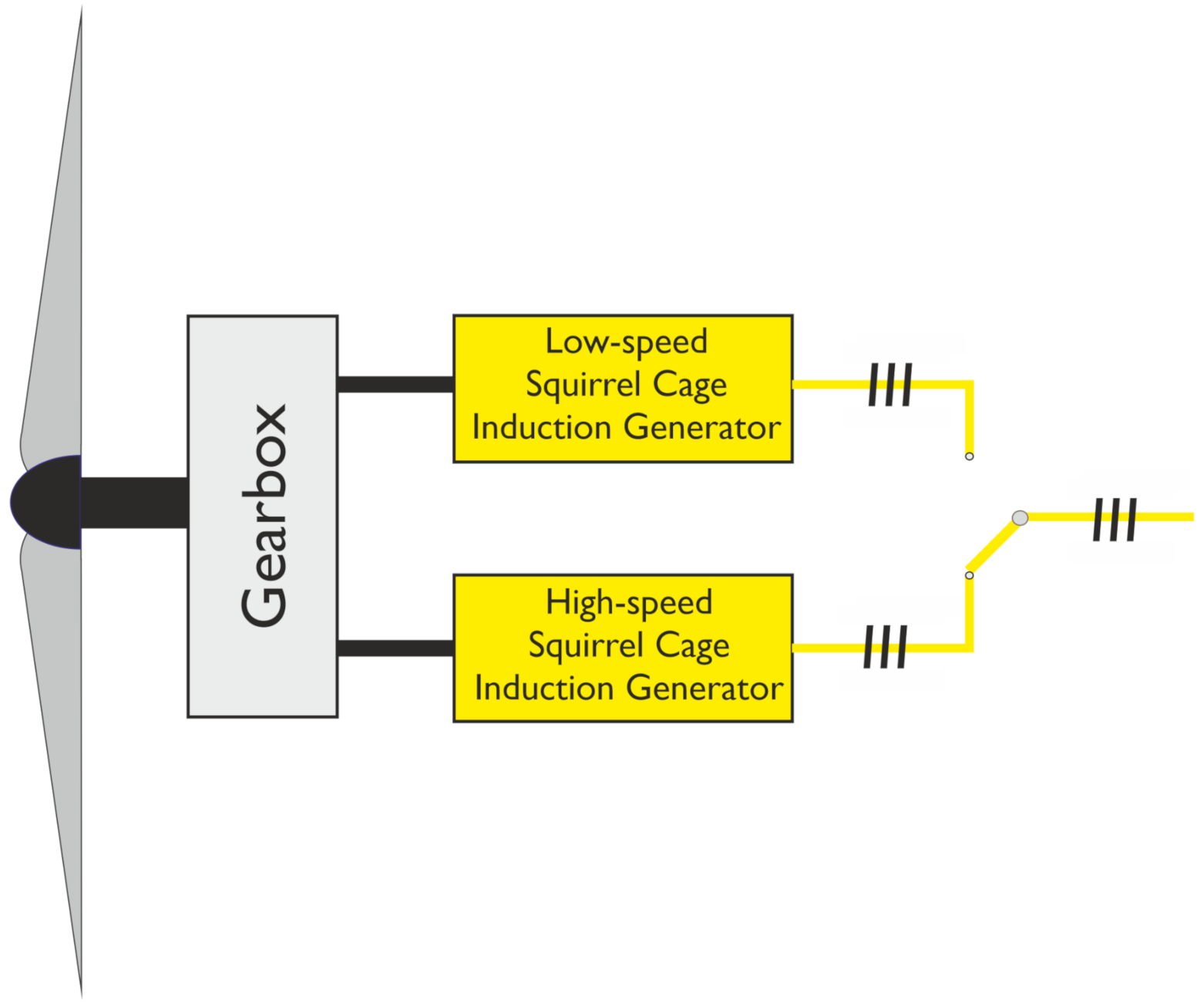
4.1.1. Fixed Speed Concept
- Bonus 82 (2.3 MW) and Bonus 76 (2 MW) by Bonus (Siemens) were widely installed in wind farms.
- NM72/2000 (2 MW) by Neg Micon (now Vestas) was installed in some wind farms in Denmark and Sweden.
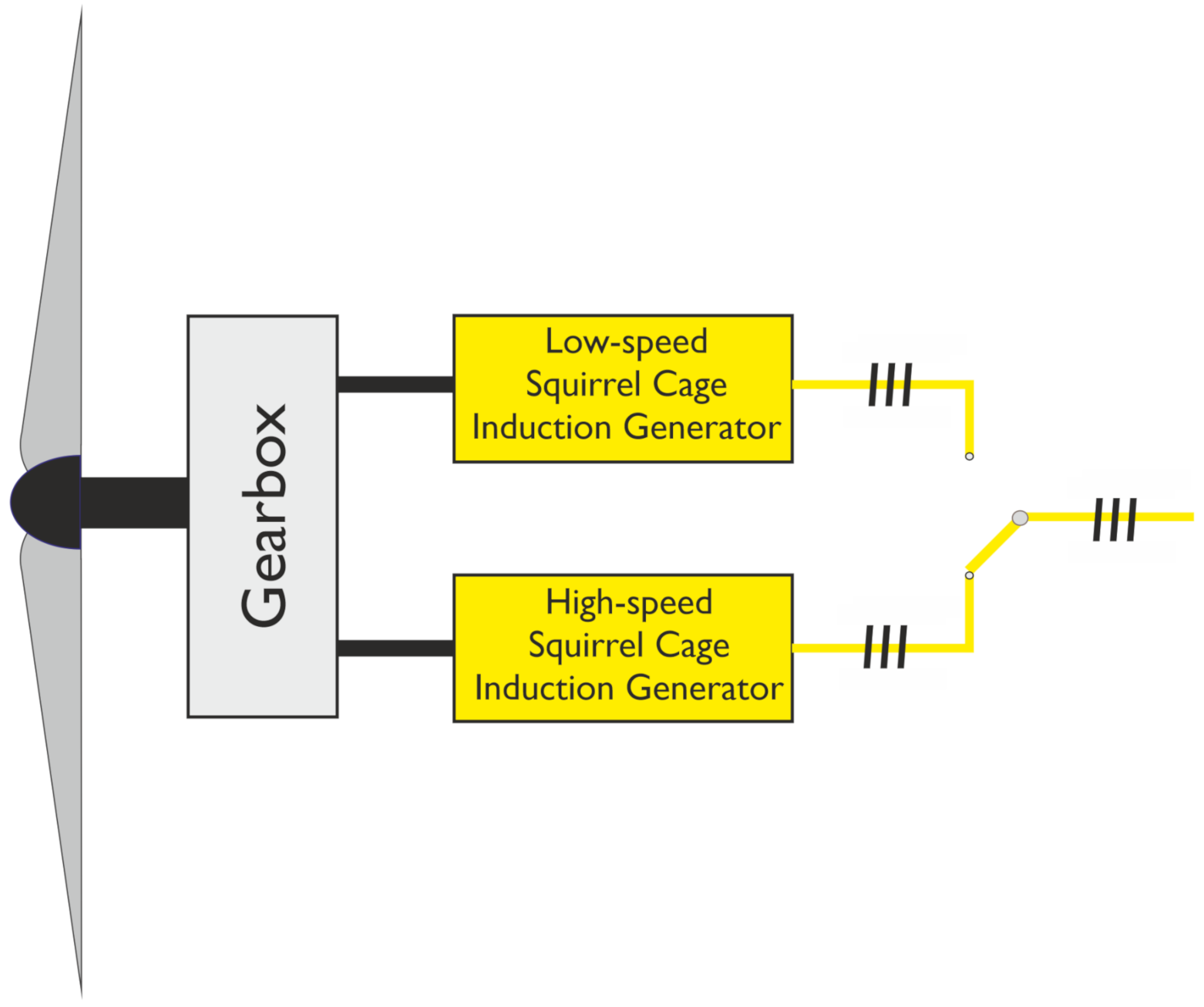
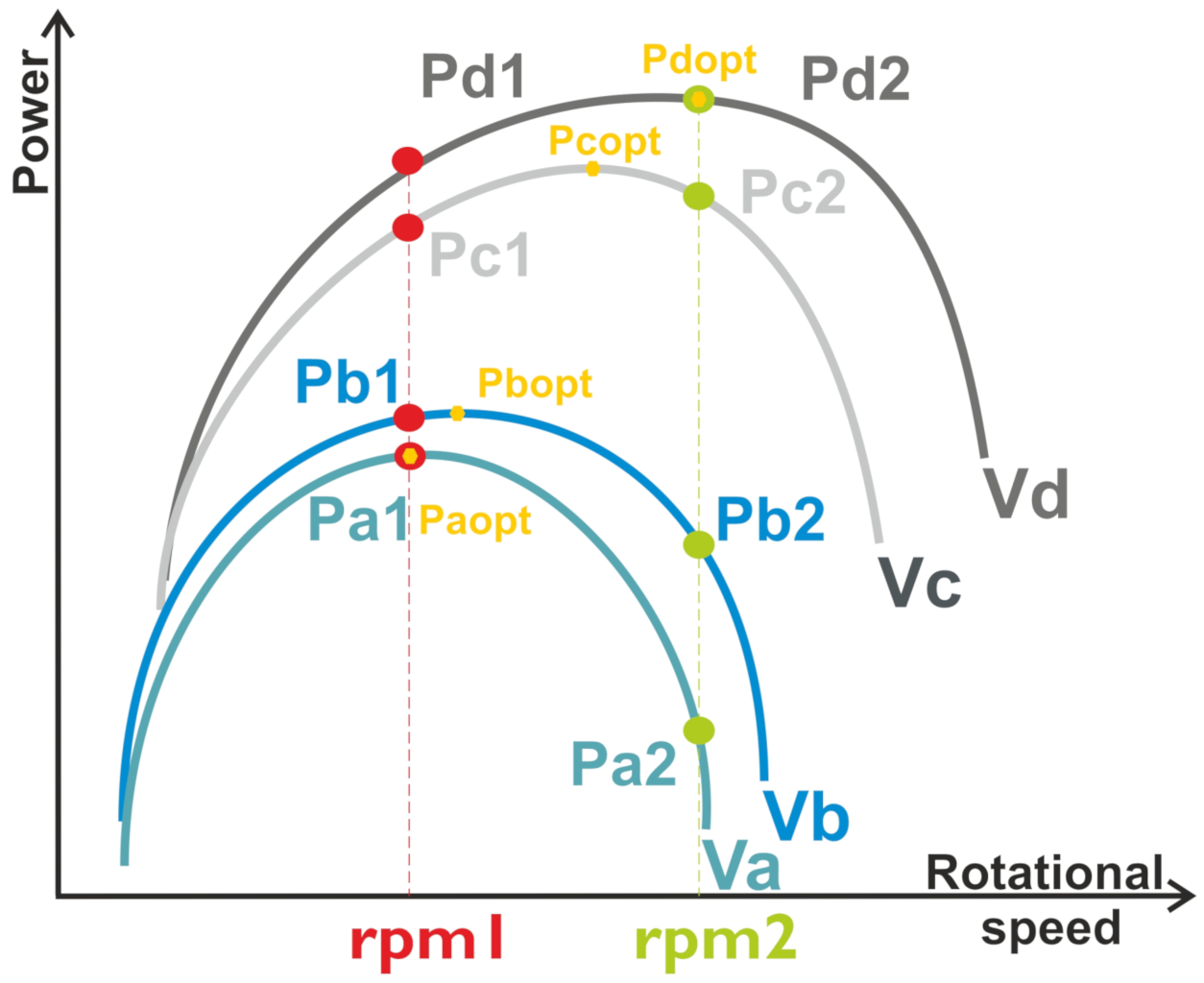
- Operate with maximum efficiency just four unique speed wind velocities on the turbine’s power curve [76], so the wind turbine is usually operating off its optimum.
- Conversion efficiency cannot be optimized, just slight variations of the rotor shaft speed is allowed.
- Low efficiency and reliability due to the presence of the gearbox.
4.1.2. Semi-Variable Speed Concept
- SWT-4.0-130 (4 MW) by Siemens Gamesa (Squirrel cage asynchronous generator with 3-stages gearbox).
- G80-1.8 (1.8 MW) by Siemens Gamesa.
4.1.3. Variable Speed Concept (with Full Scale Frequency Converter)
4.2. Doubly Fed Induction Generator DFIG (Variable Speed Wind Turbine with Partial Scale Frequency Converter Concept)
- Decoupled active and reactive output power control (due to the use of flux-vector control of the rotor current).
- Enhance the aerodynamic efficiency over a range of wind speeds compared to the fixed speed concept.
- Soft starter and reactive power compensator.
- Only a part of the power goes through the converter, and hence, a small/cheap converter (with lower losses) is needed.
- Lower losses mainly due to the reduction on the stator losses (the stator current is nearly 30% lower) since only two-thirds of the rated power pass through the stator.
- Less variation in the power output.
- Regular maintenance, audible noise and heat dissipation due to the presence of the gearbox.
- Complex converter control [85].
- Limited speed variation.
- Higher maintenance costs due to the presence of slip rings and brushes (the average life time of DFIG brushes is 6–12 months).
- High overall wind turbine cost due to the use of the gearbox (including both manufacturing and regular maintenance cost).
5. Direct-Drive Wind Turbine (Low Speed Generators)
5.1. Advantages of Direct-Drive Wind Turbine
5.2. Proposed Generator Types for Direct-Drive Wind Turbine
5.2.1. Direct-Drive Electrically Excited Synchronous Generator (DD-EESG)
5.2.2. Direct-Drive Permanent Magnet Synchronous Generator (DD-PMSG)
- Radial Flux Permanent Magnet Synchronous Generators (RF-PMSGs) Due to economic consideration, the RF-PMSG, with a surface-mounted permanent magnet, is the most common commercialized topology for direct-drive multi-megawatt wind turbines [96,116], and it is also the most mature technology in terms of manufacturing process. This topology offers not only robust design but also structural stability [117]. In an RF machine, while the magnetic flux flows radially, the current flows axially. The global leader of offshore wind turbine, Siemens, has already commercialized many DD-RF-PMSG large wind turbines such as SG 11.0-200 DD (11 MW) and have at present 14 MW DD-RF-PMSG under development. In addition, in the current year, the DNV-GL certified the Haliade-X 12 MW GE (Figure 12) offshore wind turbine with RFPM (Table 6). It has shown a high capacity factor of 60–64% [57] and high performance in terms of reliability and efficiency. Different configurations of RF-PMSG have been discussed in the literature.Figure 12. Haliade-X 12 MW nacelle (courtesy of GE) [57].Figure 12. Haliade-X 12 MW nacelle (courtesy of GE) [57].
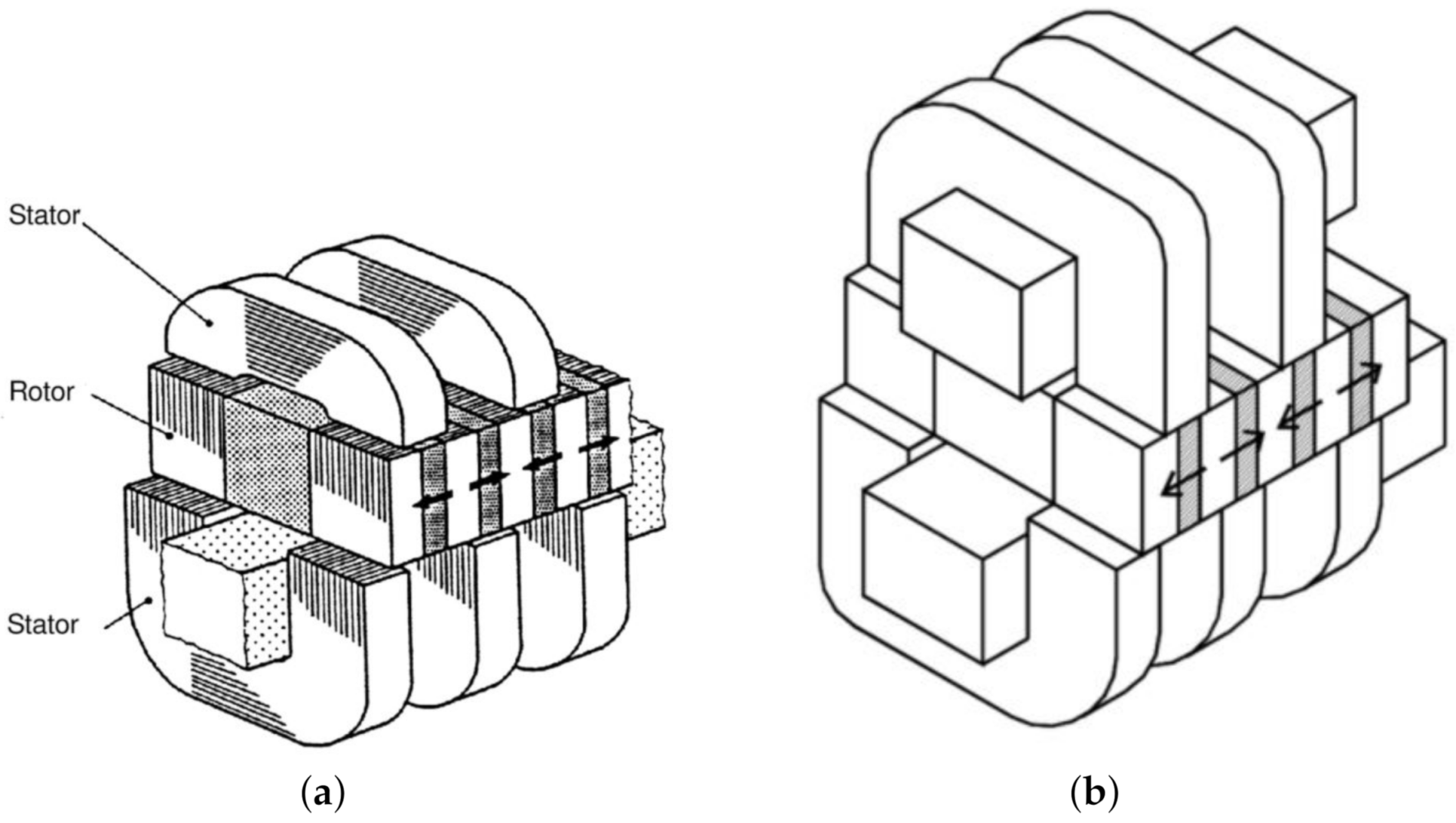
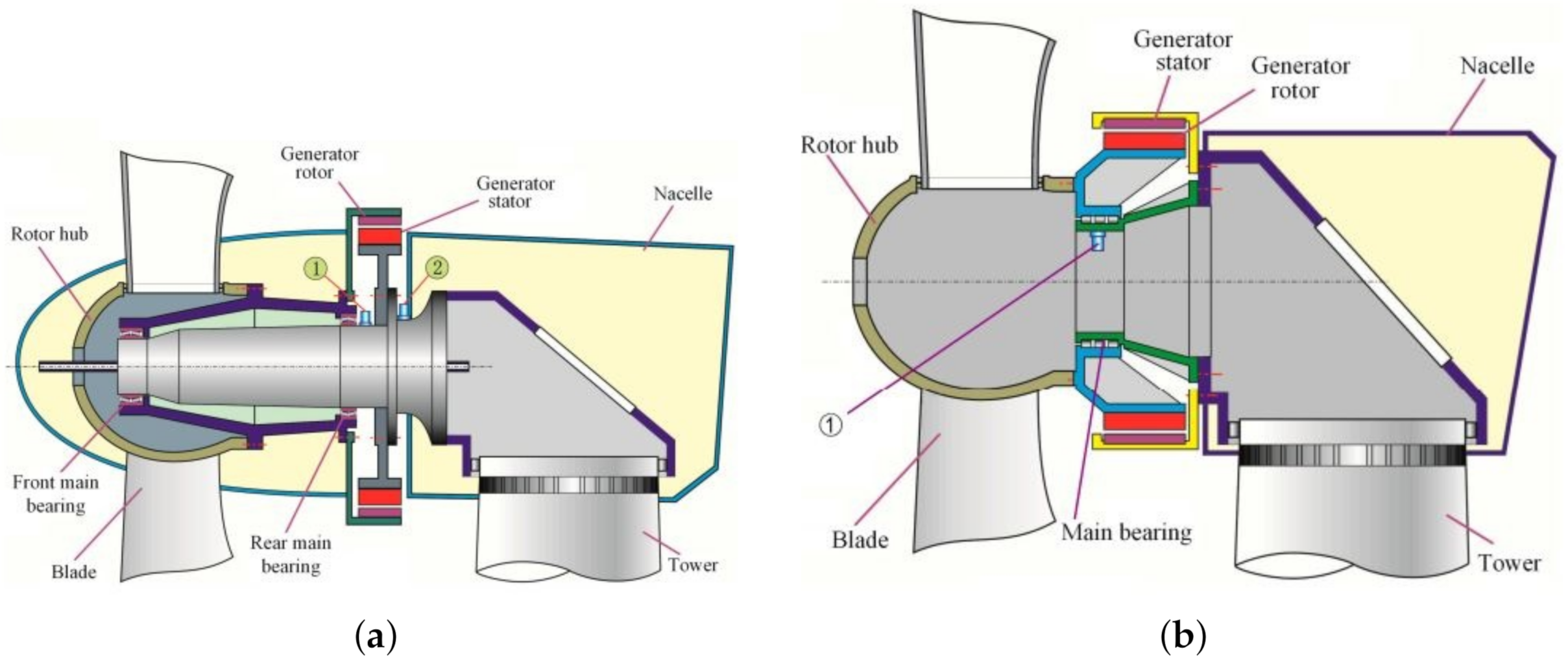
![Energies 15 06700 g012]() The RF machine may be divided into many categories based on the placement of the permanent magnet, the rotor design, the rotor position, the stator core and the winding distribution. The permanent magnet can be surface mounted, inserted or buried. In a surface-mounted PMSG, the permanent magnets are glued to the surface of the rotor; however, to provide acceptable flux density in the airgap, it is necessary to use high-energy magnets (e.g., Alnico, NbFeB), while in buried PMSG with flux concentration, the flux density in the airgap is higher than the remanent flux density of the permanent magnet. Equations (5) and (6) give an estimation of airgap’s flux density for a surface-mounted PMSG, and for a concentration flux PMSG (neglecting the effects of stator slots and leakage within the rotor), , respectively [118]. Notice that in order to have the usual range of induction in large machines (0.8 T–1.1 T), the remanence flux density should be at least for the surface-mounted topology, whereas for the flux concentration PMSG, with convenient choice of the permanent magnet dimensions, it is possible to have high flux density with a low-cost permanent magnet such as ferrite (with [0.20–0.46] T ).where is the permanent magnet remanence, e is the airgap thickness, is the magnet thickness, is rotor yoke thickness, is the magnet height, and is the magnet permeability.Although a low-cost magnet may be used in such a structure, no mass reduction is expected. In fact, due to the need for a large amount of weak magnets (such as ferrit), the machine mass will increase. Thus, no mass saving is expected with this geometry. Buried and concentrated flux rotors of PMSGs offer a better retainment of the magnets, which is an attractive point in high-speed applications; meanwhile, in a gearless wind turbine, PMSG operates at low speeds, so the centrifugal force is not a big concern. Regarding the cost and the better retainment of the magnets, the machine is heavy and with complex manufacturing issues (burying magnets) [117]. Next, in insert surface-mounted and buried configurations, the high-flux leakage is high, which might reduce the power factor and the efficiency of the machine. That is why the insert and buried PMSG are not common in direct-drive wind application. However, to reduce the effect of the leakage flux, an additional magnet could be added to the rotor [119]. A comparative study has been conducted in [14] for a 6 MW DD-PMSG. The results show that flux-concentrating ferrite PMSG weighs (considering the active and the structural mass) nearly twice as much as surface-mounted NdFeB PMSG. Even if the price of the NdFeB magnets was to double, the latter allows significant energy cost savings compared to flux-concentrating ferrite PMSG.The stator surrounds the rotor in conventional electric machines; however, in outer-rotor RF-PMSGs, the rotor is on the outside of the generator. Then, for the same machine’s external diameter, the outer-rotor configuration offers a higher rotor radius compared to the stator one, and thus, a higher number of poles is allowed. In addition, in this configuration, the centrifugal force exerts pressure on the rotor core, thus acting in a way that prevented the magnet detachment (in the case of the inner circumference placed permanent magnet) [120]. Afterwards, the outer rotor placed in contact to the wind improved the cooling of the magnet, thus decreasing the risk of demagnetization. The drive train can be shorted by integrating the outer rotor of the generator to the hub (see Figure 13).Figure 13. Comparison of wind turbine rotor concepts [121]. (a) External rotor. (b) Internal rotor.Figure 13. Comparison of wind turbine rotor concepts [121]. (a) External rotor. (b) Internal rotor.
The RF machine may be divided into many categories based on the placement of the permanent magnet, the rotor design, the rotor position, the stator core and the winding distribution. The permanent magnet can be surface mounted, inserted or buried. In a surface-mounted PMSG, the permanent magnets are glued to the surface of the rotor; however, to provide acceptable flux density in the airgap, it is necessary to use high-energy magnets (e.g., Alnico, NbFeB), while in buried PMSG with flux concentration, the flux density in the airgap is higher than the remanent flux density of the permanent magnet. Equations (5) and (6) give an estimation of airgap’s flux density for a surface-mounted PMSG, and for a concentration flux PMSG (neglecting the effects of stator slots and leakage within the rotor), , respectively [118]. Notice that in order to have the usual range of induction in large machines (0.8 T–1.1 T), the remanence flux density should be at least for the surface-mounted topology, whereas for the flux concentration PMSG, with convenient choice of the permanent magnet dimensions, it is possible to have high flux density with a low-cost permanent magnet such as ferrite (with [0.20–0.46] T ).where is the permanent magnet remanence, e is the airgap thickness, is the magnet thickness, is rotor yoke thickness, is the magnet height, and is the magnet permeability.Although a low-cost magnet may be used in such a structure, no mass reduction is expected. In fact, due to the need for a large amount of weak magnets (such as ferrit), the machine mass will increase. Thus, no mass saving is expected with this geometry. Buried and concentrated flux rotors of PMSGs offer a better retainment of the magnets, which is an attractive point in high-speed applications; meanwhile, in a gearless wind turbine, PMSG operates at low speeds, so the centrifugal force is not a big concern. Regarding the cost and the better retainment of the magnets, the machine is heavy and with complex manufacturing issues (burying magnets) [117]. Next, in insert surface-mounted and buried configurations, the high-flux leakage is high, which might reduce the power factor and the efficiency of the machine. That is why the insert and buried PMSG are not common in direct-drive wind application. However, to reduce the effect of the leakage flux, an additional magnet could be added to the rotor [119]. A comparative study has been conducted in [14] for a 6 MW DD-PMSG. The results show that flux-concentrating ferrite PMSG weighs (considering the active and the structural mass) nearly twice as much as surface-mounted NdFeB PMSG. Even if the price of the NdFeB magnets was to double, the latter allows significant energy cost savings compared to flux-concentrating ferrite PMSG.The stator surrounds the rotor in conventional electric machines; however, in outer-rotor RF-PMSGs, the rotor is on the outside of the generator. Then, for the same machine’s external diameter, the outer-rotor configuration offers a higher rotor radius compared to the stator one, and thus, a higher number of poles is allowed. In addition, in this configuration, the centrifugal force exerts pressure on the rotor core, thus acting in a way that prevented the magnet detachment (in the case of the inner circumference placed permanent magnet) [120]. Afterwards, the outer rotor placed in contact to the wind improved the cooling of the magnet, thus decreasing the risk of demagnetization. The drive train can be shorted by integrating the outer rotor of the generator to the hub (see Figure 13).Figure 13. Comparison of wind turbine rotor concepts [121]. (a) External rotor. (b) Internal rotor.Figure 13. Comparison of wind turbine rotor concepts [121]. (a) External rotor. (b) Internal rotor.![Energies 15 06700 g013]() On the other hand, inner stators have no natural cooling (exposing the stator to the wind helps with the cooling of the winding), so a forced cooling system should be considered; this introduces reliability issues and an additional maintenance cost [117]. However, the rise of the temperature made the stator subject to deflection [15]. This configuration requires a stiffer supporting structure; then, the total mass of the drive train becomes bigger [117]. Although this structure is not common for high-power low-speed generators, it has been used by Bergey for their 7.5 kW wind turbine.In axial flux machines, the permanent magnet produces a flux in the axial direction across the airgap, while the current in the slot flows in the radial direction. AF-PMSGs offer a high torque density, a simple winding, and a large diameter machine with a much smaller axial length compared to a radial flux machine [122,123]. To minimize the weight of the machine, especially the supporting structures, a 10 MW iron-less axial flux permanent magnet generator was investigated [124] for offshore wind turbines. Despite the fact that moving from a slotted (iron-cored) to slotless (air-cored) machine reduces considerably the active part’s mass and simplifies the stator production [108], the airgap will be larger in slotless topology, and hence, the flux density falls for the same quantity of the magnet. This construction was also conducted to winding retention issues and structural instability [116]. Air-cored machines have low iron losses due to the fact that they are toothless; this is especially interesting in the case of high-speed generators. On the other hand, in a direct-drive AF-PMSG, iron losses are not seen as a significant problem [108].This structure has been widely investigated by scientists for small and meduim wind turbines (5–350 kW) [125,126], such as a single-sided slotted stator (1.6 kW) generator [127]. A fundamental issue for this single-sided structure is the magnetic attraction force between the permanent magnet disc and the stator disc. Commonly, to balance the forces and prevent the displacement of the rotor or stator, double-sided machines (putting the rotor between two stators or vice versa) or multi-stage machines are used [127,128,129]. The most prevalent machine configuration in low-speed applications is the Torus machine [107], where the stator with toroidal winding is placed between two permanent magnet-based rotors. If the permanent magnets are placed opposite to each other on the two rotor discs, it is called a TORUS NS type; otherwise, it is a TORUS NN type. The TOURS machine offers a compact lightweight generator with good stator cooling and a negligible cogging torque. Although there are benefits to the TOURS concept, the absence of teeth creates an additional airgap, and thus, the TORUS configuration requires more magnet weight. In addition, with the increase of the power rating, the airgap becomes larger due to the magnet and the winding. Hence, this configuration is more suitable for small wind turbines [130]. Although the multi-stage TORUS machine could be used to compensate for the attraction force in case of an imbalance in airgaps, the amelioration of the flux density should be considered for high-power application.Another topology was proposed in [131], which consists of a slotless C-core AF-PMSG; more details could be found in [117]. A low-speed 1 MW C-core AF-PMSG generator was commercialized by NGenTec [132], and the electric machine was designed to reach high power ranges (≥6 MW).Jeumont Industry installed their first prototype of direct-drive AF-PMSG J48/750 (0.75 MW) in 2009 at the French wind farm Widehem [133]. A considerable reduction in the axial length was achieved because of the elimination of the voluminous gearbox. This model is not currently available, and no large wind turbines equipped with AF-PMSG generators are installed.
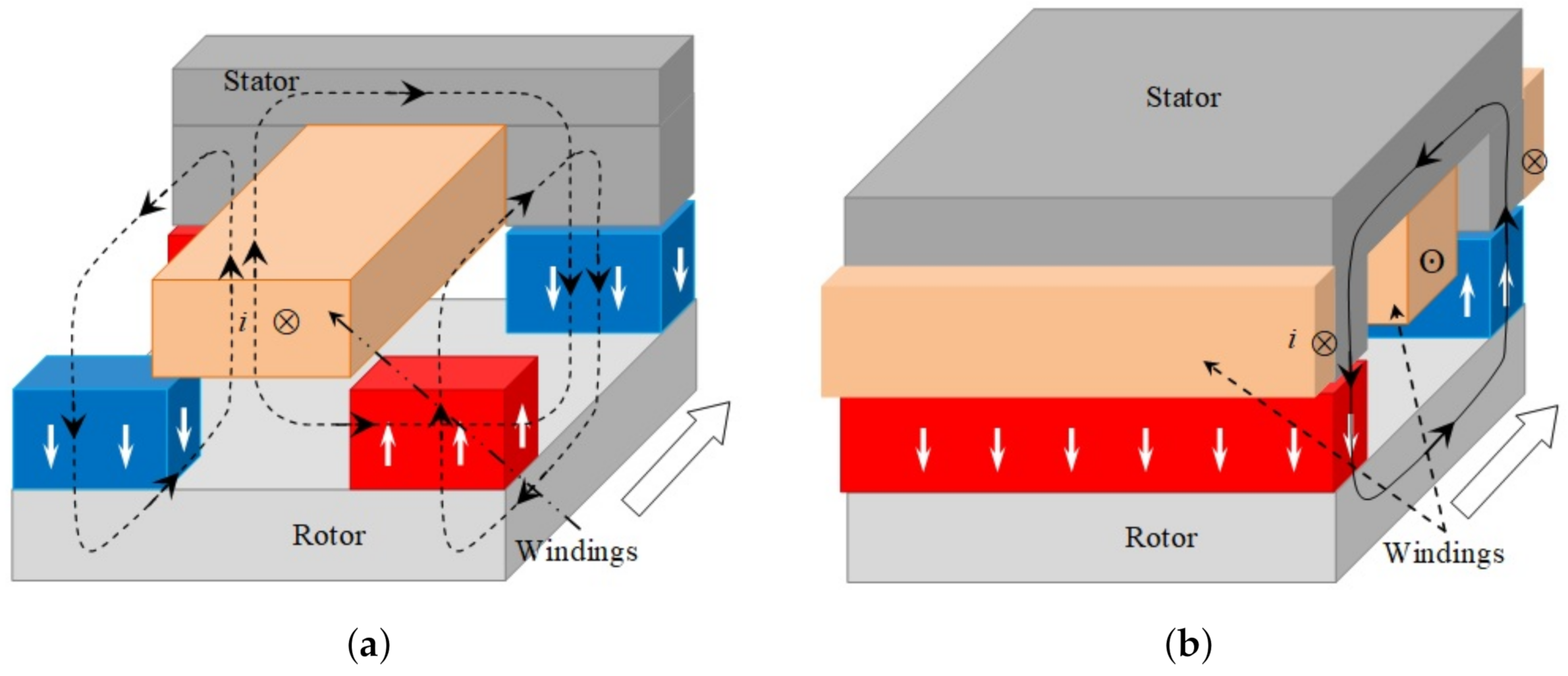
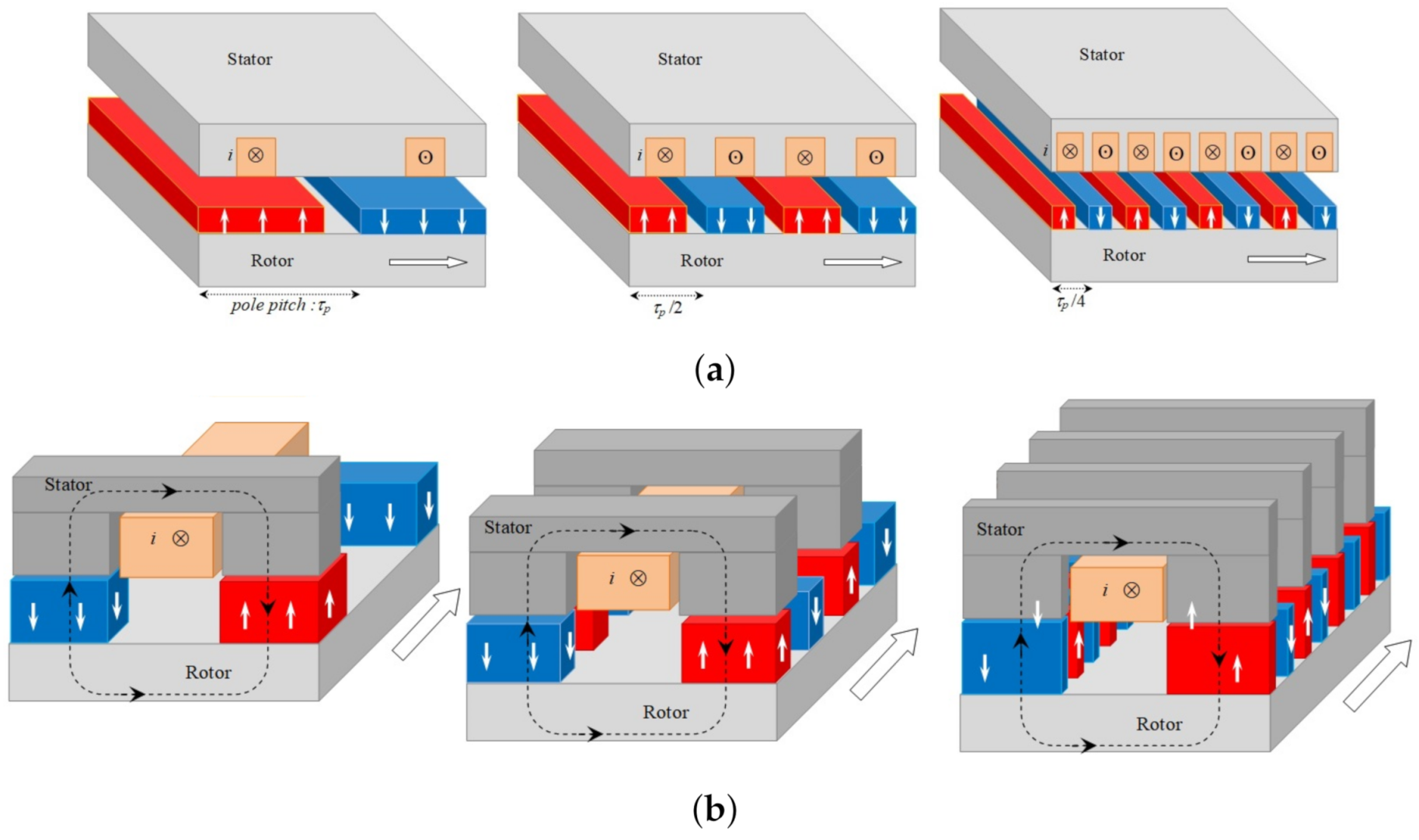
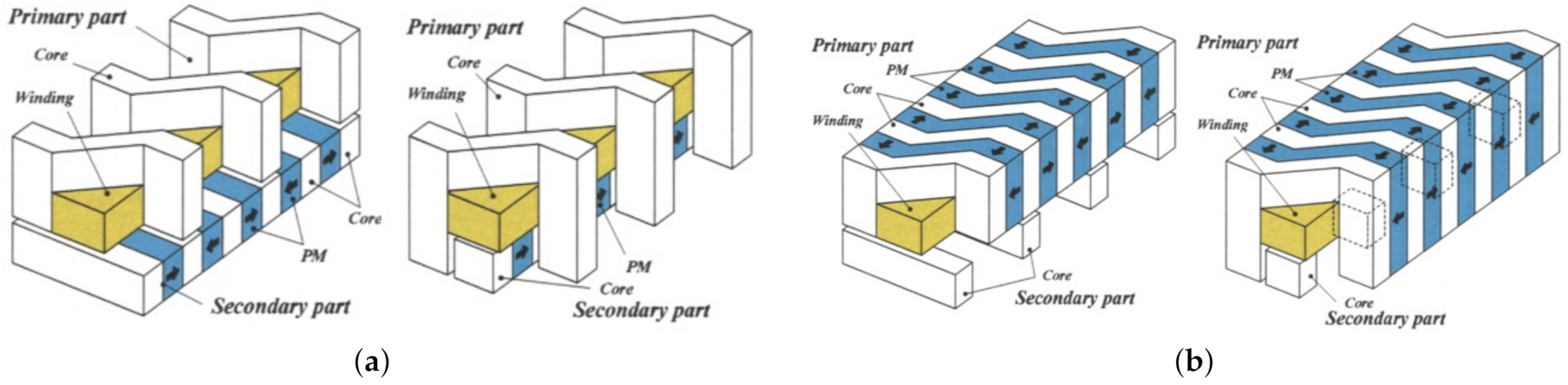
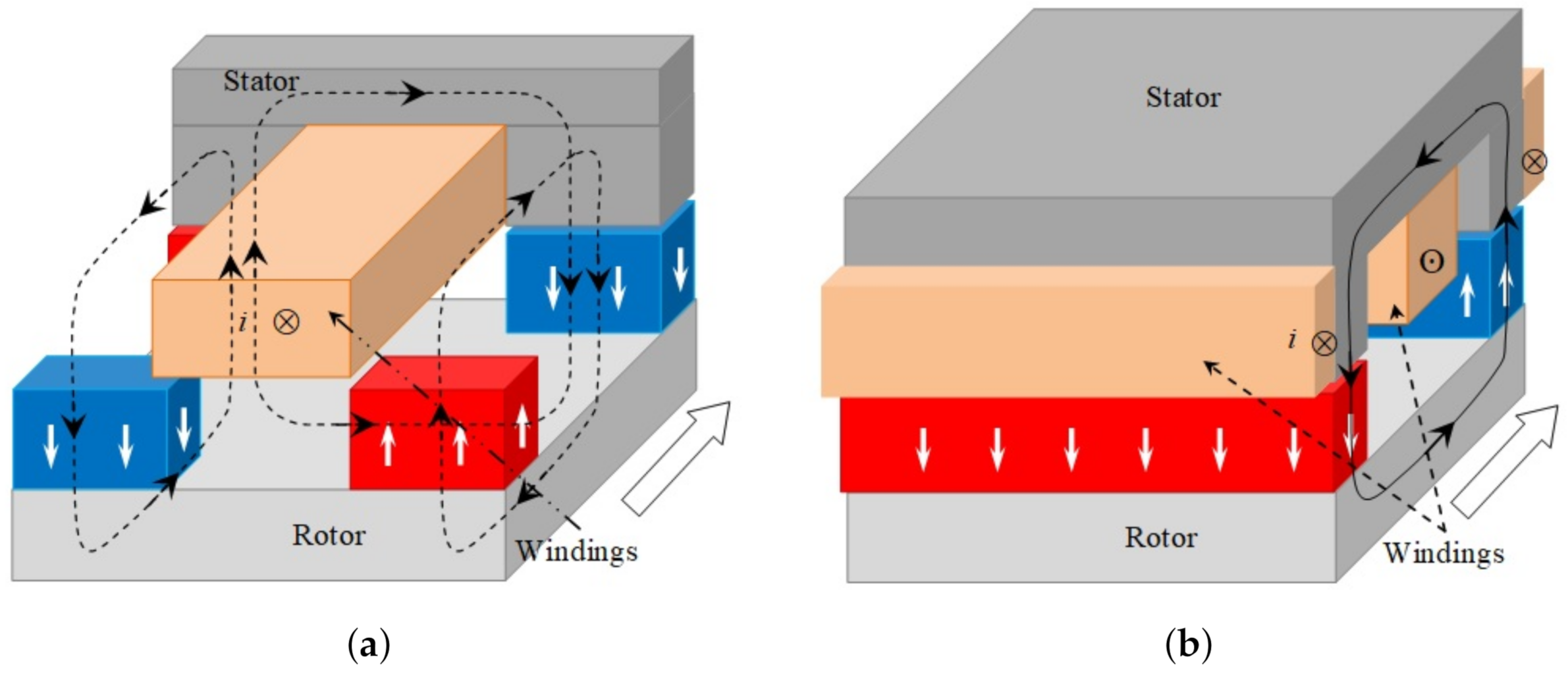
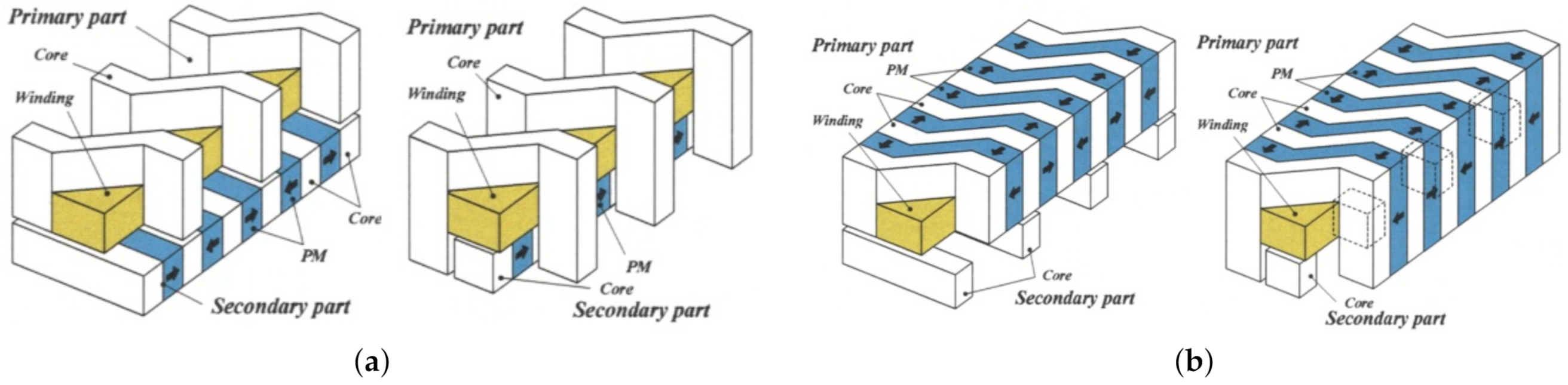
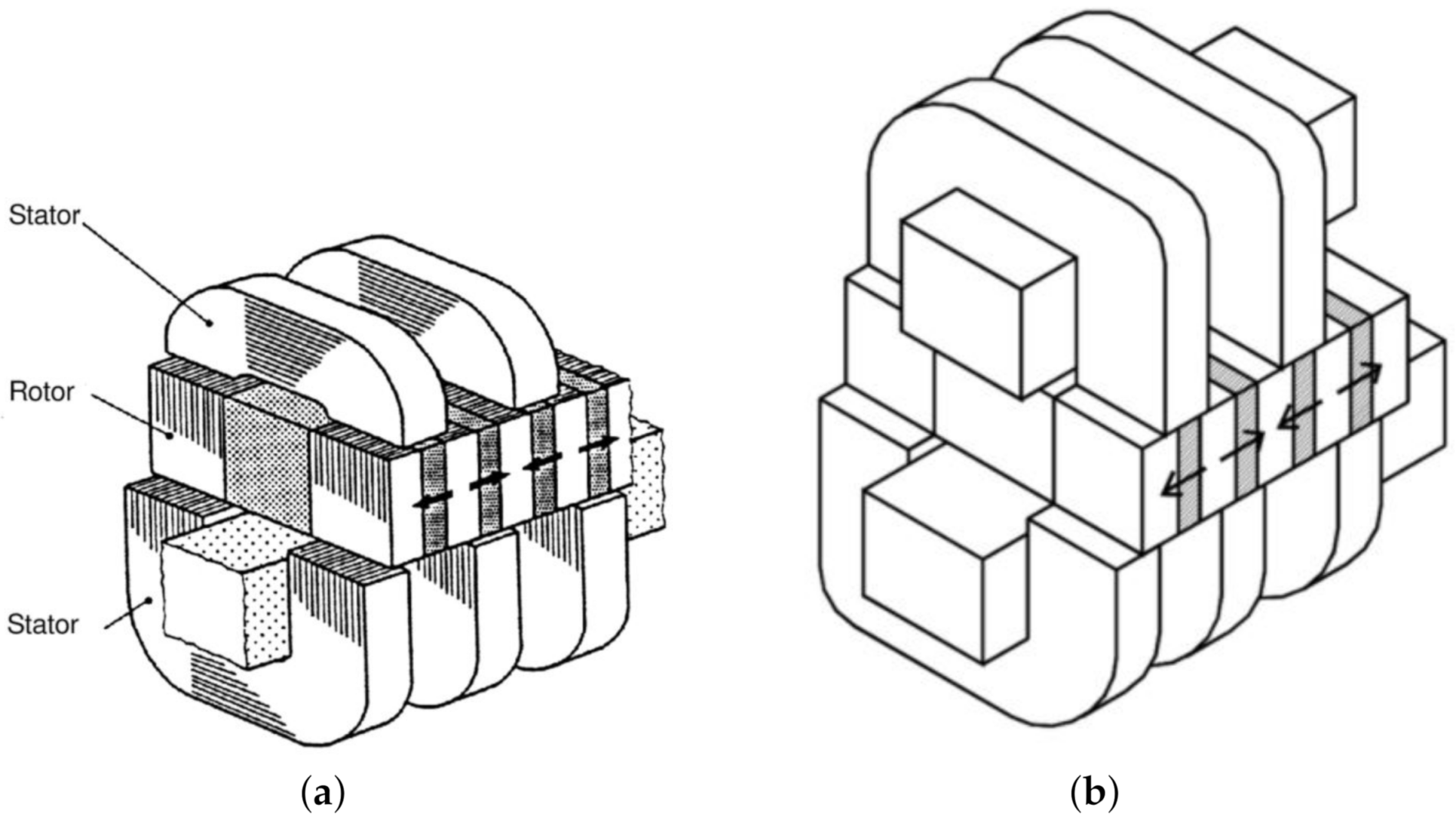
On the other hand, inner stators have no natural cooling (exposing the stator to the wind helps with the cooling of the winding), so a forced cooling system should be considered; this introduces reliability issues and an additional maintenance cost [117]. However, the rise of the temperature made the stator subject to deflection [15]. This configuration requires a stiffer supporting structure; then, the total mass of the drive train becomes bigger [117]. Although this structure is not common for high-power low-speed generators, it has been used by Bergey for their 7.5 kW wind turbine.In axial flux machines, the permanent magnet produces a flux in the axial direction across the airgap, while the current in the slot flows in the radial direction. AF-PMSGs offer a high torque density, a simple winding, and a large diameter machine with a much smaller axial length compared to a radial flux machine [122,123]. To minimize the weight of the machine, especially the supporting structures, a 10 MW iron-less axial flux permanent magnet generator was investigated [124] for offshore wind turbines. Despite the fact that moving from a slotted (iron-cored) to slotless (air-cored) machine reduces considerably the active part’s mass and simplifies the stator production [108], the airgap will be larger in slotless topology, and hence, the flux density falls for the same quantity of the magnet. This construction was also conducted to winding retention issues and structural instability [116]. Air-cored machines have low iron losses due to the fact that they are toothless; this is especially interesting in the case of high-speed generators. On the other hand, in a direct-drive AF-PMSG, iron losses are not seen as a significant problem [108].This structure has been widely investigated by scientists for small and meduim wind turbines (5–350 kW) [125,126], such as a single-sided slotted stator (1.6 kW) generator [127]. A fundamental issue for this single-sided structure is the magnetic attraction force between the permanent magnet disc and the stator disc. Commonly, to balance the forces and prevent the displacement of the rotor or stator, double-sided machines (putting the rotor between two stators or vice versa) or multi-stage machines are used [127,128,129]. The most prevalent machine configuration in low-speed applications is the Torus machine [107], where the stator with toroidal winding is placed between two permanent magnet-based rotors. If the permanent magnets are placed opposite to each other on the two rotor discs, it is called a TORUS NS type; otherwise, it is a TORUS NN type. The TOURS machine offers a compact lightweight generator with good stator cooling and a negligible cogging torque. Although there are benefits to the TOURS concept, the absence of teeth creates an additional airgap, and thus, the TORUS configuration requires more magnet weight. In addition, with the increase of the power rating, the airgap becomes larger due to the magnet and the winding. Hence, this configuration is more suitable for small wind turbines [130]. Although the multi-stage TORUS machine could be used to compensate for the attraction force in case of an imbalance in airgaps, the amelioration of the flux density should be considered for high-power application.Another topology was proposed in [131], which consists of a slotless C-core AF-PMSG; more details could be found in [117]. A low-speed 1 MW C-core AF-PMSG generator was commercialized by NGenTec [132], and the electric machine was designed to reach high power ranges (≥6 MW).Jeumont Industry installed their first prototype of direct-drive AF-PMSG J48/750 (0.75 MW) in 2009 at the French wind farm Widehem [133]. A considerable reduction in the axial length was achieved because of the elimination of the voluminous gearbox. This model is not currently available, and no large wind turbines equipped with AF-PMSG generators are installed. - Transverse Flux Permanent Magnet Synchronous Generators (TF-PMSG)TF-PMSG generators produce flux which is perpendicular to the direction of rotor rotation. Compared to a radial flux machine, in TF-PMSG, the electric and the magnetic circuits are decoupled. Unlike conventional machines with longitudinal stators, the space available for conductors in a transverse flux machine does not depend on the pole pitch [108] (See Figure 14). Usually, the filling factor in TF-PMSGs is much larger than in longitudinal machines [134]. Therefore, it is possible to obtain high current loading (up to 300 kA/m [135]) with a short pole pitch. Consequently, TF-PMSGs offer high-power densities (up to 150 kN/m2 [135]) [134,136].In addition to their high torque density (three to five times compared to conventional machines [134]), TF-PMSGs offer low copper losses, modular structure, fault tolerance and simple winding [137]. In contrast, the construction of such machines is complicated (e.g., a 3D flux path makes lamination difficult) and costly. TF-PMSGs suffer from a low power factor (between 0.35 and 0.55) [138,139] and high cogging torque [140]. Indeed, the poor power factor is due to the high armature leakage (the portion of the flux that is not crossing the airgap [141]) and the ineffective use of the magnetic flux [142] (the flux crossing the airgap in the opposite direction), but even with flux concentration TF-PMSG or iron bridges, the power factor is in the range of 0.7. The power factor improvement is possible by either an active current control of the converter or by optimizing the magnetic circuit to minimize the leakage [139,142,143]. TF-PMSGs with large airgaps seem to be no more attractive, because the force density is a little high or even low compared to RFPM machines [144]. The influence of the airgap thickness on the cost-to-torque ratio has been investigated in [144], and it could be concluded that for a direct-drive drive train, TF-PMSGs are only beneficial with thin airgaps. In such a case, the mechanical design should be considered. Then, air-cored TF-PMSGs were rapidly excluded not only due to their large airgap, but also, the need for the iron core is required to create flux lines lying in the transversal plane to the direction of movement [117]. In [145], four different topologies of TF-PMSGs have been investigated (see Figure 15), and the authors found that inner-rotor topologies are lighter and cheaper than outer-rotor ones.Due to their high performances compared to surface-mounted permanent magnet machines, many flux-concentrating TF-PMSGs have been reported in the literature. They could be either single- or double-sided, with or without iron bridges, single or double winding and with passive or active rotors (examples in Figure 16) [108,146,147]. The stator cores can take various shapes C-core, U-core, H-core, Quasi-U-core and E-core [148,149,150]. The iron bridges, placed between the stator cores, are used to reduce the fluxes generated by the unused permanent magnets. Different topologies of TF-PMSG for direct-drive wind turbines have been assessed with diverse criteria including mass, losses, cost and power density [117,145,151].TFPM generators with a broader range of output power have been investigated. In [152], Svechkarenko has studied TF-PMSG generators rated between 3 and 12 MW for offshore wind turbines. In [153], a lightweight 10 MW direct-drive TF-PMSG was designed, resulting in a generator with 60% of mass reduction compared with RFPM. Despite the several advantages of TF-PMSGs for direct-drive applications, they are still branded as low factor machines with high manufacturing and assembling complexity. Consequently, no large wind turbines equipped with TF-PMSG generators are installed.

5.3. Assessment Criteria and Design Requirement of Direct Drive Wind Turbine Generators
5.4. Drawbacks of Direct-Drive Wind Turbine
5.4.1. Risks Associated to the Weight and Diameter
- Increasing the flux densityIn order to reduce the volume of the large machine, it is possible to increase the tangential force density, as can been seen in (7). The tangential force density represents the average airgap shear stress resulting from the interaction of the machine’s magnetic filed and the stator current density. Indeed, we should either increase the current density or the airgap flux density due to the magnet, as illustrated in (8) [162]. Transverse-flux PMSGs could be used due their high shear stress [105]. Nevertheless, as explained in the previous section, those structures are not well adapted to our application and present crucial manufacturing issues.where is the fundamental amplitude of the airgap flux density from the magnet (assuming that the flux density is due to the magnet and the linear current loading from the stator is sinusoidally distributed around the stator), is the fundamental amplitude of the stator’s surface current density and is the angle between the peak of the and . It could be concluded from (8) that the torque is maximal when and are in phase. On the other hand, is limited by the stator teeth saturation, and the linear current density is limited by thermal constraints, which are imposed by the insulation materials, the characteristic of the magnet and the cooling techniques. In (9), peaks of both the airgap flux density and the current loading are given:where is the saturation flux density, is the copper fill factor in the coil, and are the width of the tooth and the slot, respectively, is the depth of the slot and is the slot insulation thickness.The maximum allowable current density in a DD-PMSG air-cooled machine is around 3–4 A/mm2 [157]. Hence, by enhancing the cooling system (forced-air cooling, water cooling or mixed cooling), higher values of temperature and densities could be reached. In fact, replacing the air cooling with direct water cooling will slightly influence the total mass of the generator (the mass of the liquid-to-liquid cooling system is around 50 kg [163]). Although air-cooling systems are a bit more efficient that water-cooling ones, they are heavy and bulky [105]. Another possible solution is using superconducting generators [164,165].
- High-Temperature Superconducting Generators (HTSG)With the progress in high-temperature superconducting wire, HTSG looks like quite a promising solution to increase power densities without REE while offering a high efficiency and a reduced weight compared to the conventional generators [166]. For wind turbines, many high-power HTSGs were proposed [167,168]. In [169], a 10 MW MgB2 superconducting generator for offshore was designed and compared with a conventional PMSG, and weight reduction was noticed in both the generator and tower, with 26% and 11%, respectively. Furthermore, in [170], an electromechanical feasibility of a 10 MW HTSG class wind turbine was investigated. In [171], a minimization of the amount and the cost of HTS coils was discussed. In [172], another optimization of a 10 MW HTSG wind generator based on its weight, its volume and the length of the HTS wire was discussed, resulting in a machine with almost the half of the weight compared with PMSG for the same capacity. However, in [173], a 12 MW offshore wind turbine was proposed but with low temperature superconductors (LTS) field winding. In the academic research, where the HTS emerges as a promising solution for the large-scale generators, many prototypes were proposed by the industrial manufacturers such as AMSC SeaTitan 10 MW, GE [174,175,176] and AML [177]. Recently, the first full-scale gearless high-temperature superconducting wind turbine generator was tested [178].
- Using a single/two-stage gearboxA hybrid system (multibrid concept) of conversion has been introduced in the wind turbines in order to decrease the mass and the volume of the DD-PMSG [179]. It has been proposed to use a single-stage gearbox (with a gear ratio in the order of 6 or higher) coupled to a synchronous generator. It aims to avoid the drawbacks of both geared and gearless drive trains by coupling a permanent magnet machine with a gearbox having a reduced number of stages. Hence, that conducted to high efficiency and lighter mass compared to the conventional generators. This arrangement was first introduced by Areva and further promoted by Vestas, WinWinD, Adwen, Aerodyn and Guangdong Mingyang. Although most of the large wind turbine manufacturers adopted medium-speed PMSGs, Aerodyn with its SCD 8.0 MW used an electrically exited synchronous generator. Table 7 shows examples of semi-direct variable-speed multi-megawatt wind turbines.
- PMSG multiple generator-based concept (Liberty/Clipper Wind Power concept)The price of gearboxes per KiloWatt (kW) increases with the increase on the rated power; hence, as distributed drive train with several generators can help to achieve high power density with competitive cost [180,181]. The Clipper concept is based on splitting the drive path from the wind’s rotor to drive multiple parallel generators [181]. Therefore, when one generator/converter fails (under repair), the rest of the generators/converters continue to produce the electric power; hence, this concept offers effective fault-tolerant operation. A commercial conversion system of 2.5 MW with a special quantum drive train (not a conventional gearbox with planetary design, but a new panted design), four PMSGs and four converters (Clipper Windpower) was developed by Clipper wind. Although this configuration offers a number of technical and economic advantages, it has a drawback of requiring a complicated gear-set.
- Using lighter materialUsing material such as aluminum alloys and carbon fiber may offer a light but expensive structural support compared to steel support [182,183]. However, the copper wire could be changed by coils made of aluminum. As aluminum is significantly lighter than copper, a considerable weight reduction may be achieved by adopting aluminum coils; it should also shorten production times [184]. This techoloclogy has been used by Enecron in its EP3 serie (form-wound coils made of aluminum in series for E-126 EP3 and E-138 EP3 wind turbines) [185].
- Using iron-less machineA promising solution was investigated in [186,187]. It consists of the use of iron-less PMSGs, which are lighter than the iron-cored PM generators (a mass typically 20% to 30% of equivalent designs based on iron-cored magnetic circuits) with efficiency over 90%. In contrast, because of its large diameter, this structure could be aerodynamically inefficient [182]. Moreover, in [188], another original idea was proposed: it consists of putting generator bearings adjacent to the airgap and supporting them with rails in order to reduce the stiffness requirements of the rotor and the stator, leading to a large weight decrease. In [182], a new concept using magnetic bearings and mechanical bearings was investigated, which allowed reducing the 5 MW rotor’s mass from 50 t (conventional rotor) to 28 t.
- Using modular machineUsing a modular concept (physical modularity of functional modularity) for the conception of the machine could help reduce the mass of the machine by avoiding wasted material [189,190,191]. Physical modularity offers simple stator lamination with assembly facilities, especially for a large airgap diameter (easy to add and remove modules) [190]. The functional modularity (winding to multiple parallel circuits) would be an interesting option to enhance the fault tolerence of the machine. Even though modular machines present many advantages, experiments show that they present high leakage inductance, which imposes a complex power conditioning unit [28]. Next, the arrangement of modules can lead to mechanical instability, and thus, audible noice and fatigue may be generated [28]. In addition, using modular concentrated winding would induce large space harmonics that lessen the efficiency of the machine.
5.4.2. Risks Associated to the Price of Rare-Earth Elements
- Replacing the rare-earth material in wind turbine generatorsThe flux concentration may allow the use of magnet materials with low energy density (ferrite) avoiding REE (NdFeB) [118,193]. Inserting ferrite magnets between pole shoes will reinforce the rotor magnetic flux. Therefore, one can get rid of the need for PM with high energy production. In [194], a 6 MW PMSG for a direct-drive wind turbine, using only ferrite magnet, was presented. A valuable comparison was conducted between two 6 MW PMSG topologies, a conventional surface-mounted NdFeB generator and an alternative topology with flux concentrating ferrite magnet; both machines have the same stator. The authors proved that despite the fact that the generator with free REE was heavier ( t versus t) and had high inertia (156,783 kg·m2 versus 898,587 kg·m2), the cost of energy for both machines was almost the same. In addition, with an appropriate optimization, the ferrite PMSG could be one of the most appropriate options if the price of the NdFeB magnets will continue to increase. Nevertheless, when considering the structural support, the energy cost of the free rare-earth magnets machine surged by more than 90% [14]. In addition, Halbach arrays could be used to concentrate the magnetic flux [195]. Another solution was patented in 2015, exploiting a new magnetic circuit design that allows the use of a rare-earth free permanent magnet with low coercivity (AlNiCo, FeCoW) to ameliorate the performance on the PMSG [196].
- Using doubly-excited machineUnlike PMSG, a doubly-excited machine uses permanent magnets and excitation coils. This aims to avoid the drawbacks of both an electrically exited synchronous generator and permanent magnet synchronous generators.
- High-Temperature Superconducting Generators HTSGHTSG could be an option to avoid the rare-earth magnets.
6. Conclusions
- A radial flux generator seems to be a better option for direct drive wind turbines.
- In low-speed wind turbines, the mass of the supporting structure becomes dominant in the total drive train mass.
- Electrically excited synchronous generators are not suitable for small pole pitch machines (high pole number).
- The size and cost reduction of generators are of particular interest. There are two main drawbacks of DD-PMSG:
- –
- Risks associated to diameter and size. Opportunities for improvement:
- *
- Size reduction (increasing the flux density, enhancing the cooling, using high-temperature superconductors, adding a single-stage gearbox, using a modular generator).
- *
- Mass reduction (using iron-less machine, using lighter materials (e.g., aluminum alloys).
- –
- Risks associated to the prices of rare-earth permanent magnets. Opportunities for improvement:
- *
- Replacing rare-earth permanent magnets.
- *
- Double excitation.
- –
- Transportation and logistic limitations (related to the size and the mass of the machine).
Funding
Conflicts of Interest
References
- Willey, L.D. Design and Development of Megawatt Wind Turbines; WIT Press: Billerica, MA, USA, 2010; Volume 44, Chapter 6; pp. 187–253. [Google Scholar] [CrossRef]
- Sartori, L.; Bellini, F.; Croce, A.; Bottasso, C. Preliminary design and optimization of a 20 MW reference wind turbine. J. Phys. Conf. Ser. 2018, 1037, 042003. [Google Scholar] [CrossRef]
- Nejad, A.R.; Keller, J.; Guo, Y.; Sheng, S.; Polinder, H.; Watson, S.; Dong, J.; Qin, Z.; Ebrahimi, A.; Schelenz, R.; et al. Wind Turbine Drivetrains: State-of-The-Art Rechnologies and Future Development Trends. Wind. Energy Sci. 2022, 7, 387–411. [Google Scholar] [CrossRef]
- IEC 60050-415; International Electrotechnical Vocabulary (IEV)—Part 415: Wind Turbine Generator Systems. International Electrotechnical Commission IEC: Geneva, Switzerland, 1999.
- IEC 60050-192; International Electrotechnical Vocabulary (IEV)—Part 192: Dependability. International Electrotechnical Commission IEC: Geneva, Switzerland, 2015.
- Carroll, J. Cost of Energy Modelling and Reductionopportunities for Offshore Wind Turbines. Ph.D. Thesis, University of Strathclyde, Glasgow, UK, 2016. [Google Scholar]
- Carroll, J.; McDonald, A.; McMillan, D. Failure rate, repair time and unscheduled O & M cost analysis of offshore wind turbines. Wind. Energy 2016, 19, 1107–1119. [Google Scholar] [CrossRef]
- Moghadam, F.; Nejad, A. Evaluation of PMSG-based drivetrain technologies for 10-MW floating offshore wind turbines: Pros and cons in a life cycle perspective. Wind. Energy 2020, 23, 1542–1563. [Google Scholar] [CrossRef]
- Artigao, E.; Koukoura, S.; Honrubia-Escribano, A.; Carroll, J.; McDonald, A.; Gómez-Lázaro, E. Current signature and vibration analyses to diagnose an in-service wind turbine drive train. Energies 2018, 11, 960. [Google Scholar] [CrossRef]
- Jaen-Sola, P.; Donald, A.S.M.; Oterkus, E. Design of Direct-Drive Wind Turbine Electrical Generator Structures using Topology Optimization Techniques. J. Phys. Conf. Ser. 2020, 1618, 052009. [Google Scholar] [CrossRef]
- Hayes, A.C.; Whiting, G.L. Reducing the Structural Mass of Large Direct Drive Wind Turbine Generators through Triply Periodic Minimal Surfaces Enabled by Hybrid Additive Manufacturing. Clean Technol. 2021, 3, 227–242. [Google Scholar] [CrossRef]
- Tartt, K.; Amiri, A.; McDonald, A.; Jaen-Sola, P. Structural Optimisation of Offshore Direct Drive Wind Turbine Generators Including Static and Dynamic Analyses. J. Phys. Conf. Ser. 2021, 2018, 012040. [Google Scholar] [CrossRef]
- Sola, P. Advanced Structural Modelling and Design of Wind Turbine electrical Generators. Ph.D. Thesis, Newcastle University, Newcastle upon Tyne, UK, 2017. [Google Scholar]
- McDonald, A.; Bhuiyan, N.A. On the Optimization of Generators for Offshore Direct Drive Wind Turbines. IEEE Trans. Energy Convers. 2017, 32, 348–358. [Google Scholar] [CrossRef] [Green Version]
- Mcdonald, A.; Mueller, M.; Polinder, H. Structural Mass in Direct-Drive Permanent Magnet Electrical Generators. Renew. Power Gener. IET 2008, 2, 3–15. [Google Scholar] [CrossRef]
- Gaertner, E.; Rinker, J.; Sethuraman, L.; Zahle, F.; Anderson, B.; Barter, G.E.; Abbas, N.J.; Meng, F.; Bortolotti, P.; Skrzypinski, W.; et al. IEA Wind TCP Task 37: Definition of the IEA 15-Megawatt Offshore Reference Wind Turbine; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2020. [CrossRef]
- Spinato, F.; Tavner, P.; van Bussel, G.; Koutoulakos, E. Reliability of Wind Turbine Subassemblies. IET Renew. Power Gener. 2009, 3, 387. [Google Scholar] [CrossRef]
- Faulstich, S.; Hahn, B.; Tavner, P.J. Wind Turbine Downtime and its Importance for Offshore Deployment. Wind Energy 2011, 14, 327–337. [Google Scholar] [CrossRef]
- Igba, J.; Alemzadeh, K.; Durugbo, C.; Henningsen, K. Performance Assessment of Wind Turbine Gearboxes Using in-Service Data: Current Approaches and Future Trends. Renew. Sustain. Energy Rev. 2015, 50, 144–159. [Google Scholar] [CrossRef]
- Neill, S.P.; Hashemi, M.R. Offshore Wind. In Fundamentals of Ocean Renewable Energy; E-Business Solutions; Academic Press: Cambridge, MA, USA, 2018; pp. 83–106. [Google Scholar] [CrossRef]
- Tong, W. Fundamentals of Wind Energy. In Wind Power Generation and Wind Turbine Design; WIT Press: Southampton, UK, 2010; p. 23. [Google Scholar]
- Aissaoui, A.G.; Tahour, A. (Eds.) Wind Turbines—Design, Control and Applications; InTech: Houston, TX, USA, 2016. [Google Scholar] [CrossRef]
- Dykes, K.; Platt, A.; Guo, Y.; Ning, A.; King, R.; Parsons, T.; Petch, D.; Veers, P. Effect of Tip-Speed Constraintson the Optimized Design of a Wind Turbine; Technical Report; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2014.
- Johnson, K.; Fingersh, L.; Balas, M.; Pao, L. Methods for Increasing Region 2 Power Capture on a Variable Speed HAWT. In Proceedings of the 42nd AIAA Aerospace Sciences Meeting and Exhibit, Reno, Nevada, 5–8 January 2004. [Google Scholar] [CrossRef]
- Wang, N. Advanced Wind Turbine Control; Hu, W., Ed.; Springer: Cham, Switzerland, 2018; pp. 281–297. [Google Scholar] [CrossRef]
- Cheng, M.; Zhu, Y. The State of the Art of Wind Energy Conversion Systems and Technologies: A Review. Energy Convers. Manag. 2014, 88, 332–347. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Iov, F.; Chen, Z.; Ma, K. Power Electronics and Controls for Wind Turbine Systems. In Proceedings of the 2010 IEEE International Energy Conference, Manama, Bahrain, 18–22 December 2010; pp. 333–344. [Google Scholar] [CrossRef]
- Dubois, M.R. Review of Electromechanical Conversion in Wind Turbines; Technical Report, Group Electrical Power Processing; TU Delft: Delft, The Netherlands, 2000. [Google Scholar]
- Hansen, A.D. Generators and Power Electronics for Wind Turbines; John Wiley & Sons, Ltd.: West Sussex, UK, 2012. [Google Scholar] [CrossRef]
- Sadarangani, C. Brushless Wind Power Generator for Limited Speed Range; Technical Report; Energiforsk AB: Stockholm, Sweden, 2018. [Google Scholar]
- Touimi, K. Design Optimization of a Gearbox Driven Tidal Stream Turbine. Ph.D. Thesis, Université de Bretagne Occidentale, Brest, France, 2020. [Google Scholar]
- IRENA. Renewable Capacity Highlights; Technical Report; The International Renewable Energy Agency (IRENA): Abu Dhabi, United Arab Emirates, 2020. [Google Scholar]
- IRENA. Renewable Capacity Statistics 2021; Technical Report; The International Renewable Energy Agency (IRENA): Abu Dhabi, United Arab Emirates, 2021. [Google Scholar]
- Goudarzi, N.; Zhu, W.D. A Review of the Development of Wind Turbine Generators Across the World. In ASME International Mechanical Engineering Congress and Exposition; Dynamics, Control and Uncertainty, Parts A and B: Houston, TX, USA, 2012; pp. 1257–1265. [Google Scholar] [CrossRef]
- IRENA. Renewable Power Generation Costs in 2019; Technical Report; International Renewable Energy Agency: Abu Dhabi, United Arab Emirates, 2020. [Google Scholar]
- FS-UNEP. Global Trends in Renewable Energy Investment 2020; Technical Report; The Frankfurt School—UNEP Collaborating Centre for Climate & Sustainable Energy Finance; Frankfurt School of Finance & Management: Frankfurt, Germany, 2020. [Google Scholar]
- Antonini, E.G.A.; Caldeira, K. Spatial Constraints in Large-Scale Expansion of Wind Power Plants. Proc. Natl. Acad. Sci. USA 2021, 118, e2103875118. [Google Scholar] [CrossRef]
- GWEC. Global Wind Report 2021; Technical Report; Global Wind Energy Council: Brussels, Belgium, 2021. [Google Scholar]
- Klinge Jacobsen, H.; Hevia-Koch, P.; Wolter, C. Nearshore and Offshore Wind Development: Costs and Competitive Advantage Exemplified by Nearshore Wind in Denmark. Energy Sustain. Dev. 2019, 50, 91–100. [Google Scholar] [CrossRef]
- Webstore International Electrotechnical Commission IEC. Available online: https://webstore.iec.ch/ (accessed on 15 April 2021).
- Thresher, R.W.; Robinson, M.; Musial, W.; Veers, P.S. Evolution of Modern Wind Turbines Part B: 1988 to 2008. In Wind Turbine Technology: Fundamental Concepts in Wind Turbine Engineering, Second Edition; ASME Press: New York, NY, USA, 2009. [Google Scholar] [CrossRef]
- Abed, K.; El-Mallah, A. Capacity Factor of Wind Turbines. Energy 1997, 22, 487–491. [Google Scholar] [CrossRef]
- Chaviaropoulos, P.; Natarajan, N.; Jensen, P. Key Performance Indicators and Target Values for Multi-Megawatt Offshore Turbines. In Proceedings of the EWEA 2014 European Wind Energy Association (EWEA), Barcelona, Spain, 10–13 March 2014. [Google Scholar]
- GWEC. Global Offshore Wind 2020: Key Trends and Data; Technical Report; Global Wind Energy Council: Brussels, Belgium, 2021. [Google Scholar]
- GWEC. Global Offshore Wind Report 2020; Technical Report; Global Wind Energy Council: Brussels, Belgium, 2020. [Google Scholar]
- Telsnig, T. Wind Energy Technology Development Report 2020; Publications Office of the European Union: Luxembourg, 2020. [Google Scholar]
- IEA. Offshore Wind Outlook 2019; Technical Report; The International Energy Agency: Paris, France, 2019.
- WindEurope. Wind Energy in Europe: Outlook to 2020; Technical Report; Wind Europe: Brussels, Belgium, 2017. [Google Scholar]
- WindEurope. Offshore Wind in Europe—Key Trends and Statistics 2020; Technical Report; Wind Europe: Brussels, Belgium, 2020. [Google Scholar]
- Andre, T.; Guerra, F. Renewables 2020: Global Status Report; REN21 (Renewable Energy Policy Network for the 21st Century): Paris, France, 2020. [Google Scholar]
- Northwester 2. Available online: https://www.belgianoffshoreplatform.be/fr/projects/northwester-2 (accessed on 12 April 2021).
- QFWE. 2020 Global Floating Wind Energy Market and Forecast Report2019—2034; Technical Report; Quest Floating Wind Energy: Sugar Land, TX, USA, 2020. [Google Scholar]
- Éolienne en Mer Dieppe et Le Tréport: Le Projet en Bref. Available online: https://dieppe-le-treport.eoliennes-mer.fr/le-projet/le-projet-en-bref/ (accessed on 12 April 2021).
- Éoliennes en Mer Îles d’Yeu et Noirmoutier: Le Projet en Bref. Available online: https://iles-yeu-noirmoutier.eoliennes-mer.fr/le-projet/le-projet-en-bref/ (accessed on 12 April 2021).
- Hornsea Two. Available online: https://hornseaprojects.co.uk/hornsea-project-two (accessed on 12 April 2021).
- Windpark Estinnes. Available online: https://www.windvision.com/project/estinnes (accessed on 12 April 2021).
- Electric, G. Haliade-X Offshore Wind Turbine. Available online: https://www.ge.com/renewableenergy/wind-energy/offshore-wind/haliade-x-offshore-turbine (accessed on 10 April 2021).
- SIEMENS. SG 11.0-200 DD Offshore Wind Turbine. Available online: https://www.siemensgamesa.com/products-and-services/offshore/wind-turbine-sg-11-0-200-dd (accessed on 10 April 2021).
- Seawind’s Innovative High-Performing Turbine. Available online: https://seawindtechnology.com/solutions (accessed on 10 April 2021).
- EnBW. Floating Wind Turbine: Nezzy2. Available online: https://www.enbw.com/renewable-energy/wind-energy/our-offshore-wind-farms/nezzy2-floating-wind-turbine (accessed on 10 April 2021).
- EOLINK. EOLINK Cost-effective Floating Wind Farms. Available online: http://eolink.fr/en/about (accessed on 10 April 2021).
- SEM-REV. SEM-REV Presentation & Mission. Available online: https://sem-rev.ec-nantes.fr/english-version/sem-rev/sem-rev-presentation-mission (accessed on 10 April 2021).
- INNWIND.EU. Design of State of the Art 10–20MW Offshore Wind Turbines. Available online: http://www.innwind.eu/about-innwind (accessed on 10 April 2021).
- AdVanced Aerodynamic Tools for lArge Rotors (AVATAR). Available online: https://cordis.europa.eu/project/id/608396 (accessed on 10 April 2021).
- Ceyhan, J.S.O.; Boorsma, K.; Gonzalez, A.; Munduate, X.; Pires, O.; Sørensen, N.; Ferreira, C.; Sieros, G.; Madsen, J.; Voutsinas, S.; et al. Latest results from the EU project AVATAR: Aerodynamic modelling of 10 MW wind turbines. J. Phys. Conf. Ser. 2016, 753, 022017. [Google Scholar] [CrossRef]
- SUMR. SUMR Segmented Ultralight Morphing Rotor. Available online: https://sumrwind.com (accessed on 10 April 2021).
- HiPRWind Project. Available online: http://www.hiprwind.eu/?q=mission (accessed on 10 April 2021).
- COREWIND Project. Available online: http://corewind.eu/about (accessed on 10 April 2021).
- FLOTANT Project. Available online: https://flotantproject.eu (accessed on 10 April 2021).
- FTI Intelligence. Global Wind Market Update, Demand & Supply 2016: Part One–Supply Side Analysis; FTI Intelligence: Copenhagen, Denmark, 2017. [Google Scholar]
- Vázquez-Hernández, C.; Serrano-González, J.; Centeno, G. A Market-Based Analysis on the Main Characteristics of Gearboxes Used in Onshore Wind Turbines. Energies 2017, 10, 1686. [Google Scholar] [CrossRef]
- Polinder, H.; de Haan, S.W.H.; Dubois, M.R.; Slootweg, J.G.H. Basic Operation Principles and Electrical Conversion Systems of Wind Turbines. EPE J. 2005, 15, 43–50. [Google Scholar] [CrossRef]
- Camm, E.; Behnke, M.R.; Bolado, O.; Bollen, M.; Bradt, M.; Brooks, C.; Dilling, W.; Edds, M.; Hejdak, W.J.; Houseman, D.; et al. Characteristics of Wind Turbine Generators for Wind Power Plants. In Proceedings of the 2009 IEEE Power Energy Society General Meeting, Calgary, AB, Canada, 26–30 July 2009; pp. 1–5. [Google Scholar] [CrossRef]
- Handman, E.M.C.B.D. Dual-Speed Wind Turbine Generation; Technical Report; National Renewable Energy Laborator: Golden, CO, USA, 1996.
- Petersson, A. Analysis, Modeling and Control of Doubly-Fed Induction Generators for Wind Turbines; Technical Report no. 464L; School of Electrical Engineering, Chalmers University of Technology: Goteborg, Sweden, 2005. [Google Scholar]
- Carlin, P.; Laxson, A.; Muljadi, E. The History and State of the Art of Variable-Speed Wind Turbine Technology. Wind Energy 2003, 6, 129–159. [Google Scholar] [CrossRef]
- Santoso, M.S.S. Dynamic Models for Wind Turbines and Wind Power Plants; Technical Report; The University of Texas at Austin: Austin, TX, USA, 2008. [Google Scholar]
- Blaabjerg, F.; Chen, Z.; Teodorescu, R.; Iov, F. Power Electronics in Wind Turbine Systems. In Proceedings of the 2006 CES/IEEE 5th International Power Electronics and Motion Control Conference, Shanghai, China, 14–16 August 2006; Volume 1, pp. 1–11. [Google Scholar] [CrossRef]
- Rabiul, M.I.; Youguang, G.; Jianguo, Z. A Review of Offshore Wind Turbine Nacelle: Technical Challenges, and Research and Developmental Trends. Renew. Sustain. Energy Rev. 2014, 33, 161–176. [Google Scholar] [CrossRef]
- AMSC. Optimizing Reactive Compensation for Wind Parks: Meeting Today’s Utility and Regulatory Requirements. In A White Paper by AMSC; AMSC: Devens, MA, USA, 2012. [Google Scholar]
- Earnest, J.; Rachel, S. Wind Power Technology; PHI Learning: Delhi, India, 2020. [Google Scholar]
- Khazdozian, H.A.; Hadimani, R.L.; Jiles, D.C. Size Reduction of Permanent Magnet Generators for Wind Turbines with Higher Energy Density Permanent Magnets. In Proceedings of the 2014 North American Power Symposium (NAPS), Pullman, WA, USA, 7–9 September 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Colli, V.D.; Marignetti, F.; Attaianese, C. Analytical and Multiphysics Approach to the Optimal Design of a 10-MW DFIG for Direct-Drive Wind Turbines. IEEE Trans. Ind. Electron. 2012, 59, 2791–2799. [Google Scholar] [CrossRef]
- Colli, V.D.; Marignetti, F.; Attaianese, C. 2-D Mechanical and Magnetic Analysis of a 10 MW Doubly Fed Induction Generator for Direct-Drive Wind Turbines. In Proceedings of the 2009 35th Annual Conference of IEEE Industrial Electronics, Porto, Portugal, 3–5 November 2009; pp. 3863–3867. [Google Scholar] [CrossRef]
- Chen, Z. Issues of Connecting Wind Farms into Power Systems. In Proceedings of the 2005 IEEE/PES Transmission & Distribution Conference & Exposition: Asia and Pacific, Dalian, China, 18 August 2005. [Google Scholar] [CrossRef]
- Sheng, S. Gearbox Typical Failure Modes, Detection and Mitigation Methods; Technical Report; National Renewable Energy Laboratory/National WindTechnology Center: Golden, CO, USA, 2014.
- Ragheb, A.; Ragheb, M. Wind Turbine Gearbox Technologies. In Proceedings of the 2010 1st International Nuclear & Renewable Energy Conference (INREC), Amman, Jordan, 21–24 March 2010. [Google Scholar] [CrossRef]
- Ragheb, A.M.; Ragheb, M. Fundamental and Advanced Topics in Wind Power; Chapter Wind Turbine Gearbox Technologies; IntechOpen: London, UK, 2011; pp. 189–206. [Google Scholar]
- Ukonsaari, J.; Bennstedt, N.V.A. Wind Turbine Gearboxes: Maintenance Effect on Present and Future Gearboxes for Wind Turbines; Technical Report; ENERGIFORSK: Stockholm, Sweden, 2016. [Google Scholar]
- Szász, R.Z.; Fuchs, L. Wind Turbine Acoustics. In Wind Power Generation and Wind Turbine Design; Tong, W., Ed.; WIT Press: Southampton, UK, 2010; pp. 153–183. [Google Scholar]
- Oerlemans, S. Wind Turbine Noise: Primary Noise Sources; Technical Report; National Aerospace Laboratory NLR: Amsterdam, The Netherlands, 2011. [Google Scholar]
- Spera, D.A. Introduction to Modern Wind Turbines. In Wind Turbine Technology: Fundamental Concepts in Wind Turbine Engineering, Second Edition; ASME Press: New York, NY, USA, 2009. [Google Scholar] [CrossRef]
- je Bang, D.; Polinder, H.; Shrestha, G.; Ferreira, J.A. Promising Direct-Drive Generator System for Large Wind Turbines. In Proceedings of the 2008 Wind Power to the Grid—EPE Wind Energy Chapter 1st Seminar, Delft, The Netherlands, 27–28 March 2008. [Google Scholar] [CrossRef]
- Li, H.; Chen, Z. Design Optimization and Site Matching of Direct-Drive Permanent Magnet Wind Power Generator Systems. Renew. Energy 2009, 34, 1175–1184. [Google Scholar] [CrossRef]
- Chen, Z.; Blaabjerg, F. Wind Energy: The World’s Fastest Growing Energy Source. IEEE Power Electron. Soc. Newsl. 2006, 18, 15–19. [Google Scholar]
- Grauers, A. Design of Direct-Driven Permanent-Magnet Generatorsfor Wind Turbines. Ph.D. Thesis, Chalmers University of Technology, Göteborg, Sweden, 1996. [Google Scholar]
- Polinder, H.; Pijl, F.V.D.; Vilder, G.J.D.; Tavner, P. Comparison of Direct-Drive and Geared Generator Concepts for Wind Turbines. IEEE Trans. Energy Convers. 2006, 21, 725–733. [Google Scholar] [CrossRef]
- Chinchilla, M.; Arnaltes, S.; Burgos, J.C. Control of Permanent-Magnet Generators Applied to Variable-Speed Wind-Energy Systems Connected to the Grid. IEEE Trans. Energy Convers. 2006, 21, 130–135. [Google Scholar] [CrossRef]
- Chen, Z.; Guerrero, J.M.; Blaabjerg, F. A Review of the State of the Art of Power Electronics for Wind Turbines. IEEE Trans. Power Electron. 2009, 24, 1859–1875. [Google Scholar] [CrossRef]
- Hamatwi, E.; Davidson, I.E.; Gitau, M.N. Rotor Speed Control of a Direct-Driven Permanent Magnet Synchronous Generator-Based Wind Turbine Using Phase-Lag Compensators to Optimize Wind Power Extraction. J. Control Sci. Eng. 2017, 2017, 6375680. [Google Scholar] [CrossRef]
- Novak, P.; Ekelund, T.; Jovik, I.; Schmidtbauer, B. Modeling and Control of Variable-Speed Wind-Turbine Drive-System Dynamics. IEEE Control Syst. Mag. 1995, 15, 28–38. [Google Scholar] [CrossRef]
- Geng, H.; Xu, D.; Wu, B.; Yang, G. Active Damping for PMSG-Based WECS With DC-Link Current Estimation. IEEE Trans. Ind. Electron. 2011, 58, 1110–1119. [Google Scholar] [CrossRef]
- Alizadeh, O.; Yazdani, A. A Strategy for Real Power Control in a Direct-Drive PMSG-Based Wind Energy Conversion System. IEEE Trans. Power Deliv. 2013, 28, 1297–1305. [Google Scholar] [CrossRef]
- Keysan, O. Future Electrical Generator Technologies for Offshore Wind Turbines. Eng. Technol. Ref. 2015, 1, 1–14. [Google Scholar] [CrossRef]
- Bywaters, G.; John, V.; Lynch, J.; Mattila, P.; Norton, G.; Stowell, J.; Salata, M.; Labath, O.; Chertok, A.; Hablanian, D. Northern Power Systems WindPACT Drive Train Alternative Design Study Report; Period of Performance: 12 April 2001 to 31 January 2005; NREL: Golden, CO, USA, 2004. [CrossRef]
- Stork, C.; Butterfield, C.; Holley, W.; Madsen, P.; Jensen, P. Wind Conditions for Wind Turbine Design Proposals for Revision of the IEC 1400-1 Standard. J. Wind. Eng. Ind. Aerodyn. 1998, 74–76, 443–454. [Google Scholar] [CrossRef]
- De Vries, E. Wind Turbine Drive Systems: A Commercial Overview. In Electrical Drives for Direct Drive Renewable Energy Systems; Mueller, M., Polinder, H., Eds.; Woodhead Publishing Series in Energy; Woodhead Publishing: Sawston, UK, 2013; pp. 139–157. [Google Scholar] [CrossRef]
- Dubois, M.R.J. Optimized Permanent Magnet Generator Topologies for Direct-Drive Wind Turbines. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2004. [Google Scholar]
- Lampola, P. Directly Driven, Low-Speed Permanent-Magnet Generators for Wind Power Applications. Ph.D. Thesis, Helsinki University of Technology, Espoo, Finland, 2000. [Google Scholar]
- Spooner, E.; Gordon, P.; French, C. Lightweight, Ironless-stator, PM Generators for Direct-Drive Wind Turbines. In Proceedings of the Second International Conference on Power Electronics, Machines and Drives (PEMD 2004), Edinburgh, UK, 31 March–2 April 2004; Volume 1, pp. 29–33. [Google Scholar] [CrossRef]
- Coey, J. Permanent Magnet Applications. J. Magn. Magn. Mater. 2002, 248, 441–456. [Google Scholar] [CrossRef]
- Eklund, P.; Eriksson, S. The Influence of Permanent Magnet Material Properties on Generator Rotor Design. Energies 2019, 12, 1314. [Google Scholar] [CrossRef]
- Liu, Y. Design of a Superconducting DC Wind Generator. Ph.D. Thesis, Karlsruher Institut für Technologie (KIT), Karlsruhe, Germany, 2018. [Google Scholar] [CrossRef]
- Dehlinger, N. Étude des Performances d’une Machine à Flux Transverse à Noyaux Ferromagnétiques Amorphes. Ph.D. Thesis, Université Laval, Québec, QC, Canada, 2007. [Google Scholar]
- Spooner, E.; Gordon, P.; Bumby, J.; French, C. Lightweight Ironless-Stator PM Generators for Direct-Drive Wind Turbines. IEE Proc.—Electr. Power Appl. 2005, 152, 17. [Google Scholar] [CrossRef]
- Bang, D.; Polinder, H.; Shrestha, G.; Ferreira, J.A. Review of Generator Systems for Direct-Drive Wind Turbines; European Wind Energy Conference & Exhibition: Brussels, Belgium, 2008. [Google Scholar]
- Mueller, M.; Zavvos, A. Electrical Generators for Direct Drive Ssystems: A Technology Overview. In Electrical Drives for Direct Drive Renewable Energy Systems; Mueller, M., Polinder, H., Eds.; Woodhead Publishing Series in Energy; Woodhead Publishing: Sawston, UK, 2013; pp. 3–29. [Google Scholar] [CrossRef]
- Spooner, E.; Williamson, A. Direct Coupled, Permanent Magnet Generators for Wind Turbine Applications. Electr. Power Appl. IEE Proc. 1996, 143, 1–8. [Google Scholar] [CrossRef]
- Zhao, C.; Zhu, D.; Yan, Y. The Optimization Of Auxiliary Poles of IPM Synchronous Machine. In Proceedings of the 2005 International Conference on Electrical Machines and Systems, Nanjing, China, 27–29 September 2005; Volume 1, pp. 344–349. [Google Scholar] [CrossRef]
- Libert, F. Design, Optimization and Comparison of Permanent Magnet Motors for a Low-Speed Direct-Driven Mixer. Ph.D. Thesis, Department of Electrical Engineering, Royal Institute of Technology, Stockholm, Sweden, 2004. [Google Scholar]
- Teng, W.; Ding, X.; Tang, S.; Xu, J.; Shi, B.; Liu, Y. Vibration Analysis for Fault Detection of Wind Turbine Drivetrains—A Comprehensive Investigation. Sensors 2021, 21, 1686. [Google Scholar] [CrossRef]
- Sitapati, K.; Krishnan, R. Performance Comparisons of Radial and Axial Field, Permanent-Magnet, Brushless Machines. IEEE Trans. Ind. Appl. 2001, 37, 1219–1226. [Google Scholar] [CrossRef]
- Huang, S.; Luo, J.; Leonardi, F.; Lipo, T. A Comparison of Power Density for Axial Flux Machines Based on General Purpose Sizing Equations. IEEE Trans. Energy Convers. 1999, 14, 185–192. [Google Scholar] [CrossRef]
- Zhang, Z.; Nilssen, R.; Muyeen, S.M.; Nysveen, A.; Al-Durra, A. Design Optimization of Ironless Multi-Stage Axial-Flux Permanent Magnet Generators for Offshore Wind Turbines. Eng. Optim. 2017, 49, 815–827. [Google Scholar] [CrossRef]
- Chalmers, B.J.; Spooner, E. An Axial-Flux Permanent-Mmagnet Generator for a Gearless Wind Energy System. IEEE Trans. Energy Convers. 1999, 14, 251–257. [Google Scholar] [CrossRef]
- Gerlando, A.D.; Foglia, G.; Iacchetti, M.F.; Perini, R. Axial Flux PM Machines With Concentrated Armature Windings: Design Analysis and Test Validation of Wind Energy Generators. IEEE Trans. Ind. Electron. 2011, 58, 3795–3805. [Google Scholar] [CrossRef]
- Parviainen, A.; Pyrhonen, J.; Kontkanen, P. Axial Flux Permanent Magnet Generator with Concentrated Winding for Small Wind Power Applications. In Proceedings of the IEEE International Conference on Electric Machines and Drives, San Antonio, TX, USA, 15 May 2005; pp. 1187–1191. [Google Scholar] [CrossRef]
- Wu, W.; Spooner, E.; Chalmers, B. Design of Slotless TORUS Generators with Reduced Voltage Regulation. IEE Proc. Elect. Power Appl. 1995, 142, 337–343. [Google Scholar] [CrossRef]
- Chen, Y.; Pillay, P. Axial-flux PM Wind Generator with a Soft Magnetic Composite Core. In Proceedings of the Fourtieth IAS Annual Meeting. Conference Record of the 2005 Industry Applications Conference, Kowloon, Hong Kong, China, 2–6 October 2005; Volume 1, pp. 231–237. [Google Scholar] [CrossRef]
- Chen, Y.; Pillay, P.; Khan, A. PM Wind Generator Topologies. IEEE Trans. Ind. Appl. 2005, 41, 1619–1626. [Google Scholar] [CrossRef]
- Mueller, M.; McDonald, A.; Macpherson, D. Structural Analysis of Low-Speed Axial-Flux Permanent Magnet Machines. IEE Proc.—Electr. Power Appl. 2005, 152, 1417. [Google Scholar] [CrossRef]
- McDonald, A.S.; Al-Khayat, N.; Belshaw, D.; Ravilious, M.; Kumaraperumal, A.; Benatamane, A.M.; Galbraith, M.; Staton, D.; Benoit, K.; Mueller, M. 1MW Multi-Stage Air-Cored Ppermanent Magnet Generator for Wind Turbines. In Proceedings of the 6th IET International Conference on Power Electronics, Machines and Drives (PEMD 2012), Bristol, UK, 27–29 March 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Rapin, M.; Noel, J.M. Énergie Eolienne: Du Petit Eolien à l’Eolien offshore, 2nd ed.; ADEME: Montrouge, France, 2016. [Google Scholar]
- Hasubek, B.E. Analysis and Design of Passive Rotor Transverse Flux machines with Permanent Magnets on the Stator. Ph.D. Thesis, University of Calgary, Calgary, AB, Canada, 2000. [Google Scholar]
- Dubois, M.; Polinder, H. Study of TFPM Machines With Toothed Rotor Applied to Direct-Drive Generators for Wind Turbines; Nordic Workshop on Power and Industrial Electronics: Trondheim, Norway, 2004. [Google Scholar]
- Chang, J.; Kang, D.; Lee, J.; Hong, J. Development of Transverse Flux Linear Motor with Permanent Magnet Excitation for Direct Drive Applications. IEEE Trans. Magn. 2005, 41, 1936–1939. [Google Scholar] [CrossRef]
- Polinder, H.; Bang, D.J.; Li, H.; Chen, Z.; Mueller, M.; McDonald, A. Concept Report on Generator Topologies, Mechanical & Electromagnetic Optimization; Technical Report; Delft University of Technology: Delft, The Netherlands, 2007. [Google Scholar]
- Harris, M.; Pajooman, G.; Abu Sharkh, S. The Problem of Power Factor in VRPM (transverse-flux) Machines. In Proceedings of the Eighth International Conference on Electrical Machines and Drives (Conf. Publ. No. 444), Cambridge, UK, 1–3 September 1997; pp. 386–390. [Google Scholar] [CrossRef]
- Anglada, J.R.; Sharkh, S.M. An Insight Into Torque Production and Power Factor in Transverse-Flux Machines. IEEE Trans. Ind. Appl. 2017, 53, 1971–1977. [Google Scholar] [CrossRef]
- Wang, J.; Chau, K.T.; Jiang, J.Z.; Yu, C. Design and Analysis of a Transverse Flux Permanent Magnet Machine Using Three-Dimensional Scalar Magnetic Potential Finite Flement Method. J. Appl. Phys. 2008, 103, 07F107. [Google Scholar] [CrossRef]
- Matsch, L. Electromagnetic and Electromechanical Machines; Harper & Row: New York, NY, USA, 1986. [Google Scholar]
- Anglada, J.R.; Sharkh, S.M. Analysis of Transverse Flux Machines Using a Virtual Mutual Inductance Approach. IEEE Trans. Energy Convers. 2018, 33, 465–472. [Google Scholar] [CrossRef]
- Ahmed, A.; Husain, I. Power Factor Improvement of a Transverse Flux Machine With High Torque Density. IEEE Trans. Ind. Appl. 2018, 54, 4297–4305. [Google Scholar] [CrossRef]
- Dubois, M.; Polinder, H.; Ferreira, J. Influence of Air Gap Thickness in Transverse Flux Permanent Magnet (TFPM) Generators for Wind Turbine Application; IEEE Benelux Chapter Young Researchers Symposium: Leuven, Belgium, 2002. [Google Scholar]
- Je Bang, D.; Polinder, H.; Shrestha, G.; Ferreira, J.A. Comparative Design of Radial and Transverse Flux PM Generators for Direct-Drive Wind Turbines. In Proceedings of the IEEE 2008 18th International Conference on Electrical Machines, Vilamoura, Portugal, 6–9 September 2008. [Google Scholar] [CrossRef]
- Kumar, R.; Zhu, Z.Q.; Duke, A.; Thomas, A.; Clark, R.; Azar, Z.; Wu, Z.Y. A Review on Transverse Flux Permanent Magnet Machines for Wind Power Applications. IEEE Access 2020, 8, 216543–216565. [Google Scholar] [CrossRef]
- Viktor, G.; Dobzhanskyi, O.; Rostislav, G.; Gouws, R. Improvement of Transverse-Flux Machine Characteristics by Finding an Optimal Air-Gap Diameter and Coil Cross-Section at the Given Magneto-Motive Force of the PMs. Energies 2021, 14, 755. [Google Scholar] [CrossRef]
- Maddison, C.P. Transverse Flux Machines for High Torque Applications. Ph.D. Thesis, Newcastle University, Newcastle upon Tyne, UK, 1999. [Google Scholar]
- Weh, H. Transverse-Flux Machines in Drive and Generator Aapplication. In Proceedings of the IEEE Symposium on Electric Power Engineering (Stockholm Power Tech), Strockholm, Sweden, 18–22 June 1995; pp. 75–80. [Google Scholar]
- Ballestín-Bernad, V.; Artal-Sevil, J.S.; Domínguez-Navarro, J.A. A Review of Transverse Flux Machines Topologies and Design. Energies 2021, 14, 7173. [Google Scholar] [CrossRef]
- Deok-JE, B. Design of Transverse Flux PermanentMagnet Machines for Large Direct-DriveWind Turbines. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2010. [Google Scholar]
- Svechkzrenko, D. On Analytical Modeling and Design of a Novel Transverse Flux Generator for Offshore Wind Turbines. Ph.D. Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2007. [Google Scholar]
- Bang, D.J.; Polinder, H.; Shrestha, G.; Ferreira, J.A. Design of a Lightweight Transverse Flux Permanent Magnet Machine for Direct-Drive Wind Turbines. In Proceedings of the 2008 IEEE Industry Applications Society Annual Meeting, Las Vegas, NV, USA, 7–11 October 2008; pp. 1–7. [Google Scholar] [CrossRef]
- Jiang, Z. Installation of Offshore Wind Turbines: A Technical Review. Renew. Sustain. Energy Rev. 2021, 139, 110576. [Google Scholar] [CrossRef]
- Heavy Lift Crane Series—Shaping Tomorrows Energy. Available online: https://www.liebherr.com/en/int/products/maritime-cranes/offshore-cranes/heavy-lift-crane/heavy-lift-crane.html (accessed on 10 April 2021).
- Muljadi, E.; Green, J. Cogging Torque Reduction in a Permanent Magnet Wind Turbine Generator. In Proceedings of the ASME 2002 Wind Energy Symposium. ASMEDC, Reno, NV, USA, 14–17 January 2002. [Google Scholar] [CrossRef]
- Polinder, H. Principles of Electrical Design of Permanent Magnet Generators for Direct Drive Renewable Energy Systems. In Electrical Drives for Direct Drive Renewable Energy Systems; Mueller, M., Polinder, H., Eds.; Woodhead Publishing Series in Energy; Woodhead Publishing: Sawston, UK, 2013; pp. 30–50. [Google Scholar] [CrossRef]
- Ruuskanen, V. Design Aspects of Megawatt-Range Direct-Driven Permanent Magnet Wind Generators. Ph.D. Thesis, Lappeenranta University of Technology, Lappeenranta, Finland, 2011. [Google Scholar]
- Meier, F. Permanent Magnet Synchronous Machines with Non-Overlapping ConcentratedWindings for Low-Speed Direct-Drive Applications; School of Electrical Engineering, Electrical Machines and Power Electronics: Stockholm, Sweden, 2008. [Google Scholar]
- Dubois, M.; Polinder, H.; Ferreira, J. Comparison of Generator Topologies for Direct-Drive Wind Turbines. In Proceedings of the Nordic Countries Power and Industrial Electronics Conference (NORPIE), Aalborg, Denmark, 13–16 June 2000. [Google Scholar]
- Shrestha, G.; Polinder, H.; Ferreira, J. Scaling Laws for Direct Drive Generators in Wind Turbines. In Proceedings of the 2009 IEEE International Electric Machines and Drives Conference, Miami, FL, USA, 3–6 May 2009; pp. 797–803. [Google Scholar] [CrossRef]
- Grauers, A.; Kasinathan, P. Force Density Limits in Low-Speed PM Machines Due toTemperature and Reactance. IEEE Trans. Energy Convers. 2004, 19, 518–525. [Google Scholar] [CrossRef]
- Semken, R.S.; Polikarpova, M.; Roytta, P.; Alexandrova, J.; Pyrhonen, J.; Nerg, J.; Mikkola, A.; Backman, J. Direct-Drive Permanent Magnet Generators for High-Power Wind Turbines: Benefits and Limiting Factors. IET Renew. Power Gener. 2012, 6, 1. [Google Scholar] [CrossRef]
- Kim, C.; Sung, H.J.; Go, B.S.; Sim, K.; Nam, G.D.; Kim, S.; Park, M. Design, Fabrication, and Testing of a Full-Scale HTS Coil for a 10 MW HTS Wind Power Generator. IEEE Trans. Appl. Supercond. 2021, 31, 1–5. [Google Scholar] [CrossRef]
- Seo, G.; Mun, J.; Kim, D.; Park, M.; Kim, S. Neon-Helium Hybrid Cooling System for a 10 MW Class Superconducting Wind Power Generator. IEEE Trans. Appl. Supercond. 2021, 31, 1–5. [Google Scholar] [CrossRef]
- AMSC. Concepts for High Power Wind Turbines Introducing HTS Technology. In Proceedings of the World Green Energy Forum 2010, Gyeongju City, Korea, 17–19 November 2010. [Google Scholar]
- Cheng, Y.; Zhang, Y.; Qu, R.; Li, D.; Liu, Y.; Noe, M. Design and Analysis of 10 MW HTS Double-Stator Flux-Modulation Generator for Wind Turbine. IEEE Trans. Appl. Supercond. 2021, 31, 1–8. [Google Scholar] [CrossRef]
- Xu, Y.; Maki, N.; Izumi, M. Performance Comparison of 10-MW Wind Turbine Generators With HTS, Copper, and PM Excitation. IEEE Trans. Appl. Supercond. 2015, 25, 1–6. [Google Scholar] [CrossRef]
- Marino, I.; Pujana, A.; Sarmiento, G.; Sanz, S.; Merino, J.M.; Tropeano, M.; Sun, J.; Canosa, T. Lightweight MgB 2 Superconducting 10 MW Wind Generator. Supercond. Sci. Technol. 2016, 29, 024005. [Google Scholar] [CrossRef]
- Shafaie, R.; Kalantar, M. Design of a 10-MW-Class Wind Turbine HTS Synchronous Generator With Optimized Field Winding. IEEE Trans. Appl. Supercond. 2013, 23, 5202307. [Google Scholar] [CrossRef]
- Karmaker, H.; Ho, M.; Kulkarni, D. Comparison Between Different Design Topologies for Multi-Megawatt Direct Drive Wind Generators Using Improved Second Generation High Temperature Superconductors. IEEE Trans. Appl. Supercond. 2015, 25, 1–5. [Google Scholar] [CrossRef]
- Sung, H.J.; Kim, G.H.; Kim, K.; Jung, S.J.; Park, M.; Yu, I.K.; Kim, Y.G.; Lee, H.; Kim, A.R. Practical Design of a 10 MW Superconducting Wind Power Generator Considering Weight Issue. IEEE Trans. Appl. Supercond. 2013, 23, 5201805. [Google Scholar] [CrossRef]
- Wang, J.; Qu, R.; Tang, Y.; Liu, Y.; Zhang, B.; He, J.; Zhu, Z.; Fang, H.; Su, L. Design of a Superconducting Synchronous Generator With LTS Field Windings for 12 MW Offshore Direct-Drive Wind Turbines. IEEE Trans. Ind. Electron. 2016, 63, 1618–1628. [Google Scholar] [CrossRef]
- Fair, R.; Stautner, W.; Douglass, M.; Rajput-Ghoshal, R.; Moscinski, M.; Riley, P.; Wagner, D.; Kim, J.; Hou, S.; Lopez, F.; et al. Next Generation Drive Train: Superconductivity for Large-ScaleWind Turbines. In Proceedings of the Applied Superconductivity Conference, Portland, OR, USA, 18 November 2012. [Google Scholar]
- Laskaris, E.T.; Sivasubramaniam, K. Method and Apparatus for a Superconducting Generator Driven by Wind Turbine. U.S. Patent 2008/0197633 A1, 26 October 2008. [Google Scholar]
- Stautner, E.W.; Vermilyea, M.E.; Kagan, A. Superconducting Generator Driven by a Wind Turbine. U.S. Patent 2020/112075 A1, 13 January 2020. [Google Scholar]
- Prince, V. Large-Scale Wind Energy Systems: 10 MW and Beyond. In Proceedings of the World Future Energy Summit 2015, Abu Dhabi, United Arab Emirates, 19–22 January 2015. [Google Scholar]
- Song, X.; Bührer, C.; Brutsaert, P.; Ammar, A.; Krause, J.; Bergen, A.; Winkler, T.; Dhalle, M.; Hansen, J.; Rebsdorf, A.V.; et al. Ground Testing of the World’s First MW-Class Direct-Drive Superconducting Wind Turbine Generator. IEEE Trans. Energy Convers. 2020, 35, 757–764. [Google Scholar] [CrossRef]
- Li, H.; Chen, Z.; Polinder, H. Optimization of Multibrid Permanent-Magnet Wind Generator Systems. IEEE Trans. Energy Convers. 2009, 24, 82–92. [Google Scholar] [CrossRef]
- Mikhail, A.S.; Cousineau, K.L.; Howes, L.H.; Erdman, W.; Holley, W. Variable Speed Distributed Drive Train Wind Turbine System. U.S. Patent 7042110B2, 9 May 2005. [Google Scholar]
- Thresher, R.; Laxson, A. Advanced Wind Technology: New Challenges for a New Century. In Proceedings of the European Wind Energy Conference, Athens, Greece, 27 February–2 March 2006. [Google Scholar]
- Shrestha, G.; Polinder, H.; Bang, D.J.; Ferreira, J.A. Structural Flexibility: A Solution for Weight Reduction of Large Direct-Drive Wind-Turbine Generators. IEEE Trans. Energy Convers. 2010, 25, 732–740. [Google Scholar] [CrossRef]
- Miller, W.; Zhuang, L.; Bottema, J.; Wittebrood, A.; De Smet, P.; Haszler, A.; Vieregge, A. Recent Development in Aluminium Alloys for the Automotive Industry. Mater. Sci. Eng. A 2000, 280, 37–49. [Google Scholar] [CrossRef]
- ENERCON. ENERCON: Product Protfolio; Technical Report; ENERCON Energy for the World: Aurich, Germany, 2019. [Google Scholar]
- ENERCON. Performance Increase in 3 MW Class; Technical Report; ENERCON Magazine: Aurich, Germany, 2017. [Google Scholar]
- Zhang, Z.; Matveev, A.; Nilssen, R.; Nysveen, A. Ironless Permanent-Magnet Generators for Offshore Wind Turbines. IEEE Trans. Ind. Appl. 2014, 50, 1835–1846. [Google Scholar] [CrossRef]
- Mueller, M.A.; McDonald, A.S. A Lightweight Low-Speed Permanent Magnet Electrical Generator for Direct-Drive Wind Turbines. Wind Energy 2009, 12, 768–780. [Google Scholar] [CrossRef]
- Engstrom, S.; Lindgren, S. Design of NewGen Direct Drive Generator for Demonstration in a 3.5 MW Wind Turbine. In Proceedings of the EWEC (European Wind Energy Conference & Exhibition, Milan, Italy, 7–10 May 2007. [Google Scholar]
- Spooner, E.; Williamson, A. Modular, Permanent Magnet Wind Turbine Generators. In Proceedings of the IAS ’96. Conference Record of the 1996 IEEE Industry Applications Conference Thirty-First IAS Annual Meeting, San Diego, CA, USA, 6–10 October 1996; Volume 1, pp. 497–502. [Google Scholar] [CrossRef]
- Shipurkar, U.; Polinder, H.; Ferreira, J.A. Modularity in Wind Turbine Generator Systems—Opportunities and Challenges. In Proceedings of the 2016 18th European Conference on Power Electronics and Applications (EPE’16 ECCE Europe), Karlsruhe, Germany, 5–9 September 2016; pp. 1–10. [Google Scholar] [CrossRef]
- Chen, Z.; Spooner, E. A Modular, Permanent Magnet Generator for Variable Speed Wind Turbines. In Proceedings of the 1995 Seventh International Conference on Electrical Machines and Drives (Conf. Publ. No. 412), Durham, UK, 11–13 September 1995; pp. 453–457. [Google Scholar] [CrossRef]
- Eriksson, S.; Bernhoff, H. Rotor Design for PM Generators Reflecting the Unstable Neodymium Price. In Proceedings of the 2012 XXth International Conference on Electrical Machines, Marseille, France, 2–5 September 2012; pp. 1419–1423. [Google Scholar] [CrossRef] [Green Version]
- Danielsson, O.; Thorburn, K.; Eriksson, M.; Leijon, M. Permanent Magnet Fixation Concepts for Linear Generator. In Proceedings of the Fifth European Wave Energy Conference, Cork, Irlanda, 17–20 September 2007. [Google Scholar]
- Azim, B.N.; Alasdair, M. Assessment of the Suitability of Ferrite Magnet Excited Synchronous Generators for Offshore Wind Turbines. In Proceedings of the EWEA Offshore, Copenhagen, Denmark, 10–12 March 2015. [Google Scholar]
- Khazdozian, H.A. Improved Design of Permanent Magnet Generators for Large Scale Wind Turbines. Ph.D. Thesis, Iowa State University, Ames, IA, USA, 2016. [Google Scholar]
- Lutz, J.; Ley, J. Brushless PM Machine Construction Enabling Low Coercivity Magnets. U.S. Patent 8928198 B2, 6 January 2015. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Manufacturer | Wind Turbine | Power Rating (MW) | Wind Farms (Example) | ||
|---|---|---|---|---|---|
| Farms | Number of Turbines | Total Capacity (MW) | |||
| MHI-Vestas | V164-9.5 (offshore) | 9.5 | Northwester II (Belgium) [51] Kincardine II (United Kingdom) [52] Borssele 3&4 (Netherlands) [49] Borssele 5 (Netherlands) [49] | 23 5 76 2 | 219 48 722 19 |
| V164-8.4 (offshore) | 8.4 | Windfloat Atlantic (Portugal) [49] | 2 | 17 | |
| V150-5.6 (onshore) | 5.6 | Paskoonharju 2 (Finland) | 21 | 117.6 | |
| Siemens Gamesa | SG 8.0-167 DD (offshore) | 8 | Kaskasi II (Germany) [49] Le Tréport (France) [53] Noirmoutier (France) [54] Hornsea II (UK) [55] Borssele 1&2 (Netherlands) [49] | 38 62 62 165 94 | 342 496 496 1320 752 |
| SG 8.4-167 DD (offshore) | 8.4 | Seamade (Belgium) [49] Kriegers Flak (Denmark) [49] | 58 72 | 487 604 | |
| E-126 7.580 (onshore) | 7.5 | Estinnes (Belgium) [56] | 11 | 81 | |
| General Electric | Cypress 5.5-158 (onshore) | 5.5 | Oitis (Brazil) Metsälamminkangas (Finland) | 103 240 | 567 132 |
| NORDEX | N163/5.X | 5.X | Stakraft—Ventos de Santa Eugenia (Brazil) | 91 | 518.3 |
| Wind Turbine | Power Control | Gearbox | Generator | |||
|---|---|---|---|---|---|---|
| Reference Manufacturer | Rated Power [MW] | Stages | Gear Ratio | Type | Voltage [V] | |
| V80-1.8 Vestas | 1.8 | OptiSlip | 3 | 1:112 | SQ | 690 |
| NM72/2000 NegMicon | 1.5–2 | Active-Stall | 3 | 1:84 | SQ | 690 |
| Bonus | 1–2.3 | Active-Stall | 3 | 1:98 | SQ | 690 |
| ECO 80/1670 Ecotècnia | 1–2 | Stall | 3 | 1:100 | SQ | 690 |
| N60/1300 Nordex | 1.3 | Stall | 3 | 1:94.4 | SQ | 690 |
| Wind Turbine | Gearbox | Generator | |||
|---|---|---|---|---|---|
| Reference/Manufacturer | Rated Power (MW) | Stages | Gear Ratio | Type | Voltage (V) |
| PS-1800 RRB Energy | 1.8 | 3 | 1:61 | SCIG | 690 |
| SWT-3.6-120 Siemens | 3.6 | 3 | 1:119 | SCIG | 690 |
| V 126-3.45 MW Vestas | 3.45 | 3 | 1:125.16 | SCIG | 750 |
| Wind Turbine | Gearbox | Generator | |||
|---|---|---|---|---|---|
| Reference Manufacturer | Rated Power (MW) | Stages | Gear Ratio | Type | Voltage (V) |
| N149/4.5 Nordex | 4.5 | 3 | 1:113.5 | DFIG | 660 |
| SG 5.0-145 Siemens | 5.0 | 3 | 1:128.7 | DFIG | 690 |
| SL 6000/155 Sinovel | 6 | 3 | DFIG | 6300 | |
| UP 6000/136 United Power | 6 | DFIG | 6600 | ||
| 6.2M-152 Repower | 6.2 | 3 | 1:116 | DFIG | 6600/660 |
| Remanence (T) [111] | Energy Product (Kj/m3) [111] | Maximal Temperature T (°C) [112] | Price [113] | |
|---|---|---|---|---|
| Ferrites | 0.20–0.46 | 6.4–41.8 | 300 | Cheap |
| SmCo | 0.87–1.19 | 143–251 | 250–350 | Medium |
| NdFeB | 1.08–1.49 | 220–430 | 150 | Expensive |
| Wind Turbine | Rated Power (MW) | Manu- Facturer | Rotor Diameter (m) | Hub Height (m) | Electric Generator | Power Converter | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Manu- Facturer | Rated Power (MW) | Rated Speed (rpm) | Rated Ferquency (Hz) | Rated Current (A)/ Voltage (V) | Insulation Class | Rated Current (A)/ Rated Voltage (V) | |||||
| Haliade-X (Offshore) | 12 | GE Renewable Energy | 220 | 138 | GE | 12.79 | 7.81 | 7.81 | 2 × 1455/ 3220 | F | |
| SG 11.0-200 DD (Offshore) | 11 | Siemens Gamesa | 200 | 140 | Siemens Gamesa | 11–12 | 8.6– 9.1 | 14-15 | 2 × 4900–5000/ 820 | H | 6000/690 |
| SG 8.0-167 DD | 8 | Siemens Gamesa | 167 | 119 | Siemens Gamesa | 8.4–9.4 | 10.3– 10.8 | 12–13 | 2 × 4000/820 | F | 4250/690 |
| SWT-7.0-154 | 7 | Siemens Gamesa | 154 | 120 | Siemens Gamesa | 7–7.35 | 10.3– 10.8 | 12–13 | 1 × 3400/750 | F | 2 × 4000/690 |
| GW 171/6450 | 6.45 | Goldwind | 171 | 109 | Xingjiang Goldwind | 6.9 | 10.7– 12.84 | 10.7 | 1560/720 | F | 5941/690 |
| Wind Turbine | Gearbox | Generator | ||||
|---|---|---|---|---|---|---|
| Reference | Manufacturer | Rated Power [MW] | Stages | Gear Ratio | Type | Voltage [V] |
| M5000-116/135 | Areva | 5 | 1 | 1:10 | PMSG | 3300 |
| WWD-3 D120 | WinWinD | 3 | 2 | PMSG | 690 | |
| G128/5000 | Gamesa | 5 | 2 | 1:41 | PMSG | 690 |
| HTW5.2-136 | Hitachi | 5.2 | 2 | 1:40 (Approx.) | PMSG | 33,000 |
| AD 8-180 | Adwen | 8 | 2 | 1:41 | PMSG | 6600 |
| SCD 8.0MW | Aerodyn | 8 | 2 | 1:27 | EESG | - |
| MySE7.25-158 | Guangdong Mingyang | 7.25 | 2 | 1:23.18 | PMSG | 690 |
| V164-10MW | Vestas | 10 | 2 | 1:40.8 | PMSG | 730 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bensalah, A.; Barakat, G.; Amara, Y. Electrical Generators for Large Wind Turbine: Trends and Challenges. Energies 2022, 15, 6700. https://doi.org/10.3390/en15186700
Bensalah A, Barakat G, Amara Y. Electrical Generators for Large Wind Turbine: Trends and Challenges. Energies. 2022; 15(18):6700. https://doi.org/10.3390/en15186700
Chicago/Turabian StyleBensalah, Amina, Georges Barakat, and Yacine Amara. 2022. "Electrical Generators for Large Wind Turbine: Trends and Challenges" Energies 15, no. 18: 6700. https://doi.org/10.3390/en15186700
APA StyleBensalah, A., Barakat, G., & Amara, Y. (2022). Electrical Generators for Large Wind Turbine: Trends and Challenges. Energies, 15(18), 6700. https://doi.org/10.3390/en15186700