1. Introduction
Autonomous vehicles and the IoT elements that support their movement will constitute integral parts of Smart Cities in the near future. According to estimates based on historical automotive trends in [
1], half of the world’s vehicle fleet may be autonomous by 2050. Dedicated systems should be implemented as vehicles evolve to improve safety, traffic flow capacity, and communication. It is possible to divide the IoT devices considered in this paper into four groups, depending on the communication participants. The first group, called V2I, contains communication between the vehicle and the road infrastructure. The other groups are V2V (vehicle to vehicle), I2I (infrastructure to infrastructure), and V2X (vehicle to everything).
Autonomous vehicles may differ in the advancement of control systems and in their scope of motion control. The Society of Automobile Engineers (SAE) divided them into five different degrees of automation and a zero level, a “classic” vehicle that is not automated by any means. The fifth level presents a fully autonomous vehicle, where the driver does not handle any aspect related to the car’s motion control. The equivalents of these levels are also determined by the German BASt (Bundesanstalt für Straßenwesen—Federal Road Office) and the American NHTSA (National Highway Traffic Safety Administration) [
2].
Level 2 vehicles are available for purchase by private individuals, and Levels 3 and 4 are currently being developed [
3]. Fully autonomous vehicles do not exist yet in road traffic. They exist only in closed areas, such as airports [
4]. However, partially automated vehicles are already on the move on public roads, and more automated versions are being tested. In this paper, autonomous vehicles are understood either as highly automated or fully automated vehicles. The term automated vehicles refers to vehicles with a lower degree of automation. A serious problem occurs in both low- and high-automation vehicles: the way to communicate between vehicles and identify the existing road infrastructure.
The purpose of this paper is to propose a conception of future parameters for road infrastructure and traffic control to adapt to autonomous vehicle traffic. Classic solutions to problems need to be reformulated. Therefore, the V2I methods are discussed in
Section 2 in the context of a literature review. Four specific cases are formulated, and each case is discussed in a separate section. The first situation in
Section 3 proposes to solve the problem of detecting moving hazards along highways. The second case in
Section 4 considers the problem of communication at intersections, with the proposal of a solution to pedestrian traffic in the case of complete traffic automation. The third case concerns the communication of motor and rail vehicles at railroad crossings in agglomerations. Case 4 in
Section 6 indicates that it is possible to use IoT devices related to autonomous vehicles in traffic modeling. Each concept has “key elements” that characterize the way the system works.
Section 7 characterizes in technical detail how each system is supposed to work. The concluding remarks are provided in
Section 8. The paper in its conceptual form does not contain a research component. Further research will include conducting simulations.
2. Description of Communication Tools between Autonomous Vehicles and Infrastructure (Literature Review)
Currently, automated vehicles use edge detection to detect road signs. Edge detection is a mathematical method. These methods identify the points where the brightness of a black-and-white image changes rapidly, representing them as pixels. As a result of using these methods, an image is created from only “edges”. It has a reduced amount of information while maintaining structure. In this way, characters with a characteristic shape can be detected with additional efficiency. An edge detection algorithm capable of detecting a STOP sign, even in the event of ice or snow cover on the sign, is presented in [
5]. In addition to optical detection, autonomous vehicles also use LIDAR, ultrasonic sensors, and radars of various ranges [
6]. Recent cost-efficient solutions contain a deep learning approach [
7,
8,
9]. Deep learning systems based on the You Only Look Once (YOLO) model have been dedicated strictly to sign detection [
10,
11,
12,
13]. The deep learning approach is also used in detecting signs under low light conditions [
14]. Construction site signs can be detected more efficiently by a different method described in [
15]. In the case of black ice, road conditions can be detected by Convolutional Neural Networks [
16]. However, systems based on vehicle detection itself are controversial. Despite continuous improvement, extreme situations may occur in which the system may cause errors. Therefore, other systems are needed to support autonomous vehicle driving.
Electronic databases containing information about the road and its conditions are proposed in [
17]. Five automotive cloud platforms are listed in [
18] that show the tendency for cars to be treated as IoT entities. Systems based on an electronic database can provide real-time data obtained by the vehicle for analysis. The data come from, for example, optical cameras or an Electronic Stability Program (ESP). The data can be used to classify the weather conditions on the road. The information is sent to the cloud along with other meteorological data [
19]. Then, the information interpreted by the algorithm sends feedback to the vehicles in the specified section of the road [
20]. In [
21,
22], simulations proved the effectiveness of V2I communication warnings of fog and support for driving in fog. In [
23], the safety enhancement of OBU (On-Board Unit)-equipped vehicles on the Wyoming Interstate 80 Testbed was proven.
The problem with cloud-based systems may be their mutual incompatibility. Radio wave communication is an alternative proposal. An example is Bluetooth [
24]. The first advantage of using Bluetooth is its security. It is nearly impossible to block by DDoS attacks (distributed denial of service—an attack directed from a large number of computers aimed at seizing service resources). Bluetooth is communication between specific objects over relatively short distances. Devices are combined in a piconet. As devices come closer together, pico networks are created dynamically and automatically. These are ad hoc networks; that is, they are decentralized, and connections do not require any traditional network infrastructure. The highest power class of the device (the first one) offers a range of about 100 m. It is sufficient when the vehicle communicates with the street infrastructure, such as traffic lights.
Other types of communication technology under consideration are Wi-Fi and WLAN. Both operate in the IEEE 802.11 standard. The standards of families are numerous; however, this paper focuses on 802.11p WAVE. WAVE is adapted to DSRC (Dedicated Short-Range Communications). According to [
25], DSRC is one of the two technologies with the lowest delays—that is, the most suitable for V2X communication (vehicle to everything, or vehicle communication with elements that may affect it). DSRC is a 75 MHz and 5.9 GHz radio wave reserved for automated vehicle communications in the United States. In the European Union, it is the 30 MHz spectrum, and the 5.9 GHz band remains unchanged. A similar frequency of the spectrum allows for compatibility. Due to the unique frequency, the waves are not disturbed by other forms of wireless communication common in cities [
24]. DSRC-based systems are already being tested in road traffic. A sample research area covers the entire city of Ann Arbor in the United States as the Ann Arbor Connected Vehicle Test Environment (AACVTE) [
26].
When transmitting direct radio signals, it is possible to use the existing cellular network (5G technology). The 5G technology has the ability to compete with DSRC for smooth data transmission and has the advantage of partially using the existing infrastructure. In [
27], the expected higher effectiveness of 5G technology in V2I and V2V communication is proved; nevertheless, the LTE network also fulfills its role in vehicle communication.
The V2X systems can also be used by cars with zero automation, enabling their cooperation with autonomous cars. In the AACVTE program [
26], non-invasive hardware is installed in vehicles in the form of a box with antennas. The boxes send information to other vehicles and are based on GPS.
An alternative to communicating with infrastructure in cities can be Li-Fi, as proposed in [
28]. This is the transmission of a signal using visible light. The authors of [
28] proposed to transmit the light signal using a traffic light to the first vehicles in the queue and then forward the signal using the vehicle lighting system. This solution is immune to interference on overcrowded frequencies in which Bluetooth and Wi-Fi operate. Cooperative driving at blind crossings has been proposed in [
29,
30]. This would enable the elimination of traffic lights for vehicles, but requires full automation and interconnection of all vehicles. In [
31], a distinction was made between solving this situation in centralized environments based on a vehicle traffic management system and decentralized environments where vehicles will solve the problem of passing at intersections or merging by themselves. Other research on centralized networks was conducted in [
32]. In [
33], a system based on a public fleet of autonomous vehicles without private vehicles in the network was proposed.
Connecting autonomous vehicles with traffic lights can increase intersection safety and capacity. Such solutions have already been tested, for example, in Japan, since the end of 2015 [
34]. ITS Connect uses the 760 MHz radio frequency reserved for the Intelligent Transportation System (ITS) in Japan. The system was started with its introduction to three car models sold in Japan. The 2018 media coverage provides information on more than 100,000 vehicles connected to this technology. The introduction of ITS Connect is linked to the desire to reduce the number of accidents at intersections that, according to 2014 Japanese police data, represent 40% of road accidents in the country [
35]. The system has export issues; the use of the 760 MHz frequency is banned in New Zealand [
36] due to collision with the cell phone network.
3. The Concept for Case 1: Obstructions on the Road Caused by Maintenance Works or Other Factors
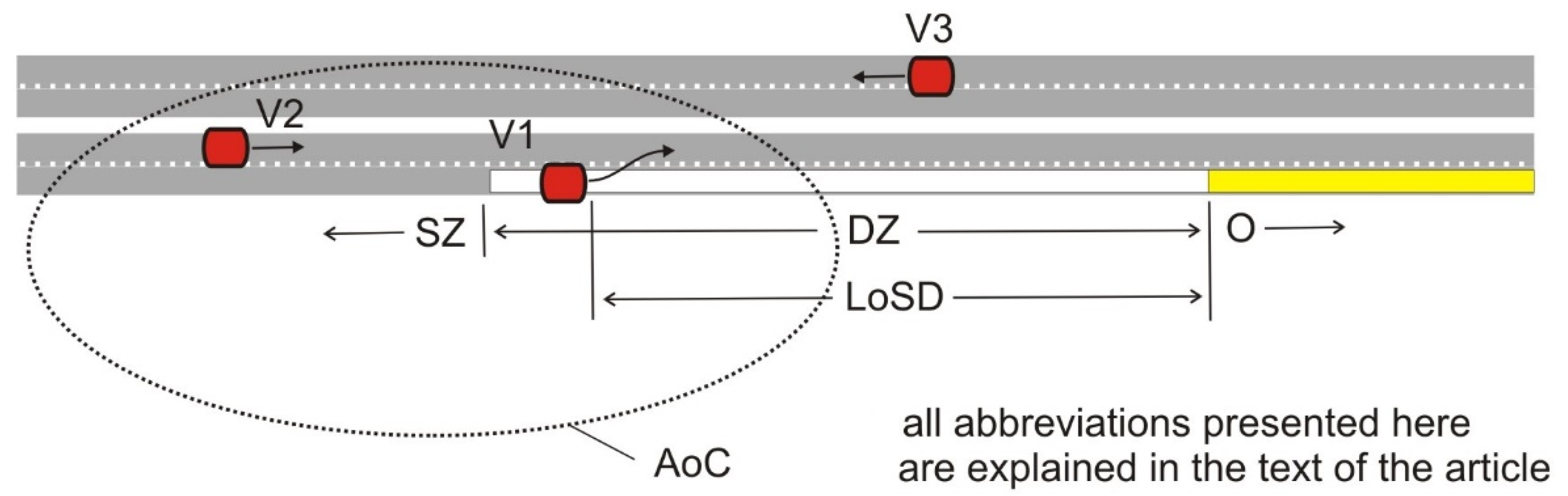
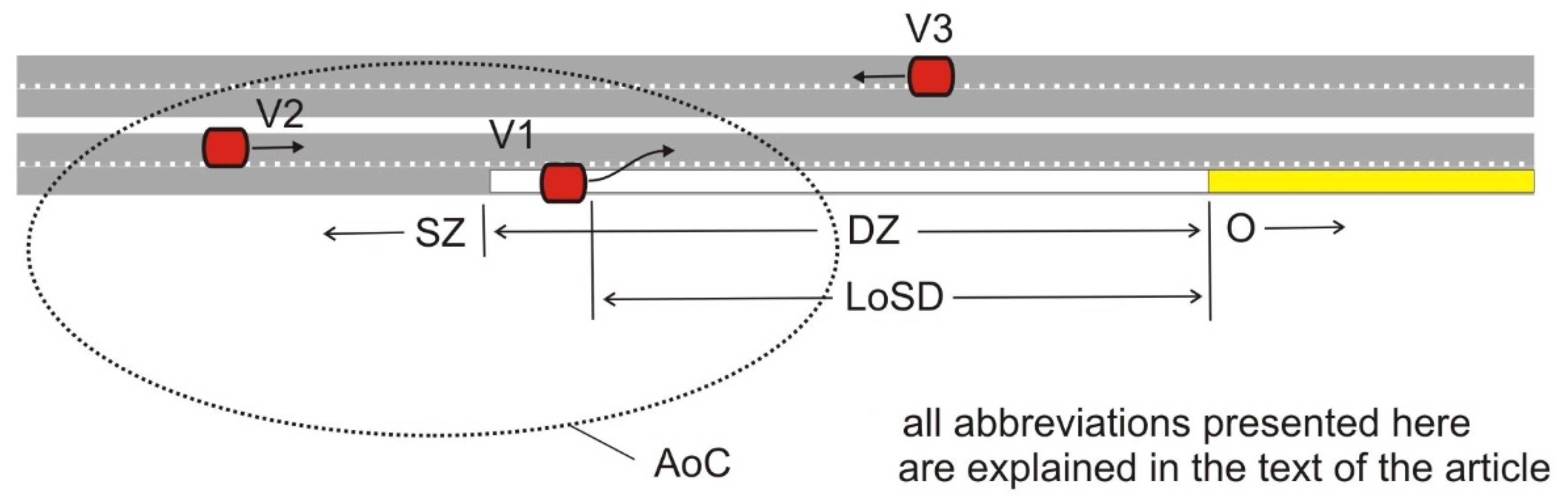
Case 1 applies to highways or major multilane urban arterials. The class of roads is high, with a large number of vehicles traveling at high speeds. In this case, it is assumed that some of the vehicles do not need to be fully autonomous—they may have OBUs transmitting only unilateral messages to the driver.
Key elements:
O—Obstacle;
V1—Vehicles heading towards the obstacle;
V2—Vehicles heading in the direction of the obstacle, but in a nonblocked lane;
V3—Vehicles on the other roadway;
SD—Safe distance;
SZ—Safe zone;
DZ—Danger zone;
LoSD—Line-of-sight distance; and
AoC—Area of communication.
The problem of road obstructions in the context of autonomous vehicles has already been outlined. Commercial cloud-based solutions are based on vehicles reporting hazards to the cloud and informing incoming vehicles. However, this solution has a drawback. In the event of a threat, only the first few vehicles provide data for analysis by cloud infrastructure algorithms. Hazards that are constantly moving along the road represent even bigger problems.
We propose to equip workers, or signs for road works, with transmitters. Hazard information would be passed without the need to identify the danger, whether it is moving along the road or not. This would be even more valuable in the event of an obstruction moving along the road, such as maintenance work or road structure testing. Such difficulties would have to be constantly analyzed by algorithms, which in the case of constant movement would never be precise. The maintenance workers would always be farther away than where the first vehicle detected them. Traffic flow could be positively influenced by an earlier change in lanes by an automated vehicle. The situation is shown in
Figure 1. DZ is the distance within which it is too late to change the lane fluently or safely. In scenarios of bad visibility (fog or curve), DZ can be longer than the LoSD of the driver or detectors.
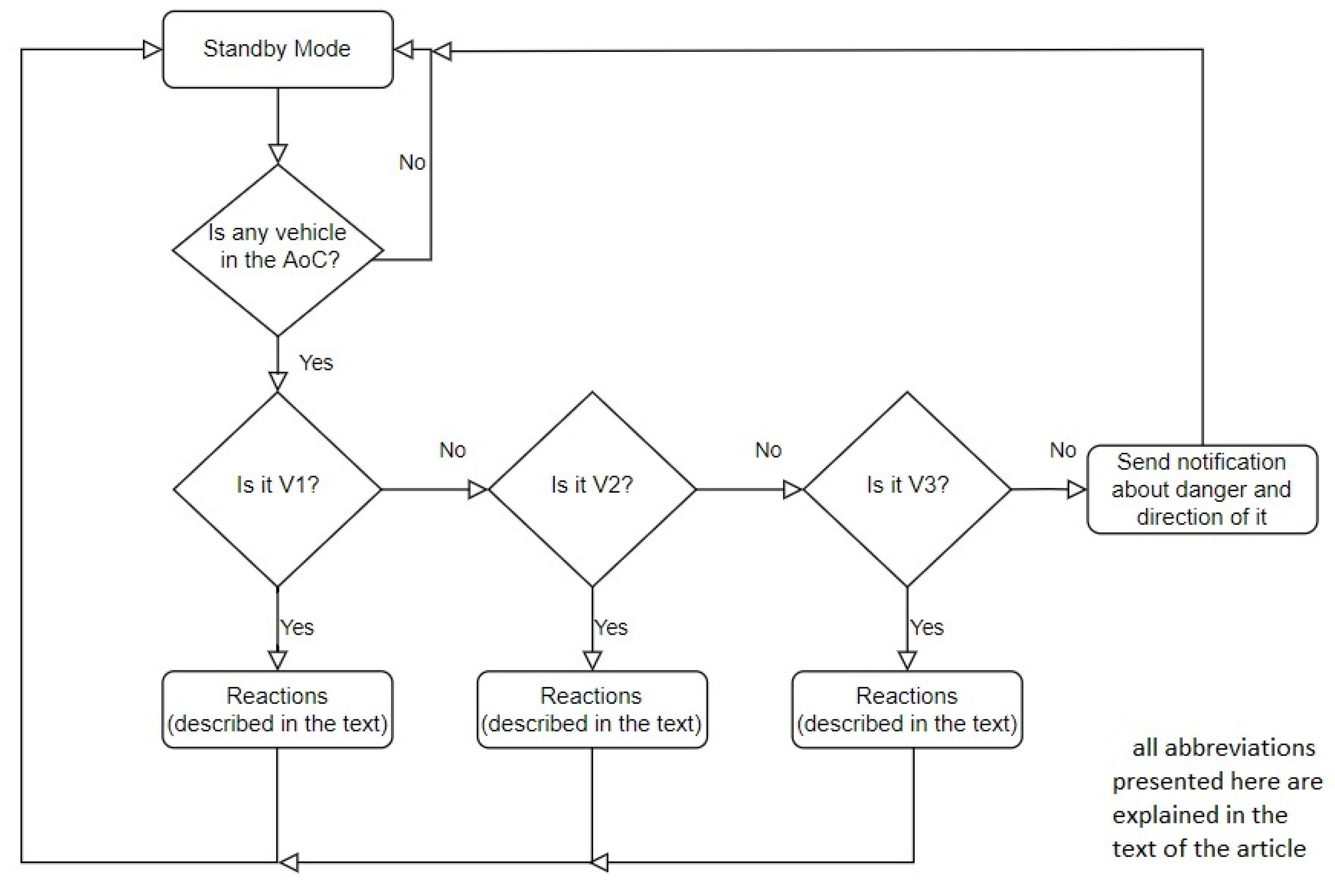
The system must warn vehicles approaching a hazard. Simply sending a signal to all vehicles could cause unnecessary lane changes on the opposing roadway, reducing the capacity. Communication must be two-way. Information on vehicle direction is needed. In case such information is not obtained, the message will be refined by the direction the hazard will occur in.
Figure 2 shows the decision process. V1 is the group of vehicles in the lane with an obstacle. The reaction is to inform them to change lanes safely. V2 are vehicles on the same road; the desired reaction is to smoothly let the vehicles from group V1 into the lane to avoid an obstacle. The V3 group is vehicles in a second lane whose driving cannot be interrupted by the obstacle or the system. The vehicle groups are shown in
Figure 1.
4. The Concept for Case 2: Communication of Vehicles with Traffic Signals and Other Users
Case 2 can be applied to intersections with traffic lights in cities. Intersections are IoT-enabled and communicate via V2I with vehicles. The possible technologies for sending data are described in
Section 7. This section describes both less and more advanced possibilities for communicating with traffic lights. Less advanced refers to sending notifications to vehicles that are not necessarily autonomous. For more advanced capabilities, a 100% autonomous vehicle share in traffic is required.
Key elements:
AoC—Area of communication;
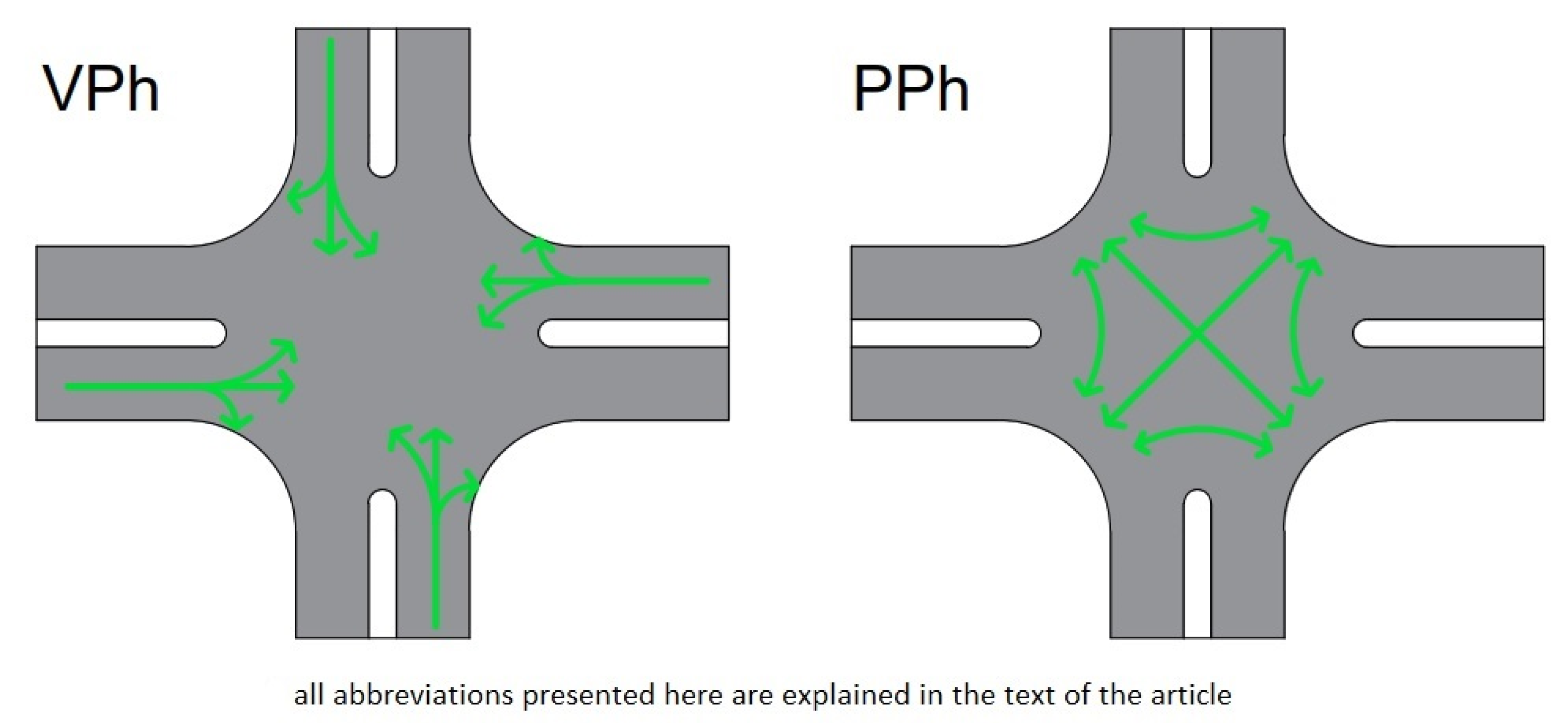
VPh—Vehicle phase;
PPh—Pedestrian and personal transporter phase;
PV—Prioritized vehicles;
V—Other vehicles;
PT—Personal transporter; and
P2I—Pedestrian to infrastructure communication.
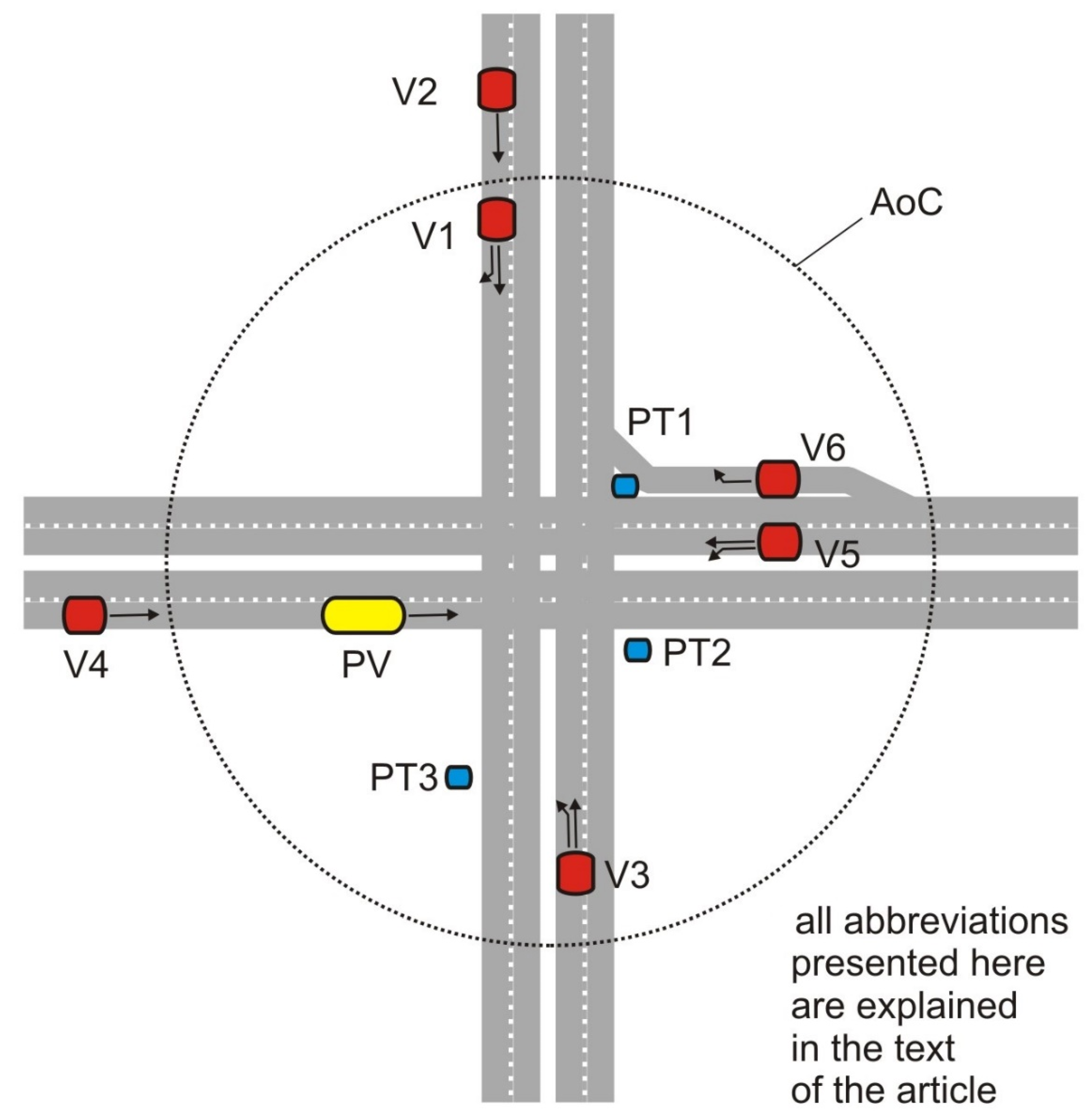
Safety at intersections can be improved by warning drivers of possible collisions (with pedestrians or vehicles) and red lights. V2I systems can detect approaching vehicles and inform about a collision course, or the vehicles themselves with a V2V (vehicle to vehicle) connection will do so. A less advanced form is the notification of the danger directly to an automated vehicle or to the driver of an automated vehicle through audio or video messages. Another dangerous situation that can be prevented by the message is the running of red lights.
The communication of vehicles with traffic lights can also affect road capacity, as well as the economy of driving and the associated fuel economy. An autonomous vehicle with an assured connection to the intersection will gain several benefits. Examples include not having to limit the speed when no traffic lights are visible, adjusting the speed to the anticipated signal, and preparing to drive before seeing the signal. It will also allow the driver to perform non-driving activities while waiting for the green signal. When each vehicle is equipped with V2I systems, it will be possible to eliminate the physical infrastructure of traffic control. Hypothetically, in the future, autonomous vehicles equipped with V2X systems will not need any established traffic organization. Potential collisions will be resolved at the level of information transfer between vehicles, as shown in
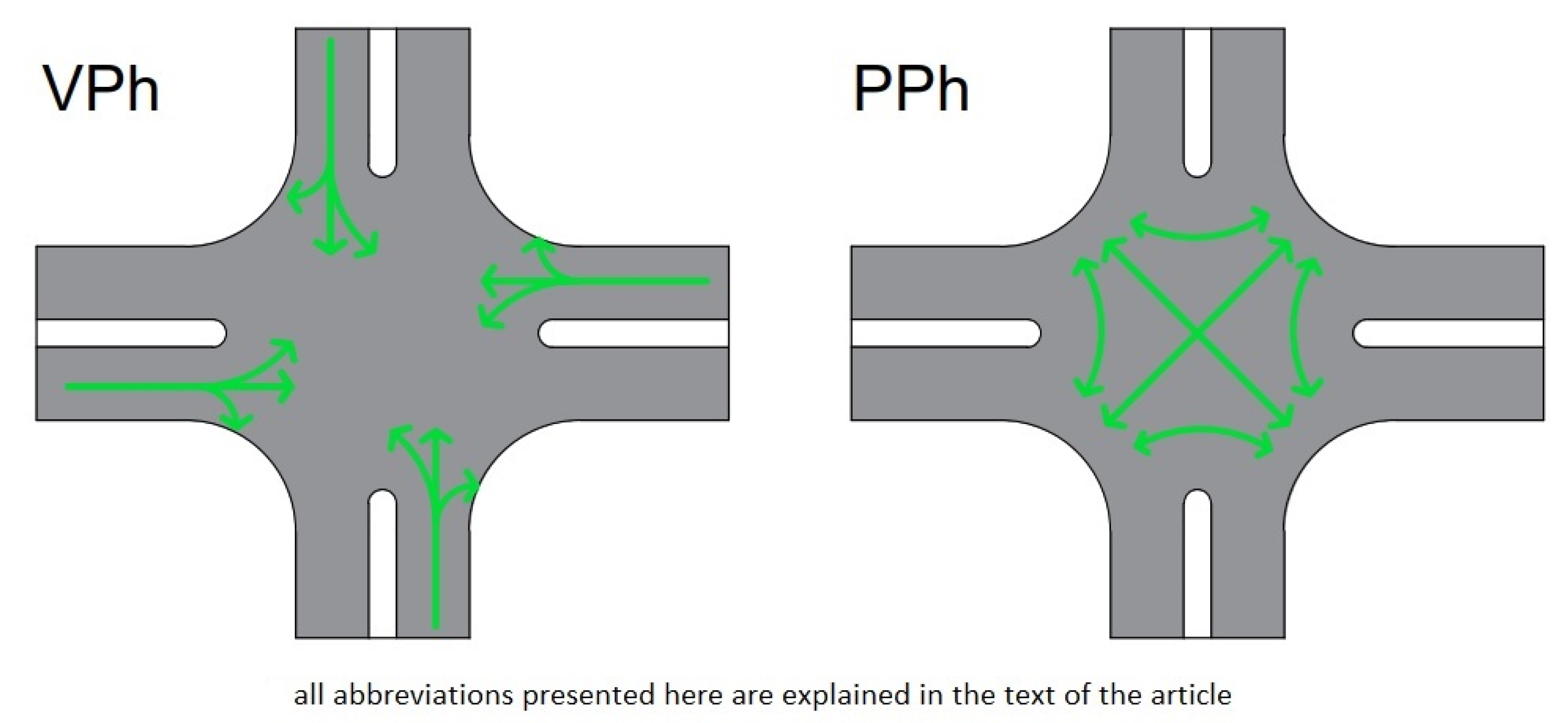
Figure 3. Nevertheless, the safe conduct of pedestrian and PT traffic should not be forgotten. If we assume that the movement of autonomous cars will be able to proceed safely without traffic lights, we propose designating two-phase signaling: for cars only and for pedestrians only. The two-phase signaling is shown in
Figure 4. The first vehicular (VPh) interleaving fully automated vehicles are shown on the left side of
Figure 4. The second pedestrian (PPh) allows all possible pedestrian relationships, including a pedestrian scramble in the middle of the intersection, as shown on the right side of
Figure 4. This solution would allow pedestrian crossings to be led through the middle of the intersection, as shown. Then, it is possible to increase the capacity of both car and pedestrian traffic simultaneously. Facilitating pedestrian traffic on a different level (by means of a footbridge or underground passage) is incompatible with the current direction of urban planning, e.g., due to the significant difficulty for people with limited mobility.
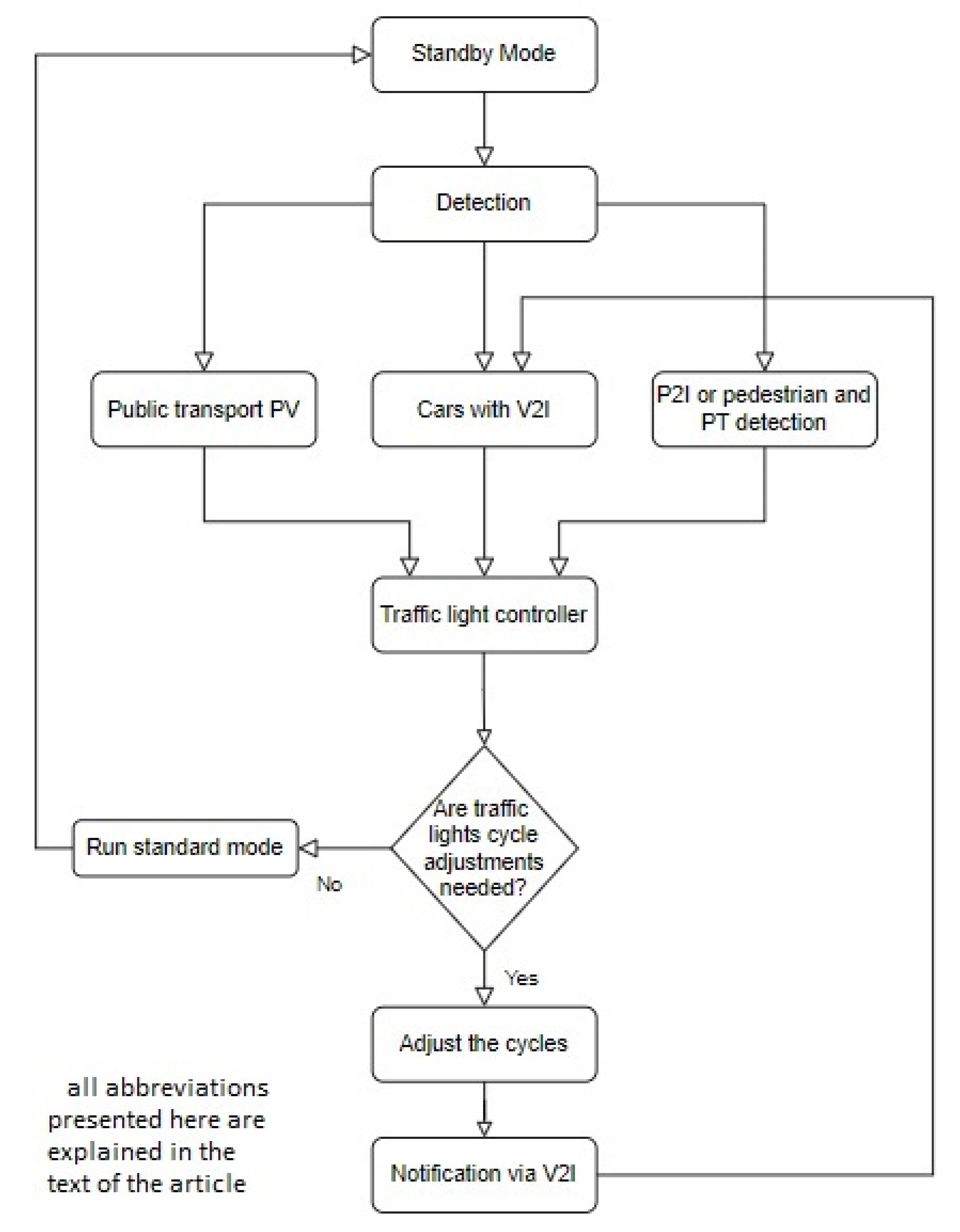
Traffic lights can be timed—they can have an unchangeable, fixed phase length. The length is determined by traffic measurements prior to the construction of the signal system. The second most popular type is an accommodative signal, which extends the green signal if it detects vehicles approaching the signal. The most advanced traffic lights belong to the Intelligent Transportation System (ITS), which unloads traffic on a city-wide scale. ITS does this by detecting vehicles in different parts of the city and adjusting the length of the signals to reduce congestion. The classic ways of detecting vehicles with ITS are by loop detection, photoelectric sensors, radar sensors, and video detection [
37]. We propose that IoT devices can provide traffic volume information to ITS. A less advanced form will be to transmit the position of vehicles. This will give a result similar to the detection currently used in ITS. However, an autonomous vehicle that has a predefined route can inform the system not only about its location, but also about the entire planned route. The use of this type of data will allow us to manage traffic throughout the city, and ITS algorithms will be able to reduce congestion more effectively. Such management can be executed on a micro scale, when the system adjusts the cycle times according to vehicle flows nearby, or on the macro scale of managing the whole city by ITS.
The detection of pedestrians and PTs can be a problem. Unlike vehicles, not all pedestrians will be able to communicate with the infrastructure. In the future, some of them may have P2I applications on smartphones. PT users can rent vehicles via an app or use privately owned vehicles. The communication of rental applications with traffic controls can solve the problem of detecting rented PTs. The remaining pedestrians and PT users approaching the intersection should be detected using “classic” methods, such as video detection. When a large number of pedestrians or PT users accumulate at the intersection, the controller will turn on PPh. To ensure pedestrian traffic is not disruptive, PPh will be turned on every specified amount of time. The suggested time is a maximum of 2 min.
Figure 5 shows how information travels between vehicles and traffic controls. First, the system detects vehicles from groups with different priorities. The groups are public transport vehicles, motor vehicles, and pedestrians/PTs. Groups based on priority level are considered separately. Public transport will have the biggest priority. The controller will then divide the signaling cycle based on the detected number of passenger cars and pedestrians/PTs. Suppose the standard signaling cycle differs from that calculated by the controller based on the detected number of the groups, as mentioned above. In that case, the controller adjusts the cycles and informs about the changes by V2I.
5. The Concept for Case 3: Vicinity of the Railroad Crossing
Case 3 concerns the vicinity of a road crossing to a railway line (on one level). The class of road, railway line, and the number of vehicles are quite low. The trains are of the “railcar” type. Multi-car trains, long multi-train units, or freight trains do not occur in this case.
This case assumes that this area will be used by vehicles with an increasing level of autonomy. This applies to trains as well as road vehicles. Traditional passage closure with barriers and control points will be developed with an area system of communication between vehicles. The aim is to minimize road closures and optimize vehicle speed to reduce stoppages and time losses. The reduction in the priority level of the rail vehicle can be taken into account, assuming the possibility of reducing the speed when reaching the intersection or even stopping the train. This is not a recommended situation, but it may be allowed under specific conditions (e.g., trains passing frequently in opposite directions). This solution resembles the classic traffic control at road intersections in the context of trams. In the situation presented, the issue of the location of the train stop in the vicinity of the intersection is also taken into account. The location behind the intersection is preferred (in relation to the direction of travel), but other locations (and their impact on communication and system operation) are also allowed.
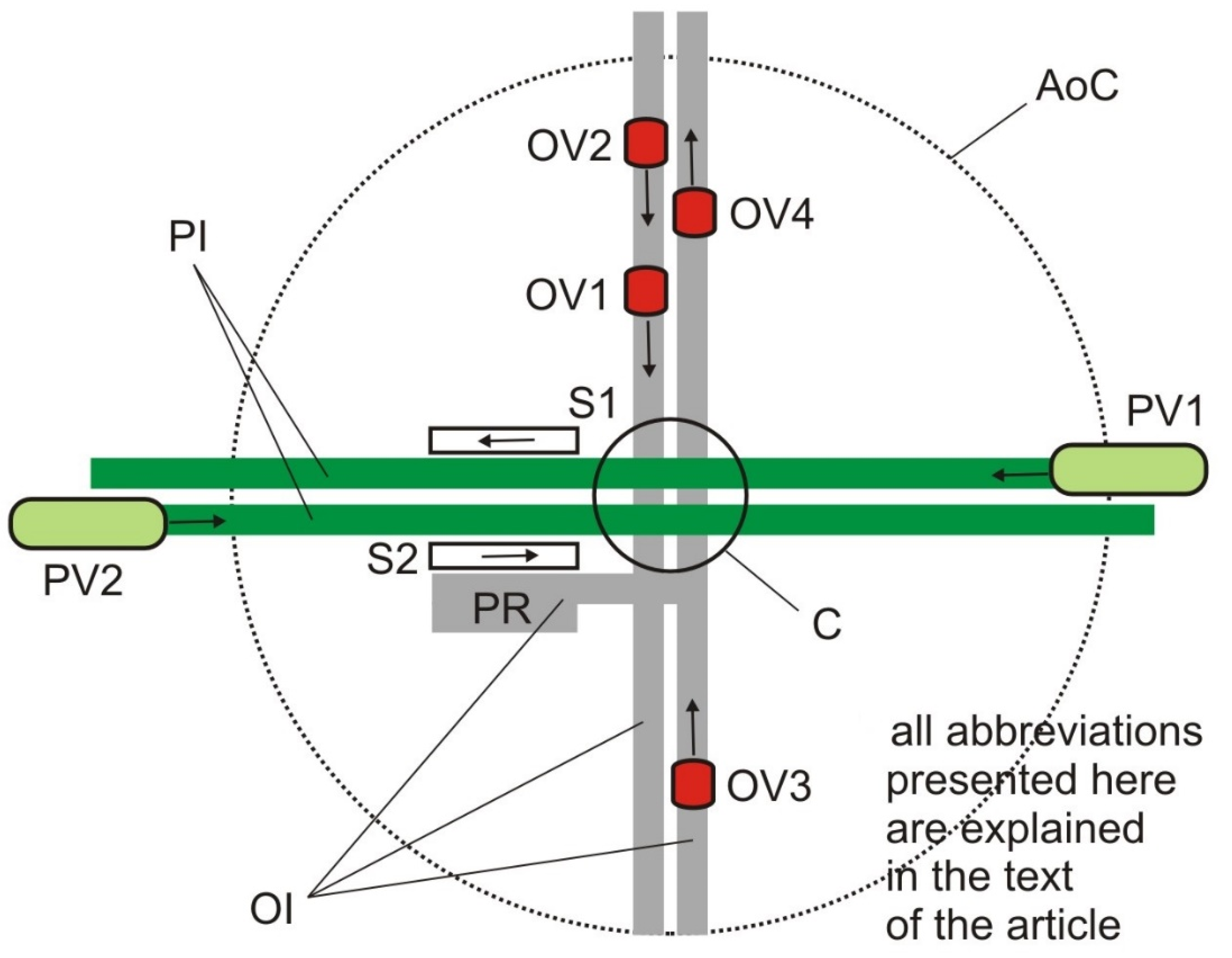
Figure 6 shows the considered case. It is a double-track railway line that crosses at one level with a two-way and two-lane road. The locations of railway stops are on one side of the crossing, so one stop is behind, and the other is in front. For case 3, the following key elements are defined:
AoC—Area of communication;
PI—Prioritized infrastructure: infrastructure (roads or ways) on which the prioritized vehicles drive (exclusive or together with other vehicles);
OI—Other infrastructure: infrastructure (roads or ways) on which no prioritized vehicles drive;
C—Crossing (critical point);
S—Stop;
PR—Parking (park and ride);
PV—Prioritized vehicle; and
OV—Other vehicle.
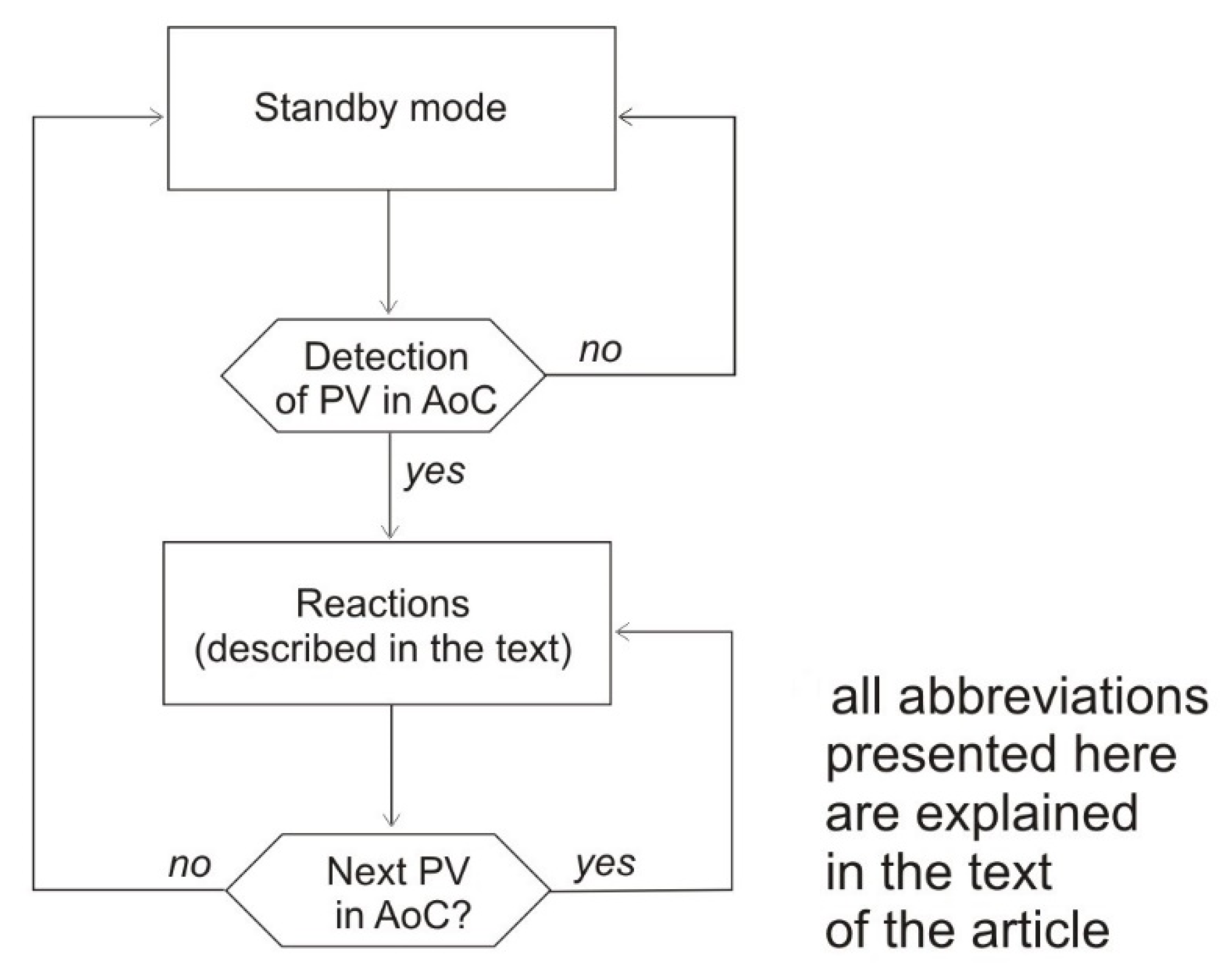
The way the system works (algorithm) is shown in
Figure 7. It includes steps and procedures, the subject and application of which may vary depending on the level of vehicle autonomy.
The basic reaction procedures for case 3 are as follows:
Initiation of system reaction (OV vehicle identification, situation assessment, including conflict registration);
Actions (information or instructions for vehicles, closing gates); and
System operation report (including vehicle reactions).
After the cycle of reactions concerning the reporting of PV vehicles, if reports of any additional PVs occur, it is necessary to assess the situation based on the work report and initiate further procedures. If not, the system returns to standby mode.
6. The Concept for Case 4: Collecting Data for Traffic Modeling
The concept applies to urban streets in Smart Cities and highways equipped with IoT devices to assist traffic. These are assumed to be highways or streets in cities with developed ITS elements.
A high proportion of OBU-equipped vehicles in traffic is assumed. The percentage of such equipped vehicles is statistically significant. A high density of V2I devices located on roads is assumed, with higher density in cities (e.g., every intersection with traffic lights and pedestrian crossings) and lower density outside cities (e.g., roadside units along freeways).
The concept of case 4 can be shown in the previous cases. Starting accordingly in case 1 or case 3 in every AoC, it is possible to collect data about the vehicles that passed through the AoC, as well as ID numbers.
The most useful concept for obtaining traffic information is case 2. In case 2, vehicles connect with intersections. Based on technology, vehicles can be tracked spatially and temporarily. The differences in tracking among different technologies are discussed in
Section 7. Every connection between the vehicle and the traffic lights can be registered. Depending on the type of technology, vehicles can have a unique ID number. According to [
38], the best method of providing safety in a connected vehicle environment is blockchain. The construction of blockchains requires vehicles to have IDs. The blockchain also requires data storage to function.
In the four-stage model, when we know the source and destination of the trip, it is important to determine the route. The shortest route is most often used for this purpose, for example, using the Dijkstra algorithm [
39]. This may not always coincide with reality. Connecting to devices or IoT systems can give a more accurate route. The consecutive travel points, being intersections, constitute enough data to reconstruct the daily routes of travelers. If an autonomous vehicle transmits the entire route and time to a traffic management system, the data will accurately fit a traffic model. The same may be the case if the vehicle keeps transmitting its GPS location, but in this case, it is also possible to create accurate O-D matrices of the trip.
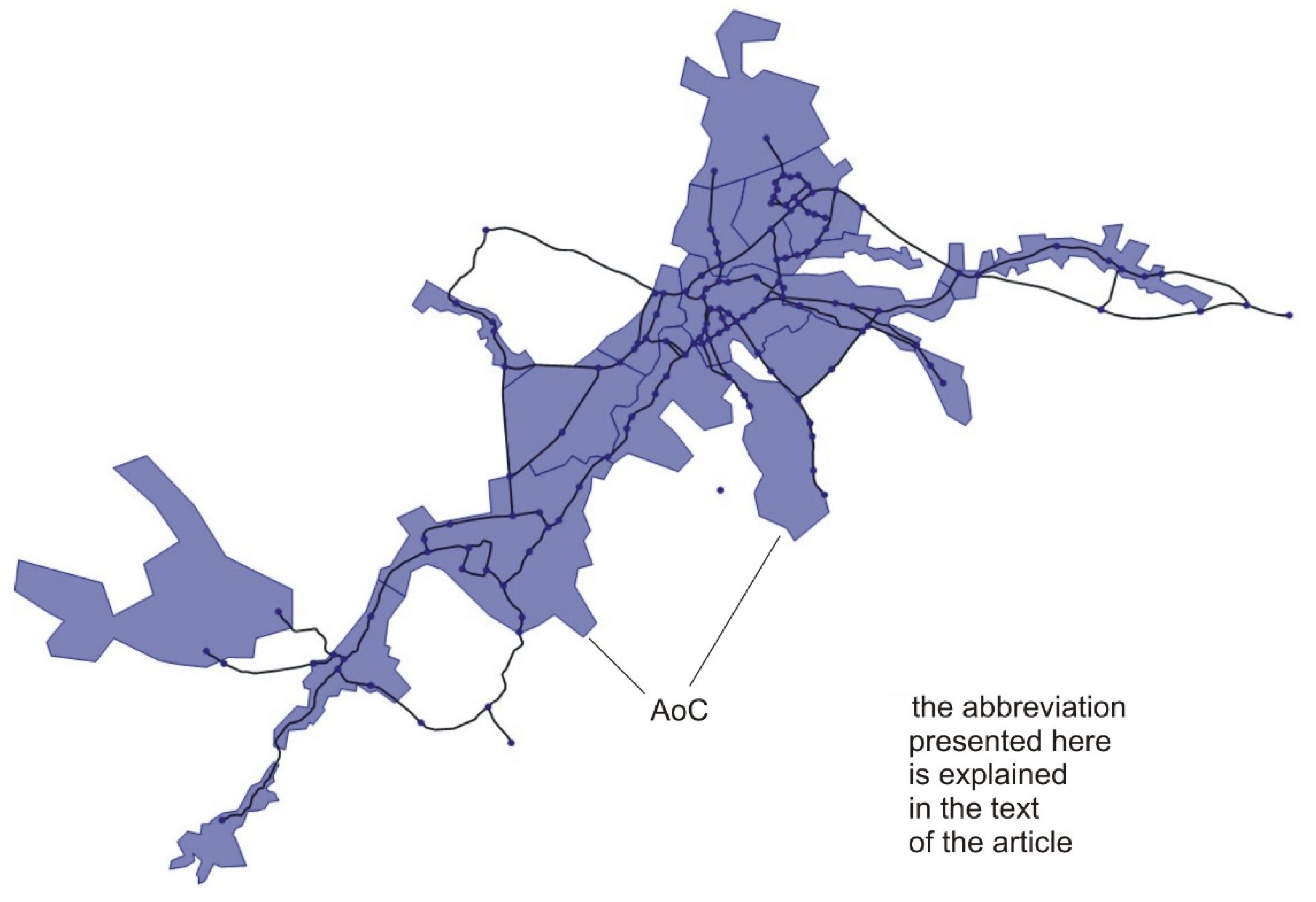
Figure 8 shows an exemplary simplified road network modeled in PTV Visum. The figure shows the road connections. The transport zones are in blue. We assume that it will be approximately the same area as AoC. The nodes represented as dots show the intersections of the roads. Some of the nodes will be V2I points that register vehicles. At the same time, these will all be intersections with traffic lights. In the example of this network, there are 38 places with traffic lights. There will be more V2I devices in the Smart City, which will increase the accuracy of the data. Nevertheless, the traffic light network has a density similar to that of the Bluetooth scanner networks in the literature.
In the literature, data mining for transportation purposes is widely discussed. This may be controversial, but tracking people’s movements to some extent is needed to allow effective movement inside cities. IoT devices that manage autonomous vehicle movement can provide the data. However, data can be anonymized. The owners of IoT systems should be able to give the data to the traffic modelers without legal problems by anonymizing it.
Therefore, Big Data analytics can reproduce and monitor traveler behavior. An example of using state infrastructure to create transport models is the TranStat project of the Polish Central Statistical Office, completed in 2022. Data from an application that collects tolls on highways were used in the project. Cloud-based systems can be used for the same purpose. For the creation of a Smart City, residents’ movements will need to be planned and analyzed to achieve a reduction in congestion.
7. Discussion about the Effectiveness of the Proposed Tools in Specific Cases
The discussion section suggests usable technology in each concept. In case 1, a signal can be sent directly from the workers to the vehicle. However, this must be executed with enough time for the vehicle to change lanes. Short-range technologies such as Wi-Fi or Bluetooth are not suitable in this case. While achieving long ranges with sufficient transmitter and receiver power is possible with Bluetooth, the case 1 vehicle is low (standard car height is less than 2 m). The height is lower when held by a worker and will cause the ground to be in the Fresnel zone, reducing the range. The possible range of Bluetooth technology in case 1 could be the subject of further research.
We recommend sending the signal through a GSM network with a range of about 10 km. This is more than enough to change lanes at the optimal time. To reduce latency, the recommendation is to use the 5G network. Nevertheless, the previous standard, LTE, also fulfills its role when communicating with vehicles, as mentioned in
Section 2.
In case 2, the signal can have a range of the length of the car queue that will start to move at the next green traffic light, so Bluetooth is sufficient. Class 1 Bluetooth devices are assumed to have a range of 100 m. However, in the conceptions of cases described in this paper, Bluetooth is used outdoors, increasing its range. Using Wi-Fi that operates at the same frequency can have similar results. It also seems reasonable to propose DSRC. Short-range communication has a range of several hundred meters. According to [
40], in good weather conditions on a highway, it reaches a range of up to 230 m, but in bad weather conditions, only up to 140 m. Nevertheless, this is sufficient in an urban application. The range may differ based on the DSRC devices used. In the literature, Li-Fi has also been proposed for this purpose. The greatest advantage of using it in an urban environment is its non-radio form. Therefore, it will not be possible for other devices to interfere with the signal.
In case 3, GSM-R can be used in the communication of trains. GSM-R is a variant of the GSM network that uses a frequency assigned to the railway and aligns with the European Rail Traffic Management System [
41]. Therefore, the frequency will not be compatible with the V2I communication of automotive vehicles. Furthermore, the design of the GSM-R network is intended to cover the railroad lines and not necessarily their surroundings. Another system should connect to motor vehicles in the AoC. Due to the low road class and the corresponding lower speed limit, wide technology coverage will not be required. DSRC or Bluetooth for adequate driver response will suffice. GPS determines the position and speed of vehicles. This is necessary to determine the time when the vehicles will be at the crossing.
In case 4, all the technologies mentioned in the paper used in V2I will be suitable for data collection. Travel modeling and traffic studies use a wide range of wireless technologies, such as Bluetooth and Wi-Fi scanners [
42]. Bluetooth has more potential [
43], and current research has been able to group traveler types [
44]. To detect Bluetooth devices, they must be in visibility mode. V2V communication in the form of Vehicular Ad Hoc Networks (VANETs) requires the ability to connect to the vehicle in different situations. Thus, vehicles equipped with OBUs will have Bluetooth enabled all the time in visibility mode while driving. This may affect the higher detectability of vehicles with “classic” Bluetooth scanners. However, IoT devices, such as in case 2, will also be able to serve as scanners. We suggest designing devices to collect OBU ID numbers for traffic modeling.
Similarly, it is hypothetically possible to create vehicle detection scanners that operate on DSRC or Li-Fi. The use of DSRC and Li-Fi would be analogous to Bluetooth and Wi-Fi, but no research has been conducted on this topic due to its lower prevalence. Bluetooth is used for traffic modeling not because of its prevalence in V2I or V2V communications, but because of other applications, such as hands-free kits.
The cellular network is more discussed in terms of traffic modeling. It allows the creation of O-D (origin–destination) matrices [
45]. In [
46], a study in Boston was mentioned, where with BTS and census data, it was possible to divide travelers into those who travel by car, public transport, and on foot. It is possible to establish a modal split for each transport region. The AllAboard system, which uses cell phone data to optimize public transport, was also mentioned. The algorithm proposes to reroute lines, increasing the number of travelers and reducing travel and waiting times. Two options to detect traveler activity are given in [
47]. One uses time frequency rules or probabilistic methods. However, a problem of a different nature may arise. In signal bases, it is necessary to distinguish between existing SIM cards in phones and autonomous vehicles that connect to networks. If this is not possible, trips duplicate if the driver or passengers have cell phones. If it is technically impossible to distinguish between a vehicle and a phone SIM card, the development of V2I technology may negatively impact traffic studies. If differentiation is possible, research would not be compromised. For example, it would be possible to estimate vehicle occupancy rates.
Mining data from GPS-equipped vehicles would result in the highest precision in research. Determining the location of the vehicles would be possible with higher accuracy. In the case of Wi-Fi and Bluetooth, the precise determination of origin or destination is impossible. In the case of cell phone networks, it is possible to determine only the area of the zone covered by the BTS (base transceiver station) zone.
More accurate information can come from cloud-based systems. For example, with Mobility as a Service (MaaS) applications, the user would choose the exact route of travel, and the car sharing fleet would record the user’s movements.
Some of the cases suggest several forms of communication. Vehicle communication with the infrastructure must be coordinated. The preferred form of coordinating communication will be C-ITS, as proposed in [
48,
49]. Communication should also have standardized protocols. IEEE proposes the WAVE standard [
50] to ensure V2X connectivity in a consistent, interoperable, and timely manner. It is also the standard recommended in SAE J2735. The WAVE standard is compatible with ITS.
Our greatest hopes are in the development of GPS and MaaS-based systems due to the precision of the data and the lower bias estimated with it. However, this does not diminish the research value of the other technologies. Combined data can give a broader picture of the transportation situation, and comparing different sources will help reduce bias [
51].
8. Conclusions
Four cases are presented here with the proposed use of IoT technology for V2I communication of autonomous vehicles with different degrees of automation. Case 1 describes a solution to the problem of detecting a moving hazard on major roads. The main focus was on the neglected problem of difficulties such as maintenance works and road construction tests. The suggested solution is to equip workers or safety vehicles with transmitters that send a warning or lane change command via the 5G network. Case 2 concerns typical urban situations, necessary in the idea of a Smart City—i.e., communication of traffic lights with vehicles and effective management of their movement. Two variants are considered: when the percentage of autonomous vehicles is low, and when traffic is fully autonomous. When traffic is fully automated, a solution for pedestrian traffic is proposed by suggesting a two-phase signal system, with one phase for autonomous vehicle passing and a separate one for pedestrians to allow pedestrian scrambling. Case 3 concerns communication at railroad crossings in suburban and urban areas. Case 4 concerns the collection of traveler movement information in the Smart City. Proposed V2I communication technologies can be used for data collection. The discussion section proposes possible technologies to be used in each case.
We suggest that solutions such as those proposed or similar should be developed in the near future. The prospect of a large share of autonomous vehicles on the road will be a matter in the coming decades [
1]. As case 4 shows, IoT systems in transport should be designed with data mining in mind.
This paper presents only innovative ideas, intentionally without the research component. Future research will develop all the cases. We will conduct further simulations and research based on the proposed cases with acknowledgement of all the feedback.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}