
Criticalities of the Outdoor Infrared Inspection of Photovoltaic Modules by Means of Drones †


Abstract
:1. Introduction
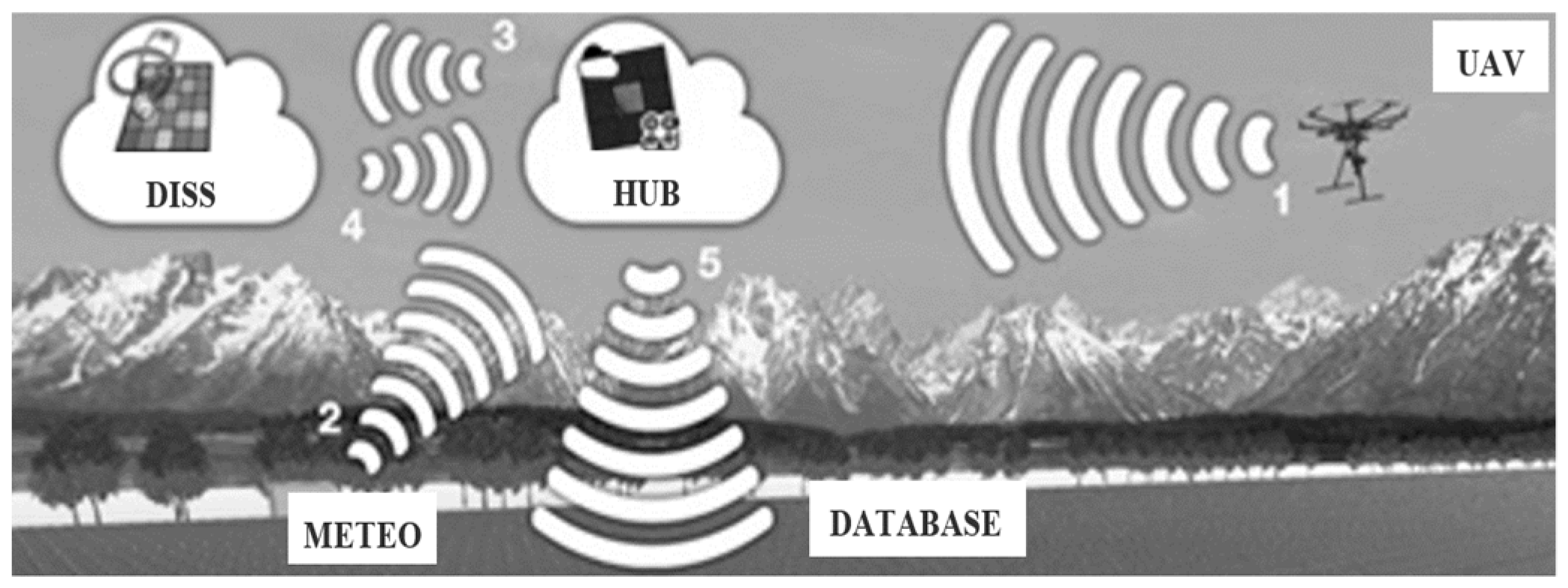
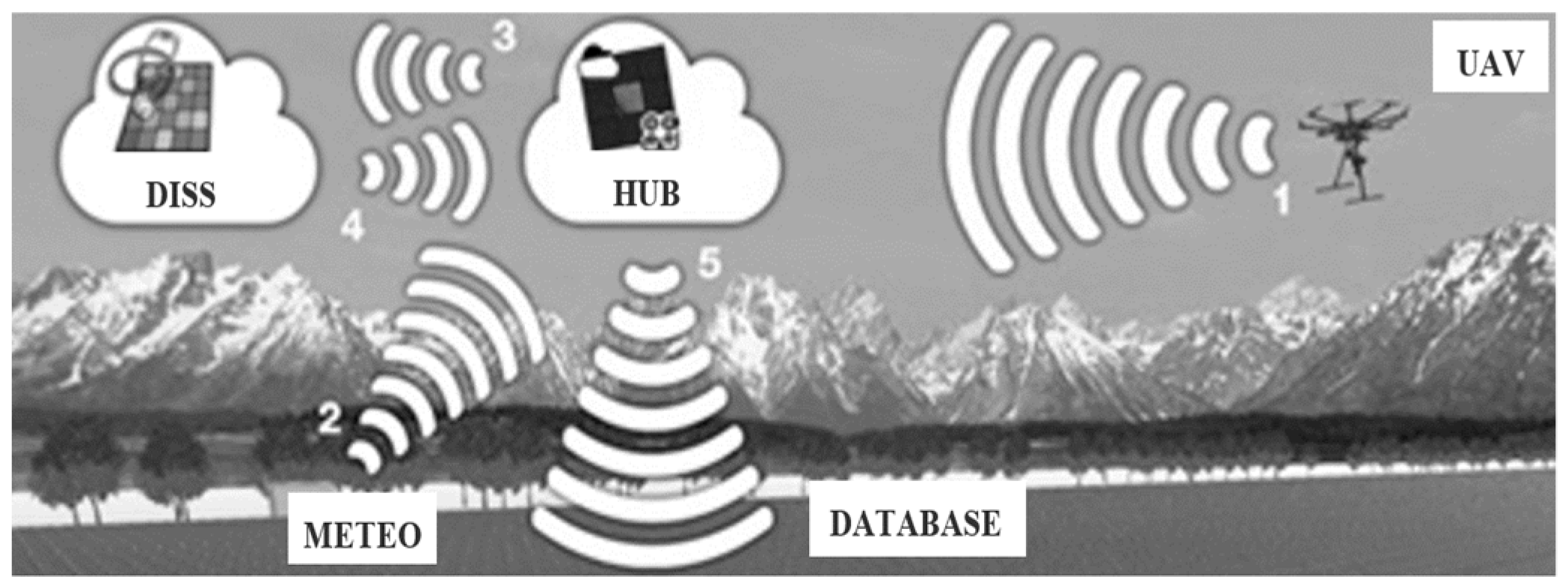
2. Cloud-Based Platform for IR Analysis of Photovoltaic Modules
3. Methodology for the Reliable IR Inspection of a PV Module with a UAV
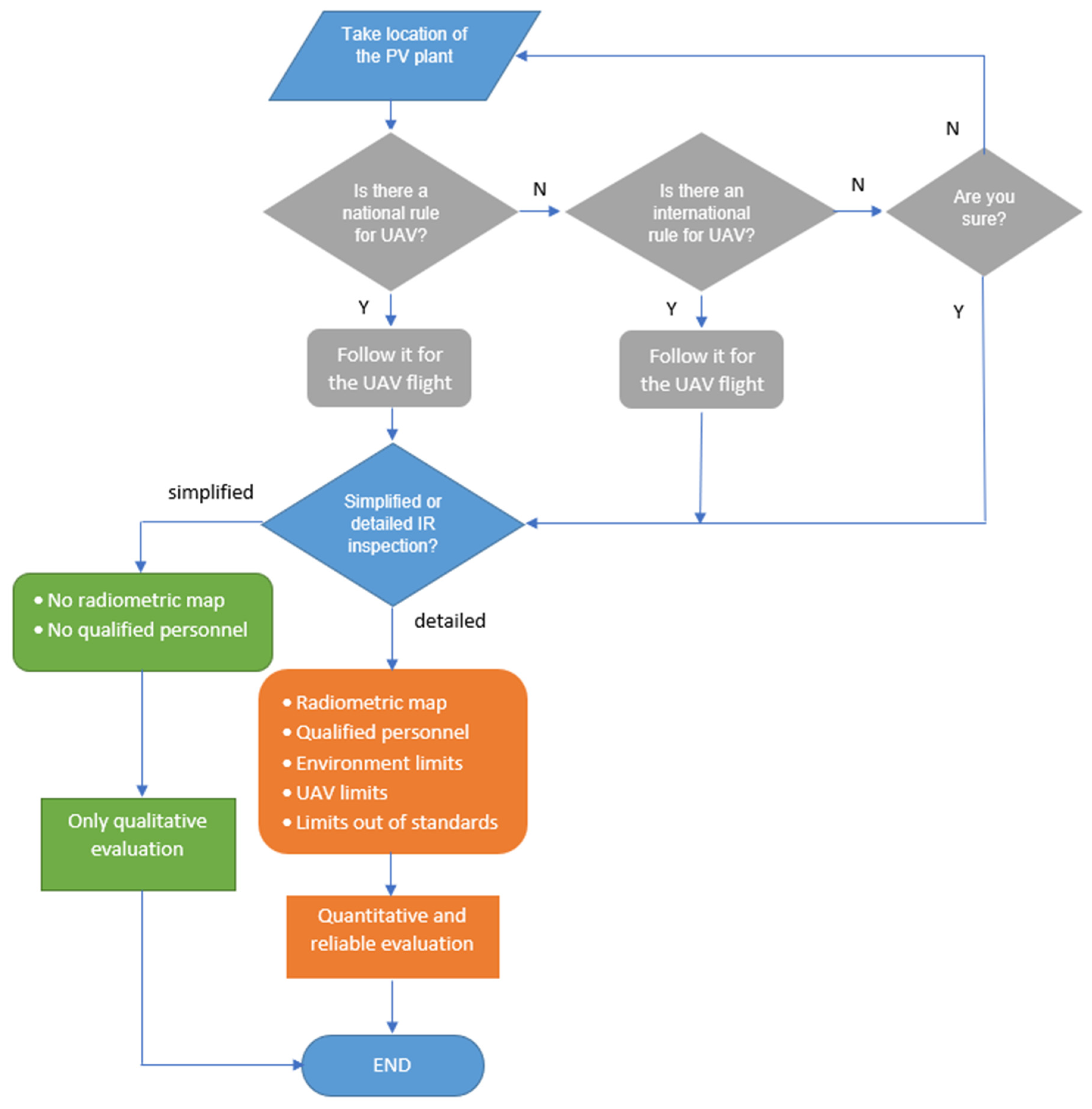
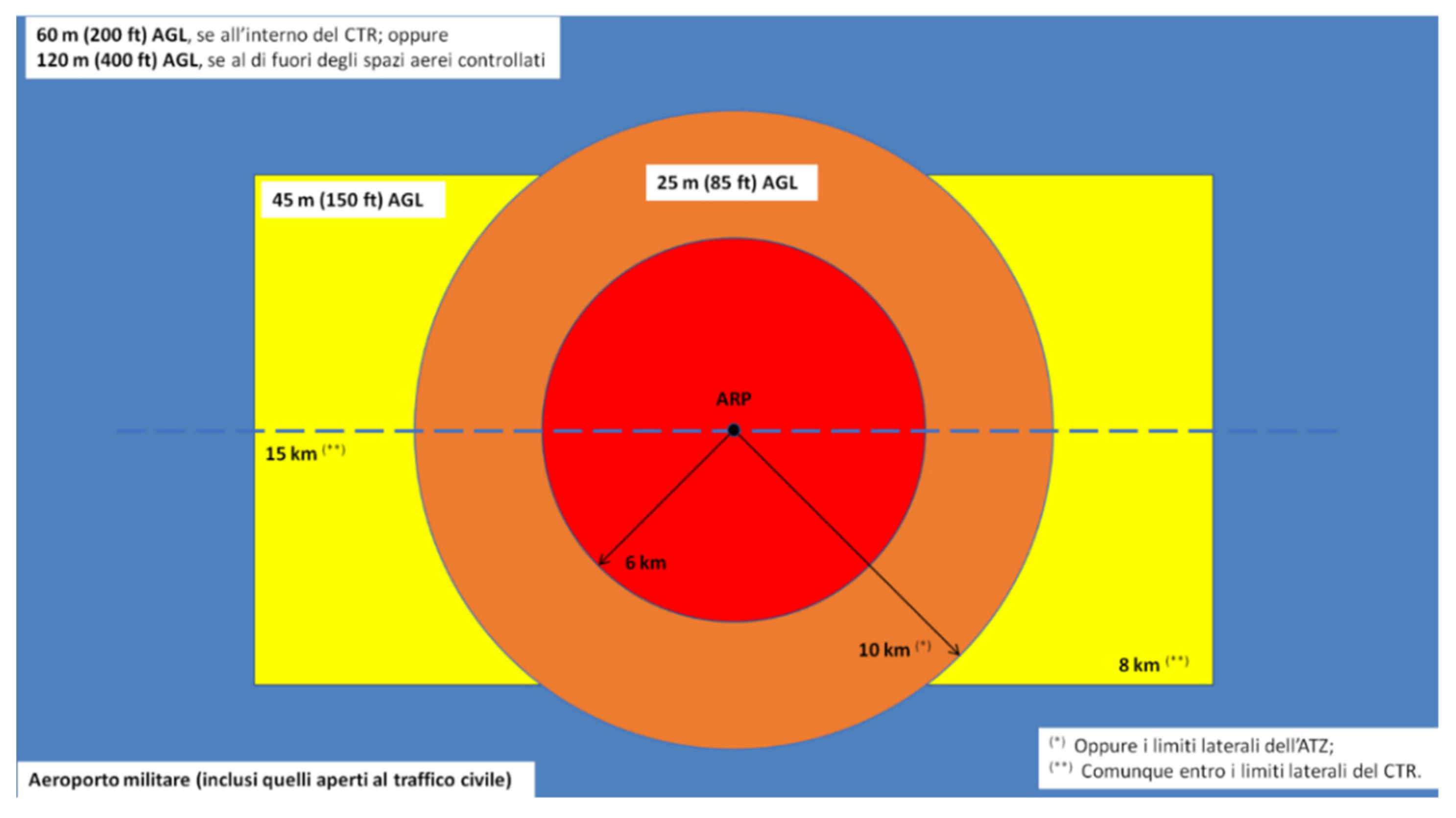
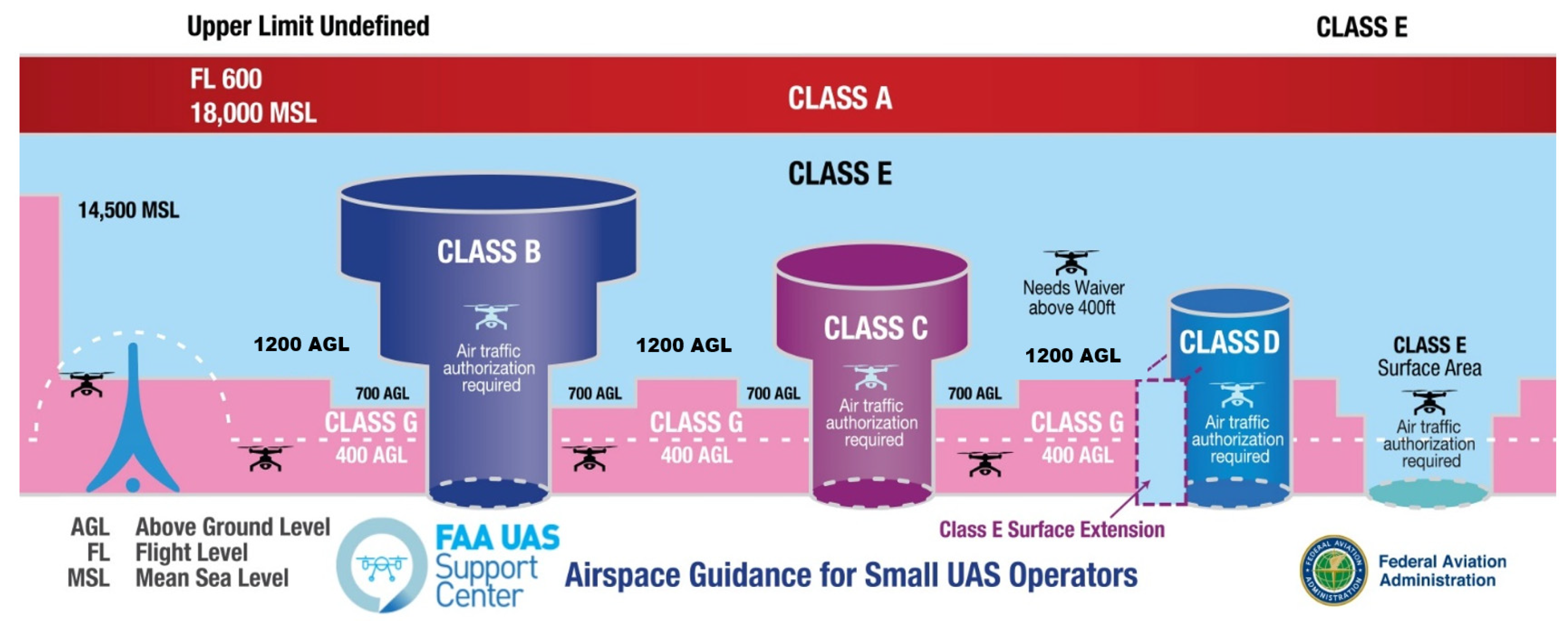
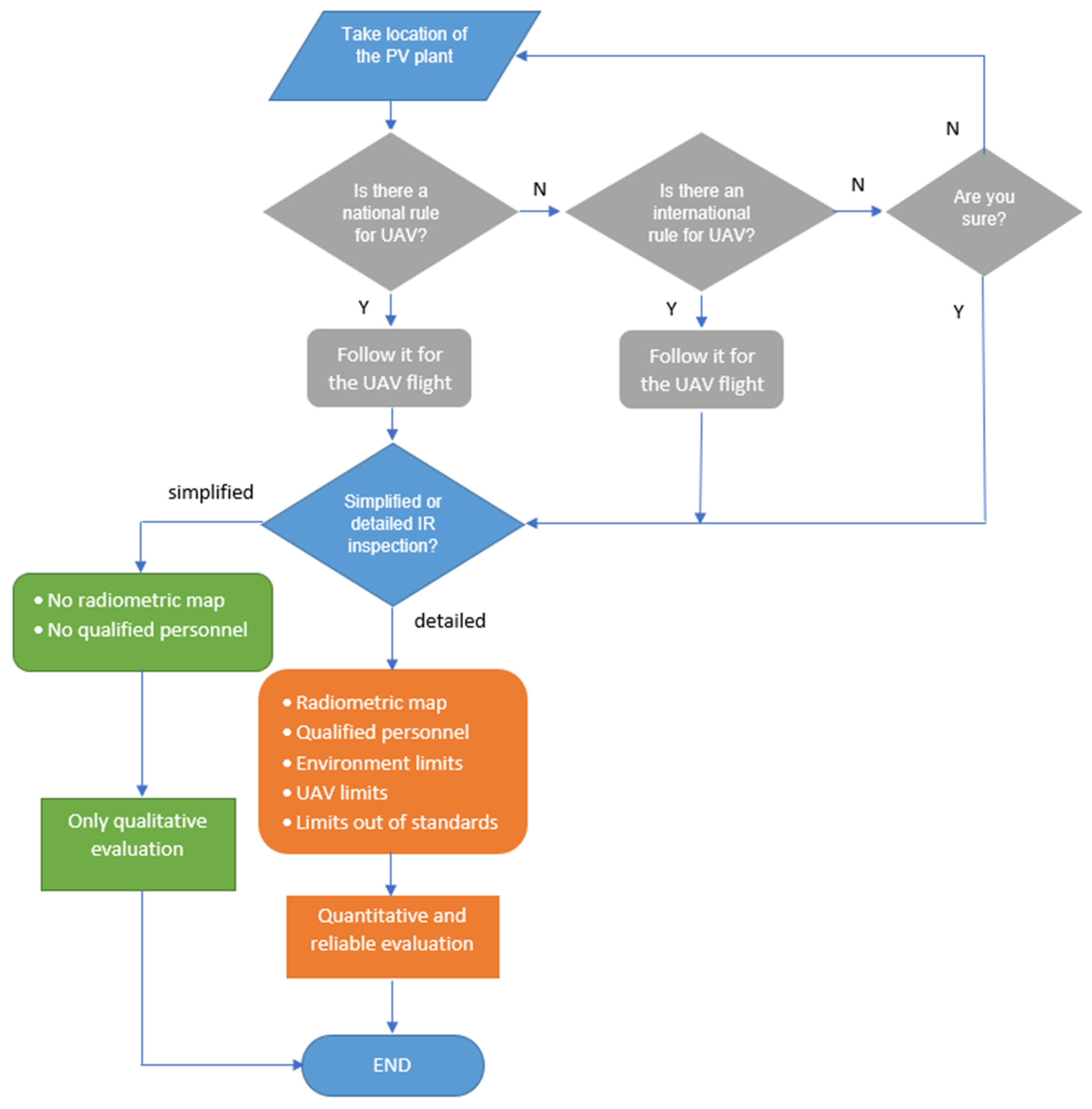
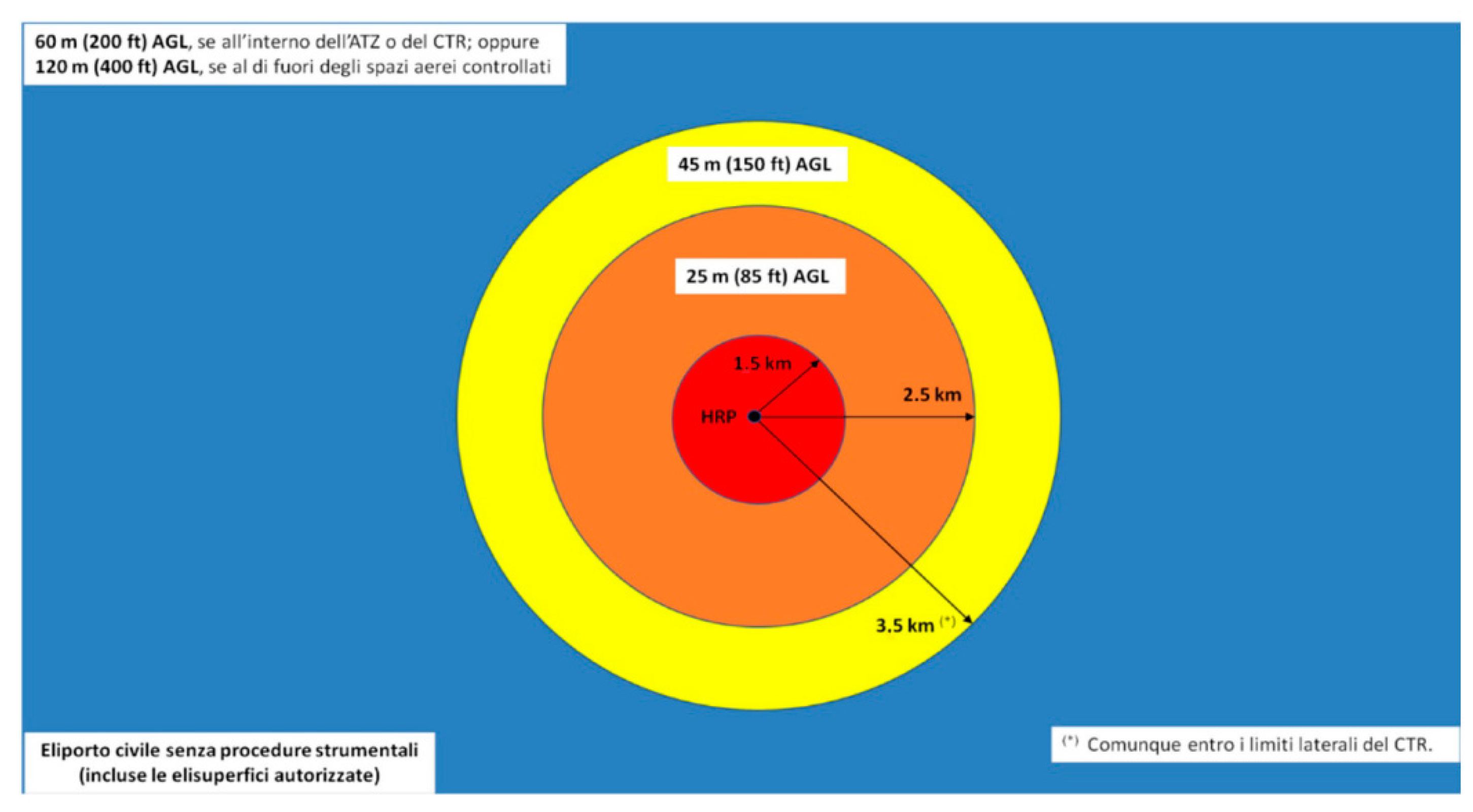
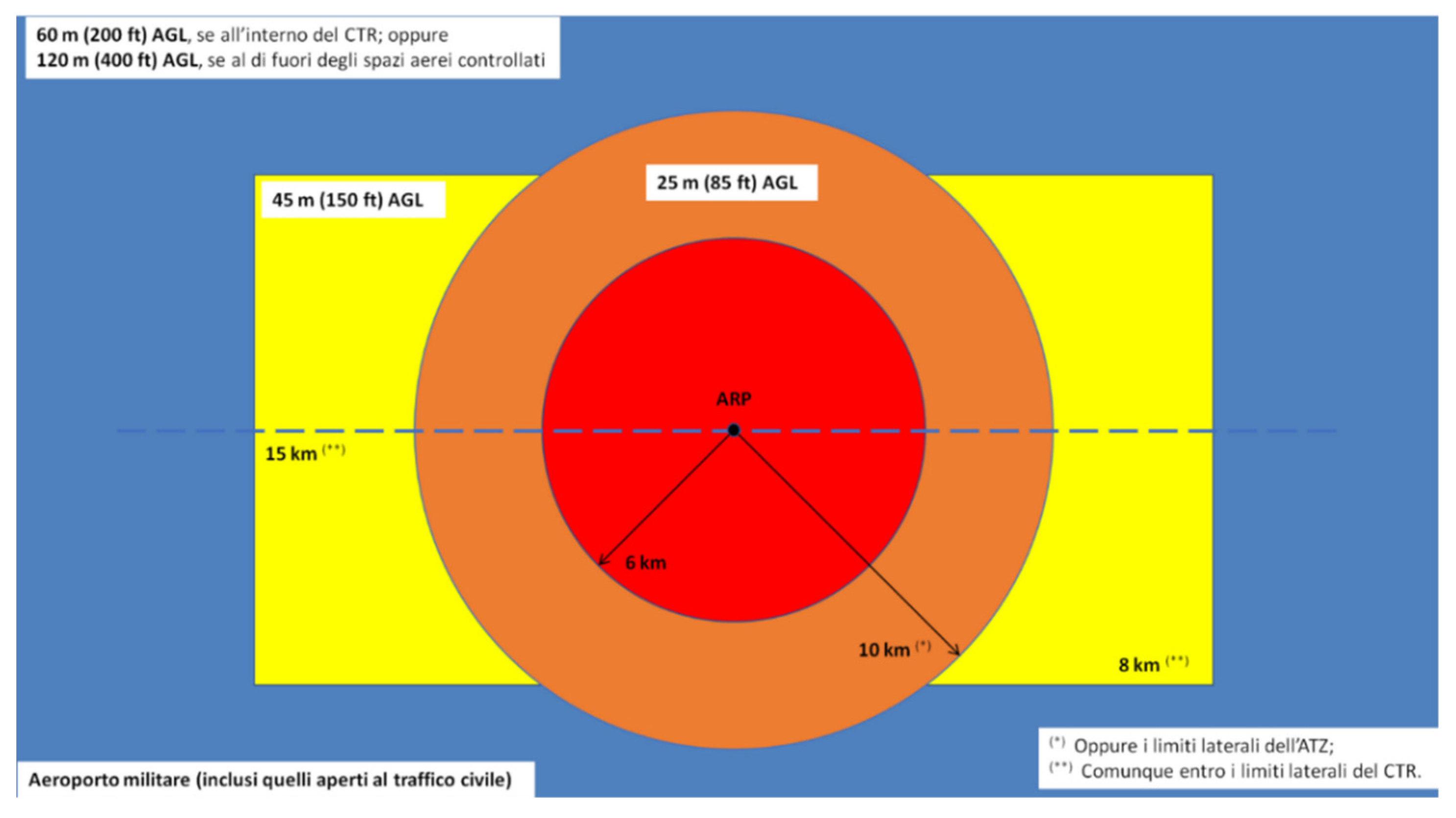
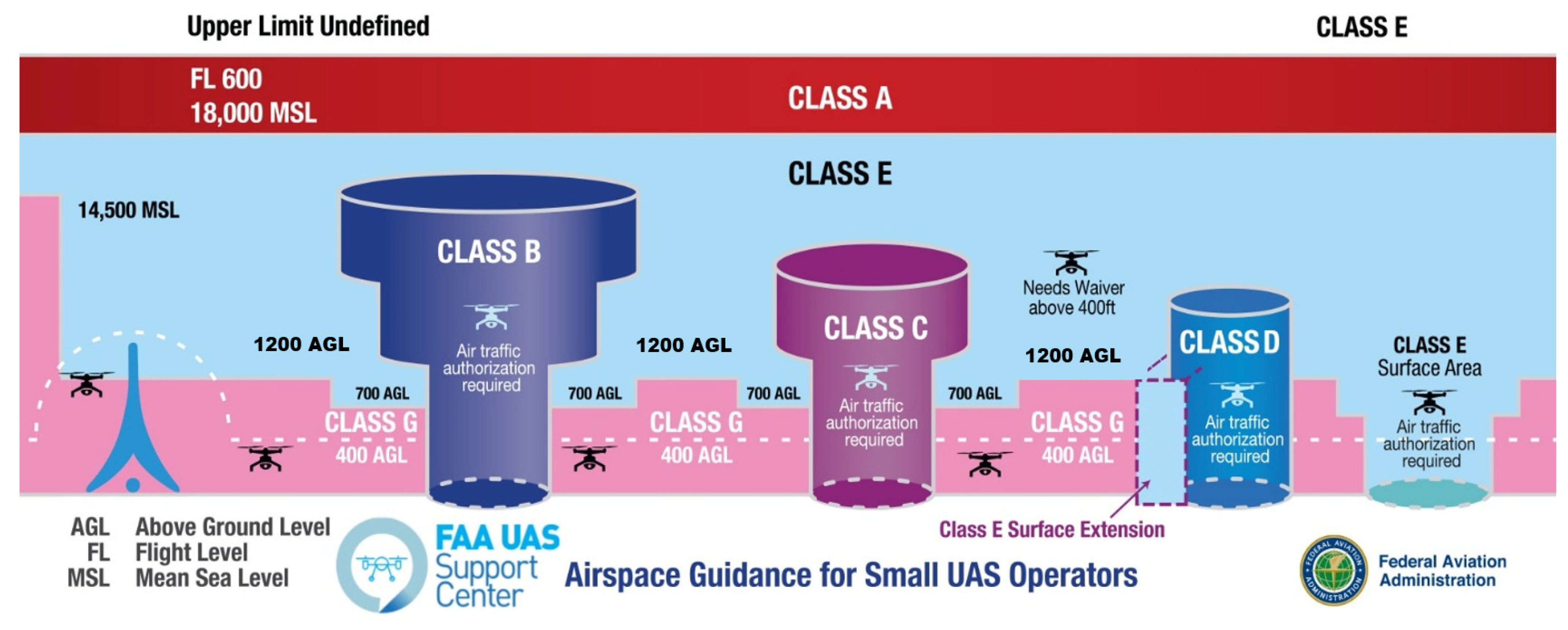
3.1. Different Countries, Different Rules for UAVs
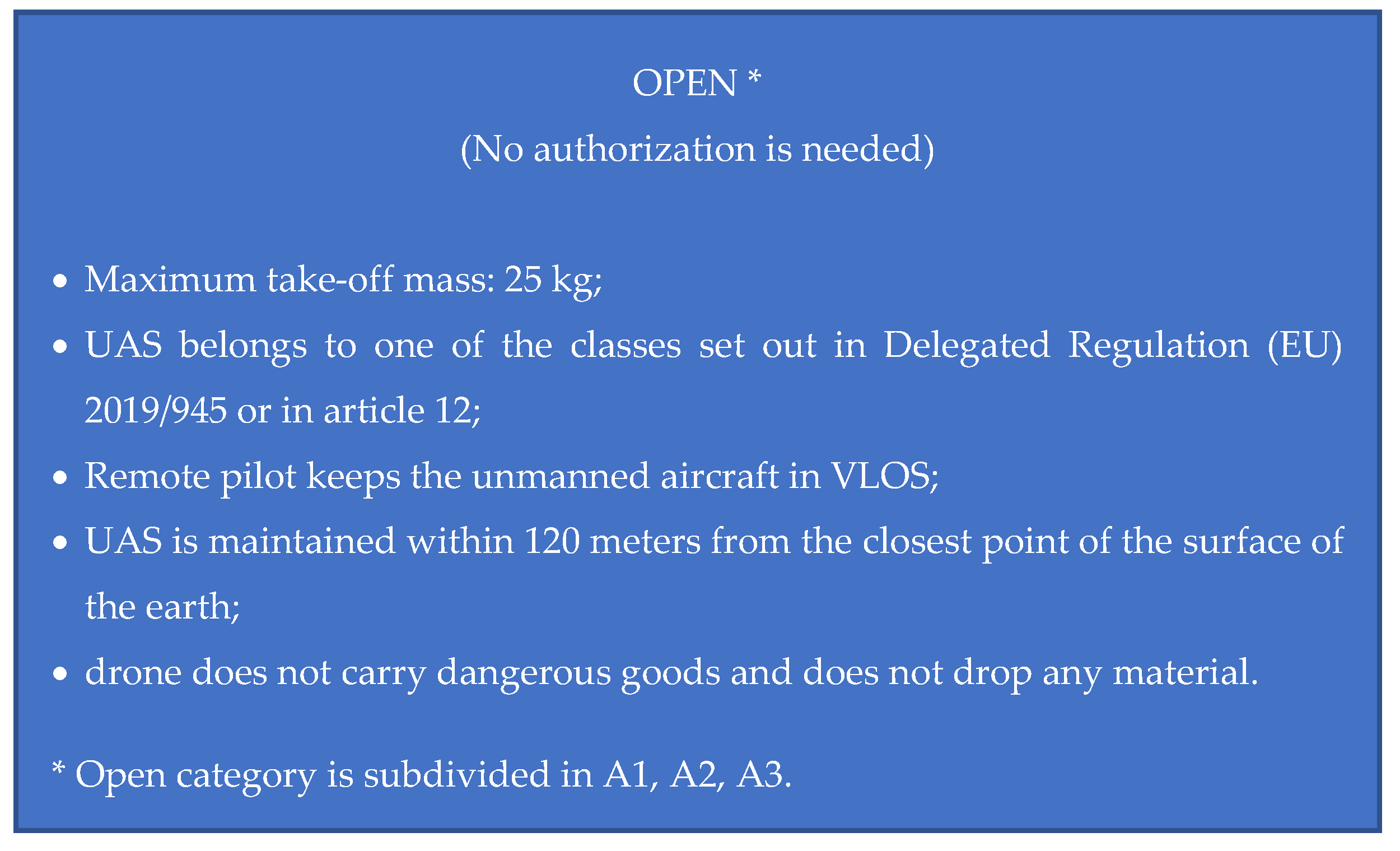
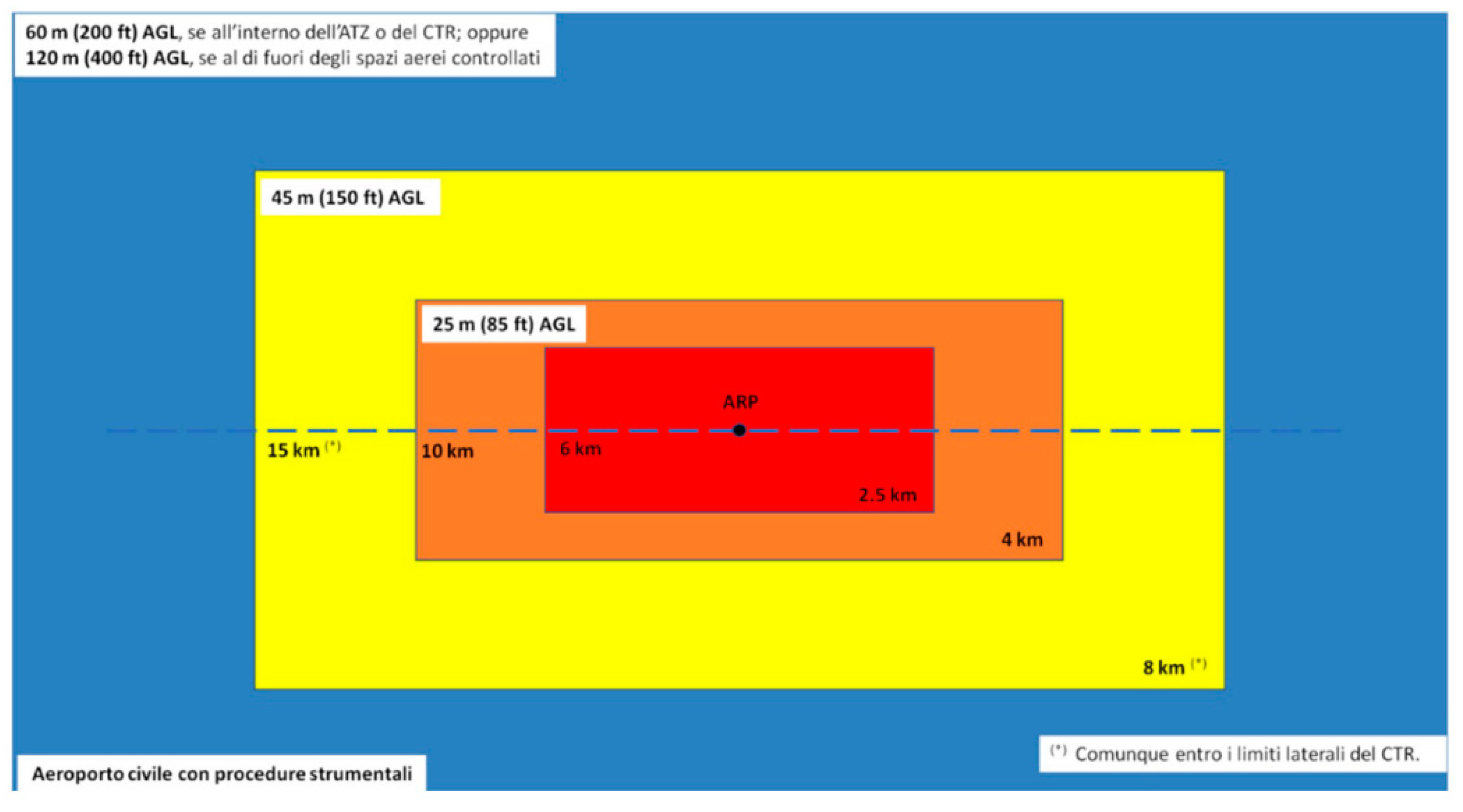
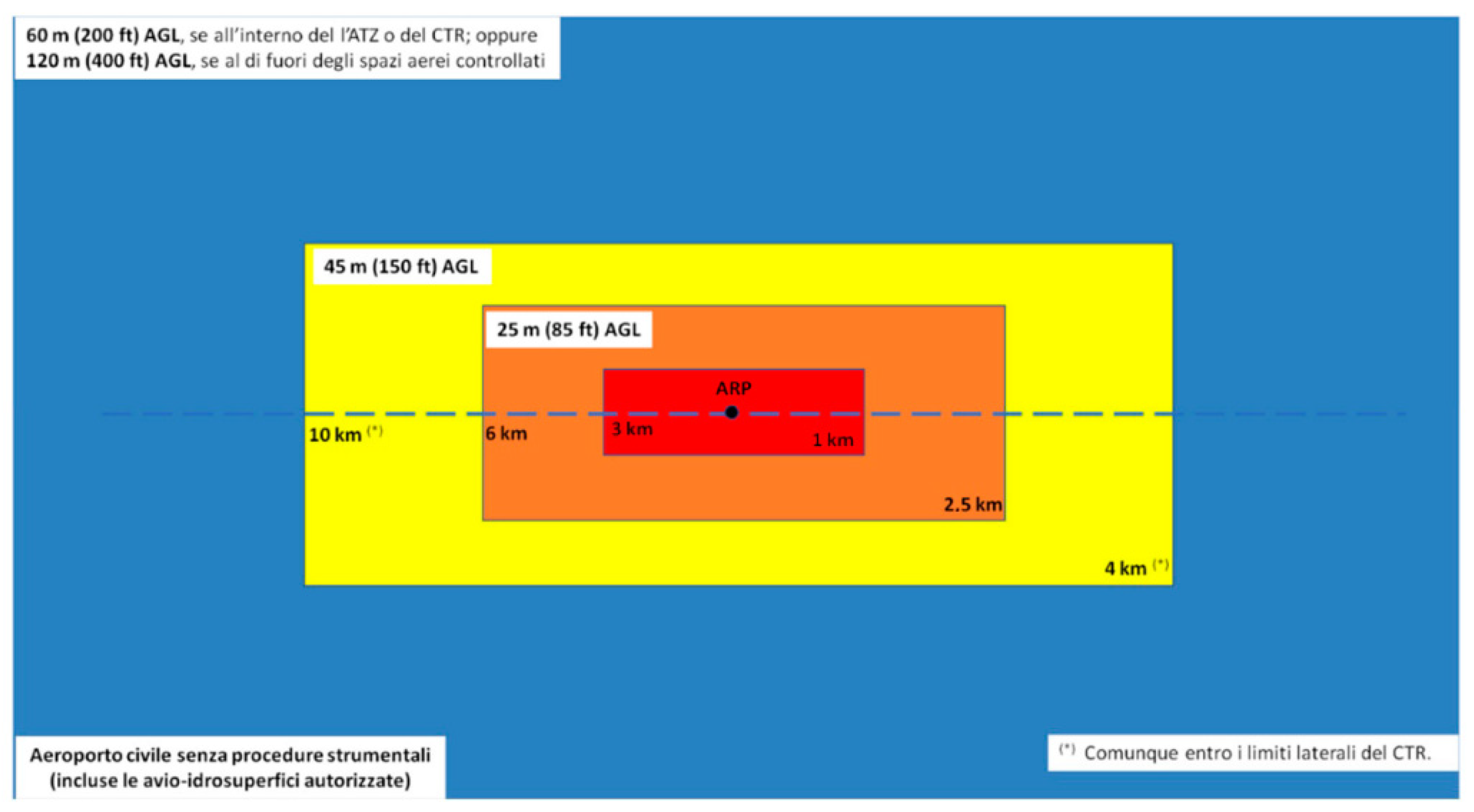
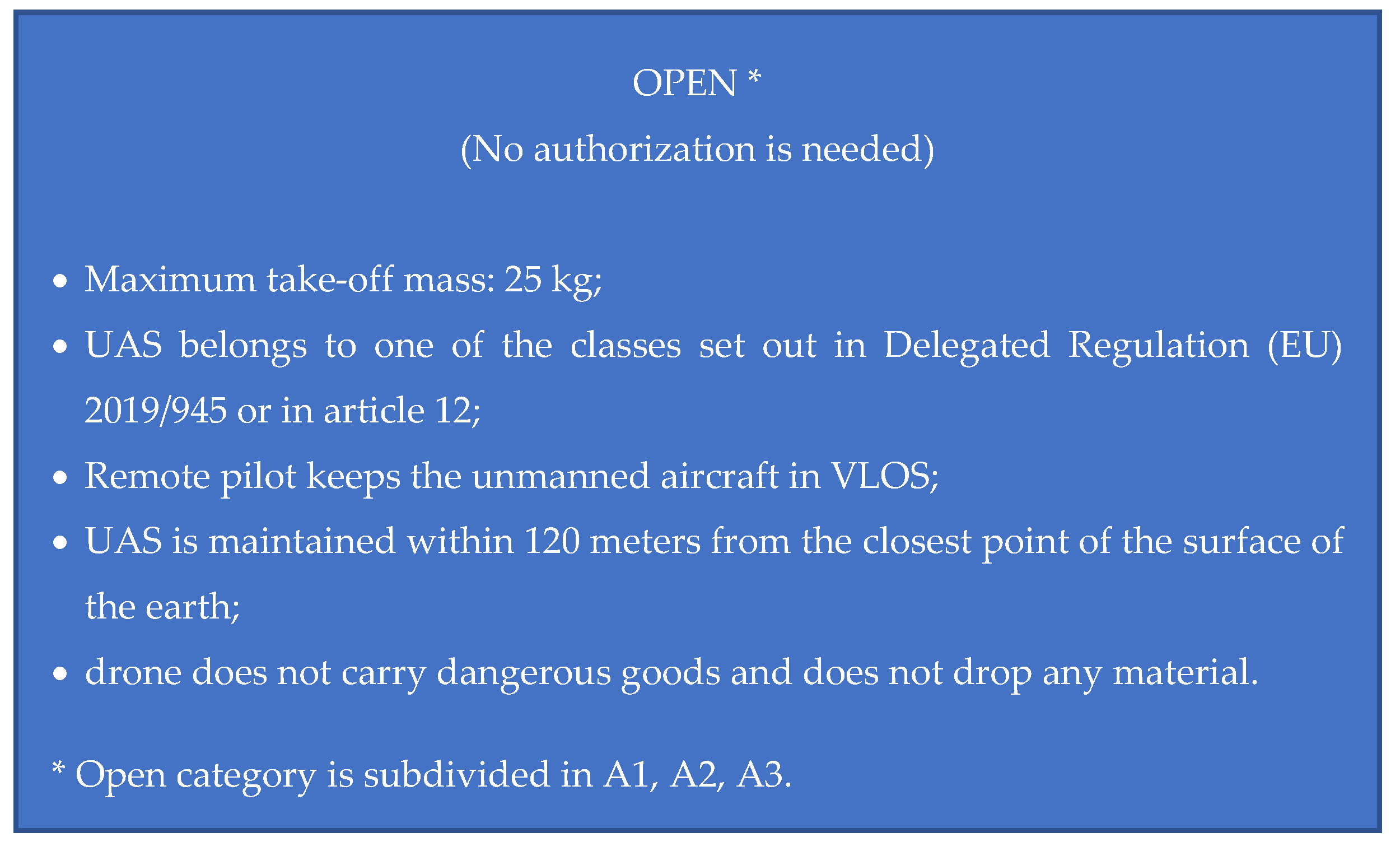
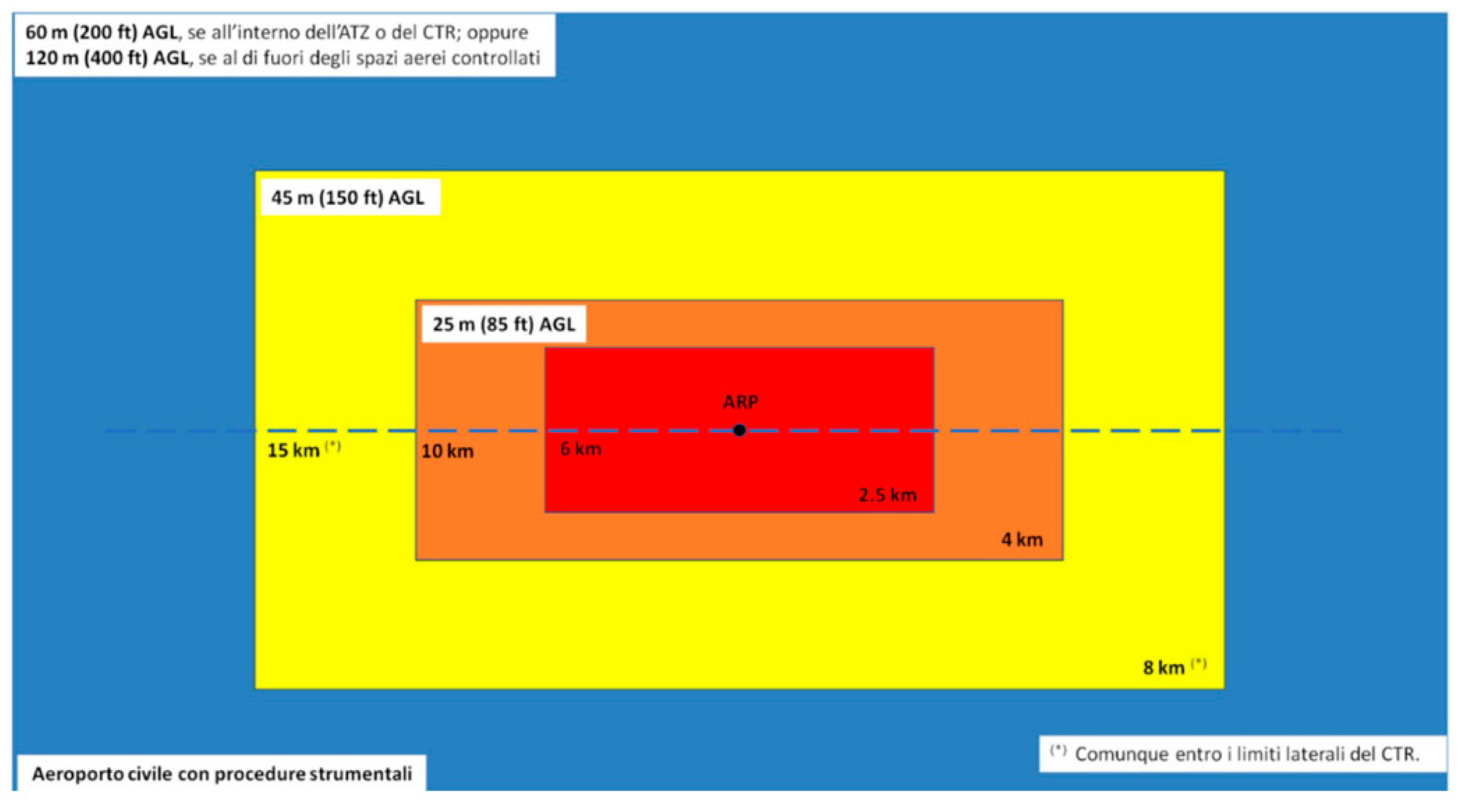
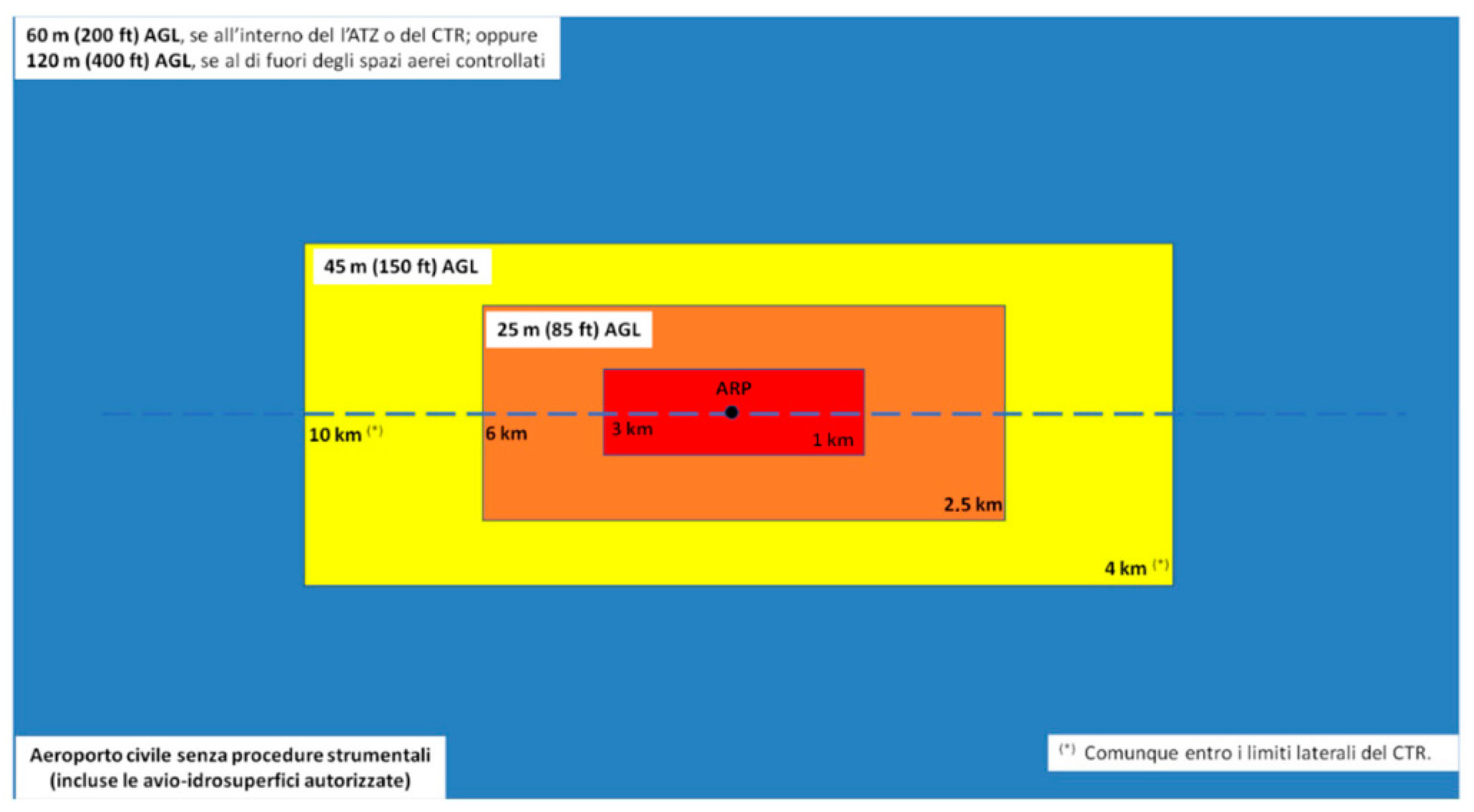
- The open category addresses the operations in the lower risk bracket because the drone operator complies with the relevant requirements for its intended operation. No authorization is required for the open category because the risks in the ‘open’ category are considered low (Figure 4). The open category is divided into subcategories called A1, A2, and A3 based on the Maximum Take Off Mass (MTOM) of the UAV:
- ○
- A1 for an MTOM < 250 g with no pilot competence or an MTOM < 900 g with pilot competence.
- ○
- A2 for an MTOM < 4 kg with pilot competence of a higher level than that requested for the A1 category.
- ○
- A3 for an MTOM < 25 kg with pilot competence equal to that of the A1 category but requesting a safe distance from people, buildings, and infrastructure.
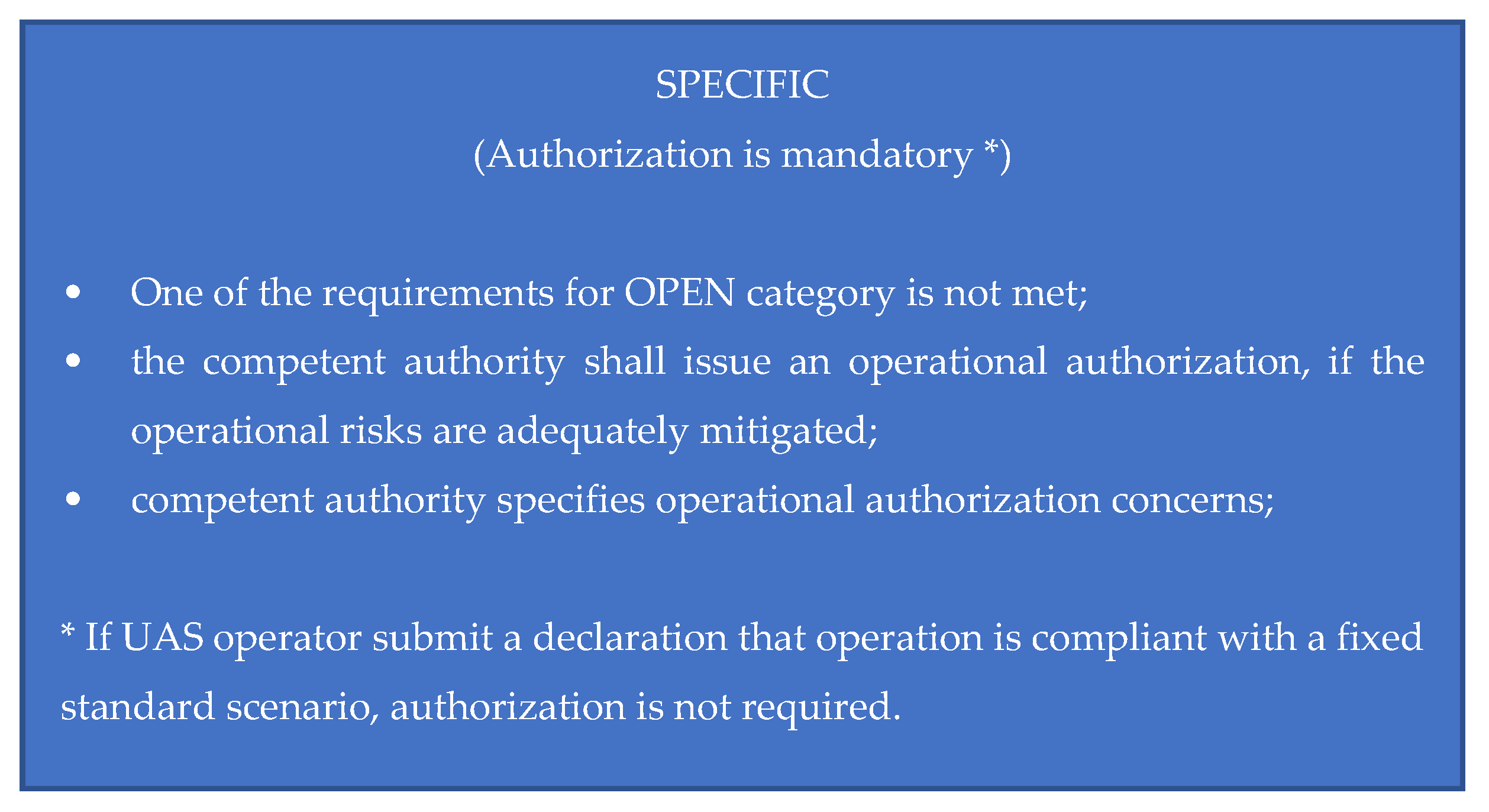
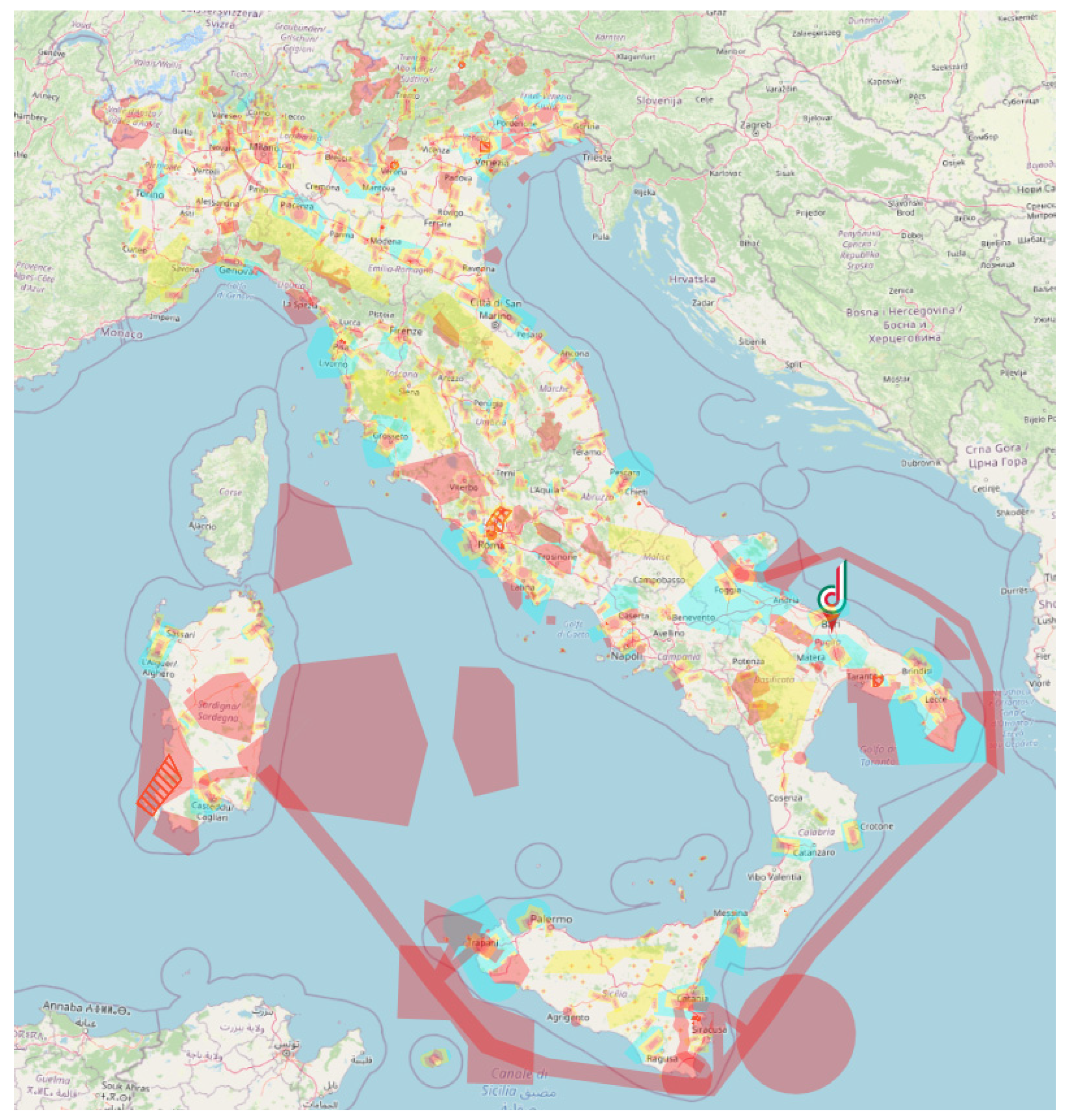
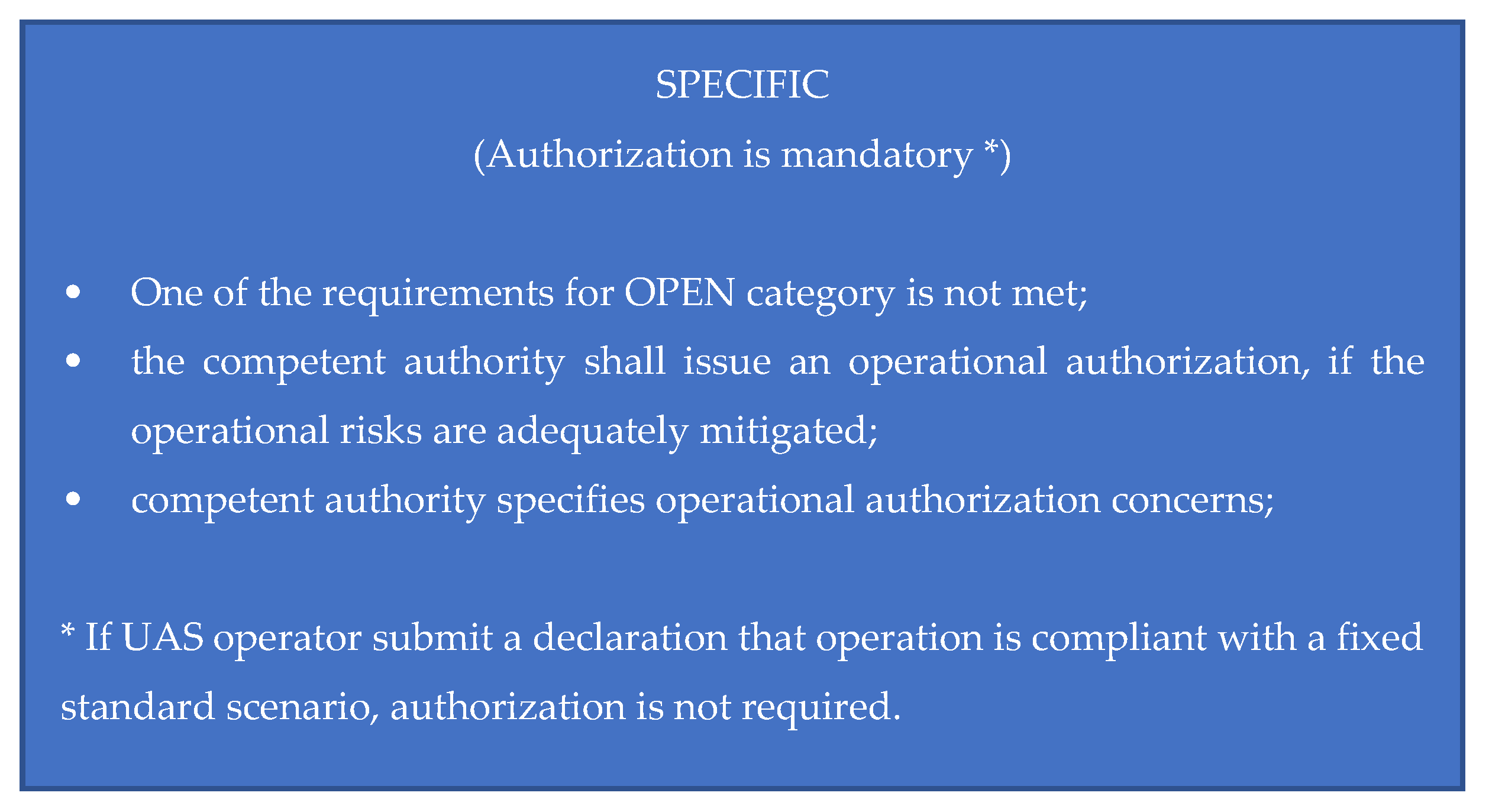
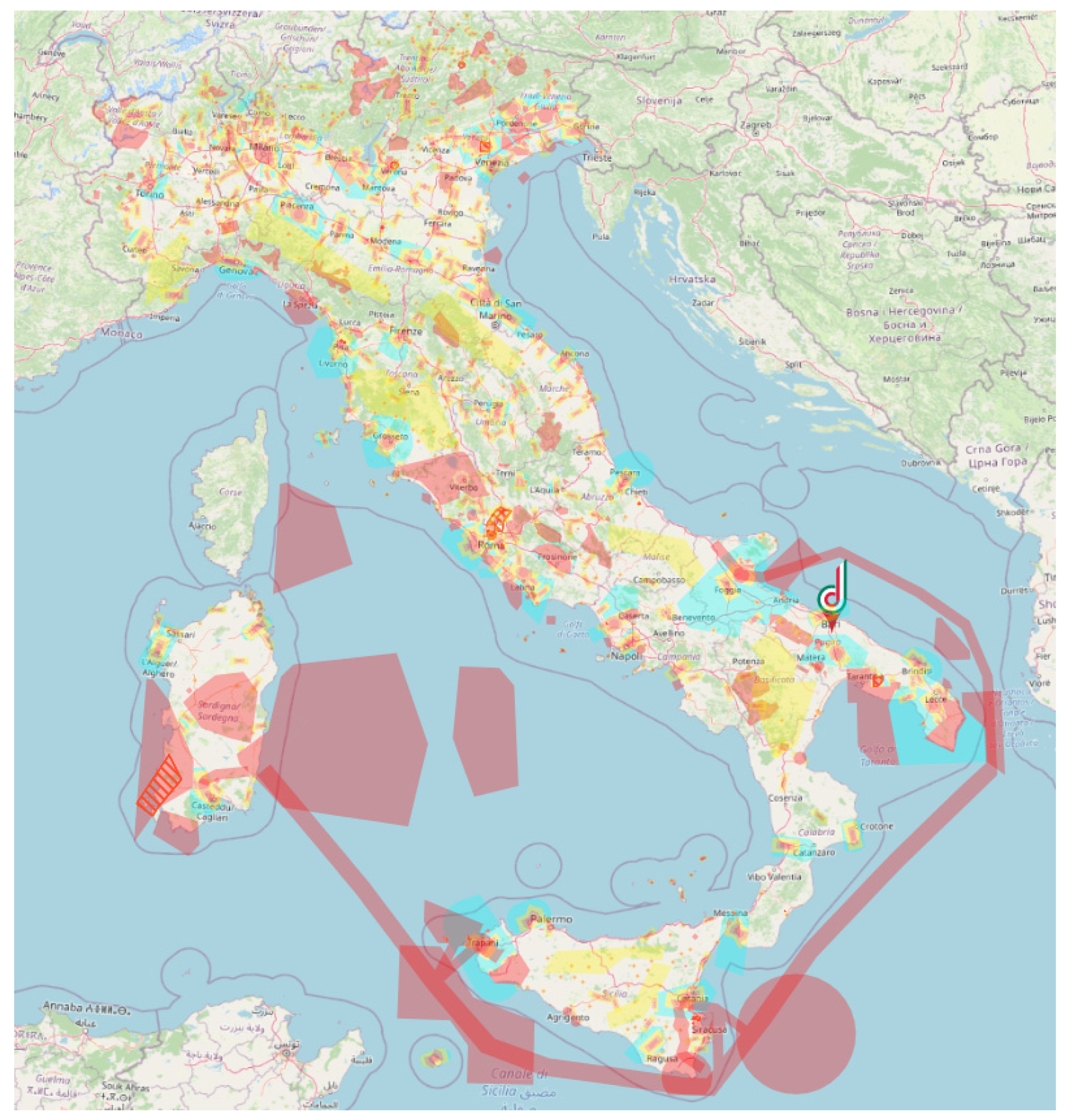
- The specific category covers riskier operations where safety is ensured by the drone operator, who must obtain an authorization from the national/local competent authority after conducting a safety risk assessment necessary for the safe operation of the UAV (Figure 5). The EASA specifies some standard risk scenarios, one for the urban context operations and another one for the extra-urban context operations. Therefore, if the operation is within the limits of a standard scenario, the operator can declare it, and no authorization is requested; obviously, this requires that the pilot has competence for that scenario.
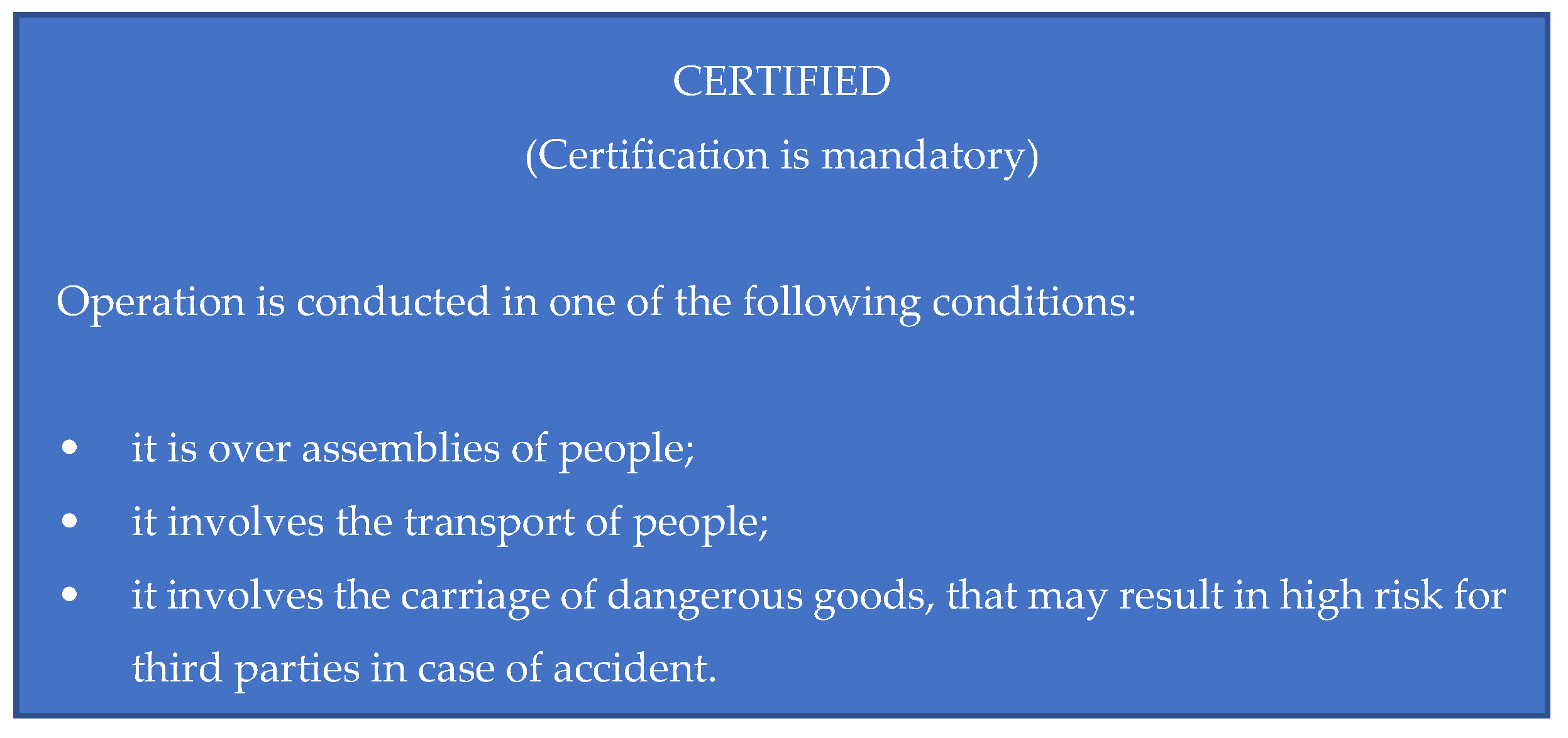
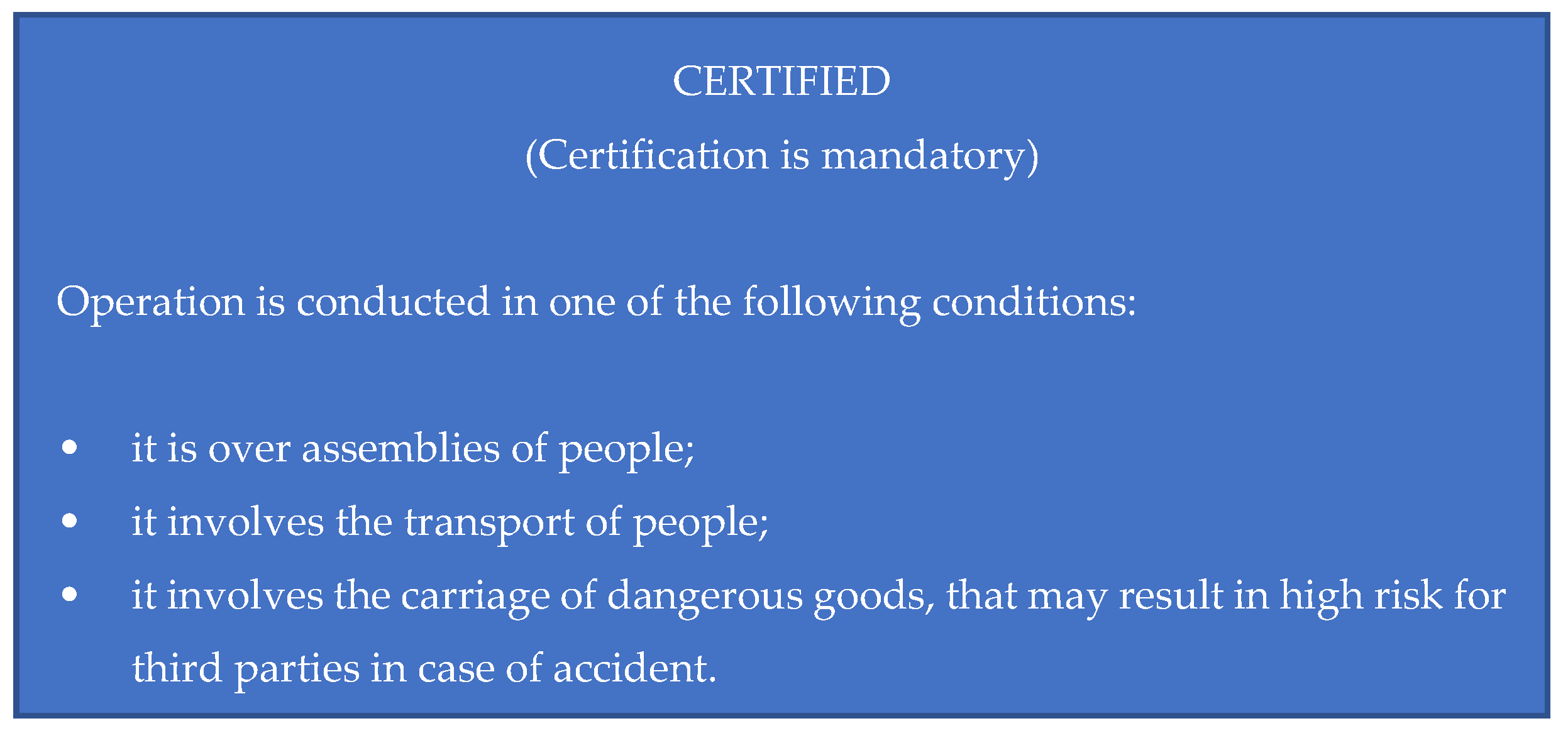
- The certified category covers the high-risk operations; therefore, the certification of the drone operator and aircraft is mandatory to ensure safety, beyond the licensing of the remote pilot (Figure 6). It is useful to underline that the certification requested for a UAV operation in a certified category is different form the authorization requested for a UAV operation in a specific category. Certification represents a higher level of security than authorization because it must satisfy more constraints.
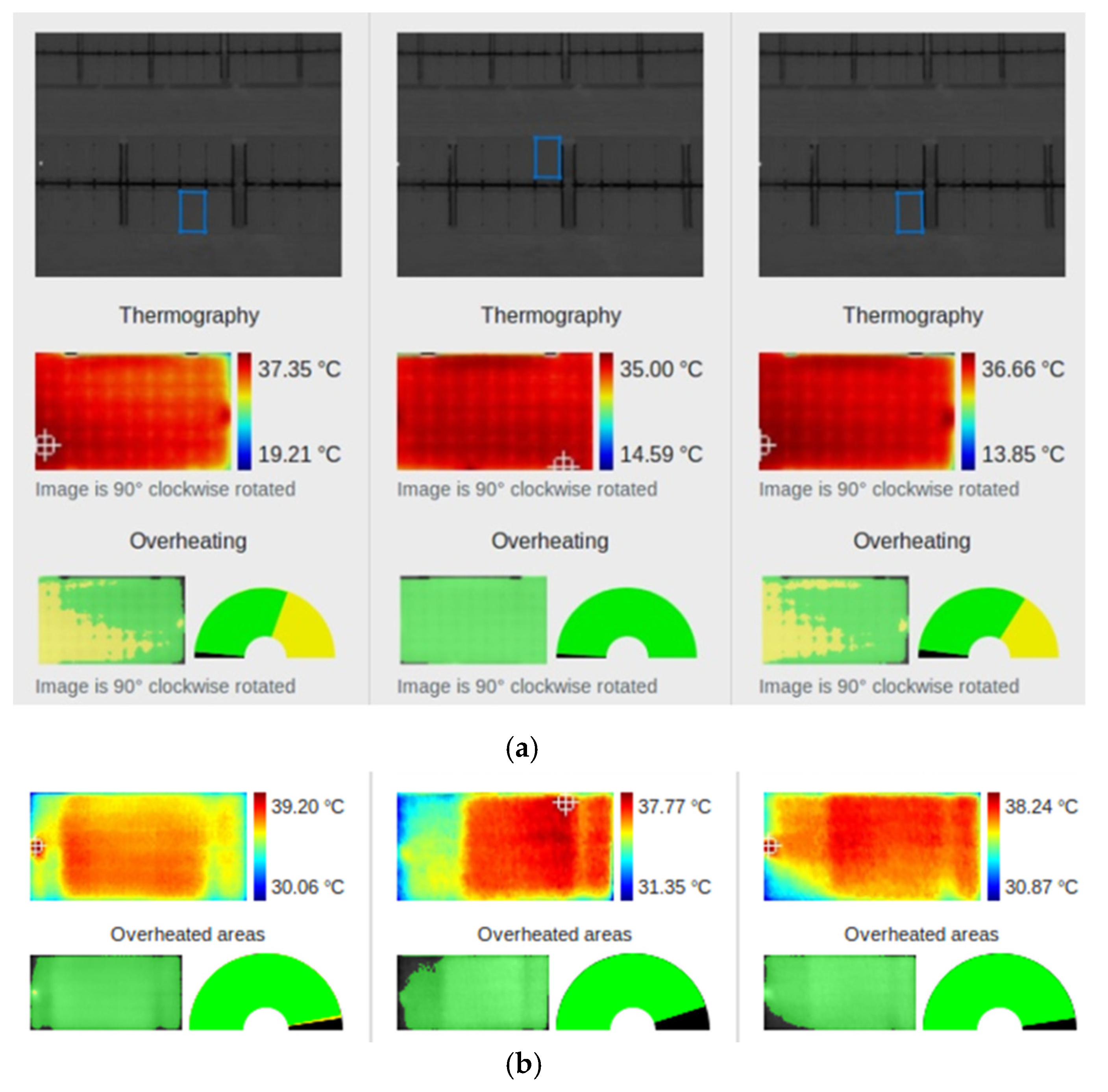
3.2. Simplified and Detailed Outdoor Infrared Inspection of PV Plants
- (a)
- irradiance, ;
- (b)
- wind speed, ;
- (c)
- cloud coverage, ;
- (d)
- soil, none or very low.
4. Improvements for Drone-Based IR Inspections Based on Several Case Studies
- impact of the view angle on the emissivity value;
- emissivity value to set in an IR camera, because it is different for a mid-wave and for a long-wave IR camera;
- correct reference temperature with which to compare the module temperature;
- impact of the air transmittance during the IR acquisition.
4.1. Emissivity and View Angle
4.2. Emissivity in Long-Wave and Mid-Wave IR Cameras
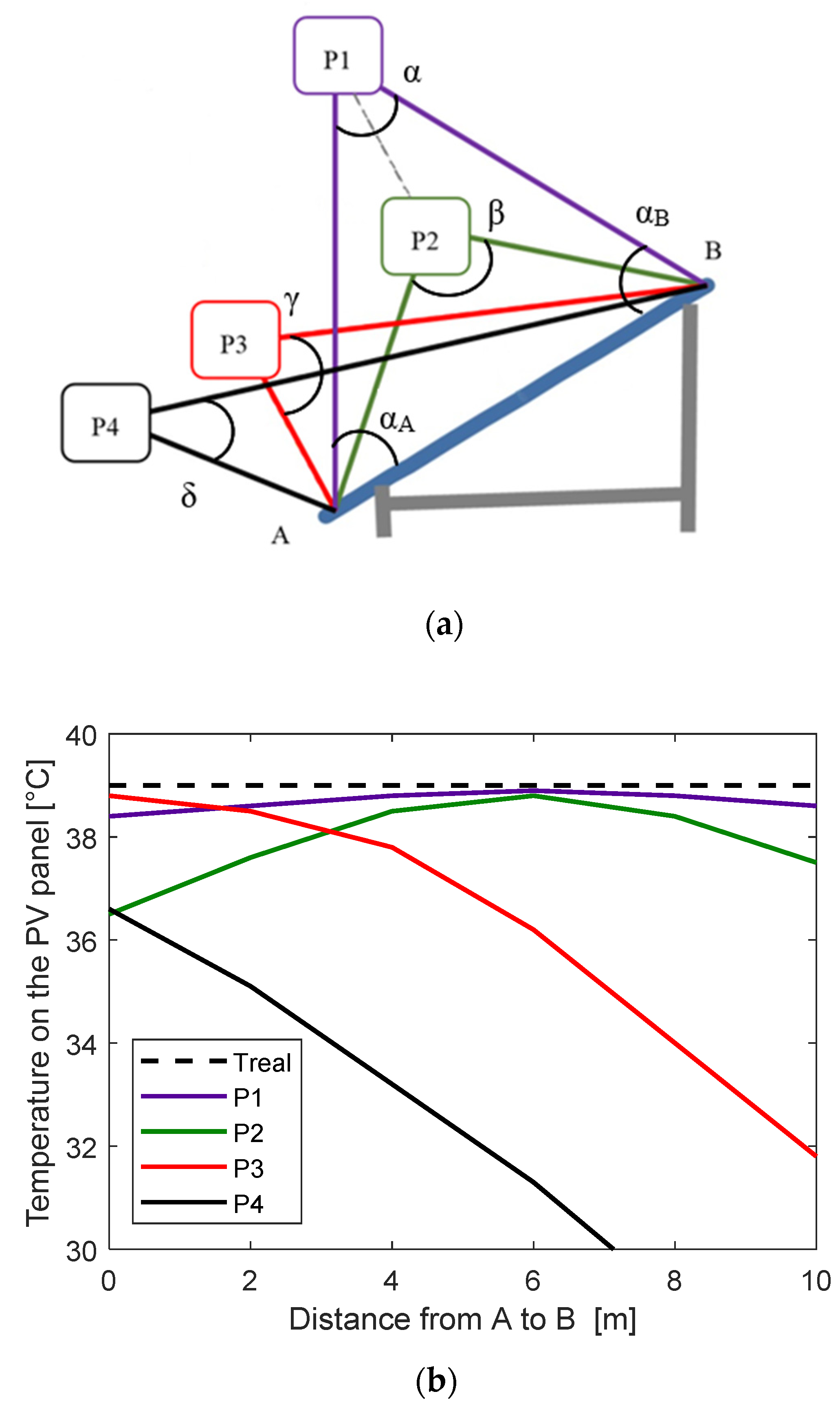
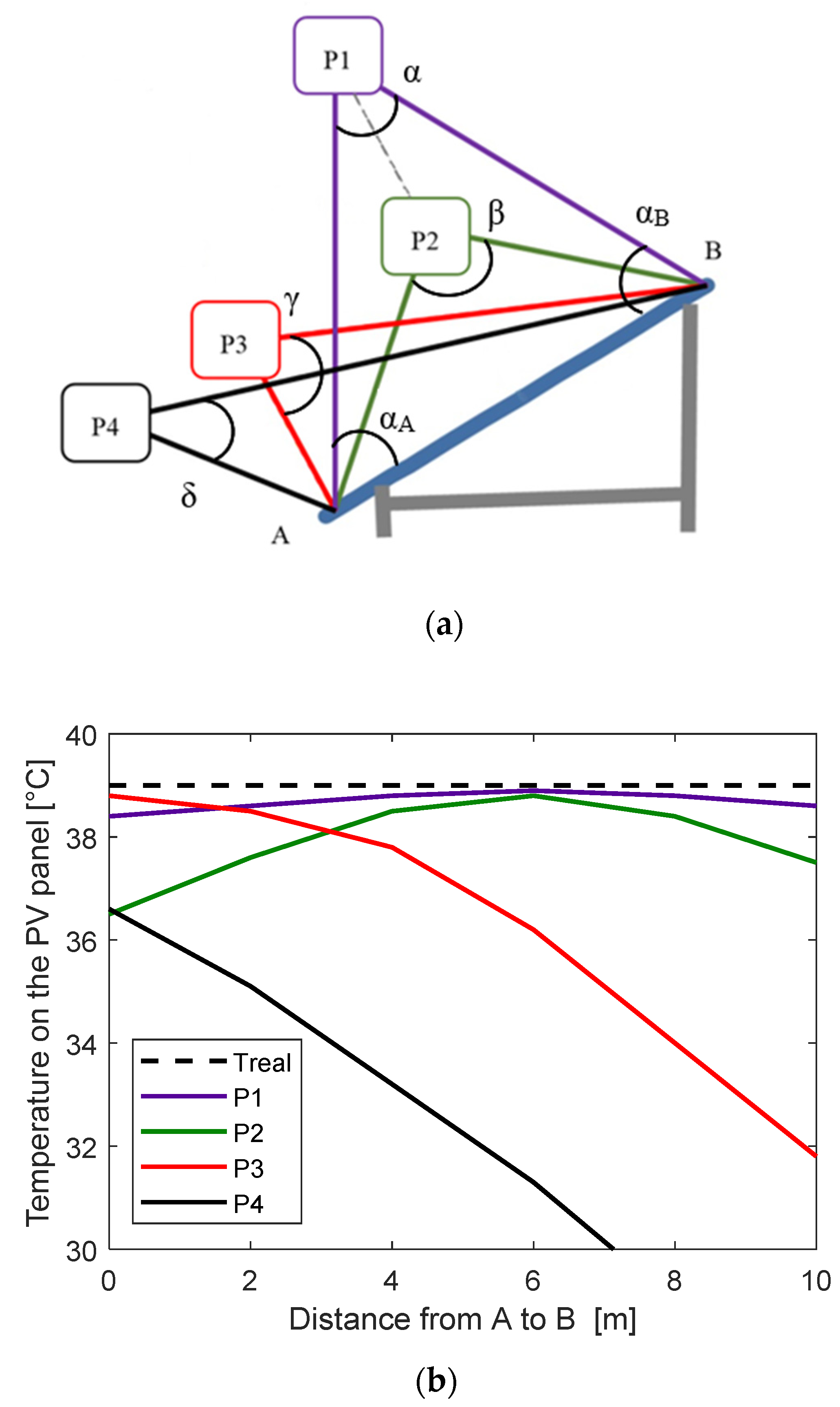
4.3. Normalized Reference Temperature
4.4. Air Transmittance
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature:
| ARP | Aerodrome Reference Point |
| ATC | Air Traffic Control |
| DISS | Diagnostics for Solar Systems |
| EASA | European Aviation Safety Agency |
| FAA | Federal Aviation Administration |
| IEC | International Electrotechnical Commission |
| IR | Infrared |
| MTOM | Maximum Take Off Mass |
| NOCT | Nominal Operating Cell Temperature |
| NMOT | Nominal Module Operating Temperature |
| O&M | Operation and Maintenance |
| PV | Photovoltaics |
| STC | Standard Test Conditions |
| Tref | Reference Temperature |
| UAS | Unmanned Aerial System |
| UAV | Unmanned Aerial Vehicle |
| VLOS | Visual Line of Sight |
References
- Breitenstein, O.; Rakotoniaina, J.P.; Al Rifai, M.H.; Werner, M. Shunt type in crystalline solar cells. Prog. Photovolt. Res. Appl. 2004, 12, 529–538. [Google Scholar] [CrossRef] [Green Version]
- Rakotoniaina, J.P.; Neve, S.; Werner, M.; Breitenstein, O. Material induced shunts in multicrystalline silicon solar cells. In Proceedings of the Conference Photovoltaics Europe, Rome, Italy, 7–11 October 2002; pp. 24–27. [Google Scholar]
- Skoplaki, E.; Palyvos, J.A. On the temperature dependence of photovoltaic module electrical performance: A review of efficiency/power correlations. Sol. Energy 2009, 83, 614–624. [Google Scholar] [CrossRef]
- Breitenstein, O.; Rakotoniaina, J.P.; Al Rifai, M.H. Quantitative evaluation of shunts in solar cells by lock-in thermography. Prog. Photovolt. Res. Appl. 2003, 11, 515–526. [Google Scholar] [CrossRef]
- Vergura, S.; Marino, F. Quantitative and computer aided thermography-based diagnostics for PV devices: Part I–framework. IEEE J. Photovolt. 2017, 7, 822–827. [Google Scholar] [CrossRef]
- Vergura, S.; Colaprico, M.; de Ruvo, M.F.; Marino, F. A quantitative and computer aided thermography-based diagnostics for PV devices: Part II–platform and results. IEEE J. Photovolt. 2017, 7, 237–243. [Google Scholar] [CrossRef]
- Harrou, F.; Sun, Y.; Kara, K.; Chouder, A.; Silvestre, S.; Garoudja, E. Statistical fault detection in photovoltaic systems. Sol. Energy 2017, 150, 485–499. [Google Scholar]
- Vergura, S. Hypothesis Tests-Based Analysis for Anomaly Detection in Photovoltaic Systems in the Absence of Environmental Parameters. Energies 2018, 11, 485. [Google Scholar] [CrossRef] [Green Version]
- Hafiz, F.; Awal, M.A.; Queiroz, A.R.d.; Husain, I. Real-Time Stochastic Optimization of Energy Storage Management Using Deep Learning-Based Forecasts for Residential PV Applications. IEEE Trans. Ind. Appl. 2020, 56, 2216–2226. [Google Scholar] [CrossRef]
- Gupta, N. Probabilistic Optimal Reactive Power Planning with Onshore and Offshore Wind Generation, EV, and PV Uncertainties. IEEE Trans. Ind. Appl. 2020, 56, 4200–4213. [Google Scholar] [CrossRef]
- Gupta, N. Gauss-Quadrature-Based Probabilistic Load Flow Method with Voltage-Dependent Loads Including WTGS, PV, and EV Charging Uncertainties. IEEE Trans. Ind. Appl. 2018, 54, 6485–6497. [Google Scholar] [CrossRef]
- Li, X.; Li, W.; Yang, Q.; Yan, W.; Zomaya, A.Y. An Unmanned Inspection System for Multiple Defects Detection in Photovoltaic Plants. IEEE J. Photovolt. 2020, 10, 568–576. [Google Scholar] [CrossRef]
- IEC TS 62446-3:2017; Photovoltaic (PV) Systems—Requirements for Testing, Documentation and Maintenance—Part 3: Photovoltaic Modules and Plants—Outdoor Infrared Thermography. IEC: Geneva, Switzerland, 2017.
- Vergura, S. Rules and Issues of Outdoor Infrared Inspection of Photovoltaic Modules by Unmanned Aerial Vehicle. In Proceedings of the IEEE-EEEIC International Conference on Environment and Electrical Engineering, Bari, Italy, 7–10 September 2021. [Google Scholar]
- IEC 61215; Terrestrial Photovoltaic (PV) Modules—Design Qualification and Type Approval. IEC: Geneva, Switzerland, 2016.
- Doll, B.; Hepp, J.; Hoffmann, M.; Schüler, R.; Buerhop-Lutz, C.; Peters, I.M.; Hauch, J.A.; Maier, A.; Brabec, C.J. Photoluminescence for Defect Detection on Full-Sized Photovoltaic Modules. IEEE J. Photovolt. 2021, 11, 1419–1429. [Google Scholar] [CrossRef]
- Kong, X.; Xi, Z.; Wei, S.; Ding, S.; Chen, L.; Yang, Q.; Yan, W. Infrared Vision Based Automatic Navigation and Inspection Strategy for Photovoltaic Power Plant Using UAVs. In Proceedings of the 2019 Chinese Control and Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 347–352. [Google Scholar]
- EN-ISO 9712:2012; Non-Destructive Testing-Qualification and Certification of NDT Personnel. UNI: Rome, Italy, 2012.
- Review of Failures of Photovoltaic Modules, Photovoltaic Power Systems Programme; Report IEA-PVPS T13-01:2014; IEA: Paris, France, 2014.
- European Aviation Safety Agency. Available online: https://www.easa.europa.eu (accessed on 9 February 2022).
- Easy Access Rules for Unmanned Aircraft Systems (Regulation (EU) 2019/947 and Regulation (EU) 2019/945). Available online: https://www.easa.europa.eu/document-library/easy-access-rules/easy-access-rules-unmanned-aircraft-systems-regulation-eu (accessed on 9 February 2022).
- Available online: https://www.d-flight.it/new_portal/ (accessed on 9 February 2022).
- Available online: https://www.easa.europa.eu/downloads/135909/en (accessed on 18 February 2022).
- Available online: https://www.easa.europa.eu/downloads/135912/en (accessed on 18 February 2022).
- Available online: https://www.faa.gov/uas/ (accessed on 18 February 2022).
- Vergura, S. Correct Settings of a Joint Unmanned Aerial Vehicle and Thermocamera System for the Detection of Faulty Photovoltaic Modules. IEEE J. Photovolt. 2021, 11, 124–130. [Google Scholar] [CrossRef]
- Bergman, T.L.; Lavine, A.S.; Incropera, F.P. Fundamentals of Heat and Mass Transfer, 7th ed.; John Wiley & Sons Incorporated: Hoboken, NJ, USA, 2011; ISBN 9781118137253. [Google Scholar]
- Kitamura, R.; Pilon, L.; Jonasz, M. Optical constants of silica glass from extreme ultraviolet to far infrared at near room temperature. Appl. Opt. 2007, 46, 8118–8133. [Google Scholar] [CrossRef] [PubMed]
- Krenzinger, A.; de Andrade, A.C. Accurate outdoor glass thermographic thermometry applied to solar energy devices. Sol. Energy 2007, 81, 1025–1034. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Over-Temperature | Power Loss | Hot Spot |
|---|---|---|
| 10 °C | 4% | Light |
| 10–20 °C | 4–10% | Medium |
| >20 °C | >10% | Strong |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vergura, S. Criticalities of the Outdoor Infrared Inspection of Photovoltaic Modules by Means of Drones. Energies 2022, 15, 5086. https://doi.org/10.3390/en15145086
Vergura S. Criticalities of the Outdoor Infrared Inspection of Photovoltaic Modules by Means of Drones. Energies. 2022; 15(14):5086. https://doi.org/10.3390/en15145086
Chicago/Turabian StyleVergura, Silvano. 2022. "Criticalities of the Outdoor Infrared Inspection of Photovoltaic Modules by Means of Drones" Energies 15, no. 14: 5086. https://doi.org/10.3390/en15145086
APA StyleVergura, S. (2022). Criticalities of the Outdoor Infrared Inspection of Photovoltaic Modules by Means of Drones. Energies, 15(14), 5086. https://doi.org/10.3390/en15145086