
Wind Power Prediction Method: Support Vector Regression Optimized by Improved Jellyfish Search Algorithm

Abstract
:1. Introduction
- (1)
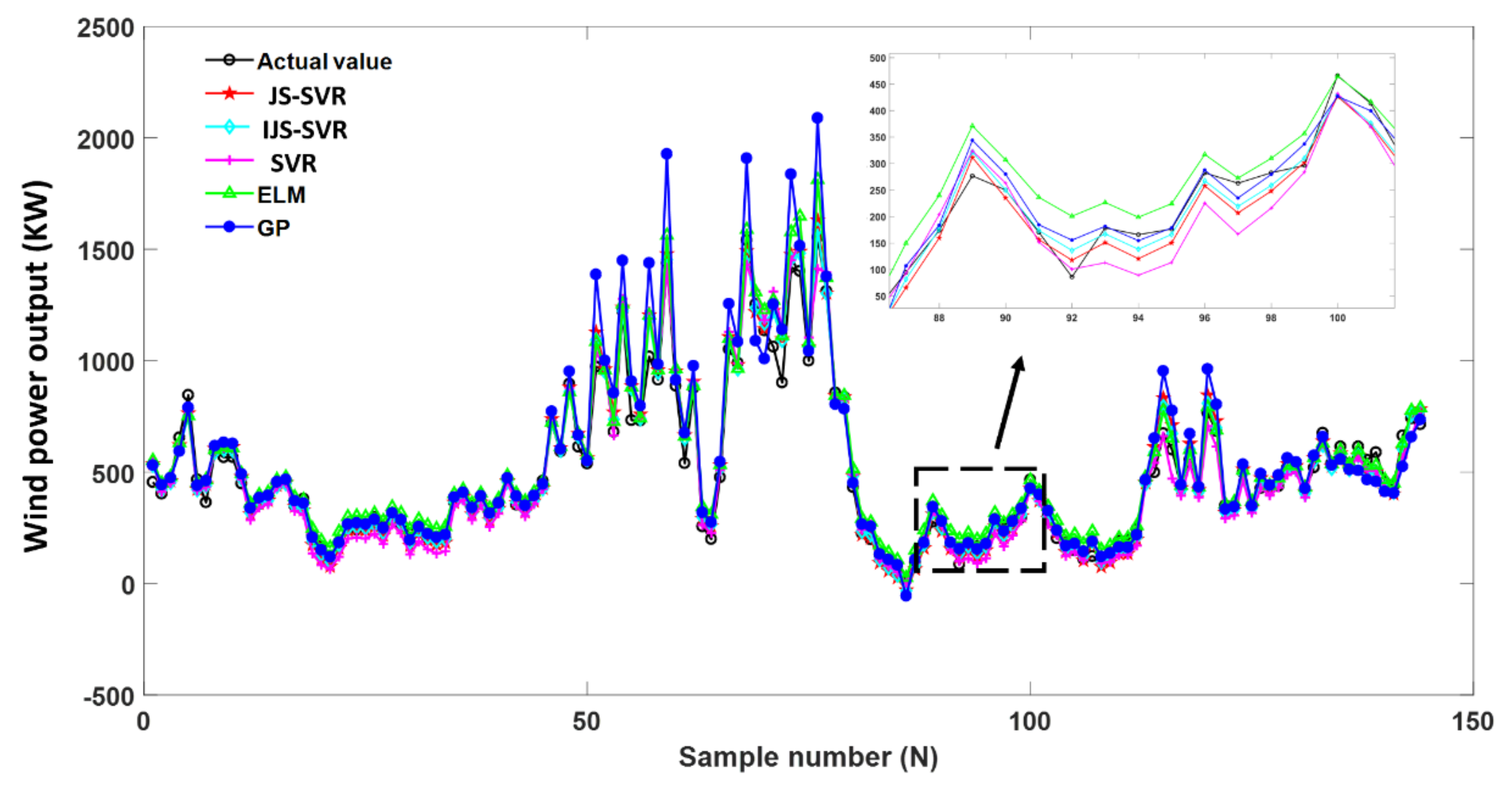
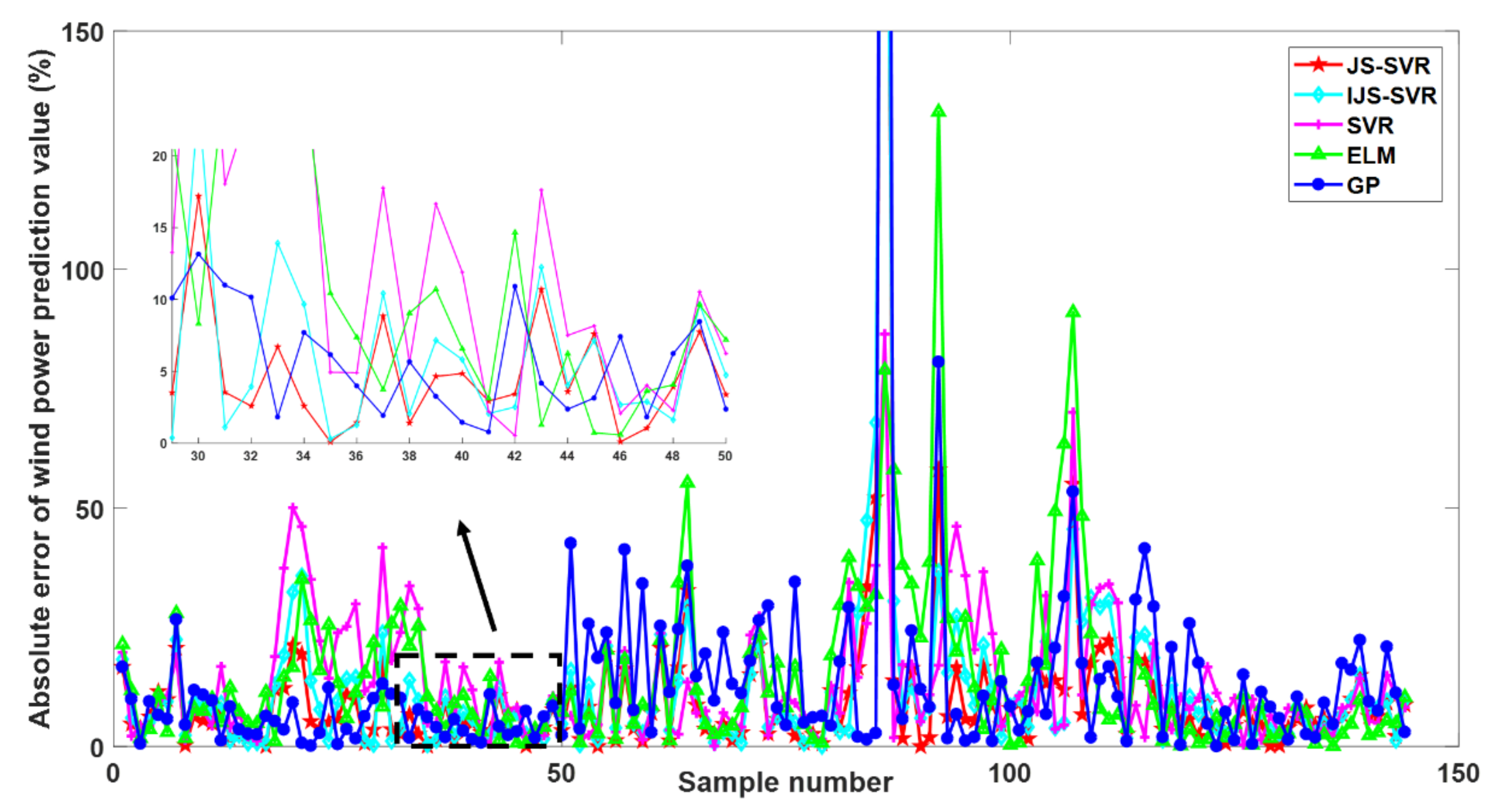
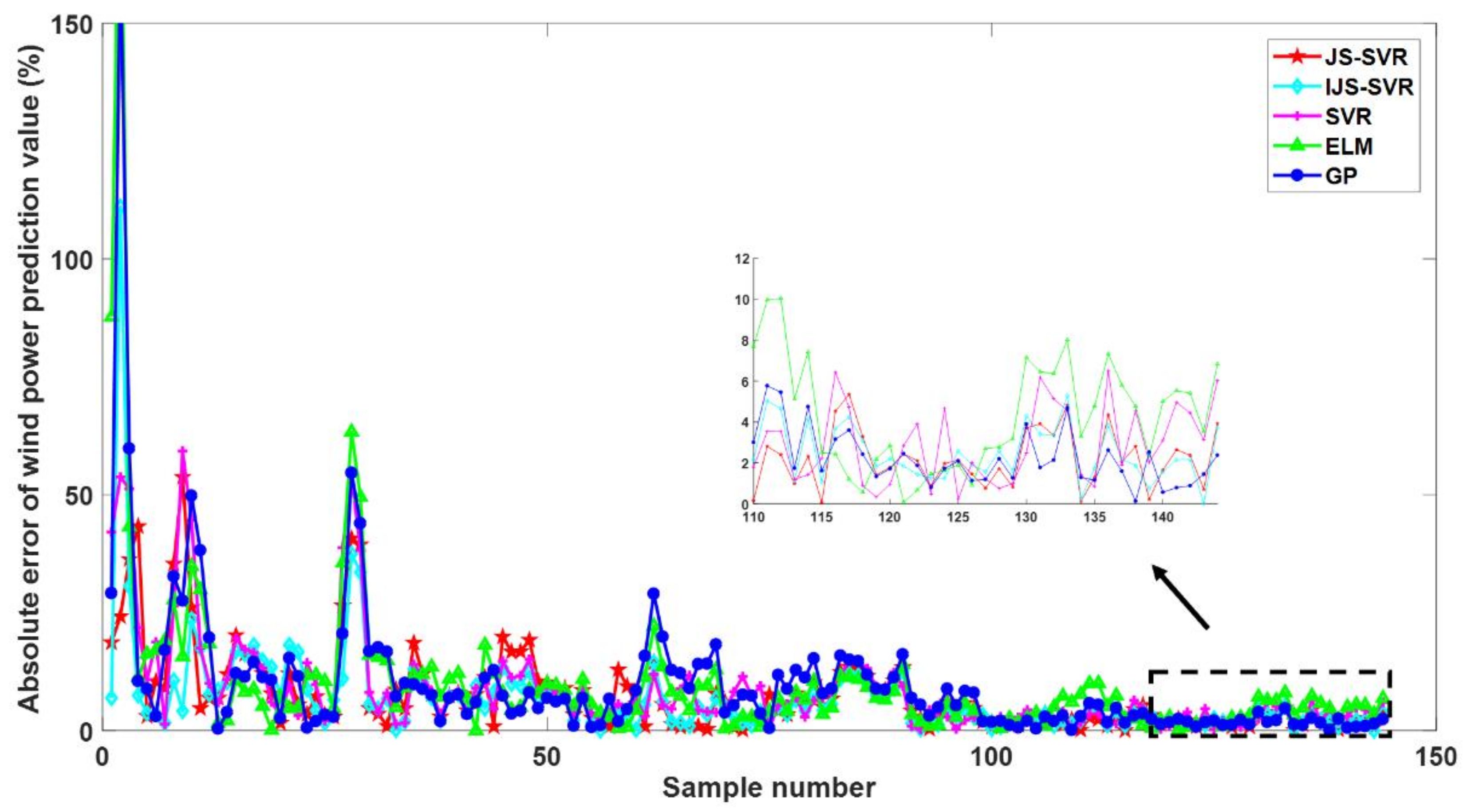
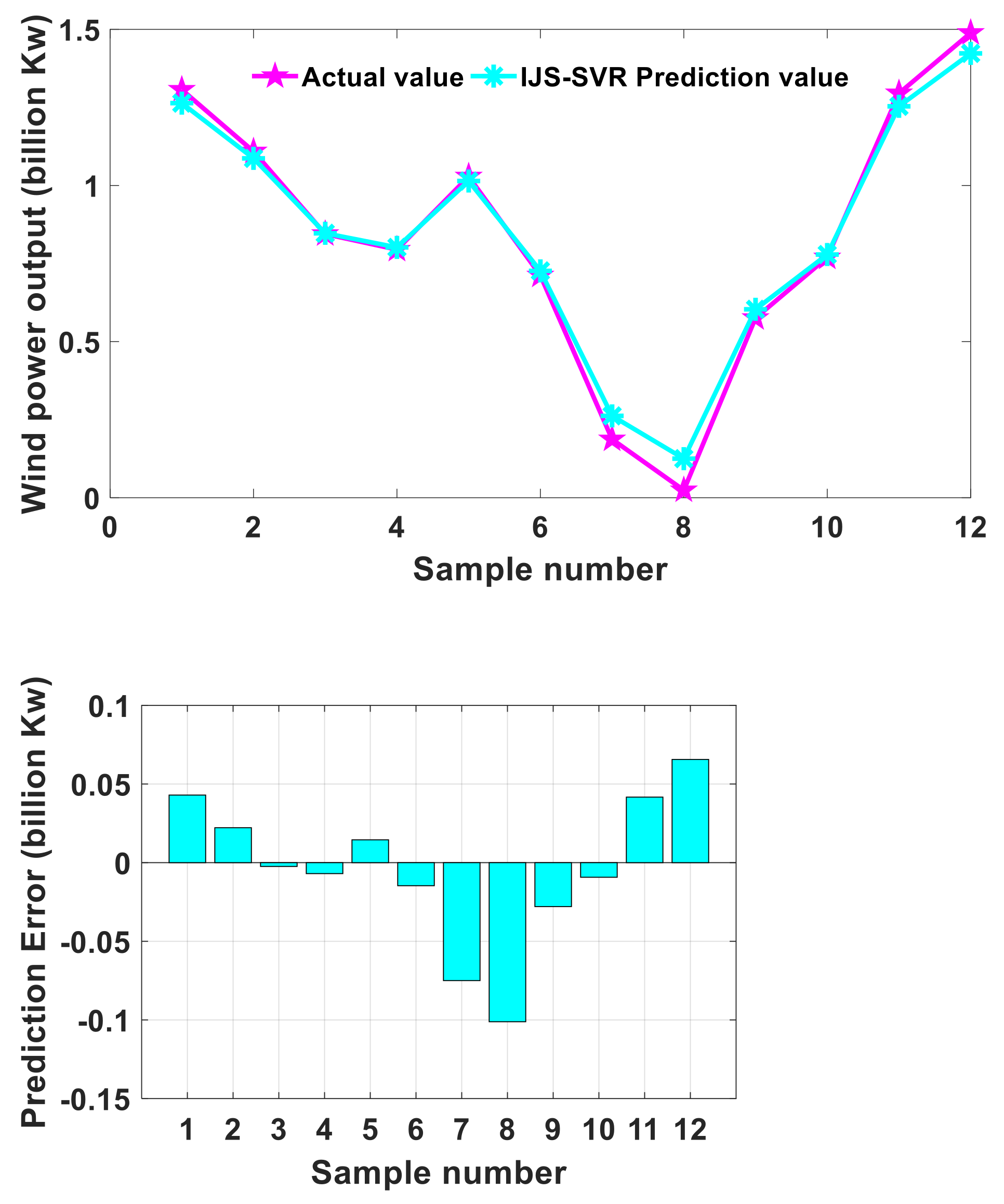
- An IJS-SVR model was proposed in this study. Compared with other methods, the IJS-SVR model proposed in this study could achieve better prediction results than other models in both seasons, and its prediction performance was better, which can improve the prediction accuracy of wind power.
- (2)
- The IJS algorithm was proposed. Compared with the comparative algorithms, the optimized values of IJS were all closer to 0. It exhibited good convergence ability, search stability, and optimization ability, as well as being more suitable for solving optimization problems.
- (3)
- This study provides a more economical and effective method of wind power to solve its uncertainties, and can be used as a reference for grid power generation planning and power system economic dispatch.
2. Literature Review
3. Methods
3.1. Support Vector Regression Model
3.2. Jellyfish Search Algorithm and Improvement
3.2.1. Jellyfish Search Algorithm
- (1)
- Following ocean current movement
- (2)
- Group movements
- (3)
- Time control mechanism
3.2.2. Improved Jellyfish Search Algorithm
- (1)
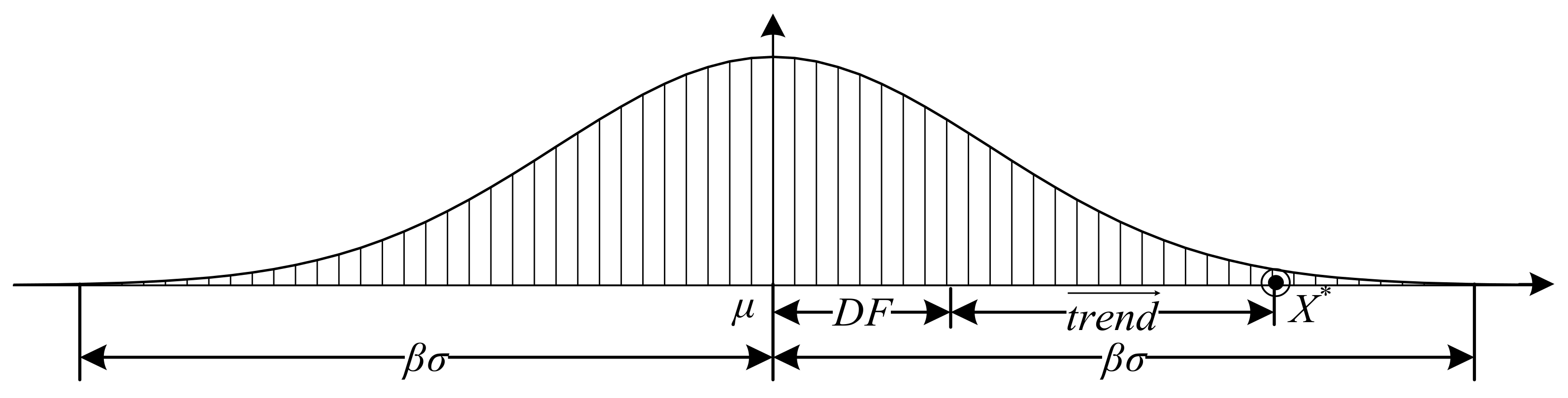
- Improvement of population location initialization strategy
- (2)
- Sinusoidal dynamic adaptive factor
- (3)
- Population variation operation
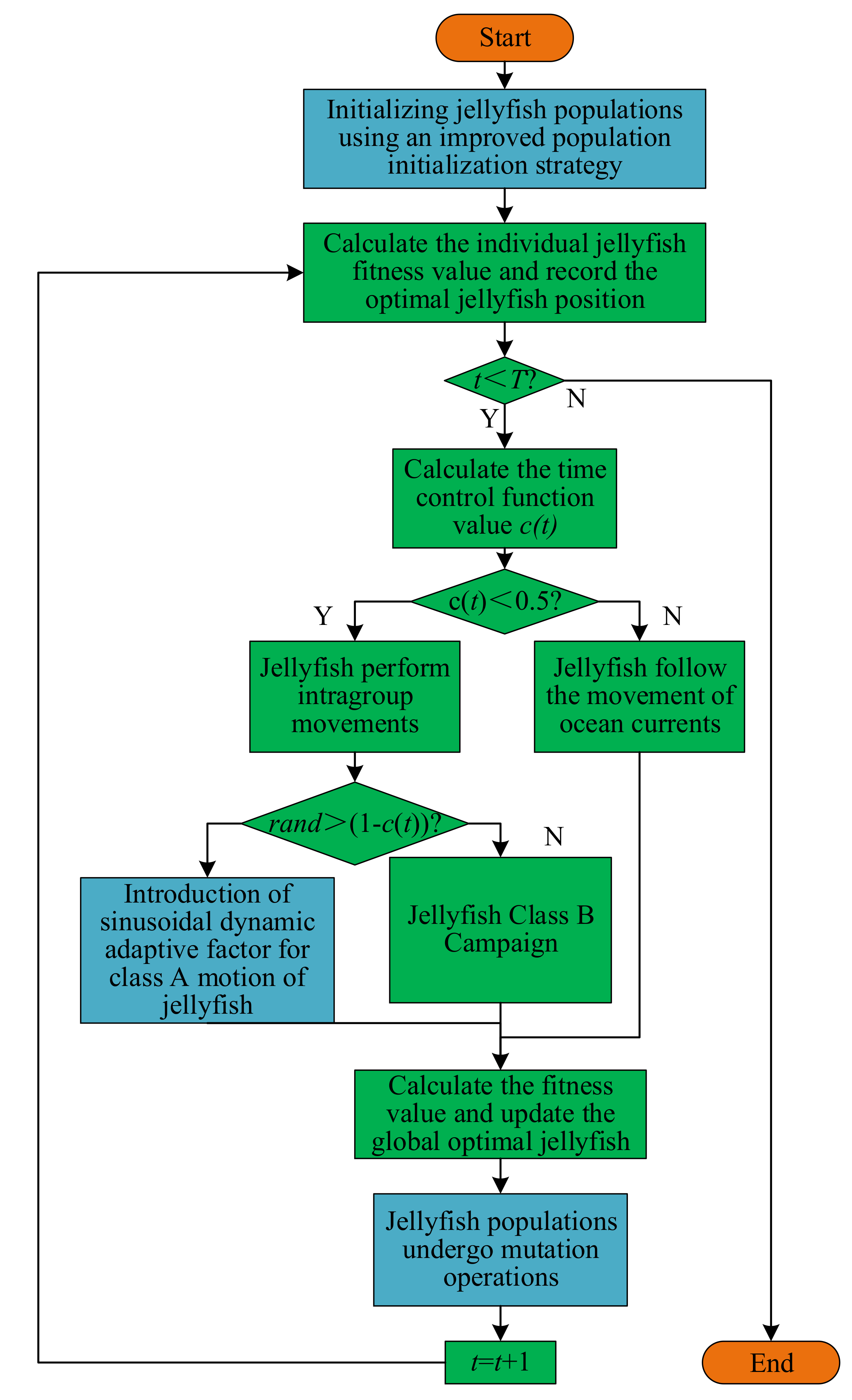
3.2.3. Steps of IJS Algorithm
3.3. Test of Algorithm Performance
4. Establishment of Prediction Model
4.1. Selection of Objective Function and Evaluation Index
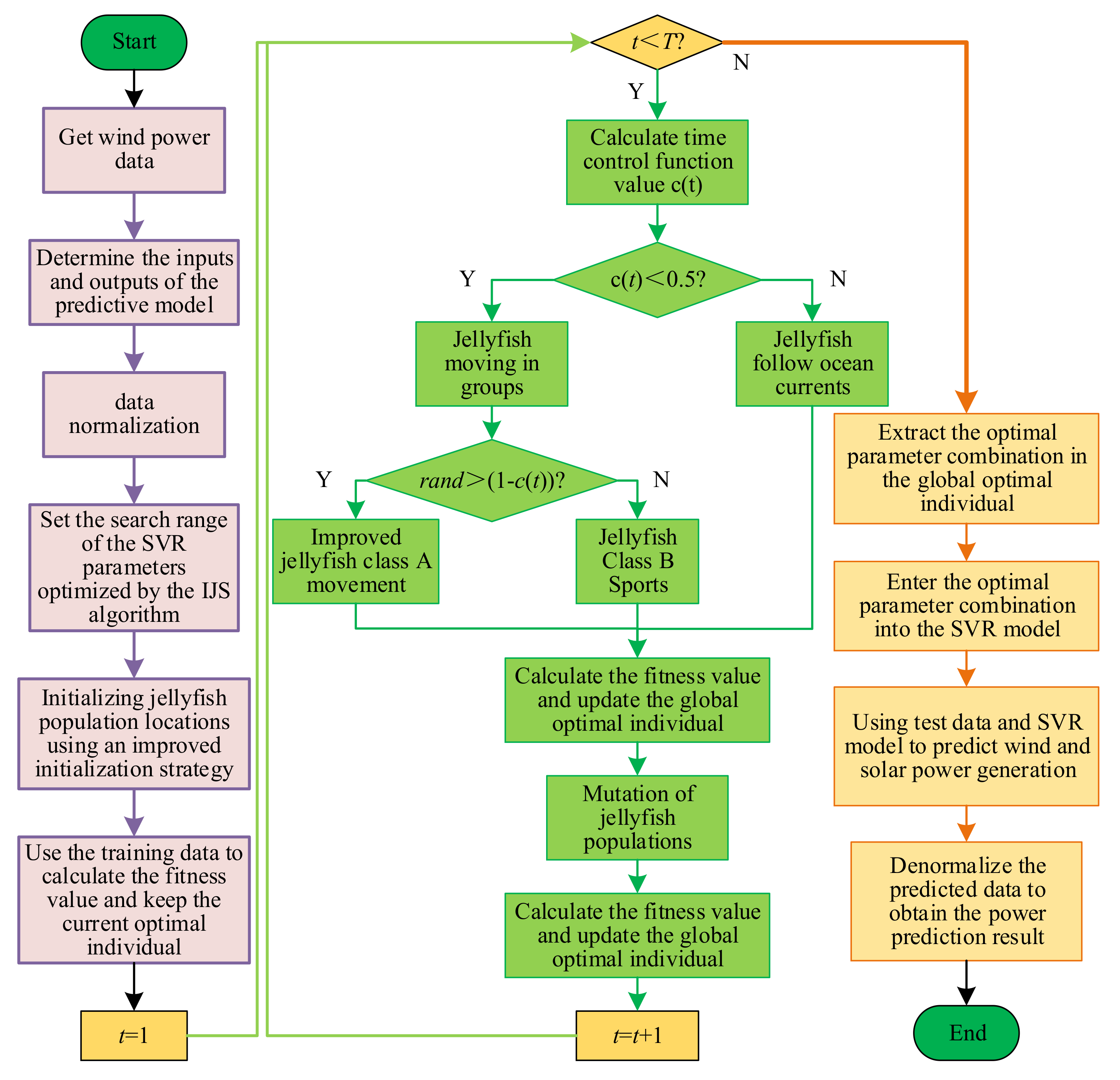
4.2. Establishment of the Wind Power Prediction Model Based on IJS-SVR
5. Result Analysis
5.1. Data Source and Processing
5.2. Analysis of Prediction Results
5.2.1. Case 1
5.2.2. Case 2
5.2.3. Case 3
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yu, M.; Chen, F.; Zheng, S.; Zhou, J.; Zhao, X.; Wang, Z.; Li, G.; Li, J.; Fan, Y.; Ji, J.; et al. Experimental Investigation of a Novel Solar Micro-Channel Loop-Heat-Pipe Photovoltaic/Thermal (MC-LHP-PV/T) System for Heat and Power Generation. Appl. Energy 2019, 256, 113929. [Google Scholar] [CrossRef]
- Wang, K.J.; Qi, X.X.; Liu, H.D. A comparison of day-ahead photovoltaic power predicting models based on deep learning neural network. Appl. Energy 2019, 251, 14. [Google Scholar] [CrossRef]
- Li, L.-L.; Liu, Z.-F.; Tseng, M.-L.; Zheng, S.-J.; Lim, M.K. Improved tunicate swarm algorithm: Solving the dynamic economic emission dispatch problems. Appl. Soft Comput. 2021, 108, 107504. [Google Scholar] [CrossRef]
- Liu, L.; Zhao, Y.; Chang, D.; Xie, J.; Ma, Z.; Sun, Q.; Yin, H.; Wennersten, R. Prediction of short-term PV power output and uncertainty analysis. Appl. Energy 2018, 228, 700–711. [Google Scholar] [CrossRef]
- Carvajal-Romo, G.; Valderrama-Mendoza, M.; Rodríguez-Urrego, D.; Rodríguez-Urrego, L. Assessment of solar and wind energy potential in La Guajira, Colombia: Current status, and future prospects. Sustain. Energy Technol. Assess. 2019, 36, 100531. [Google Scholar] [CrossRef]
- Han, Y.; Wang, N.; Ma, M.; Zhou, H.; Dai, S.; Zhu, H. A PV power interval predicting based on seasonal model and nonparametric estimation algorithm. Sol. Energy 2019, 184, 515–526. [Google Scholar] [CrossRef]
- Liu, Z.-F.; Li, L.-L.; Liu, Y.-W.; Liu, J.-Q.; Li, H.-Y.; Shen, Q. Dynamic economic emission dispatch considering renewable energy generation: A novel multi-objective optimization approach. Energy 2021, 235, 121407. [Google Scholar] [CrossRef]
- Niu, T.; Wang, J.Z.; Zhang, K.Q.; Du, P. Multi-step-ahead wind speed predicting based on optimal feature selection and a modified bat algorithm with the cognition strategy. Renew. Energy 2017, 118, 213–229. [Google Scholar] [CrossRef]
- Monfared, M.; Fazeli, M.; Lewis, R.; Searle, J. Fuzzy Predictor with Additive Learning for Very Short-Term PV Power Generation. IEEE Access 2019, 7, 91183–91192. [Google Scholar] [CrossRef]
- Liu, H.; Tian, H.Q.; Li, Y.F. Four wind speed multi-step predicting models using extreme learning machines and signal decomposing algorithms. Energy Convers. Manag. 2015, 100, 16–22. [Google Scholar] [CrossRef]
- Zhou, J.Y.; Shi, J.; Li, G. Fine tuning support vector machines for short-term wind speed predicting. Energy Convers. Manag. 2011, 52, 1990–1998. [Google Scholar] [CrossRef]
- Wang, K.J.; Qi, X.X.; Liu, H.D.; Song, J.K. Deep belief network based k-means cluster approach for short-term wind power prediction. Energy 2018, 165, 840–852. [Google Scholar] [CrossRef]
- Wang, H.K.; Song, K.; Cheng, Y. A Hybrid Predicting Model Based on CNN and Informer for Short-Term Wind Power. Front. Energy Res. 2022, 9, 1041. [Google Scholar]
- Pierro, M.; De Felice, M.; Maggioni, E.; Moser, D.; Perotto, A.; Spada, F.; Cornaro, C. Data-driven upscaling methods for regional photovoltaic power estimation and predict using satellite and numerical weather prediction data. Sol. Energy 2017, 158, 1026–1038. [Google Scholar] [CrossRef]
- Dai, S.Y.; Niu, D.X.; Han, Y.R. Predicting of Power Grid Investment in China Based on Support Vector Machine Optimized by Differential Evolution Algorithm and Grey Wolf Optimization Algorithm. Appl. Sci. 2018, 8, 636. [Google Scholar] [CrossRef]
- Yang, L.; He, M.; Zhang, J.S.; Vittal, V. Support-Vector-Machine-Enhanced Markov Model for Short-Term Wind Power Predict. IEEE Trans. Sustain. Energy 2015, 6, 791–799. [Google Scholar] [CrossRef]
- Cheng, Z.; Liu, Q.; Zhang, W. Improved Probability Prediction Method Research for Photovoltaic Power Output. Appl. Sci. 2019, 9, 2043. [Google Scholar] [CrossRef]
- Das, U.K.; Tey, K.S.; Seyedmahmoudian, M.; Idna Idris, M.Y.; Mekhilef, S.; Horan, B.; Stojcevski, A. SVR-Based Model to Predict PV Power Generation under Different Weather Conditions. Energies 2017, 10, 17. [Google Scholar] [CrossRef]
- Li, Y.Q.; Zhou, L.; Gao, P.Q.; Yang, B.; Han, Y.M.; Lian, C. Short-Term Power Generation Predicting of a Photovoltaic Plant Based on PSO-BP and GA-BP Neural Networks. Front. Energy Res. 2021, 9, 8. [Google Scholar]
- Lin, P.; Peng, Z.; Lai, Y.; Cheng, S.; Chen, Z.; Wu, L. Short-term power prediction for photovoltaic power plants using a hybrid improved Kmeans-GRA-Elman model based on multivariate meteorological factors and historical power datasets. Energy Convers. Manag. 2018, 177, 704–717. [Google Scholar] [CrossRef]
- Li, J.M.; Ward, J.K.; Tong, J.N.; Collins, L.; Platt, G. Machine learning for solar irradiance predicting of photovoltaic system. Renew. Energy 2015, 90, 542–553. [Google Scholar] [CrossRef]
- Chou, J.S.; Truong, D.N. A novel metaheuristic optimizer inspired by behavior of jellyfish in ocean. Appl. Math. Comput. 2020, 389, 125535. [Google Scholar] [CrossRef]
- Das, U.K.; Tey, K.S.; Seyedmahmoudian, M.; Mekhilef, S.; Idris, M.Y.; Van Deventer, W.; Horan, B.; Stojcevski, A. Predicting of photovoltaic power generation and model optimization: A review. Renew. Sustain. Energy Rev. 2017, 81, 912–928. [Google Scholar] [CrossRef]
- Fara, L.; Diaconu, A.; Craciunescu, D.; Fara, S. Predicting of Energy Production for Photovoltaic Systems Based on ARIMA and ANN Advanced Models. Int. J. Photoenergy 2021, 2021, 6777488. [Google Scholar] [CrossRef]
- Yu, L.; Ma, X.; Wu, W.; Xiang, X.; Wang, Y.; Zeng, B. Application of a novel time-delayed power-driven grey model to predict photovoltaic power generation in the Asia-Pacific region. Sustain. Energy Technol. Assess. 2020, 44, 14. [Google Scholar]
- Li, G.; Xie, S.; Wang, B.; Xin, J.; Li, Y.; Du, S. Photovoltaic Power Predicting with a Hybrid Deep Learning Approach. IEEE Access 2020, 8, 175871–175880. [Google Scholar] [CrossRef]
- Douiri, M.R. Particle swarm optimized neuro-fuzzy system for photovoltaic power predicting model. Sol. Energy 2019, 184, 91–104. [Google Scholar] [CrossRef]
- Bracale, A.; Caramia, P.; Carpinelli, G.; Di Fazio, A.R.; Ferruzzi, G. A Bayesian Method for Short-Term Probabilistic Forecasting of Photovoltaic Generation in Smart Grid Operation and Control. Energies 2013, 6, 733–747. [Google Scholar] [CrossRef]
- Al-Dahidi, S.; Ayadi, O.; Adeeb, J.; Louzazni, M. Assessment of Artificial Neural Networks Learning Algorithms and Training Datasets for Solar Photovoltaic Power Production Prediction. Front. Energy Res. 2019, 7, 18. [Google Scholar] [CrossRef]
- Huang, C.; Cao, L.; Peng, N.; Li, S.; Zhang, J.; Wang, L.; Luo, X.; Wang, J.H. Day-Ahead Predicting of Hourly Photovoltaic Power Based on Robust Multilayer Perception. Sustainability 2018, 10, 8. [Google Scholar] [CrossRef]
- Hua, C.; Zhu, E.; Kuang, L.; Pi, D. Short-term power prediction of photovoltaic power station based on long short-term memory-back-propagation. Int. J. Distrib. Sens. Netw. 2019, 15, 9. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhou, N.; Gong, L.; Jiang, M. Prediction of photovoltaic power output based on similar day analysis, genetic algorithm and extreme learning machine. Energy 2020, 204, 10. [Google Scholar] [CrossRef]
- Liu, Z.-F.; Li, L.-L.; Tseng, M.-L.; Lim, M.K. Prediction short-term photovoltaic power using improved chicken swarm optimizer—Extreme learning machine model. J. Clean. Prod. 2019, 248, 119272. [Google Scholar] [CrossRef]
- Wang, X.; Sun, Y.; Luo, D.; Peng, J. Comparative study of machine learning approaches for predicting short-term photovoltaic power output based on weather type classification. Energy 2021, 240, 122733. [Google Scholar] [CrossRef]
- Mojumder, J.C.; Ong, H.C.; Chong, W.T.; Shamshirband, S.; Al Mamoon, A. Application of support vector machine for prediction of electrical and thermal performance in PV/T system. Energy Build. 2016, 111, 267–277. [Google Scholar] [CrossRef]
- Eseye, A.T.; Zhang, J.H.; Zheng, D.H. Short-term photovoltaic solar power predicting using a hybrid Wavelet-PSO-SVM model based on SCADA and Meteorological information. Renew. Energy 2017, 118, 357–367. [Google Scholar] [CrossRef]
- Yang, S.X.; Zhu, X.G.; Peng, S.J. Prospect Prediction of Terminal Clean Power Consumption in China via LSSVM Algorithm Based on Improved Evolutionary Game Theory. Energies 2020, 13, 17. [Google Scholar] [CrossRef]
- Amroune, M.; Bouktir, T.; Musirin, I. Power System Voltage Stability Assessment Using a Hybrid Approach Combining Dragonfly Optimization Algorithm and Support Vector Regression. Arab. J. Sci. Eng. 2018, 43, 3023–3036. [Google Scholar] [CrossRef]
- Engie. The La Haute Borne Wind Farm. 2018. Available online: https://opendata-renewables.engie.com/explore/?sort=modified (accessed on 21 March 2022).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Range | opt |
|---|---|---|
| [−100, 100] | 0 | |
| [−10, 10] | 0 | |
| [−100, 100] | 0 | |
| [−5.12, 5.12] | 0 | |
| [−32, 32] | 0 | |
| [−600, 600] | 0 |
| Algorithm | Parameters | Value | Max-Iteration | Population | Dimension |
|---|---|---|---|---|---|
| JS | Motion coefficient | 0.1 | 500 | 30 | 30 |
| GOA | Decreasing factor | max = 1, min = 0.00001 | 500 | 30 | 30 |
| PSO | Inertia factor | max = 0.9, min = 0.4 | 500 | 30 | 30 |
| Acceleration factor | C1 = C2 = 2 | 500 | 30 | 30 | |
| SOA | Control Factors | 2 | 500 | 30 | 30 |
| Spiral shape parameters | u = 1, v = 1 | 500 | 30 | 30 |
| F1 | F2 | F3 | ||||
|---|---|---|---|---|---|---|
| Algorithm | AVE | STD | AVE | STD | AVE | STD |
| JS | 7.20 × 10−23 | 3.94 × 10−22 | 4.95 × 10−10 | 2.71 × 10−9 | 3.33 × 101 | 1.05 × 102 |
| IJS | 7.41 × 10−120 | 4.06 × 10−119 | 5.22 × 10−69 | 2.72 × 10−68 | 3.96 × 10−6 | 2.17 × 10−5 |
| SOA | 8.42 × 10−12 | 1.44 × 10−11 | 1.78 × 10−8 | 1.41 × 10−8 | 1.76 × 10−3 | 8.13 × 10−3 |
| PSO | 1.56 × 10−1 | 9.09 × 10−2 | 1.62 × 100 | 6.64 × 10−1 | 8.41 × 101 | 3.07 × 101 |
| GOA | 2.08 × 10−8 | 3.17 × 10−8 | 2.02 × 100 | 2.82 × 100 | 7.22 × 10−6 | 2.37 × 10−5 |
| ALO | 1.06 × 101 | 1.91 × 101 | 1.22 × 102 | 8.02 × 101 | 7.86 × 10−2 | 2.97 × 10−1 |
| F4 | F5 | F6 | ||||
|---|---|---|---|---|---|---|
| Algorithm | AVE | STD | AVE | STD | AVE | STD |
| JS | 1.70 × 10−1 | 6.22 × 10−1 | 6.97 × 10−14 | 2.16 × 10−13 | 0 | 0 |
| IJS | 0 | 0 | 1.84 × 10−15 | 1.60 × 10−15 | 0 | 0 |
| SOA | 2.73 × 100 | 4.78 × 100 | 2.00 × 101 | 1.74 × 10−3 | 2.09 × 10−2 | 3.32 × 10−2 |
| PSO | 1.54 × 102 | 2.52 × 101 | 2.87 × 10−1 | 5.04 × 10−1 | 7.66 × 10−3 | 7.89 × 10−3 |
| GOA | 9.83 × 100 | 6.74 × 100 | 5.88 × 10−1 | 8.70 × 10−1 | 1.61 × 10−1 | 8.20 × 10−2 |
| ALO | 1.61 × 102 | 2.81 × 101 | 4.73 × 10−1 | 6.46 × 10−1 | 1.76 × 10−1 | 7.11 × 10−2 |
| Model | MAE (KW) | MAPE (%) | R2 (%) | RMSE (KW) | T (s) |
|---|---|---|---|---|---|
| JS-SVR | 39.48 | 12.50 | 97.29 | 53.95 | 6.09 |
| IJS-SVR | 33.48 | 10.76 | 97.94 | 47.03 | 6.22 |
| SVR | 48.76 | 13.80 | 96.24 | 63.63 | 0.33 |
| ELM | 48.42 | 14.82 | 95.85 | 66.83 | 1.53 |
| GP | 65.36 | 14.72 | 87.49 | 116.0 | 32.60 |
| Model | MAE (KW) | MAPE (%) | R2 (%) | RMSE (KW) | T (s) |
|---|---|---|---|---|---|
| JS-SVR | 60.34 | 7.48 | 97.75 | 77.18 | 10.94 |
| IJS-SVR | 53.81 | 6.75 | 98.34 | 66.26 | 11.66 |
| SVR | 65.47 | 8.56 | 97.61 | 79.47 | 0.35 |
| ELM | 72.69 | 10.18 | 97.18 | 86.32 | 0.27 |
| GP | 68.00 | 9.75 | 97.44 | 82.24 | 32.40 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, D.-D.; Li, M.; Li, H.-Y.; Lin, C.-J.; Ji, B.-X. Wind Power Prediction Method: Support Vector Regression Optimized by Improved Jellyfish Search Algorithm. Energies 2022, 15, 6404. https://doi.org/10.3390/en15176404
Yuan D-D, Li M, Li H-Y, Lin C-J, Ji B-X. Wind Power Prediction Method: Support Vector Regression Optimized by Improved Jellyfish Search Algorithm. Energies. 2022; 15(17):6404. https://doi.org/10.3390/en15176404
Chicago/Turabian StyleYuan, Dong-Dong, Ming Li, Heng-Yi Li, Cheng-Jian Lin, and Bing-Xiang Ji. 2022. "Wind Power Prediction Method: Support Vector Regression Optimized by Improved Jellyfish Search Algorithm" Energies 15, no. 17: 6404. https://doi.org/10.3390/en15176404
APA StyleYuan, D.-D., Li, M., Li, H.-Y., Lin, C.-J., & Ji, B.-X. (2022). Wind Power Prediction Method: Support Vector Regression Optimized by Improved Jellyfish Search Algorithm. Energies, 15(17), 6404. https://doi.org/10.3390/en15176404