
Double Impedance-Substitution Control of DFIG Based Wind Energy Conversion System


Abstract
:1. Introduction
2. Transient Characteristics of DFIG under Grid Voltage Sags
2.1. DFIG Model
2.2. EMF Transient Characteristics
3. The Principle of DISC
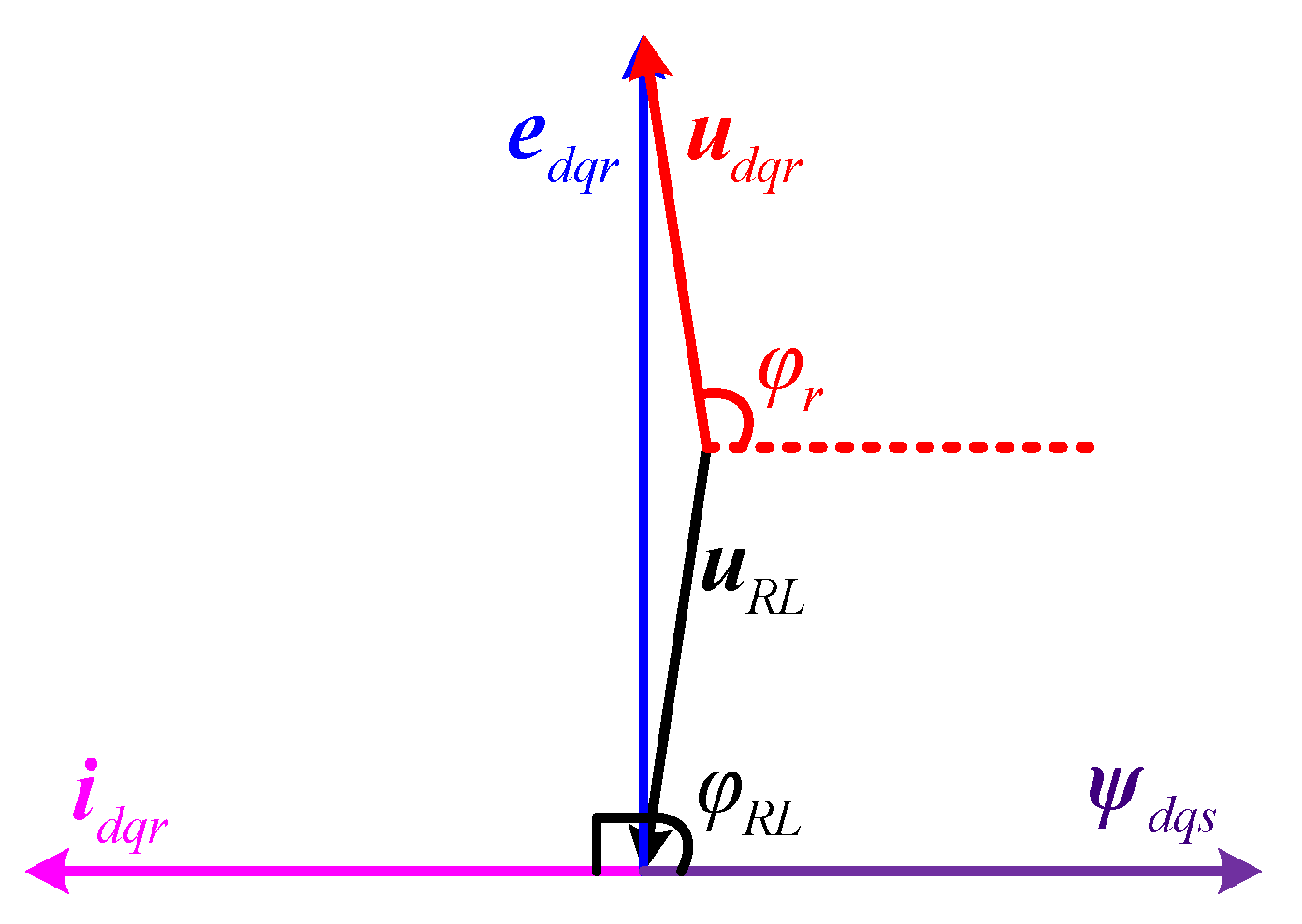
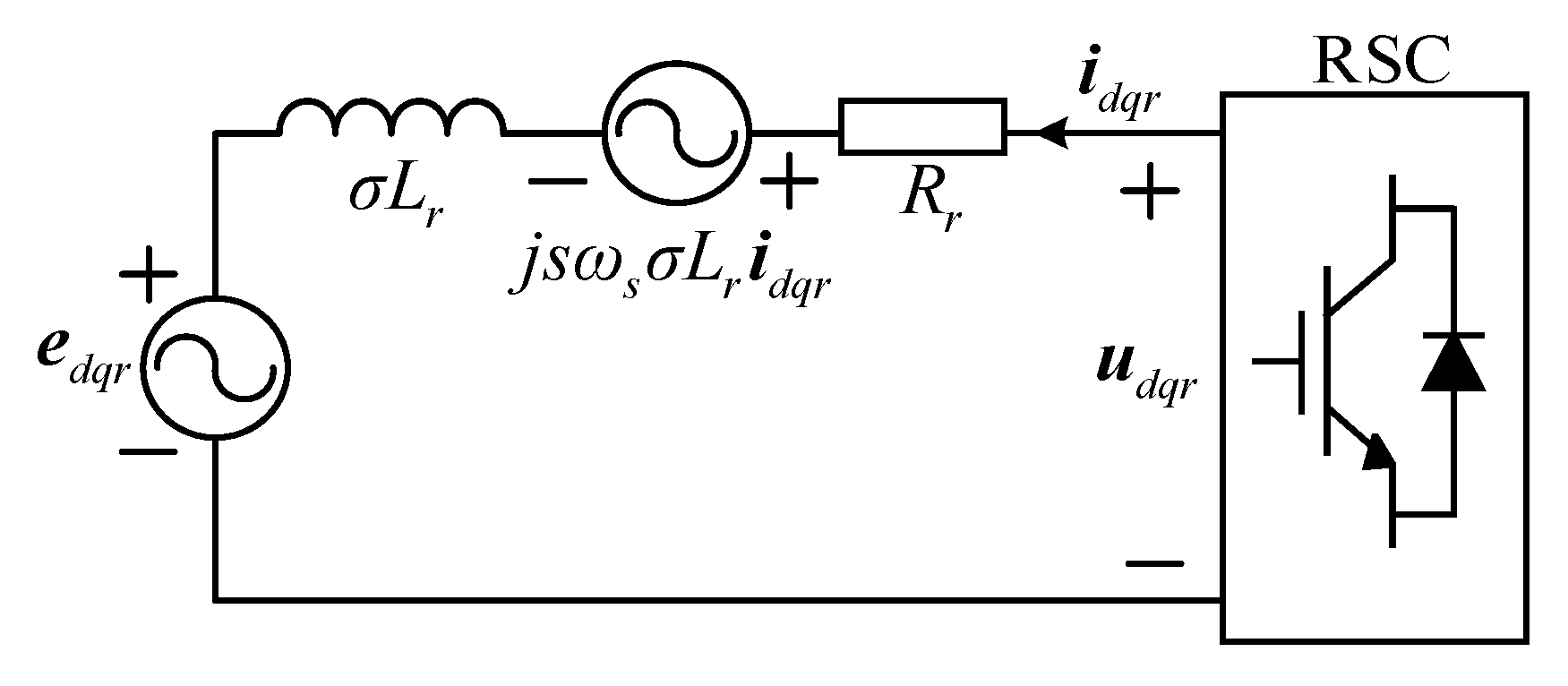
3.1. Rotor Current Request Analysis
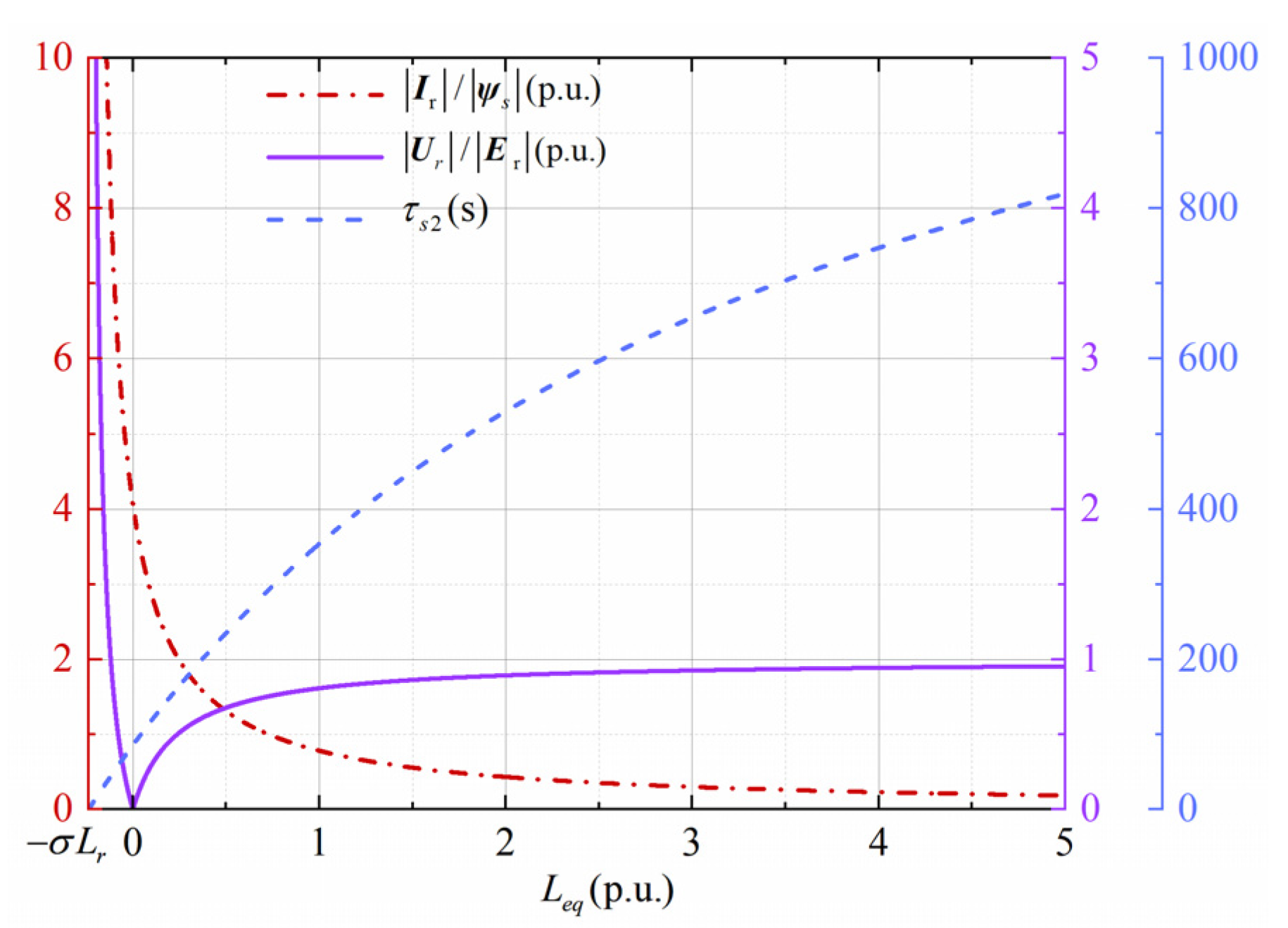
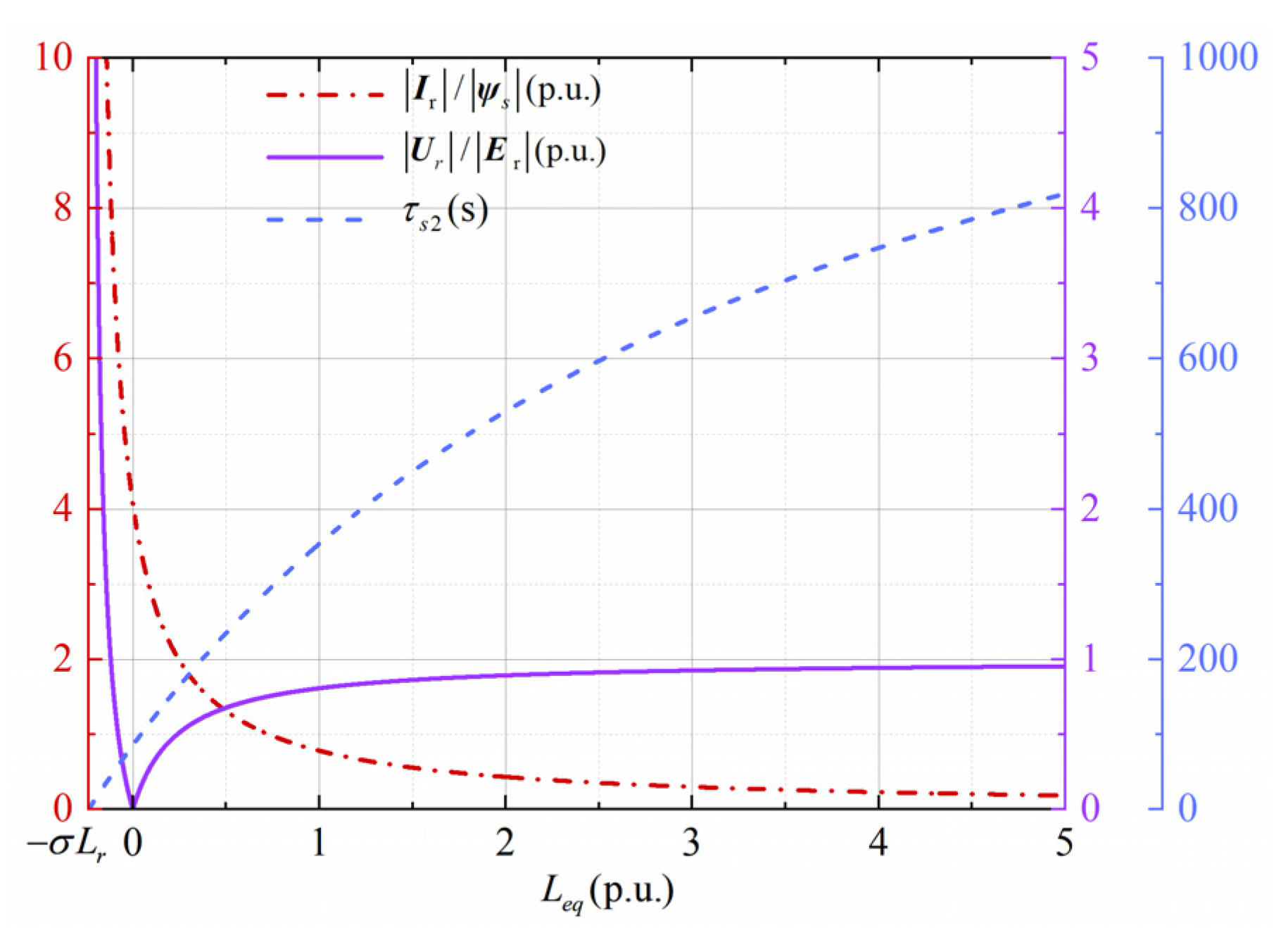
3.2. Double Substitution-Impedance Design
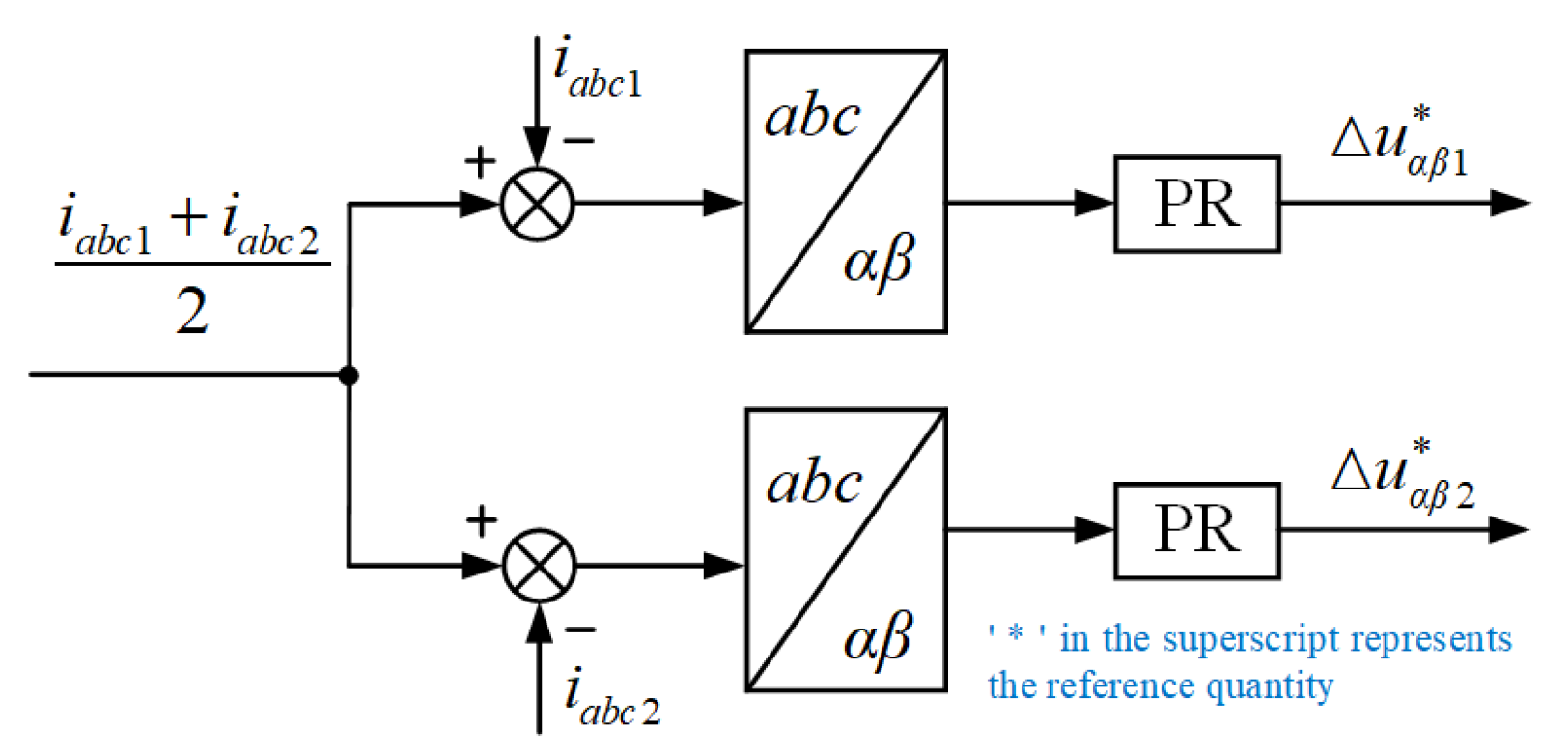
3.3. Instantaneous Current-Sharing Control Strategy
3.4. The Specific Implementation of the DISC Strategy
- (1)
- Normal condition
- (2)
- Fault condition
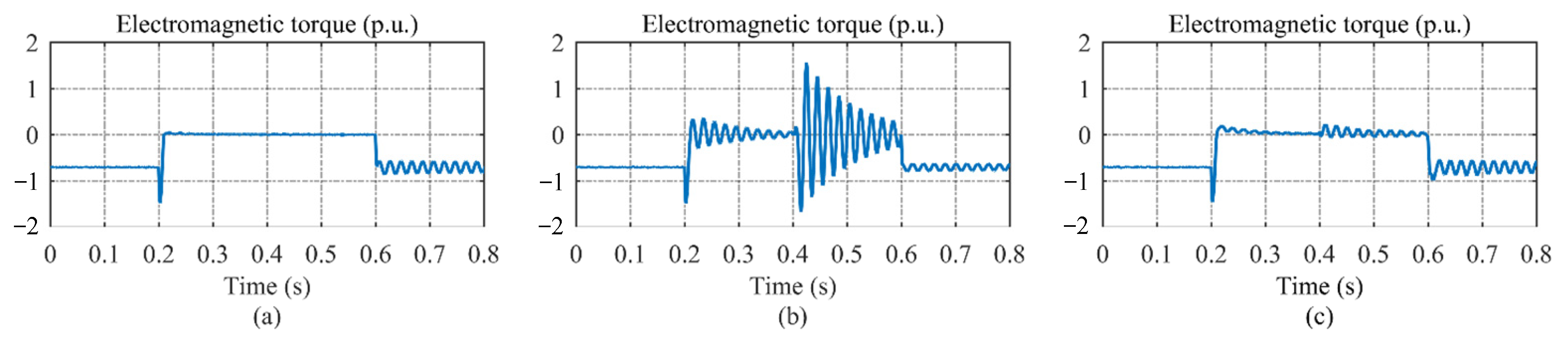
3.5. Torque Ripple Analysis
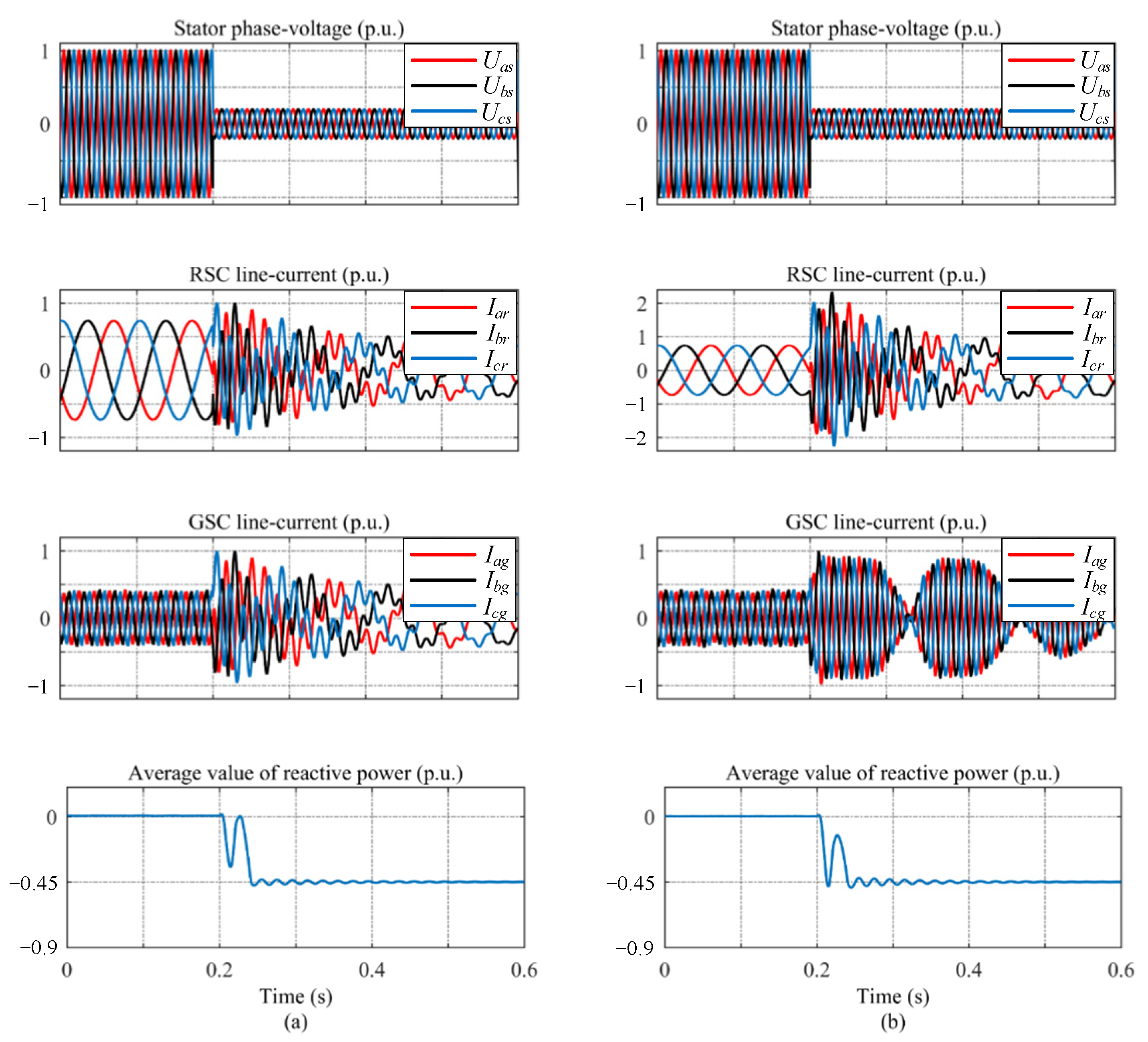
4. Simulation Results
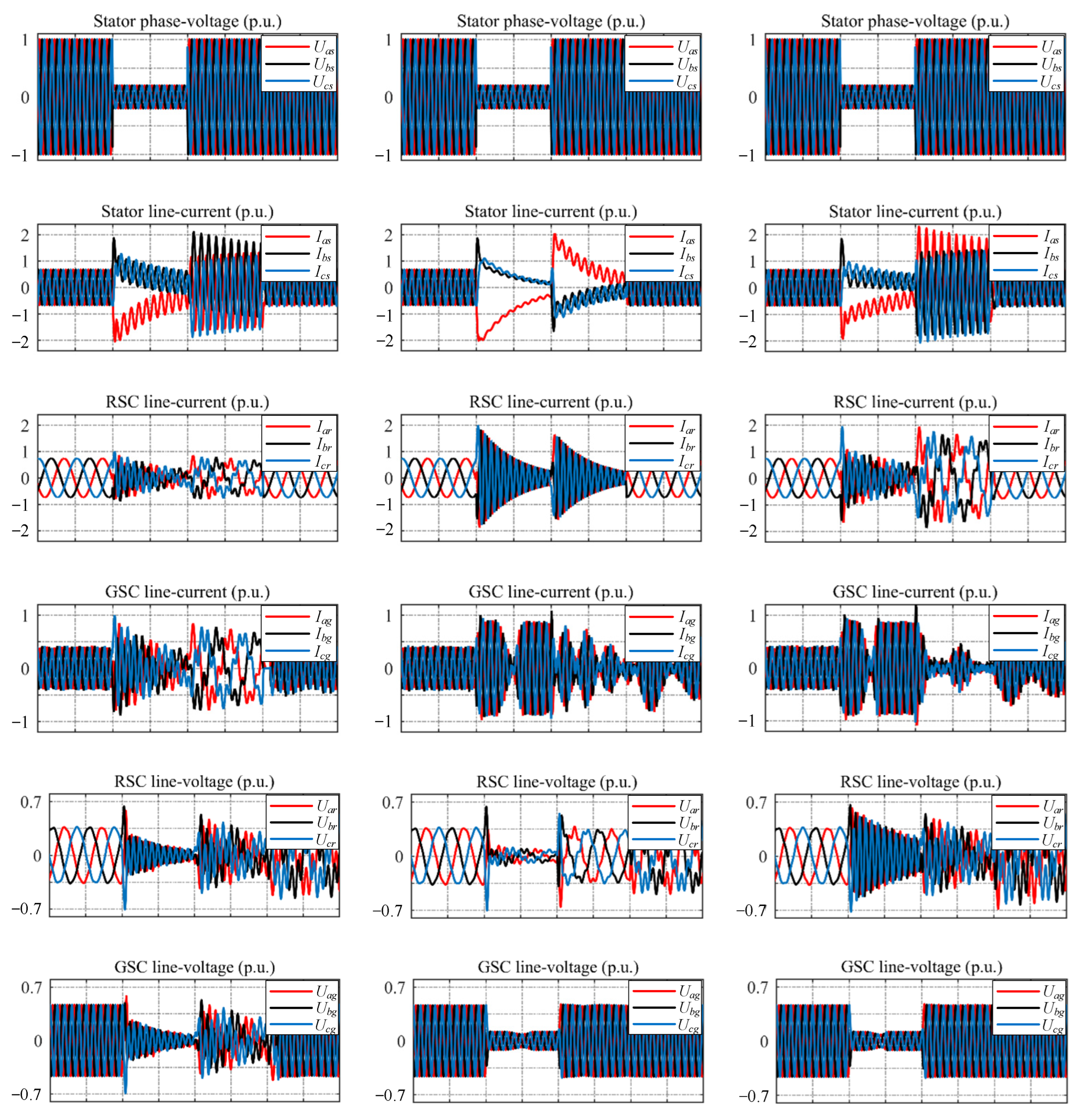
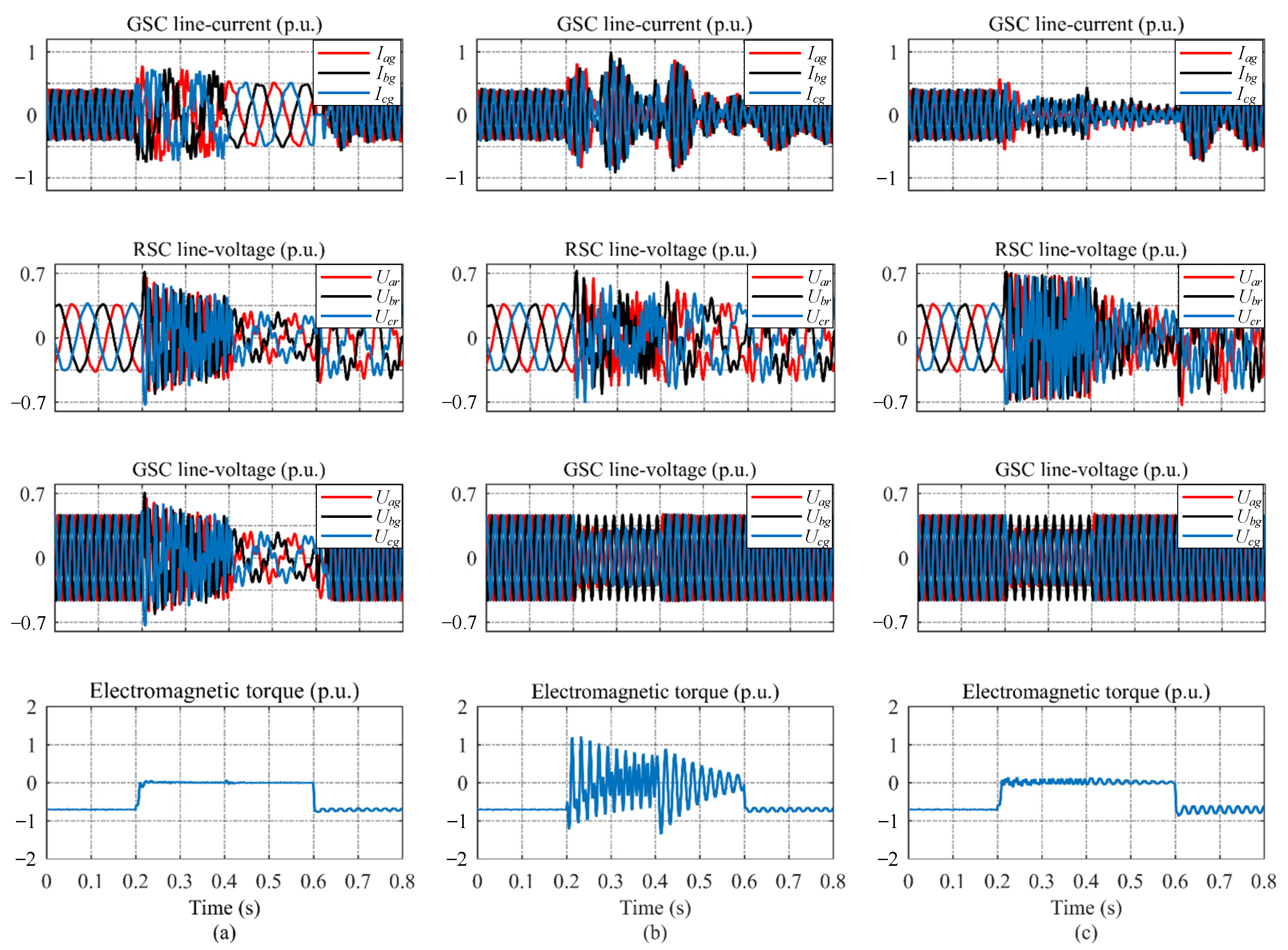
4.1. Symmetrical Faults
4.2. Single-Phase Faults
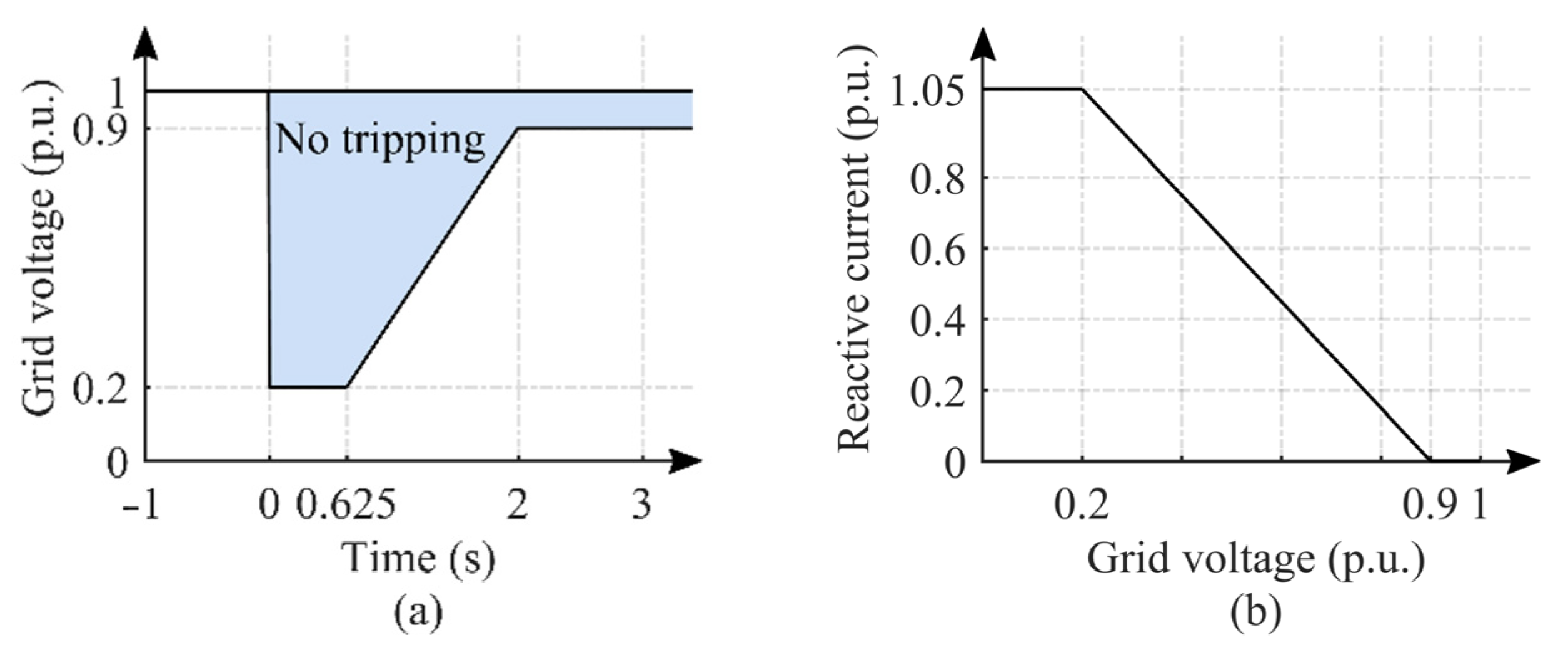
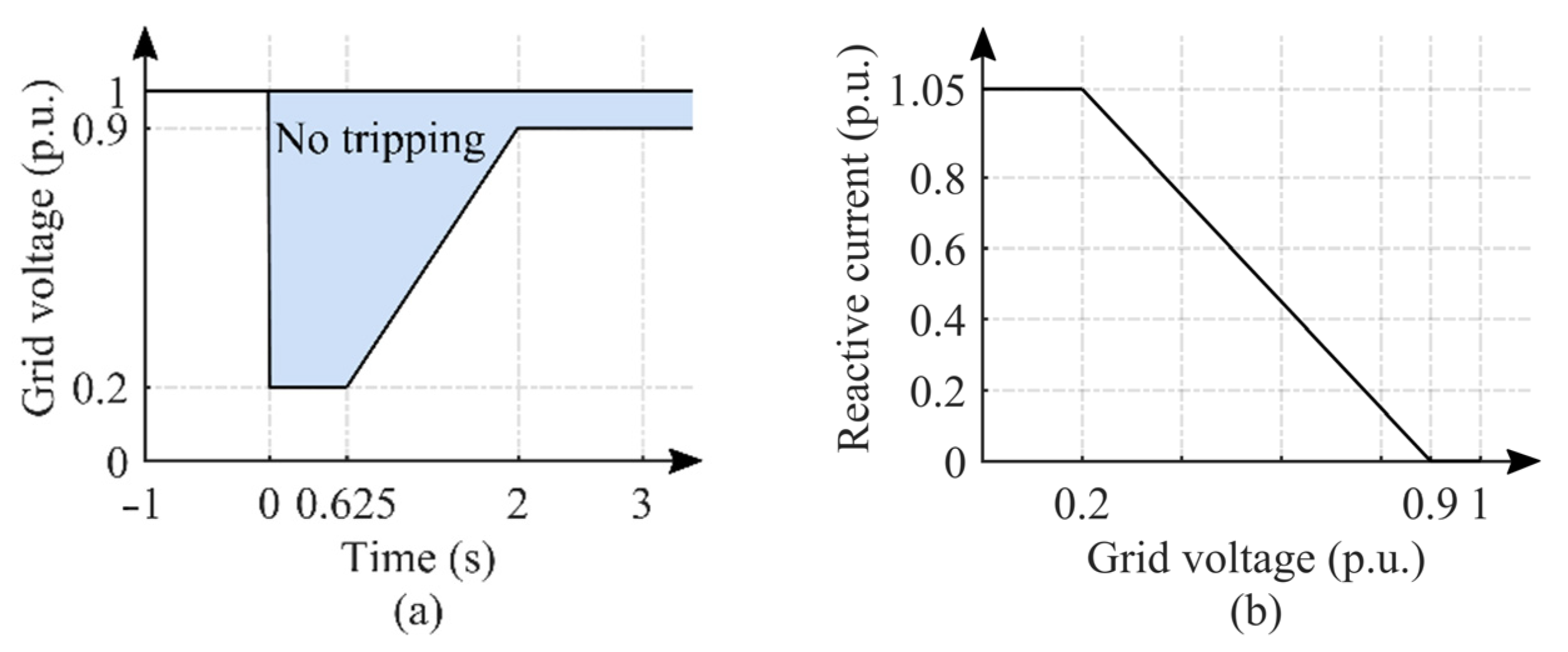
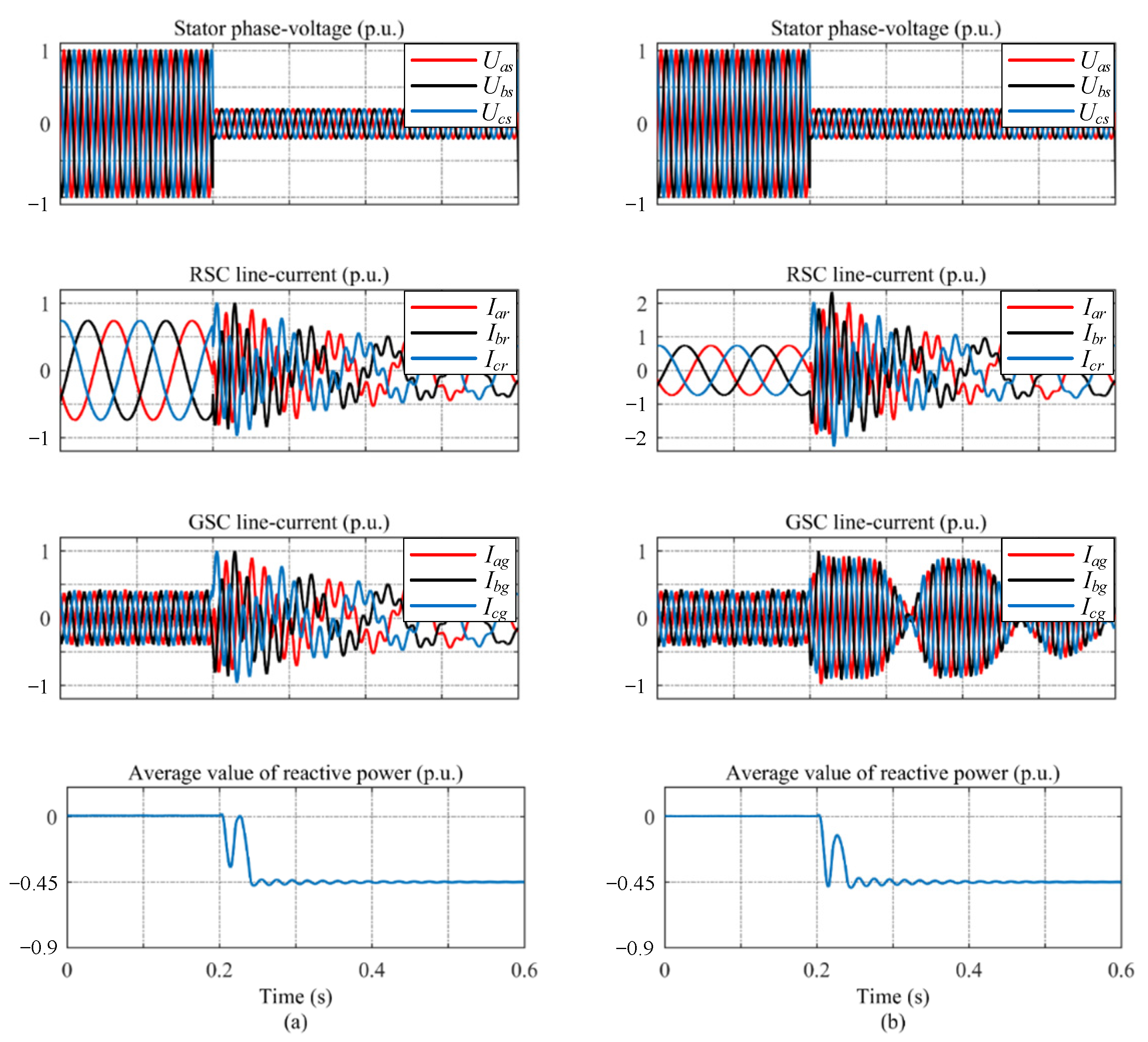
4.3. Assessment of Reactive Power Support Capacity
5. Conclusions
- (1)
- When a severe fault occurs in the grid, without proper control, the EMF causes the RSC to saturate and lose control of the system. Therefore, evaluating whether an LVRT control strategy is valid depends on whether the RSC under this strategy is saturated.
- (2)
- Based on Lenz’s law analysis of rotor port characteristics, it is concluded that during LVRT, by controlling the rotor current and stator flux linkage to reverse, the RSC is the most difficult to saturate. At this point, the RSC is equivalent to the inductive impedance, and the torque ripple can also be eliminated.
- (3)
- during a grid fault, considering that the current stress withstood by the RSC is large, and the utilization rate of the GSC is very low, this paper proposes a DISC strategy. Under the condition that the grid voltage sags by 80%, unlike the existing control strategy, the DISC strategy can maintain the current flowing through the RSC and GSC within
- (4)
- If the DFIG meets the reactive power requirements during LVRT, the RSC must have a sufficient current margin at the beginning of the fault. Otherwise, an excessive current damages the RSC and causes severe losses.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mahela, O.P.; Gupta, N.; Khosravy, M.; Patel, N. Comprehensive Overview of Low Voltage Ride Through Methods of Grid Integrated Wind Generator. IEEE Access 2019, 7, 99299–99326. [Google Scholar] [CrossRef]
- Rahimi, M. Analytical assessment of the impact of stator-series passive resistive hardware (SSPRH) on transient response and fault current contribution in DFIG based wind turbines. Electr. Power Syst. Res. 2019, 177, 105959. [Google Scholar] [CrossRef]
- Zou, X.; Zhu, D.; Hu, J.; Zhou, S.; Kang, Y. Mechanism Analysis of the Required Rotor Current and Voltage for DFIG-Based WTs to Ride-Through Severe Symmetrical Grid Faults. IEEE Trans. Power Electron. 2018, 33, 7300–7304. [Google Scholar] [CrossRef]
- Geng, H.; Liu, C.; Yang, G. LVRT Capability of DFIG-Based WECS Under Asymmetrical Grid Fault Condition. IEEE Trans. Ind. Electron. 2013, 60, 2495–2509. [Google Scholar] [CrossRef]
- Amalorpavaraj, R.A.J.; Kaliannan, P.; Padmanaban, S.; Subramaniam, U.; Ramachandaramurthy, V.K. Improved Fault Ride Through Capability in DFIG Based Wind Turbines Using Dynamic Voltage Restorer with Combined Feed-Forward and Feed-Back Control. IEEE Access 2017, 5, 20494–20503. [Google Scholar] [CrossRef]
- Meegahapola, L.G.; Littler, T.; Flynn, D. Decoupled-DFIG Fault Ride-Through Strategy for Enhanced Stability Performance during Grid Faults. IEEE Trans. Sustain. Energy 2010, 1, 152–162. [Google Scholar] [CrossRef] [Green Version]
- Xie, D.L.; Xu, Z.; Yang, L.H.; Ostergaard, J.; Xue, Y.S. A Comprehensive LVRT Control Strategy for DFIG Wind Turbines with Enhanced Reactive Power Support. IEEE Trans. Power Syst. 2013, 28, 3302–3310. [Google Scholar] [CrossRef]
- Firouzi, M.; Gharehpetian, G.B. LVRT Performance Enhancement of DFIG-Based Wind Farms by Capacitive Bridge-Type Fault Current Limiter. IEEE Trans. Sustain. Energy 2018, 9, 1118–1125. [Google Scholar] [CrossRef]
- Guo, W.Y.; Xiao, L.Y.; Dai, S.T.; Li, Y.H.; Xu, X.; Zhou, W.W.; Li, L. LVRT Capability Enhancement of DFIG with Switch-Type Fault Current Limiter. IEEE Trans. Ind. Electron. 2015, 62, 332–342. [Google Scholar] [CrossRef]
- Zou, Z.C.; Liao, J.C.; Lei, Y.; Mu, Z.L.; Xiao, X.Y. Postfault LVRT Performance Enhancement of DFIG Using a Stage-Controlled SSFCL-RSDR. IEEE Trans. Appl. Supercond. 2019, 29, 5601306. [Google Scholar] [CrossRef]
- Yan, X.W.; Venkataramanan, G.; Wang, Y.; Dong, Q.; Zhang, B. Grid-Fault Tolerant Operation of a DFIG Wind Turbine Generator Using a Passive Resistance Network. IEEE Trans. Power Electron. 2011, 26, 2896–2905. [Google Scholar] [CrossRef]
- Xiao, X.Y.; Yang, R.H.; Zheng, Z.X.; Wang, Y. Cooperative Rotor-Side SMES and Transient Control for Improving the LVRT Capability of Grid-Connected DFIG-Based Wind Farm. IEEE Trans. Appl. Supercond. 2019, 29, 0600204. [Google Scholar] [CrossRef]
- Jabbour, N.; Tsioumas, E.; Mademlis, C.; Solomin, E. A Highly Effective Fault-Ride-Through Strategy for a Wind Energy Conversion System with a Doubly Fed Induction Generator. IEEE Trans. Power Electron. 2020, 35, 8154–8164. [Google Scholar] [CrossRef]
- Liang, J.Q.; Howard, D.F.; Restrepo, J.A.; Harley, R.G. FeedForward Transient Compensation Control for DFIG Wind Turbines during both Balanced and Unbalanced Grid Disturbances. IEEE Trans. Ind. Appl. 2013, 49, 1452–1463. [Google Scholar] [CrossRef]
- Vrionis, T.D.; Koutiva, X.I.; Vovos, N.A. A Genetic Algorithm-Based Low Voltage Ride-Through Control Strategy for Grid Connected Doubly Fed Induction Wind Generators. IEEE Trans. Power Syst. 2014, 29, 1325–1334. [Google Scholar] [CrossRef]
- Mohseni, M.; Islam, S.M. Transient Control of DFIG-Based Wind Power Plants in Compliance with the Australian Grid Code. IEEE Trans. Power Electron. 2012, 27, 2813–2824. [Google Scholar] [CrossRef]
- Villanueva, I.; Rosales, A.; Ponce, P.; Molina, A. Grid-Voltage-Oriented Sliding Mode Control for DFIG Under Balanced and Unbalanced Grid Faults. IEEE Trans. Sustain. Energy 2018, 9, 1090–1098. [Google Scholar] [CrossRef]
- Lima, F.K.A.; Luna, A.; Rodriguez, P.; Watanabe, E.H.; Blaabjerg, F. Rotor Voltage Dynamics in the Doubly Fed Induction Generator during Grid Faults. IEEE Trans. Power Electron. 2010, 25, 118–130. [Google Scholar] [CrossRef] [Green Version]
- Zhu, R.W.; Chen, Z.; Wu, X.J.; Deng, F. Virtual Damping Flux-Based LVRT Control for DFIG-Based Wind Turbine. IEEE Trans. Energy Convers. 2015, 30, 714–725. [Google Scholar] [CrossRef]
- Zhou, L.Y.; Liu, J.J.; Zhou, S.Z. Improved Demagnetization Control of a Doubly-Fed Induction Generator Under Balanced Grid Fault. IEEE Trans. Power Electron. 2015, 30, 6695–6705. [Google Scholar] [CrossRef]
- Zhou, D.; Blaabjerg, F. Optimized Demagnetizing Control of DFIG Power Converter for Reduced Thermal Stress during Symmetrical Grid Fault. IEEE Trans. Power Electron. 2018, 33, 10326–10340. [Google Scholar] [CrossRef] [Green Version]
- Shen, Y.W.; Ke, D.P.; Qiao, W.; Sun, Y.Z.; Kirschen, D.S. Transient Reconfiguration and Coordinated Control for Power Converters to Enhance the LVRT of a DFIG Wind Turbine with an Energy Storage Device. IEEE Trans. Energy Convers. 2015, 30, 1679–1690. [Google Scholar] [CrossRef]
- Ali, M.A.S.; Mehmood, K.K.; Baloch, S.; Kim, C.H. Modified rotor-side converter control design for improving the LVRT capability of a DFIG-based WECS. Electr. Power Syst. Res. 2020, 186, 106403. [Google Scholar] [CrossRef]
- Din, Z.; Zhang, J.Z.; Zhu, Y.D.; Xu, Z.; El-Naggar, A. Impact of Grid Impedance on LVRT Performance of DFIG System with Rotor Crowbar Technology. IEEE Access 2019, 7, 127999–128008. [Google Scholar] [CrossRef]
- Pannell, G.; Zahawi, B.; Atkinson, D.J.; Missailidis, P. Evaluation of the Performance of a DC-Link Brake Chopper as a DFIG Low-Voltage Fault-Ride-Through Device. IEEE Trans. Energy Convers. 2013, 28, 535–542. [Google Scholar] [CrossRef]
- Zhu, D.H.; Zou, X.D.; Deng, L.; Huang, Q.J.; Zhou, S. Inductance-Emulating Control for DFIG-Based Wind Turbine to Ride-Through Grid Faults. IEEE Trans. Power Electron. 2017, 32, 8514–8525. [Google Scholar] [CrossRef]
- LÓpez, J.; GubÍa, E.; Sanchis, P.; Roboam, X.; Marroyo, L. Wind Turbines Based on Doubly Fed Induction Generator Under Asymmetrical Voltage Dips. IEEE Trans. Energy Convers. 2008, 23, 321–330. [Google Scholar] [CrossRef]
- Zhu, D.H.; Zou, X.D.; Zhou, S.Y.; Dong, W.; Kang, Y.; Hu, J.B. Feedforward Current References Control for DFIG-Based Wind Turbine to Improve Transient Control Performance during Grid Faults. IEEE Trans. Energy Convers. 2018, 33, 670–681. [Google Scholar] [CrossRef]
- Zhu, D.H.; Zou, X.D.; Dong, W.; Jiang, C.C.; Kang, Y. Disturbance feedforward control for type-3 wind turbines to achieve accurate implementation of transient control targets during LVRT. Int. J. Electr. Power Energy Syst. 2020, 119, 105954. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value | Per-Unit |
|---|---|---|---|
| Ps | Rated stator power | 2 MW | |
| Us | Rated stator voltage | 690 V | |
| Is | Rated stator current | 1760 A | |
| fs | Rated stator frequency | 50 Hz | |
| Vbus | Rated DC-bus voltage | 1200 V | |
| p | Poles pairs | 2 | |
| u | Turn ratio (Ns/Nr) | 1/3 | |
| Rs | Stator resistance | 0.026 Ω | 0.0115 p.u. |
| Rr | Rotor resistance | 0.029 Ω | 0.0128 p.u. |
| Lm | Mutual inductance | 2.5 mH | 3.4699 p.u. |
| Lsσ | Stator leakage inductance | 0.087 mH | 0.1208 p.u. |
| Lrσ | Rotor leakage inductance | 0.087 mH | 0.1208 p.u. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Liu, J.; Zhou, M.; Li, C.; Lv, Y. Double Impedance-Substitution Control of DFIG Based Wind Energy Conversion System. Energies 2022, 15, 5739. https://doi.org/10.3390/en15155739
Zhang Y, Liu J, Zhou M, Li C, Lv Y. Double Impedance-Substitution Control of DFIG Based Wind Energy Conversion System. Energies. 2022; 15(15):5739. https://doi.org/10.3390/en15155739
Chicago/Turabian StyleZhang, Yu, Jiahong Liu, Meilan Zhou, Chen Li, and Yanling Lv. 2022. "Double Impedance-Substitution Control of DFIG Based Wind Energy Conversion System" Energies 15, no. 15: 5739. https://doi.org/10.3390/en15155739
APA StyleZhang, Y., Liu, J., Zhou, M., Li, C., & Lv, Y. (2022). Double Impedance-Substitution Control of DFIG Based Wind Energy Conversion System. Energies, 15(15), 5739. https://doi.org/10.3390/en15155739