1. Introduction
With the development of power electronics and control theory, and the increasing demands of higher precision and higher performance existing in practical industrial applications [
1], the speed regulation systems for permanent magnet synchronous motors (PMSMs) have been extensively receiving much more attention [
2]. PMSMs are characterized by many excellent features such as high efficiency, high power/weight ratio, low noise, and maintenance-free capability [
3]. Generally speaking, the field orientation control (FOC) methodology, namely the vector control approach, is recommended in a high-performance PMSM servo system [
4]. Under this scheme, the torque- and flux-producing components of the stator current are completely decoupled and separately controlled, such that the PMSMs achieve similar performances as the DC motors [
5]. It is well known that the mathematical model of a PMSM is a nonlinear, high-order, and strongly coupling multi-variable system [
6]. At the same time, there usually exist friction force, external load disturbance, and internal parameter uncertainties/perturbations in the complex operation environments, which will severely deteriorate system dynamic performances [
7]. To this end, the investigation of controller design for PMSMs has important significance.
Many researchers have devoted themselves to exploring innovative approaches for motion control systems (see [
8,
9,
10,
11,
12,
13,
14,
15,
16] and the references therein). The classical linear control method, for example, the proportional–integral (PI) controller, is widely adopted and benefits from the gain parameters being easily determined and adjusted [
8]. However, this method cannot provide a satisfactory performance. Consequently, many advanced nonlinear control technologies have been presented with the development of modern control theory, resulting in improved system robustness [
9]. In [
10], a two degree of freedom (DOF) robust
control method was adopted in a motor speed regulation system, where a disturbance observer feedforward compensation-based composite control structure was designed to improve the dynamic performance of the system. Based on statistical model interpretation, Ji et al. [
11] proposed a robust model reference adaptive control (MRAC) strategy to solve the current loop adjustment problem for PMSMs. As a PMSM is usually influenced by external load torque and unmodeled dynamics during operation, an extended state observer (ESO) was designed to derive its estimated value, and the backstepping control algorithm was applied to the position tracking problem [
12]. Active disturbance rejection control (ADRC) acts as a high-performance motor drive technology, and has been widely using in recent years [
13]. The discrete-time repetitive controller was embedded in the designed ADRC [
14], which was employed to compensate the AC disturbances and suppress the DC disturbances, respectively. Based on the conventional finite control set model predictive control (MPC), an improved MPC method for PMSM drive systems was presented in [
15]. The gain parameters for controllers can be determined by setting different fuzzy logic membership functions [
16], and thus improving the adaptive ability for PMSM speed regulation systems and the robustness against uncertainties. A novel reaching law-based sliding mode control (SMC) method was implemented in [
17], where an extended sliding mode disturbance observer was also proposed to directly estimate the lumped uncertainties. It is worth mentioning that the abovementioned approaches have improved PMSM drive system performance in different aspects, and the observer feedforward compensation-based composite control strategy has become one of the most popularly used schemes for PMSM systems.
It should be emphasized that the disturbance observer (DO) is also an alternative and effective way to produce the estimation value of the external load torque (see [
10,
18,
19,
20] and the references therein). For example, the abovementioned
-based DO was presented as a feedforward compensation method [
10]. A generalized proportional integral observer (GPIO) was firstly introduced to estimate the lumped disturbance in [
18], and then the compensation estimation was incorporated into a super-twisting SMC law. For a PMSM servo drive system influenced by the lumped disturbance [
19], a super-twisting sliding mode observer (SMO) was presented to estimate and compensate for the external disturbances, parametric uncertainties, unmodeled dynamics, etc. By eliminating the current control loop [
20], an adaptive radial basis function (RBF)-based neural network observer was proposed to design the voltage control laws. However, the DO-based method involves the inverse dynamics of the controlled plant [
2], which are highly dependent on the model information. Meanwhile, the upper bounds of the lumped disturbance and/or its differential are necessary to construct an available DO [
21]. Therefore, in order to guarantee the convergence performance of the error estimation system, a conservative upper bound will usually be employed. Fortunately, the ESO considers the lumped disturbances as a new state variable, thus resulting in a feedforward compensation value for the designed feedback control law. The ESO can obtain accurate estimations regardless of the specific form and information of the lumped disturbances. As mentioned in [
13], the ADRC technology is one of the most commonly used approaches in PMSM servo systems, while the conventional ADRC strategy mainly comprises a tracking differentiator (TD), the abovementioned ESO, and a state error feedback control law. It is worth mentioning that an appropriate TD can arrange a smoothly transitional reference signal for the PMSM speed regulation systems, thus improving the tracking performance. On the other hand, an additional DOF can be provided by employing the nonlinear combination [
22], which will promote the system performance while maintaining the advantages of the synthesized linear controller. However, as mentioned in [
13], most existing ADRC technologies have some drawbacks, mainly caused by difficult multi-parameter adjustments. Thus, the Fibonacci sequences are presented to determine the design parameters [
23].
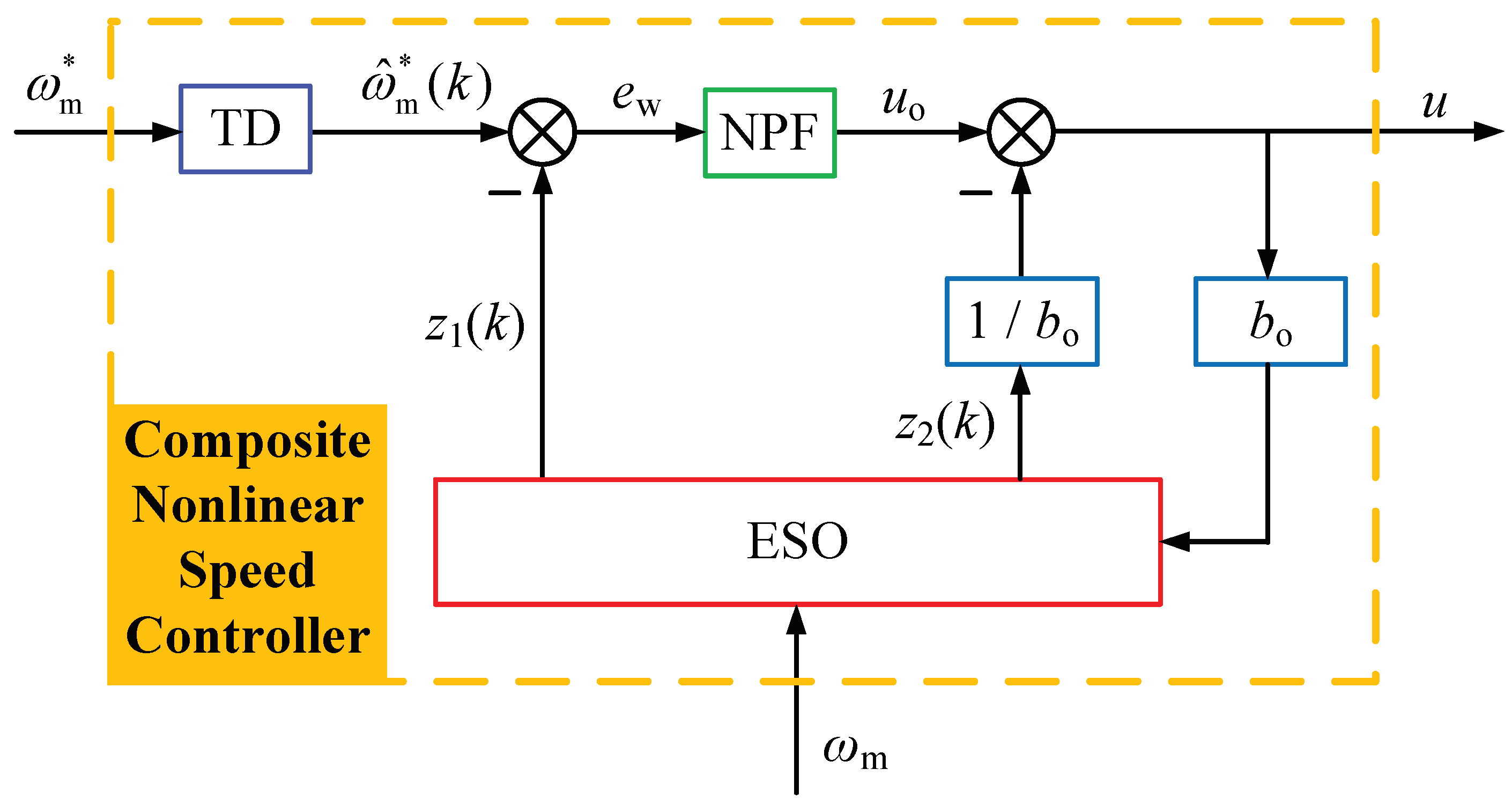
Motivated by the abovementioned discussions, this paper considers the problems of the composite nonlinear control for PMSM speed regulation systems with disturbances. By taking the parametric perturbations and external disturbances into account, a novel linear ESO is firstly designed and analyzed to estimate the lumped disturbance, such that the speed regulation system possesses strong anti-disturbance performance. Meanwhile, the estimation of system state is also performed. Then, an optimal control synthesis function-based TD is constructed, arranging the transition dynamic for the reference velocity value, while obtaining effective differential signals in noisy environments. Furthermore, the composite nonlinear scheme is synthesized by incorporating the ESO-based estimate values into nonlinear proportional feedback (NPF) control law. Finally, the advantages and effectiveness of the proposed methods are demonstrated by simulation results. The main contributions of this study can be summarized as follows. (1) The parametric perturbations and external disturbances characterized by lumped disturbance are fully taken into account during the construction of an improved linear ESO, which is free of the a priori disturbance information. In addition, although the nonlinear ESO with fal(·) function may be popularly employed as a feedforward compensation method [
13], which suffers from the parameter determinations of ESO feedback gains by artificial experience of trial and error [
22]. To this end, the presented linear ESO (in this study) is an alternative effective approach to obtain accurate estimate values. Furthermore, the strictly theoretical result is given to analyze the convergence domain, while providing the guidelines to choose the appropriate parameters by adopting the eigenvalue placement technique. (2) An optimal control synthesis function-based TD is employed, resulting in a favorable transition dynamic for the reference velocity value, while its high-quality differential signal is simultaneously obtained. (3) The composite nonlinear control law is synthesized by combining the ESO-based feedforward compensation and NPF feedback controller. Benefitting from the adaptive gain adjustment, the presented control strategy can guarantee satisfactory system performance with the strong robustness against the lumped disturbances. In addition, it should be emphasized that, here, only proportional action is involved to reduce the complexity of the control algorithm and the corresponding burden of parameter determinations.
The rest of this paper is organized as follows. In
Section 2, system modeling and preliminaries are described. The main results are given in
Section 3, including the design and analysis of the composite nonlinear control approach. Some simulation results are given in
Section 4.
Section 5 concludes this paper.
2. System Modeling and Preliminaries
The general dynamic model of a PMSM is given as follows [
10], which can be established with respect to a two-phase synchronous rotating orthogonal
reference coordinate system,
where
and
represent
d and
q axis stator voltages, respectively;
is stator resistance;
and
denote
d and
q axis stator currents, respectively;
and
are
d and
q axis stator inductances, respectively;
is the flux linkage of permanent magnets;
is the electromagnetic torque;
is the number of pole pairs;
J is the moment of the rotational inertia;
represents the load torque disturbance;
F is the viscous friction coefficient;
and
are electrical and mechanical angular velocities, respectively, which satisfy
.
For simplicity, we consider surface-mounted PMSMs in this paper, which are characterized by
. As a result, we can obtain the simplified mathematical model of a PMSM, comprising the following electrical dynamics:
and mechanical dynamic equation
where
is the electromagnetic torque coefficient.
The research objective of this study is to design a novel composite nonlinear controller for a PMSM speed regulation system, resulting in:
(1) The currents
and
should track their references
and
, respectively. That is to say,
where the
d axis reference current
.
(2) The mechanical angular velocity
should be regulated to its reference velocity value
in the presence of the lumped disturbance, namely,
Remark 1. According to the electrical dynamic Equation (5), it is possible to effectively control the currents with a PI controller. Motivated by the internal model control (IMC) theory [3], if the nonlinear cross-coupling back electromotive forces (EMFs) are eliminated for the nominal system, the transfer function will be equivalent to an inertia element with the electrical time constant. To this end, if a bandwidth of inner loop is chosen, then the controller gains can be easily determined as and , respectively. In addition, it should be mentioned that the gradient descent-based adaptive parameter adjustment method was presented for the proportional integral derivative (PID) controller [8], and the resulting design scheme has been demonstrated to possess superior control performance. In the following, we will primarily concentrate on the design and analysis of the outer loop controller in the conventional cascade scheme. If the approximation error between the
and the speed loop output is considered, then mechanical dynamic Equation (
6) can be modeled as
where
is the system parameter for the eventual composite nonlinear control
;
is the lumped disturbance that needs to be estimated by the subsequent designed ESO;
is the
q axis current error.
4. Simulation Results
In this section, a PMSM is studied to demonstrate the effectiveness and advantages of the proposed approach, whose specification parameters are listed in
Table 1.
In addition, the DC-link capacitor voltage for the three-phase inverter and the pulse width modulation (PWM) frequency are set as
and
, respectively. For the current control loop, once the bandwidth
Hz is chosen, the controller gains can be easily obtained as Remark 1. That is to say,
and
, respectively, where the current output saturation magnitude values are selected as
. Meanwhile, the design parameters of the composite nonlinear speed controller are listed in
Table 2. In addition, the speed output saturation magnitude values are selected as
. It should be emphasized that we built the overall control block diagram in
Figure 2 and carried it out based on Remark 1, where the
d and
q axis back EMFs are ignored. It is recommended to develop the EMF compensation method, such that the whole system performance will be further improved.
It is worth mentioning that when the ESO gain parameters are selected as in
Table 2, the characteristic polynomial (15) can be easily calculated as
, which results in Re(
) < 0. According to the classical automatic control principle, a large-amplitude real part of the eigenvalue will accelerate the estimation convergence velocity. On the other hand, if we set the matrix as
for the presented Theorem 1, and by solving the corresponding Lyapunov Equation (
16), the following positive definite matrix can be obtained:
where its eigenvalues are 0.2929 and 1.7071, respectively. As a result, the stability condition is guaranteed. Meanwhile, a rough differential upper bound
M-based convergence domain (19) will be subsequently derived.
Firstly, when we select the proportional gain as
, the evolutions of nonlinear function
and adaptive parameter
with proportional gain
are as shown in
Figure 3.
From
Figure 3, it can be seen that the function
is smooth with respect to the velocity tracking error
, which is assumed to linearly range from
to
. In addition, when the
is relatively large, the enlarged proportional parameter
can generate a great correction to improve the tracking performance. On the contrary, a decreasing
emerges to reduce the overshoot as the error diminishes. Benefitting from the adaptive gain adjustment, the presented NPF exhibits rapid transient response while possessing small overshoot characteristics.
In order to demonstrate the effectiveness of the presented methods, we set the reference velocity value
as a step signal, which changes from 30 rad/s to 80 rad/s at 0.2 s. When the different values of velocity factor
r are determined, the output signals of the presented TD (22) are as shown in
Figure 4. It can be concluded from
Figure 4 that a large speed factor will accelerate the transition tracking dynamic, while a bigger acceleration amplitude will be produced.
Meanwhile, when the specific values listed in
Table 2 are selected to perform the presented method, the velocity estimation
together with its differential signal
are as shown in
Figure 5, which reveal that the proposed TD (22) can arrange a favorable transition dynamic, while its high-quality differential signal has the perfect noise-filtering performance.
Under the NPF-based composite nonlinear speed controller, and the zero initial conditions for all state variables, the velocity response
and its corresponding ESO-based estimation value
are as shown in
Figure 6.
In order to illustrate the speed regulation system robustness against the lumped disturbance
, and analyze the ESO-based estimation characteristic, an external load torque
with step disturbance that suddenly varies from 2 N·m to 5 N·m at 0.4 s is employed. Meanwhile, for the sake of exploring the steady-state estimation performance, a low-pass filter (LPF) with the cutoff frequency set as 60 Hz is adopted to filter the high-order harmonics existing in
. As a result, the lumped disturbance
with the designed ESO-based estimate signal
is as shown in
Figure 7.
It can be concluded from
Figure 6 and
Figure 7 that the presented ESO (20) can precisely estimate the system state and lumped disturbance, simultaneously. In addition, benefitting from the adaptive parameter adjustment of NPF (24) and the active feedforward compensation, the velocity tracking performance is characterized by short response times, small overshoot and steady-state error, etc. Meanwhile, by comparing
Figure 5 with
Figure 6, it can be summarized that the PMSM regulation system under the eventual composite nonlinear speed controller (27) has strong robustness to the lumped disturbances, where the velocity fluctuations are within
rad/s. In [
5], the speed fluctuation index and recovery time were introduced, for which the best existing results can be listed as follows: the smallest speed decrease and fluctuation were 9 rpm and 3.875 rpm, respectively. By considering the operation speed (1000 rpm), the corresponding percentages can be easily calculated as 0.9% and 0.3875%, respectively. To this end, we define an error as
for the PMSM speed regulation, and its evolution curve is shown as
Figure 8. It can be concluded from
Figure 8 that the motor velocity
can rapidly converge its reference signal
and quickly recover to the steady state in the presence of suddenly varied disturbance. It should be emphasized that the velocity fluctuation percentage is less than 0.2%. In addition, the biggest velocity decrease is about 0.4 rad/s, which results in a corresponding percentage of 0.5%. In summary, the velocity decrease and fluctuation percentages of the presented method are all less than existing results.


 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}