
Real-Time Simulation of a Small Modular Reactor in-the-Loop within Nuclear-Renewable Hybrid Energy Systems



Abstract
:
1. Introduction
1.1. Small Modular Reactors
1.2. Nuclear Power Plant Simulators
1.3. Load following—Modes of Nuclear Power Plant Operation
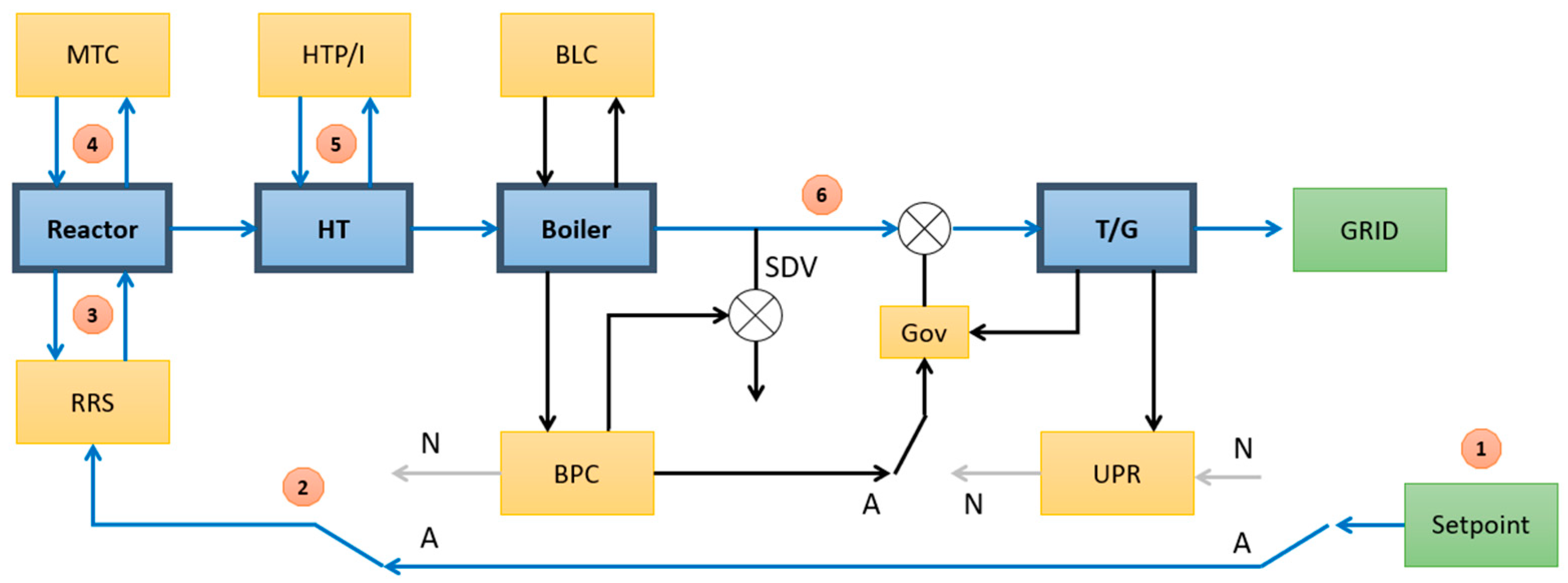
1.3.1. Normal Mode
- The desired value of the generator output is specified by the unit operator (setpoint);
- The unit power regulator (UPR) reads the target value entered by the user (setpoint) and compares it with the actual generator output power (T/G);
- According to the gap between the setpoint value and the output power, the turbine controller changes the opening of the governor valve (Gov) to control the amount of steam entering the turbine;
- Changing the governor valve opening (Gov) also changes the pressure and water level inside the boiler. The boiler level control (BLC) ensures that the amount of water inside the boiler is at the desired level;
- The boiler pressure control (BPC) is responsible for monitoring and controlling the boiler pressure by setting the steam discharge valve (SDV) opening;
- The BPC also calculates the change in the reactor power setpoint and sends a command to the reactor regulating system (RRS) to compute the new setpoint value;
- The RRS compares the demanded power setpoint request from the BPC with the current power of the reactor power and, according to the difference, changes it to the reactivity mechanism using the moderator temperature coefficient (MTC) to mitigate the power error;
- The reactor power variation also affects the heat produced in the reactor’s core and, consequently, the amount of heat transferred (HT) to the steam generator;
- The heat transport system’s pressure and inventory control (HTP/I) is responsible for controlling the heat transport pressure to maintain the pressure at a fixed setpoint (and in some reactors with a pressurizer, the pressurizer level is also controlled).
1.3.2. Alternate Mode
- The desired value of the generator output is specified by the unit operator (setpoint);
- The RRS compares the demanded power setpoint request by the user (setpoint) with the actual power of the reactor power;
- According to the difference, the reactivity mechanism changes using the moderator temperature coefficient (MTC) to mitigate the power error;
- The reactor power variation also affects the heat produced in the reactor’s core and, consequently, the amount of heat transferred (HT) to the steam generator;
- The heat transport system pressure and inventory control (HTP/I) is responsible for controlling the heat transport pressure to maintain the pressure at a fixed setpoint (and in some reactors with a pressurizer, the pressurizer level is also controlled);
- The steam from the boiler then drives the turbine according to the setpoint, resulting in the output power rate according to the desired value.
1.4. Modeling Nuclear Reactors
2. Small Modular Reactor in the Loop
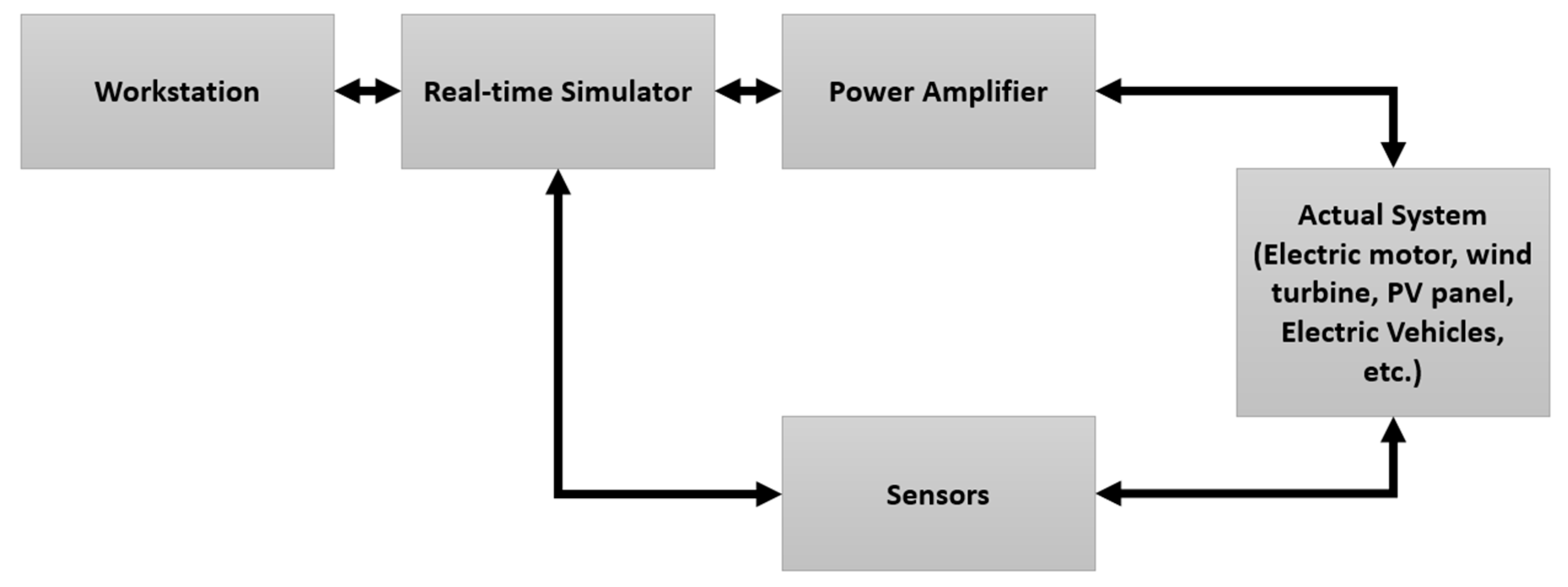
2.1. Hardware-in-the-Loop (HIL)
2.2. SMR-in-the-Loop (SMRiL)
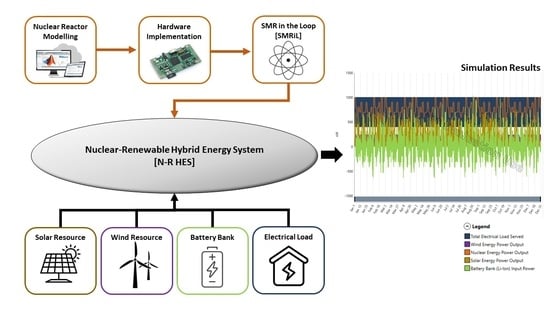
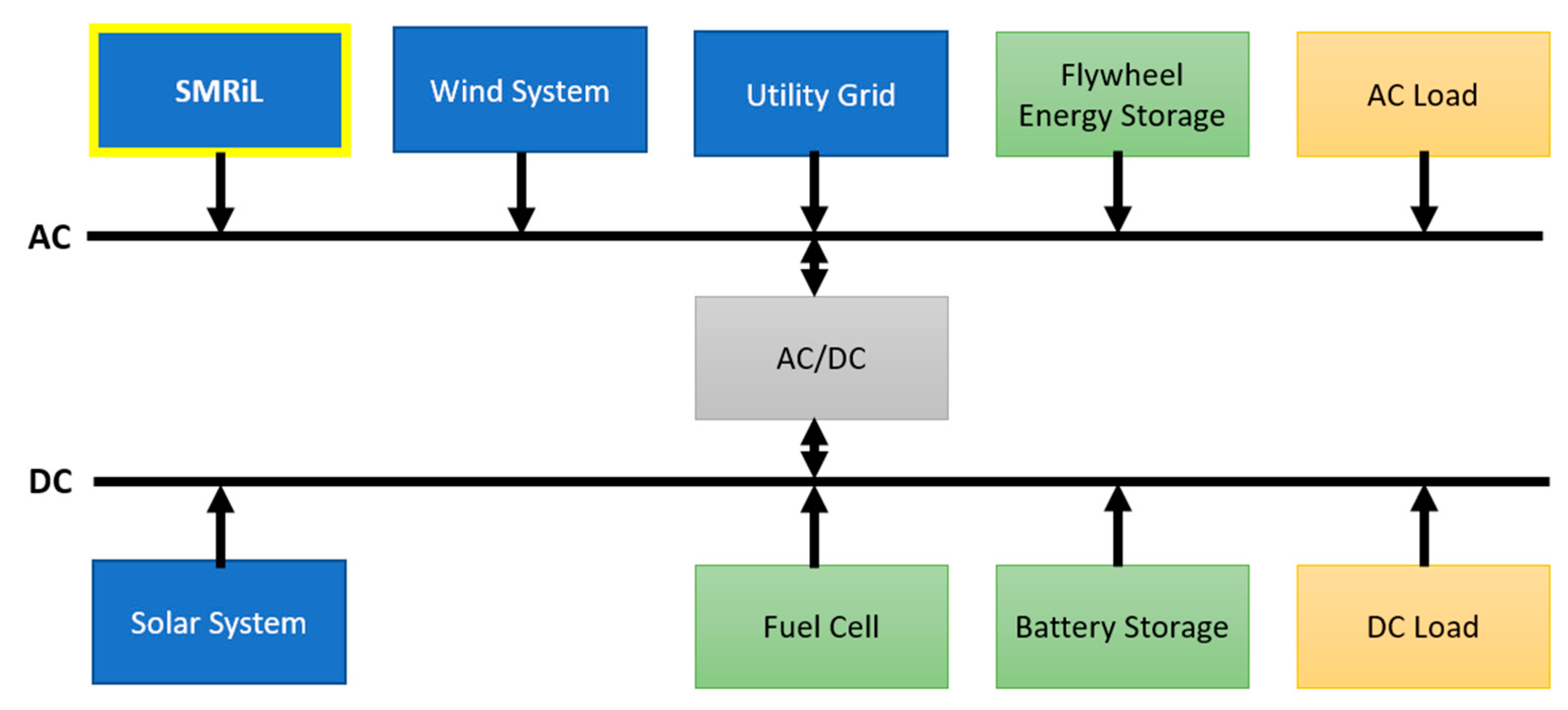
3. Nuclear-Renewable Hybrid Energy Systems
4. Modeling Nuclear Energy Systems
4.1. Reactor Specification
4.2. Reactor Point Kinetic Equation
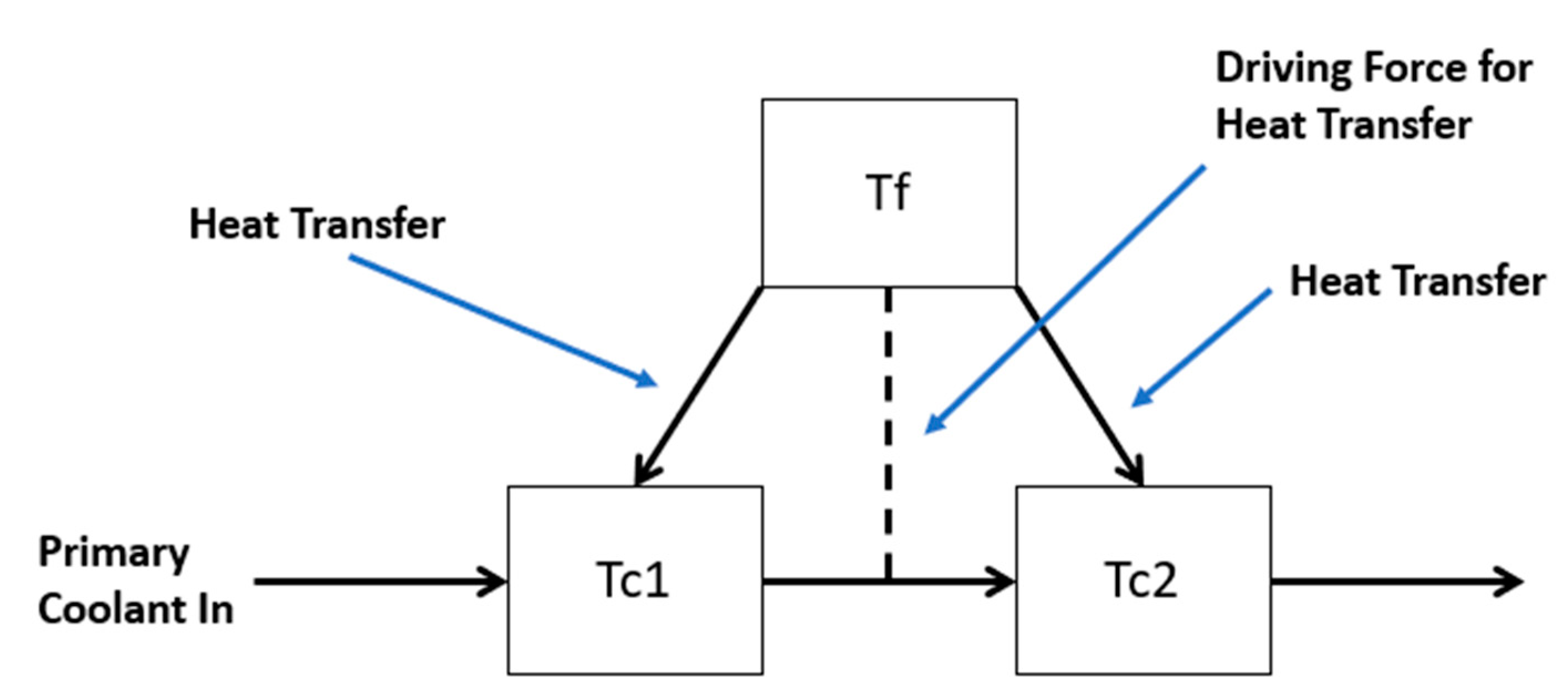
4.3. Reactor Core
- Deviations in the reactor power from the initial steady-state value (5):
- Deviation of the normalized precursor concentration from its steady-state value (6):
- Average fuel temperature (7):
- Average coolant temperature in the ith fuel node (8):
- Outlet coolant temperature in the ith fuel node (9):
4.4. Pressurizer
- Water flow in the pressurizer (10):
- Pressure in the pressurizer (11):
- Integral control action (12):
4.5. Steam Generator
- Primary water–energy balance (13):
- Metal energy balance (14):
- Steam generation pressure (15):
4.6. Piping
- Piping temperature (16):
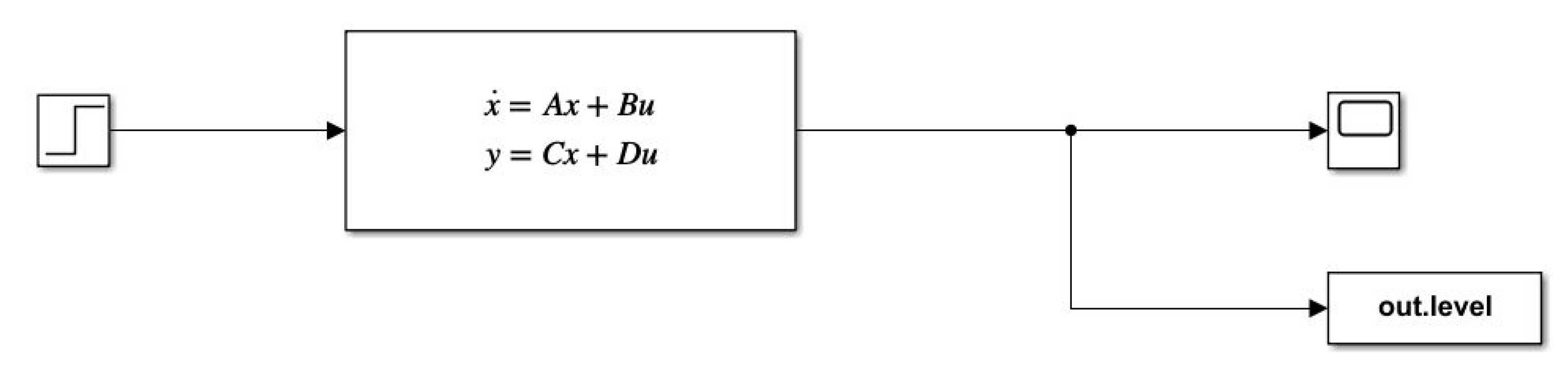
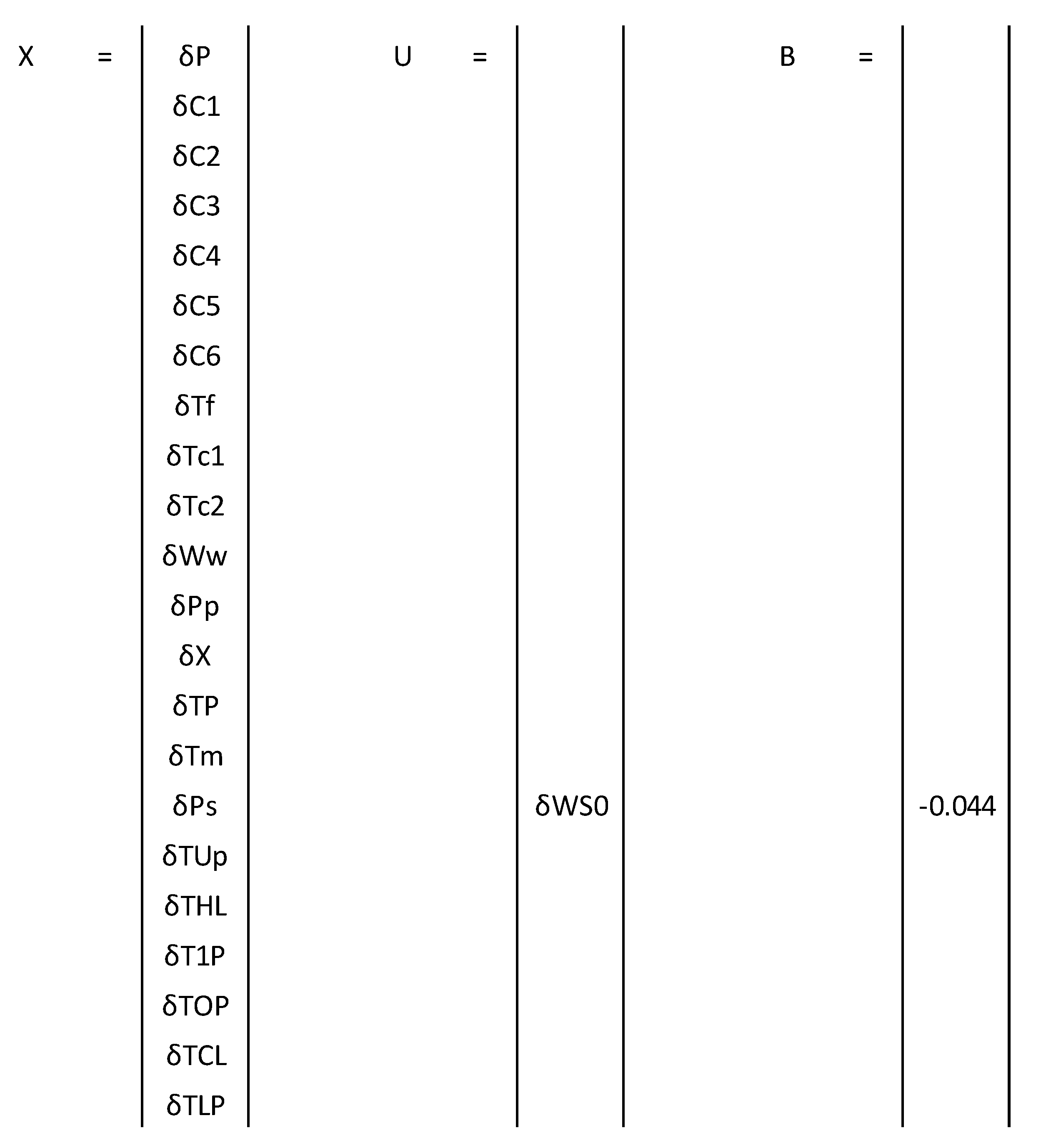
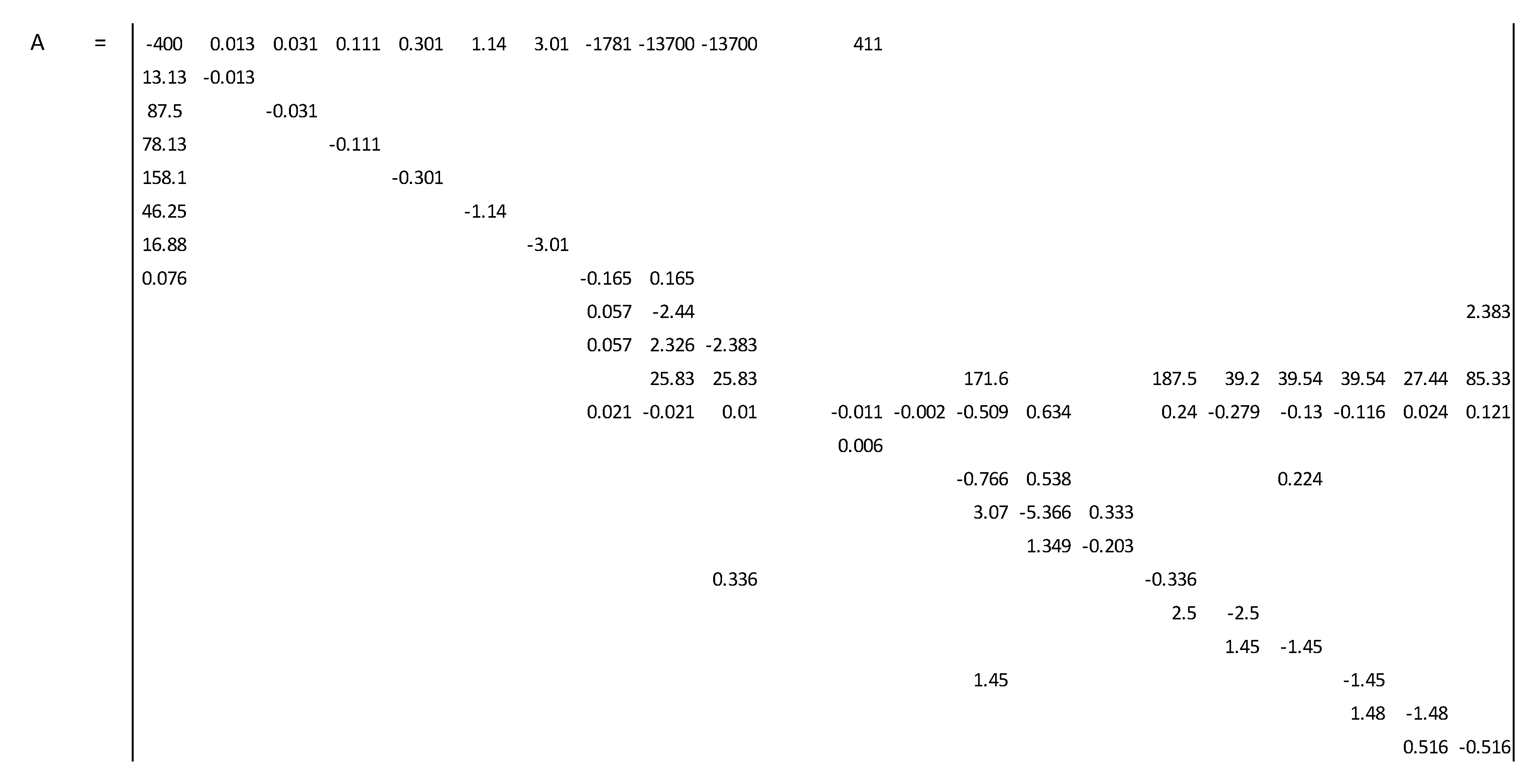
4.7. State-Space Representation of the Dynamic Equations
5. SMRiL Modeling
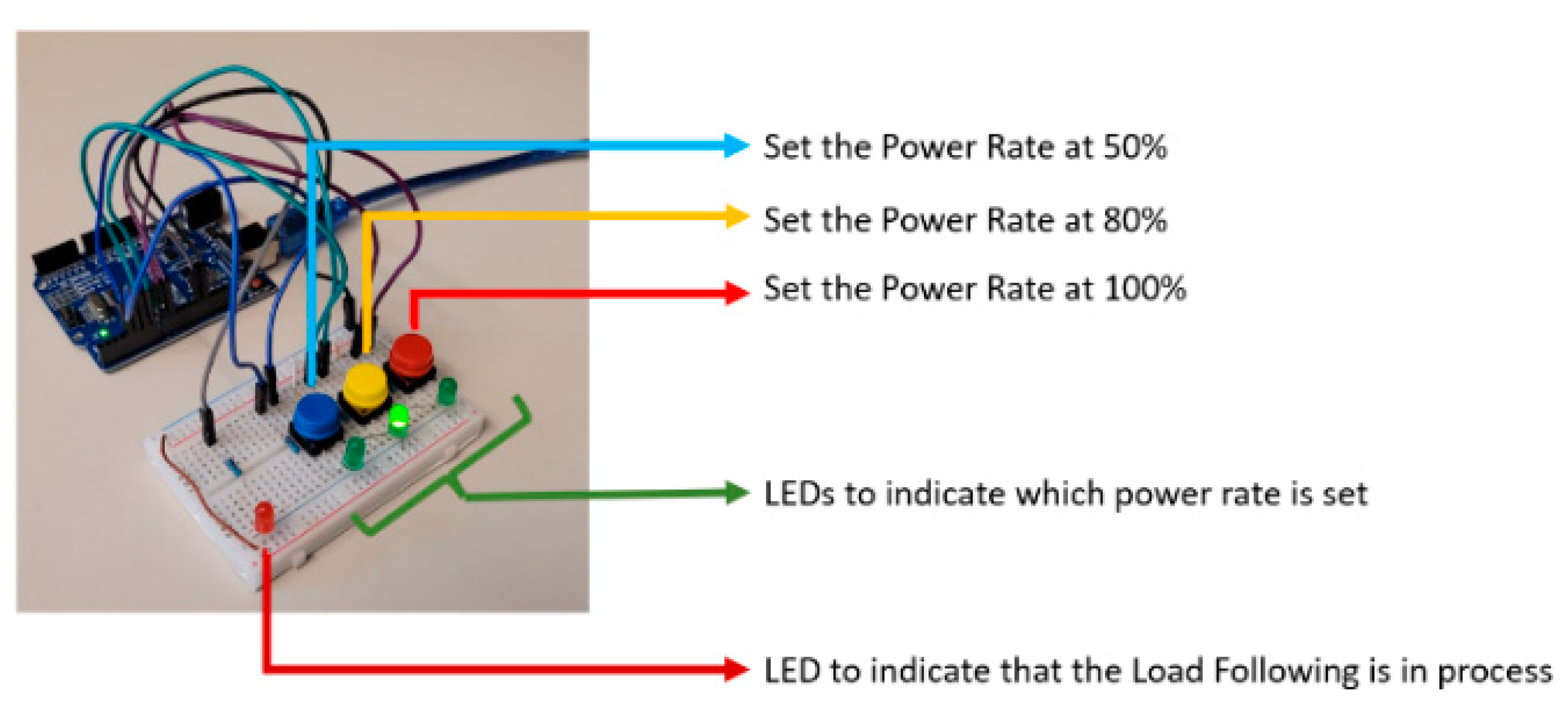
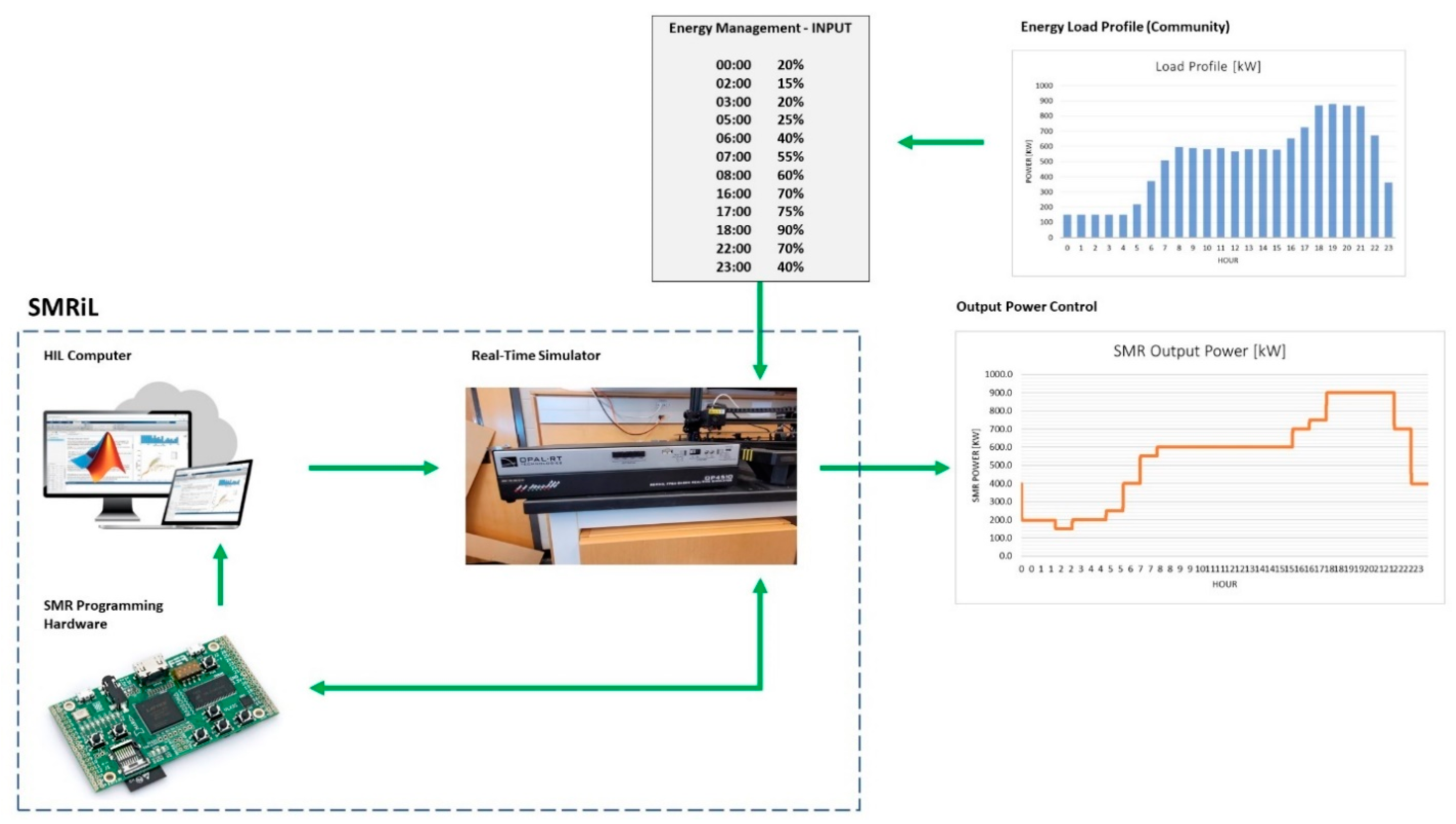
Hardware Integration
6. SMRiL Demonstration and Results
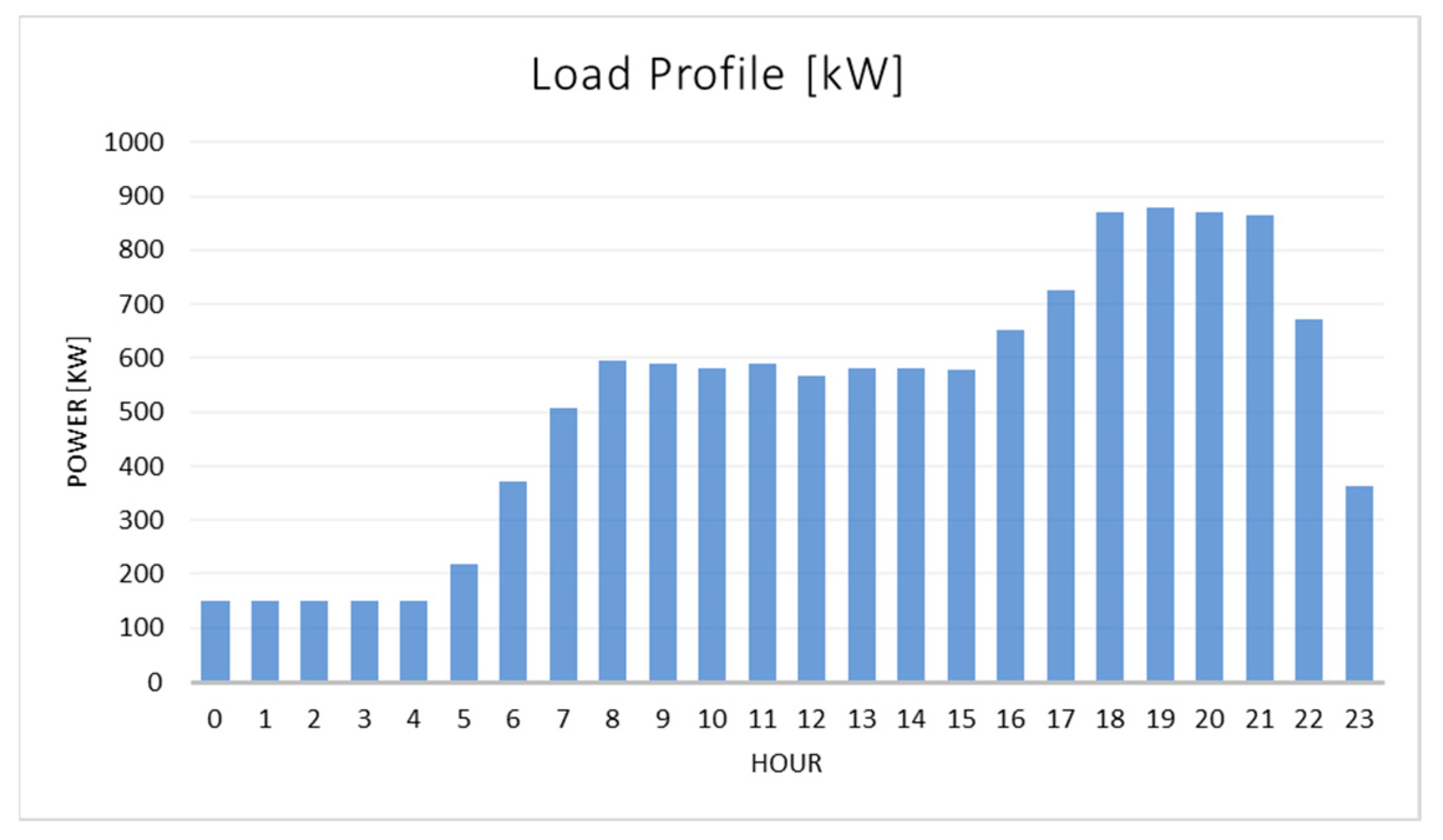
6.1. Energy Profile and Management
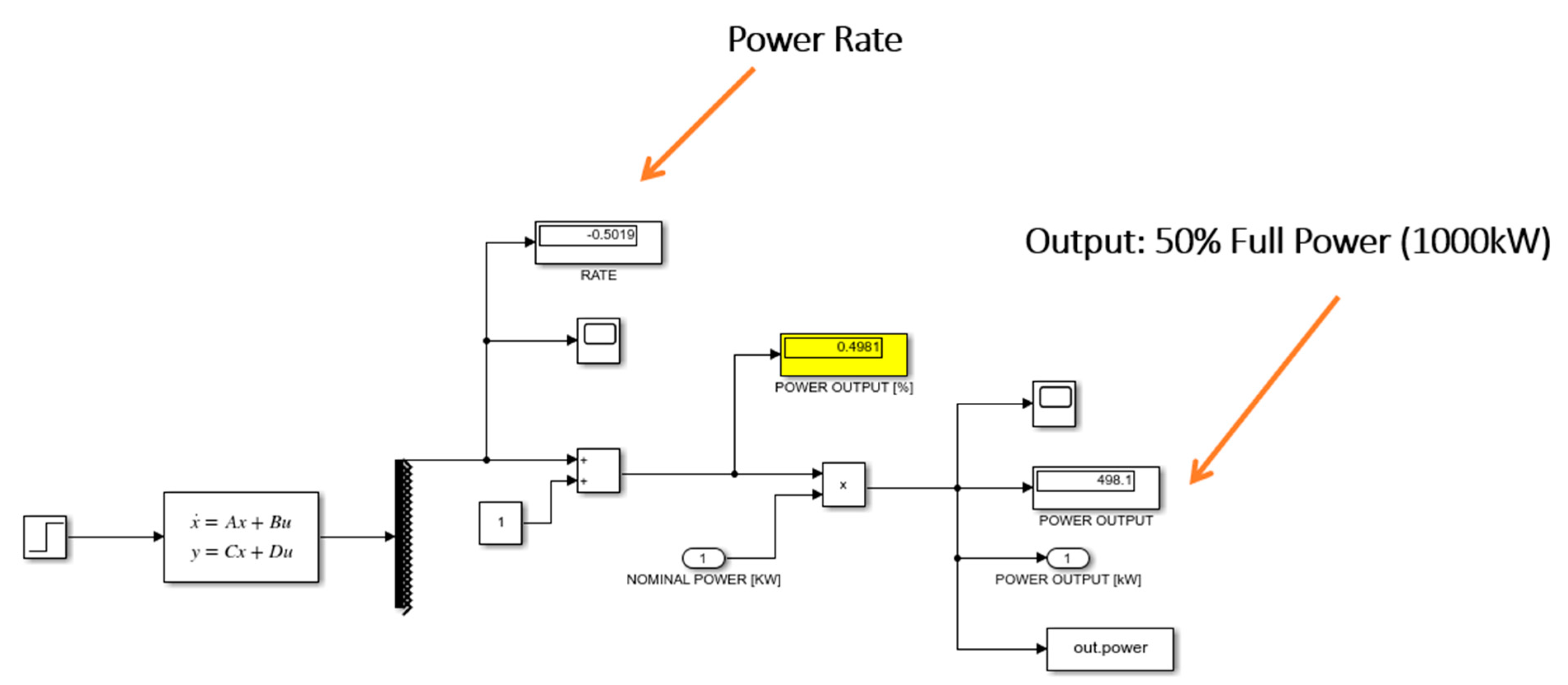
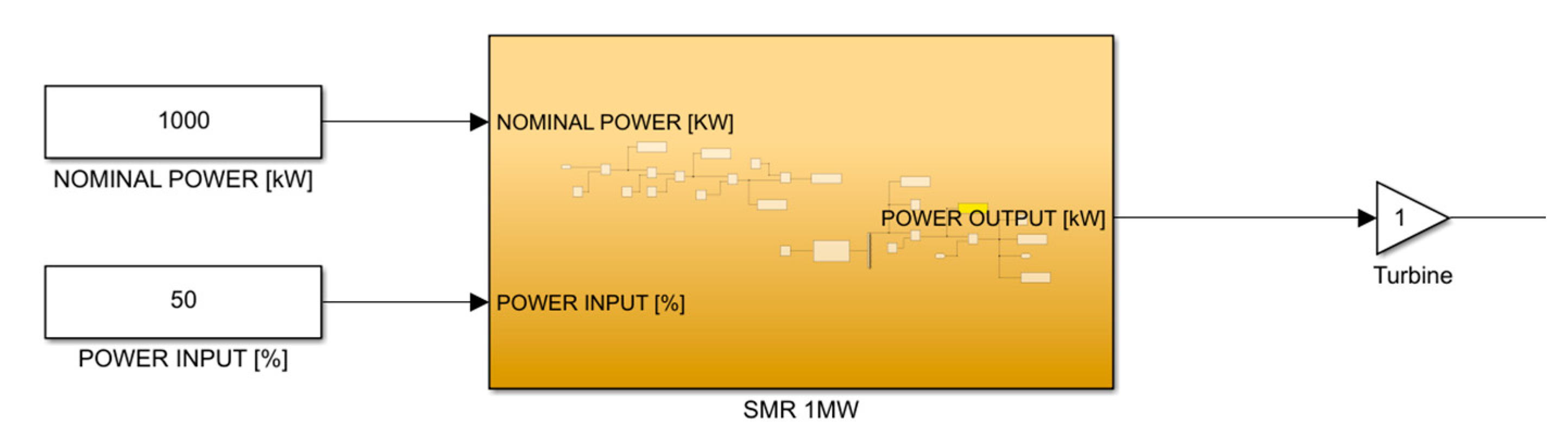
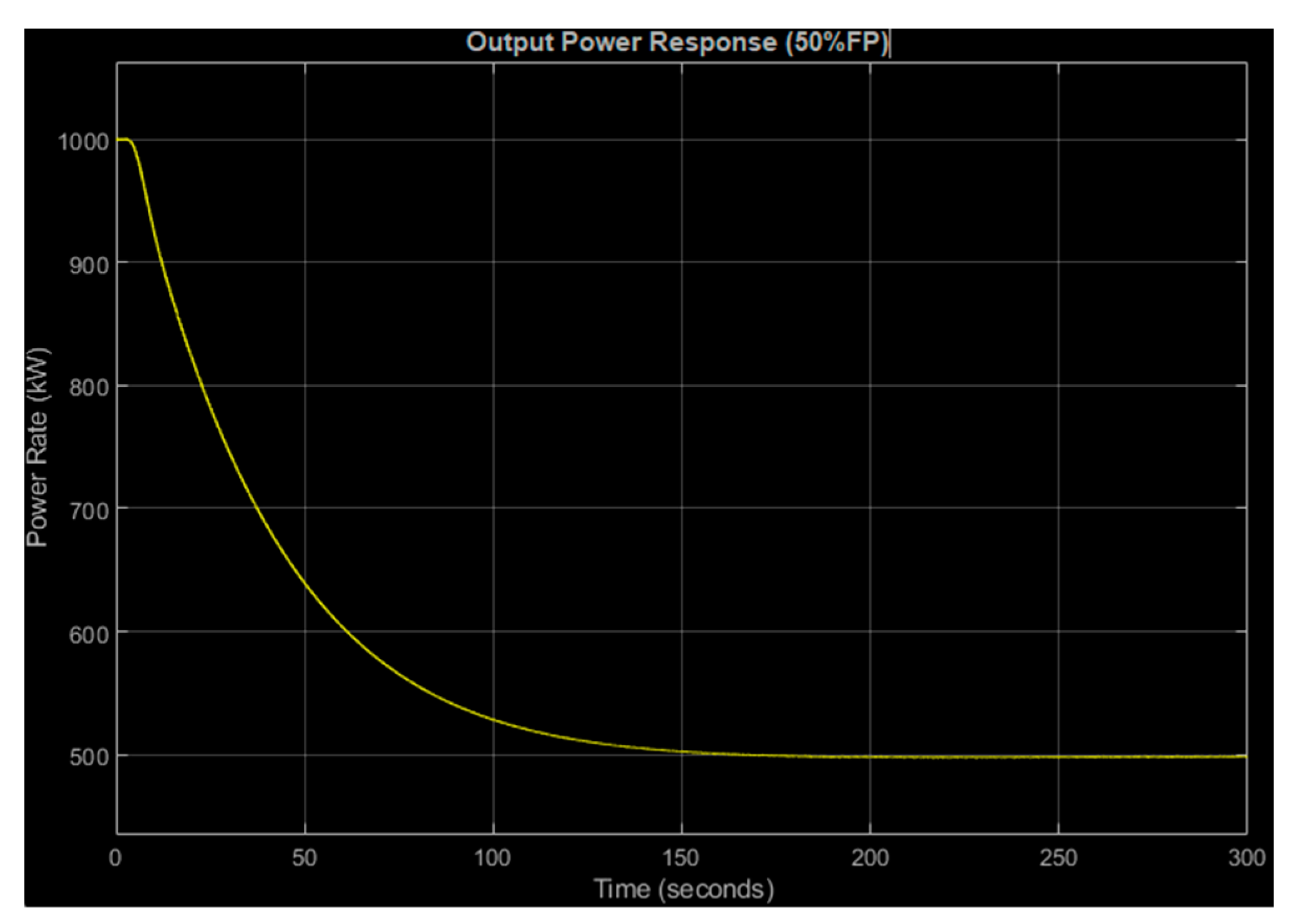
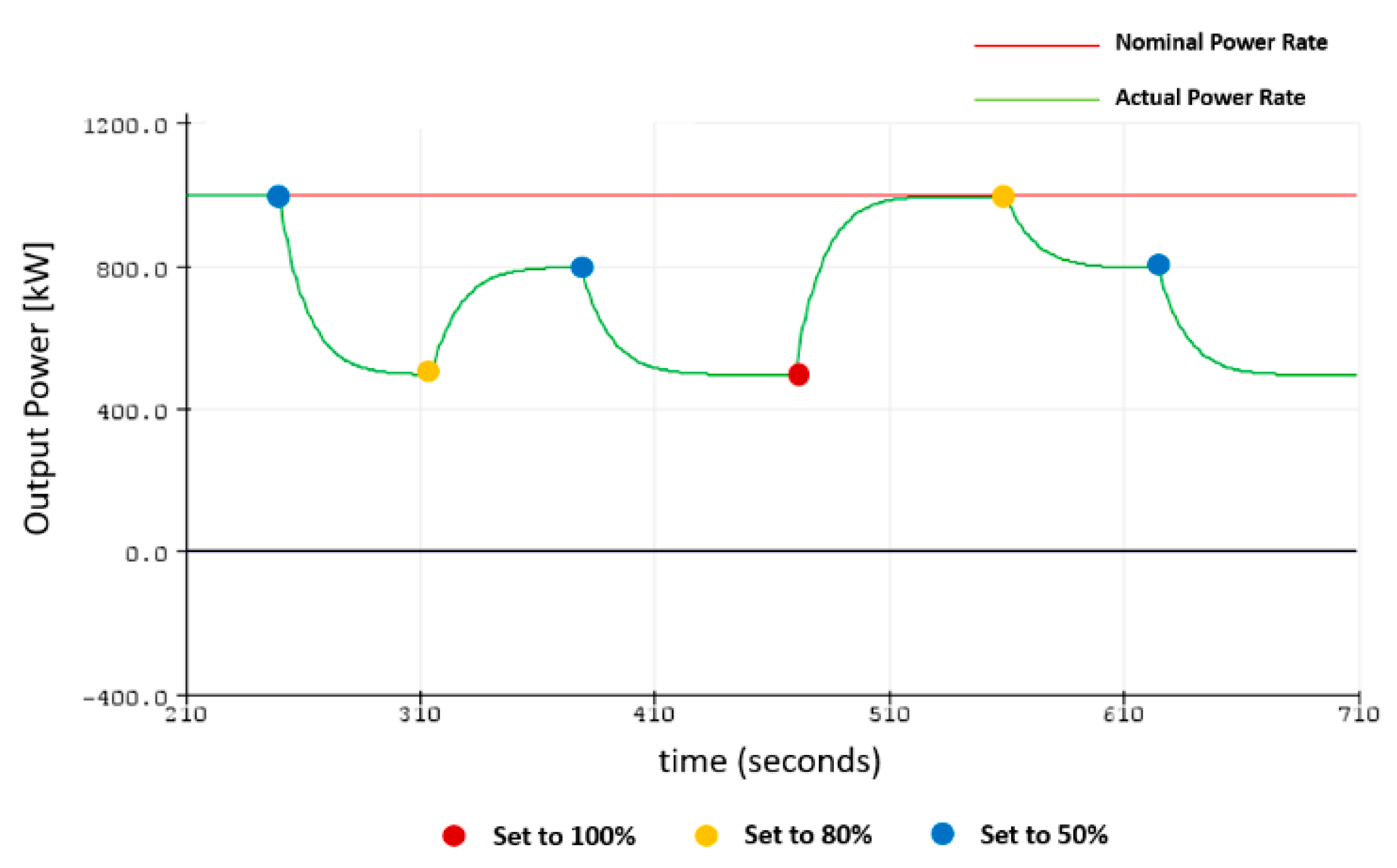
6.2. SMRiL—Output Power Control
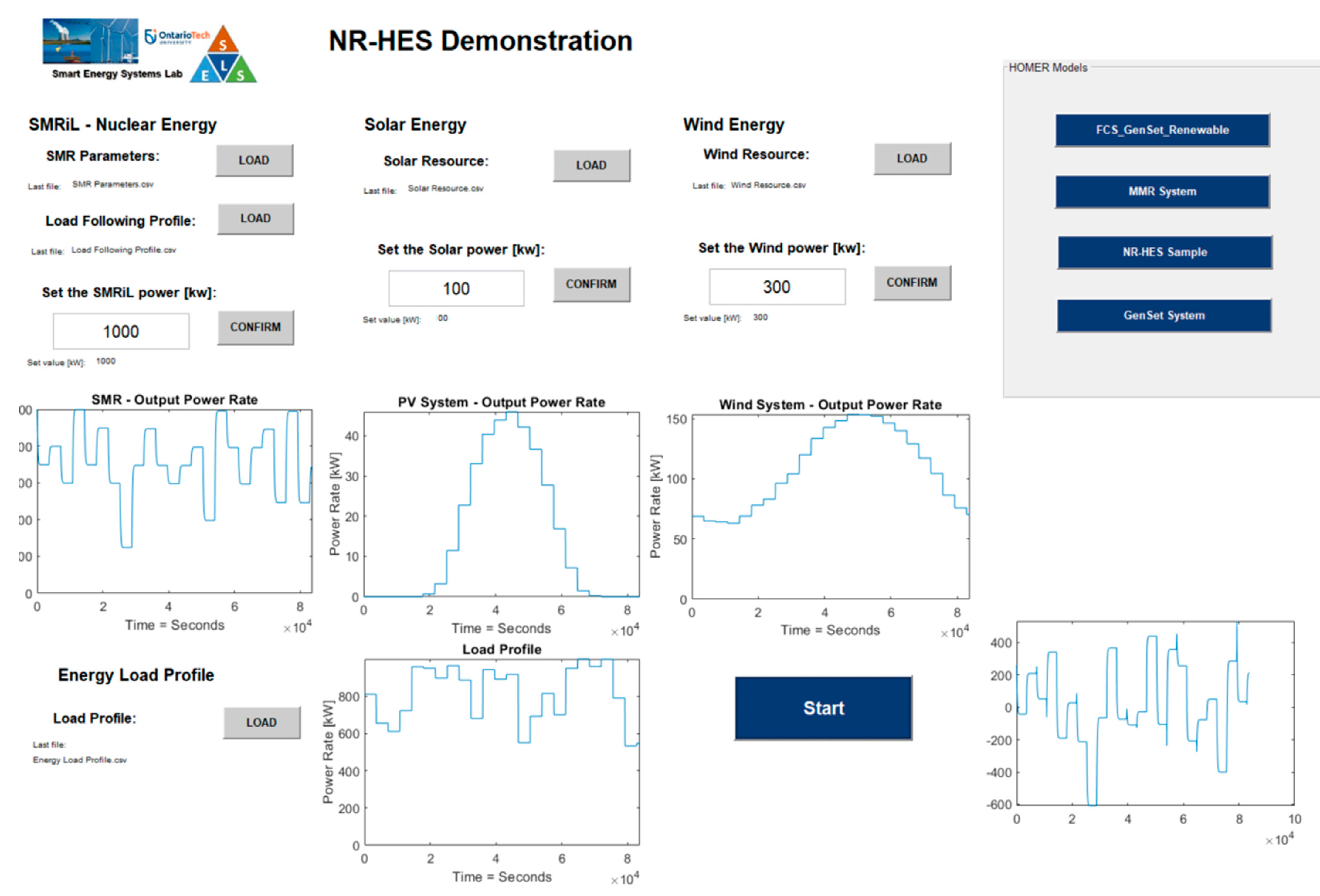
7. Hybrid Energy System Demonstration
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- IAEA. Non-Baseload Operation in Nuclear Power Plants: Load following and Frequency Control Modes of Flexible Operation; International Atomic Energy Agency: Vienna, Austria, 2018. [Google Scholar]
- Suman, S. Hybrid nuclear-renewable energy systems: A review. J. Clean. Prod. 2018, 181, 166–177. [Google Scholar] [CrossRef]
- Kan, N. The Fukushima Nuclear Power Plant Disaster and the Future of Renewable Energy; Cornell University Press: Ithaca, NY, USA, 2018. [Google Scholar]
- Elliott, D. Does Nuclear Power Have a Place in a Sustainable Energy Future? In Nuclear or Not? Palgrave Macmillan: London, UK, 2007. [Google Scholar]
- Krikorian, S. IAEA Department of Nuclear Energy. 18 September 2019. Available online: https://www.iaea.org/newscenter/news/nuclear-and-renewables-playing-complementary-roles-in-hybrid-energy-systems (accessed on 5 April 2022).
- NEA. Small Modular Reactors: Challenges and Opportunities. Nuclear Energy Agency. Available online: https://www.oecd-nea.org/jcms/pl_57979/small-modular-reactors-challenges-and-opportunities?details=true (accessed on 16 April 2022).
- Morales Pedraza, J. Small Modular Reactors for Electricity Generation: An Economic and Technologically Sound Alternative; Springer Energy: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- IAEA. Advanced Reactors Information System. International Atomic Energy Agency. Available online: https://aris.iaea.org/ (accessed on 15 March 2022).
- El-Emam, R.S.; Subki, M.H. Small modular reactors for nuclear-renewable synergies: Prospects and impediments. Energy Res. 2021, 45, 16995–17004. [Google Scholar] [CrossRef]
- IAEA. Nuclear Reactor Simulators for Education and Training. PC-Based Basic Principle Simulators. Available online: https://www.iaea.org/topics/nuclear-power-reactors/nuclear-reactor-simulators-for-education-and-training (accessed on 15 May 2022).
- Locatelli, G.; Fiordaliso, A.; Boarin, S.; Ricotti, M.E. Cogeneration: An Option to Facilitate Load Following in Small Modular Reactors. Prog. Nucl. Energy 2017, 97, 153–161. [Google Scholar] [CrossRef]
- IAEA. Instrumentation and Control Systems for Advanced Small Modular Reactors; International Atomic Energy Agency: Vienna, Austria, 2017. [Google Scholar]
- Chaplin, R.A. Nuclear Plant Operation. In The Essential CANDU; UNENE: Hamilton, ON, Canada, 2016; Chapter 9. [Google Scholar]
- Hadad, K.; Mohamadi, A.; Sabet, H.; Ayobian, N.; Khani, M. Numerical Solution of Multigroups Point Kinetic Equations. In Proceedings of the 2nd International Conference on Nuclear Science and Technology in Iran, Tehran, Iran, 27–30 April 2004. [Google Scholar]
- Rashid, N.K.A.M. Modeling nuclear processes by Simulink. In AIP Conference Proceedings; AIP Publishing LLC: Selangor, Malaysia, 2015; Volume 1659. [Google Scholar]
- Kerlin, T.W.; Upadhyaya, B.R. Dynamics and Control of Nuclear Reactors; Elsevier: Amsterdam, The Netherlands, 2019. [Google Scholar]
- Damian, W.; Grzegorz, G. Hardware in the Loop Control Based on the Open Source Simulation Environment. In Advanced, Contemporary Control; Springer: Berlin/Heidelberg, Germany, 2020; pp. 529–540. [Google Scholar]
- Quispe, M.A.; Molina, M.C.; Castillo, F.; Andaluz, V.H. Advanced Controllers for Level Processes: Hardware-in-the-Loop Technique. In Perspectives and Trends in Education and Technology; Springer: Berlin/Heidelberg, Germany, 2021; pp. 725–738. [Google Scholar]
- Naghedolfeizi, M. Dynamic Modeling of a Pressurized Water Reactor Plant for Diagnostics and Control; University of Tennessee: Knoxville, TN, USA, 1991. [Google Scholar]
- Ogata, K. Modern Control; Pearson: London, UK, 1997. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pressurized Water Reactor (PWR) |
| • Advanced PWR: Two-Loop Large PWR (Korean-OPR 1000) |
| • Russian-Type PWR (VVER-1000) |
| • Advanced Passive PWR (AP-600) |
| • Integral Pressurized Water Reactor (SMR) |
| Boiling Water Reactor (BWR) |
| • Conventional Boiling Water Reactor with Active Safety Systems (BWR) |
| • Advanced BWR with Passive Safety Systems (ESBWR) |
| Pressurized Heavy Water Reactor (PHWR) |
| • Conventional Pressurized Heavy Water Reactor (PHWR) |
| • Advanced PHWR (ACR-700) |
| Under Development |
| • High-Temperature Gas-Cooled Reactor (HTGR) |
| • Sodium-Cooled Fast Reactor (SFR) |
| Core Thermal and Hydraulic Characteristics | ||
| Total primary heat output | 2200 | MWth |
| Nominal primary system pressure | 2250 | psi |
| Total coolant flow rate | 1.02 × 108 | lb/h |
| Average coolant velocity along the fuel rods | 14.3 | ft/sec |
| Total mass of the coolant in the primary loop | 40,6050 | lb |
| Nominal coolant inlet temperature | 546.2 | °F |
| Nominal coolant outlet temperature | 602.1 | °F |
| Active heat transfer surface area | 42,460 | ft2 |
| Average heat flux | 171,600 | BTU/h. ft2 |
| Fuel tcoolant heat transfer coefficient | 176 | BTU/h. ft2. °F |
| Kinetic Characteristics | ||
| Doppler coefficient | −1.30 × 10−5 | (Delta k/k)/°F |
| Moderator temperature coefficient | −2.00 × 10−4 | (Delta k/k)/°F |
| Moderator pressure coefficient | 3.00 × 10−6 | (Delta k/k)/psi |
| Prompt neutron lifetime | 1.60 × 10−5 | sec |
| Delayed neutron fraction | 6.40 × 10−2 | |
| Steam Generator Data | ||
| Number of U-tubes | 3.26 × 103 | |
| U-tube diameters | 8.75 × 10−1 | in |
| Average tube wall thickness | 5.00 × 10−2 | |
| Mass of U-tube metal | 9.18 × 104 | lb |
| Total heat transfer area | 4.44 × 104 | ft2 |
| Steam Conditions at Full Load | ||
| Steam flow | 3.17 × 106 | lb/h |
| Steam temperature | 5.16 × 102 | °F |
| Steam pressure | 7.70 × 102 | psig |
| Primary Side Coolant | ||
| Reactor coolant flow | 3.39 × 107 | lb/h |
| Reactor coolant water volume | 9.28 × 102 | ft3 |
| Second Side Fluid | ||
| Feedwater temperature | 4.35 × 102 | °F |
| Secondary side water volume, full power | 1.53 × 103 | ft3 |
| Secondary side steam volume, full power | 3.20 × 103 | ft3 |
| Group | U-235 (Thermal Fission) | ||
|---|---|---|---|
| Mean Life (s) | Decay Constant ( ) | Fraction | |
| 1 | 80.4 | 0.0124 | 0.00021 |
| 2 | 32.8 | 0.0305 | 0.00140 |
| 3 | 8.98 | 0.111 | 0.00125 |
| 4 | 3.32 | 0.301 | 0.00253 |
| 5 | 0.88 | 1.14 | 0.00074 |
| 6 | 0.332 | 3.01 | 0.00027 |
| Energy Management—INPUT | |
|---|---|
| Time | Rate |
| 00:00 | 20% |
| 02:00 | 15% |
| 03:00 | 20% |
| 05:00 | 25% |
| 06:00 | 40% |
| 07:00 | 55% |
| 08:00 | 60% |
| 16:00 | 70% |
| 17:00 | 75% |
| 18:00 | 90% |
| 22:00 | 70% |
| 23:00 | 40% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gabbar, H.A.; Esteves, O.L.A. Real-Time Simulation of a Small Modular Reactor in-the-Loop within Nuclear-Renewable Hybrid Energy Systems. Energies 2022, 15, 6588. https://doi.org/10.3390/en15186588
Gabbar HA, Esteves OLA. Real-Time Simulation of a Small Modular Reactor in-the-Loop within Nuclear-Renewable Hybrid Energy Systems. Energies. 2022; 15(18):6588. https://doi.org/10.3390/en15186588
Chicago/Turabian StyleGabbar, Hossam A., and Otavio Lopes Alves Esteves. 2022. "Real-Time Simulation of a Small Modular Reactor in-the-Loop within Nuclear-Renewable Hybrid Energy Systems" Energies 15, no. 18: 6588. https://doi.org/10.3390/en15186588
APA StyleGabbar, H. A., & Esteves, O. L. A. (2022). Real-Time Simulation of a Small Modular Reactor in-the-Loop within Nuclear-Renewable Hybrid Energy Systems. Energies, 15(18), 6588. https://doi.org/10.3390/en15186588