
A Proposed Three-Phase Induction Motor Drive System Suitable for Golf Cars

 ,
,
Abstract
:1. Introduction
- When one phase of the motor is lost due to an open circuit or other causes, the motor does not have the capability to start when the car starts from rest. This comes as the generated electric field under this condition is not a rotating field. Therefore, the generated torque is equal to zero and the car needs to be carried to perform the required maintenance. This problem reduces the car’s reliability; therefore, this issue needs to be solved.
- The adopted braking system of the conventional golf car depends on a mechanical braking system that suffers from the high need for maintenance. This represents another cause for reliability reduction. Therefore, a solution to this problem should be presented.
- In the conventional golf car, if a failure occurs in some batteries at the same time, the driving motor gives a reduced torque and the car may not be able to be driven at the desired speeds. Therefore, there is a need for an improved drive system to overcome this problem.
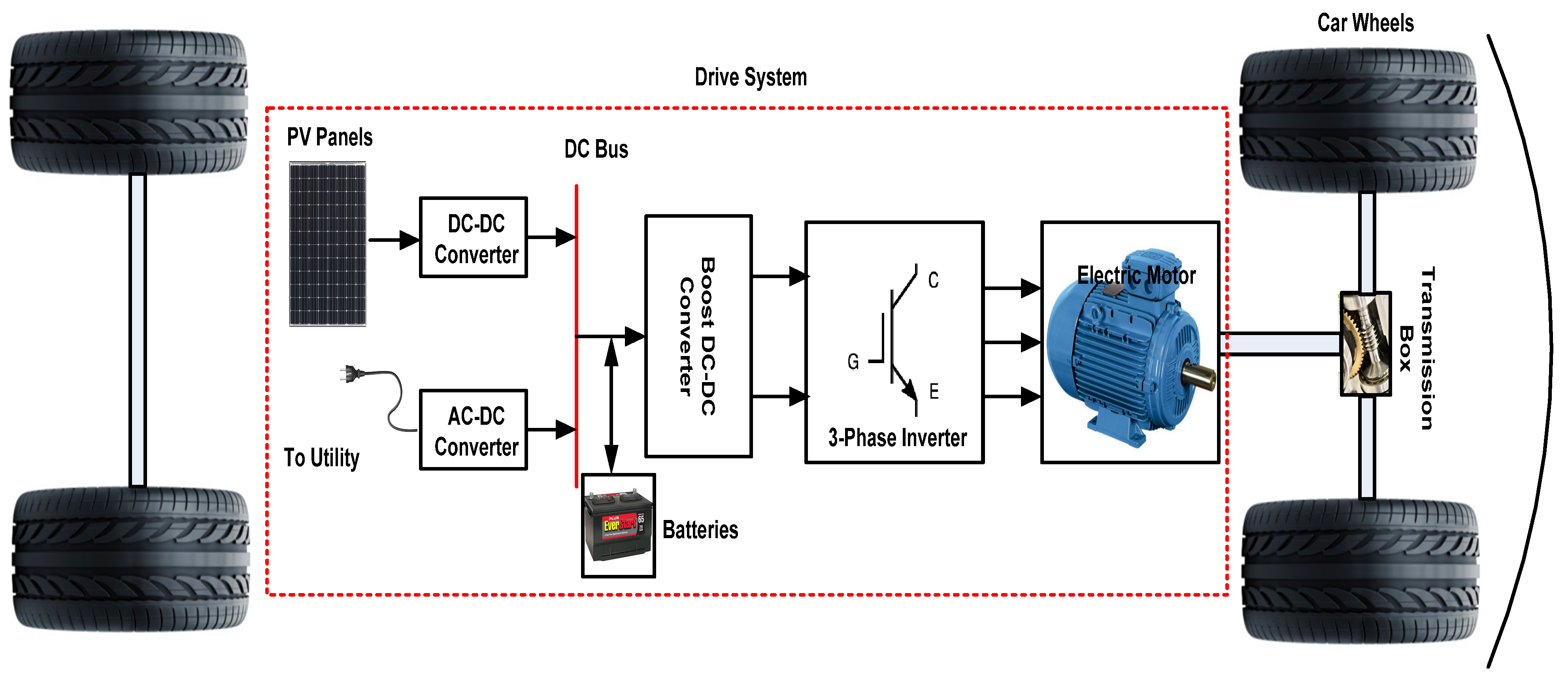
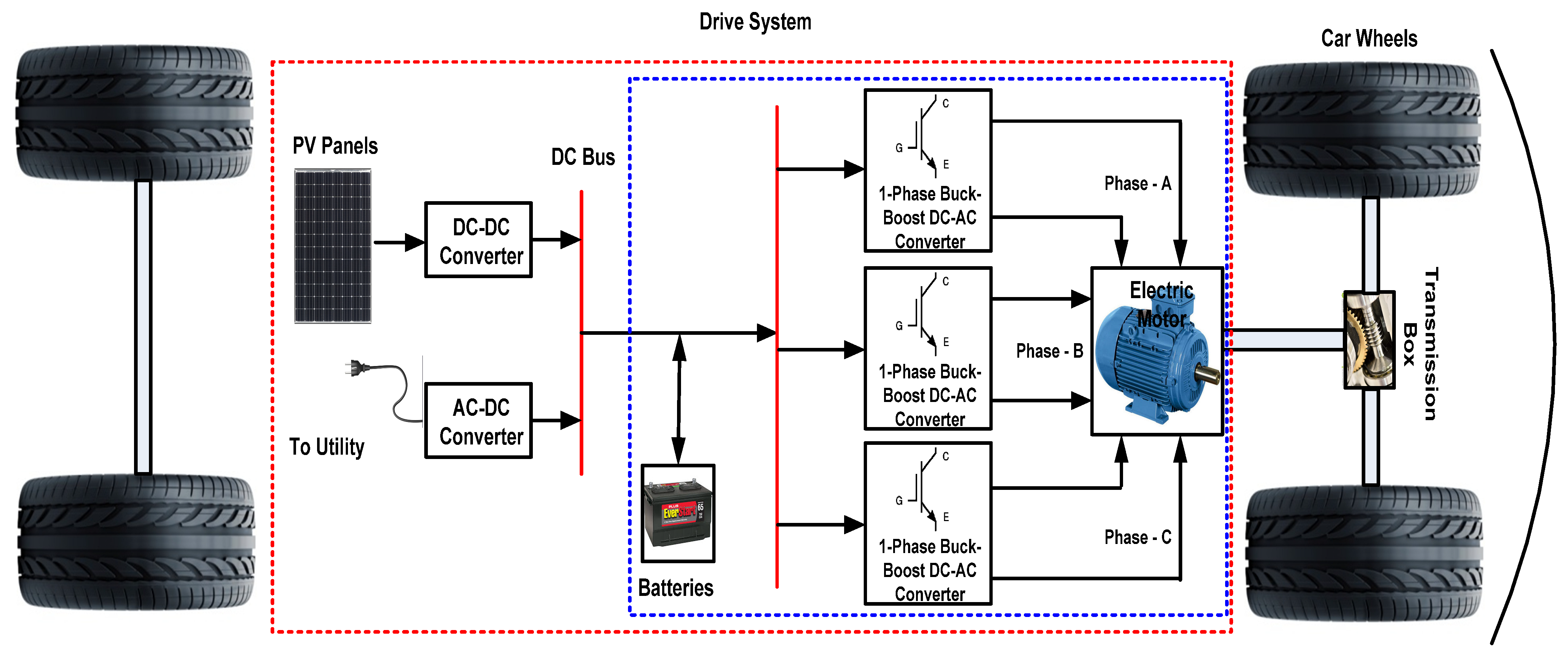
2. The Proposed Golf Car Drive System
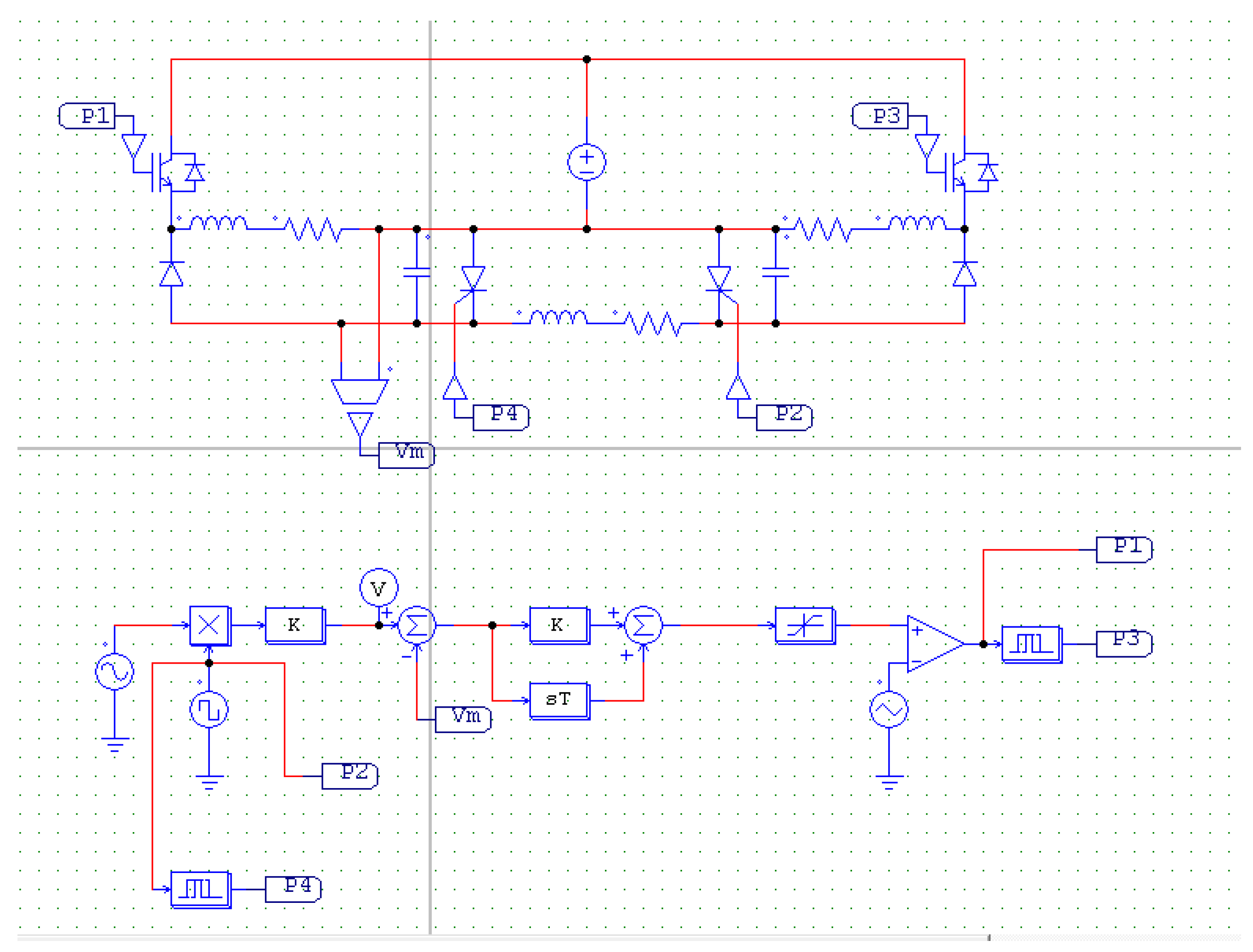
- The boost DC–DC converter which feeds the three-phase inverter, as well as the three-phase inverter itself in the conventional drive system, are replaced with a single-stage buck–boost DC–AC converter.
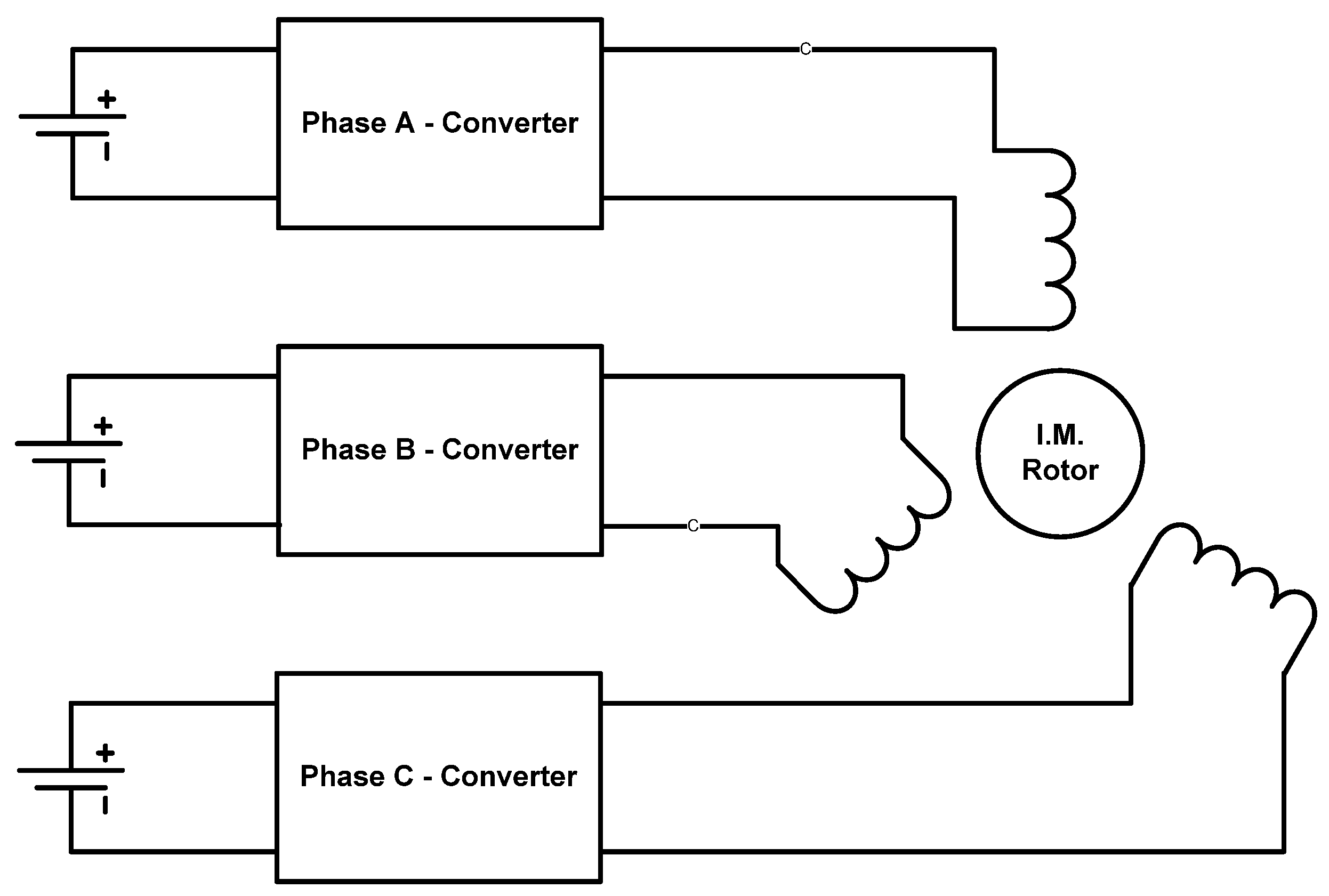
- Three single-phase DC–AC buck–boost converters are used. Each converter is used to feed only one phase from the phases of the three-phase induction motor used to drive the car. Therefore, the six terminals of the three-phase induction motor are needed in the connection, as shown schematically in Figure 4.
- The used storage batteries are divided to three groups with equal numbers of batteries. The first group is connected at the input of the DC–AC converter, and its output is connected to phase-A of the induction motor. However, the other two groups are connected to the inputs of the converters of the other phases; see Figure 4.
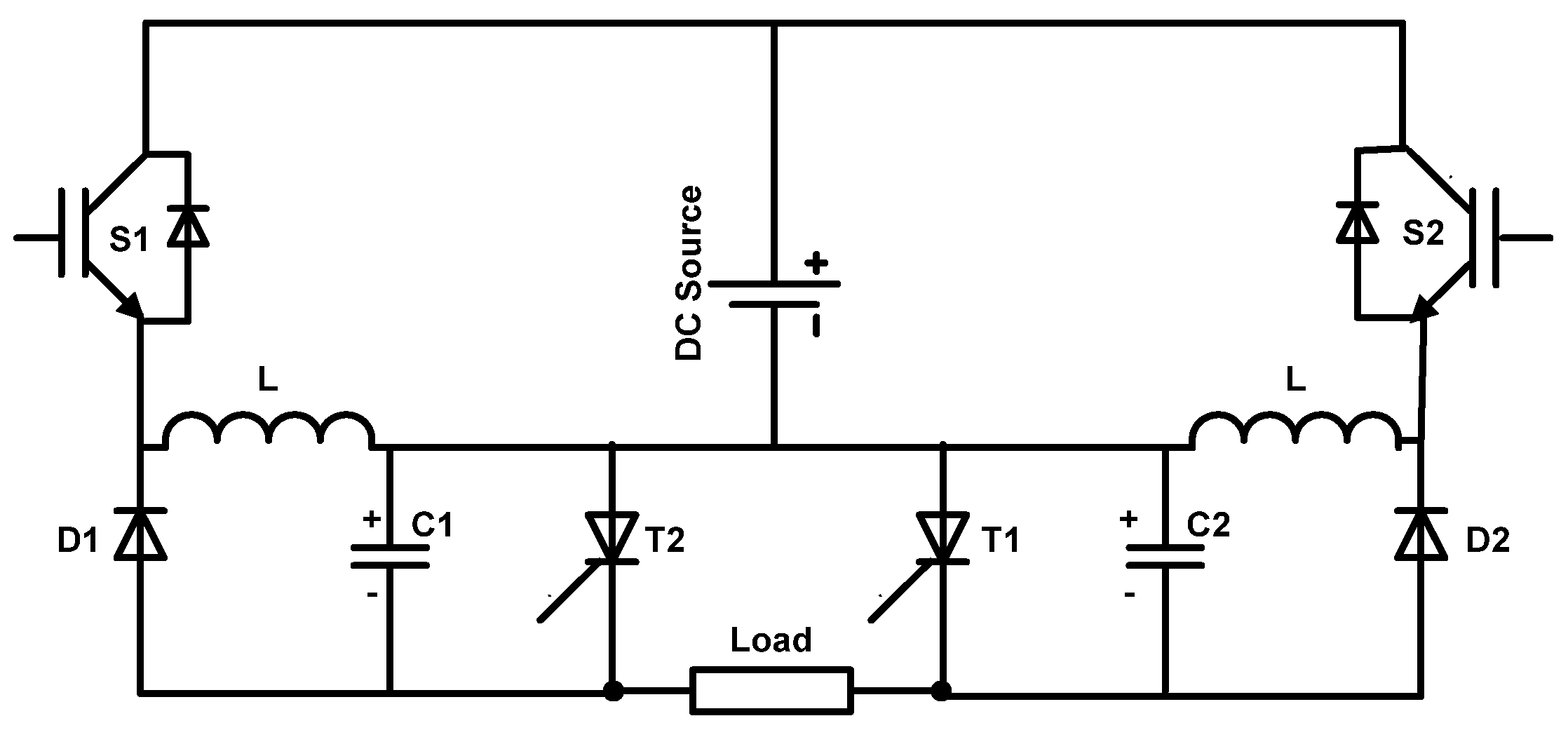
- The main advantage of the adopted DC–AC buck–boost converter comes as its output can be controlled to be either +ve or −ve DC. Therefore, it is suggested to use this feature to provide braking to the car driving motor instead of the conventional mechanical braking.
3. Simulation Study and Results
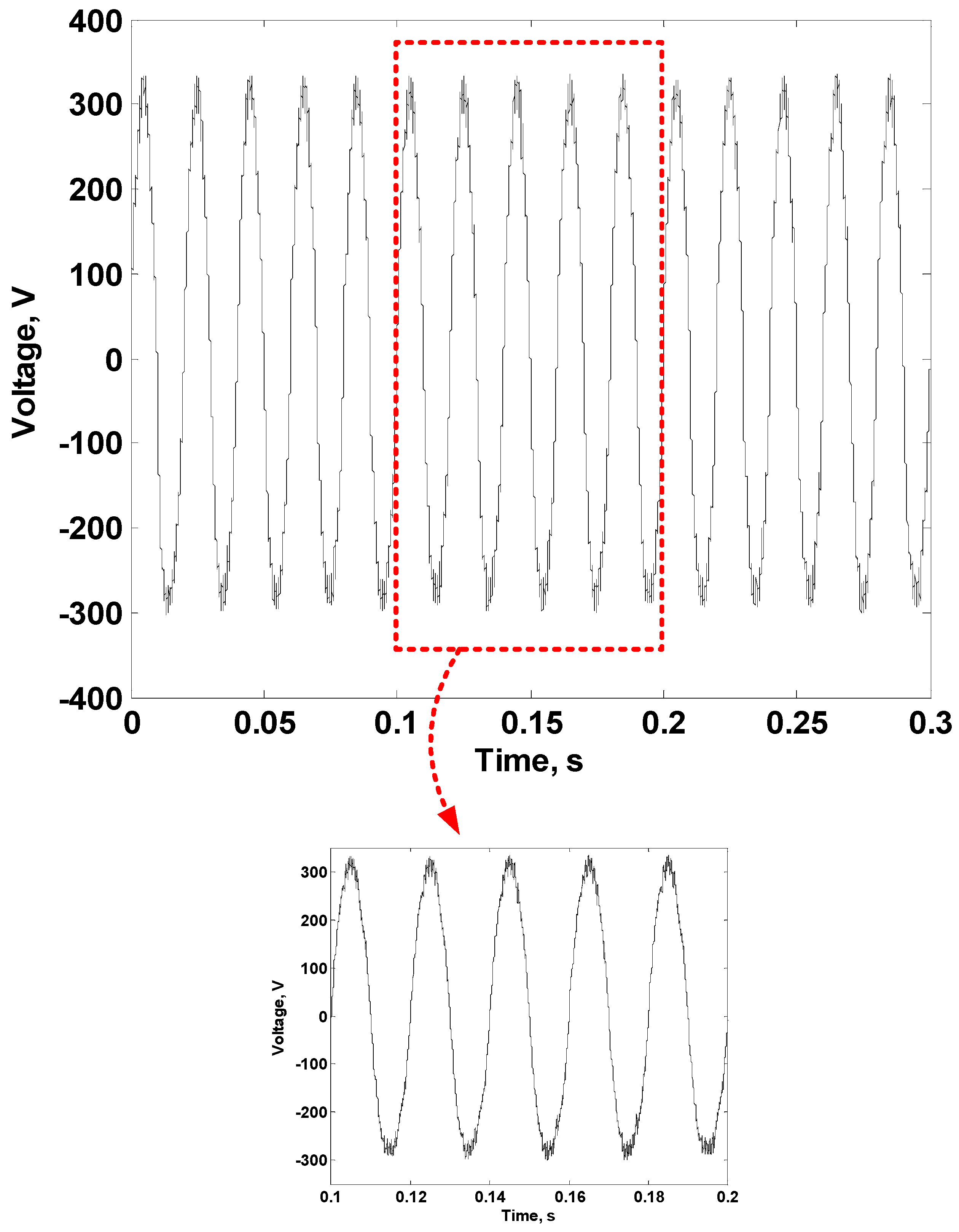
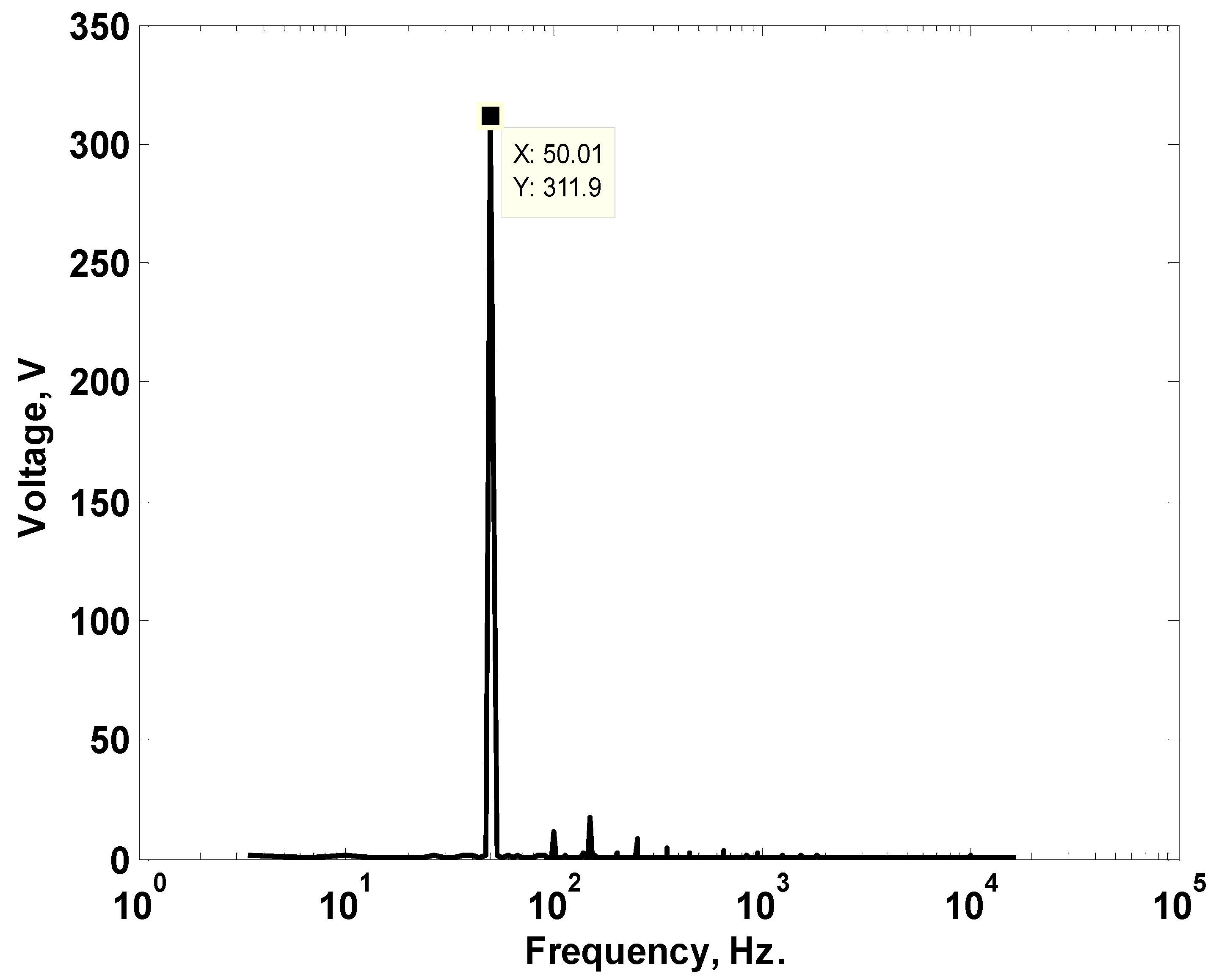
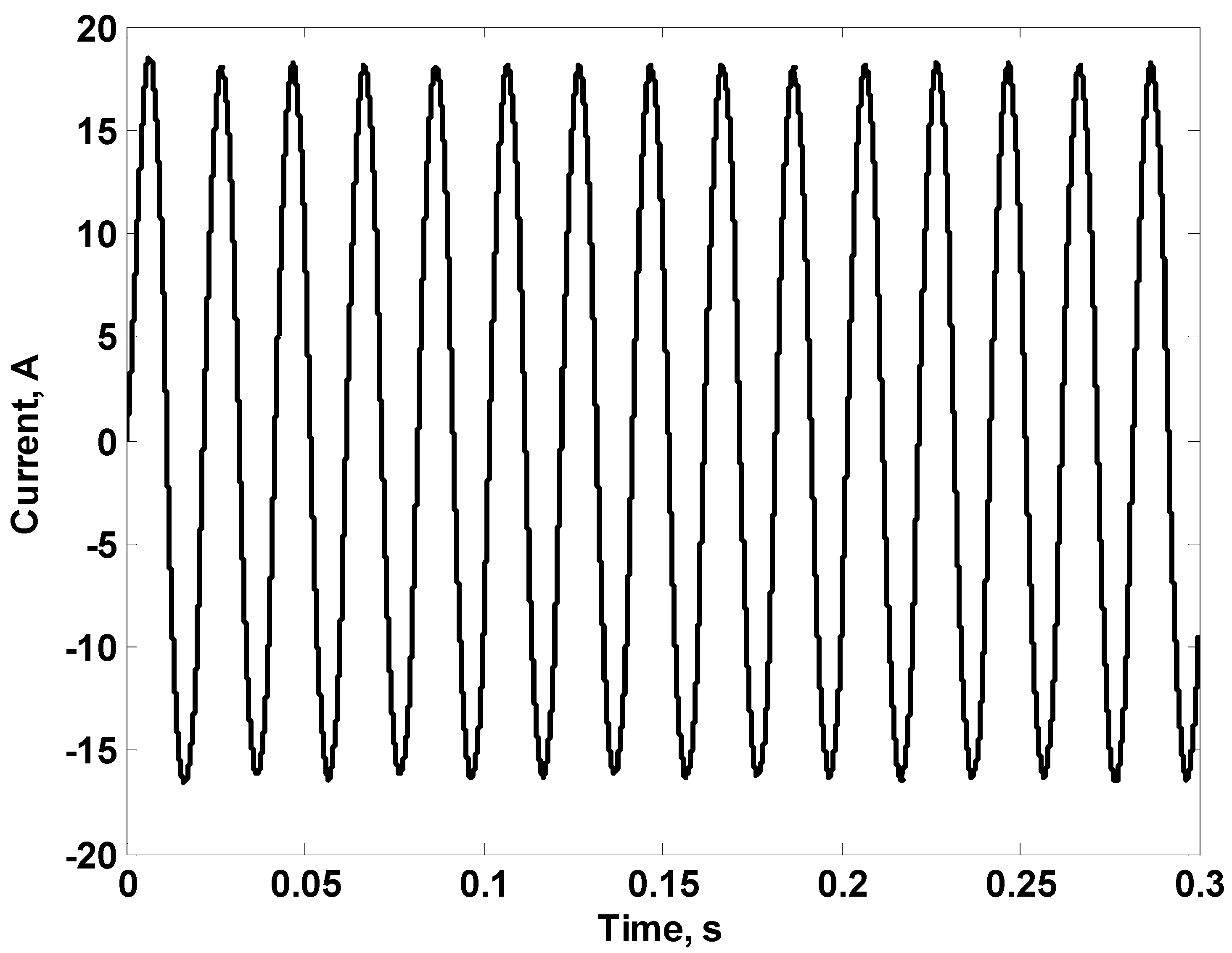
- Studying the capability of the adopted converter to give sinusoidal variable voltages with variable frequencies.
- Studying the capability of the converter to give +ve as well as −ve DC voltages at its output terminals.
- Using three suggested single-phase converters to drive a three-phase induction motor.
- Studying the performance of the three-phase system with partial damage (part in one battery or some complete batteries) in the storage batteries as well as the occurrence of a fault in one phase of the induction motor phases.
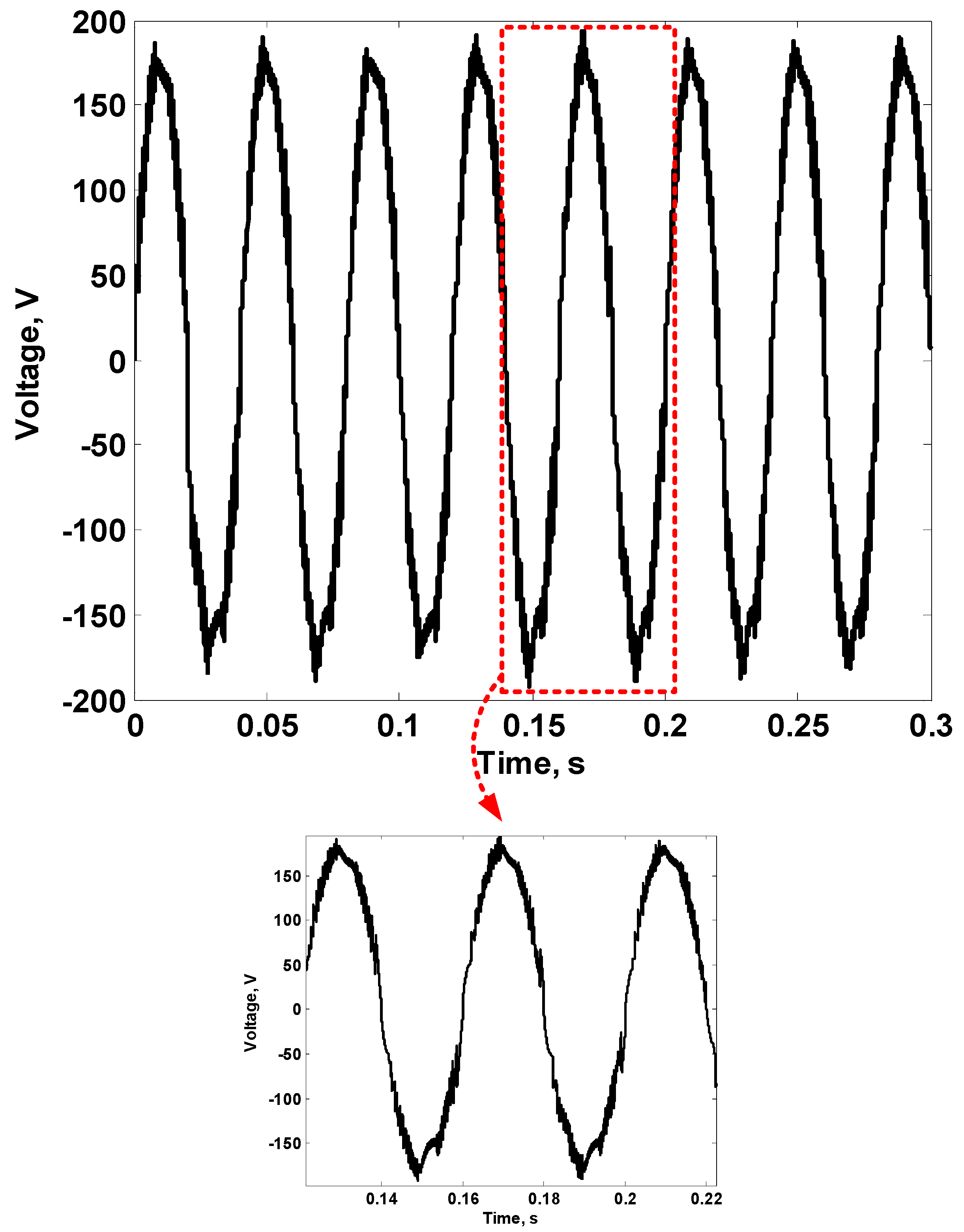
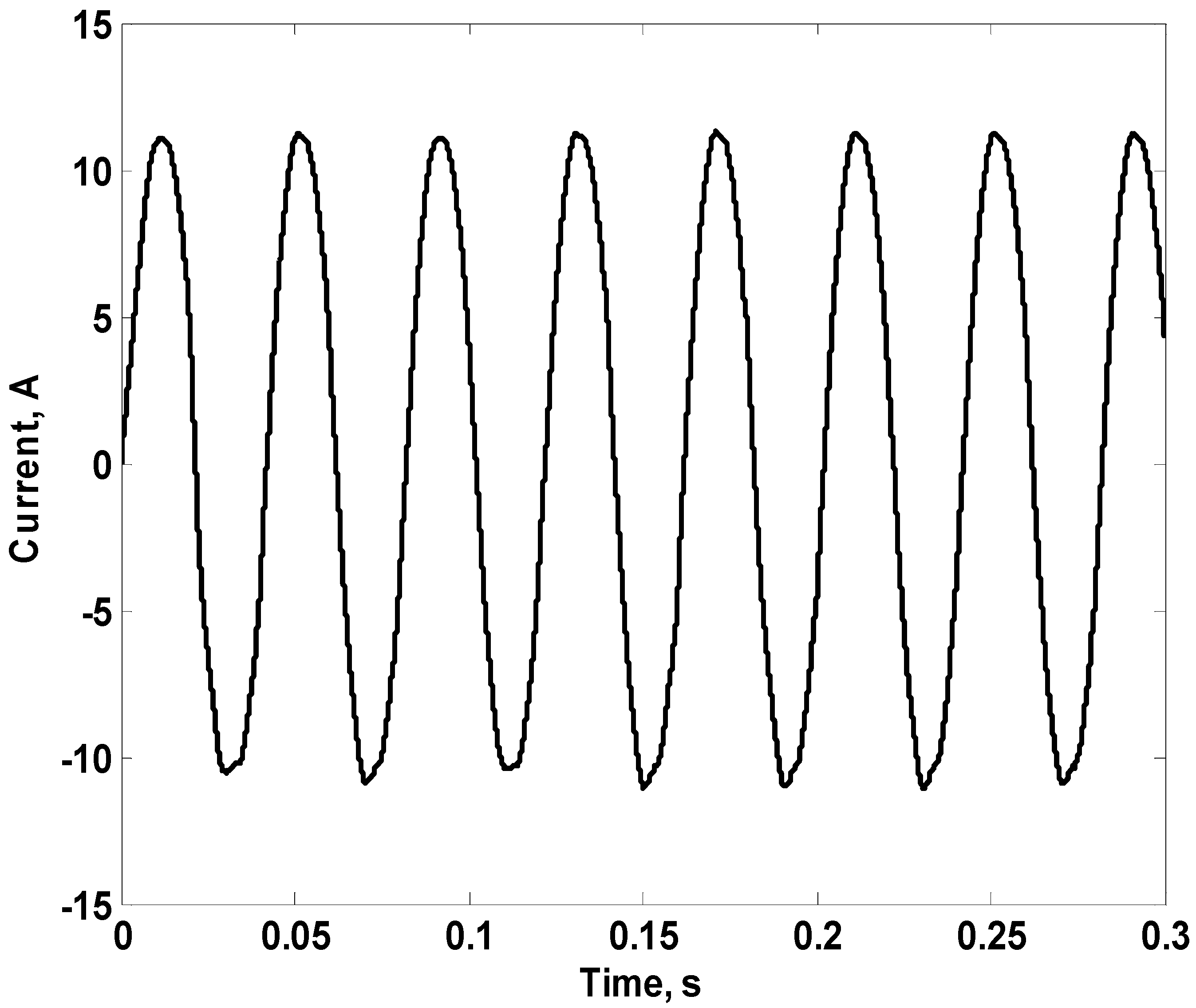
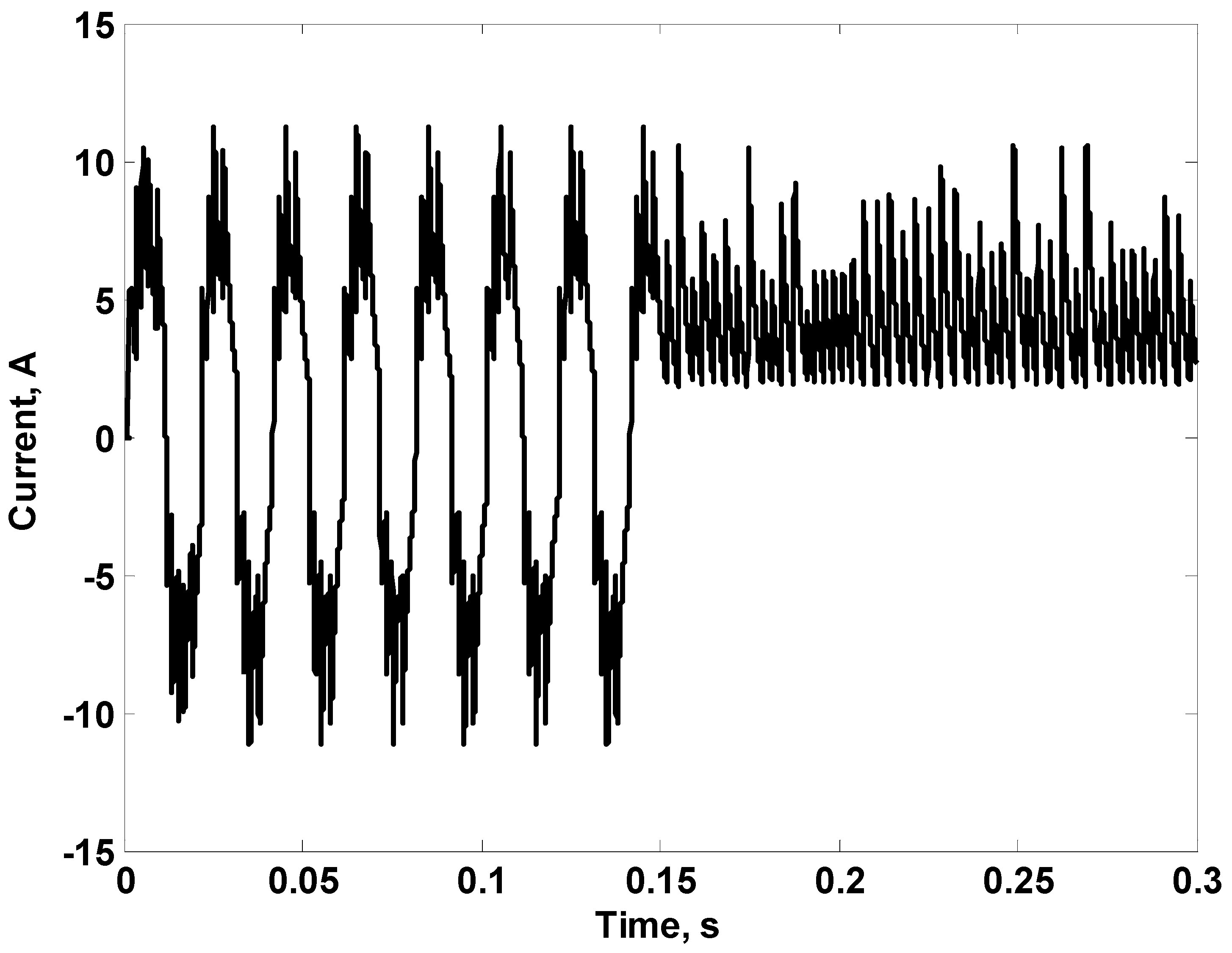
3.1. The Capability of the Converter to Give Siusoidal Voltages with Variable Amplitudes and Frequencies
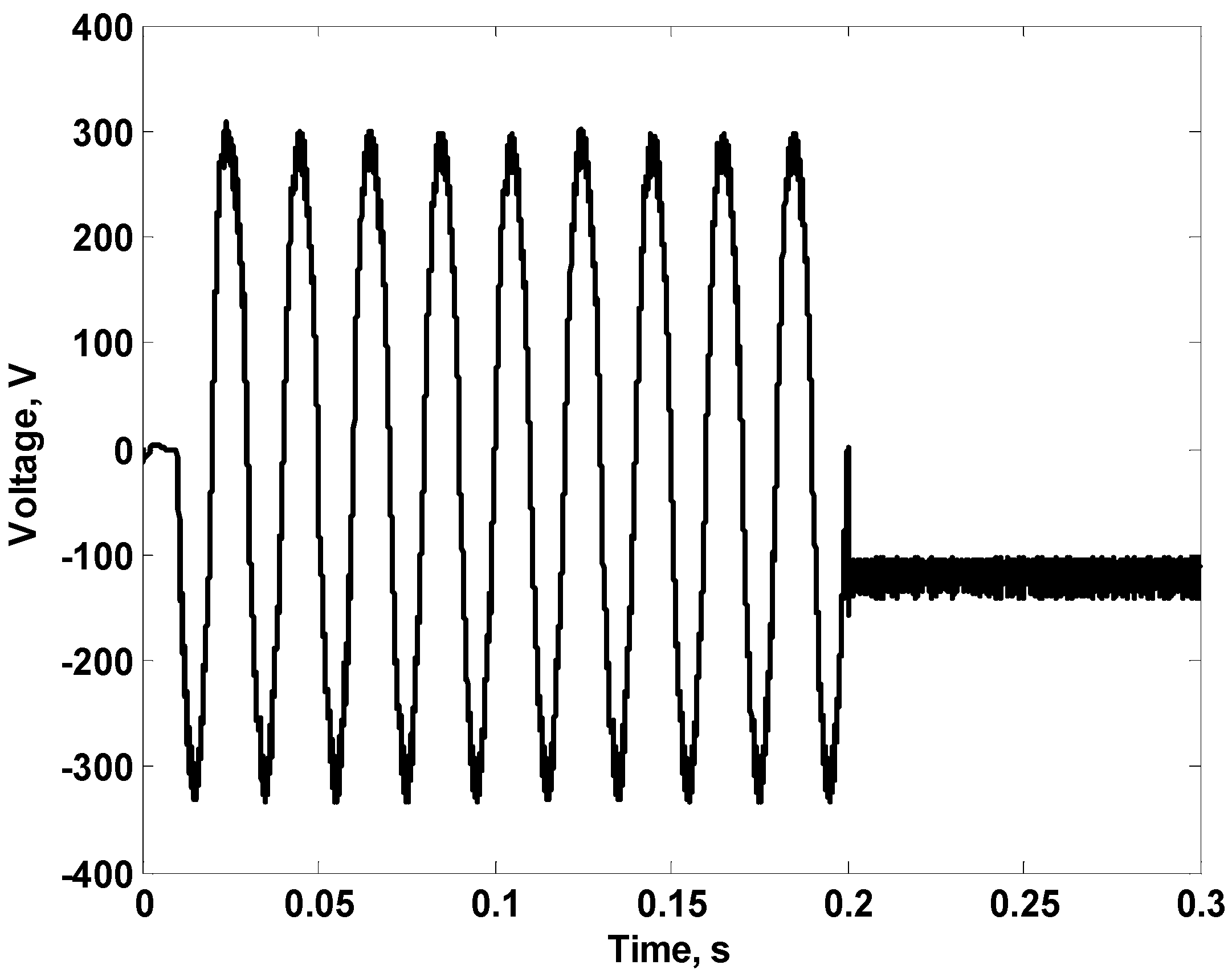
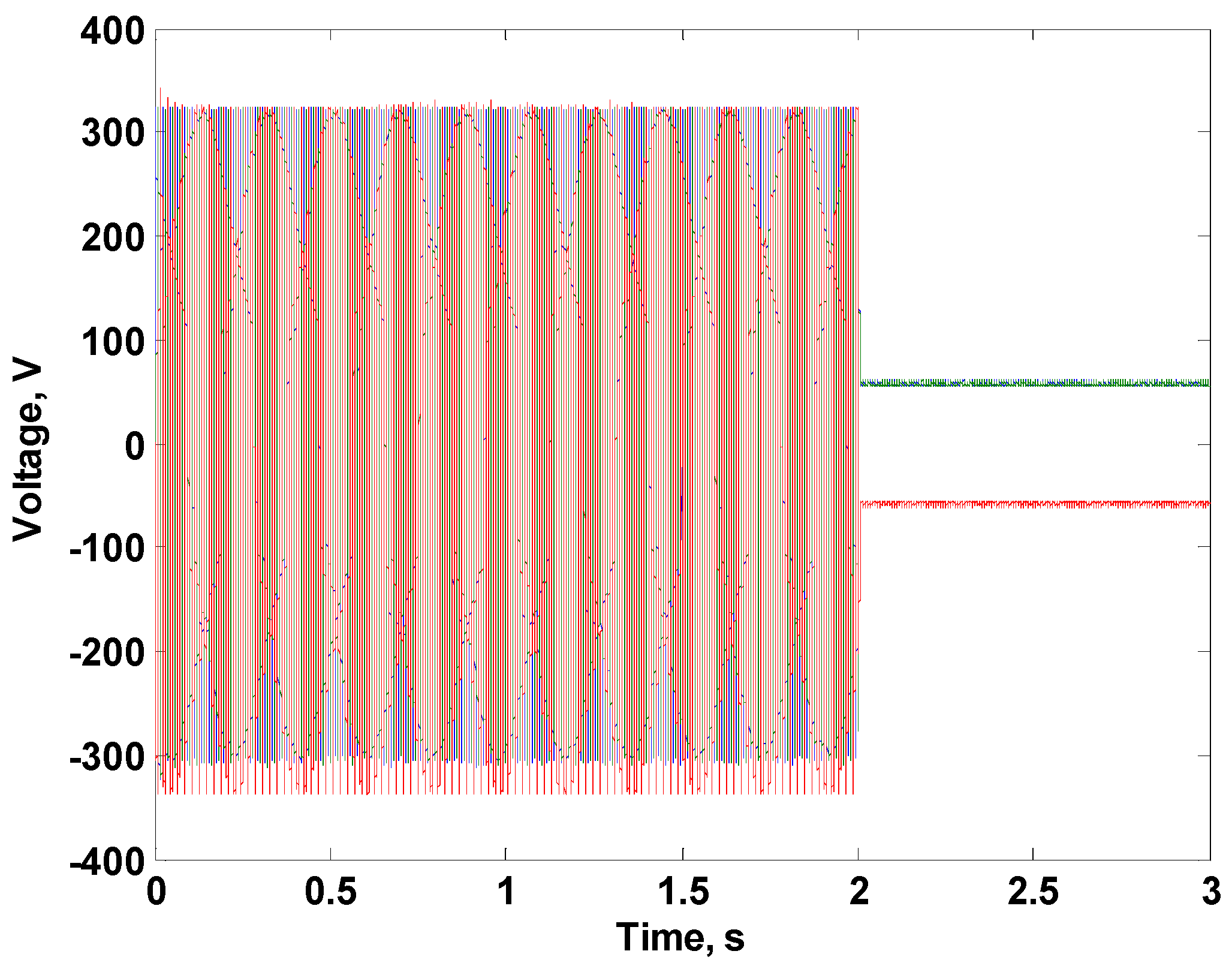
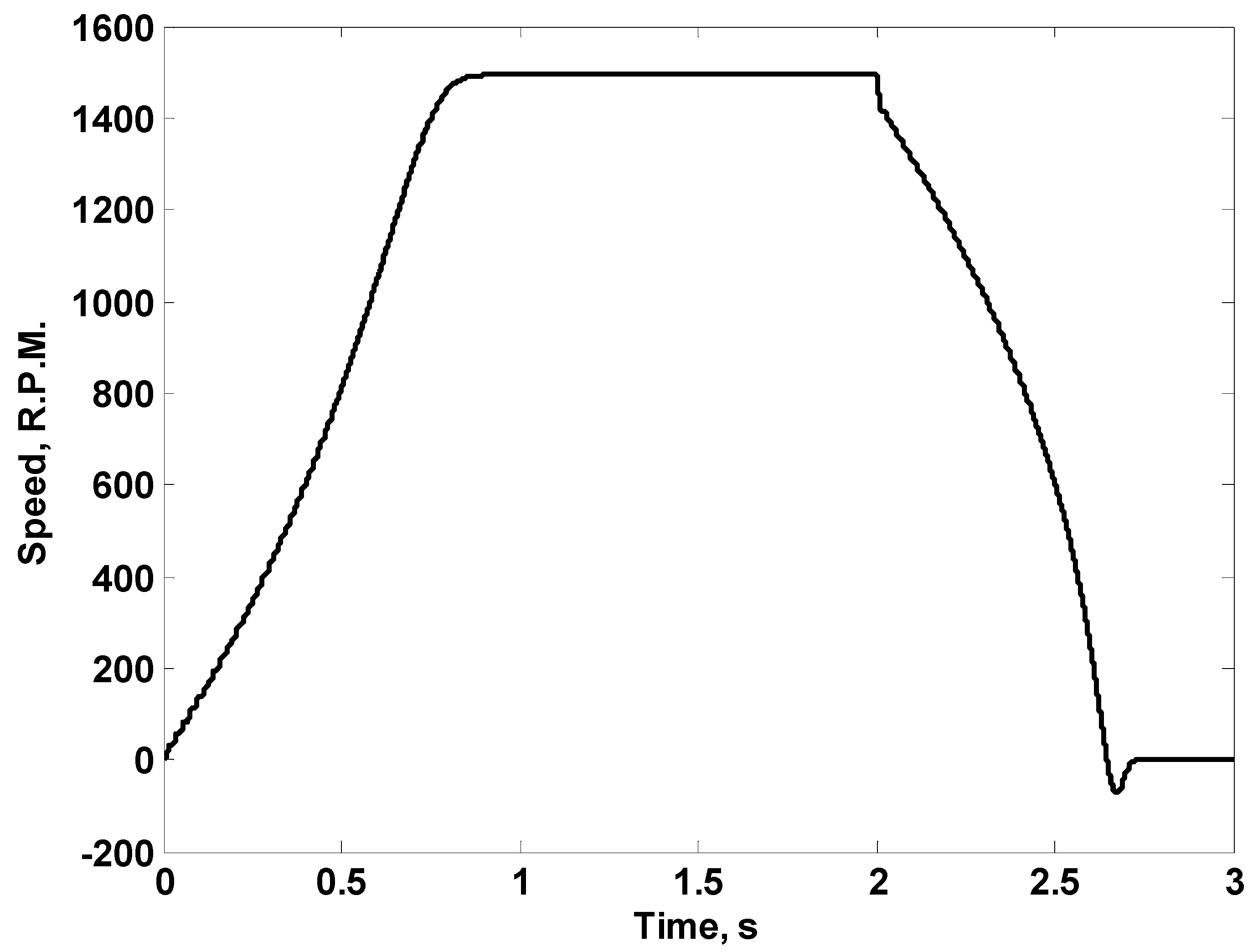
3.2. The Capability of the Converter to Give +ve and −ve DC Voltages at Its Output
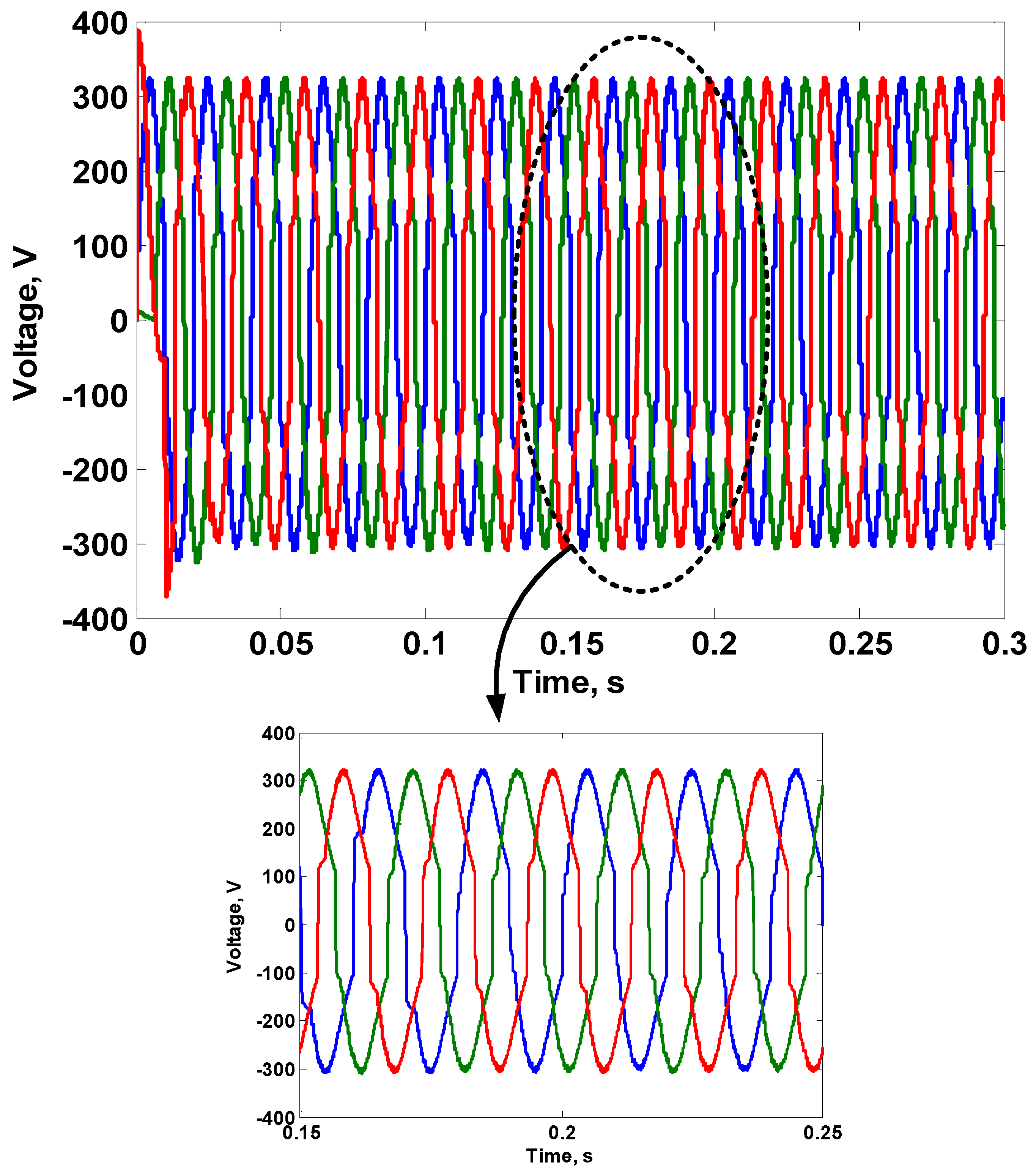
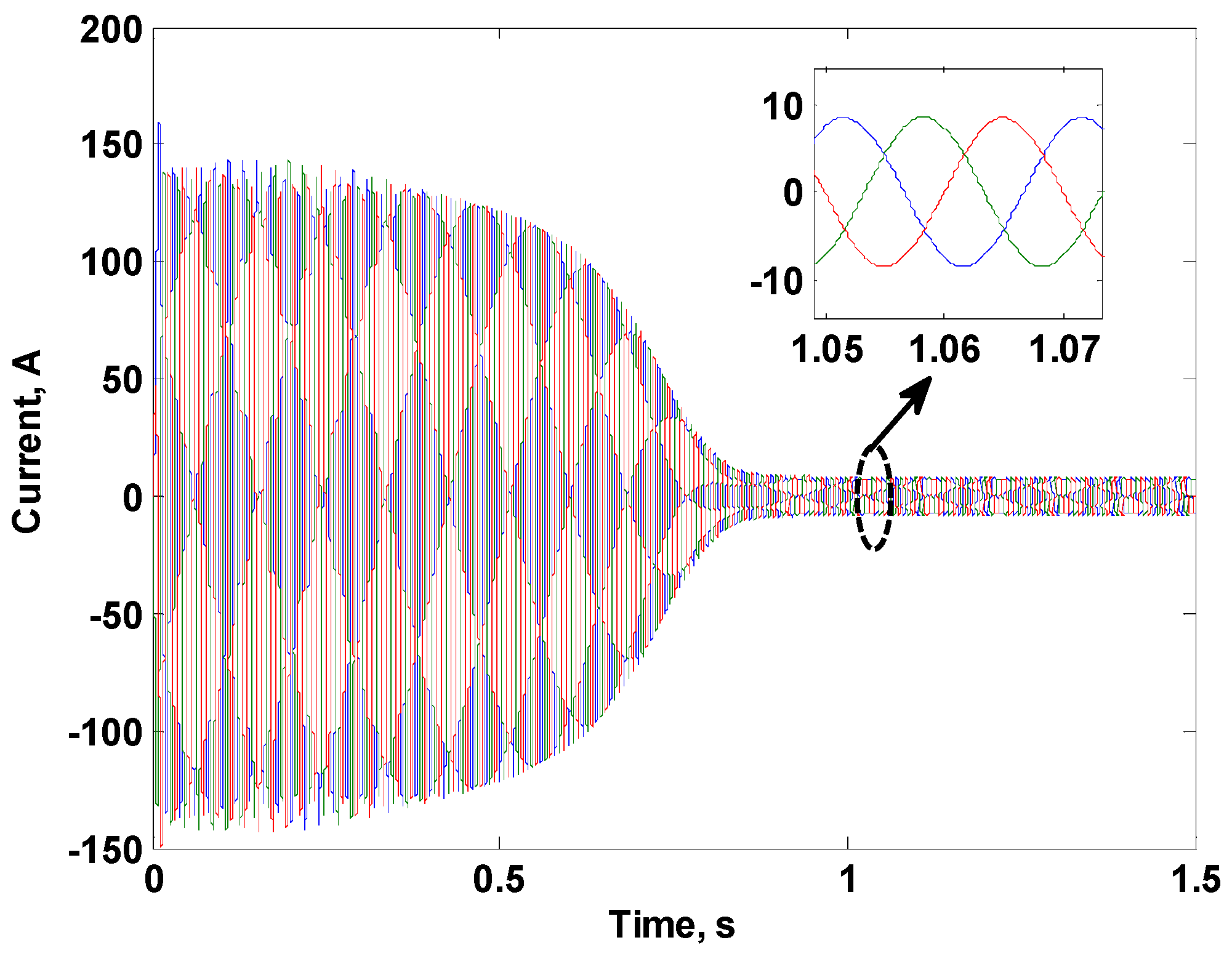
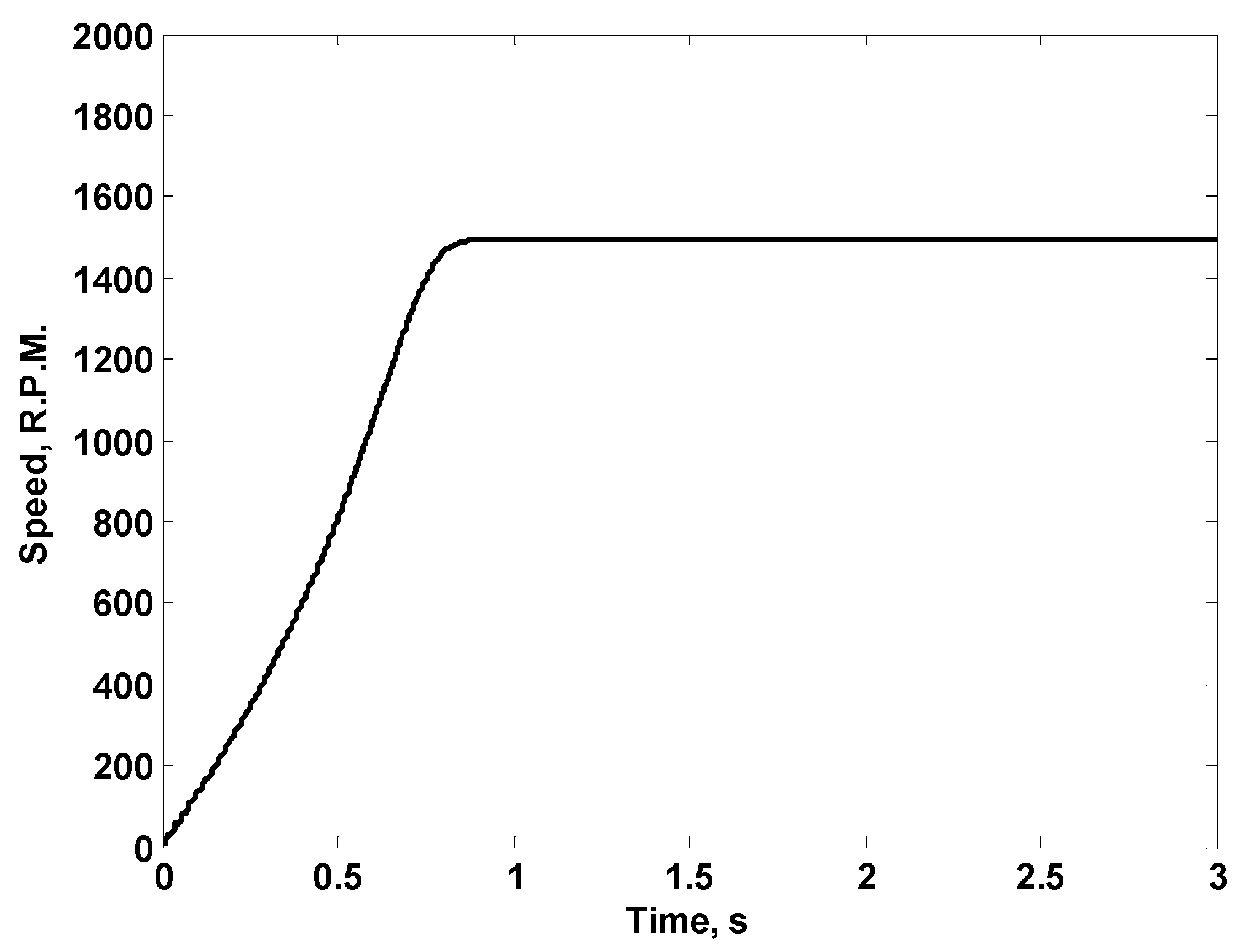
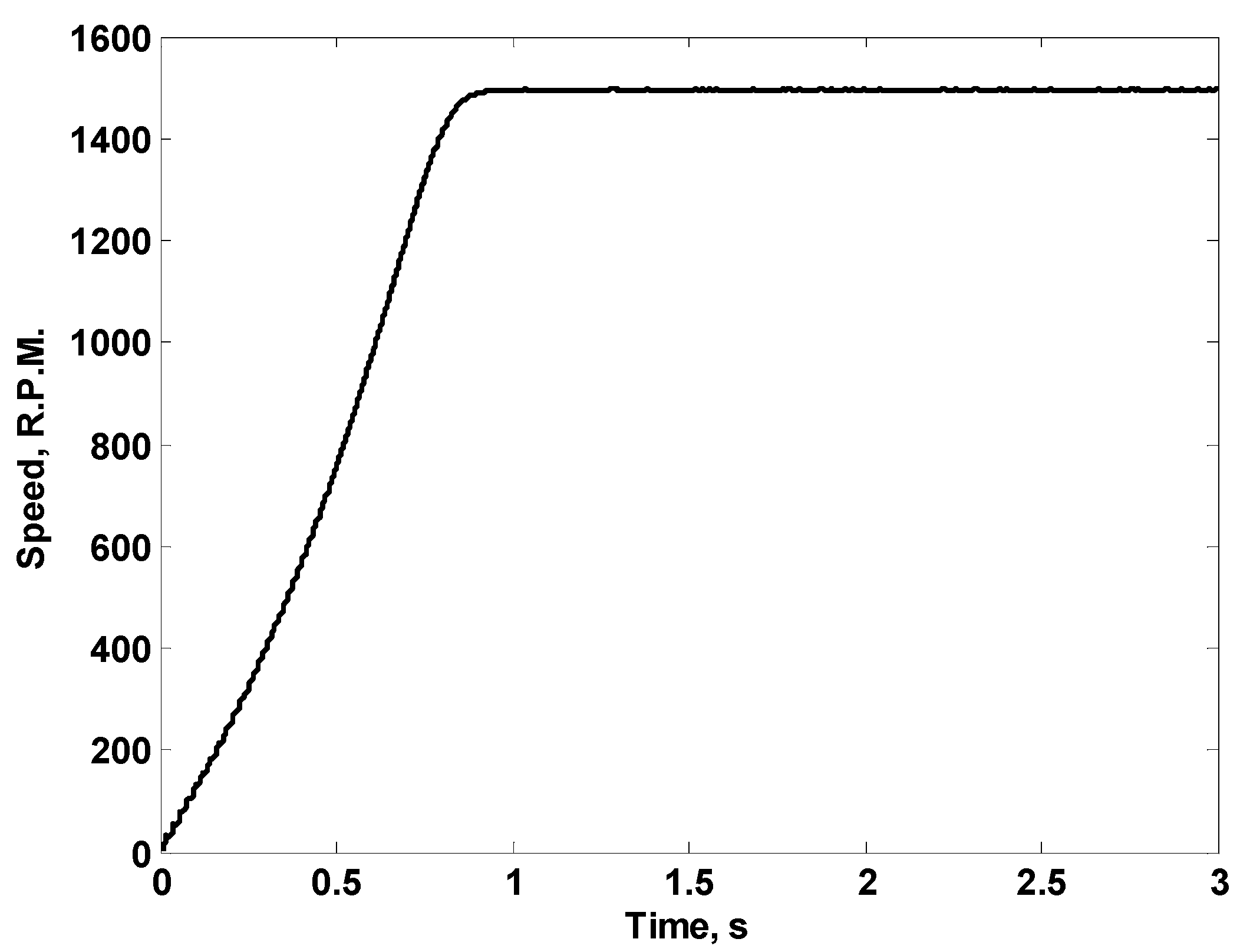
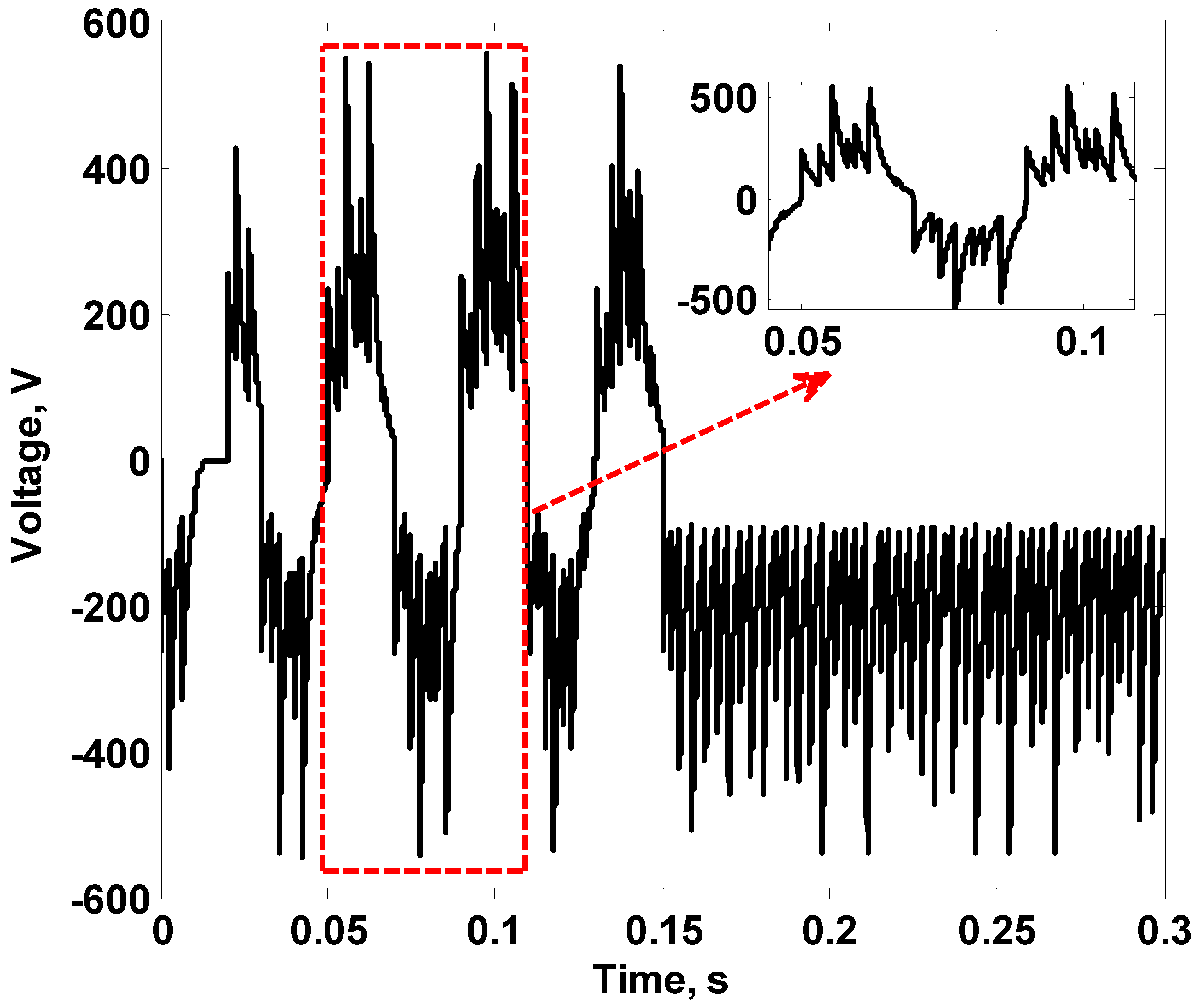
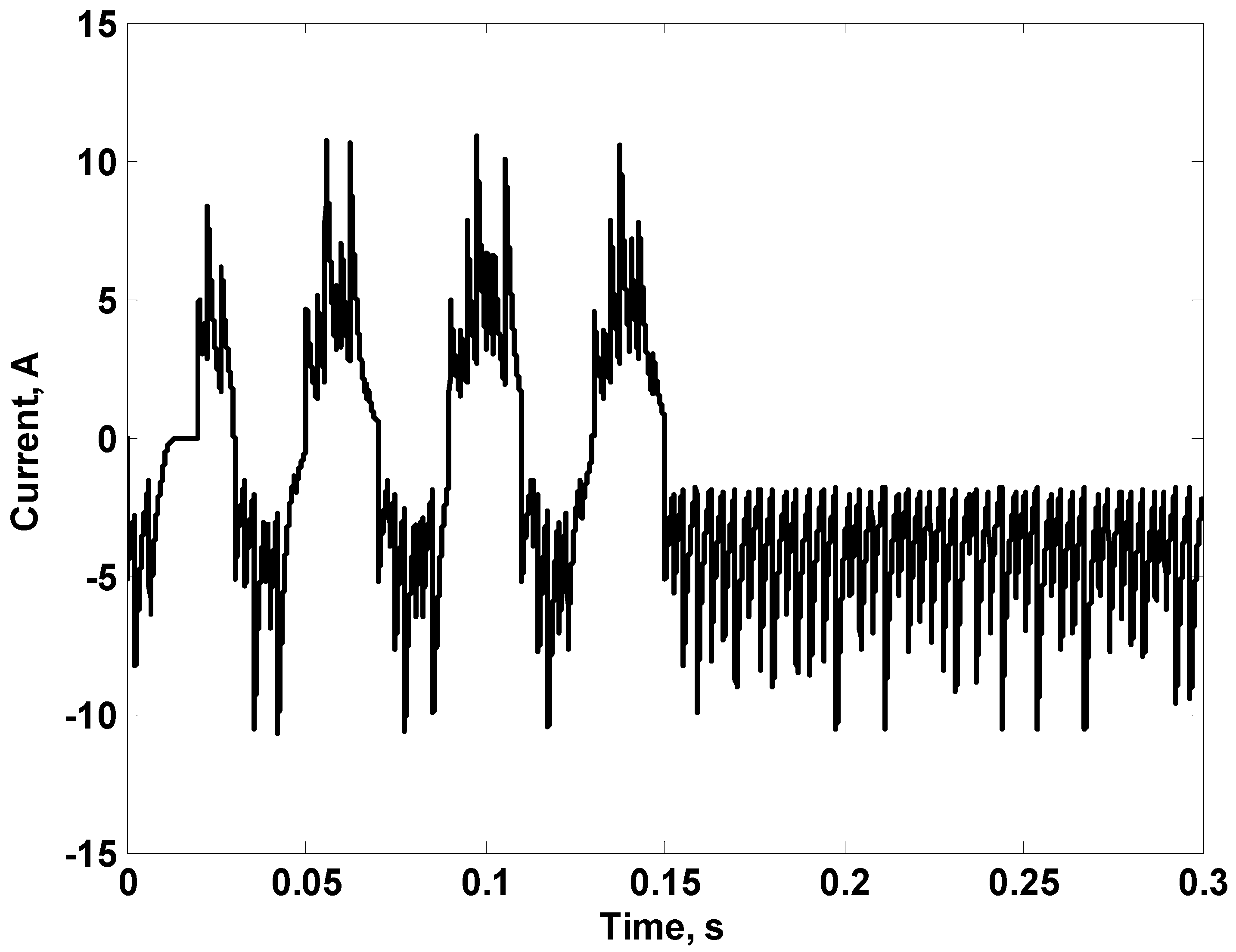
3.3. Three Single-Phase Converters to Drive a Three-Phase Motor
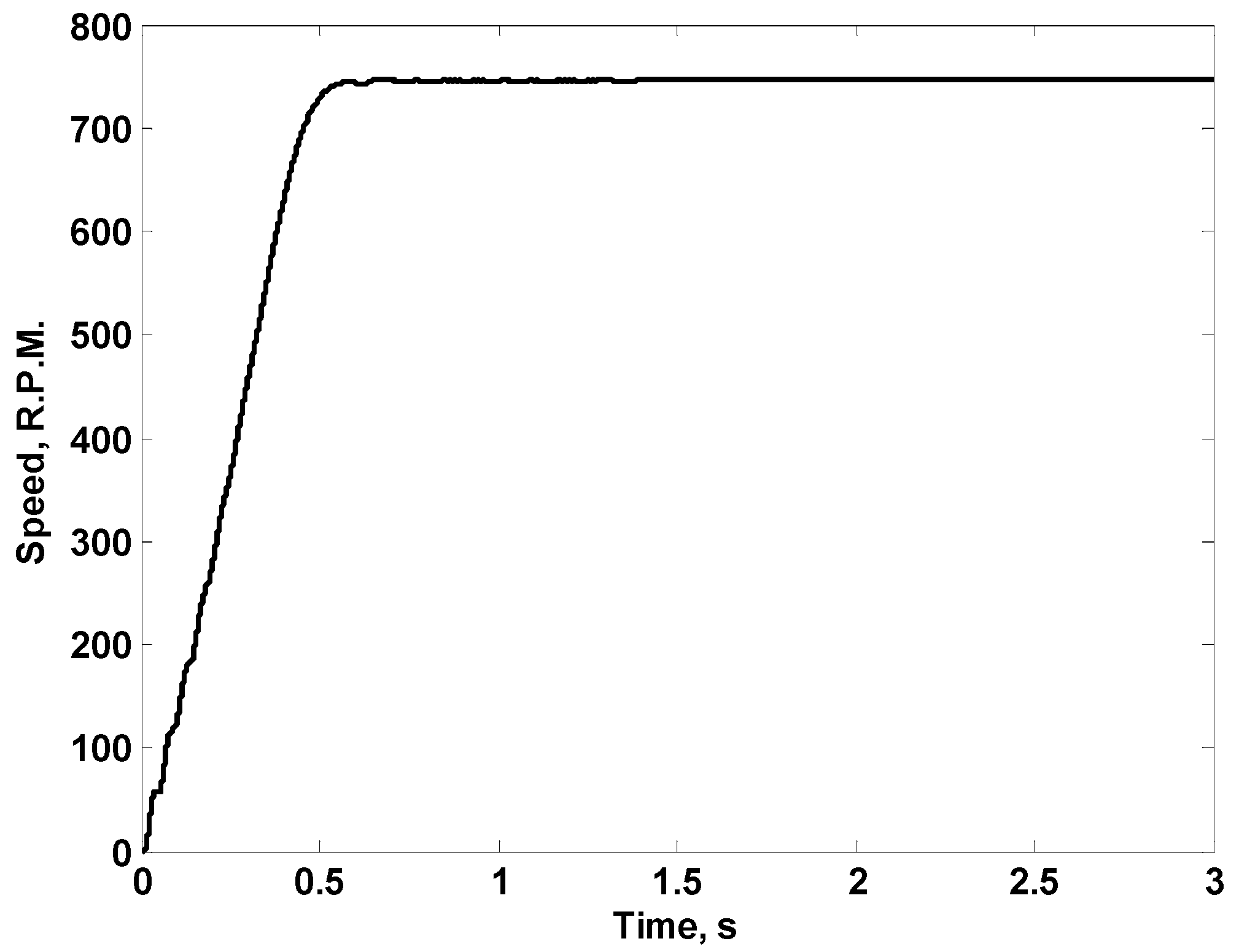
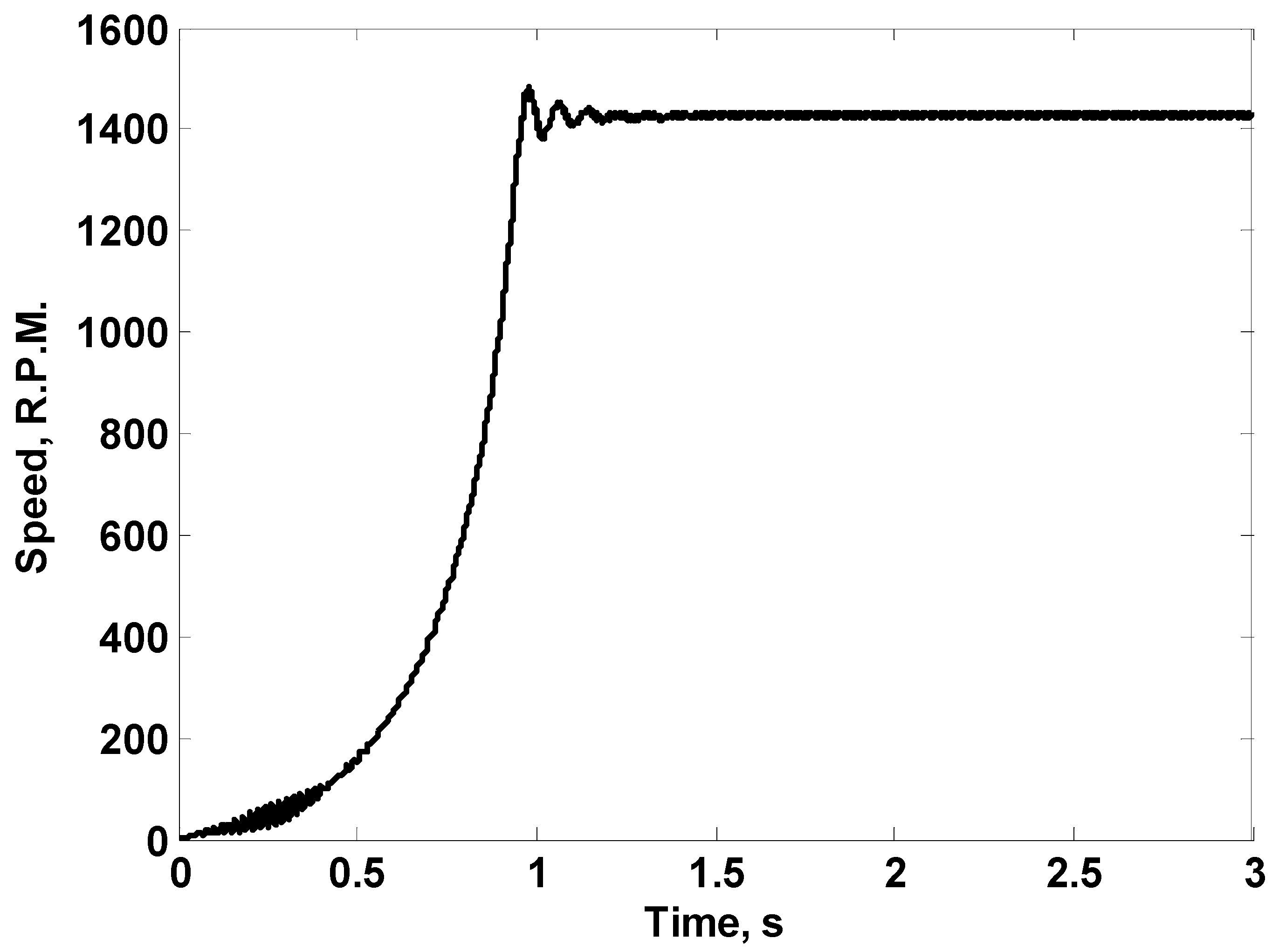
3.4. Performance of the Three-Phase System with Partial Damage in the Storage Batteries or Fault Occurrence in One Phase of the Motor
4. Experimental Results
5. Conclusions
- The suggested system has the advantage of high reliability, as it can deal with different fault conditions such as battery and motor winding faults.
- The suggested electric drive system depends on a buck–boost converter which has the ability to give variable voltages as well as variable frequencies.
- Variable speeds of the electric vehicles can be easily achieved due to the ability of the adopted converter to give variable voltages at variable frequencies.
- The adopted converter can give a variable DC voltage (positive or negative) at its output. This DC voltage can be used to achieve braking of the induction motor used in the electric vehicle to avoid the use of ordinary mechanical braking, increasing the vehicle’s reliability.
Author Contributions
Funding
Conflicts of Interest
References
- Sanguesa, J.A.; Torres-Sanz, V.; Garrido, P.; Martinez, F.J.; Marquez-Barja, J.M. A Review on Electric Vehicles: Technologies and Challenges. Smart Cities 2021, 4, 372–404. [Google Scholar] [CrossRef]
- Hawkins, T.R.; Gausen, O.M.; Strømman, A.H. Environmental impacts of hybrid and electric vehicles—A review. Int. J. Life Cycle Assess. 2012, 17, 997–1014. [Google Scholar] [CrossRef]
- Vasant, P.; Marmolejo, J.A.; Litvinchev, I.; Aguilar, R.R. Nature-inspired meta-heuristics approaches for charging plug-in hybrid electric vehicle. Wirel. Netw. 2019, 26, 4753–4766. [Google Scholar] [CrossRef]
- European Commission. Transport in Figures’—Statistical Pocketbook. 2011. Available online: https://ec.europa.eu/transport/facts-fundings/statistics/pocketbook-2011_en/ (accessed on 21 February 2021).
- Chan, C.C. The State of the Art of Electric, Hybrid, and Fuel Cell Vehicles. Proc. IEEE 2007, 95, 704–718. [Google Scholar] [CrossRef]
- Albatayneh, A.; Assaf, M.N.; Alterman, D.; Jaradat, M. Comparison of the Overall Energy Efficiency for Internal Combustion Engine Vehicles and Electric Vehicles. Environ. Clim. Technol. 2020, 24, 669–680. [Google Scholar] [CrossRef]
- Yong, J.Y.; Ramachandaramurthy, V.K.; Tan, K.M.; Mithulananthan, N. A review on the state-of-the-art technologies of electric vehicle, its impacts and prospects. Renew. Sustain. Energy Rev. 2015, 49, 365–385. [Google Scholar] [CrossRef]
- Thiel, C.; Perujo, A.; Mercier, A. Cost and CO2 aspects of future vehicle options in Europe under new energy policy scenarios. Energy Policy 2010, 38, 7142–7151. [Google Scholar] [CrossRef]
- Richardson, D.B. Electric vehicles and the electric grid: A review of modeling approaches, Impacts, and renewable energy integration. Renew. Sustain. Energy Rev. 2013, 19, 247–254. [Google Scholar] [CrossRef]
- Habib, S.; Kamran, M.; Rashid, U. Impact analysis of vehicle-to-grid technology and charging strategies of electric vehicles on distribution networks—A review. J. Power Sources 2015, 277, 205–214. [Google Scholar] [CrossRef]
- Shuai, W.; Maille, P.; Pelov, A. Charging Electric Vehicles in the Smart City: A Survey of Economy-Driven Approaches. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2089–2106. [Google Scholar] [CrossRef] [Green Version]
- Tan, K.M.; Ramachandaramurthy, V.K.; Yong, J.Y. Integration of electric vehicles in smart grid: A review on vehicle to grid technologies and optimization techniques. Renew. Sustain. Energy Rev. 2016, 53, 720–732. [Google Scholar] [CrossRef]
- Hu, J.; Morais, H.; Sousa, T.; Lind, M. Electric vehicle fleet management in smart grids: A review of services, optimization and control aspects. Renew. Sustain. Energy Rev. 2016, 56, 1207–1226. [Google Scholar] [CrossRef]
- Rahman, I.; Vasant, P.M.; Singh, B.S.M.; Abdullah-Al-Wadud, M.; Adnan, N. Review of recent trends in optimization techniques for plug-in hybrid, and electric vehicle charging infrastructures. Renew. Sustain. Energy Rev. 2016, 58, 1039–1047. [Google Scholar] [CrossRef]
- Das, H.; Rahman, M.; Li, S.; Tan, C. Electric vehicles standards, charging infrastructure, and impact on grid integration: A technological review. Renew. Sustain. Energy Rev. 2020, 120, 109618. [Google Scholar] [CrossRef]
- Emadi, A.; Lee, Y.J.; Rajashekara, K. Power Electronics and Motor Drives in Electric, Hybrid Electric, and Plug-In Hybrid Electric Vehicles. IEEE Trans. Ind. Electron. 2008, 55, 2237–2245. [Google Scholar] [CrossRef]
- Ehsani, M.; Gao, Y.; Miller, J.M. Hybrid Electric Vehicles: Architecture and Motor Drives. Proc. IEEE 2007, 95, 719–728. [Google Scholar] [CrossRef]
- Chakraborty, S.; Vu, H.-N.; Hasan, M.M.; Tran, D.-D.; El Baghdadi, M.; Hegazy, O. DC-DC Converter Topologies for Electric Vehicles, Plug-in Hybrid Electric Vehicles and Fast Charging Stations: State of the Art and Future Trends. Energies 2019, 12, 1569. [Google Scholar] [CrossRef]
- Metwaly, M.K.; Alsharef, M.; Sabiha, N.A.; Elattar, E.E.; Taha, I.B.M.; Abd-Elhady, A.M.; Elkalashy, N.I. Smart integration of drive system for induction motor applications in electric vehicles. Int. J. Power Electron. Drive Syst. (IJPEDS) 2021, 12, 20–28. [Google Scholar] [CrossRef]
- Ibrahim, M.E.; Mansour, A.S.; Abd-Elhady, A.M. A novel single-stage single-phase buck–boost inverter. Electr. Eng. 2017, 99, 345–356. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Stator Resistance | 0.294 | Ω |
| Stator Inductance | 0.00139 | H |
| Rotor Resistance | 0.156 | Ω |
| Rotor Inductance | 0.00074 | H |
| Magnetizing Inductance | 0.041 | H |
| No. of Poles | 4 | - |
| Moment of Inertia | 0.2 | kg·m2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elrefaey, M.S.; Ibrahim, M.E.; Eldin, E.T.; Hegazy, H.Y.; Abdalfatah, S.; EL-Kholy, E.E. A Proposed Three-Phase Induction Motor Drive System Suitable for Golf Cars. Energies 2022, 15, 6469. https://doi.org/10.3390/en15176469
Elrefaey MS, Ibrahim ME, Eldin ET, Hegazy HY, Abdalfatah S, EL-Kholy EE. A Proposed Three-Phase Induction Motor Drive System Suitable for Golf Cars. Energies. 2022; 15(17):6469. https://doi.org/10.3390/en15176469
Chicago/Turabian StyleElrefaey, Mohamed S., Mohamed E. Ibrahim, Elsayed Tag Eldin, Hossam Youssef Hegazy, Samia Abdalfatah, and Elwy E. EL-Kholy. 2022. "A Proposed Three-Phase Induction Motor Drive System Suitable for Golf Cars" Energies 15, no. 17: 6469. https://doi.org/10.3390/en15176469
APA StyleElrefaey, M. S., Ibrahim, M. E., Eldin, E. T., Hegazy, H. Y., Abdalfatah, S., & EL-Kholy, E. E. (2022). A Proposed Three-Phase Induction Motor Drive System Suitable for Golf Cars. Energies, 15(17), 6469. https://doi.org/10.3390/en15176469