

An Optimized Solution for Fault Detection and Location in Underground Cables Based on Traveling Waves


 ,
,  , ,
, ,  ,
, 
Abstract
:1. Introduction
- A novel fault detection and location framework for underground cables based on a DWT is developed;
- The proposed model efficiently identifies the faulty sections and fault locations where coordination schemes optimize the overcurrent-relay and timing-relay coordination;
- The DWT approach for the objectives mentioned above is modeled to facilitate the protective zone, analyzed by Newton–Raphson analysis (NRA), more accurately;
- The model is tested for 11 and 16-node networks for underground cables, and it obtained a remarkable improvement in accurately detecting and locating the cable’s faults.
2. Literature Review
3. Modeling of Wavelet Transform for Fault Location
4. Research Methodology
4.1. Protection Coordination
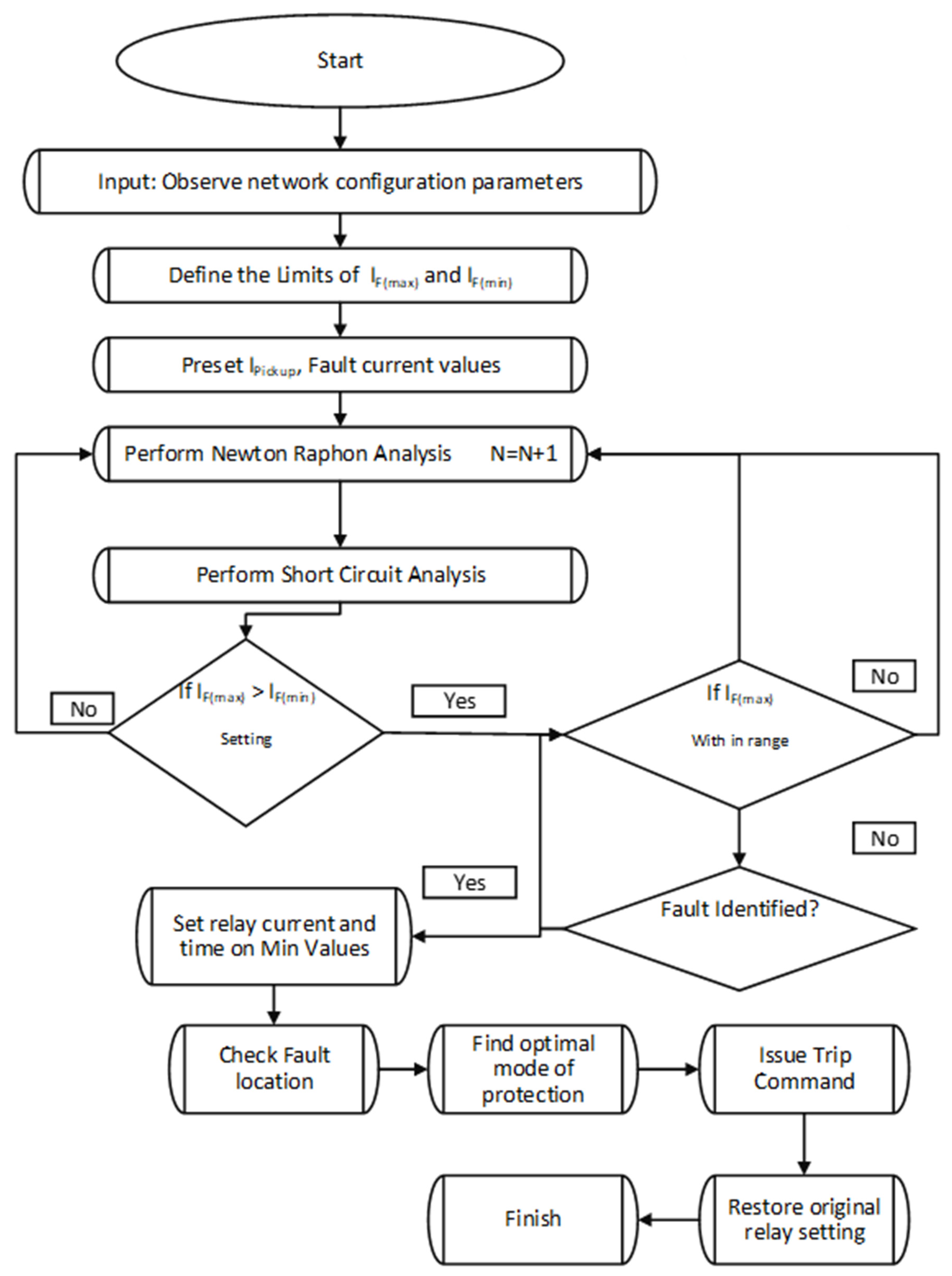
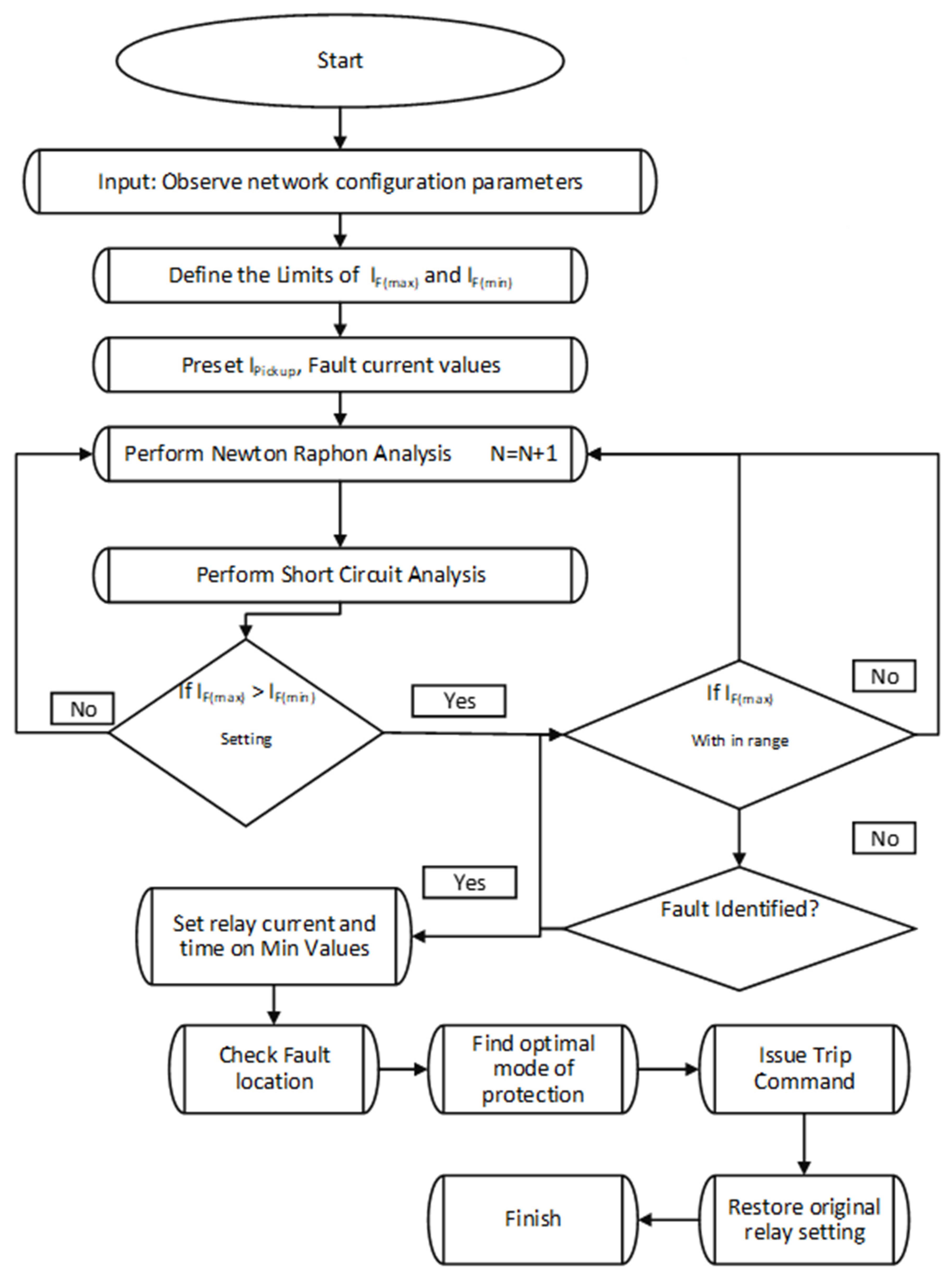
- Observe the network limits and record the required parameters. These are recorded by voltage and current measurements;
- Define the limits of the maximum fault current () and minimum fault current (), depending on the design procedure of the circuit breaker;
- Preset the value of and the fault current of any value for each relay. This depends on the plug setting and time setting of the relay;
- After entering the protection mode, perform an NRA based on short-circuit faults and load conditions. This step is essential for issuing the trip command and restore command (after clearing the fault). It is a continuous process for each iteration at ;
- Observe the setting > . If it is false, then there is no need for further processing (perform NRA again). If it is true, then observe the range set in the first step;
- If the range exceeds, then look at the fault occurring; otherwise, perform an NRA. If the fault exists, then set the relay current and time on min values;
- Check the fault location and find the optimal mode of protection. This selects the only faulty portion, which is a good attribute of any fault-management system;
- Issue the trip command and restore the original setting.
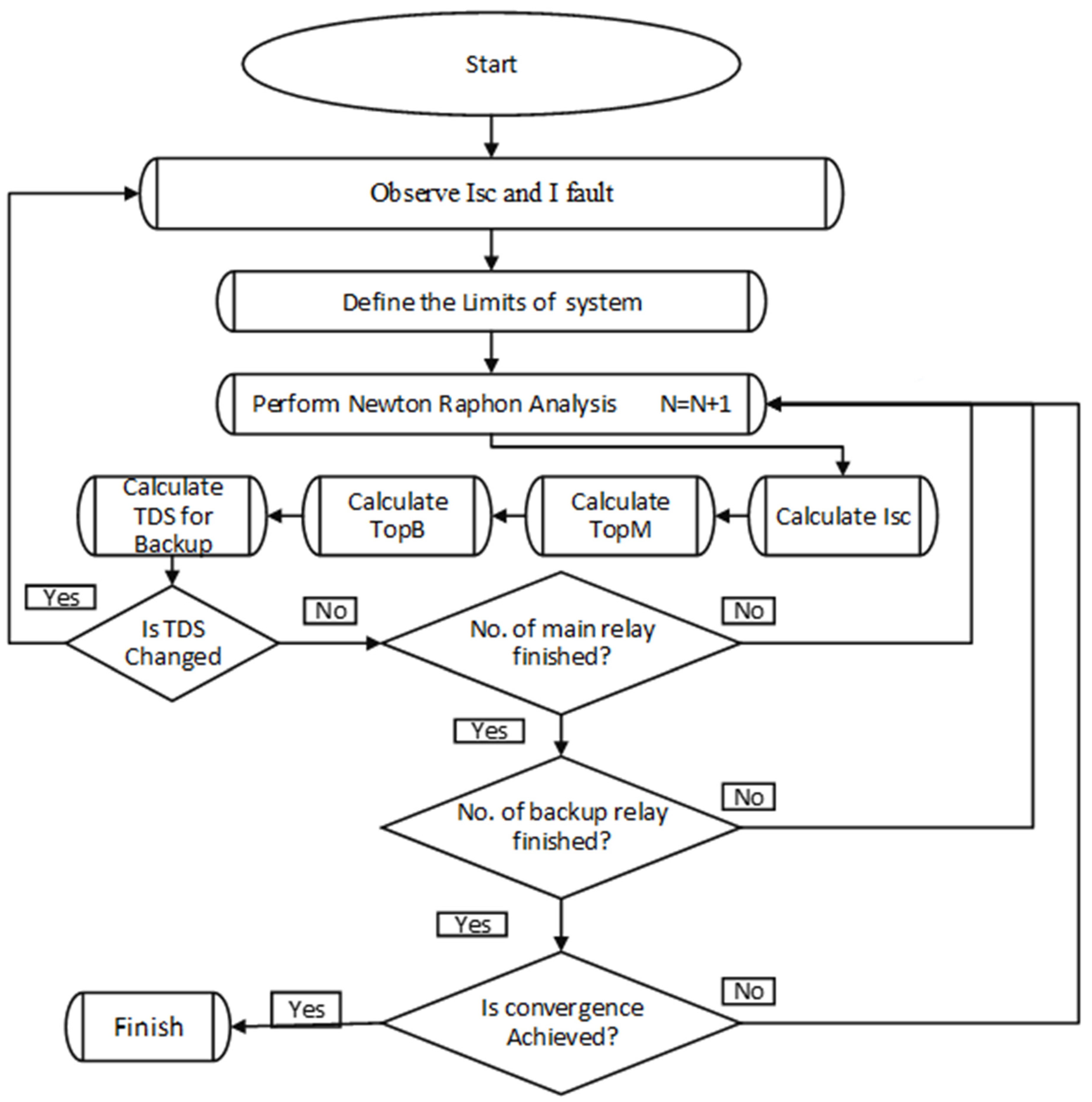
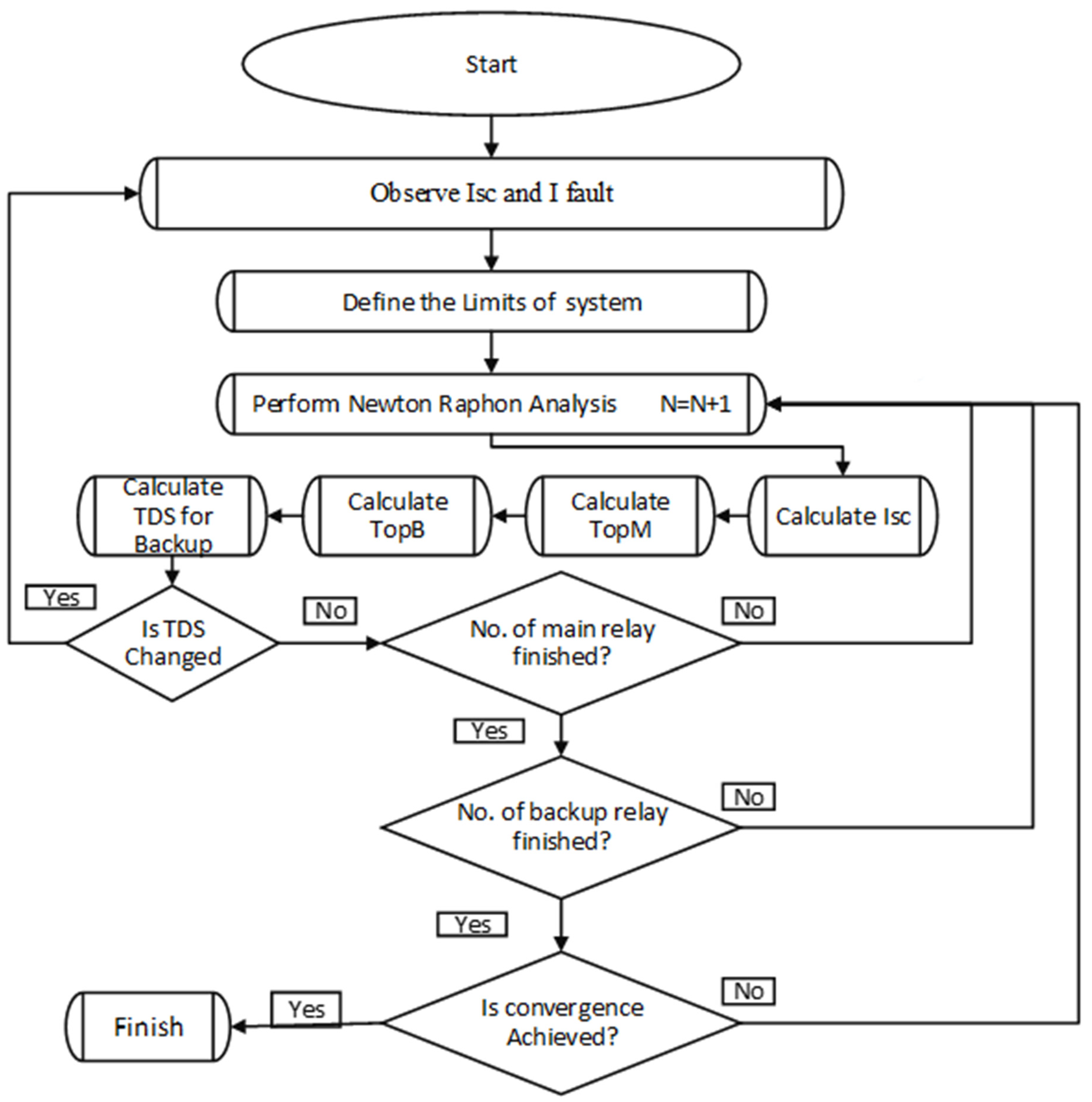
- After obtaining the overcurrent-relay-coordination values of the fault current and short-circuit currents (), it starts. It only operates after a fault occurs;
- Perform NRA as per the limits decided for the proposed model. This step starts the loop operation for the optimal operation;
- Calculate , the operational time of the main relay (), the operation time of the backup relay (), and at the end, calculate the TDS (time dial setting). These parameters are needed for the relay coordination;
- If the TDS changes, return to the first step; otherwise, look at the main relay. If the main relays are finished, observe the backup relay; otherwise, perform NRA;
- See that the backup relays are finished. If YES, perform NRA. If NO, then end the protection zone.
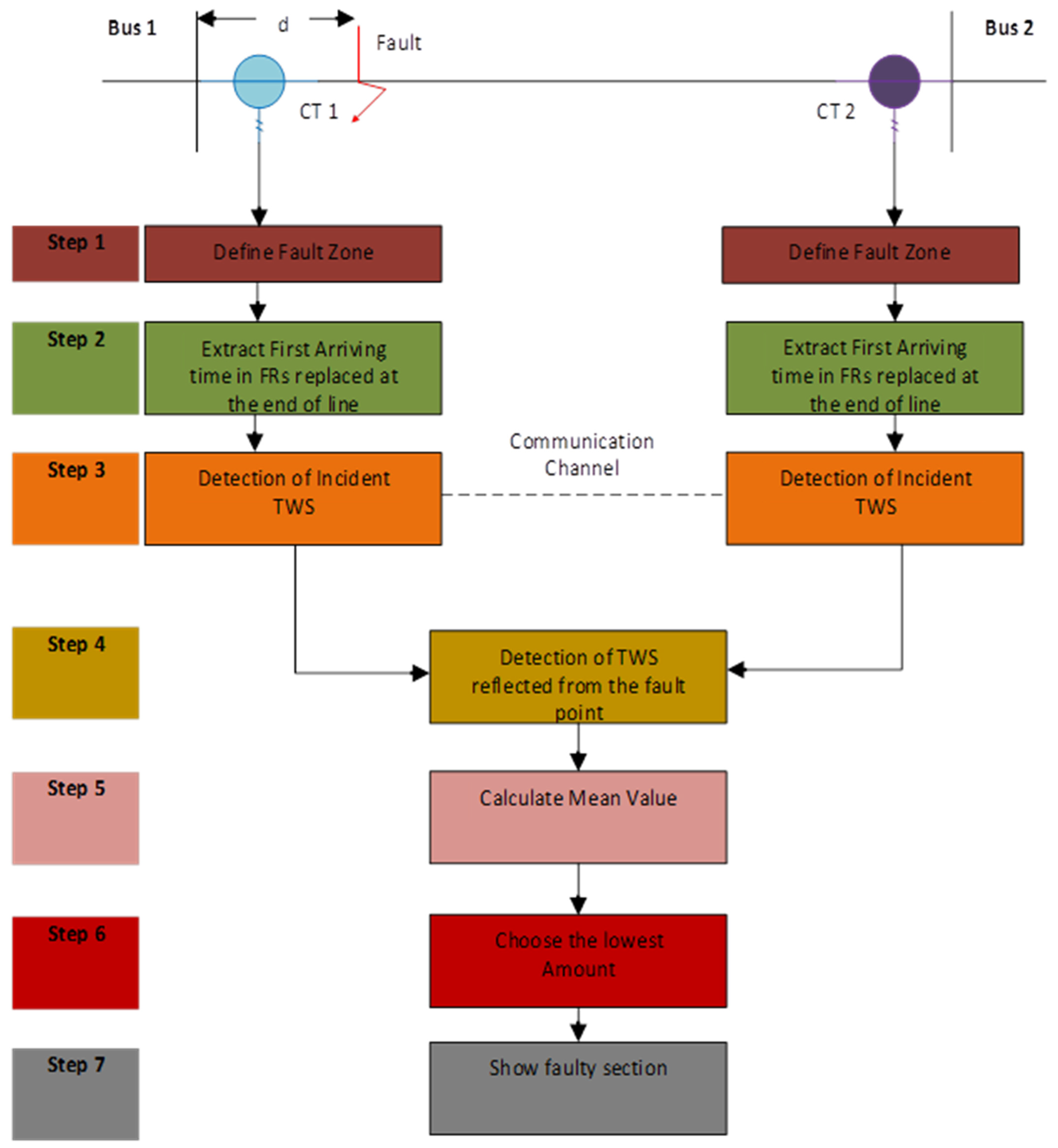
4.2. Protection Coordination for Faulty-Section Detection
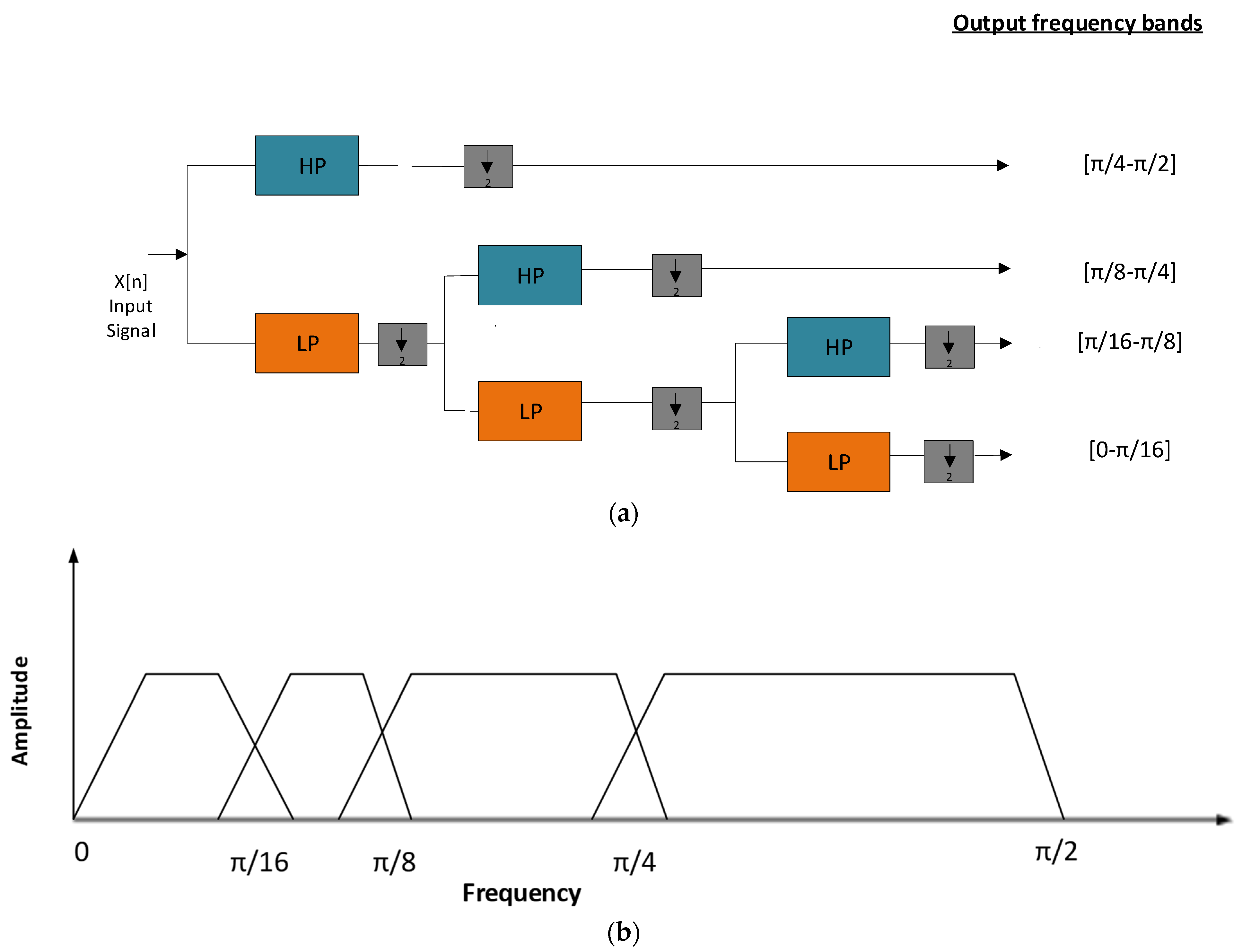
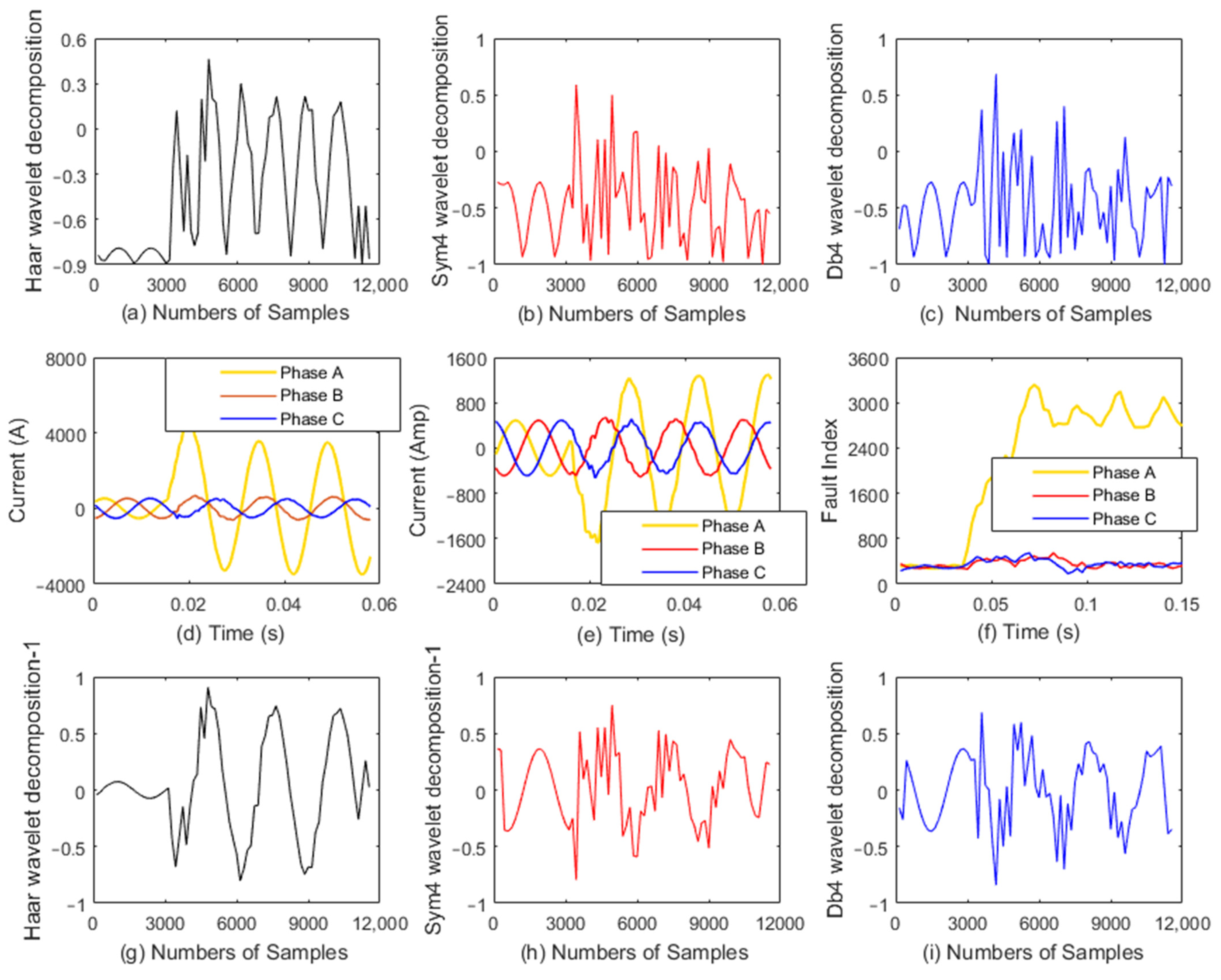
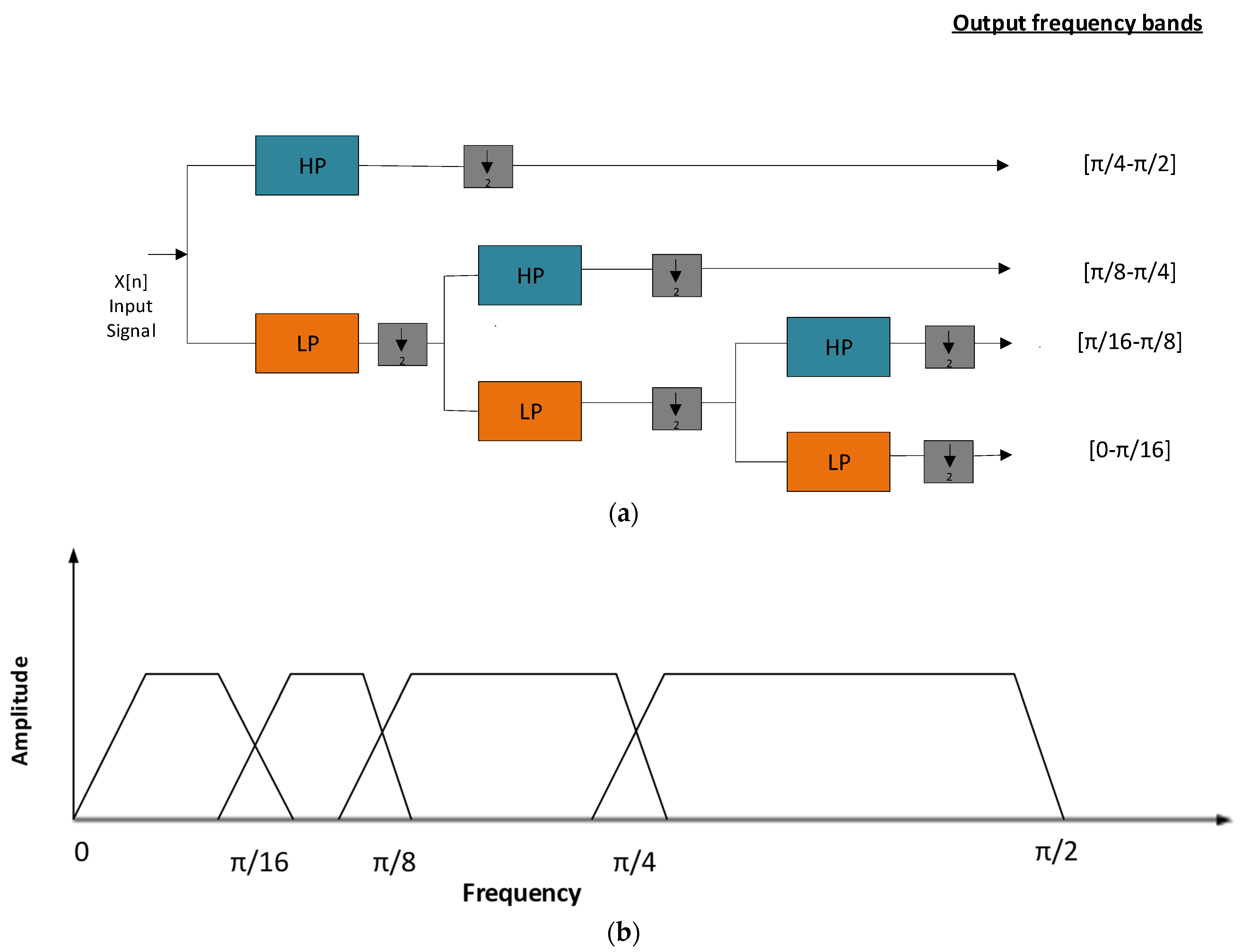
- Define the fault zone and observe the distance. This is performed by the communication channel provided in the proposed DWT methodology. Before sending the information to the FLs, the CWT process is started, which convolves the signal with the wavelet basis function, as shown in the Figure 2a. By extracting the first arriving time of both ends with fault resistance, the communication system sends the wavelet information to the FLs. Filter the signals and compare them with the threshold for detecting the DWT. Equation (1) defines the CWT process. Then, the system understands the DWT, and the inputs are considered in the timeframe and frequency band for high frequency and high resolution separately, as shown in Figure 2b. This is defined by Equations (2) and (3). Equation (3) does not have enough of a spectrum as the actual project required, and decomposition was needed for expansion. This is completed in Equation (4);
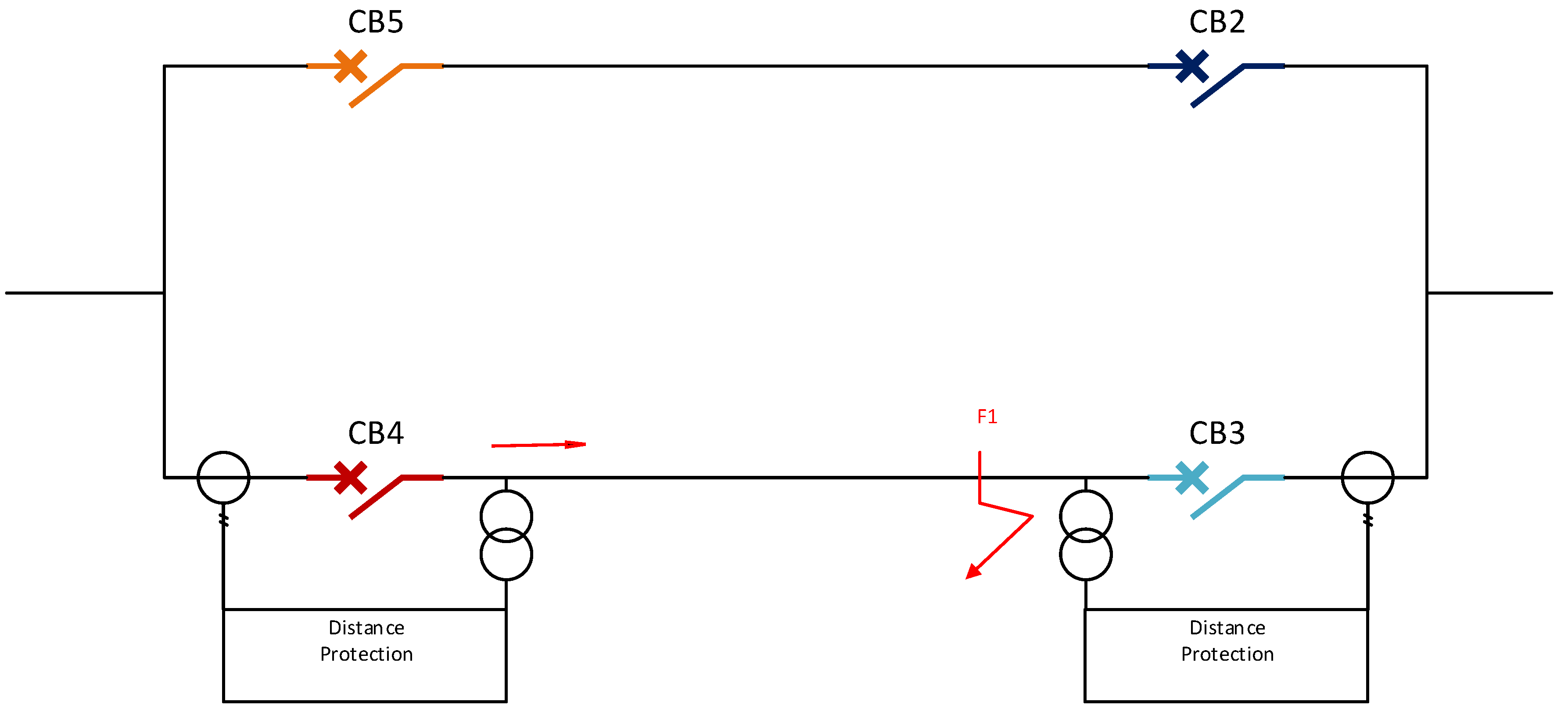
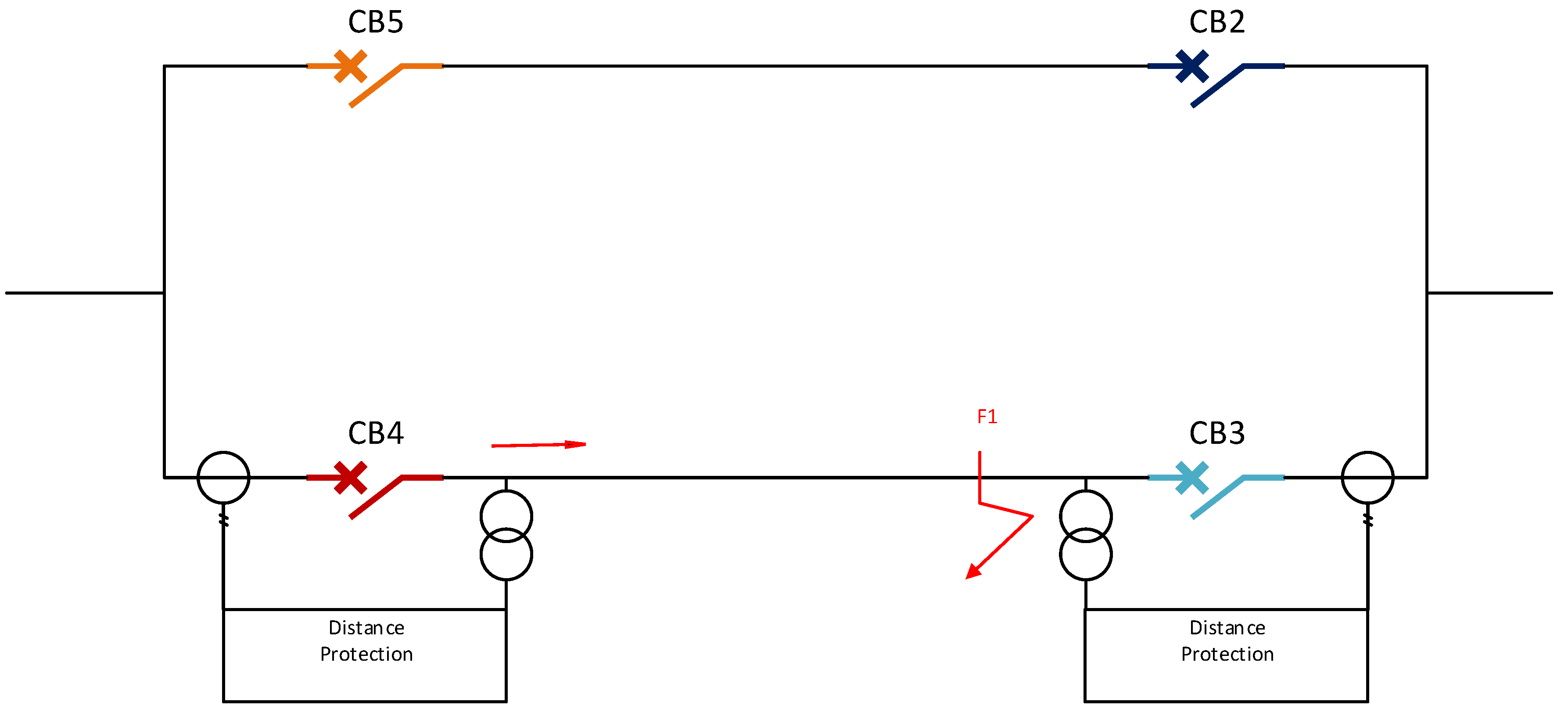
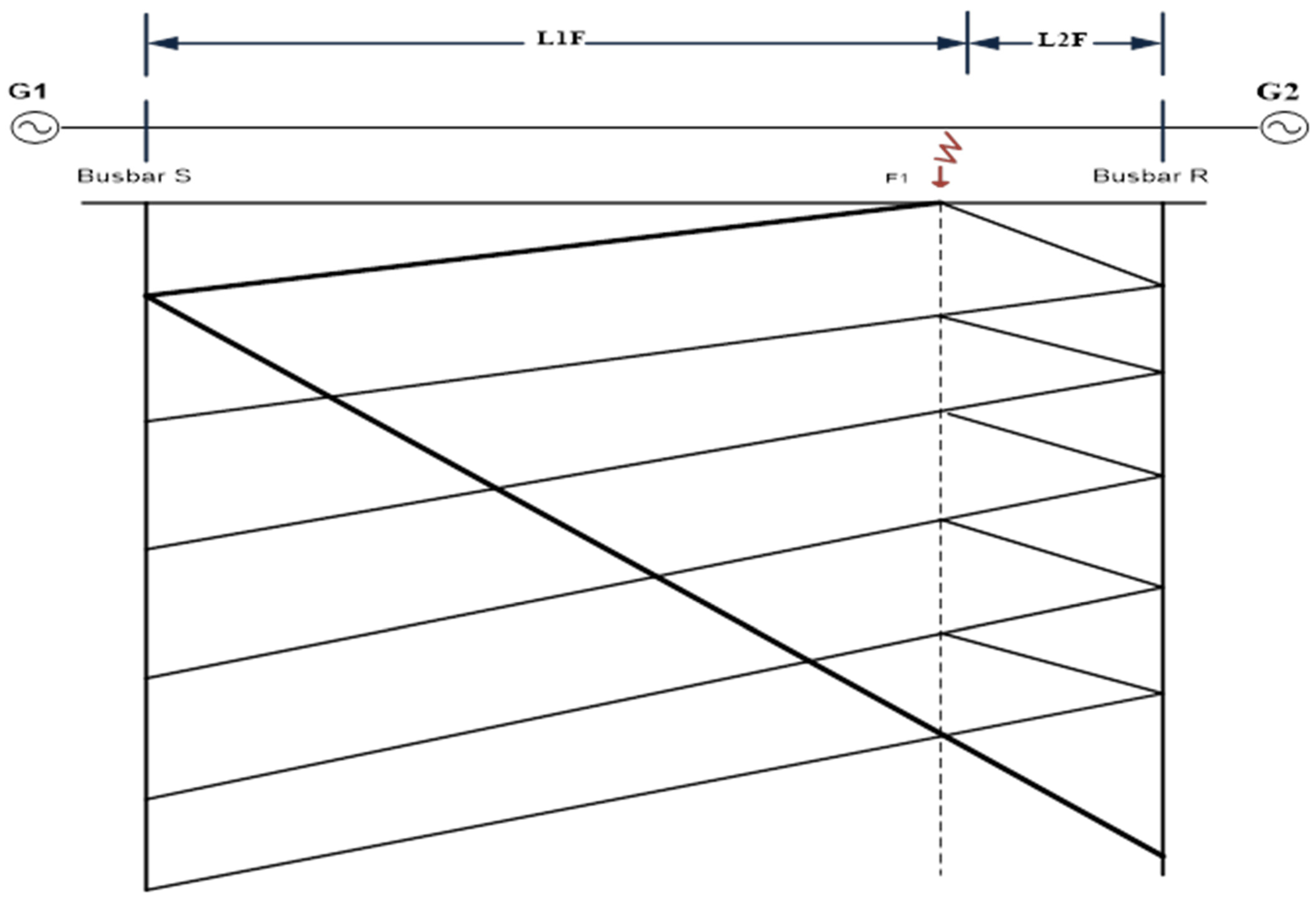
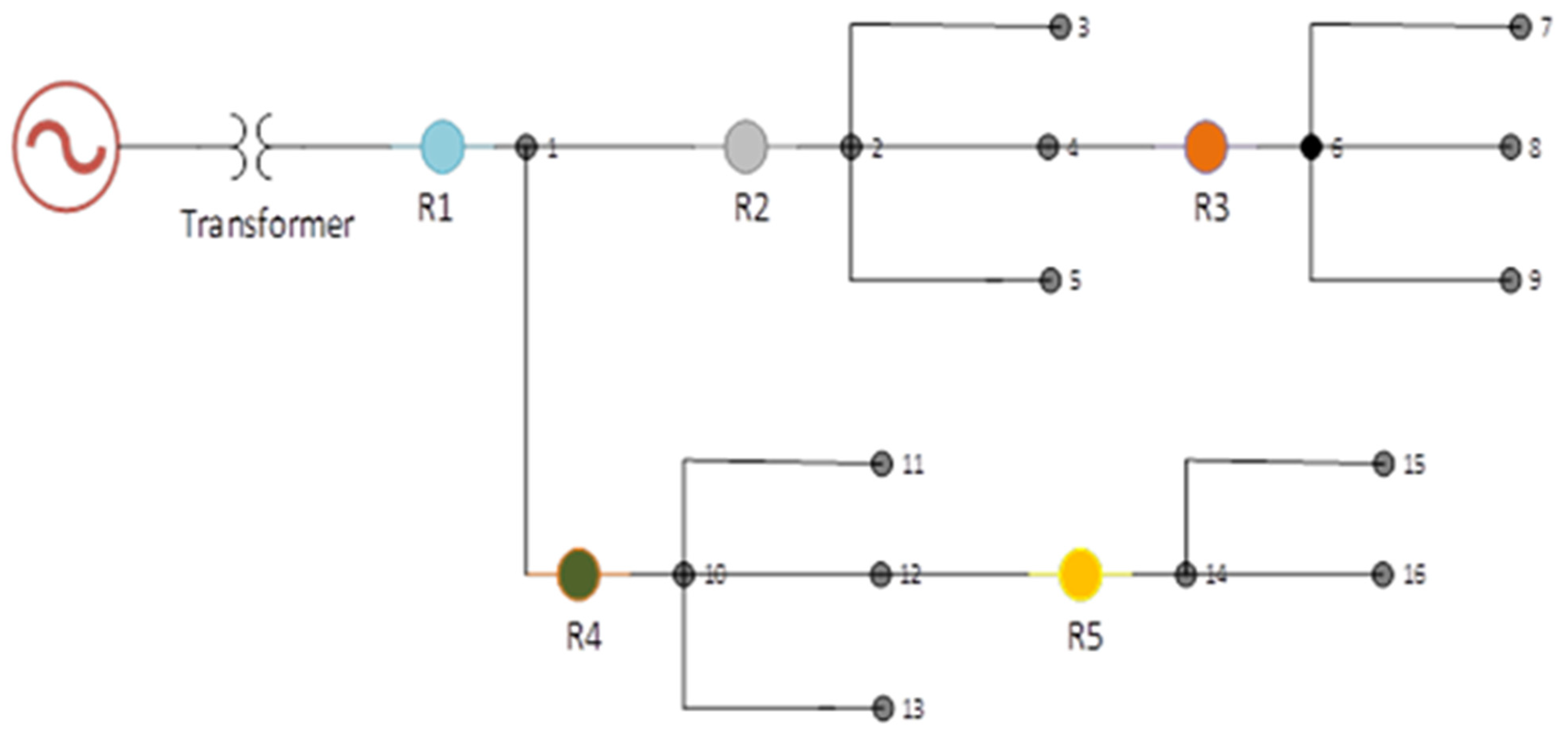
- Compute the fault distance from the fault point where the TWs are reflected. In this step, there are two lines at CT1 and CT2 that compute the distance, as shown in Figure 6. The traveling-wavelet-propagation speed is v, as per the two-line theory given in Figure 3, and the expressions are solved in Equations (5) and (6);
- After computing the fault distance from the fault point at which the TWs are reflected and the fault distance, compensate the latency effect by the communication system;
- Compute the Clarke-transformation matrices, as discussed in Equations (7) and (8), to reduce the electromagnetic coupling effect;
- Take measurements of the two ends as a time instant at the peak of the absolute value in the filtered signals;
- Calculate the mean value of Step 5;
- Choose the lowest amount;
- Show the faulty location.
5. Proposed Setup
6. Result Discussion
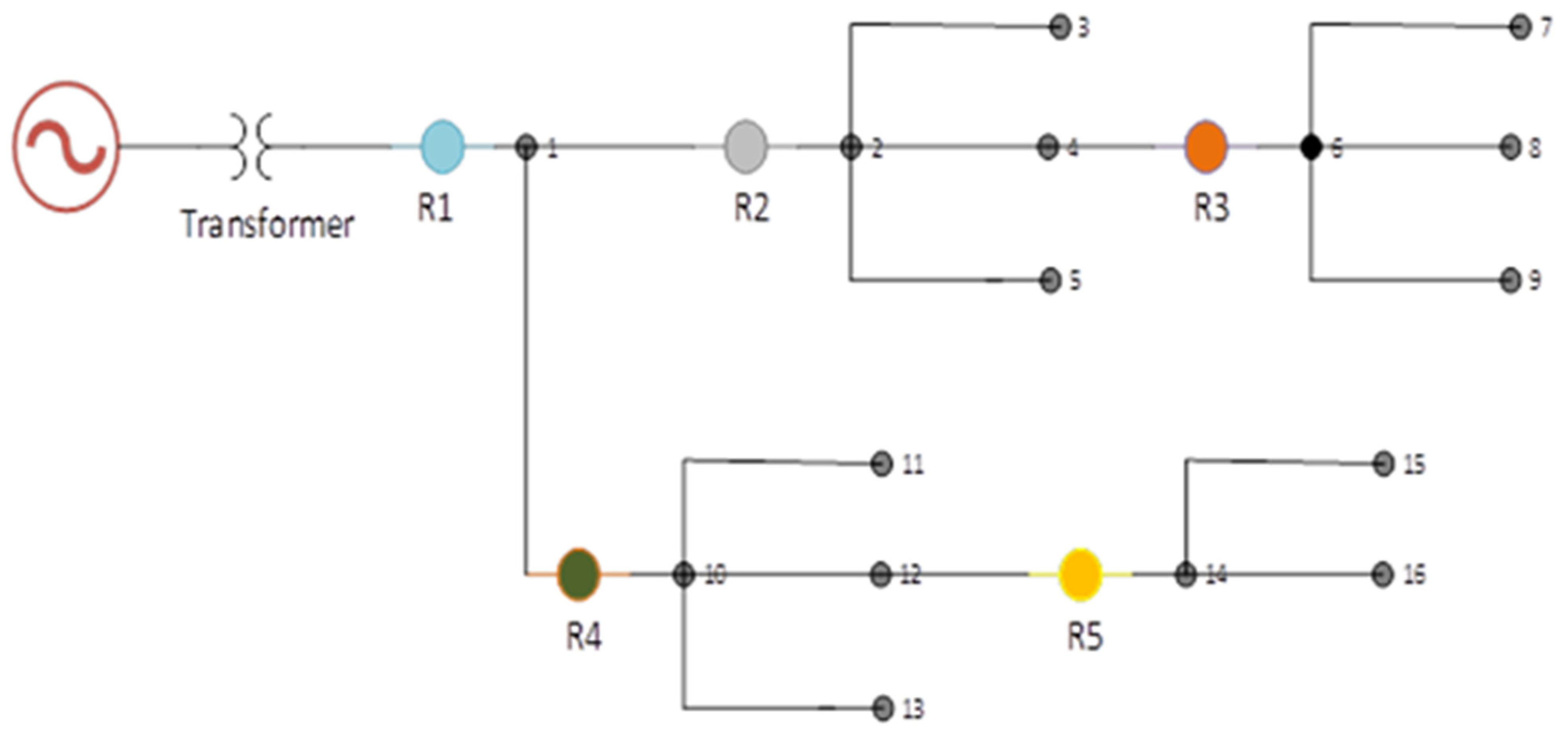
- If faults accrue at bus-9, then R3 has to operate and R2 and R1 are the backup relay, as both have slower operating times than R1;
- If faults accrue in bus-10, then R4 has to operate and R1 is the backup relay, as it has a slower operating time than R4;
- If faults accrue in bus-11, then R4 has to operate and R5 and R1 are the backup relays, as both have slower operating times than R4;
- If faults accrue in bus-3, then R2 has to operate and R1 is the backup relay, as it has a slower operating time than R2;
- If faults accrue in bus-6, then R3 has to operate and R2 and R1 are the backup relays, as they both have slower operating times than R3.
7. Conclusions and Future Studies
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- He, X.; Zhao, L.; Xie, X.; Yao, Z. High-Precision Relocation and Event Discrimination for the 3 September 2017 Underground Nuclear Explosion and Subsequent Seismic Events at the North Korean Test Site. Seismol. Res. Lett. 2018, 89, 2042–2048. [Google Scholar] [CrossRef]
- Booske, J.H.; Converse, M.C.; Gallagher, D.A.; Kreischer, K.E.; Heinen, V.O.; Kory, C.L.; Chevalier, C.T. Parametric modeling of folded waveguide circuits for millimeter-wave traveling wave tubes. In Proceedings of the Third IEEE International Vacuum Electronics Conference, Monterey, CA, USA, 25 April 2002; Volume 52, p. 47. [Google Scholar] [CrossRef]
- Milioudis, A.; Andreou, G.; Labridis, D. On-line partial discharge monitoring system for underground MV cables—Part II: Detection and location. Int. J. Electr. Power Energy Syst. 2019, 109, 395–402. [Google Scholar] [CrossRef]
- Santos, M.R.; Costa, B.S.J.; Bezerra, C.G.; Andonovski, G.; Guedes, L.A. An evolving approach for fault diagnosis of dynamic systems. Expert Syst. Appl. 2022, 189, 115983. [Google Scholar] [CrossRef]
- Raj, R.; Althaf, J.; Imthiaz, M. Underground Cable Fault Detection Using Robot. Int. J. Electr. Comput. Eng. 2013, 3, 145–151. [Google Scholar] [CrossRef]
- Furse, C.M.; Kafal, M.; Razzaghi, R.; Shin, Y.J. Fault Diagnosis for Electrical Systems and Power Networks: A Review. IEEE Sens.J. Inst. Electr. Electron. Eng. 2021, 201, 888–906. [Google Scholar] [CrossRef]
- Li, X.; Dyśko, A.; Burt, G.M. Traveling wave-based protection scheme for inverter-dominated microgrid using mathematical morphology. IEEE Trans. Smart Grid 2014, 5, 2211–2218. [Google Scholar] [CrossRef]
- Rong, X.; Shek, J.K.H.; Macpherson, D.E.; Mawby, P. The Effects of Filter Capacitors on Cable Ripple at Different Sections of the Wind Farm Based Multi-Terminal DC System. Energies 2021, 14, 7000. [Google Scholar] [CrossRef]
- Borghetti, A.; Corsi, S.; Nucci, C.A.; Paolone, M.; Peretto, L.; Tinarelli, R. On the use of continuous-wavelet transform for fault location in distribution power systems. Int. J. Electr. Power Energy Syst. 2006, 28, 608–617. [Google Scholar] [CrossRef]
- Joye, C.D.; Cook, A.M.; Calame, J.P.; Abe, D.K.; Vlasov, A.N.; Chernyavskiy, I.A.; Nguyen, K.T.; Wright, E.L.; Pershing, D.E.; Kimura, T.; et al. Demonstration of a high power, wideband 220-GHz traveling wave amplifier fabricated by UV-LIGA. IEEE Trans. Electron Devices 2014, 61, 1672–1678. [Google Scholar] [CrossRef]
- Abu-Siada, A.; Mir, S. A new on-line technique to identify fault location within long transmission lines. Eng. Fail. Anal. 2019, 105, 52–64. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, J.; Chen, Y.; Gruteser, M.; Yang, J.; Liu, H. E-eyes: Device-free location-oriented activity identification using fine-grained wifi signatures. In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking, Maui, HI, USA, 7–11 September 2014; pp. 617–628. [Google Scholar]
- Sabug, L.; Musa, A.; Costa, F.; Monti, A. Real-time boundary wavelet transform-based DC fault protection system for MTDC grids. Int. J. Electr. Power Energy Syst. 2020, 115, 105475. [Google Scholar] [CrossRef]
- Arita Torres, J.; dos Santos, R.C.; Yang, Q.; Li, J. Analyses of different approaches for detecting, classifying and locating faults in a three-terminal VSC-HVDC system. Int. J. Electr. Power Energy Syst. 2022, 135, 107514. [Google Scholar] [CrossRef]
- Montoya, R.; Poudel, B.P.; Bidram, A.; Reno, M.J. DC microgrid fault detection using multiresolution analysis of traveling waves. Int. J. Electr. Power Energy Syst. 2022, 135, 107590. [Google Scholar] [CrossRef]
- Manarikkal, I.; Elasha, F.; Mba, D. Diagnostics and prognostics of planetary gearbox using CWT, auto regression (AR) and K-means algorithm. Appl. Acoust. 2021, 184, 108314. [Google Scholar] [CrossRef]
- Naidu, K.; Ali, M.S.; Abu Bakar, A.H.; Tan, C.K.; Arof, H.; Mokhlis, H. Optimized artificial neural network to improve the accuracy of estimated fault impedances and distances for underground distribution system. PLoS ONE 2020, 15, e0227494. [Google Scholar] [CrossRef]
- Amiruddin, A.A.A.M.; Zabiri, H.; Taqvi, S.A.A.; Tufa, L.D. Neural network applications in fault diagnosis and detection: An overview of implementations in engineering-related systems. Neural Comput. Appl. 2020, 32, 447–472. [Google Scholar] [CrossRef]
- Ahmad, I.; Mabuchi, H.; Kano, M.; Hasebe, S.; Inoue, Y.; Uegaki, H. Data-Based Fault Diagnosis of Power Cable System: Comparative Study of k-NN, ANN, Random Forest, and CART. IFAC Proc. Vol. 2011, 44, 12880–12885. [Google Scholar] [CrossRef]
- Elmitwally, A.; Mahmoud, S.; Abdel-Rahman, M.H. Fault Detection and Identification of Three Phase Overhead Transmission Lines Ended with Underground Cables (Dept. E). MEJ. Mansoura Eng. J. 2020, 35, 129–137. [Google Scholar] [CrossRef]
- Guo, Y.; Li, B.-Z.; Yang, L.-D. Novel fractional wavelet transform: Principles, MRA and application. Digit. Signal Processing 2021, 110, 102937. [Google Scholar] [CrossRef]
- Dutta, A.; Noor, M.N.F.; Khan, M.R.A.; Shuva, S.K.S.; Razzak, M.A. Identification and Tracking of Underground Cable Fault Using GSM and GPS Modules. In Proceedings of the 2021 Innovations in Power and Advanced Computing Technologies (i-PACT), Kuala Lumpur, Malaysia, 27–29 November 2021; pp. 1–5. [Google Scholar]
- Mansingh, R.K.R.; Rajesh, R.; Ramasubramani, S.; Ramkumar, G. Underground Cable Fault Detection using Raspberry Pi and Arduino. Int. J. Emerg. Technol. Eng. Res. 2017, 5, 1–5. [Google Scholar]
- Asif, R.M.; Hassan, S.R.; Rehman, A.U.; Rehman, A.U.; Masood, B.; Sher, Z.A. Smart underground wireless cable fault detection and monitoring system. In Proceedings of the 2020 International Conference on Engineering and Emerging Technologies (ICEET), Lahore, Pakistan, 27–28 October 2020; pp. 1–5. [Google Scholar]
- Jabbar, W.A.; Wei, C.W.; Azmi, N.A.A.M.; Haironnazli, N.A. An IoT Raspberry Pi-based parking management system for smart campus. Internet Things 2021, 14, 100387. [Google Scholar] [CrossRef]
- Samuel, I.A.; Olajube, A.; Awelewa, A.A.; Utibe, B. Arduino microcontroller based underground cable fault distance locator. Int. J. Mech. Eng. Technol. 2019, 10, 890–902. [Google Scholar]
- Quilty, J.; Adamowski, J. Addressing the incorrect usage of wavelet-based hydrological and water resources forecasting models for real-world applications with best practices and a new forecasting framework. J. Hydrol. 2018, 563, 336–353. [Google Scholar] [CrossRef]
- Shaikh, M.S.; Ansari, M.M.; Jatoi, M.A.; Arain, Z.A.; Qader, A.A. Analysis of underground cable fault techniques using MATLAB simulation. Sukkur IBA J. Comput. Math. Sci. 2020, 4, 1–10. [Google Scholar]
- Dashti, R.; Daisy, M.; Mirshekali, H.; Shaker, H.R.; Hosseini Aliabadi, M. A survey of fault prediction and location methods in electrical energy distribution networks. Measurement 2021, 184, 109947. [Google Scholar] [CrossRef]
- Saleem, U.; Arshad, U.; Masood, B.; Gul, T.; Khan, W.A.; Ellahi, M. Faults detection and classification of HVDC transmission lines of using discrete wavelet transform. In Proceedings of the 2018 International Conference on Engineering and Emerging Technologies (ICEET), Lahore, Pakistan, 22–23 February 2018; pp. 1–6. [Google Scholar]
- Kapoor, G. Evaluation of fault location in three phase transmission lines based on discrete wavelet transform. ICTACT J. Microelectr. 2020, 6, 890–897. [Google Scholar]
- Ali, M.S. Investigate the Effect of Artificial Neural Network Parameters to Improve Fault Distance and Impedance Accuracy. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Sanya, China, 12–14 November 2021; Volume 1127, p. 12037. [Google Scholar]
- Rajpoot, S.C.; Pandey, C.; Rajpoot, P.S.; Singhai, S.K.; Sethy, P.K. A Dynamic-SUGPDS Model for Faults Detection and Isolation of Underground Power Cable Based on Detection and Isolation Algorithm and Smart Sensors. J. Electr. Eng. Technol. 2021, 16, 1799–1819. [Google Scholar] [CrossRef]
- Das, S.; Mondal, A.; Patel, B. Detection and Classification of Faults on the Transmission Line Using Lissajous Figure. In Computational Advancement in Communication Circuits and Systems; Springer: Berlin/Heidelberg, Germany, 2020; pp. 81–88. [Google Scholar]
- Swaminathan, R.; Mishra, S.; Routray, A.; Swain, S.C. A CNN-LSTM-based fault classifier and locator for underground cables. Neural Comput. Appl. 2021, 33, 15293–15304. [Google Scholar] [CrossRef]
- Paul, D.; Mohanty, S.K.; Panigrahi, C.K. Classification of Power Swing using Wavelet and Convolution Neural Network. In Proceedings of the 2019 IEEE 5th International Conference for Convergence in Technology (I2CT), Pune, India, 29–31 March 2019; pp. 1–6. [Google Scholar]
- Ahmad, N.; Hanafi, D. Modelling and Simulation of Fault Distance Locator for Underground Cable Detection. Evol. Electr. Electron. Eng. 2021, 2, 876–884. [Google Scholar]
- Kulshrestha, A.; Mahela, O.P.; Gupta, M.K.; Gupta, N.; Patel, N.; Senjyu, T.; Danish, M.S.S.; Khosravy, M. A hybrid fault recognition algorithm using stockwell transform and wigner distribution function for power system network with solar energy penetration. Energies 2020, 13, 3519. [Google Scholar] [CrossRef]
- Mahela, O.P.; Khan, B.; Alhelou, H.H.; Siano, P. Power quality assessment and event detection in distribution network with wind energy penetration using stockwell transform and fuzzy clustering. IEEE Trans. Ind. Inform. 2020, 16, 6922–6932. [Google Scholar] [CrossRef]
- Ram Ola, S.; Saraswat, A.; Goyal, S.K.; Sharma, V.; Khan, B.; Mahela, O.P.; Haes Alhelou, H.; Siano, P. Alienation coefficient and wigner distribution function based protection scheme for hybrid power system network with renewable energy penetration. Energies 2020, 13, 1120. [Google Scholar] [CrossRef]
- Reda, A.; Al Kurdi, I.; Noun, Z.; Koubyssi, A.; Arnaout, M.; Rammal, R. Online Detection of Faults in Transmission Lines. In Proceedings of the 2021 IEEE 3rd International Multidisciplinary Conference on Engineering Technology (IMCET), Beirut, Lebanon, 8–10 December 2021; pp. 37–42. [Google Scholar]
- Aftab, M.A.; Hussain, S.M.S.; Ali, I.; Ustun, T.S. Dynamic protection of power systems with high penetration of renewables: A review of the traveling wave based fault location techniques. Int. J. Electr. Power Energy Syst. 2020, 114, 105410. [Google Scholar] [CrossRef]
- Dashtdar, M.; Dashti, R.; Shaker, H.R. Distribution network fault section identification and fault location using artificial neural network. In Proceedings of the 2018 5th International Conference on Electrical and Electronic Engineering (ICEEE), Istanbul, Turkey, 3–5 May 2018; pp. 273–278. [Google Scholar]
- Gowrishankar, M.; Nagaveni, P.; Balakrishnan, P. Transmission line fault detection and classification using discrete wavelet transform and artificial neural network. Middle-East J. Sci. Res. 2016, 24, 1112–1121. [Google Scholar]
- Wang, Z.; Xu, L. Fault Detection of the Power System Based on the Chaotic Neural Network and Wavelet Transform. Complexity 2020, 2020, 8884786. [Google Scholar] [CrossRef]
- Gashteroodkhani, O.A.; Majidi, M.; Etezadi-Amoli, M.; Nematollahi, A.F.; Vahidi, B. A hybrid SVM-TT transform-based method for fault location in hybrid transmission lines with underground cables. Electr. Power Syst. Res. 2019, 170, 205–214. [Google Scholar] [CrossRef]
- Masood, B.; Khan, M.A.; Baig, S.; Song, G.; Rehman, A.U.; Rehman, S.U.; Asif, R.M.; Rasheed, M.B. Investigation of Deterministic, Statistical and Parametric NB-PLC Channel Modeling Techniques for Advanced Metering Infrastructure. Energies 2020, 13, 3098. [Google Scholar] [CrossRef]
- Zhang, S.; Zou, G.; Huang, Q.; Gao, H. A Traveling-Wave-Based Fault Location Scheme for MMC-Based Multi-Terminal DC Grids. Energies 2018, 11, 401. [Google Scholar] [CrossRef]
- Khavari, S.; Dashti, R.; Shaker, H.R.; Santos, A. High impedance fault detection and location in combined overhead line and underground cable distribution networks equipped with data loggers. Energies 2020, 13, 2331. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Work | Key Contribution | Approach | Limitations |
|---|---|---|---|
| [15] | Fault detection. | DWT | There are deficiencies, including complexity and nonflexibility. |
| [16] | Identifies the disturbances and the fault’s occurrence. | CWT | Slow processing. |
| [18,19,43] | Fault detection. | WT, neural network (NN), | No protection zone for relay coordination. |
| [22] | Locates the fault from the base stations in terms of kilometers. | GSM as a communication link in WT technology | The response time is slow. |
| [23] | Fault detection. | Raspberry Pi and Arduino | Less reliable. |
| [25,26] | Observation of short circuits in underground cables. | Murray loop method | Only for short-circuit faults. |
| [27] | Fault detection. | CWT | Only for short-circuit faults. |
| [30] | Fault detection and location. | DWT | No protection zone for relay coordination. |
| [17,32] | Fault detection and location. | Artificial intelligence (AI) | Only identifies the nature of the fault. |
| [33] | Fault detection and relay coordination. | DWT-and-ZigBee model | Less accuracy in fault location. |
| [34,35,36] | Detects phase-to-phase faults. | Lissajous figure | Only detects phase-to-phase faults. |
| [38,39,40] | Fault detection and location. | Wigner distribution function and DWT | No protection zone for relay coordination. |
| [41,42] | Fault detection and optimization of the relay coordination. | DWT | Not suitable in cases of fault occurrence in remote locations. |
| [44,45] | Fault detection and classification. | Using DWT | Only detects and classifies the faults. The fault-location approach is not presented. |
| [46,47] | Fault detection in power system. | Using DWT | No protection zone for relay coordination |
| [48,49] | Fault detection. | Traveling-wave-based fault-location scheme | More suitable for high-impedance faults. |
| Node | Phase 1 | Phase 2 | Phase 3 | |||
|---|---|---|---|---|---|---|
| 9:11 | ||||||
| 50 | 60 | 65 | 70 | 65 | 55 | |
| Node | Balanced | Unbalanced | Balanced | |||
| 3:6 | ||||||
| 1 | 35.1 | 34.2 | 44.1 | 54.1 | 45.1 | 35.1 |
| 2 | 36.6 | 32.4 | 44.4 | 54.4 | 46.4 | 36.6 |
| 3 | 33.8 | 31.8 | 47.4 | 57.4 | 41.4 | 31.3 |
| 4 | 32.9 | 31.1 | 41.3 | 51.3 | 47.3 | 37.7 |
| 5 | 33.3 | 32.2 | 46.6 | 56.6 | 43.6 | 33.1 |
| 6 | 34.5 | 37.5 | 43.8 | 53.8 | 48.8 | 38.2 |
| 7 | 36.6 | 39.6 | 45.3 | 55.3 | 43.3 | 33.8 |
| 8 | 37.5 | 31.4 | 47.5 | 57.5 | 48.5 | 38.3 |
| 9 | 38.6 | 36.4 | 48.6 | 58.6 | 42.6 | 42.6 |
| 10 | 31.1 | 34.1 | 41.7 | 51.7 | 47.7 | 37.8 |
| 11 | 32.0 | 39.4 | 42.8 | 52.8 | 44.8 | 34.6 |
| 12 | 35.9 | 31.6 | 45.6 | 55.6 | 48.6 | 38.2 |
| 13 | 37.7 | 31.1 | 47.6 | 57.6 | 47.6 | 37.1 |
| 14 | 39.8 | 33.3 | 49.4 | 59.4 | 49.4 | 39.9 |
| 15 | 40.1 | 37.6 | 50.5 | 60.5 | 50.5 | 30.0 |
| 16 | 43.3 | 33.8 | 53.3 | 63.6 | 55.8 | 37.8 |
| Parameter | Cable |
|---|---|
| 0.001 Ω/km | |
| 0.087 Ω/km | |
| 2.13 × 10−5 H/km | |
| 0.0003 H/km | |
| 7.22 × 10−6 F/km | |
| 10−6 F/km |
| Overcurrent-Relay Functional Time (s) | ||||||
|---|---|---|---|---|---|---|
| Fault Location | Relay 1 | Relay 2 | Relay 3 | Relay 4 | Relay 5 | Relay to Be Operated |
| 9-8 | 0.09 | 0.06 | 0.03 | — | — | R3 |
| 10-G | 0.06 | — | 0.03 | — | R4 | |
| 11-12 | 0.09 | — | 0.03 | 0.06 | R4 | |
| 3-4 | 0.06 | 0.03 | — | — | — | R2 |
| 6-G | 0.09 | 0.06 | 0.03 | R3 | ||
| Fault Type | Fault Section | Actual FL (km) | FR |
|---|---|---|---|
| Balanced Load | |||
| L-L | 9-8 | 8 | 88 |
| L-G | 10-G | 4 | 45 |
| L-L | 11-12 | 6 | 65 |
| L-L | 3-4 | 7 | 76 |
| L-G | 6-G | 7.5 | 83 |
| Unbalanced Load | |||
| AB | 9-8 | 8 | 48 |
| ABCG | 10-G | 4 | 24 |
| AG | 11-12 | 6 | 30 |
| ABG | 3-4 | 7 | 38 |
| CG | 6-G | 7.5 | 42 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tariq, R.; Alhamrouni, I.; Rehman, A.U.; Tag Eldin, E.; Shafiq, M.; Ghamry, N.A.; Hamam, H. An Optimized Solution for Fault Detection and Location in Underground Cables Based on Traveling Waves. Energies 2022, 15, 6468. https://doi.org/10.3390/en15176468
Tariq R, Alhamrouni I, Rehman AU, Tag Eldin E, Shafiq M, Ghamry NA, Hamam H. An Optimized Solution for Fault Detection and Location in Underground Cables Based on Traveling Waves. Energies. 2022; 15(17):6468. https://doi.org/10.3390/en15176468
Chicago/Turabian StyleTariq, Rizwan, Ibrahim Alhamrouni, Ateeq Ur Rehman, Elsayed Tag Eldin, Muhammad Shafiq, Nivin A. Ghamry, and Habib Hamam. 2022. "An Optimized Solution for Fault Detection and Location in Underground Cables Based on Traveling Waves" Energies 15, no. 17: 6468. https://doi.org/10.3390/en15176468
APA StyleTariq, R., Alhamrouni, I., Rehman, A. U., Tag Eldin, E., Shafiq, M., Ghamry, N. A., & Hamam, H. (2022). An Optimized Solution for Fault Detection and Location in Underground Cables Based on Traveling Waves. Energies, 15(17), 6468. https://doi.org/10.3390/en15176468